

Investigation of New Optical Solutions for the Fractional Schrödinger Equation with Time-Dependent Coefficients: Polynomial, Random, Trigonometric, and Hyperbolic Functions


Abstract
1. Introduction
2. M-Truncated Derivative
3. Wave Equation for FSE-TDCs
4. Exact Solutions of FSE-TDCs Equation
4.1. Mapping Method
4.2. The -Expansion Method
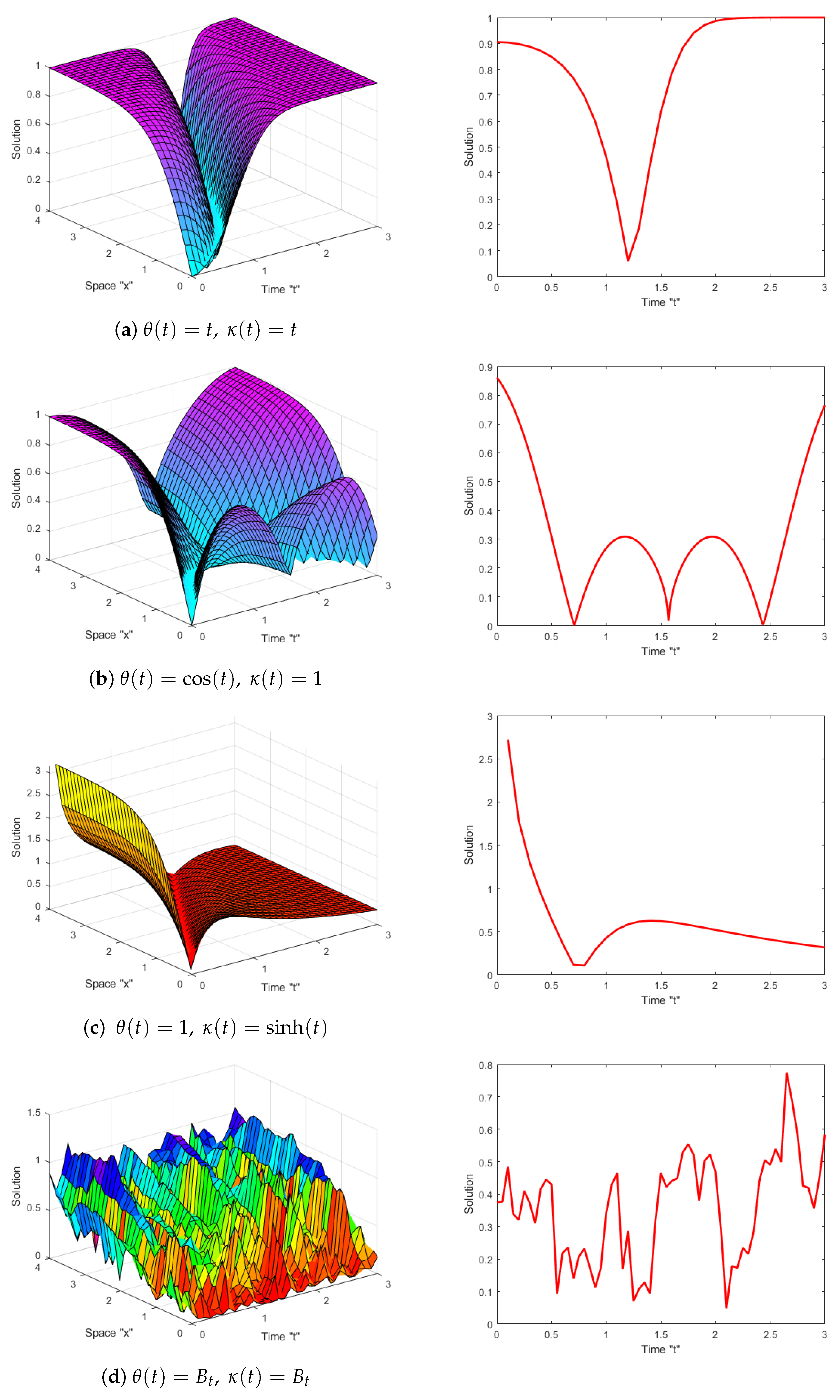
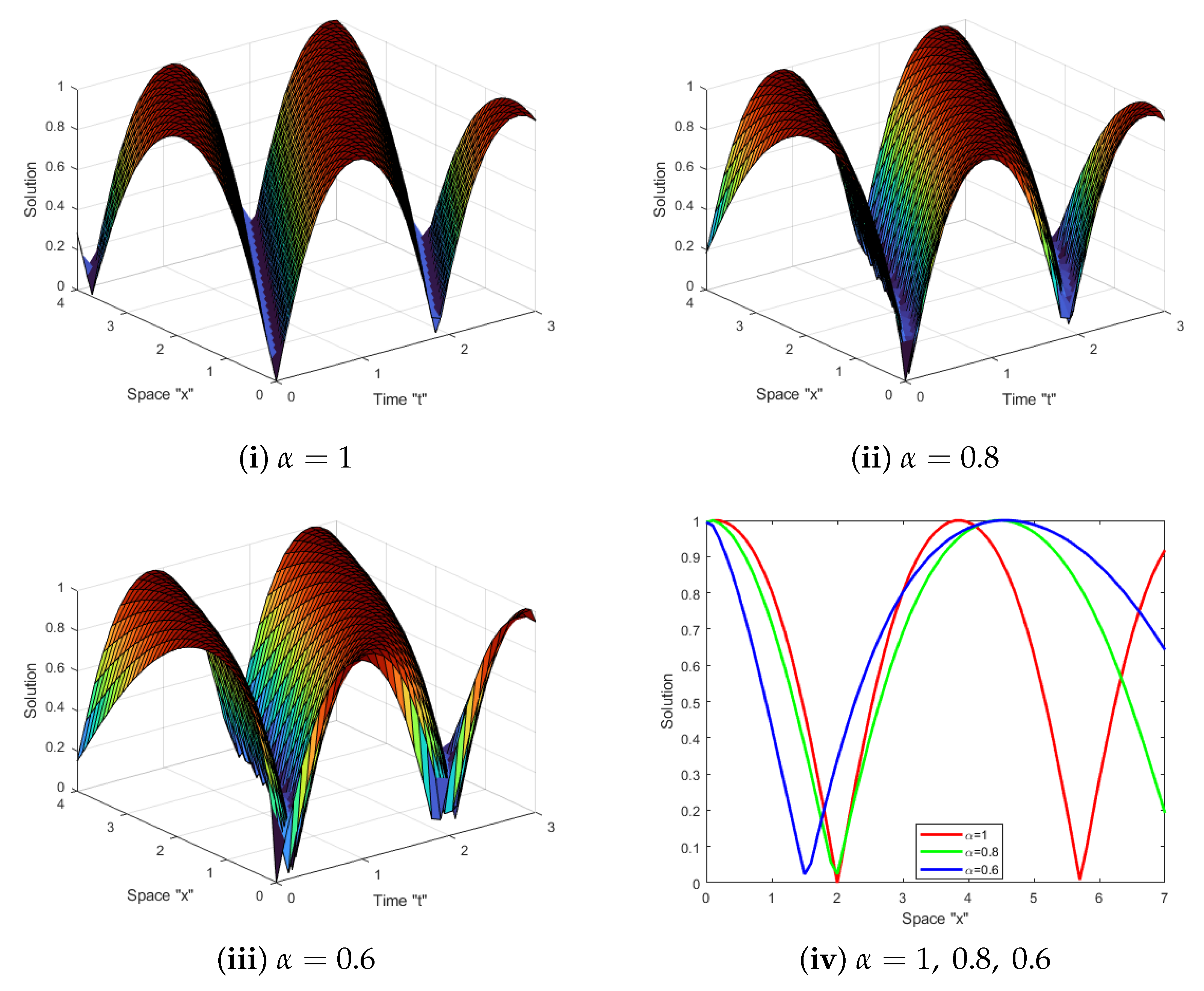
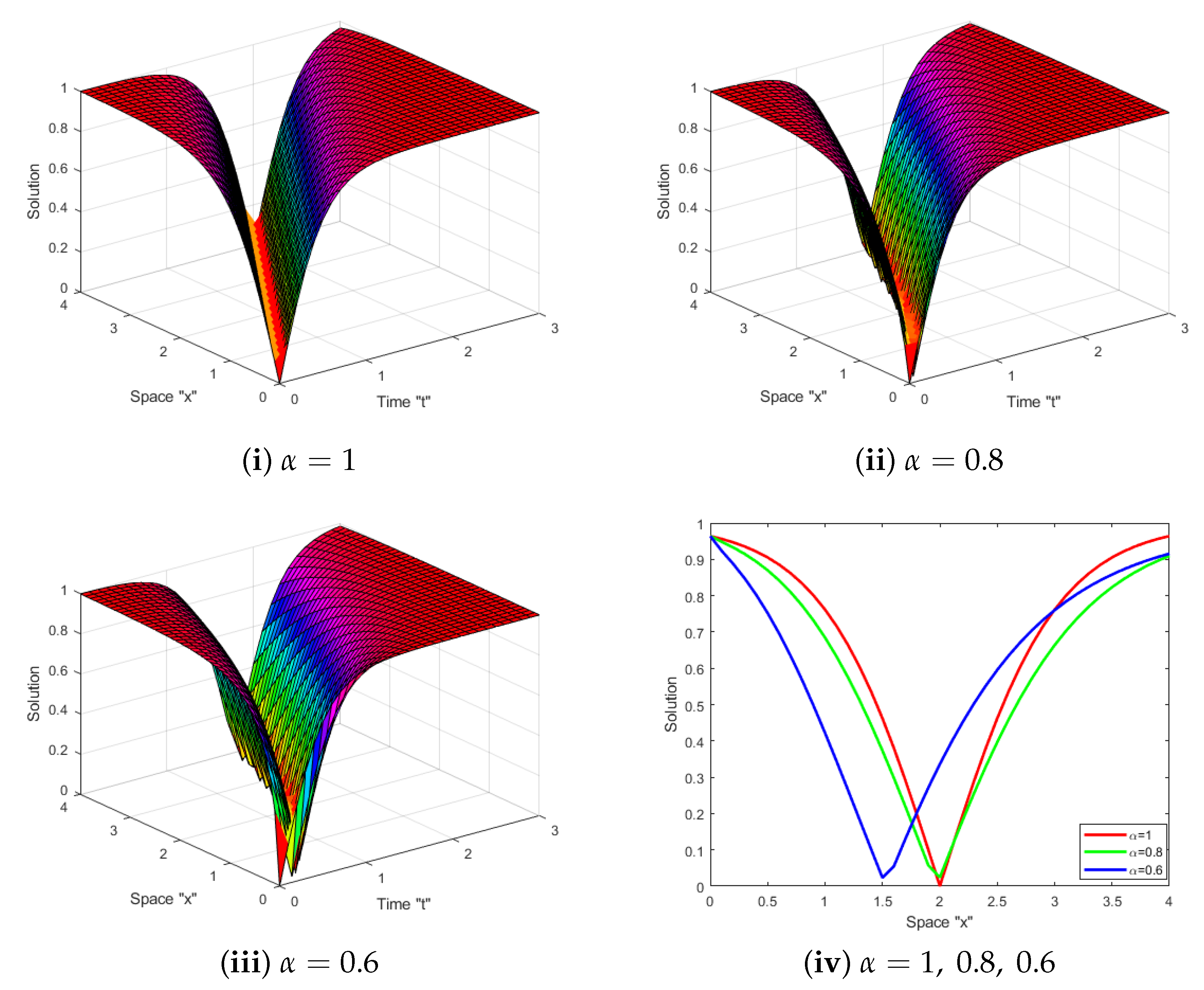
5. Effect of MTD and TDCs
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oldham, K.B.; Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Ntegration to Arbitrary Order; Mathematics in Science and Engineering; Academic Press: New York, NY, USA, 1974; Volume 11. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1999; Volume 198. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific Publishing: Singapore, 2000. [Google Scholar]
- Mohammed, W.W.; Cesarano, C.; Elsayed, E.M.; Al-Askar, F.M. The Analytical Fractional Solutions for Coupled Fokas System in Fiber Optics Using Different Methods. Fractal Fract. 2023, 7, 556. [Google Scholar] [CrossRef]
- Zeki, M.; Tinaztepe, R.; Tatar, S.; Ulusoy, S.; Al-Hajj, R. Determination of a Nonlinear Coefficient in a Time-Fractional Diffusion Equation. Fractal Fract. 2023, 7, 371. [Google Scholar] [CrossRef]
- Ismael, H.F.; Nabi, H.R.; Sulaiman, T.A.; Shah, N.A.; Ali, M.R. Multiple soliton and M-lump waves to a generalized B-type Kadomtsev–Petviashvili equation. Results Phys. 2023, 48, 106402. [Google Scholar] [CrossRef]
- Biswas, A. Solitary wave solution for KdV equation with power-law nonlinearity and time-dependent coefficients. Nonlinear Dyn. 2009, 58, 345–348. [Google Scholar] [CrossRef]
- Mohammed, W.W.; Iqbal, N.; Bourazza, S.; Elsayed, E.M. The optical structures for the fractional chiral nonlinear Schrödinger equation with time-dependent coefficients. Opt. Quantum Electron. 2024, 56, 1476. [Google Scholar] [CrossRef]
- Qi, J.; Zhu, Q. Further results about the non-traveling wave exact solutions of nonlinear Burgers equation with variable coefficients. Results Phys. 2023, 46, 106285. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Abdelaziz, M.A.M. Travelling wave solutions for the Burgers equation and the Korteweg-de Vries Equation with variable coefficients using the generalized (G′/G)-expansion method. Z. Naturforsch. 2010, 65, 1065–1070. [Google Scholar] [CrossRef]
- Injrou, S. Exact solutions for the Conformable space-time fractional Zeldovich equation with time-dependent coefficients. Int. J. Differ. Equ. 2022, 2020, 9312830. [Google Scholar] [CrossRef]
- Zhang, R.F.; Bilige, S.D. Bilinear neural network method to obtain the exact analytical solutions ofnonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 2019, 95, 3041–3048. [Google Scholar] [CrossRef]
- Qiao, J.M.; Zhang, R.F.; Yue, R.X.; Rezazadeh, H.; Seadawy, A.R. Three types of periodic solutions of new (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation via bilinear neuralnetwork method. Math. Methods Appl. Sci. 2022, 45, 5612–5621. [Google Scholar] [CrossRef]
- Wu, X.S.; Liu, J.G. Solving the variable coefficient nonlinear partial differential equations based on the bilinear residual network method. Nonlinear Dyn. 2024, 112, 8329–8340. [Google Scholar] [CrossRef]
- Zhang, R.F.; Li, M.C. Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 2022, 108, 521–531. [Google Scholar] [CrossRef]
- Kuzenov, V.V.; Ryzhkov, S.V.; Varaksin, A.Y. Development of a method for solving elliptic differential equations based on a nonlinear compact-polynomial scheme. J. Comput. Appl. Math. 2024, 451, 116098. [Google Scholar] [CrossRef]
- De Bouard, A.; Debussche, A. A stochastic nonlinear Schrödinger equation with multiplicative noise. Commun. Math. Phys. 1999, 205, 161–181. [Google Scholar] [CrossRef]
- De Bouard, A.; Debussche, A. A semidiscrete scheme for the stochastic nonlinear Schrödinger equation. Numer. Math. 2004, 96, 733–770. [Google Scholar] [CrossRef]
- Grecksch, W.; Lisei, H. Stochastic nonlinear equations of Schrödinger type. Stoch. Anal. Appl. 2011, 29, 631–653. [Google Scholar] [CrossRef]
- Bruneau, C.H.; Di Menza, L.; Lehner, T. Numerical resolution of some nonlinear Schrödinger-like equations in plasmas. Numer. Meth. PDEs 1999, 15, 672–696. [Google Scholar] [CrossRef]
- Li, J.B. Exact dark soliton, periodic solutions and chaotic dynamics in a perturbed generalized nonlinear Schrödinger equation. Can. Appl. Math. Q. 2009, 17, 161–173. [Google Scholar]
- Tian, S.F. The mixed coupled nonlinear Schrödinger equation on the half-line via the Fokas method. Proc. R. Soc. Lond. A 2016, 472, 0588. [Google Scholar] [CrossRef]
- Zayed, E.M.; Shohib, R.M. Solitons and other solutions to the resonant nonlinear Schrödinger equation with both spatio-temporal and inter-modal dispersions using different techniques. Optik 2018, 158, 970–984. [Google Scholar] [CrossRef]
- Öziş, T.; Yıldırım, A. Application of He’s semi-inverse method to the nonlinear Schrödinger equation. Comput. Math. Appl. 2007, 54, 1039–1042. [Google Scholar] [CrossRef]
- Taghizadeh, N.; Mirzazadeh, M.; Farahrooz, F. Exact solutions of the nonlinear Schrödinger equation by the first integral method. J. Math. Anal. Appl. 2011, 374, 549–553. [Google Scholar] [CrossRef]
- Riesz, M. L’intégrale de Riemann-Liouville et le problème de Cauchy pour l’équation des ondes. Bull. Soc. Math. Fr. 1939, 67, 153–170. [Google Scholar] [CrossRef]
- Wang, K.L.; Liu, S.Y. He’s fractional derivative and its application for fractional Fornberg-Whitham equation. Therm. Sci. 2016, 1, 54. [Google Scholar] [CrossRef]
- Miller, S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Caputo, M.; Fabrizio, M. A new definition of fractional differential without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 1. [Google Scholar]
- Sousa, J.V.; de Oliveira, E.C. A new truncated Mfractional derivative type unifying some fractional derivative types with classical properties. Int. J. Anal. Appl. 2018, 16, 83–96. [Google Scholar]
- Bhrawy, A.H.; Abdelkawy, M.A.; Kumar, S.; Johnson, S.; Biswas, A. Solitons and other solutions to quantum Zakharov–Kuznetsov equation in quantum magneto-plasmas. Indian J. Phys. 2013, 87, 455–463. [Google Scholar] [CrossRef]
- Wang, M.L.; Li, X.Z.; Zhang, J.L. The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372, 417–423. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, E.E.; Ennaceur, M.; Mohammed, W.W.; Algolam, M.S.; Ahmed, A.I. Investigation of New Optical Solutions for the Fractional Schrödinger Equation with Time-Dependent Coefficients: Polynomial, Random, Trigonometric, and Hyperbolic Functions. Fractal Fract. 2025, 9, 142. https://doi.org/10.3390/fractalfract9030142
Ali EE, Ennaceur M, Mohammed WW, Algolam MS, Ahmed AI. Investigation of New Optical Solutions for the Fractional Schrödinger Equation with Time-Dependent Coefficients: Polynomial, Random, Trigonometric, and Hyperbolic Functions. Fractal and Fractional. 2025; 9(3):142. https://doi.org/10.3390/fractalfract9030142
Chicago/Turabian StyleAli, Ekram E., Marwa Ennaceur, Wael W. Mohammed, Mohamed S. Algolam, and Athar I. Ahmed. 2025. "Investigation of New Optical Solutions for the Fractional Schrödinger Equation with Time-Dependent Coefficients: Polynomial, Random, Trigonometric, and Hyperbolic Functions" Fractal and Fractional 9, no. 3: 142. https://doi.org/10.3390/fractalfract9030142
APA StyleAli, E. E., Ennaceur, M., Mohammed, W. W., Algolam, M. S., & Ahmed, A. I. (2025). Investigation of New Optical Solutions for the Fractional Schrödinger Equation with Time-Dependent Coefficients: Polynomial, Random, Trigonometric, and Hyperbolic Functions. Fractal and Fractional, 9(3), 142. https://doi.org/10.3390/fractalfract9030142