1. Introduction
Due to the vast number of applications that can be found for fractional nonlinear/linear integro-differential equations
FrNIoEs/FrLIoEs containing time-dependent coefficients in physics, engineering, and other scientific domains, their significance has been growing steadily over the past several decades. These equations are ideal for accurately representing a variety of events that occur in the real world because they capture both the non-local and local behavior of a large number of complex systems. Hermann [
1] introduced some applications of fractional calculus to the field of physics. Oyedepo et al. [
2] presented a numerical solution to the linear
FrLIoDE problem by employing the method of standard least squares. Bernstein piecewise polynomials were exploited by Osama and Sarmad [
3] in order to find an approximate solution to the
FrLIoDE problem. In Daşcıoğlu and Bayram [
4], approximate solutions to
FrLIoDEs were found by using Laguerre polynomials. Mohammed [
5] utilized the approach of least squares in conjunction with a shifted Chebyshev polynomial in order to solve the
FrLIoDE problem. In [
6], Mahdy et al. investigated the numerical solution of
FrLIoDE by employing the least squares approach and supplementing it with a shifted Laguerre polynomial. In order to locate the numerical solution of
FrLIoDE with the Caputo derivative, Nanware et al. [
7] used the Bernstein polynomial to solve it. The least square technique and the homotopy perturbation method were both proposed by Oyedepo et al. [
8] to discuss the solution to the
FrIDE problem. Several techniques are used in efficient ways to solve
IE and
FrIE. For instance, Basseem and Alayani [
9] solved a nonlinear quadratic mixed IE of the second kind with a singular kernel by employing the Toeplitz matrix method in conjunction with the
PNT. A quadrature scheme was implemented by I. Katani [
10] for the numerical outcomes of the second type of the Fredholm integral (
FI) model. Al-Bugami [
11] employed the Simpson and Trapezoidal methods to perform numerical representations based on an integral model that utilized 2D surface crack layers. In order to obtain numerical computing results for the second kind of nonlinear integral model that has a continuous kernel, Brezinski and Zalglia [
12] employed the extrapolation method. Baksheesh [
13] suggested making use of the Galerkin scheme in order to find the approximate solution for the
VIEs of the second kind. The sinc-collocation method was utilized by Alkan and Hatipoglu [
14] to find solutions of
V-FIDEs of fractional order. Mosa et al. [
15] researched the semigroup scheme to evaluate uniqueness and existence based on the partial and fractional integro models of heat performance in the Banach space using the Adomian decomposition scheme. An effective methodology for finding an approximate solution using the wavelet collocation method to
FrFIDEs was proposed by Bin Jebreen and Dassios [
16]. Using the extended cubic B-spline, Akram et al. [
17] interpreted the collocation strategy in order to solve the fractional partial integro-differential problem. After employing the Riemann–Liouville fractional integral and fractional derivative, Abdelkawy et al. [
18] used the Jacobi–Gauss collocation method to achieve an approximate solution for a variable-order of
FrLIoDE with a weakly singular kernel. This was accomplished by applying the Jacobi–Gauss collocation method. Khalil [
19] used a Jacobi polynomial for a solution of coupled system of fractional differential equations. Some different numerical methods for
NLIoEs are introduced in Abdou [
20].
This paper is divided into 12 sections. In
Section 2, we derive the fractional mixed integral equation from the phase lag mixed integral equation. In
Section 3, using a mixed
NIE of the second kind with local conditions, we establish
FrNIoDE, using the Caputo-fractional integral. In addition, the existence of a unique solution is guaranteed. In
Section 4, the convergence of this solution is established and proved. In
Section 5, the technique of separation variables method is applied to change the problem to
HNIE of the second kind where its coefficients are parameters of time.
PNT is employed in
Section 6 to obtain the
NAS. Then, we discuss the existence and uniqueness solution of
NAS in
Section 7. While the convergence system is considered in
Section 8, the estimated error of
PNT is discussed in
Section 9. Illustrative numerical examples are involved to demonstrate the propriety and effectuality of the technique and some conclusions are stated in
Section 10 and
Section 11. In
Section 12, we propose some parameters for our future work.
2. Time Fractional and Phase Lag Integral Equation
The integral equations play an important role in the phase-lag problems with local conditions. Consider, in the time fractional calculus, the phase lag integral equation:
with conditions
where
is a known function in the space
represents the free term of the problem,
is a constant that depends on the kind of material (in applied mathematics and has many physical meanings). The function
is a smooth kernel in time, while
is a singular kernel in position, which will be taken as a logarithmic form and Carleman function,
is a known nonlinear function of the unknown function
,
and
are two given initial position functions, the constant
is a small quantity that represents the delay of time.
Here, the aim of this research is to predict the near future, by studying fractional derivatives, and using the initial conditions, where it is known that the differential derivatives express the breaking of the ionic bond between the particles of the substance, and that the use of fractional time enables the researcher to deepen this study. The past time is studied when q is negative.
Abdou and Raad [
21] and Mosal et al. [
22] discussed the solution of mixed IE with nonlocal conditions. However, in this research, the above is developed by studying the fractional delay over time for a local phase-lag problem of a
FrNMIoDE with continuous kernel in time and singular kernel in position.
Using Taylor’s expansion, in the fractional calculus, to have
In this work, we have focused on
Using the basic formula of the Caputo-fractional integral
and
In the view of Equations (1) and (4), we have
Applying Equations (5)–(7) in Equation (8), we obtain
where
In order to guarantee the existence of a unique solution of the considered problem of Equation (1) or its equivalent in Equation (9), we assume the following conditions:
- (i)
The unknown function and its derivatives are in the space and its norm is defined as
- (ii)
For the constant , the known function satisfies the following conditions:
- (iii)
The given function satisfies
- (iv)
The two functions for the constants satisfy the following:
- (v)
The position kernel in the space
satisfies
- (vi)
The continuous function
in time satisfies
3. Existence and Uniqueness
To prove the existence and uniqueness of Equation (9), it can be written in the following integral operator form
Theorem 1. The solution of Equation (9) exists and is unique under the condition: The following lemmas must be proved to satisfy the above theorem.
Lemma 1. The operator maps the space onto itself under the conditions (i)–(vi).
Proof. From Equation (10), we obtain
Using conditions (i)
–(v) and Cauchy–Schwartz inequality, we have
where
It is obvious that the operator
maps the ball
onto itself where
The inequality (13) involves the boundedness of the operator under the condition δ < 1. □
In the previous Lemma, we considered that the discontinuous kernel , satisfies for every continuous function or
Lemma 2. If conditions (i)–(vi) are satisfied, then is a contraction operator in Banach space
Proof. Let two functions
and
be two solutions of (9), and then, the Formula (10) leads to the
Using conditions (i)–(iv) and Cauchy–Schwarz inequality, we deduce that
It follows that for δ < 1, is a contraction operator of Equation (10). Hence, there exists a unique solution in by a Banach fixed point theorem for every . □
4. Convergence of Solution
For this aim, take the straightforward iteration
Then, use Equation (9), to have
let
where
Lemma 3. A sequence of Equation (17) is uniformly convergent under the condition
Proof. By applying Cauchy–Schwarz and using (17) in (16), we obtain
Taking
, the above formula becomes
and then
The sequence is uniformly convergent by Equation (19). Additionally, it gives the sequence’s convergent solution.
As , hence the solution is uniformly convergent under the condition . This demonstrates the lemma. □
5. Separation of Variables Technique
We discover that researchers are drawn to the unknown potential function, which is connected to time and place, in the issues of mathematical physics. The unknown function can be obtained using a variety of approaches. Time division is one of these techniques, converting the mixed integral problem into an algebraic system of integral equations.
Some researchers use the separation technique method which is a powerful mathematical tool that allows us to transform
FrNIoE with time-dependence into a class of integral equations with coefficients on time only. This technique simplifies the problem by separating the time-dependent part from the integral part, enabling us to handle the integral equations more efficiently. The unknown and well-known functions are shown in the separation form as
Hence, after using (20), the Formula (9) yields,
where
Equation (21) considers HIE of the second kind with coefficients specifying the time domain . Here, and indicate the time term of the unknown function Meanwhile, describes the time in the free term .
6. Product Nystrom Technique (PNT)
To solve integral equations with continuous or disconnected kernels, several numerical approaches have been utilized. The PNT is the best approach for solving singular integral equations for the following reasons: the singular term vanishes instantly, turned into simple integrals that can be solved rapidly, and then creates a NAS. The relative error approach has a lower degree of convergence than the other methods.
Here, by using the product integration, we approximate the integral part of Equation (21) by a suitable Lagrange interpolation polynomial. For this, let
and the integral part can be written as
Without sacrificing generality, we take , where and is an even number.
The Lagrange interpolation polynomial is used to approximate the nonsingular component of the integral throughout each interval
at the points 2
n, 2
n + 1 and 2
n + 2. As a result, the integral term of (23) becomes
Comparing Equations (23) and (24), we deduce
Introduce the following notations
and
then
By substituting in Equation (21), we obtain
Equation (28) represents the NAS which gives an approximate solution of Equation (4) in a certain domain of time.
7. The Existence of a Unique Solution of NAS
To prove the existence of a unique solution of Equation (28), we write it in the following operator form
where the following assumptions are held:
- (a)
The parameters satisfy where are constants.
- (b)
- (c)
where are constants.
- (d)
- (e)
The unknown function is in the space and its norm is defined as
- (f)
For the constant , the known function satisfies the following conditions:
Theorem 2. The approximate solution of the NAS of Equation (28) exists and unique under the condition The following lemmas must be proved to satisfy the above theorem.
Lemma 4. The operator maps the space onto itself under the conditions (a)–(f).
Proof. From Equation (29), applying Cauchy–Minkowski inequality, we obtain
using the conditions (a)–(f), we obtain
so, we have
where
It is obvious that the operator
maps the ball
×
C[0,
T] onto itself where
The inequality (33) involves the boundedness of the operator under the assumption . □
Lemma 5. If conditions (a)–(f) are satisfied, then is a contraction operator in Banach space
Proof. Let two functions
and
be two solutions of (29), and then, the Formula (31) leads to
Using conditions (a)–(f) and Cauchy–Minkowski inequality, we obtain
It follows that for < 1, is a contraction operator of a system (36). Hence, there exists a unique solution in by a Banach fixed point theorem for every .
8. Convergence of the Approximate Solution of NAS
To discuss the convergence of the system (28), we state the following theorem.
Theorem 3. The NAS (28) for all values of time is convergent in the Banach space under the condition
Proof. We construct the sequence
and using Equation (29), we have
consider
where
By applying Cauchy–Schwarz and using (38) in (37), we obtain
Taking
, the above formula becomes
and then
The sequence is uniformly convergent by Equation (39). Additionally, it gives the sequence’s convergent solution.
As , hence the solution is uniformly convergent under the condition . This demonstrates the lemma. □
9. The Error of the Product Nystrom Technique
The following two definitions are used to calculate the error of this technique:
Definition 1. The Nystrom method is said to be convergent of order in the interval [−1, 1], if and only if, for sufficient large, there exists a constant independent of such that
Definition 2. The estimated error of this method can be calculated in the form As , . In this case, the approximate solution of (28) is equivalent to the exact solution of (21) in the space .
10. Numerical Results
In this section, some numerical applications are considered to show the accuracy and applicable of the proposed methods.
Then, by taking
and
, we obtain
where
is given by putting
as an exact value. We have the following two cases:
Case (i): if and the unknown function have the same function of time where .
Case (ii): if and the unknown function have different time function in which
Example 2. Consider Equation (41) with , we obtain Here, is given by putting as an exact value.
The rate of errors is evaluated using the following formula:
11. Conclusions
Fractional calculus has proved to be a valuable tool for modeling and analyzing numerous phenomena with non-local and memory-dependent characteristics. In this research, we focus on the study of fractional nonlinear integral equations with a time-dependent coefficient using the separation technique method. By employing this approach, we aim to transform the integral equation into a class of integral equations with coefficients on time, which can be subsequently solved using the Nystrom method. From the previous work and discussion, we can establish the following:
The separation technique method is a powerful mathematical tool that allows us to transform fractional nonlinear integral equations with time-dependent coefficients into a class of integral equations with coefficients on time only. This technique simplifies the problem by separating the time-dependent part from the integral part, enabling us to handle the integral equations more efficiently.
We present the Nystrom method as a numerical scheme to solve the sub-equations derived from the separation process. The Nystrom method efficiently discretizes the integral equation using a set of points and exploits the smoothness of the kernel functions to achieve high accuracy and computational efficiency. We discuss the convergence analysis and error estimates associated with the Nystrom method for the proposed fractional integral equations.
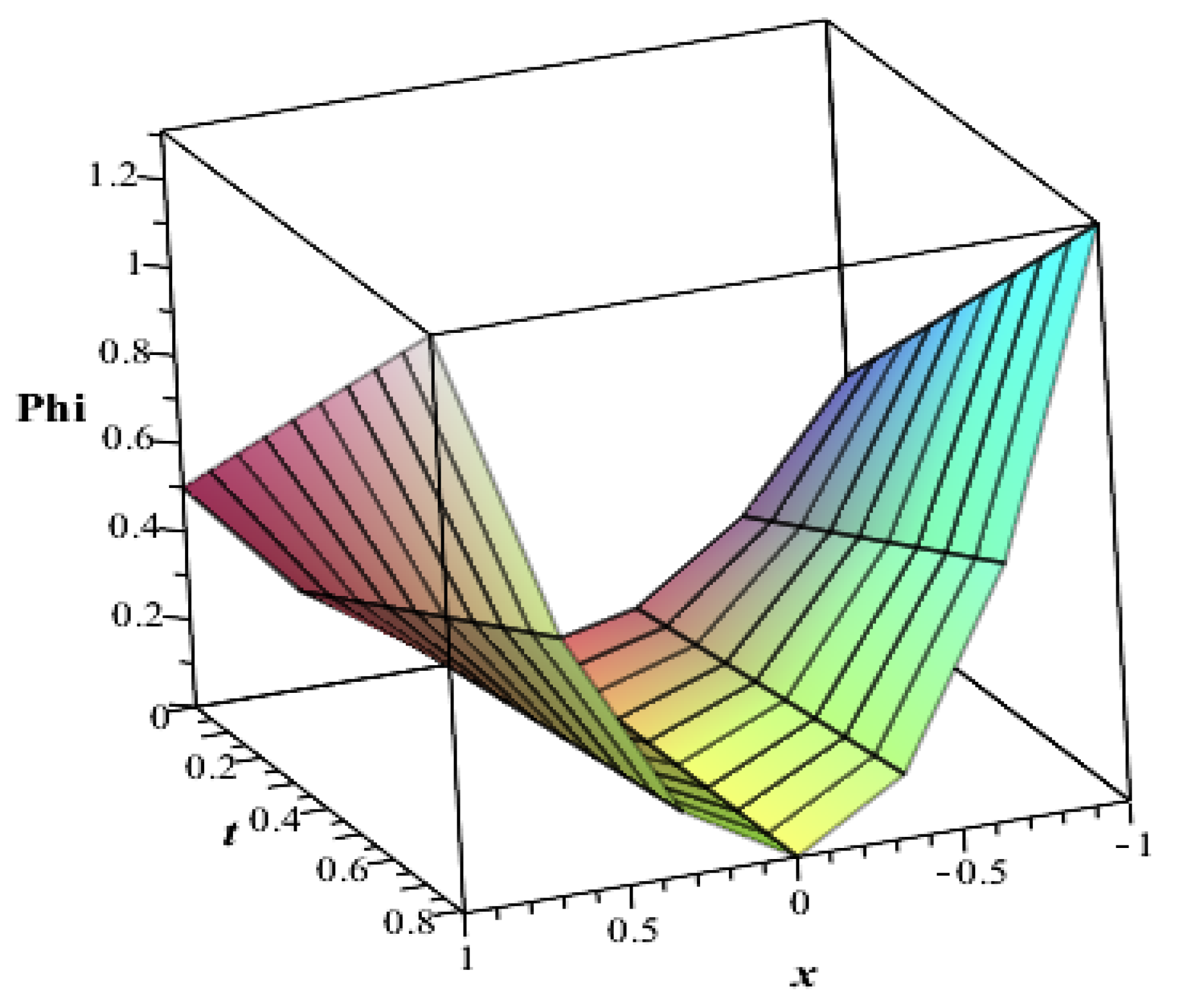
In the Carleman kernel, when decreasing
, the solution becomes better, see
Table 1.
CPU Time for Intel® Core(TM) i7 CPU M 620 @ 2.67 GHz (64-bit Operating system) in example 2 takes the following:
| N | Time in Seconds | Memory |
| 4 | 10.4 | 59 M. |
| 8 | 14.34 | 219.19 M. |
| 16 | 34.32 | 215.9 M. |
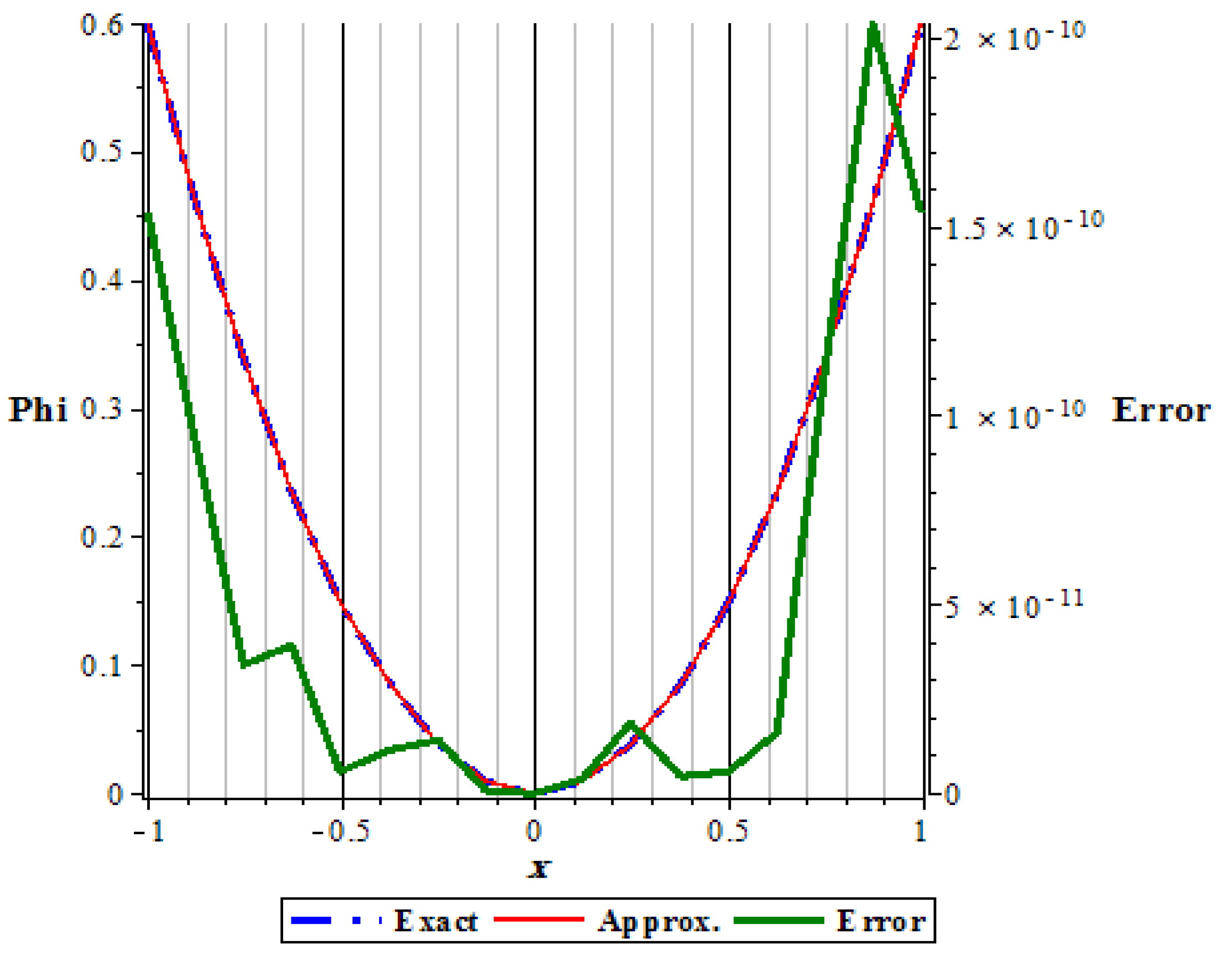
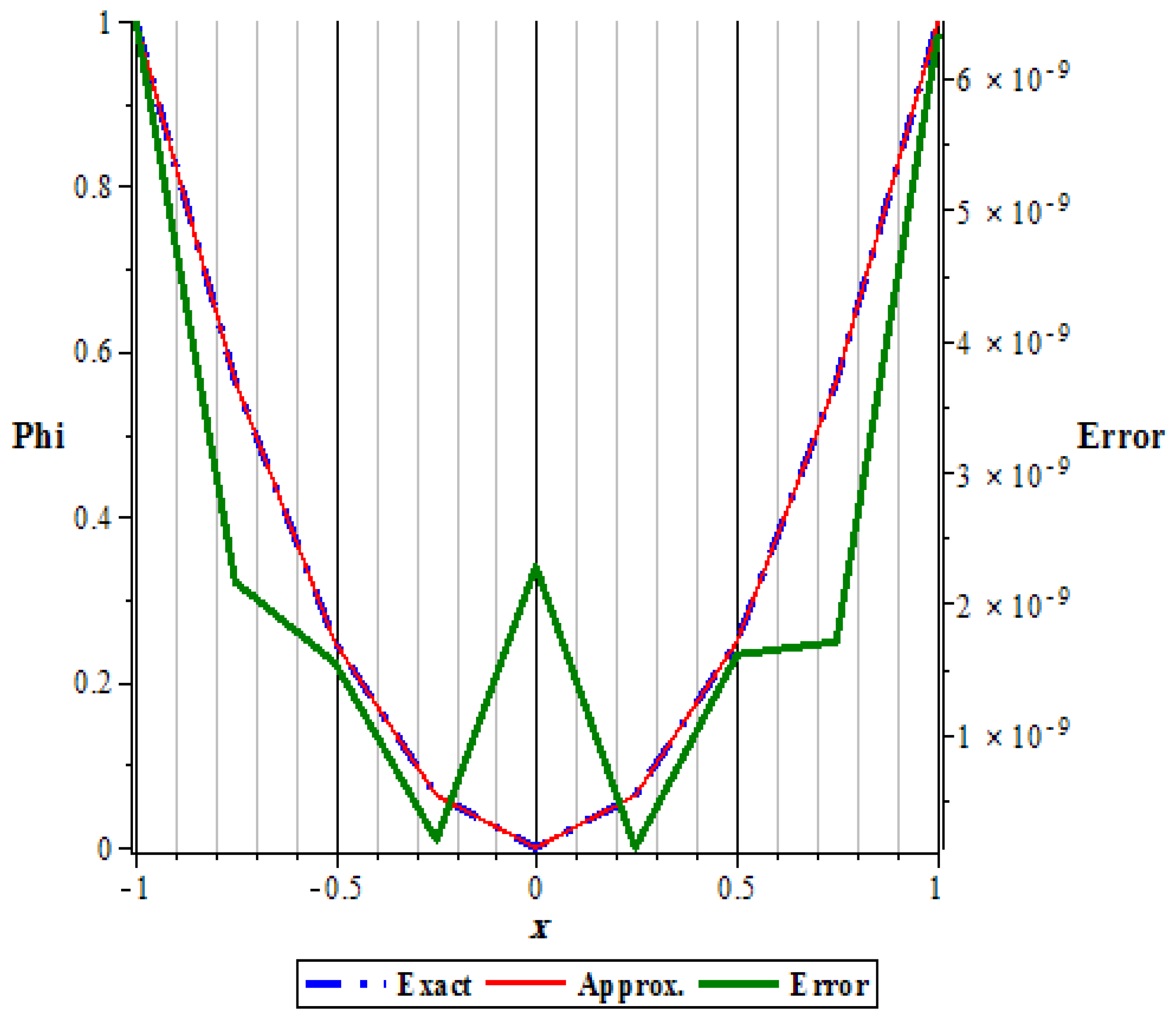
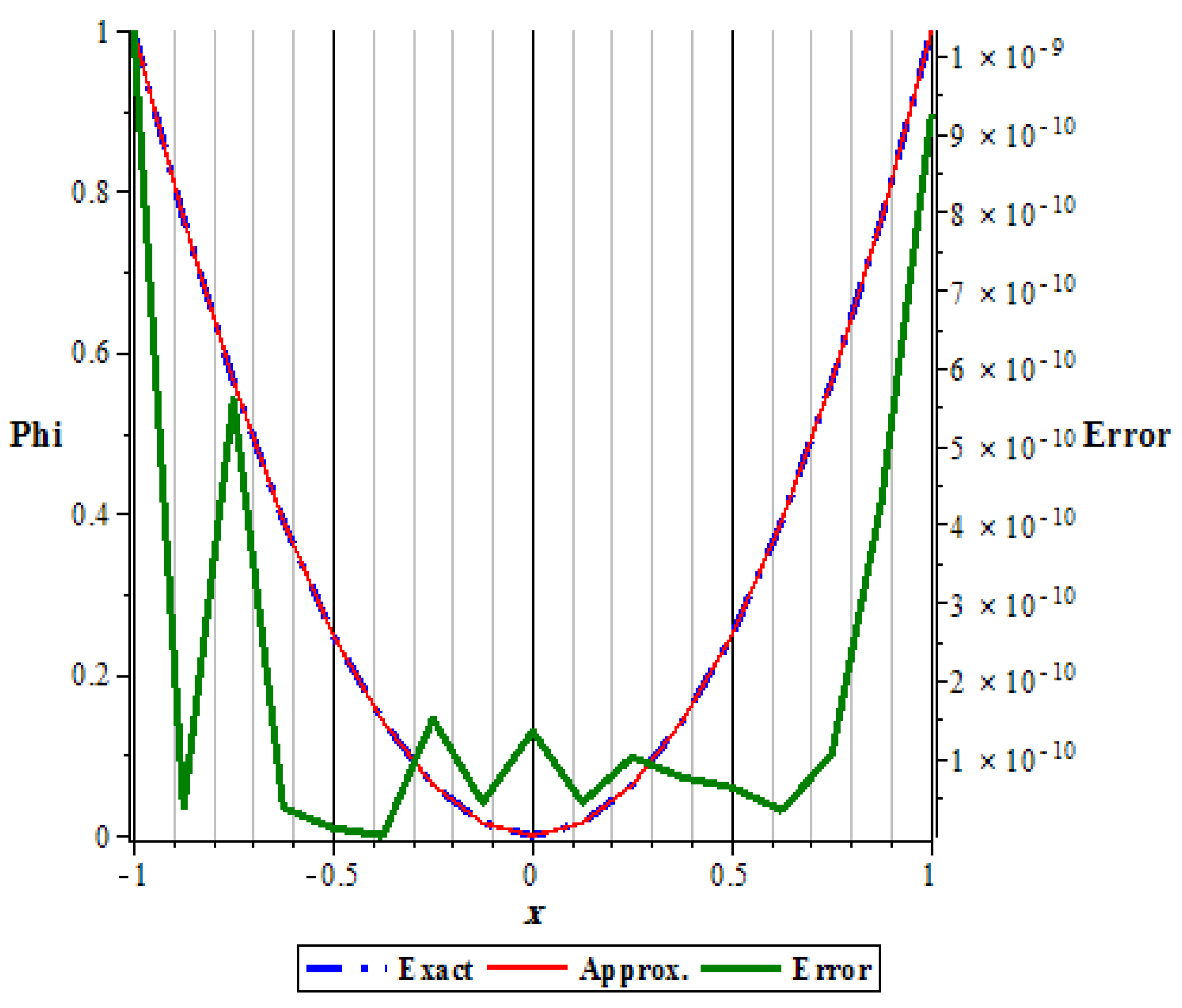
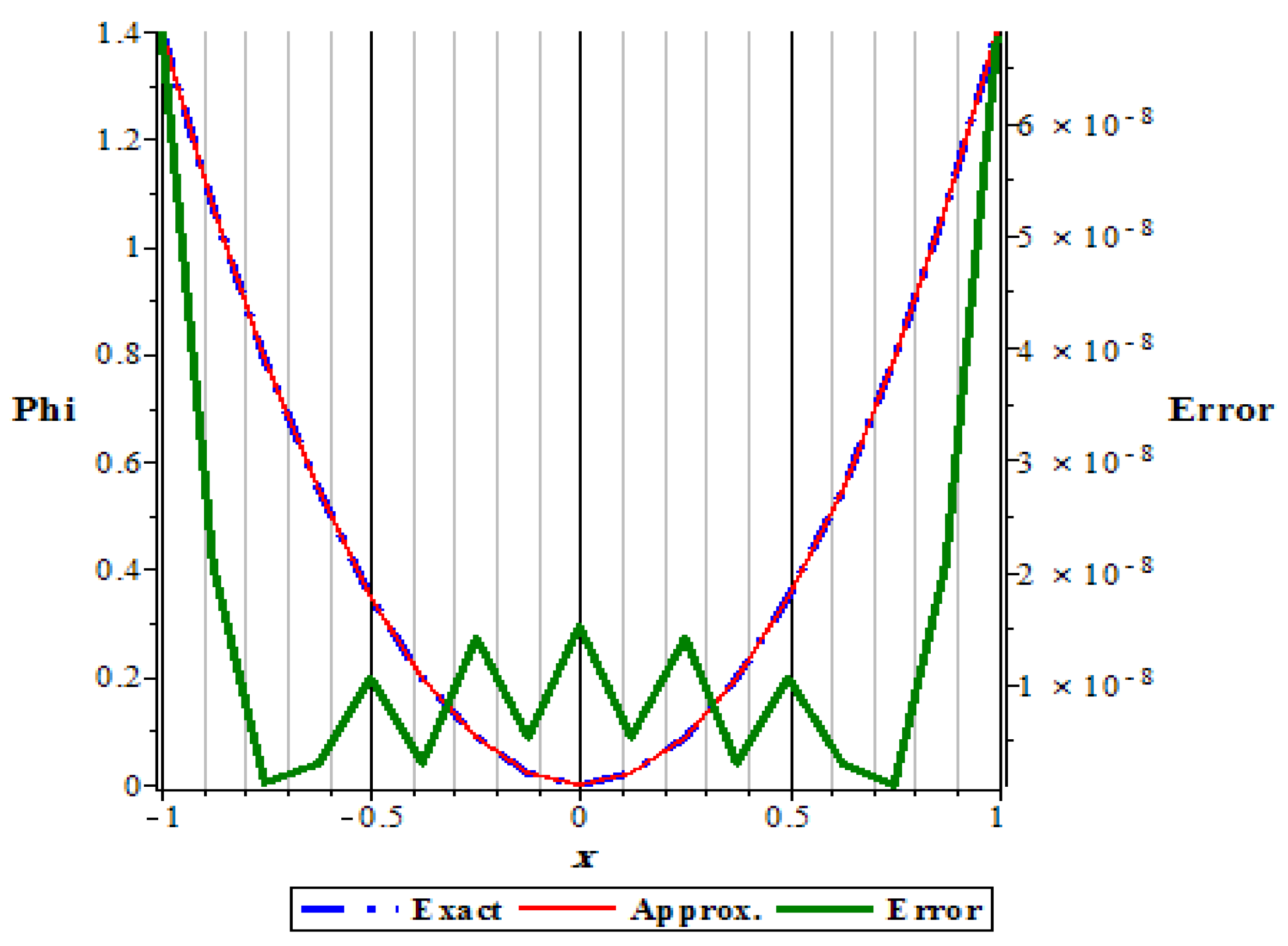
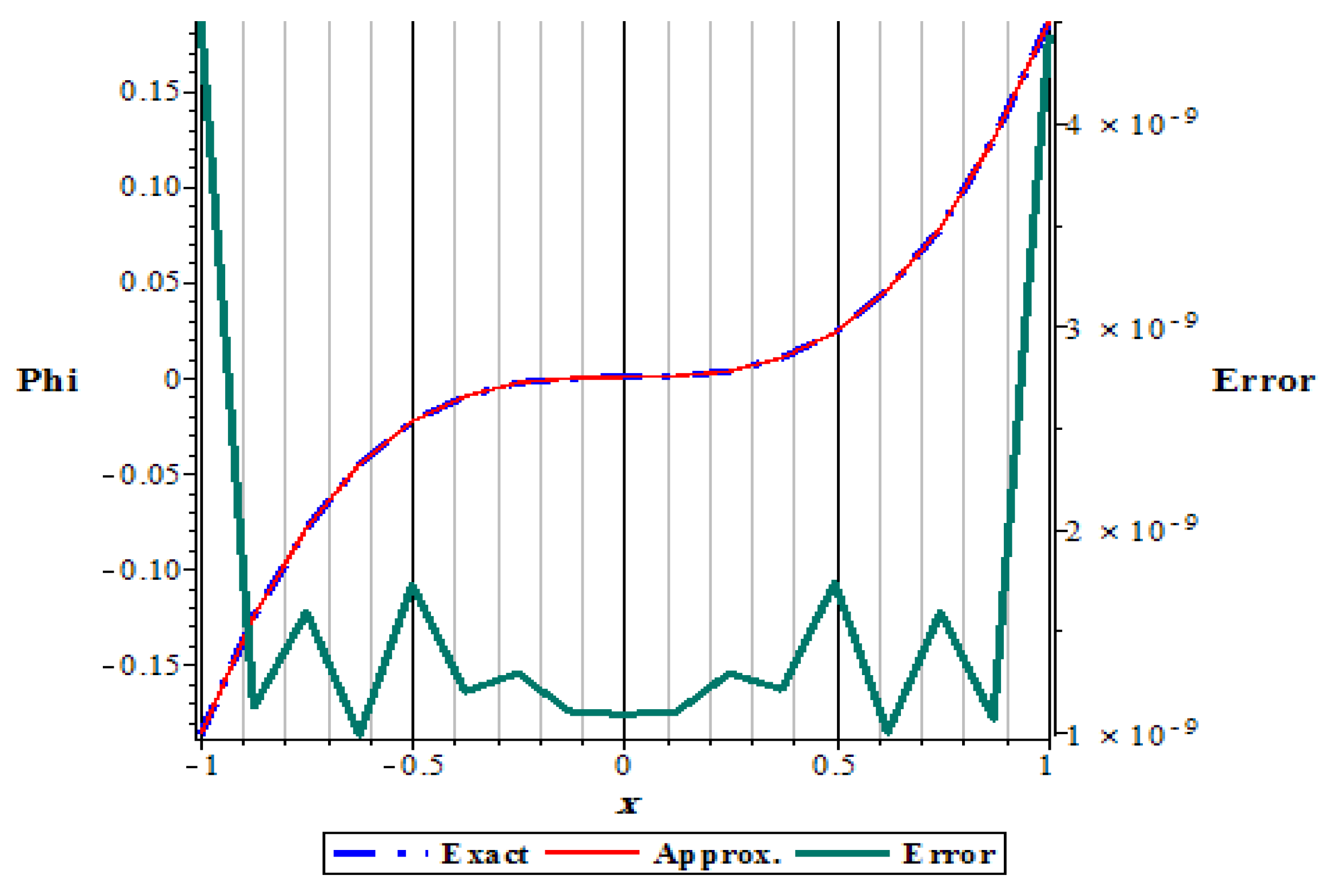
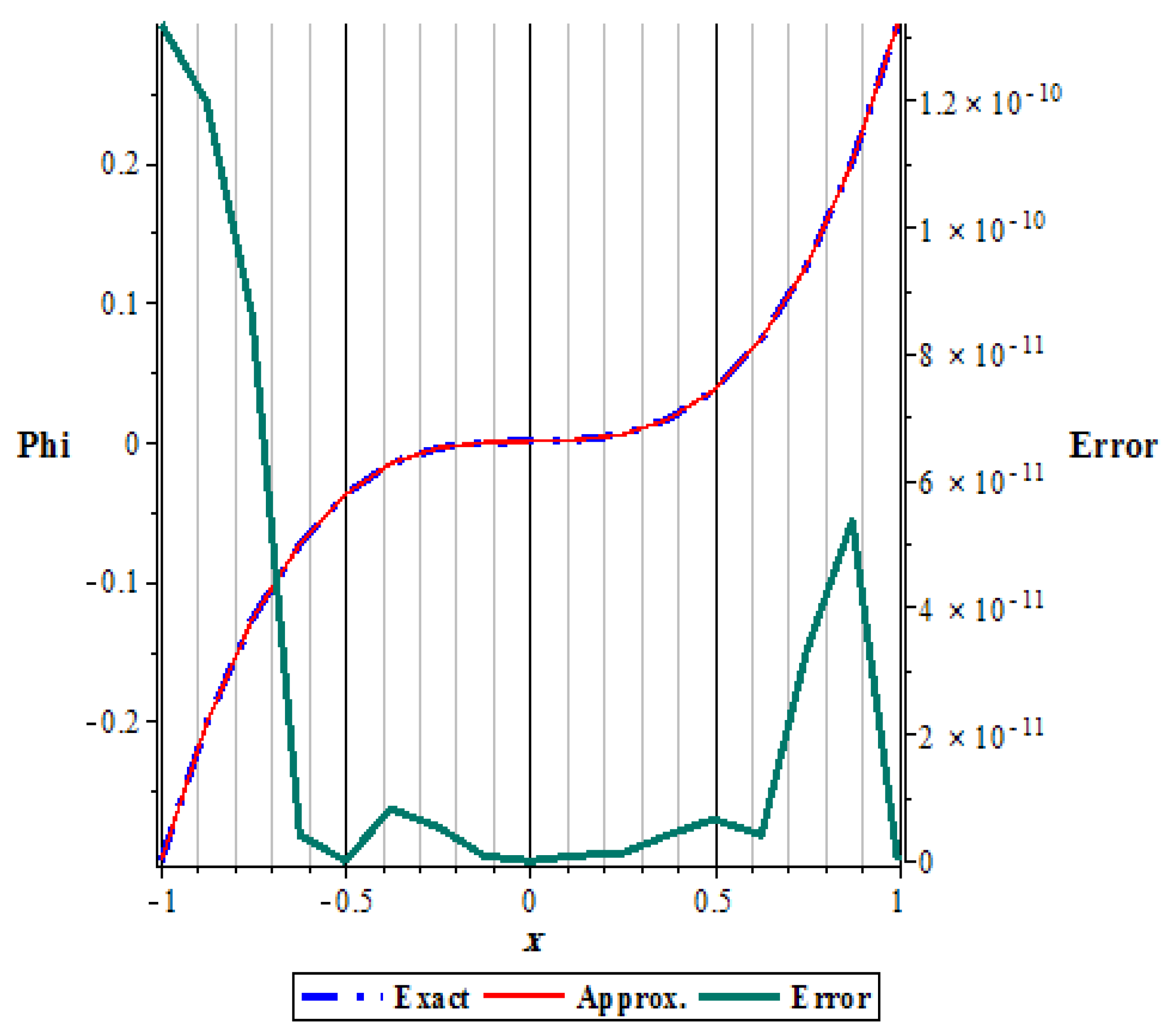
The error is the same to an extreme degree between positive and negative values for
x in the region of integration. We note that the maximum error occurs at the ends of
x values while it takes the minimum in the middle, see
Figure 2.
12. Future Work
We will attempt to solve Equation (1) as a phase-lag problem with a history memory function in the sense of general form of fractional calculus and differ between the three following cases of time: terrestrial (), eternal (), and isthmus lives ().












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}