
Dynamical Transmission and Mathematical Analysis of Ebola Virus Using a Constant Proportional Operator with a Power Law Kernel


Abstract
:1. Introduction
2. The Hybrid Fractional Derivative Operator
Main Definitions
3. Fractional-Order Model of Ebola Epidemic
- People who have not been exposed to the Ebola virus are found in the susceptible compartment .
- People in the exposed compartment are those who are exposed to Ebola virus but show no outward clinical symptoms. As of yet, they cannot spread infection. The incubation phase is the name for this time frame. Exposed people then make their way over to the Infectious section.
- People who have the infection begin to exhibit clinical symptoms and can spread it to others. Authorities place infectious patients under sanitary care after the infectious period, which is the average amount of time a person spends in this compartment, and then classify them as hospitalized.
- Although they are receiving treatment, the patients in the compartment are still contagious. Following their stay in the hospital, patients either heal and move into the Recovered compartment or pass into the Dead compartment . We specifically state that there are no hospitalized patients who are no longer able to spread disease in compartment . They are contained in the compartment described below as “Recovered”.
- People who have died from the disease but have not yet been buried are still contagious to others through touch with their bodies. The body is interred after a predetermined amount of time.
- People who have survived the sickness are in compartment . In this compartment, people naturally become immune to the disease-causing agent and stop being contagious [36].
3.1. Existence and Uniqueness of Solutions
- Firstly, we will prove that is a contraction map. For and ,where . Proceeding this, we findwhere , , , , and .Hence, for the operator ,where is a Lipschitz constant.⟹ is a non-expansive operator.
- Now we will prove that is continuously compact.The absolute modulus of all positively bounded continuous operators , , , , , and specified in (19) is given by the non-zero positive constants , , , , , , , , , , , and , which satisfy the subsequent bounded-ness inequalities. This proves the compactness of .Suppose that is a closed subset of ,For , we findProceeding with this process, we find the maximum norm of aswhere is a positive constant.⇒ is a uniformly bounded operator.Now, we will prove that is equi-continuous for . For this purpose, we haveSince is independent of ,is a completely continuous, equi-continuous operator.is relatively compact by Arzela’s theorem.
3.2. Ulam–Hyres Stability
3.3. Analysis of Equilibrium Points
3.4. Disease Free Equilibrium
3.5. Endemic Equilibrium
3.6. Reproductive Number
- When we apply disease effective contact rates of , , and , we get .
- If we increase these disease effective contact rates to , , and , we obtain .
4. Analysis of the Proposed Model
Eigenfunctions of the CPC Operator
5. Numerical Scheme of Proposed Model
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ivorra, B.; Ngom, D.; Ramos, Á.M. Be-codis: A mathematical model to predict the risk of human diseases spread between countries-validation and application to the 2014–2015 ebola virus disease epidemic. Bull. Math. Biol. 2015, 77, 1668–1704. [Google Scholar] [CrossRef] [PubMed]
- Rachah, A.; Torres, D.F. Mathematical modelling, simulation, and optimal control of the 2014 Ebola outbreak in West Africa. Discrete dynamics in nature and society. Discret. Dyn. Nat. Soc. 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Djiomba, N.; Nyabadza, S.D.F. An optimal control model for Ebola virus disease. J. Biol. Syst. 2016, 24, 29–49. [Google Scholar] [CrossRef]
- Khajanchi, S.; Sarkar, K.; Mondal, J.; Nisar, K.S.; Abdelwahab, S.F. Mathematical modeling of the COVID-19 pandemic with intervention strategies. Results Phys. 2021, 25, 104285. [Google Scholar] [CrossRef] [PubMed]
- Khajanchi, S.; Sarkar, K.; Mondal, J. Dynamics of the COVID-19 pandemic in India. arXiv 2020, arXiv:2005.06286. [Google Scholar]
- Tiwari, P.K.; Rai, R.K.; Khajanchi, S.; Gupta, R.K.; Misra, A.K. Dynamics of coronavirus pandemic: Effects of community awareness and global information campaigns. Eur. Phys. J. Plus 2021, 136, 994. [Google Scholar] [CrossRef]
- Khajanchi, S.; Sarkar, K.; Banerjee, S. Modeling the dynamics of COVID-19 pandemic with implementation of intervention strategies. Eur. Phys. J. Plus 2022, 137, 129. [Google Scholar] [CrossRef]
- Mondal, J.; Khajanchi, S. Mathematical modeling and optimal intervention strategies of the COVID-19 outbreak. Nonlinear Dyn. 2022, 109, 177–202. [Google Scholar] [CrossRef]
- Khajanchi, S.; Bera, S.; Roy, T.K. Mathematical analysis of the global dynamics of a HTLV-I infection model, considering the role of cytotoxic T-lymphocytes. Math. Comput. Simul. 2020, 180, 354–378. [Google Scholar] [CrossRef]
- Bera, S.; Khajanchi, S.; Roy, T.K. Dynamics of an HTLV-I infection model with delayed CTLs immune response. Appl. Math. Comput. 2022, 430, 127206. [Google Scholar] [CrossRef]
- Bhatter, S.; Jangid, K.; Kumawat, S.; Purohit, S.D.; Baleanu, D.; Suthar, D.L. A generalized study of the distribution of buffer over calcium on a fractional dimension. Appl. Math. Sci. Eng. 2023, 31, 2217323. [Google Scholar] [CrossRef]
- Singh, J.P.; Abdeljawad, T.; Baleanu, D.; Kumar, S. Transmission dynamics of a novel fractional model for the Marburg virus and recommended actions. Eur. Phys. J. Spec. Top. 2023, 1–11. [Google Scholar] [CrossRef]
- Xu, C.; Mu, D.; Liu, Z.; Pang, Y.; Aouiti, C.; Tunc, O.; Ahmad, S.; Zeb, A. Bifurcation dynamics and control mechanism of a fractional-order delayed Brusselator chemical reaction model. Match-Commun. Math. Comput. Chem. 2023, 89, 73–106. [Google Scholar] [CrossRef]
- Farman, M.; Akgül, A.; Abdeljawad, T.; Naik, P.A.; Bukhari, N.; Ahmad, A. Modeling and analysis of fractional order Ebola virus model with Mittag-Leffler kernel. Alex. Eng. J. 2022, 61, 2062–2073. [Google Scholar] [CrossRef]
- Zhang, L.; Addai, E.; Ackora-Prah, J.; Arthur, Y.D.; Asamoah, J.K.K. Fractional-order Ebola-Malaria coinfection model with a focus on detection and treatment rate. Comput. Math. Methods Med. 2022, 2022, 1–19. [Google Scholar] [CrossRef]
- Khan, F.M.; Ali, A.; Bonyah, E.; Khan, Z.U. The mathematical analysis of the new fractional order Ebola model. J. Nanomater. 2022, 2022, 1–12. [Google Scholar] [CrossRef]
- Shah, N.H.; Chaudhary, K. Analysis of the Ebola with a fractional-order model involving the Caputo-Fabrizio derivative. Songklanakarin J. Sci. Technol. 2023, 45, 69–79. [Google Scholar]
- Tosin, A.S.; Yemisi, O.; Olarenwaju, I.M.; Bala, A. Approximate Solution of a Fractional-Order Ebola Virus Disease Model with Contact Tracing and Quarantine. Appl. Math. Comput. Intell. 2023, 12, 30–42. [Google Scholar]
- Ndenda, J.P.; Njagarah, J.B.H.; Shaw, S. Influence of environmental viral load, interpersonal contact and infected rodents on Lassa fever transmission dynamics: Perspectives from fractional-order dynamic modelling. AIMS Math. 2022, 7, 8975–9002. [Google Scholar] [CrossRef]
- Yavuz, M.; Özköse, F.; Susam, M.; Kalidass, M. A new modeling of fractional-order and sensitivity analysis for hepatitis-b disease with real data. Fractal Fract. 2023, 7, 165. [Google Scholar] [CrossRef]
- Chu, Y.M.; Zarin, R.; Khan, A.; Murtaza, S. A vigorous study of fractional order mathematical model for SARS-CoV-2 epidemic with Mittag-Leffler kernel. Alex. Eng. J. 2023, 71, 565–579. [Google Scholar] [CrossRef]
- Kulakov, M.; Frisman, E. Clustering Synchronization in a Model of the 2D Spatio-Temporal Dynamics of an Age-Structured Population with Long-Range Interactions. Mathematics 2023, 11, 2072. [Google Scholar] [CrossRef]
- Farman, M.; Alfiniyah, C.; Shehzad, A. Modelling and analysis tuberculosis (TB) model with hybrid fractional operator. Alex. Eng. J. 2023, 72, 463–478. [Google Scholar] [CrossRef]
- Taneja, K.; Deswal, K.; Kumar, D.; Baleanu, D. Novel Numerical Approach for Time Fractional Equations with Nonlocal Condition. Numer. Algorithms 2023, 138, 1–21. [Google Scholar] [CrossRef]
- Farman, M.; Baleanu, D. Modeling and Analysis of Smokers Model with Constant Proportional Fractional Operators. In Proceedings of the 2023 International Conference on Fractional Differentiation and Its Applications (ICFDA), Ajman, United Arab Emirates, 14–16 March 2023; IEEE: New York, NY, USA, 2023; pp. 1–7. [Google Scholar]
- Farman, M.; Shehzad, A.; Akgül, A.; Baleanu, D.; Sen, M.D.L. Modelling and analysis of a measles epidemic model with the constant proportional Caputo operator. Symmetry 2023, 15, 468. [Google Scholar] [CrossRef]
- Ali, A.D.; Erturk, V.S.; Zeb, A.R.; Khan, R.A. Numerical solution of fractional order immunology and aids model via Laplace transform Adomian decomposition method. J. Fract. Calcul. Appl. 2019, 10, 242–252. [Google Scholar]
- Baleanu, D.; Aydogn, S.M.; Mohammadi, H.; Rezapour, S. On modelling of epidemic childhood diseases with the Caputo-Fabrizio derivative by using the Laplace Adomian decomposition method. Alex. Eng. J. 2020, 59, 3029–3039. [Google Scholar] [CrossRef]
- Sweilam, N.; Al-Mekhlafi, S.; Baleanu, D. A hybrid fractional optimal control for a novel Coronavirus (2019-nCov) mathematical model. J. Adv. Res. 2020, 32, 149–160. [Google Scholar] [CrossRef]
- Caputo, M. Linear models of dissipation whose Q is almost frequency independent—II. Geophys. J. Int. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods; World Scientific: Singapore, 2012; Volume 3. [Google Scholar]
- Anderson, D.R.; Ulness, D.J. Newly defined conformable derivatives. Adv. Dyn. Syst. Appl. 2015, 10, 109–137. [Google Scholar]
- Baleanu, D.; Fernandez, A.; Akgül, A. On a fractional operator combining proportional and classical differintegrals. Mathematics 2020, 8, 360. [Google Scholar] [CrossRef]
- Ahmed, I.; Kumam, P.; Jarad, F.; Borisut, P.; Jirakitpuwapat, W. On Hilfer generalized proportional fractional derivative. Adv. Differ. Equations 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Jarad, F.; Abdeljawad, T.; Alzabut, J. Generalized fractional derivatives generated by a class of local proportional derivatives. Eur. Phys. J. Spec. Top. 2017, 226, 3457–3471. [Google Scholar] [CrossRef]
- Seck, R.; Ngom, D.; Ivorra, B.; Ramos, Á.M. An optimal control model to design strategies for reducing the spread of the Ebola virus disease. Math. Biosci. Eng. 2021, 19, 1746–1774. [Google Scholar] [CrossRef]
- Driessche, P.v.D.; Watmough, J. Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of people being recruited in S at a given time | |
| The mortality rate | |
| The disease effective contact rate in | |
| The disease effective contact rate in | |
| The disease effective contact rate in | |
| The transition rates from to | |
| The transition rates from to | |
| The illness fatality rate multiplied by the pace at which became | |
| The illness survival rate multiplied by the rate of change from to | |
| The rate of Ebola victims buried | |
| The percentage of persons moving daily between the states of , , and travelling abroad |
| Value for [36] | Value for (Estimated) | |
|---|---|---|
| 0.0217 | 0.0217 | |
| 0.021 | 0.021 | |
| 0.2500 | 0.3 | |
| 0.0195 | 0.05 | |
| 0.2400 | 0.3 | |
| 0.022 | 0.022 | |
| 0.15 | 0.15 | |
| 0.1177 | 0.1177 | |
| 0.1040 | 0.1040 | |
| 0.7500 | 0.7500 | |
| 0.0000024 | 0.0000024 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
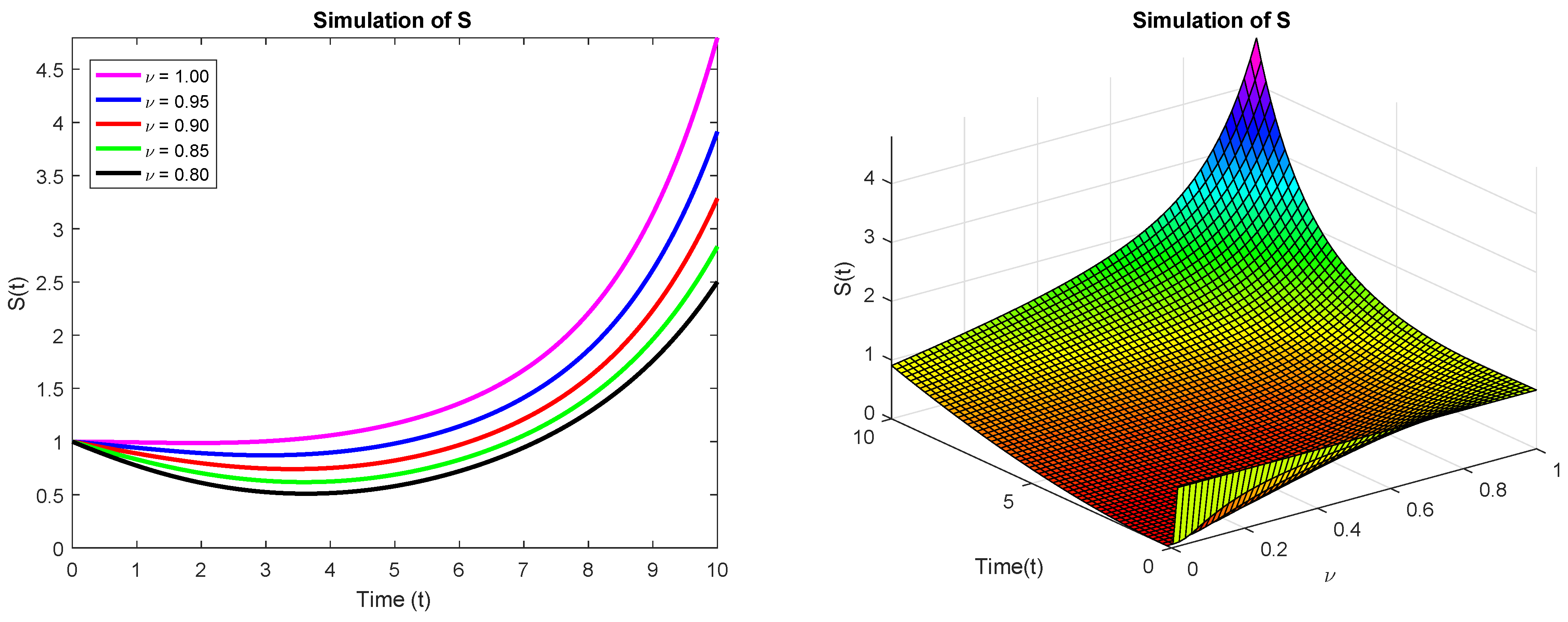
| 0 | 0.999 | 0.999 | 0.999 | 0.999 | 0.999 |
| 1 | 0.9922 | 0.9413 | 0.8878 | 0.8318 | 0.7730 |
| 2 | 0.9865 | 0.8911 | 0.7964 | 0.7029 | 0.6115 |
| 3 | 1.0030 | 0.8706 | 0.7463 | 0.6307 | 0.5250 |
| 4 | 1.0580 | 0.8964 | 0.7517 | 0.6246 | 0.5154 |
| 5 | 1.1690 | 0.9818 | 0.8221 | 0.6890 | 0.5812 |
| 6 | 1.3580 | 1.1430 | 0.9680 | 0.8290 | 0.7217 |
| 7 | 1.6730 | 1.4130 | 1.2120 | 1.0580 | 0.9444 |
| 8 | 2.2060 | 1.8600 | 1.6010 | 1.4120 | 1.2730 |
| 9 | 3.1410 | 2.6150 | 2.2350 | 1.9600 | 1.7600 |
| 10 | 4.7950 | 3.9130 | 3.2850 | 2.8320 | 2.5000 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
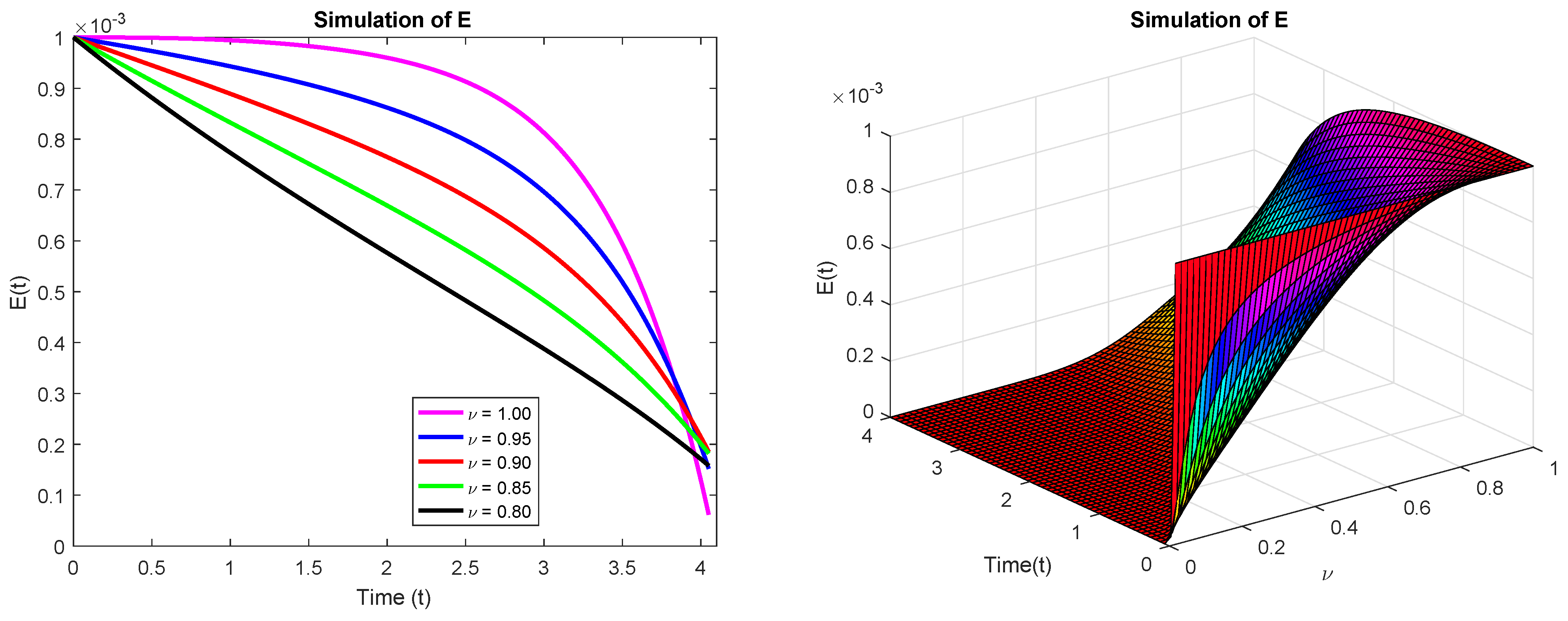
| 0.0 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| 0.5 | 0.0009992 | 0.0009732 | 0.0009451 | 0.0008108 | 0.0007634 |
| 1.0 | 0.0009945 | 0.0009431 | 0.0008892 | 0.0006016 | 0.0005351 |
| 1.5 | 0.0009830 | 0.0009073 | 0.0008301 | 0.0003935 | 0.0003332 |
| 2.0 | 0.0009600 | 0.0008619 | 0.0007648 | 0.0001985 | 0.0001643 |
| 2.5 | 0.0009132 | 0.0007890 | 0.0006872 | 0.0005818 | 0.0004827 |
| 3.0 | 0.0008125 | 0.0006962 | 0.0005858 | 0.0004826 | 0.0003877 |
| 3.5 | 0.0005935 | 0.0005188 | 0.0004401 | 0.0003614 | 0.0002865 |
| 4.0 | 0.0001293 | 0.0001964 | 0.0002143 | 0.0002011 | 0.0001709 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
| 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
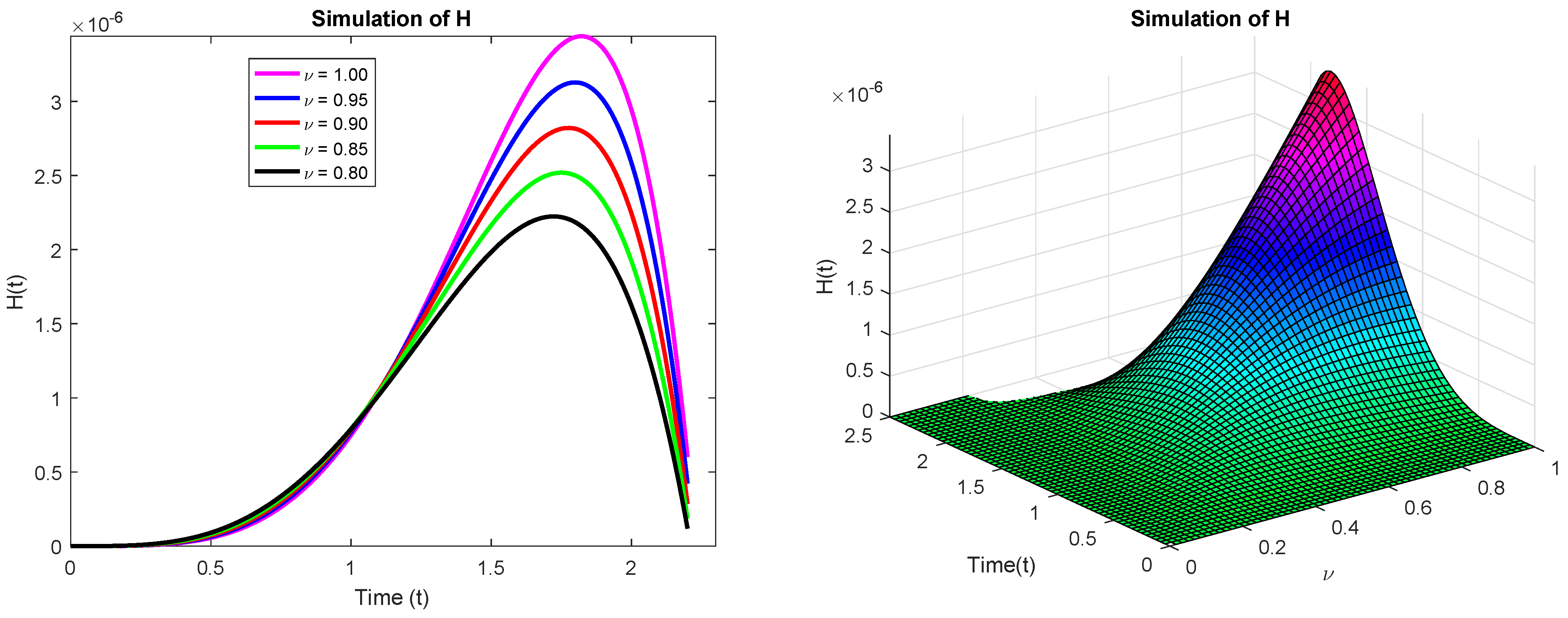
| 0.5 | 4.478 | 4.798 | 5.122 | 5.444 | 5.758 |
| 1.0 | 3.370 | 3.392 | 3.390 | 3.363 | 3.306 |
| 1.5 | 1.035 | 9.927 | 9.434 | 8.867 | 8.227 |
| 2.0 | 2.133 | 1.966 | 1.790 | 1.607 | 1.418 |
| 2.5 | 3.326 | 2.98 | 2.629 | 2.276 | 1.928 |
| 3.0 | 3.694 | 3.348 | 2.954 | 2.533 | 1.105 |
| 3.5 | 1.074 | 1.655 | 1.871 | 1.835 | 1.639 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
| 0.00 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.25 | 3.616 | 4.484 | 5.541 | 6.819 | 8.356 |
| 0.50 | 5.565 | 6.337 | 7.177 | 8.082 | 9.042 |
| 0.75 | 2.631 | 2.829 | 3.022 | 3.203 | 3.366 |
| 1.00 | 7.491 | 7.695 | 7.839 | 7.912 | 7.900 |
| 1.25 | 1.570 | 1.550 | 1.515 | 1.465 | 1.399 |
| 1.50 | 2.600 | 2.474 | 2.329 | 2.165 | 1.984 |
| 1.75 | 3.882 | 3.104 | 2.815 | 2.519 | 2.219 |
| 2.00 | 2.943 | 2.585 | 2.244 | 1.922 | 1.621 |
| 2.20 | 6.019 | 4.226 | 2.855 | 1.859 | 1.183 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
| 0.00 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.25 | 1.032 | 1.435 | 1.986 | 2.736 | 3.748 |
| 0.50 | 6.303 | 7.770 | 9.518 | 1.158 | 1.398 |
| 0.75 | 6.609 | 7.534 | 8.521 | 9.552 | 1.060 |
| 1.00 | 3.265 | 3.500 | 3.717 | 3.906 | 4.056 |
| 1.25 | 1.026 | 1.043 | 1.049 | 1.042 | 1.021 |
| 1.50 | 2.260 | 2.187 | 2.090 | 1.970 | 1.828 |
| 1.75 | 3.309 | 3.087 | 2.732 | 2.429 | 2.122 |
| 2.00 | 1.224 | 8.693 | 5.701 | 3.288 | 1.449 |
| Time (Days) | Fractional Order | ||||
|---|---|---|---|---|---|
| 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.2 | 3.074 | 4.426 | 6.343 | 9.046 | 1.283 |
| 0.4 | 1.823 | 2.325 | 2.947 | 3.708 | 4.632 |
| 0.6 | 1.803 | 2.120 | 2.471 | 2.856 | 3.267 |
| 0.8 | 7.982 | 8.749 | 9.487 | 1.017 | 1.075 |
| 1.0 | 1.991 | 2.017 | 2.011 | 1.968 | 1.885 |
| 1.2 | 2.095 | 1.704 | 1.254 | 7.563 | 2.283 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Farman, M. Dynamical Transmission and Mathematical Analysis of Ebola Virus Using a Constant Proportional Operator with a Power Law Kernel. Fractal Fract. 2023, 7, 706. https://doi.org/10.3390/fractalfract7100706
Xu C, Farman M. Dynamical Transmission and Mathematical Analysis of Ebola Virus Using a Constant Proportional Operator with a Power Law Kernel. Fractal and Fractional. 2023; 7(10):706. https://doi.org/10.3390/fractalfract7100706
Chicago/Turabian StyleXu, Changjin, and Muhammad Farman. 2023. "Dynamical Transmission and Mathematical Analysis of Ebola Virus Using a Constant Proportional Operator with a Power Law Kernel" Fractal and Fractional 7, no. 10: 706. https://doi.org/10.3390/fractalfract7100706
APA StyleXu, C., & Farman, M. (2023). Dynamical Transmission and Mathematical Analysis of Ebola Virus Using a Constant Proportional Operator with a Power Law Kernel. Fractal and Fractional, 7(10), 706. https://doi.org/10.3390/fractalfract7100706