
Stationary Response of a Kind of Nonlinear Stochastic Systems with Variable Mass and Fractional Derivative Damping



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Fractional Derivative
2.2. Problem Statement
3. Approximately Equivalent System
3.1. Approximately Equivalent Equation of the Fractional Derivative Damping
3.2. Approximately Equivalent Equation of the Nonlinear Stochastic System
4. Stochastic Averaging of a Nonlinear Stochastic System with Variable Mass and Fractional Derivative Damping
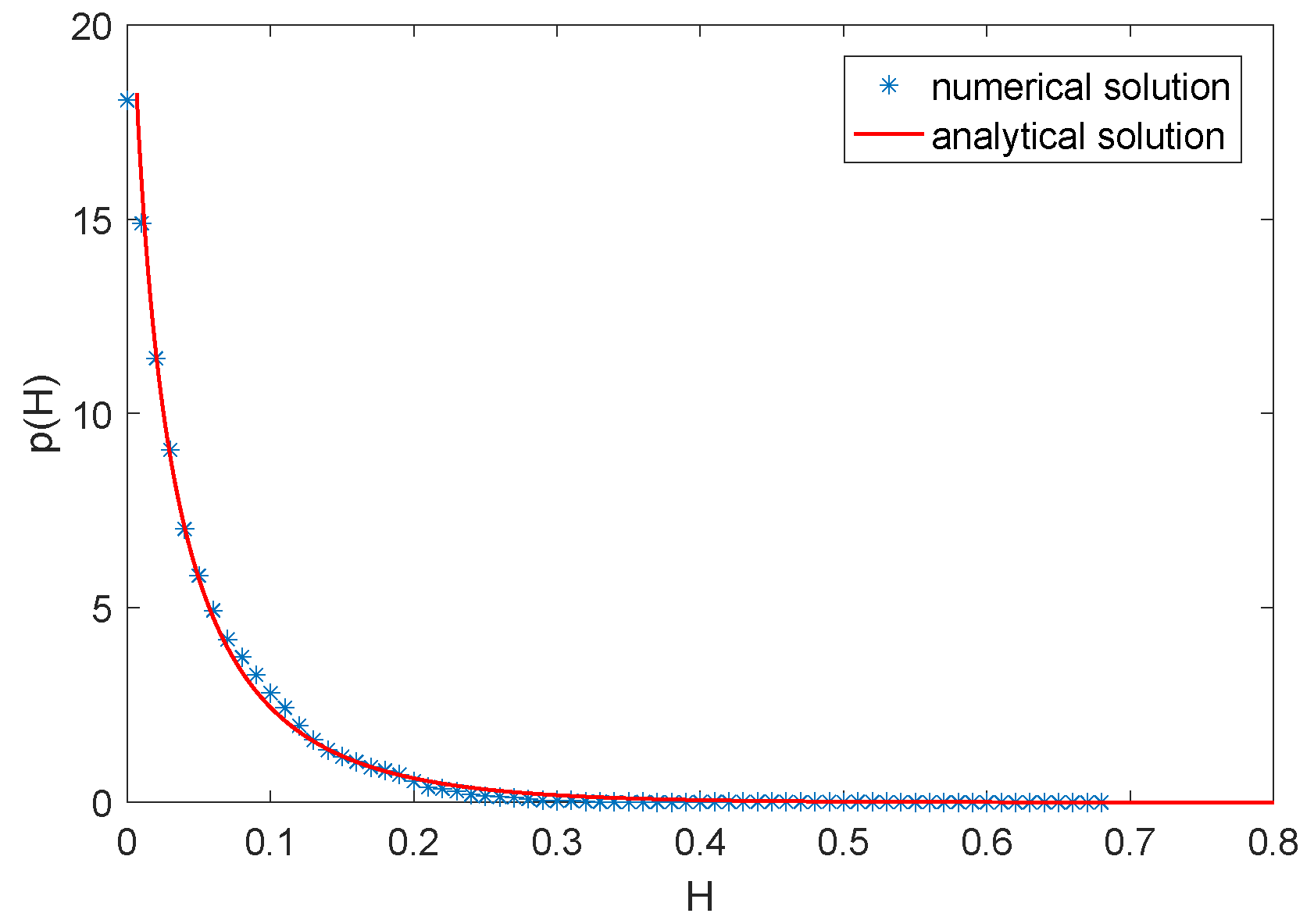
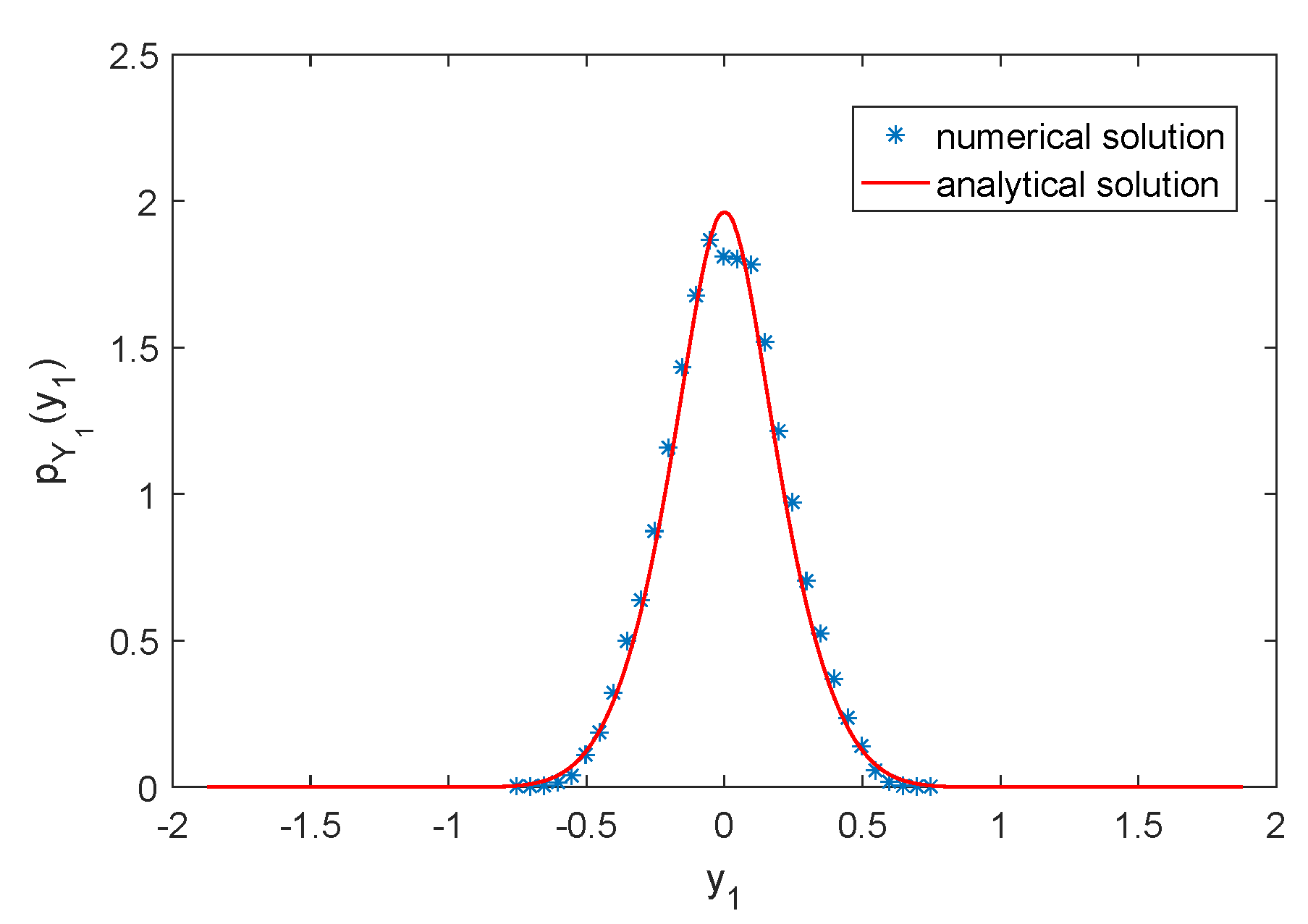
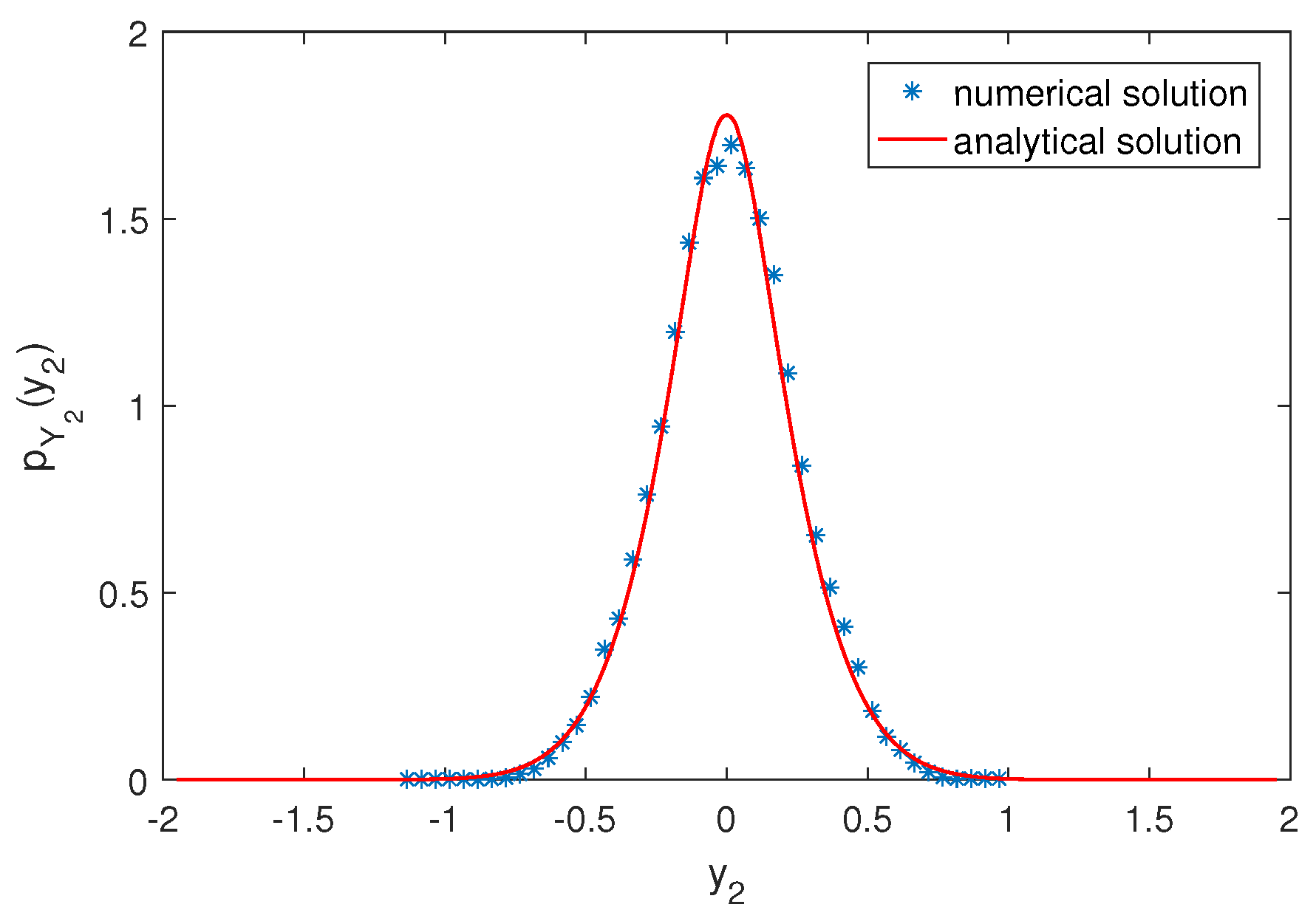
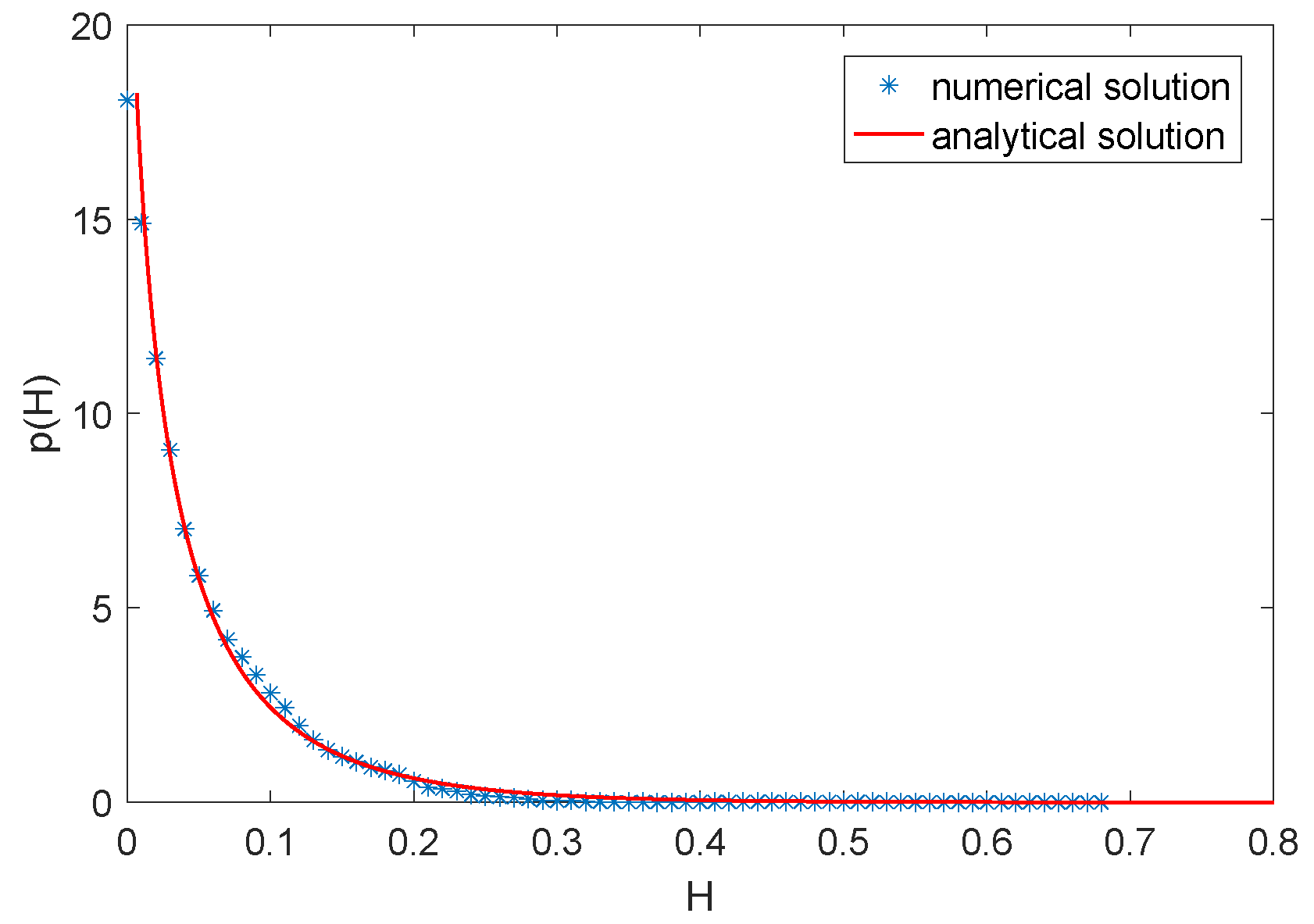
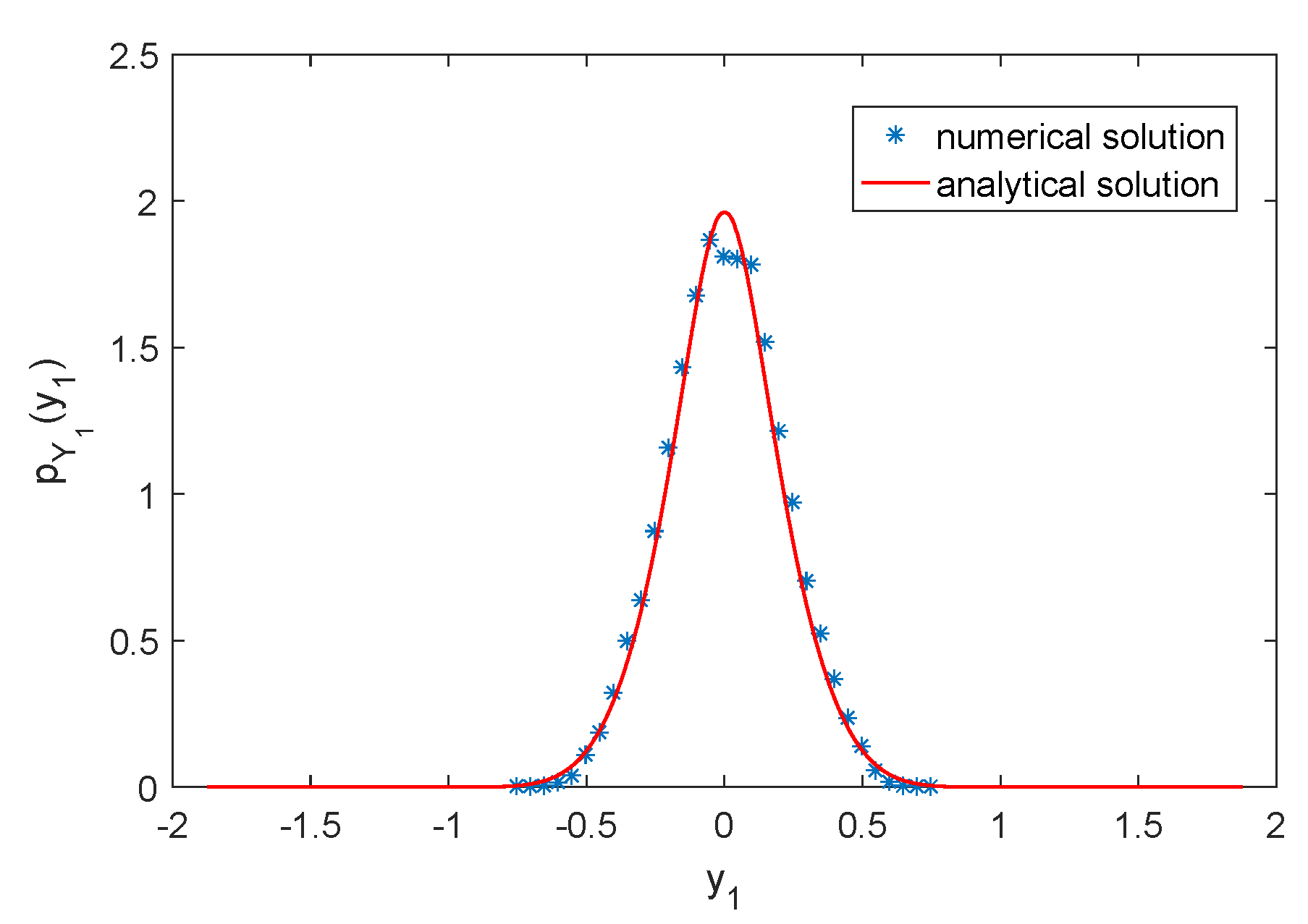
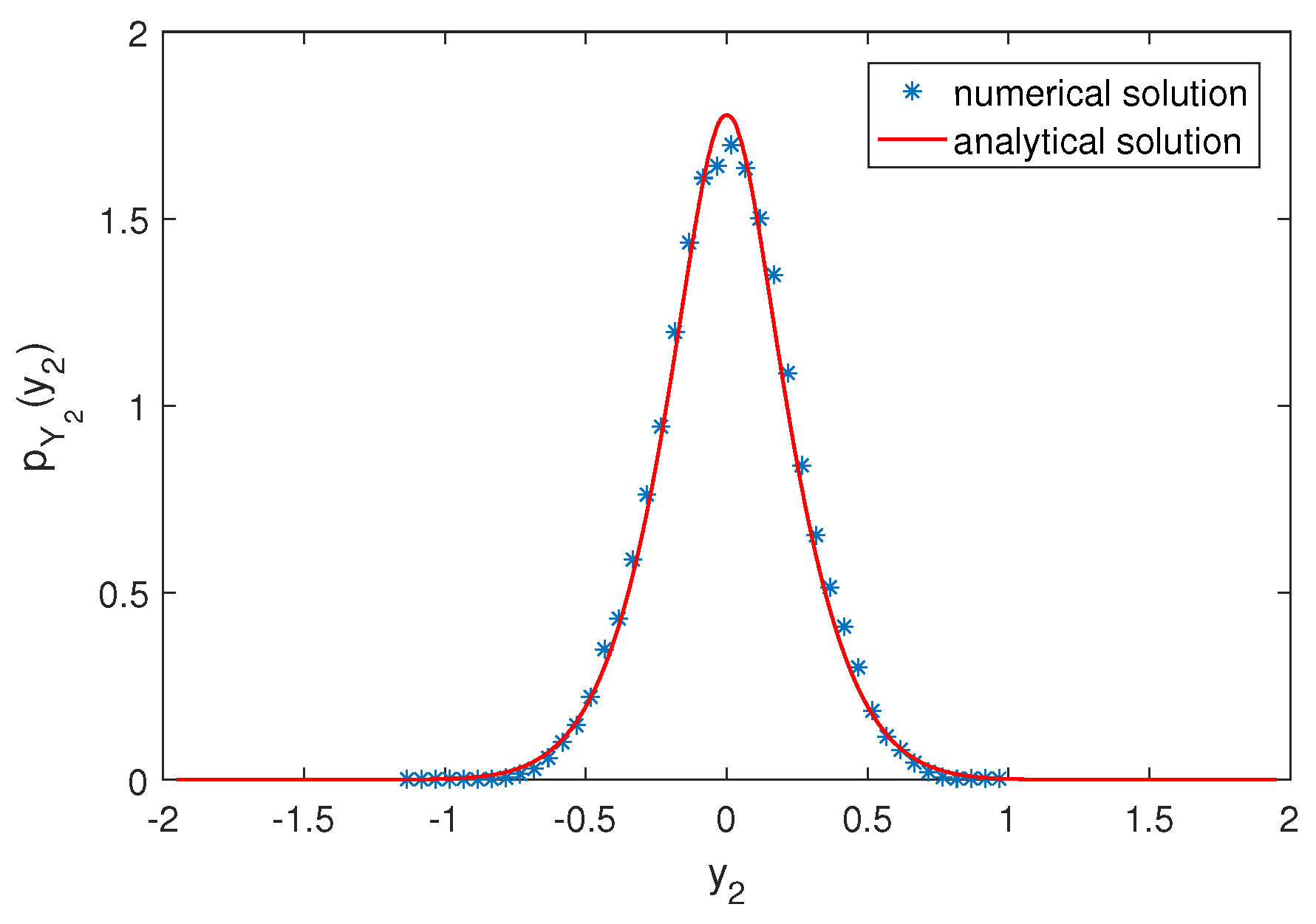
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Drăgănescu, G.; Bereteu, L.; Ercuţa, A.; Luca, G. Anharmonic vibrations of a nano-sized oscillator with fractional damping. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 922–926. [Google Scholar]
- Liu, W.; Karpov, E.; Zhang, S.; Park, H. An introduction to computational nanomechanics and materials. Comput. Methods Appl. Mech. Eng. 2004, 193, 1529–1578. [Google Scholar]
- Drăgănescu, G. Application of a variational iteration method to linear and nonlinear viscoelastic models with fractional derivatives. J. Math. Phys. 2006, 47, 082902. [Google Scholar]
- Yang, Y.; Xu, W. Stochastic analysis of monostable vibration energy harvesters with fractional derivative damping under gaussian white noise excitation. Nonlinear Dyn. 2018, 94, 639–648. [Google Scholar]
- Niu, J.; Liu, R.; Shen, Y.; Yang, S. Stability and bifurcation analysis of single-degree-of-freedom linear vibro-impact system with fractional-order derivative. Chaos Solitons Fractals 2019, 123, 14–23. [Google Scholar]
- Yang, Y.; Xu, W.; Gu, X.; Sun, Y. Stochastic response of a class of self-excited systems with Caputo-type fractional derivative driven by Gaussian white noise. Chaos Solitons Fractals 2015, 77, 190–204. [Google Scholar]
- Yang, Y.; Xu, W.; Chen, Y.; Zhou, B. Bifurcation analysis of a vibro-impact viscoelastic oscillator with fractional derivative element. Int. J. Bifurc. Chaos 2018, 28, 1850170. [Google Scholar]
- Lopez, G. Constant of motion, lagrangian and hamiltonian of the gravitational attraction of two bodies with variable mass. Int. J. Theor. Phys. 2005, 46, 806–816. [Google Scholar]
- Cveticanin, L. Oscillator with non-integer order nonlinearity and time variable parameters. Acta Mech. 2012, 223, 1417–1429. [Google Scholar]
- Boisen, A.; Dohn, S.; Keller, S.S.; Schmid, S.; Tenje, M. Cantilever-like micromechanical sensors. Rep. Prog. Phys. 2011, 74, 036101. [Google Scholar]
- Gitterman, M. Stochastic oscillator with random mass: New type of Brownian motion. Phys. A Stat. Mech. Its Appl. 2014, 395, 11–21. [Google Scholar]
- Fukuma, T.; Kimura, M.; Kobayashi, K.; Matsushige, K.; Yamada, H. Development of low noise cantilever deflection sensor for multienvironment frequency-modulation atomic force microscopy. Rev. Sci. Instrum. 2005, 76, 053704. [Google Scholar]
- Mankin, R.; Laas, K.; Laas, T.; Reiter, E. Stochastic multiresonance and correlation-time-controlled stability for a harmonic oscillator with fluctuating frequency. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2008, 78, 031120. [Google Scholar]
- Gitterman, M.; Shapiro, I. Stochastic resonance in a harmonic oscillator with random mass subject to asymmetric dichotomous noise. J. Stat. Phys. 2011, 144, 139–149. [Google Scholar]
- Gitterman, M. Oscillator with random trichotomous mass. Phys. A Stat. Mech. Its Appl. 2012, 391, 5343–5348. [Google Scholar]
- Zhong, S.; Wei, K.; Gao, S.; Ma, H. Trichotomous noise induced resonance behavior for a fractional oscillator with random mass. J. Stat. Phys. 2015, 159, 195–209. [Google Scholar]
- Guo, F.; Zhu, C.; Cheng, X.; Li, H. Stochastic resonance in a fractional harmonic oscillator subject to random mass and signal-modulated noise. Phys. A Stat. Mech. Its Appl. 2016, 459, 86–91. [Google Scholar]
- Wang, Y.; Jin, X.; Huang, Z. Stochastic Averaging for Quasi-Integrable Hamiltonian Systems with Variable Mass. J. Appl. Mech. 2013, 81, 051003. [Google Scholar]
- Qiao, Y.; Xu, W.; Jia, W.; Liu, W. Stochastic stability of variable-mass duffing oscillator with mass disturbance modeled as Gaussian white noise. Nonlinear Dyn. 2017, 89, 607–616. [Google Scholar]
- Qiao, Y.; Xu, W.; Jia, W.; Han, Q. Stochastic stationary response of a variable-mass system with mass disturbance described by Poisson white noise. Phys. A Stat. Mech. Its Appl. 2017, 473, 122–134. [Google Scholar]
- Li, C. Stochastic response of a vibro-impact system with variable mass. Phys. A Stat. Mech. Its Appl. 2019, 516, 151–160. [Google Scholar]
- Liu, L.; Wang, J.; Zhang, L.; Zhang, S. Multi-AUV Dynamic Maneuver Countermeasure Algorithm Based on Interval Information Game and Fractional-Order DE. Fractal Fract. 2022, 6, 235. [Google Scholar]
- Liu, L.; Zhang, S.; Zhang, L.; Pan, G.; Bai, C. Multi-AUV dynamic maneuver decision-making based on intuitionistic fuzzy counter-game and fractional-order particle swarm optimization. Fractals 2021, 29, 2140039. [Google Scholar]
- Hobiny, A.; Alzahrani, F.; Abbas, I.; Marin, M. The effect of fractional time derivative of bioheat model in skin tissue induced to laser irradiation. Symmetry 2020, 12, 602. [Google Scholar]
- Alotaibi, M.; Abo-Dahab, S.; Abdlrahim, H.; Kilany, A. Fractional calculus of thermoelastic p-waves reflection under influence of gravity and electromagnetic fields. Fractals 2020, 28, 2040037. [Google Scholar]
- Abdel-Salam, E.; Mourad, M. Fractional quasi AKNS-technique for nonlinear space-time fractional evolution equations. Math. Methods Appl. Sci. 2019, 42, 5953–5968. [Google Scholar] [CrossRef]
- Al-Refai, M.; Abdeljawad, T. Fundamental results of conformable Sturm-Liouville eigenvalue problems. Complexity 2017, 2017, 3720471. [Google Scholar]
- Liu, L.; Zhang, L.; Pan, G.; Zhang, S. Robust yaw control of autonomous underwater vehicle based on fractional-order PID controller. Ocean. Eng. 2022, 257, 111493. [Google Scholar]
- Zhang, S.; Liu, L.; Xue, D. Nyquist-based stability analysis of non-commensurate fractional-order delay systems. Appl. Math. Comput. 2020, 377, 125111. [Google Scholar]
- Zhang, S.; Liu, L.; Xue, D.; Chen, Y. Stability and resonance analysis of a general non-commensurate elementary fractional-order system. Fract. Calc. Appl. Anal. 2020, 23, 183–210. [Google Scholar]
- Hristova, S.; Tersian, S.; Terzieva, R. Lipschitz stability in time for Riemann–Liouville fractional differential equations. Fractal Fract. 2021, 5, 37. [Google Scholar]
- Machado, J. The bouncing ball and the Grünwald-Letnikov definition of fractional derivative. Fract. Calc. Appl. Anal. 2021, 24, 1003–1014. [Google Scholar]
- Hristova, S.; Ivanova, K. Caputo fractional differential equations with non-instantaneous random erlang distributed impulses. Fractal Fract. 2019, 3, 28. [Google Scholar]
- Khasminski, R. On the avaraging principle for ito stochastic differential equations. Kybernetika 1968, 4, 260–279. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Liu, L.; Wang, C. Stationary Response of a Kind of Nonlinear Stochastic Systems with Variable Mass and Fractional Derivative Damping. Fractal Fract. 2022, 6, 342. https://doi.org/10.3390/fractalfract6060342
Zhang S, Liu L, Wang C. Stationary Response of a Kind of Nonlinear Stochastic Systems with Variable Mass and Fractional Derivative Damping. Fractal and Fractional. 2022; 6(6):342. https://doi.org/10.3390/fractalfract6060342
Chicago/Turabian StyleZhang, Shuo, Lu Liu, and Chunhua Wang. 2022. "Stationary Response of a Kind of Nonlinear Stochastic Systems with Variable Mass and Fractional Derivative Damping" Fractal and Fractional 6, no. 6: 342. https://doi.org/10.3390/fractalfract6060342
APA StyleZhang, S., Liu, L., & Wang, C. (2022). Stationary Response of a Kind of Nonlinear Stochastic Systems with Variable Mass and Fractional Derivative Damping. Fractal and Fractional, 6(6), 342. https://doi.org/10.3390/fractalfract6060342