
Spiking Neural Networks for Computational Intelligence: An Overview



{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamentals of a Spiking Neuron
2.1. Leaky Integrate-and-Fire Neuron
2.2. Izhikevich Neuron Model
3. Architectures of Spiking Neural Networks
4. Learning in Spiking Neural Networks
4.1. Unsupervised Learning
4.2. Supervized Learning
4.2.1. Gradient-Based Learning
4.2.2. Bio-Inspired Learning
4.2.3. Other Learning Algorithms
4.3. Reinforcement Learning
5. Generic Applications of SNN in Computational Intelligence
6. SNNs on Neuromorphic Chips
7. Future Trends: Brain-Inspired SNN Architectures
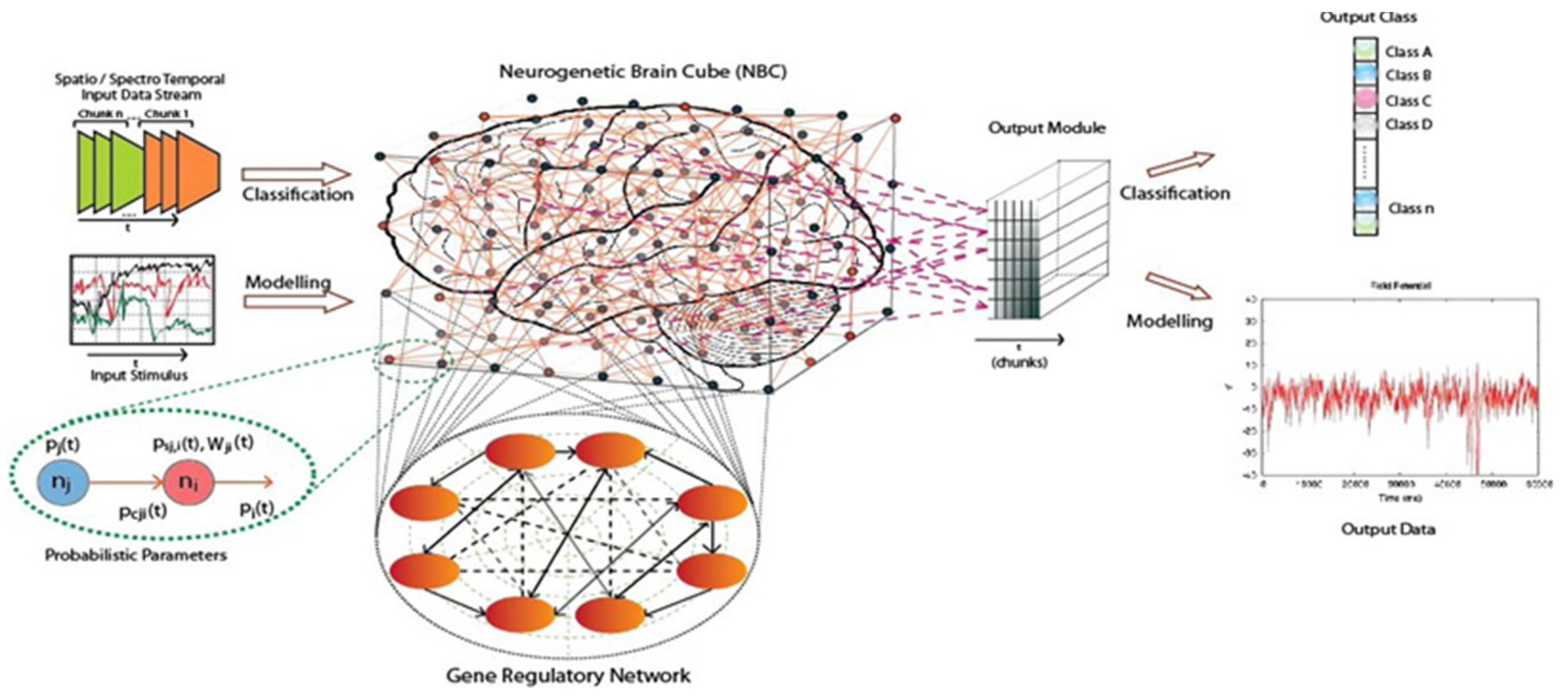
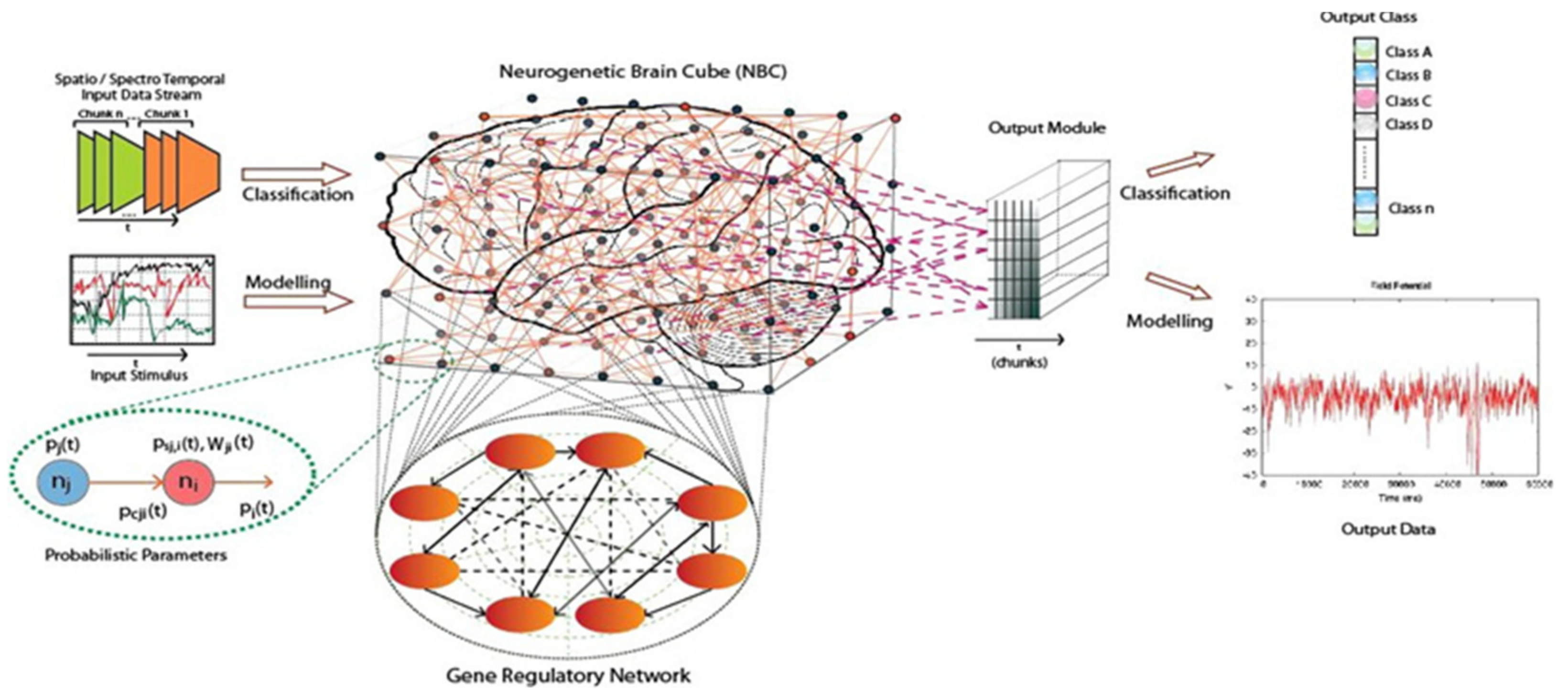
7.1. The NeuCube Architecture
- -
- Input information encoding module;
- -
- 3D SNN reservoir/cube module (SNNc), or also neurogenetic brain cube (NBC), for unsupervised learning;
- -
- Output classification/regression module for supervised learning;
- -
- Gene regulatory network module (optional).
- -
- Short-term memory, represented as changes of the membrane potential level and temporary changes of synaptic efficacy;
- -
- Long-term memory, represented as a stable establishment of synaptic efficacy—LTP and LTD;
- -
- Genetic memory, represented as a genetic code.
- -
- Predicting brain re-wiring through mindfulness [63];
- -
- Modelling neuroimaging data such as EEG and fMRI [62];
- -
- Personalized brain data modelling [64];
- -
- Emotion recognition [65];
- -
- Speech, sound and music recognition [66];
- -
- Moving object recognition [67];
- -
- Prediction of events from temporal climate data (stroke) [64];
- -
- Brain–computer interfaces (BCI) [68].
7.2. Integration of Multimodal Data in a BI-SNN Architectures
- -
- Integrating time, space and orientation data, such as fMRI and DTI [66,69]: An extension of the STDP learning rule was proposed in [69], called oiSTDP, where if two or more postsynaptic neurons spike after a pre-synaptic neuron, the closer a postsynaptic neuron is to the orientation vector, the higher the increase is in the connection weight of that postsynaptic neuron. The proposed rules are utilized for integrating MRI and DTI data to create a personalized model for predicting the response of schizophrenic patient to clozapine. Based on the proposed approach, it has been shown that higher prediction accuracy is achieved using the integrated data;
- -
- -
- Integrating genetic data into a neurogenetic SNN architecture [70]: In [70], a gene interaction network model was suggested as part of a spiking neuron model based on the neuroreceptors AMPAR and NMDAR. For a given problem, such as modelling AD, genes can be connected to these neuroreceptors in a gene regulatory network, thereby influencing the performance of the SNN as a whole.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, Z.; Rubin, D.D.B.-D.; Chen, Y.; He, L.; Chen, T.; Zhang, L.; Wu, C.; Temam, O. Neuromorphic accelerators. In Proceedings of the 48th International Symposium on Microarchitecture, Waikiki, HI, USA, 5–9 December 2015; pp. 494–507. [Google Scholar]
- Deng, L.; Wu, Y.; Hu, X.; Liang, L.; Ding, Y.; Li, G.; Zhao, G.; Li, P.; Xie, Y. Rethinking the performance comparison between SNNS and ANNS. Neural Netw. 2020, 121, 294–307. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Kim, C.; Lee, S.; Baek, E.; Kim, J. An accurate and fair evaluation methodology for SNN-based inferencing with full-stack hardware design space explorations. Neurocomputing 2021, 455, 125–138. [Google Scholar] [CrossRef]
- Hodgkin, A.L.; Huxley, A.F. A quantitative description of membrane current and its application to conduction and excitation in nerve. J. Physiol. 1952, 117, 500–544. [Google Scholar] [CrossRef] [PubMed]
- Abbott, L.F. Lapicque’s introduction of the integrate-and-fire model neuron (1907). Brain Res. Bull. 1999, 50, 303–304. [Google Scholar] [CrossRef]
- Izhikevich, E. Simple model of spiking neurons. IEEE Trans. Neural Networks 2003, 14, 1569–1572. [Google Scholar] [CrossRef] [Green Version]
- Gerstner, W.; Kistler, W.M. Spiking Neuron Models: Single Neurons, Populations, Plasticity; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Bohte, S.M.; Kok, J.N.; La Poutré, H. Error-backpropagation in temporally encoded networks of spiking neurons. Neurocomputing 2002, 48, 17–37. [Google Scholar] [CrossRef] [Green Version]
- She, X.; Dash, S.; Kim, D.; Mukhopadhyay, S. A Heterogeneous Spiking Neural Network for Unsupervised Learning of Spatiotemporal Patterns. Front. Neurosci. 2021, 14, 1406. [Google Scholar] [CrossRef]
- Srinivasa, N.; Cho, Y. Self-Organizing Spiking Neural Model for Learning Fault-Tolerant Spatio-Motor Transformations. IEEE Trans. Neural Networks Learn. Syst. 2012, 23, 1526–1538. [Google Scholar] [CrossRef]
- Kandel, E.R.; Mack, S.; Jessell, T.M.; Schwartz, J.H.; Siegelbaum, S.A.; Hudspeth, A.J. Principles of Neural Science, 5th ed.; McGraw Hill Professional: New York, NY, USA, 2013. [Google Scholar]
- Dora, S.; Suresh, S.; Sundararajan, N. A sequential learning algorithm for a Minimal Spiking Neural Network (MSNN) classifier. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 2415–2421. [Google Scholar]
- Wang, J.; Belatreche, A.; Maguire, L.; McGinnity, T.M. An online supervised learning method for spiking neural networks with adaptive structure. Neurocomputing 2014, 144, 526–536. [Google Scholar] [CrossRef]
- Dora, S.; Suresh, S.; Sundararajan, N. Online Meta-neuron based Learning Algorithm for a spiking neural classifier. Inf. Sci. 2017, 414, 19–32. [Google Scholar] [CrossRef]
- Kasabov, N.K. NeuCube: A spiking neural network architecture for mapping, learning and understanding of spatio-temporal brain data. Neural Netw. 2014, 52, 62–76. [Google Scholar] [CrossRef]
- Hazan, H.; Saunders, D.J.; Khan, H.; Patel, D.; Sanghavi, D.T.; Siegelmann, H.T.; Kozma, R. BindsNET: A Machine Learning-Oriented Spiking Neural Networks Library in Python. Front. Aging Neurosci. 2018, 12, 89. [Google Scholar] [CrossRef]
- Markram, H.; Lübke, J.; Frotscher, M.; Sakmann, B. Regulation of Synaptic Efficacy by Coincidence of Postsynaptic APs and EPSPs. Sci. 1997, 275, 213–215. [Google Scholar] [CrossRef] [Green Version]
- Bi, G.-Q.; Poo, M.-M. Synaptic Modifications in Cultured Hippocampal Neurons: Dependence on Spike Timing, Synaptic Strength, and Postsynaptic Cell Type. J. Neurosci. 1998, 18, 10464–10472. [Google Scholar] [CrossRef]
- Hebb, D.O. The Organization of Behavior: A Neuropsychological Theory; Wiley: New York, NY, USA, 1949. [Google Scholar]
- Diehl, P.U.; Cook, M. Unsupervised learning of digit recognition using spike-timing-dependent plasticity. Front. Comput. Neurosci. 2015, 9, 99. [Google Scholar] [CrossRef] [Green Version]
- Ferré, P.; Mamalet, F.; Thorpe, S. Unsupervised Feature Learning With Winner-Takes-All Based STDP. Front. Comput. Neurosci. 2018, 12, 24. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.H.; Delbruck, T.; Pfeiffer, M. Training Deep Spiking Neural Networks Using Backpropagation. Front. Neurosci. 2016, 10, 508. [Google Scholar] [CrossRef] [Green Version]
- Neftci, E.O.; Mostafa, H.; Zenke, F. Surrogate Gradient Learning in Spiking Neural Networks: Bringing the Power of Gradient-Based Optimization to Spiking Neural Networks. IEEE Signal Process. Mag. 2019, 36, 51–63. [Google Scholar] [CrossRef]
- Zenke, F.; Vogels, T.P. The Remarkable Robustness of Surrogate Gradient Learning for Instilling Complex Function in Spiking Neural Networks. Neural Comput. 2021, 33, 899–925. [Google Scholar] [CrossRef]
- Panda, P.; Aketi, S.A.; Roy, K. Toward Scalable, Efficient, and Accurate Deep Spiking Neural Networks With Backward Residual Connections, Stochastic Softmax, and Hybridization. Front. Neurosci. 2020, 14, 653. [Google Scholar] [CrossRef]
- Shrestha, S.B.; Orchard, G. SLAYER: Spike Layer Error Reassignment in Time. Available online: http://papers.nips.cc/paper/7415-slayer-spike-layer-error-reassignment-in-time.pdf (accessed on 15 October 2019).
- Thorpe, S.; Gautrais, J. Rank Order Coding. In Computational Neuroscience; Plenum press: New York, NY, USA, 1998. [Google Scholar]
- Jeyasothy, A.; Sundaram, S.; Sundararajan, N. SEFRON: A New Spiking Neuron Model With Time-Varying Synaptic Efficacy Function for Pattern Classification. IEEE Trans. Neural Networks Learn. Syst. 2018, 30, 1231–1240. [Google Scholar] [CrossRef] [PubMed]
- Wade, J.J.; McDaid, L.J.; Santos, J.A.; Sayers, H.M. SWAT: A Spiking Neural Network Training Algorithm for Classification Problems. IEEE Trans. Neural Netw. 2010, 21, 1817–1830. [Google Scholar] [CrossRef] [Green Version]
- Kheradpisheh, S.R.; Ganjtabesh, M.; Thorpe, S.J.; Masquelier, T. STDP-based spiking deep convolutional neural networks for object recognition. Neural Netw. 2018, 99, 56–67. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Srinivasan, G.; Panda, P.; Roy, K. Deep Spiking Convolutional Neural Network Trained With Unsupervised Spike-Timing-Dependent Plasticity. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 384–394. [Google Scholar] [CrossRef]
- Dora, S.; Sundaram, S.; Sundararajan, N. An Interclass Margin Maximization Learning Algorithm for Evolving Spiking Neural Network. IEEE Trans. Cybern. 2018, 49, 989–999. [Google Scholar] [CrossRef]
- Tavanaei, A.; Maida, A.S. Bio-Inspired Spiking Convolutional Neural Network using Layer-wise Sparse Coding and STDP Learning. Available online: http://arxiv.org/abs/1611.03000 (accessed on 5 January 2020).
- Machingal, P.; Thousif, M.; Dora, S.; Sundaram, S. Self-regulated Learning Algorithm for Distributed Coding Based Spiking Neural Classifier. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–7. [Google Scholar]
- Wysoski, S.G.; Benuskova, L.; Kasabov, N. Fast and adaptive network of spiking neurons for multi-view visual pattern recognition. Neurocomputing 2008, 71, 2563–2575. [Google Scholar] [CrossRef]
- Kasabov, N.; Dhoble, K.; Nuntalid, N.; Indiveri, G. Dynamic evolving spiking neural networks for on-line spatio- and spectro-temporal pattern recognition. Neural Netw. 2013, 41, 188–201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Florian, R.V. The Chronotron: A Neuron That Learns to Fire Temporally Precise Spike Patterns. PLOS ONE 2012, 7, e40233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohemmed, A.; Schliebs, S.; Matsuda, S.; Kasabov, N. Span: Spike Pattern Association Neuron for Learning Spatio-Temporal Spike Patterns. Int. J. Neural Syst. 2012, 22, 1250012. [Google Scholar] [CrossRef] [PubMed]
- Florian, R.V. Reinforcement Learning Through Modulation of Spike-Timing-Dependent Synaptic Plasticity. Neural Comput. 2007, 19, 1468–1502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, N.; Mazumder, P. Hardware-Friendly Actor-Critic Reinforcement Learning Through Modulation of Spike-Timing-Dependent Plasticity. IEEE Trans. Comput. 2016, 66, 299–311. [Google Scholar] [CrossRef]
- Rosenfeld, B.; Simeone, O.; Rajendran, B. Learning First-to-Spike Policies for Neuromorphic Control Using Policy Gradients. In Proceedings of the 2019 IEEE 20th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar]
- Falanga, D.; Kleber, K.; Scaramuzza, D. Dynamic obstacle avoidance for quadrotors with event cameras. Sci. Robot. 2020, 5, 9712. [Google Scholar] [CrossRef]
- Bing, Z.; Meschede, C.; Huang, K.; Chen, G.; Rohrbein, F.; Akl, M.; Knoll, A. End to End Learning of Spiking Neural Network Based on R-STDP for a Lane Keeping Vehicle. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Shim, M.S.; Li, P. Biologically inspired reinforcement learning for mobile robot collision avoidance. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 3098–3105. [Google Scholar]
- Nast, C.; The future of AI is neuromorphic. Meet the Scientists Building Digital “Brains” for Your Phone. Available online: https://www.wired.co.uk/article/ai-neuromorphic-chips-brains (accessed on 12 September 2021).
- Stagsted, R.; Vitale, A.; Binz, J.; Renner, A.; Larsen, L.B.; Sandamirskaya, Y. Towards neuromorphic control: A spiking neural network based PID controller for UAV. In Proceedings of the Robotics: Science and Systems XVI, Corvalis, OR, USA, 12–16 July 2020. [Google Scholar]
- Dupeyroux, J.; Hagenaars, J.J.; Paredes-Valles, F.; de Croon, G.C.H.E. Neuromorphic control for optic-flow-based landing of MAVs using the Loihi processor. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 96–102. [Google Scholar]
- Vitale, A.; Renner, A.; Nauer, C.; Scaramuzza, D.; Sandamirskaya, Y. Event-driven Vision and Control for UAVs on a Neuromorphic Chip. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 103–109. [Google Scholar]
- Davies, M.; Wild, A.; Orchard, G.; Sandamirskaya, Y.; Guerra, G.A.F.; Joshi, P.; Plank, P.; Risbud, S.R. Advancing Neuromorphic Computing With Loihi: A Survey of Results and Outlook. Proc. IEEE 2021, 109, 911–934. [Google Scholar] [CrossRef]
- Merolla, P.A.; Arthur, J.V.; Alvarez-Icaza, R.; Cassidy, A.S.; Sawada, J.; Akopyan, F.; Jackson, B.L.; Imam, N.; Guo, C.; Nakamura, Y.; et al. A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 2014, 345, 668–673. [Google Scholar] [CrossRef]
- Nurse, E.; Mashford, B.S.; Yepes, A.J.; Kiral-Kornek, I.; Harrer, S.; Freestone, D.R. Decoding EEG and LFP signals using deep learning. In Proceedings of the ACM International Conference on Computing Frontiers, Como, Italy, 16–19 May 2016; pp. 259–266. [Google Scholar]
- Moran, S.; Gaonkar, B.; Macyszyn, L.; Whitehead, W.; Wolk, A.; Iyer, S.S. Deep learning for medical image segmentation – using the IBM TrueNorth neurosynaptic system. In Proceedings of the Medical Imaging 2018: Imaging Informatics for Healthcare, Research, and Applications, Houston, TX, USA, 10–15 February 2018. [Google Scholar]
- Ussa, A.; Vedova, L.D.; Padala, V.R.; Singla, D.; Acharya, J.; Lei, C.Z.; Orchard, G.; Basu, A.; Ramesh, B. A Low-Power End-to-End Hybrid Neuromorphic Framework for Surveillance Applications. Available online: http://arxiv.org/abs/1910.09806 (accessed on 12 September 2021).
- Jin, X.; Furber, S.B.; Woods, J.V. Efficient modelling of spiking neural networks on a scalable chip multiprocessor. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–8 June 2008; pp. 2812–2819. [Google Scholar]
- Schemmel, J.; Briiderle, D.; Griibl, A.; Hock, M.; Meier, K.; Millner, S. A wafer-scale neuromorphic hardware system for large-scale neural modeling. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 1947–1950. [Google Scholar]
- Benjamin, B.V.; Gao, P.; McQuinn, E.; Choudhary, S.; Chandrasekaran, A.R.; Bussat, J.-M.; Alvarez-Icaza, R.; Arthur, J.V.; Merolla, P.A.; Boahen, K. Neurogrid: A Mixed-Analog-Digital Multichip System for Large-Scale Neural Simulations. Proc. IEEE 2014, 102, 699–716. [Google Scholar] [CrossRef]
- Baek, E.; Lee, H.; Kim, Y.; Kim, J. FlexLearn: Fast and Highly Efficient Brain Simulations Using Flexible On-Chip Learning. In Proceedings of the 52nd Annual IEEE/ACM International Symposium on Microarchitecture, Columbus, OH, USA, 12–16 October 2019; pp. 304–318. [Google Scholar]
- Narayanan, S.; Taht, K.; Balasubramonian, R.; Giacomin, E.; Gaillardon, P.-E. SpinalFlow: An Architecture and Dataflow Tailored for Spiking Neural Networks. In Proceedings of the 2020 ACM/IEEE 47th Annual International Symposium on Computer Architecture (ISCA), Valencia, Spain, 30 May–3 June 2020; pp. 349–362. [Google Scholar]
- Singh, S.; Sarma, A.; Jao, N.; Pattnaik, A.; Lu, S.; Yang, K.; Sengupta, A.; Narayanan, V.; Das, C.R. NEBULA: A Neuromorphic Spin-Based Ultra-Low Power Architecture for SNNs and ANNs. In Proceedings of the 2020 ACM/IEEE 47th Annual International Symposium on Computer Architecture (ISCA), Valencia, Spain, 30 May–3 June 2020; pp. 363–376. [Google Scholar]
- Aimone, J.B.; Hamilton, K.E.; Mniszewski, S.; Reeder, L.; Schuman, C.D.; Severa, W.M. Non-Neural Network Applications for Spiking Neuromorphic Hardware. Available online: https://sc18.supercomputing.org/proceedings/workshops/workshop_files/ws_pmes105s1-file1.pdf (accessed on 12 September 2021).
- Talairach, J.; Tournoux, P. Co-planar Stereotaxic Atlas of the Human Brain; Thieme Medical Publishers: New York, NY, USA, 1998. [Google Scholar]
- Saeedinia, S.A.; Jahed-Motlagh, M.R.; Tafakhori, A.; Kasabov, N. Design of MRI structured spiking neural networks and learning algorithms for personalized modelling, analysis, and prediction of EEG signals. Sci. Rep. 2021, 11, 1–14. [Google Scholar] [CrossRef]
- Doborjeh, Z.; Doborjeh, M.; Taylor, T.; Kasabov, N.; Wang, G.Y.; Siegert, R.; Sumich, A. Spiking Neural Network Modelling Approach Reveals How Mindfulness Training Rewires the Brain. Sci. Rep. 2019, 9, 1–15. [Google Scholar] [CrossRef]
- Kasabov, N.; Feigin, V.L.; Hou, Z.-G.; Chen, Y.; Liang, L.; Krishnamurthi, R.; Othman, M.; Parmar, P. Evolving spiking neural networks for personalised modelling, classification and prediction of spatio-temporal patterns with a case study on stroke. Neurocomputing 2014, 134, 269–279. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Šarlija, M.; Kasabov, N. NeuroSense: Short-term emotion recognition and understanding based on spiking neural network modelling of spatio-temporal EEG patterns. Neurocomputing 2021, 434, 137–148. [Google Scholar] [CrossRef]
- Kasabov, N.K. Time-Space, Spiking Neural Networks and Brain-Inspired Artificial Intelligence; Springer: Dordrecht, Netherlands, 2019. [Google Scholar]
- Paulun, L.; Wendt, A.; Kasabov, N. A Retinotopic Spiking Neural Network System for Accurate Recognition of Moving Objects Using NeuCube and Dynamic Vision Sensors. Front. Comput. Neurosci. 2018, 12, 42. [Google Scholar] [CrossRef]
- Kumarasinghe, K.; Kasabov, N.; Taylor, D. Brain-inspired spiking neural networks for decoding and understanding muscle activity and kinematics from electroencephalography signals during hand movements. Sci. Rep. 2021, 11, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, N.; McNabb, C.; Kasabov, N.; Russell, B.R. Integrating Space, Time, and Orientation in Spiking Neural Networks: A Case Study on Multimodal Brain Data Modeling. IEEE Trans. Neural Networks Learn. Syst. 2018, 29, 5249–5263. [Google Scholar] [CrossRef] [PubMed]
- Benuskova, L.; Kasabov, N. Computational Neurogenetic Modeling; Springer Science and Business Media: New York, NY, USA, 2007. [Google Scholar]
- Furber, S. To build a brain. IEEE Spectr. 2012, 49, 44–49. [Google Scholar] [CrossRef]
- Indiveri, G.; Linares-Barranco, B.; Hamilton, T.J.; van Schaik, A.; Etienne-Cummings, R.; Delbruck, T.; Liu, S.-C.; Dudek, P.; Häfliger, P.; Renaud, S.; et al. Neuromorphic Silicon Neuron Circuits. Front. Behav. Neurosci. 2011, 5, 73. [Google Scholar] [CrossRef] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dora, S.; Kasabov, N. Spiking Neural Networks for Computational Intelligence: An Overview. Big Data Cogn. Comput. 2021, 5, 67. https://doi.org/10.3390/bdcc5040067
Dora S, Kasabov N. Spiking Neural Networks for Computational Intelligence: An Overview. Big Data and Cognitive Computing. 2021; 5(4):67. https://doi.org/10.3390/bdcc5040067
Chicago/Turabian StyleDora, Shirin, and Nikola Kasabov. 2021. "Spiking Neural Networks for Computational Intelligence: An Overview" Big Data and Cognitive Computing 5, no. 4: 67. https://doi.org/10.3390/bdcc5040067
APA StyleDora, S., & Kasabov, N. (2021). Spiking Neural Networks for Computational Intelligence: An Overview. Big Data and Cognitive Computing, 5(4), 67. https://doi.org/10.3390/bdcc5040067