
Computer Vision-Based Obstacle Detection Mobile System for Visually Impaired Individuals

 , , , , and
, , , , and
Abstract
1. Introduction
2. Related Work
3. Materials and Methods
3.1. CRISP-DM Methodology
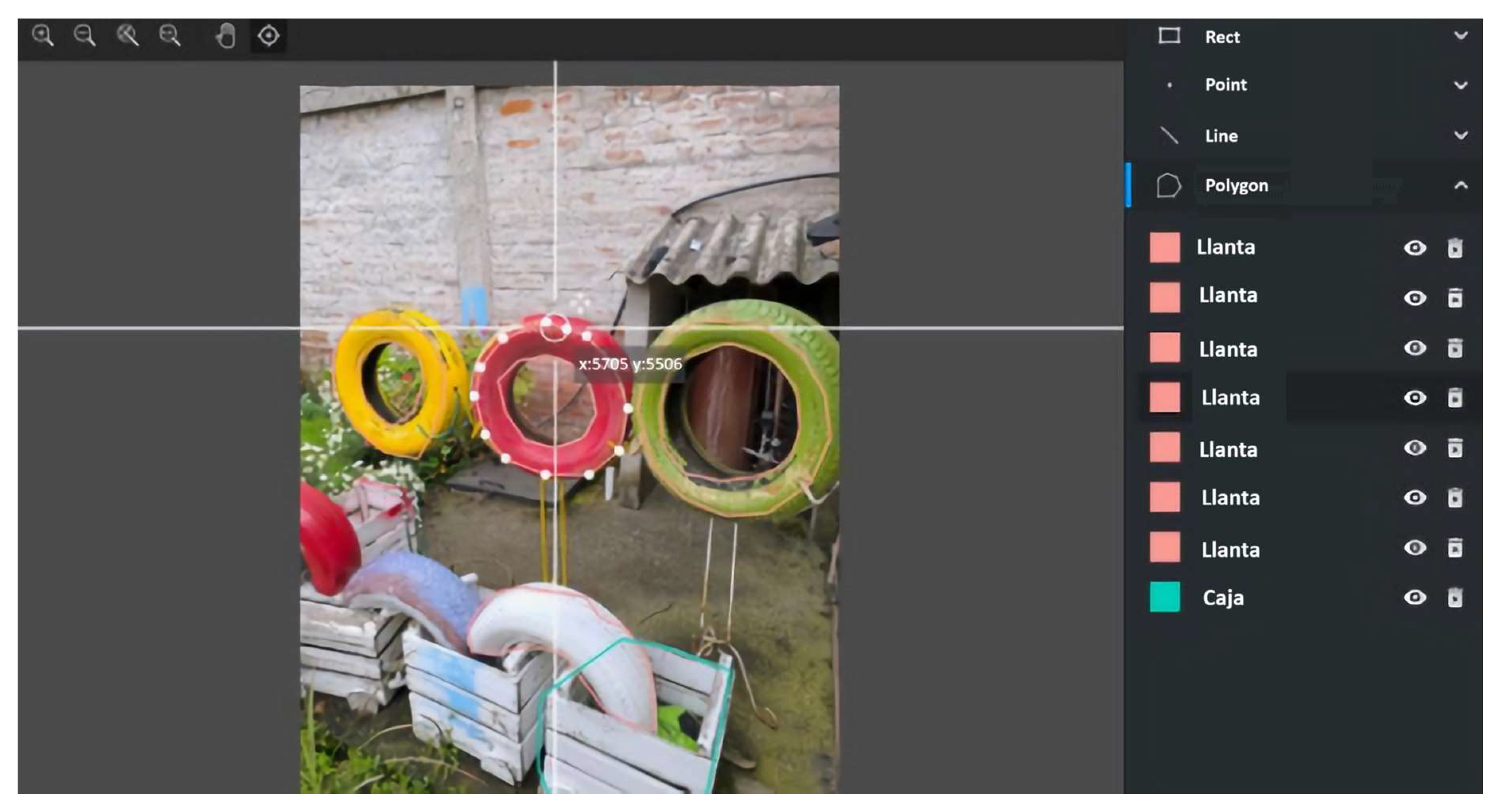
3.2. SCRUBAM Methodology
4. Results
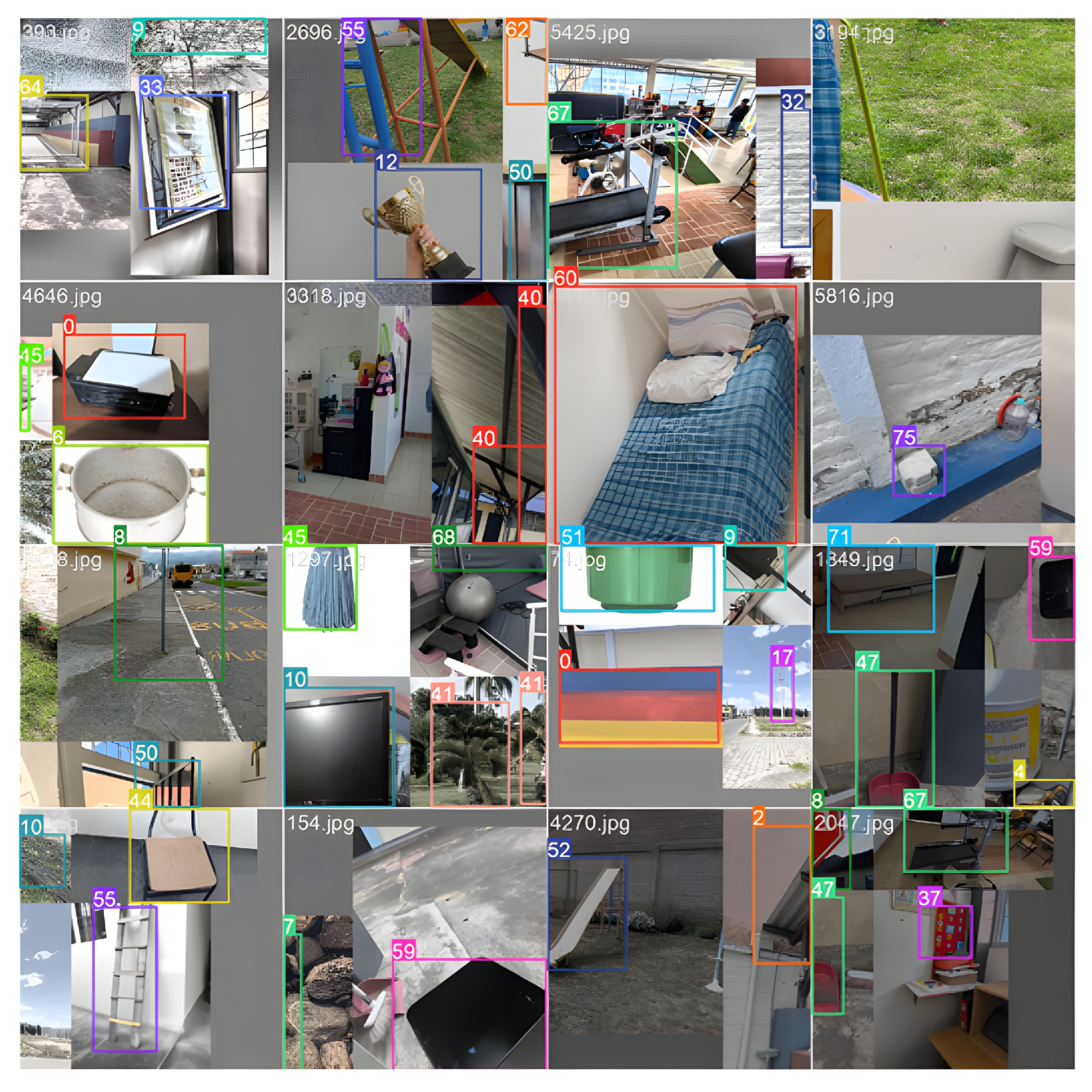
4.1. Dataset
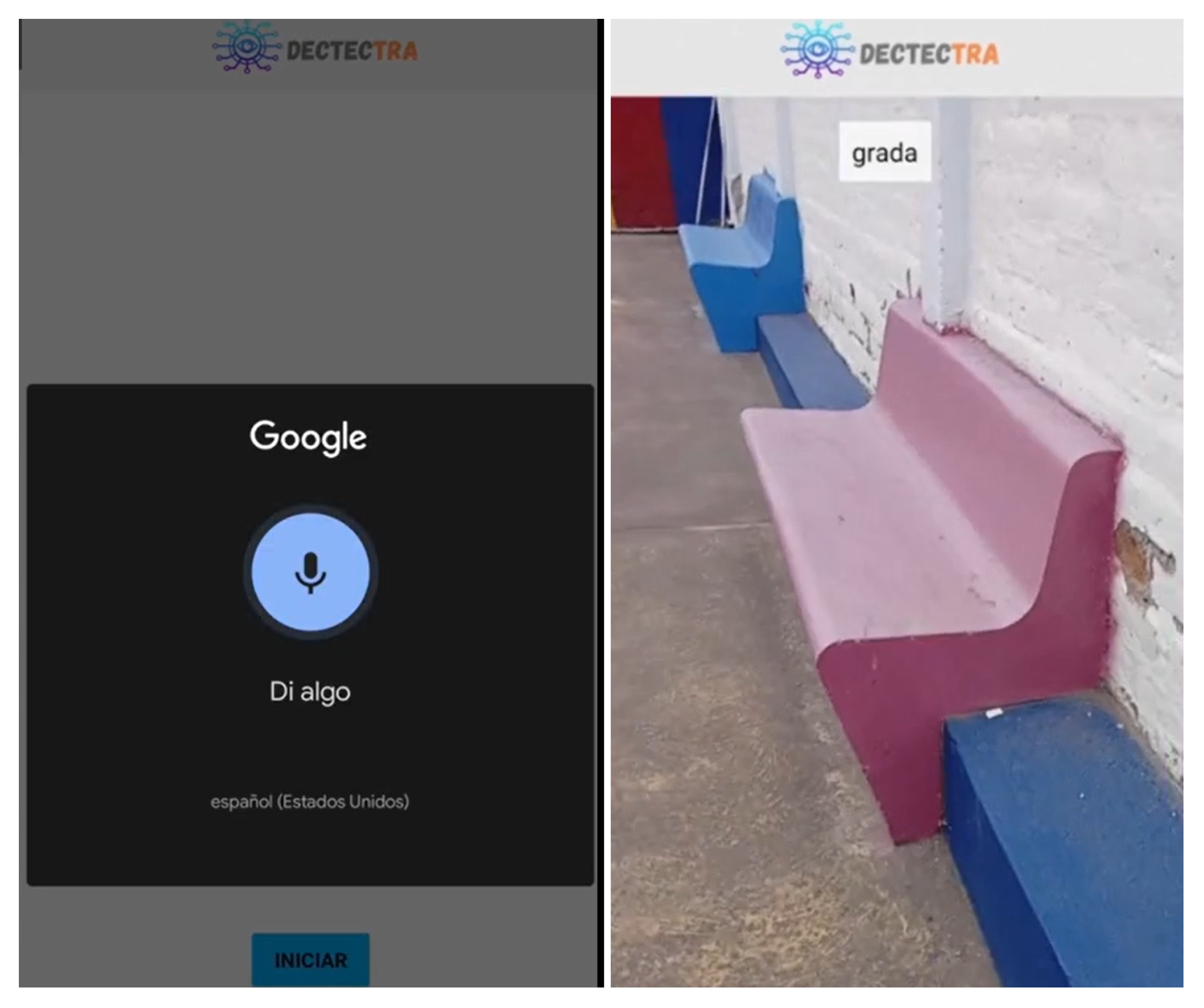
4.2. Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hoang, V.N.; Nguyen, T.H.; Le, T.L.; Tran, T.H.; Vuong, T.P.; Vuillerme, N. Obstacle detection and warning system for visually impaired people based on electrode matrix and mobile Kinect. Vietnam J. Comput. Sci. 2017, 4, 71–83. [Google Scholar] [CrossRef]
- Chang, W.J.; Chen, L.B.; Chen, M.C.; Su, J.P.; Sie, C.Y.; Yang, C.H. Design and implementation of an intelligent assistive system for visually impaired people for aerial obstacle avoidance and fall detection. IEEE Sens. J. 2020, 20, 10199–10210. [Google Scholar] [CrossRef]
- Masud, U.; Saeed, T.; Malaikah, H.M.; Islam, F.U.; Abbas, G. Smart assistive system for visually impaired people obstruction avoidance through object detection and classification. IEEE Access 2022, 10, 13428–13441. [Google Scholar] [CrossRef]
- Suman, S.; Mishra, S.; Sahoo, K.S.; Nayyar, A. Vision navigator: A smart and intelligent obstacle recognition model for visually impaired users. Mob. Inf. Syst. 2022, 2022, 9715891. [Google Scholar] [CrossRef]
- Fujimori, A.; Kubota, H.; Shibata, N.; Tezuka, Y. Leader—Follower formation control with obstacle avoidance using sonar-equipped mobile robots. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 303–315. [Google Scholar] [CrossRef]
- Rahman, M.M.; Islam, M.M.; Ahmmed, S.; Khan, S.A. Obstacle and fall detection to guide the visually impaired people with real time monitoring. SN Comput. Sci. 2020, 1, 219. [Google Scholar] [CrossRef]
- Mahendran, J.K.; Barry, D.T.; Nivedha, A.K.; Bhandarkar, S.M. Computer vision-based assistance system for the visually impaired using mobile edge artificial intelligence. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 2418–2427. [Google Scholar]
- Vijetha, U.; Geetha, V. Obs-tackle: An obstacle detection system to assist navigation of visually impaired using smartphones. Mach. Vis. Appl. 2024, 35, 20. [Google Scholar] [CrossRef]
- Ashiq, F.; Asif, M.; Ahmad, M.B.; Zafar, S.; Masood, K.; Mahmood, T.; Mahmood, M.T.; Lee, I.H. CNN-based object recognition and tracking system to assist visually impaired people. IEEE Access 2022, 10, 14819–14834. [Google Scholar] [CrossRef]
- Zou, Z.; Chen, K.; Shi, Z.; Guo, Y.; Ye, J. Object detection in 20 years: A survey. Proc. IEEE 2023, 111, 257–276. [Google Scholar] [CrossRef]
- Redmon, J. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Mashiata, M.; Ali, T.; Das, P.; Tasneem, Z.; Badal, M.F.R.; Sarker, S.K.; Hasan, M.M.; Abhi, S.H.; Islam, M.R.; Ali, M.F.; et al. Towards assisting visually impaired individuals: A review on current status and future prospects. Biosens. Bioelectron. X 2022, 12, 100265. [Google Scholar] [CrossRef]
- Rahmad, C.; Rawansyah, T.K.; Arai, K. Object Detection System to Help Navigating Visual Impairments. Int. J. Adv. Comput. Sci. Appl. IJACSA 2019, 10, 140–143. [Google Scholar] [CrossRef]
- Alshahrani, A.; Alqurashi, A.; Imam, N.; Alghamdi, A.; Alzahrani, R. Basira: An Intelligent Mobile Application for Real-Time Comprehensive Assistance for Visually Impaired Navigation. Int. J. Adv. Comput. Sci. Appl. IJACSA 2024, 15. [Google Scholar] [CrossRef]
- Khan, W.; Hussain, A.; Khan, B.M.; Crockett, K. Outdoor mobility aid for people with visual impairment: Obstacle detection and responsive framework for the scene perception during the outdoor mobility of people with visual impairment. Expert Syst. Appl. 2023, 228, 120464. [Google Scholar] [CrossRef]
- Chaudhari, M.N.; Deshmukh, M.; Ramrakhiani, G.; Parvatikar, R. Face Detection Using Viola Jones Algorithm and Neural Networks. In Proceedings of the 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 16–18 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Meenakshi, R.; Ponnusamy, R.; Alghamdi, S.; Khalaf, O.I.; Alotaibi, Y. Development of Mobile App to Support the Mobility of Visually Impaired People. Comput. Mater. Contin. 2022, 73, 3473–3495. [Google Scholar] [CrossRef]
- Waqas, A.; Kang, D.; Cha, Y.J. Deep learning-based obstacle-avoiding autonomous UAVs with fiducial marker-based localization for structural health monitoring. Struct. Health Monit. 2024, 23, 971–990. [Google Scholar] [CrossRef] [PubMed]
- Wirth, R.; Hipp, J. CRISP-DM: Towards a standard process model for data mining. In Proceedings of the 4th International Conference on the Practical Applications of Knowledge Discovery and data Mining, Manchester, UK, 11–13 April 2000; Volume 1, pp. 29–39. [Google Scholar]
- Alqudah, M.; Razali, R. An empirical study of Scrumban formation based on the selection of scrum and Kanban practices. Int. J. Adv. Sci. Eng. Inf. Technol. 2018, 8, 2315–2322. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Environmental Conditions | Number of Images | Total |
|---|---|---|---|
| Training | Clear day | 4000 | 6000 |
| Cloudy day | 2000 | ||
| Validation | Clear day | 1000 | 1520 |
| Cloudy day | 520 | ||
| Test | Clear day | 40 | 80 |
| Cloudy day | 40 | ||
| Final | 7600 |
| Interior | Exterior |
|---|---|
| Leg exerciser | Pole |
| Furniture | Planter |
| Mat | Tree |
| Voltage regulator | Tire |
| Ball | Seesaw |
| Treadmill | Brick |
| Rehabilitation ladder | Block |
| Parallel bars | Structure |
| Cone | Palm tree |
| Stretcher | Mop |
| Bed | Broom |
| Speaker | Door |
| Board | Bucket |
| Sign | Slide |
| Shelf | Merry-go-round |
| Desk | Swing |
| Table | Ladder |
| Chair | Handrail |
| Trash can | Laundry area |
| Legos | Seat |
| Billboard | Arch |
| Printer | Dispenser |
| First aid kit | Grill |
| Refrigerator | Toilet |
| Box | Cover |
| Flag | Sink |
| Computer | Rock |
| Closet | Signage |
| Trophy | Plant |
| Abacus | Step |
| Television | Grandstand |
| Counter | Glass |
| Filing cabinet | Faucet |
| Pot | Window |
| Plate | Hose |
| Glass | Bicycle |
| Cylinder | Wall |
| Folder | Dustpan |
| Model | Epochs | mAP(0.50:0.95) | mRecall | mPrecision | Accuracy |
|---|---|---|---|---|---|
| YOLO-50 | 50 | 0.02 | 0.57 | 0.58 | 0.53 |
| YOLO-100 | 100 | 0.22 | 0.69 | 0.69 | 0.65 |
| YOLO-300 | 300 | 0.42 | 0.77 | 0.79 | 0.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastidas-Guacho, G.K.; Paguay Alvarado, M.A.; Moreno-Vallejo, P.X.; Moreno-Costales, P.R.; Ocaña Yanza, N.S.; Troya Cuestas, J.C. Computer Vision-Based Obstacle Detection Mobile System for Visually Impaired Individuals. Multimodal Technol. Interact. 2025, 9, 48. https://doi.org/10.3390/mti9050048
Bastidas-Guacho GK, Paguay Alvarado MA, Moreno-Vallejo PX, Moreno-Costales PR, Ocaña Yanza NS, Troya Cuestas JC. Computer Vision-Based Obstacle Detection Mobile System for Visually Impaired Individuals. Multimodal Technologies and Interaction. 2025; 9(5):48. https://doi.org/10.3390/mti9050048
Chicago/Turabian StyleBastidas-Guacho, Gisel Katerine, Mario Alejandro Paguay Alvarado, Patricio Xavier Moreno-Vallejo, Patricio Rene Moreno-Costales, Nayely Samanta Ocaña Yanza, and Jhon Carlos Troya Cuestas. 2025. "Computer Vision-Based Obstacle Detection Mobile System for Visually Impaired Individuals" Multimodal Technologies and Interaction 9, no. 5: 48. https://doi.org/10.3390/mti9050048
APA StyleBastidas-Guacho, G. K., Paguay Alvarado, M. A., Moreno-Vallejo, P. X., Moreno-Costales, P. R., Ocaña Yanza, N. S., & Troya Cuestas, J. C. (2025). Computer Vision-Based Obstacle Detection Mobile System for Visually Impaired Individuals. Multimodal Technologies and Interaction, 9(5), 48. https://doi.org/10.3390/mti9050048