1. Introduction
In recent years, with the development of virtual reality (VR) technology, various methods have been developed to present responses to stimuli and operations during tasks and experiences in VR spaces. Currently, the most common method is to use vibrators built into the controllers of VR devices. This simple method is used on many VR devices, such as Meta Quest, VIVE Pro, and PlayStation VR. However, tactile stimuli are limited to vibration patterns, and it is not possible to present the tactile sensations of objects in the VR space, such as hardness and softness.
Methods for presenting a sense of hardness, softness, or resistance include those that present a sense of touch by wearing a tactile presentation device or having physical contact [
1,
2,
3,
4]. These devices present a sense of hardness, softness, or resistance by mechanically presenting a reaction force in response to the user’s manipulation. In addition, methods to present tactile sensations by having a user interact with an installed tactile presentation device have also been studied [
5,
6,
7,
8,
9]. In these devices, the user interacts with the operating unit of the device, and the corresponding tactile sensation is returned as a response. Further, the vibration-based hardness display is also developed [
10]. However, these devices are complicated and costly and have spatial limitations, especially for installed devices.
The development of tactile presentation methods without physical contact is also in progress to free the hand from device mounting and spatial constraints, providing a more unrestricted VR experience. One of these is a method that uses ultrasound to present tactile sensations in a hollow space [
11,
12], and another is a method that utilizes pseudo-haptics, which is generated by the discrepancy between vision and proprioceptive sensation, the sense of motion, and the body’s position. Pseudo-haptics (PH) [
13,
14,
15] does not require a haptic presentation device and has attracted attention because it can present haptic feedback in VR without compromising the immersive experience [
16,
17].
Pseudo-haptics is one of the methods to present tactile sensations without using a haptic presentation device. For example, resistance feelings [
13,
16,
18], hardness feelings [
13,
19,
20,
21], weight feelings [
22,
23,
24], and surface roughness feelings [
25,
26,
27] are researched. It does not require a haptic presentation device and has attracted attention because it can present haptic feedback in VR without compromising the immersive experience. Pseudo-haptics is generated by a change in the ratio of visual output to physical input (C/D ratio: control/display ratio).
In VR, a method to generate pseudo-haptics in body parts is to acquire actual body movements using body tracking and display them in VR by applying the C/D ratio. In this method, the C/D ratio given to the body parts is usually uniform, and the perceived sensation and its intensity are generally the same for each part. Advances in body tracking technology enable a greater degree of freedom of expression of the body. The technology will broaden the applications of the pseudo-haptics field. Furthermore, many pseudo-haptics methods using multisensory information, rather than just a single visual stimulus, have been proposed. For example, there are studies that combine visual information with vibration information applied to the wrist [
28], studies that combine it with electrical stimulation [
29], studies that combine it with auditory information [
30], and studies that increase the effect by generating multi-point pseudo haptics [
31].
However, the effects of pseudo-haptics applied only partially are not well recognized. Here, we define such pseudo-haptics as partial pseudo-haptics. A better understanding of the effects of partial pseudo-haptics is crucial for broader real-world applications and could potentially broaden the range of tactile presentation. We hypothesized that partial pseudo-haptics, where a stimulus is applied only partially to adjacent body parts, might exhibit different characteristics compared to conventional methods. Therefore, we investigated how perceived sensation changes when partial pseudo-haptics stimuli are applied to a few fingers.
Under partial pseudo-haptics conditions, our research questions are as follows:
Does the conflict between proprioception and cutaneous sensation influence perceived sensation?
Does the type of movement (quasi-static vs. dynamic) affect the perceived sensation?
Does the influence of partial pseudo-haptics on adjacent body parts affect the perceived sensation?
This research examined how perceived sensations change when partial pseudo-haptic stimuli are induced to adjacent body parts. Specifically, we investigated the effect of conflict between proprioception and cutaneous sensation, the correlation between finger states and the magnitude of illusory perception during both quasi-static and dynamic movements, and identified the finger that experienced discomfort during dynamic movements under pseudo-haptics.
2. Method
To evaluate the aforementioned research questions, we conducted the following three experiments. We used the Meta Quest 2 for hand tracking and visual feedback in these experiments. Since the hand-tracking function of Vive was still in beta version, and PlayStation VR hand tracking was not available as of November 2022. Based on their tracked postures, pseudo-visual feedback of the user’s hand was created using Unity (Ver. 2020.3.42f1, released on 17 November 2022). We employed the standard hand-tracking functionality of the Meta Quest 2 for hand tracking. This functionality does not require calibration. For better tracking, we position the user’s hands with the palms facing the HMD. This is because preliminary experiments indicated that this position results in better finger tracking. Furthermore, we verified the recognized angles before each experiment by recording two finger poses: straight and bent at 90 degrees. The angles of the pseudo-fingers were modified by the C/D ratio based on the measured real angles of their fingers.
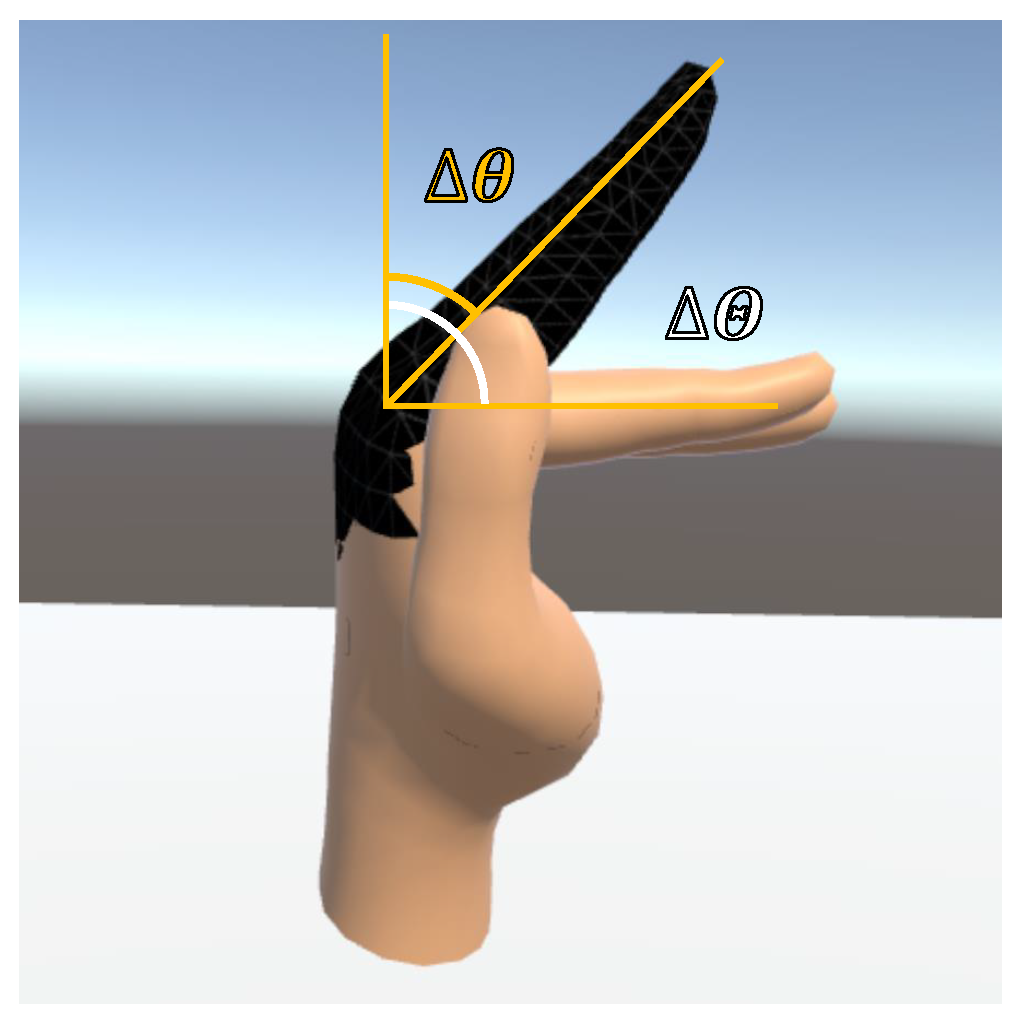
The following equations and
Figure 1 show the relationship between the angles of real fingers and pseudo-fingers. The black hand shows the real finger postures, while the skin-colored hand shows the pseudo-finger postures. The C/D ratio modified the joint angles.
In the equation,
is the real angle,
is the C/Dratio, and
is the angle of pseudo-fingers.
The research by Jones et al. [
32] demonstrated that the proprioceptive location in the left and right hands is highly precise. Based on this finding, we hypothesized that the left hand can precisely imitate the sensations experienced on the right hand. When the right-hand finger reached the indicated angle, participants were instructed to reproduce the perceived posture of their right fingers using their left hand, which was not visible within the VR space.
After the reproduction was completed, the bending angles of both hands were recorded. The shift ratio, defined by the following equation (Equation (
2),) was calculated on the basis of the recorded angles.
In the equation, T is denoted by the following parameters: T is the target angle, is the average of the target angle, A is the bending angle of the fingers of the right hand, and is the average of the user’s bending angle. If the shift ratio changes according to the C/D ratio, this shows that the effect of pseudo-haptics is working appropriately. We investigated the change in proprioceptive sensation by examining how the shift ratio obtained changes with the change in the C/D ratio.
In the first and second experiments, the angles of the metacarpophalangeal joints (MP joints, third joints) were modified according to the C/D ratio. In the third experiment, all angles distal interphalangeal joints (DP joints, first joints), proximal interphalangeal joints (PIP joints, second joints), and metacarpophalangeal joints were modified according to the C/D ratio.
3. Experiment
In this section, we describe experiments conducted to investigate how each finger’s proprioceptive sense changes when the pseudo-haptics effect is applied partially to adjacent fingers. In each experiment, the postures of the participants’ fingers were recorded. After each experiment, we collected subjective reports from the participants about their experiences.
We focused on the transformation of proprioceptive sensation in each finger as an index to judge pseudo-haptic generation. To investigate changes in the proprioceptive sensation of each finger, Experiments 1 and 2 were conducted under two different conditions: one in which there was no movement of the finger and the other in which there was movement of the finger. Experiment 3 investigated the distribution of sensations perceived when partial pseudo-haptics was applied to the adjacent fingers.
3.1. Experiment 1: Sensation Under Quasi-Static Movement
We initially examined the magnitude of illusory perception when partial pseudo-haptics were applied to adjacent body parts during quasi-static movements.
3.1.1. Method
In this experiment, we evaluated perceived sensations under conditions of conflict between proprioception and cutaneous sensation and during the application of partial pseudo-haptics stimulation to adjacent body parts. The evaluation was achieved by comparing the following three conditions for finger movements.
Pattern 1: Adjacent fingers closed, applied pseudo-haptics to all fingers
Pattern 2: Adjacent fingers closed, applied pseudo-haptics to partial fingers (index, middle)
Pattern 3: Adjacent fingers open, applied pseudo-haptics to partial fingers (index, middle)
Seven male participants aged 22 to 24 years participated in the experiment. Based on research [
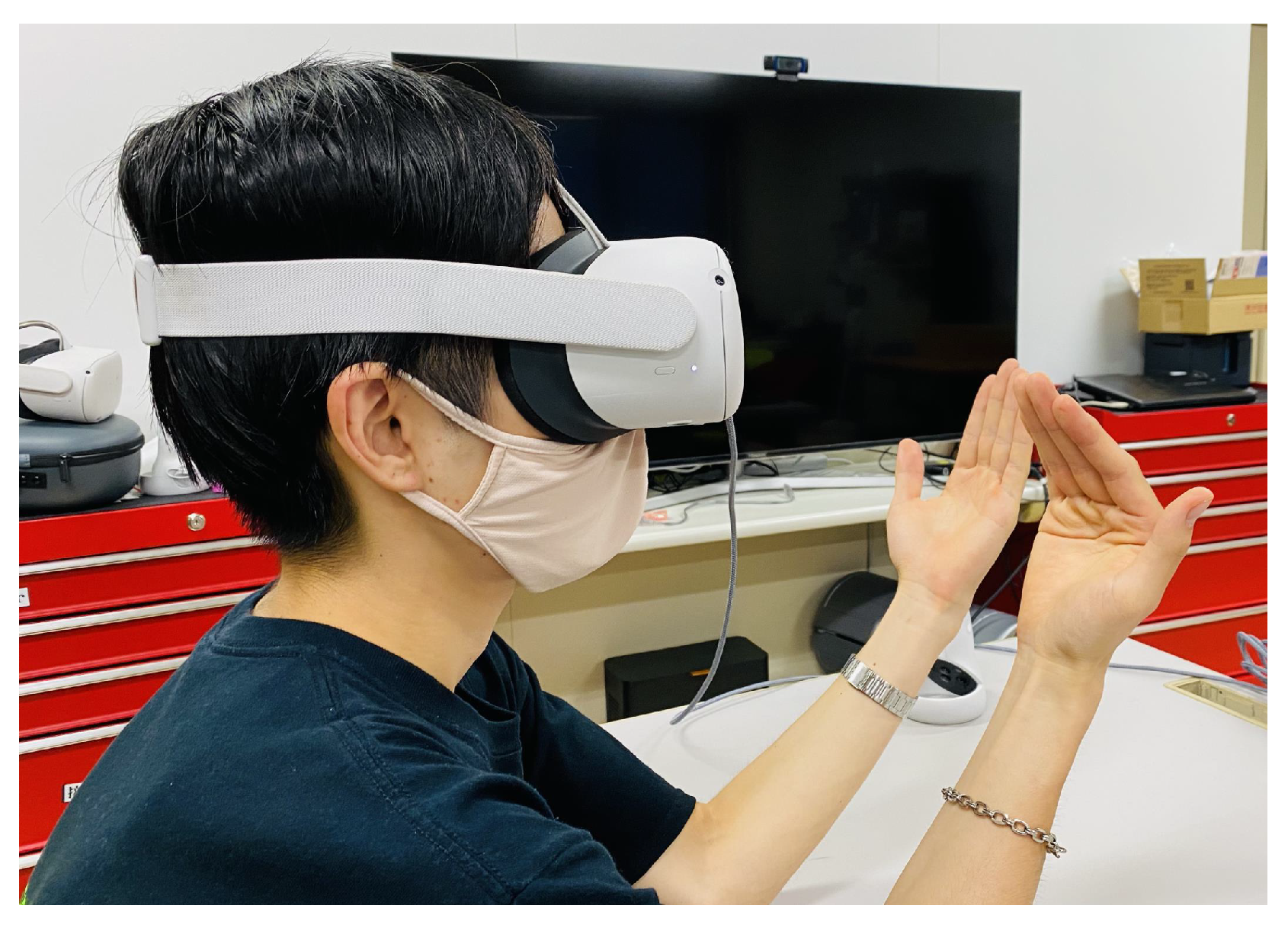
33], the precision of the Meta Quest 2 is about 9° on average. In order to optimize measurement accuracy, we conducted an experiment in which participants placed their hands directly in front of the HMD, a posture that we found minimized joint measurement errors. Participants were seated and wore an HMD, positioning their palms facing the HMD to track their hands (
Figure 2). Only the pseudo-right hand, where pseudo-haptics were applied, was displayed during the experiment. Participants were instructed to simultaneously bend their right hand’s four fingers (index, middle, ring, and little) once, while keeping the first and second joints of each finger straight. They were then instructed to stop at the indicated angle.
For each trial, the C/D ratio of each finger was randomly set to a value between 0.7 and 1.3 in increments of 0.1. In addition, the three patterns of fingers were also randomly selected. The experiment involved 105 trials per participant, with each condition (a combination of 3 finger patterns and 7 C/D ratios) repeated five times. The angle to which participants were instructed to bend their fingers was randomly selected between 30° and 50° for each trial.
3.1.2. Result and Discussion
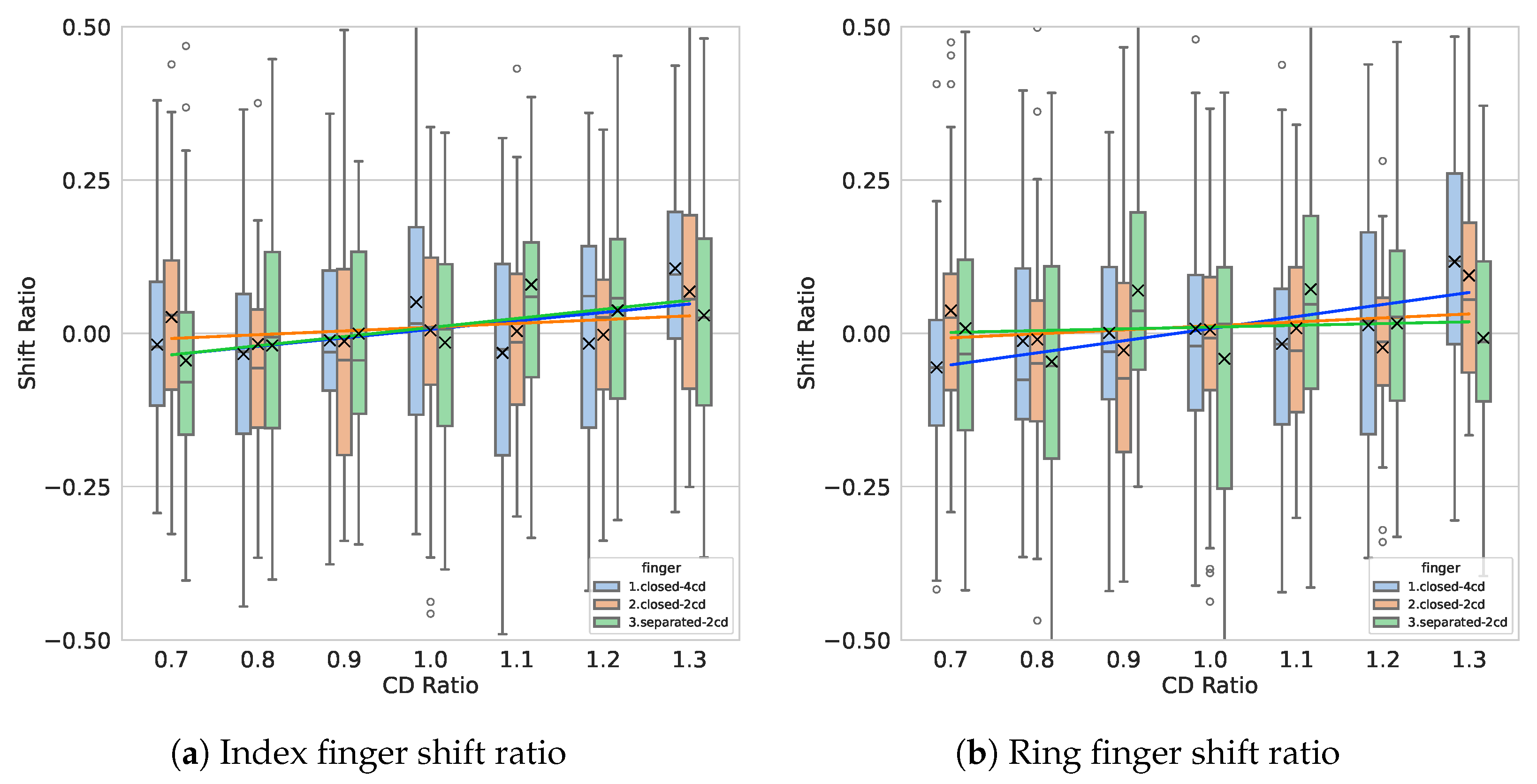
The experimental results for each pattern are shown in
Figure 3a,b. To evaluate the pseudo-haptics’ effect, we analyzed data from the index and ring fingers. The index finger represented the condition with a partial pseudo-haptics effect, while the ring finger represented the condition without partial pseudo-haptics.
Figure 3a shows the results of the index finger, and
Figure 3b shows the results of the ring finger. The horizontal axis shows the C/D ratio, and the vertical axis shows the shift ratio.
Participants reported the following experiences:
There was a discrepancy between tactile sensation and visual perception, which resulted in a sense of incongruity.
The lack of congruence between the visual stimulus and the tactile feedback gave rise to a sense of unnaturalness.
The Shapiro–Wilk normality test indicated that the shift ratios of an index finger were not normally distributed. Therefore, Spearman’s rank correlation coefficients and their corresponding 95% confidence intervals (CIs) were calculated for each pattern in the index finger analysis (
Figure 3a). The correlation coefficient,
p-value, and 95% CI for each pattern are as follows:
Pattern 1: Correlation coefficient = 0.16, p-value = 0.01, 95% CI 0.035–0.28
Pattern 2: Correlation coefficient = 0.09, p-value = 0.17, 95% CI −0.038–0.21
Pattern 3: Correlation coefficient = 0.13, p-value = 0.04, 95% CI 0.0060–0.25
The null hypothesis of no correlation was rejected at the 5% significance level for patterns 1 and 3. Post-hoc tests revealed no significant differences in correlation coefficients among all pairs of conditions at the significance level 5%.
The Shapiro–Wilk normality test indicated that the shift ratios of a ring finger were not normally distributed. Therefore, Spearman’s rank correlation coefficients and their corresponding 95% confidence intervals (CIs) were calculated for each pattern in the ring finger analysis (
Figure 3a). The correlation coefficient,
p-value, and 95% CI for each pattern are as follows:
Pattern 1: Correlation coefficient = 0.19, p-value = 0.003, 95% CI: 0.065–0.31
Pattern 2: Correlation coefficient = 0.08, p-value = 0.20, 95% CI: −0.043–0.21
Pattern 3: Correlation coefficient = 0.03, p-value = 0.59, 95% CI: −0.092–0.16
The null hypothesis of no correlation was rejected at the significance level 5% for pattern 1. Post hoc tests revealed a significant difference in correlation coefficients between patterns 1 and 3 at the significance level 5%.
Combining the results of the index and ring finger analyses, we found that the index finger followed the visual stimuli of pseudo-haptics under pattern 1 and pattern 3 conditions. However, under pattern 2 condition, the index finger did not follow the visual stimuli.
For the ring finger, a correlation was observed under pattern 1, indicating that it moved according to the index finger. In contrast, no correlation was found under the conditions of pattern 2 and pattern 3. Given that the index finger also did not follow the visual stimuli under the pattern 2 condition, it suggests that the presentation of pseudo-haptics was unsuccessful. On the other hand, since the index finger followed the visual stimuli under pattern 3 condition, it indicates that the ring finger perceived a different finger movement from the intended pseudo-haptics stimulus.
These findings suggest that the effectiveness of pseudo-haptics can vary depending on whether adjacent fingers are closed or open.
3.2. Experiment 2: Sensation Under Dynamic Movement
Subsequently, we investigated the magnitude of illusory perception during dynamic movements with pseudo-haptics.
3.2.1. Method
Employing a similar experimental setup as in Experiment 1, participants reproduced the perceived posture of their right hand using their left hand under the influence of pseudo-haptics.
Seven participants aged between 21 and 24 years (6 men and 1 woman) participated in the experiment. The procedure of this experiment was almost identical to that of Experiment 1. Participants were instructed to simultaneously bend their right-hand four fingers (index, middle, ring, and little), while keeping the first and second joints of each finger straight. However, unlike in Experiment 1, where participants performed a quasi-static movement by bending their fingers only once, in Experiment 2, participants performed a dynamic movement by repeatedly bending and straightening their fingers. After that, participants were asked to reproduce the upper and lower limits of their bending range with their left hand at a designated time. Angles were recorded and the shift ratio was calculated and compared to investigate changes in proprioception.
In this experiment, two types of finger-bending patterns were used. Pattern 2 used in Experiment 1, where the adjacent fingers were closed and partial pseudo-haptics are applied to the index and middle fingers, was not used in this experiment. This was because partial pseudo-haptics were effective only when adjacent fingers were open.
Similarly to Experiment 1, the C/D ratio was randomly changed to a value between 0.7 and 1.3 in increments of 0.1 for each trial. A total of 5 trials were conducted for each pattern of fingers with changing C/D ratios and for each condition of the changing C/D ratio, resulting in a total of 70 trials per participant. The range of bending angle was a random angle between 30° and 50° for each trial. This was achieved by comparing the following two conditions for finger movements.
Pattern 1: Adjacent fingers closed, applied a C/D ratio to all fingers
Pattern 2: Adjacent fingers open, applied a C/D ratio to partial fingers (index, middle)
3.2.2. Result and Discussion
The experimental results for each pattern are shown in
Figure 4a,b.
Figure 4a shows the results of the index finger, and
Figure 4b shows the results of the ring finger. The horizontal axis shows the C/D ratio and the vertical axis shows the shift ratio.
Participants reported the following experiences:
There was a perceptual illusion that my finger was being drawn towards the visual stimulus.
I experienced a spatial disorientation regarding the location of my finger.
I was unable to accurately perceive the spatial relationship between my fingers.
The Shapiro–Wilk normality test indicated that the shift ratios of an index finger were not normally distributed. Therefore, Spearman’s rank correlation coefficients and their corresponding 95% confidence intervals (CIs) were calculated for each pattern in the index finger analysis (
Figure 4a). The correlation coefficient,
p-value, and 95% CI for each pattern are as follows:
Pattern 1: Correlation coefficient = 0.11, p-value = 0.077, CI: −0.012–0.24
Pattern 2: Correlation coefficient = 0.11, p-value = 0.086, CI: −0.016–0.23
Although each graph shows some correlation trends, the null hypothesis of no correlation was not rejected at the significance level 5% for patterns 1 and 2. Post-hoc tests revealed no significant differences in correlation coefficients between patterns 1 and 2 at the significance level of 5%. By comparing the result of Experiment 1, the scale of the shift rate of dynamic movement is three times larger than quasi-static movement.
The Shapiro-Wilk normality test indicated that the shift ratios of a ring finger were not normally distributed. Therefore, Spearman’s rank correlation coefficients and their corresponding 95% confidence intervals (CIs) were calculated for each pattern in the ring finger analysis (
Figure 4b). The correlation coefficient,
p-value, and 95% CI for each pattern are as follows:
Pattern 1: Correlation coefficient = 0.27, p-value = 0.000014, CI: 0.15–0.39
Pattern 2: Correlation coefficient = 0.23, p-value = 0.00035, CI: 0.10–0.34
The null hypothesis of no correlation was rejected at the significance level of 5% for patterns 1 and 2. Post hoc tests revealed a significant difference in correlation coefficients between patterns 1 and 2 at the significance level of 5%. By comparing the result of Experiment 1, the scale of the shift rate of dynamic movement is three times larger than quasi-static movement.
Combining the results of the index and ring finger analyses, although each of the graphs shows some correlation trends, the null hypothesis of no correlation was not rejected at the significance level 5% for patterns 1 and 2. Compared to the index finger result, in the ring finger result, the null hypothesis of no correlation was rejected at the significance level 5% for patterns 1 and 2. Post hoc tests revealed a significant difference in correlation coefficients between patterns 1 and 2 at the significance level of 5% in the ring finger analysis.However, there is no statistically significant difference between the two correlations. The correlation coefficient of pattern 1 is 1.5 times higher than that of pattern 2. This fact weakly supports the idea that the effect of pseudo-haptics is weaker in pattern 2 than in pattern 1.
By comparing the result with Experiment 1, in the result of both the index and ring finger, the scale of the shift rate of dynamic movement is three times larger than quasi-static movement. This indicates that the pseudo-haptic effect is more significant under the dynamic movement than that under the quasi-static movement. However, the linearity of the impact became vague under dynamic movement compared to quasi-static movement.
3.3. Experiment 3: Sensation Under Several Pseudo-Haptics Patterns
Lastly, we explored which finger experienced discomfort when partial pseudo-haptics were applied during dynamic movements. The discomfort is different, including pseudo-haptics, from normal proprioceptive sensation in grasping movement.
3.3.1. Method
To examine sensations experienced during natural, goal-directed actions, Experiment 3 involved a task that required participants to grasp objects. This differed from Experiments 1 and 2, which focused on proprioception. We hypothesized that participants would consistently report a greater sense of discomfort in the finger where the pseudo-haptic illusion was applied, regardless of the experimental condition. To verify this hypothesis, we conducted experiments with six conditions, each varying the location of the illusion. Participants were required to provide a forced-choice response indicating if they felt a sensation of discomfort.
Eight male participants and one female participant, aged 21 to 24 years, participated in the experiment. The participants were seated and wore an HMD, positioning their right hand in front of the HMD to track their hands. A rod-shaped object was displayed in the VR space (
Figure 5a). When the experiment started, the participant’s right hand was displayed with partial pseudo-haptics applied to some of the fingers. Participants were instructed to grasp the virtual object with a reverse grip, palm facing the HMD (
Figure 5b). Upon slight squeezing of the virtual rod, the participants reported any fingers that felt discomfort. Responses were forced choice: “felt” or “did not feel” a sensation of discomfort. There was no limit to the number of fingers that could be reported.
Six patterns were used to alter the C/D ratios of the fingers.
Pattern 1: Partial pseudo-haptics are applied to the index and middle fingers.
Pattern 2: Partial pseudo-haptics are applied to the middle and ring fingers.
Pattern 3: Partial pseudo-haptics are applied to the index and ring fingers.
Pattern 4: Partial pseudo-haptics are applied to the ring and little fingers.
Pattern 5: Partial pseudo-haptics are applied to the index and little fingers.
Pattern 6: Partial pseudo-haptics are applied to the middle and little fingers.
For each trial, the C/D ratio of the manipulated fingers was randomly set to a value between 0.7 and 1.3 in 0.1 increments. One of the six finger pattern variations was randomly selected for each trial. In total, 210 trials per participant were conducted to ensure that each combination of finger pattern and C/D ratio was tested five times.
3.3.2. Results and Discussion
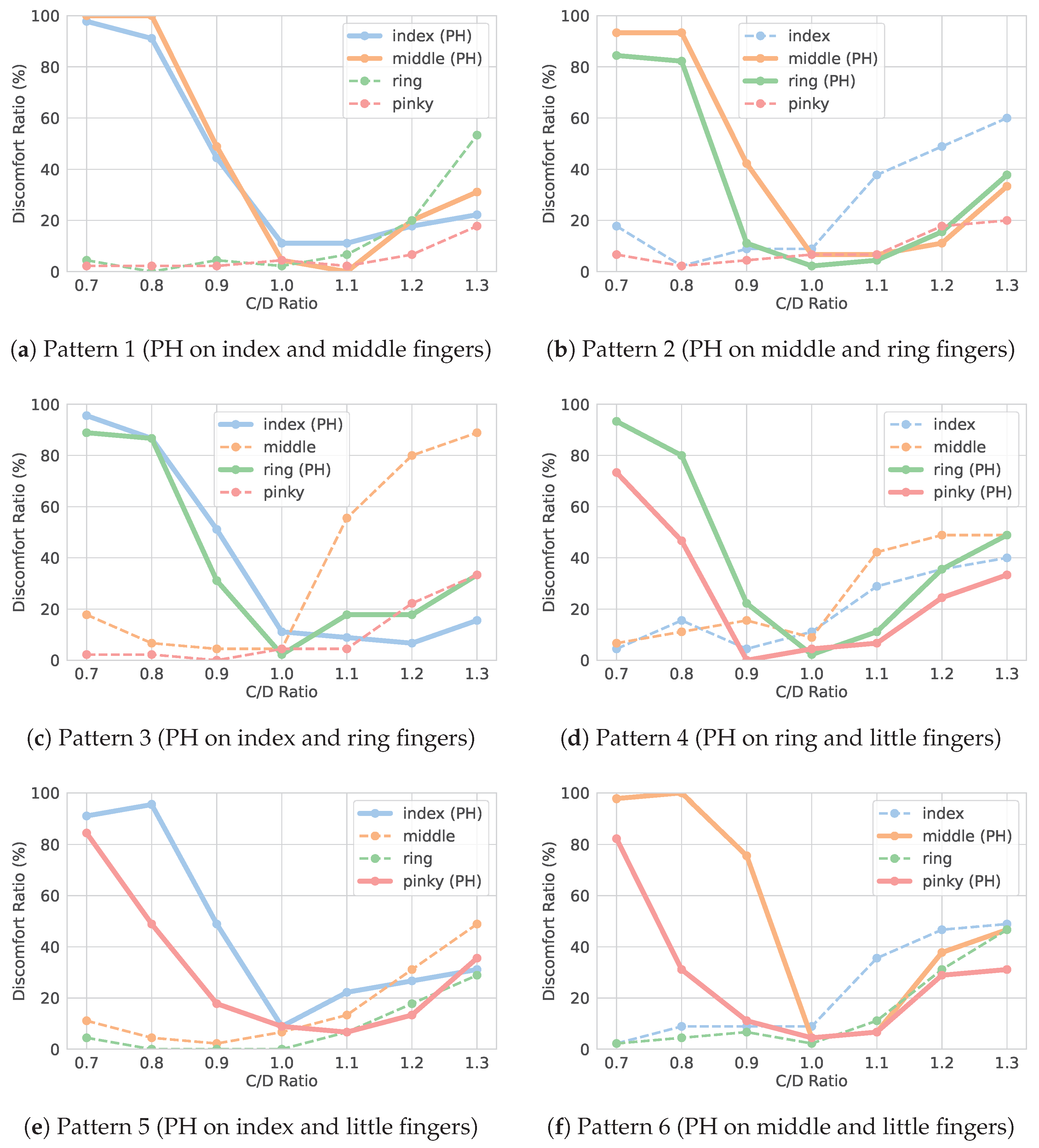
The following figures (
Figure 6a–f) show the experimental results for each pattern, illustrating the percentage of trials in which participants reported discomfort in each finger. The horizontal axis represents the C/D ratio, and the vertical axis represents the percentage of participants who reported feeling discomfort in the finger.
From the figures, each pattern shows the following features:
Pattern 1: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied pseudo-haptics (PH); however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. The ring finger shows a particularly significant increase.
Pattern 2: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied PH; however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. Especially, the index finger shows a significant increase in the range of 1.0–1.3. The ring and little fingers show a similar increasing pattern.
Pattern 3: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied PH; however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. Especially, the middle finger shows a significant increase in the range of 1.0–1.3. The ring and little fingers show a similar increasing pattern.
Pattern 4: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied PH; however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. The index and middle fingers show a significant change even at 1.1. The ring and little fingers show a similar increasing pattern.
Pattern 5: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied PH; however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. The ring and little fingers show a similar increasing pattern.
Pattern 6: In the range of C/D ratio 0.7–1.0, discomfort increases in the finger with applied PH; however, in the range of 1.0–1.3, discomfort increases to the same extent in the finger without applied PH. The index finger shows a significant increase even at 1.1. The ring and little fingers show a similar increasing pattern.
In summary, the Figures and
Table 1 reveal that when the C/D ratio was less than 1.0, the solid lines, representing the condition with pseudo-haptics applied, exhibited significantly higher discomfort ratios compared to other conditions. This trend was consistent across all patterns. Conversely, when the C/D ratio exceeded 1.0, discomfort levels increased across all fingers, with the most pronounced effect observed in fingers without pseudo-haptics.
These findings suggest that participants are more sensitive to relative differences in finger movement. When pseudo-haptics induced an inhibitory effect, discomfort was primarily localized to the stimulated finger. However, when pseudo-haptics had a promotional effect, discomfort extended to fingers without pseudo-haptics. This highlights the crucial role of the relative movement of the finger in shaping tactile perception.
Our analysis of individual finger responses revealed that for C/D ratios exceeding 1.0, the ring and little fingers exhibited similar patterns of discomfort regardless of pseudo-haptic stimulation. This finding aligns with the anatomical connection between these two fingers, mediated by the flexor digitorum superficialis, which facilitates their synchronous movement. In contrast, for the index and middle fingers, discomfort was significantly higher in the absence of pseudo-haptic stimulation.
While our results demonstrate that applying partial pseudo-haptics can induce distinct sensations in individual fingers, they also highlight the importance of relative finger movement in shaping tactile perception. Specifically, our findings suggest that participants are more likely to perceive discomfort in regions with restricted movement. In conventional pseudo-haptics research, the illusion is effective only at the point of application. In contrast, our research reveals that some illusions are effective not only at the point of application but also in adjacent areas. This finding is significant for the design of pseudo-haptics-based applications, particularly when multiple effects are applied to adjacent body parts. These results have significant implications for the design of effective pseudo-haptic experiences.
4. Conclusions and Future Works
This study investigated how perceived sensations change when pseudo-haptics are partially applied to adjacent body parts. We examined the relationship between the state of the fingers during quasi-static and dynamic movements, the magnitude of the illusion, and which finger experienced discomfort during dynamic movement with pseudo-haptics applied.
In Experiment 1, we first examined the magnitude of the illusion caused by pseudo-haptics induced to partial fingers during quasi-static movement. From the result of the index finger, post-hoc tests revealed no significant differences in correlation coefficients among all pairs of conditions at the significance level 5%. On the other hand, from the result of the ring finger, post-hoc tests revealed a significant difference in correlation coefficients between adjacent fingers in contact and parted patterns at the significance level 5%. The results showed that pseudo-haptics’ effect could be diminished when adjacent fingers were in contact.
In Experiment 2, we examined the magnitude of the illusion when pseudo-haptics were applied during dynamic movement. As in Experiment 1, pseudo-haptics were applied to the right hand, and participants were asked to reproduce the perceived posture of the right hand with their left hand. From the result of the index finger, post-hoc tests revealed no significant differences in correlation coefficients among all pairs of conditions at the significance level 5%. However, from the result of the ring finger, post-hoc tests revealed a significant difference in the correlation coefficients between the adjacent finger closed and open conditions at the significance level 5%.Although a correlation trend was observed, it was not statistically significant. Furthermore, the magnitude of the change in movement due to pseudo-haptics was approximately three times greater during dynamic movement than during quasi-static movement, as shown by the vertical axis scale.
Finally, we investigated which finger participants felt discomfort in when changing the pseudo-haptics pattern during dynamic movement. When the C/D ratio was less than 1.0, the fingers with pseudo-haptics applied exhibited significantly higher discomfort ratios compared to other fingers. This trend was consistent in all patterns. Conversely, when the C/D ratio exceeded 1.0, discomfort levels increased across all fingers, with the most pronounced effect observed in fingers without pseudo-haptics. The results showed that participants tended to feel discomfort in fingers with relatively restricted movement compared to surrounding fingers.
These results indicate that, while applying partial pseudo-haptics to individual fingers can induce different sensations, the effect of pseudo-haptics can be diminished when adjacent fingers are in contact. Additionally, the change in movement due to pseudo-haptics is approximately three times larger during dynamic movement than in quasi-static movement. Furthermore, regardless of the presence of pseudo-haptics, participants tended to feel discomfort in areas with restricted movement. These findings suggest that the relative movement of fingers plays a crucial role in tactile perception and could provide valuable insights for designing diverse pseudo-haptic experiences.
In the future, we plan to investigate changes when the baseline condition or the hand movement performed is changed, as well as the effects on body parts such as both arms and both legs, which are not adjacent but are capable of the same movement. The aim is to provide design guidelines for applications such as force presentation using multi-degree-of-freedom pseudo-haptics effects.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}