
User Monitoring in Autonomous Driving System Using Gamified Task: A Case for VR/AR In-Car Gaming

 ,
,  ,
,
Abstract
:1. Introduction
1.1. Non-Driving Related Tasks (NDRT) and Driving-Related Tasks (DRT)
1.2. Related Works and Current State of Automation
1.3. Present Study
- Investigate how well the driver can recognize threatening driving scenarios while engaging in a game. This will be indicated by the time taken to press the designated button (recognition time) accurately.
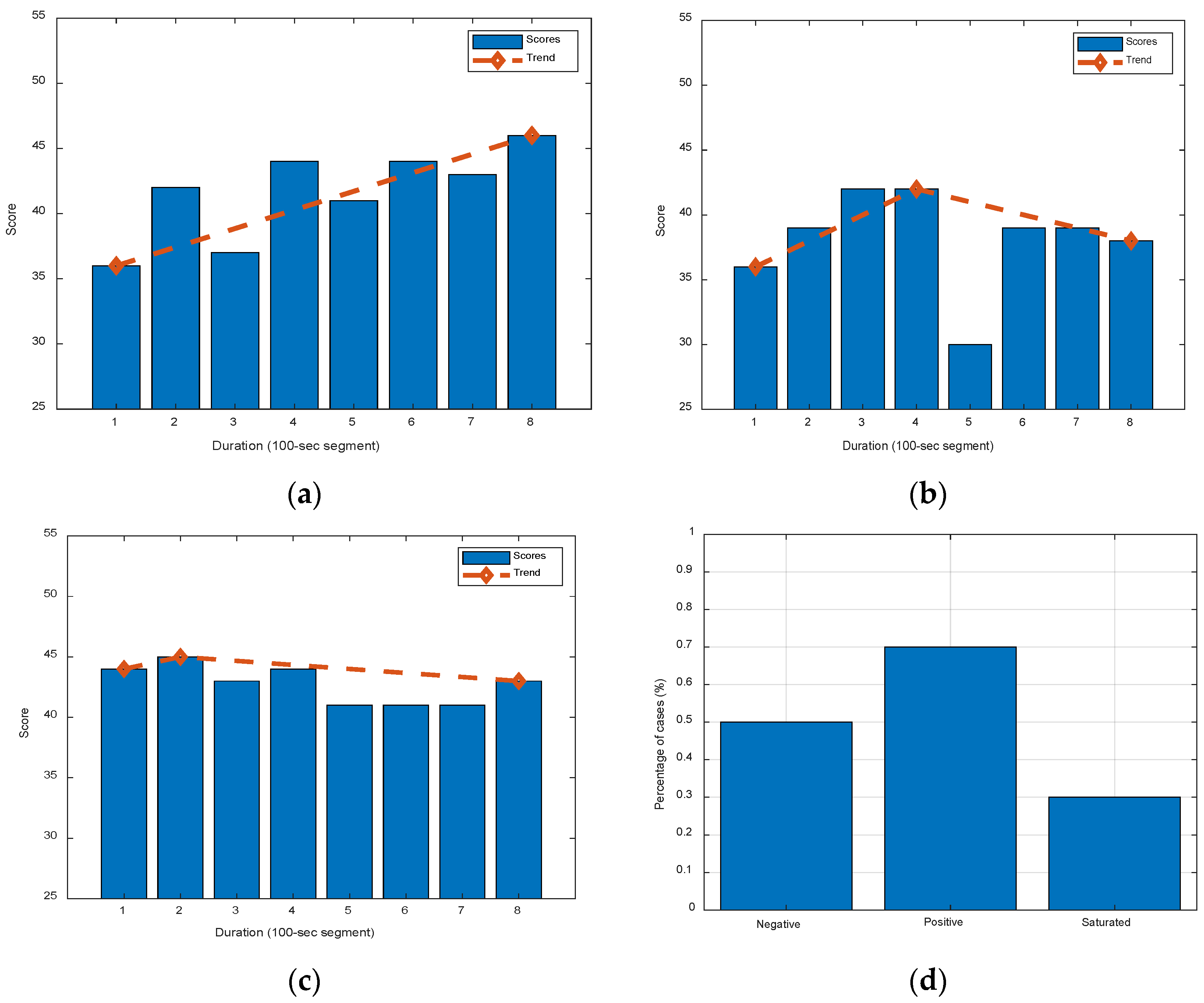
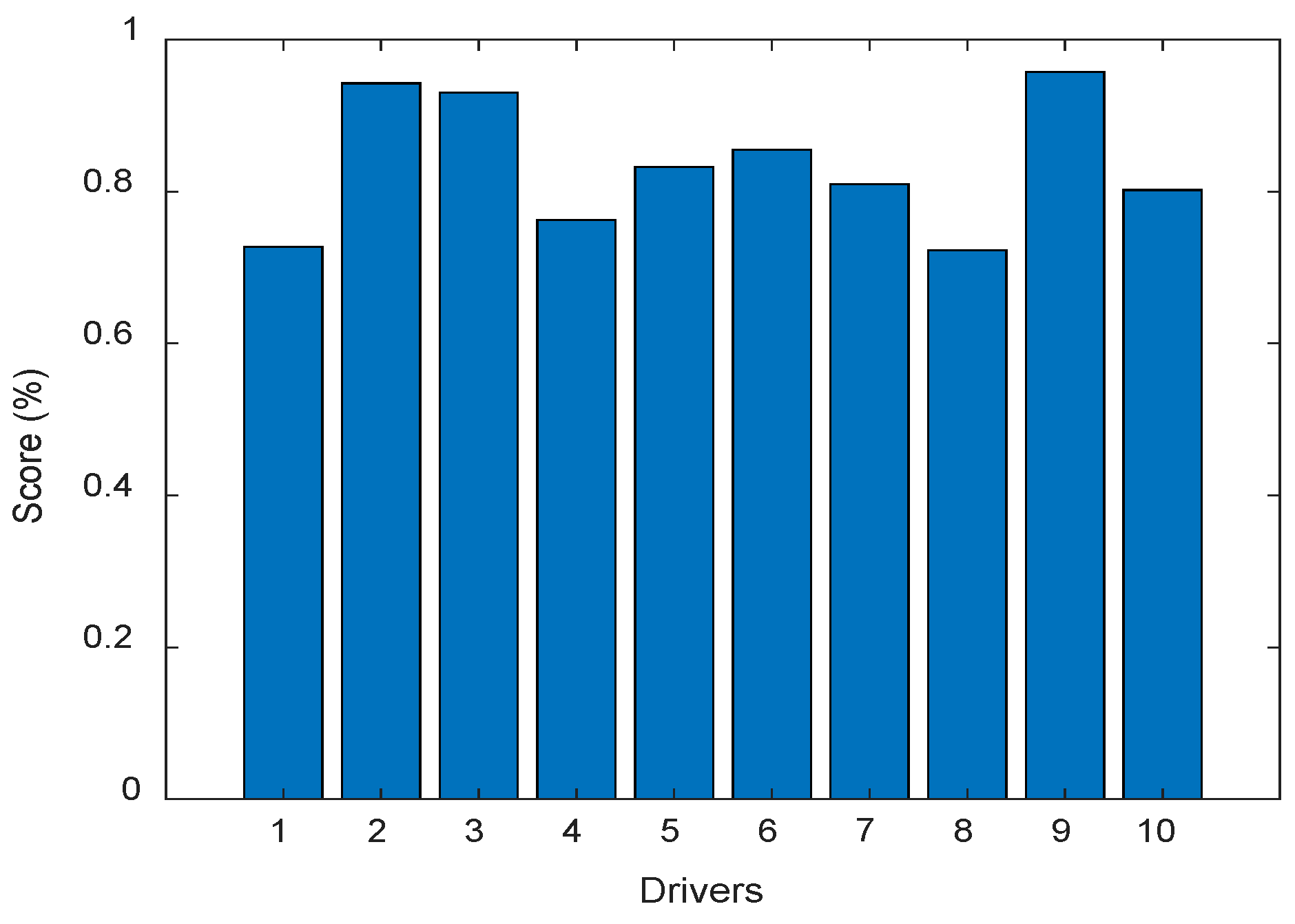
- Evaluate drivers’ engagement with the task using score profiles to make inferences on the drivers’ state. Game scores will be used as an indirect measure to infer engagement in the task and, by association, vigilance.
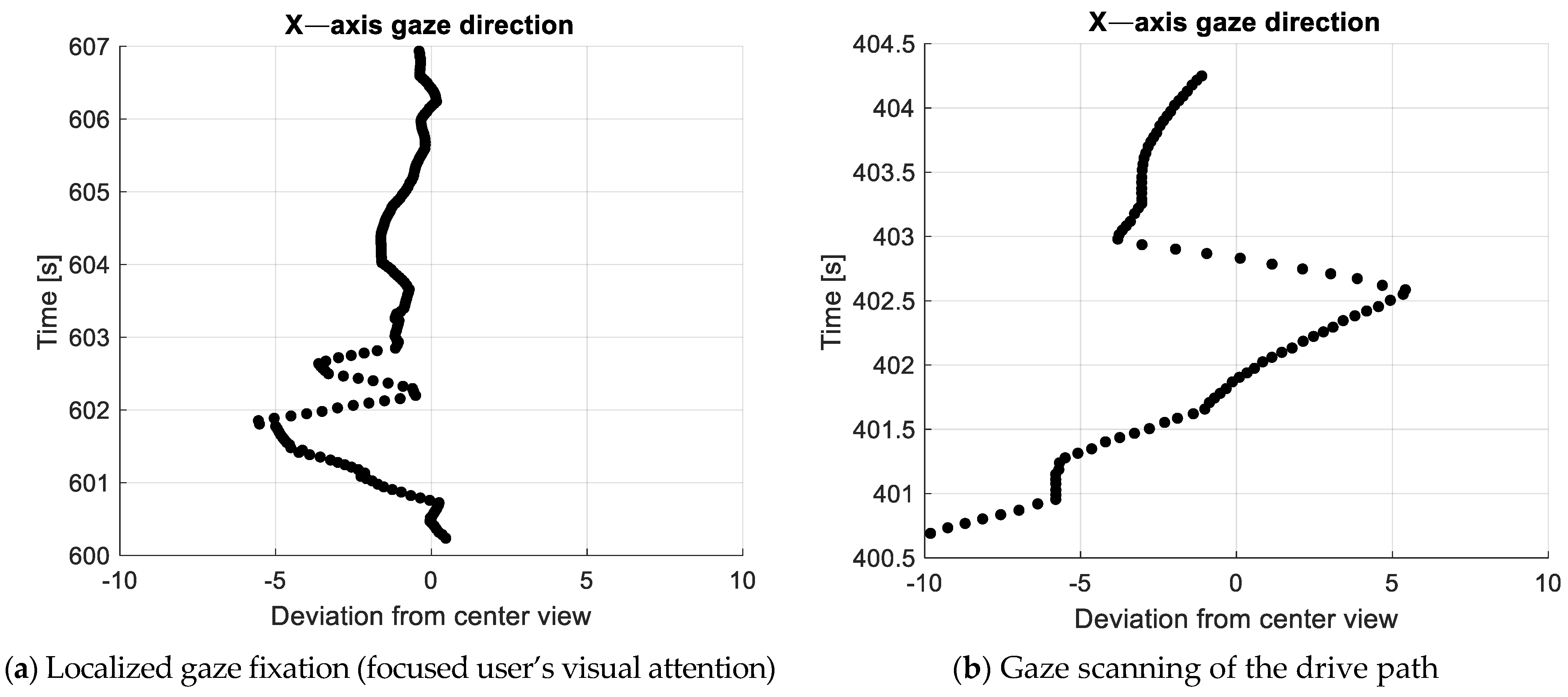
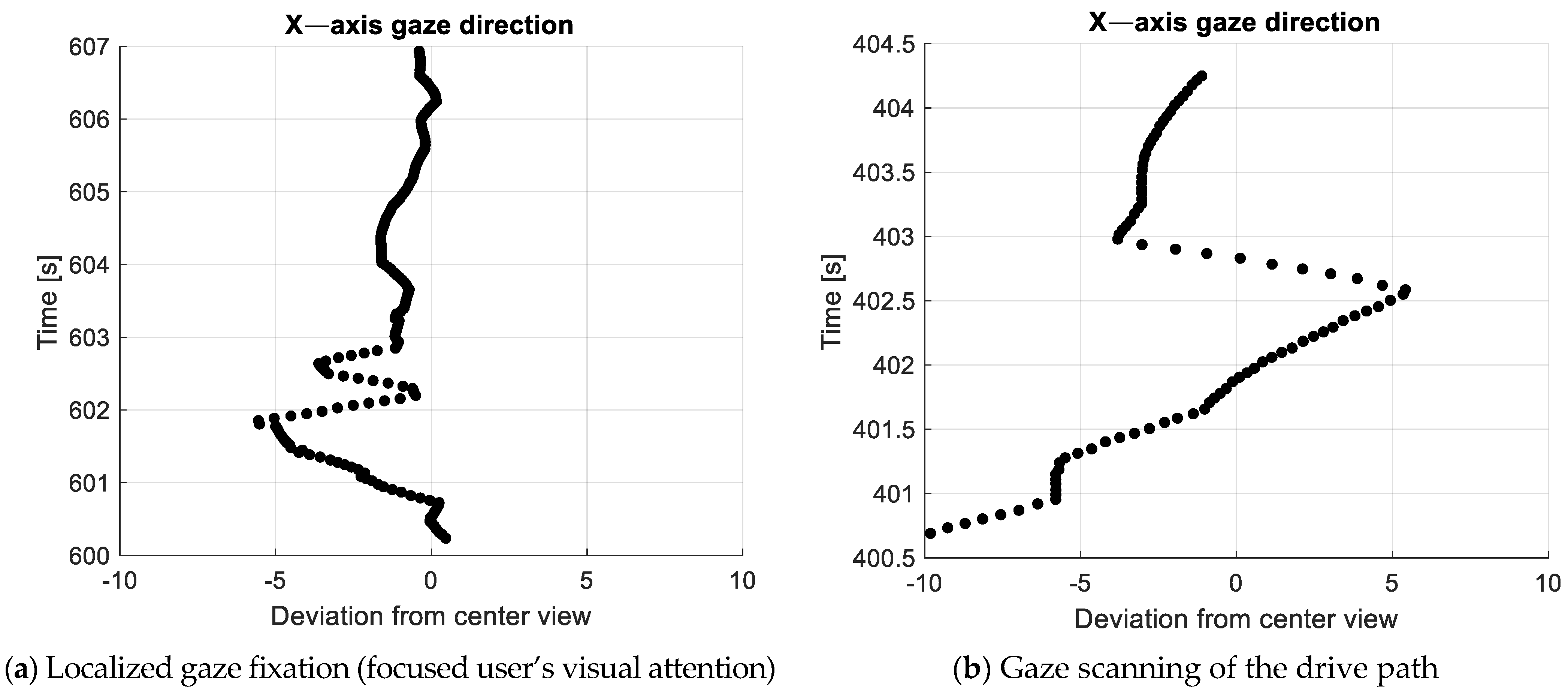
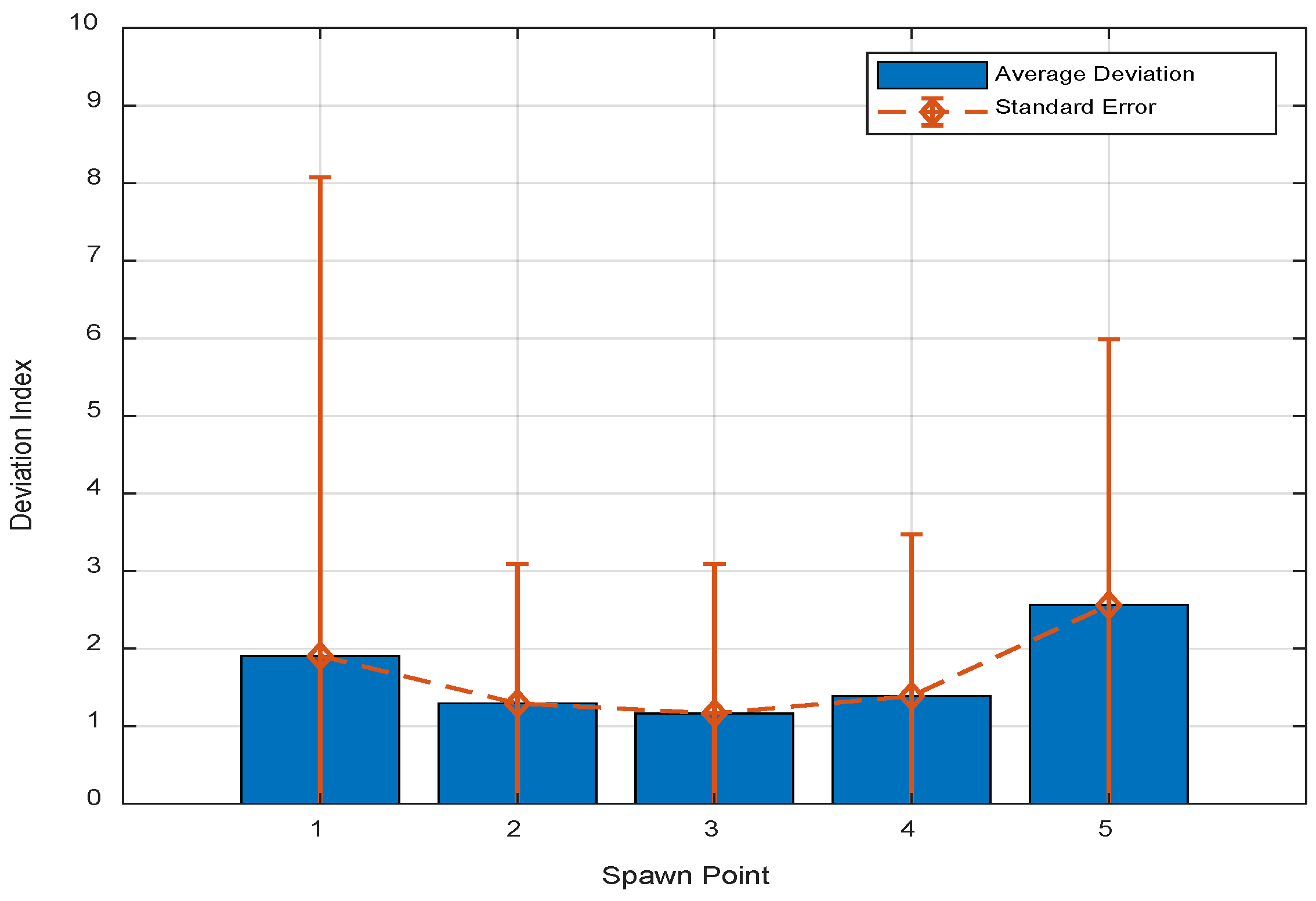
- Investigate driver’s interaction with the virtual environment. Based on the interaction model, the driver may be overly engrossed or disinterested in the task. Eye data will be utilized to identify trends in gaze behavior to confirm road monitoring. The gaze trends will be used as design recommendations for indirect monitoring systems.
2. Materials and Methods
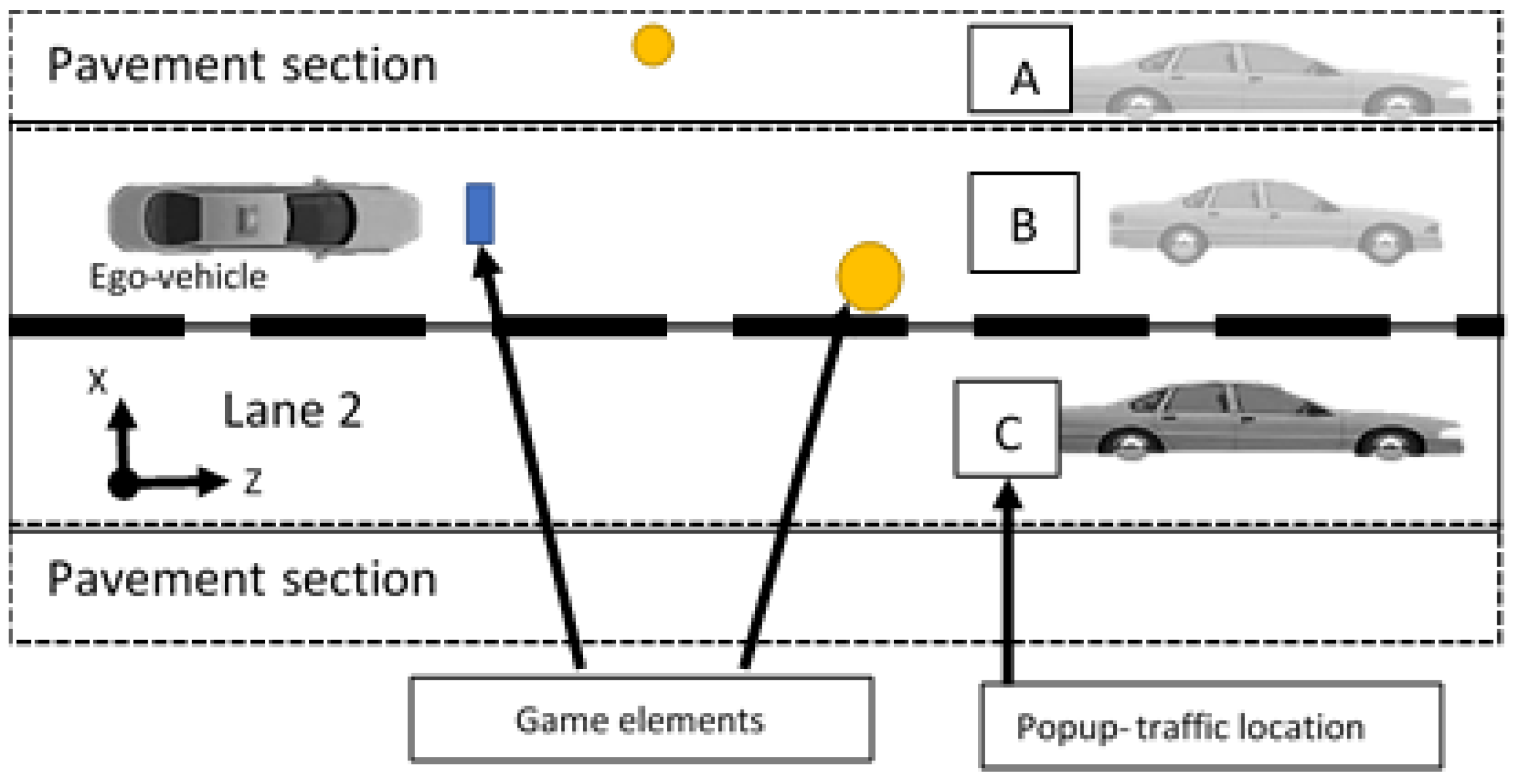
2.1. Driving Simulator
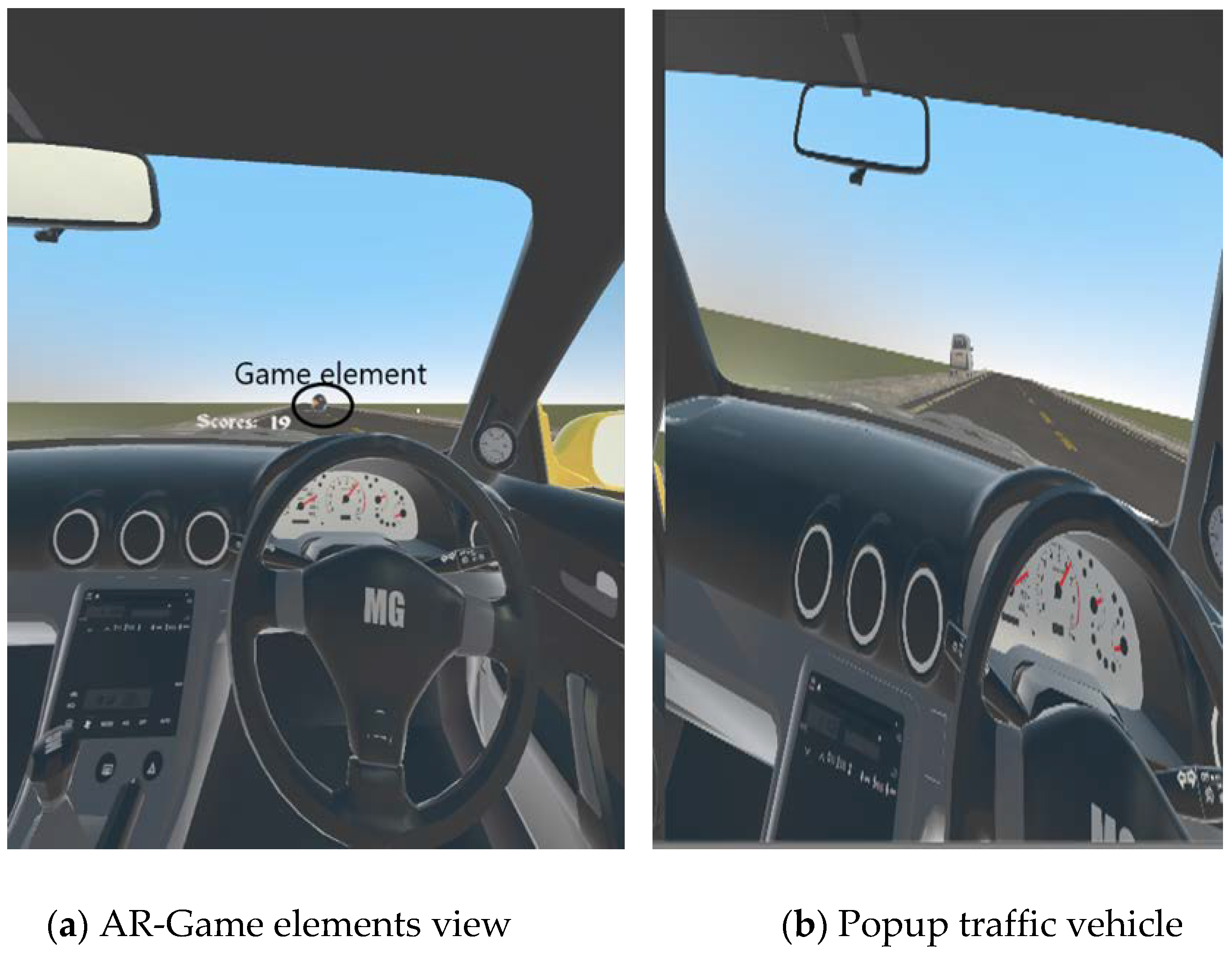
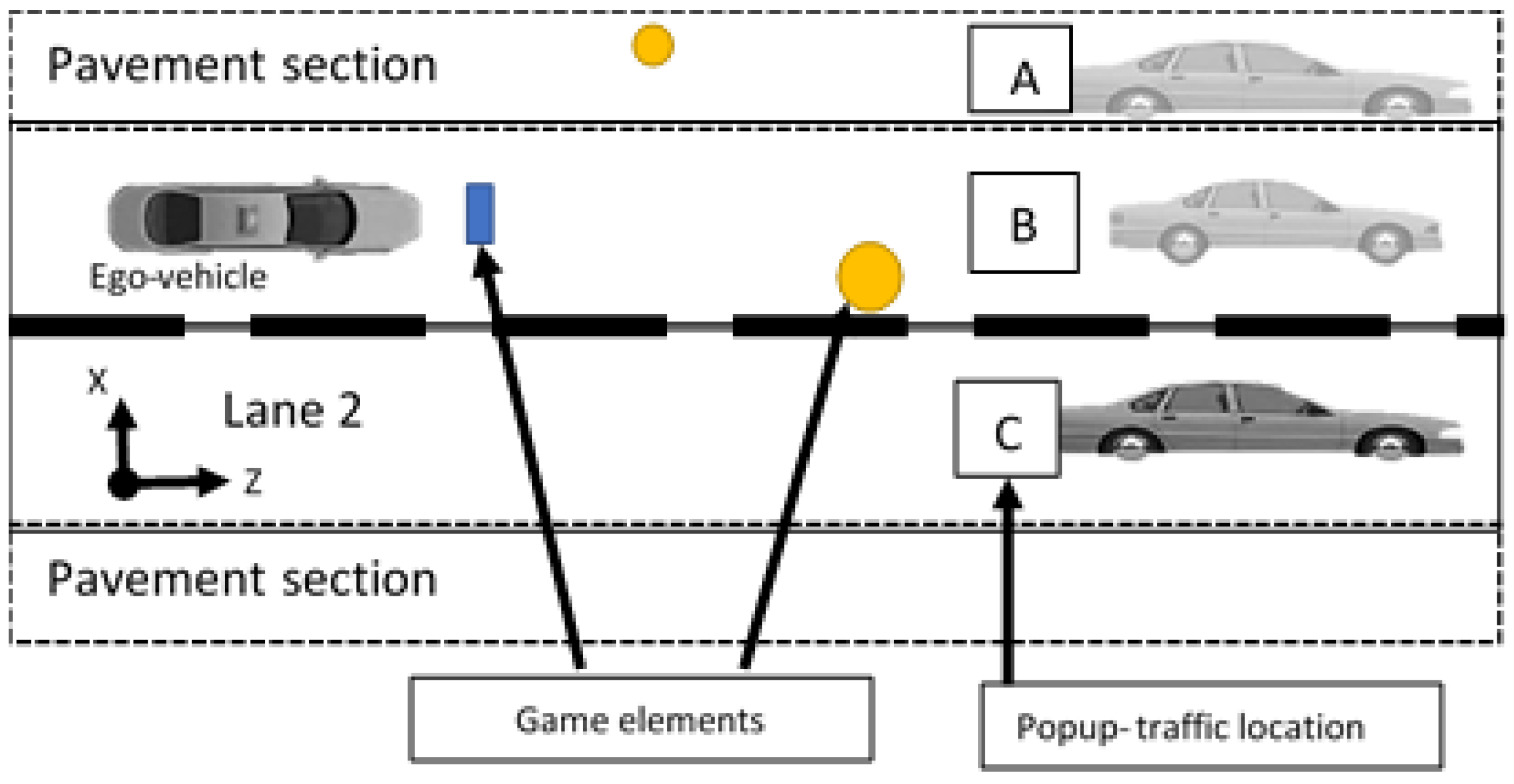
2.2. Game Mechanism Design
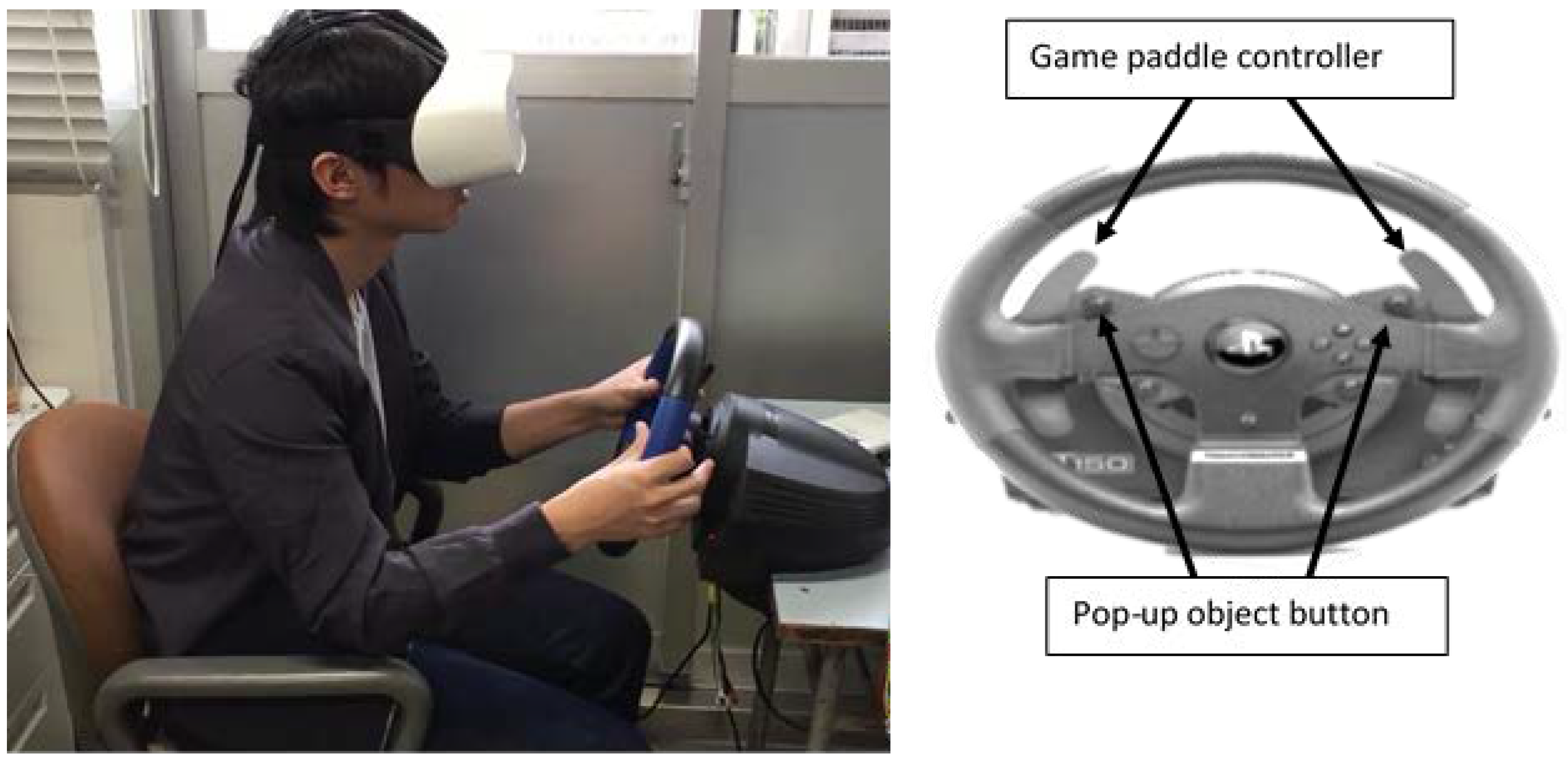
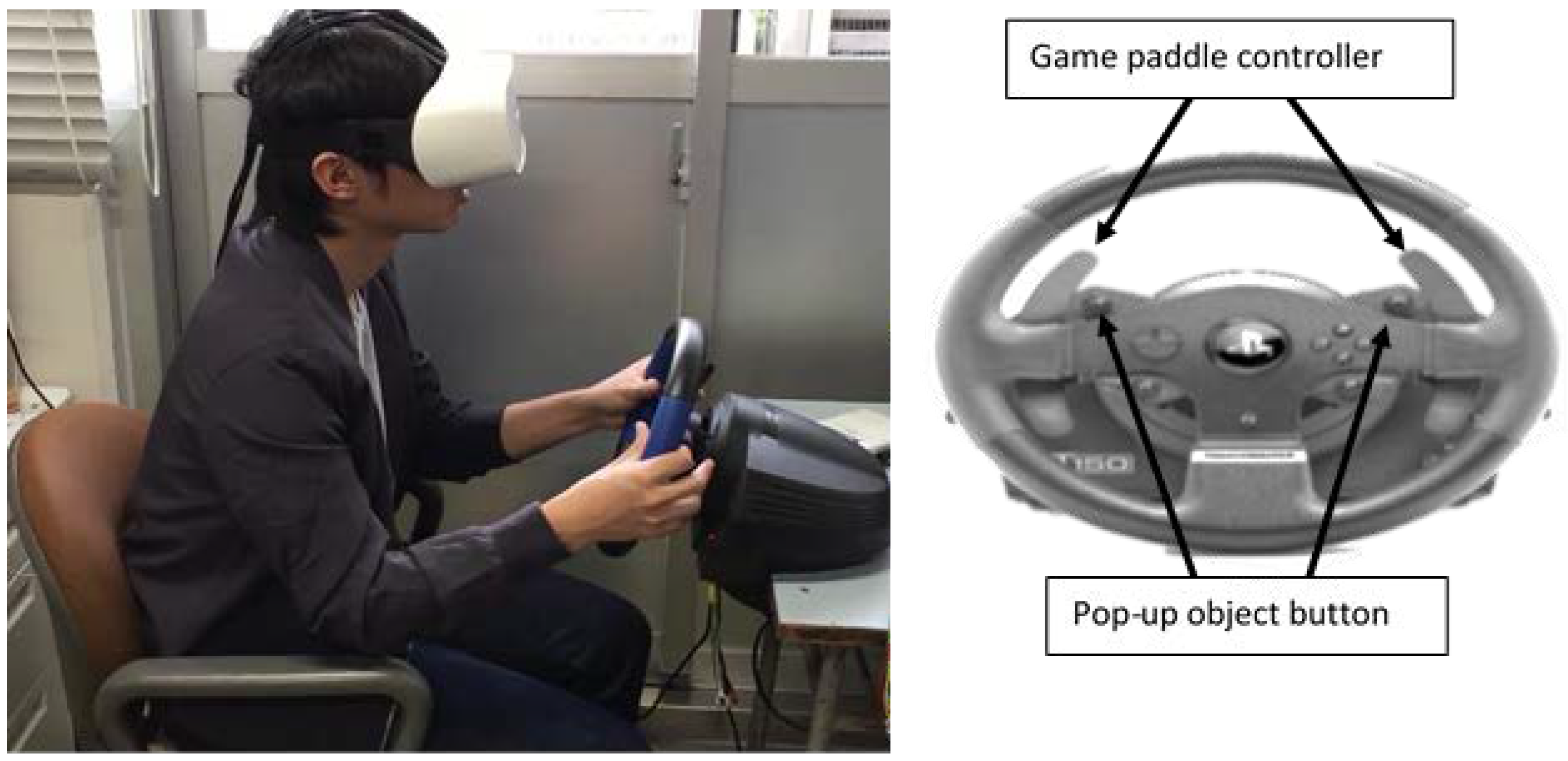
2.3. Experiment Setup
2.4. Participants
3. Results
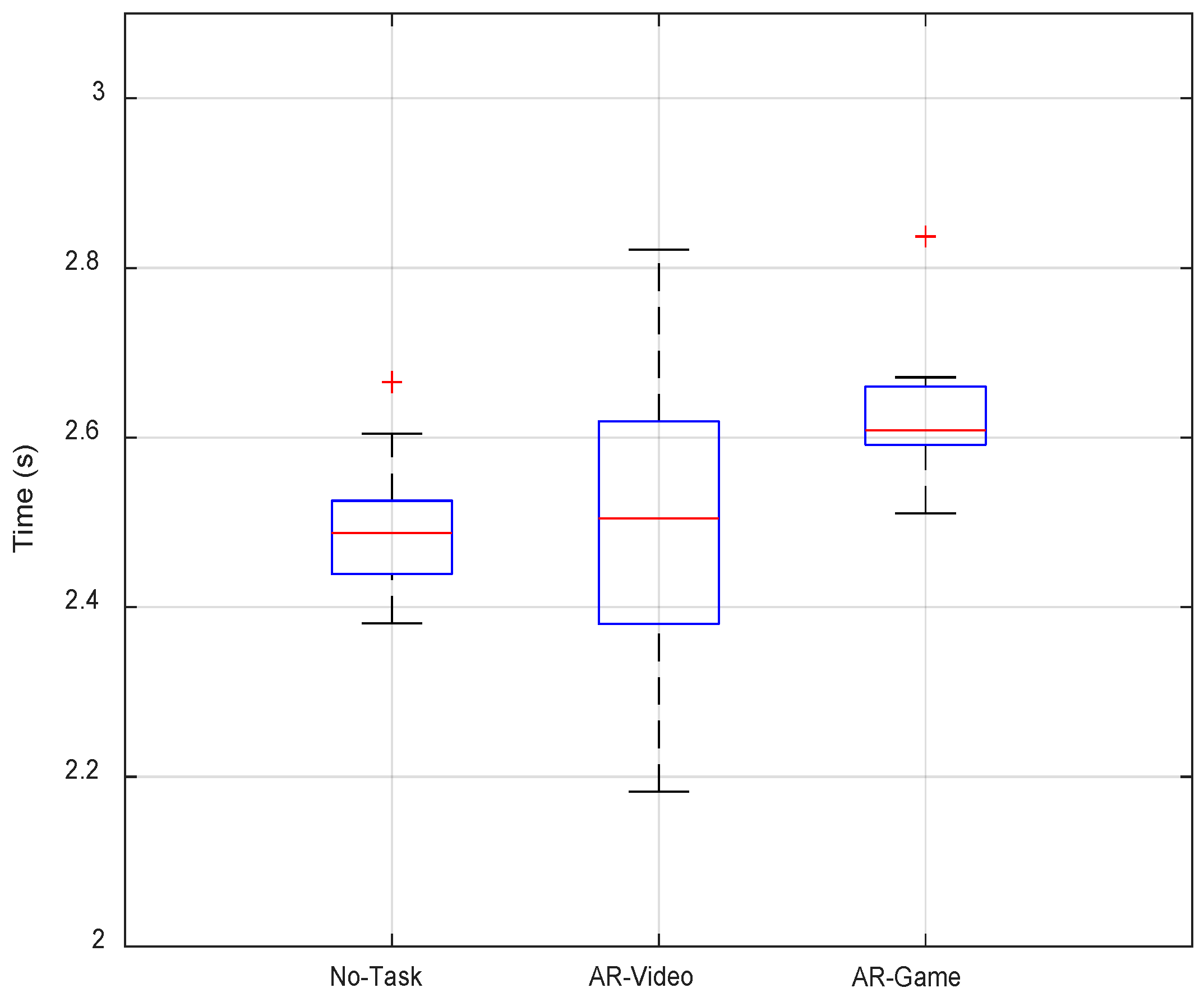
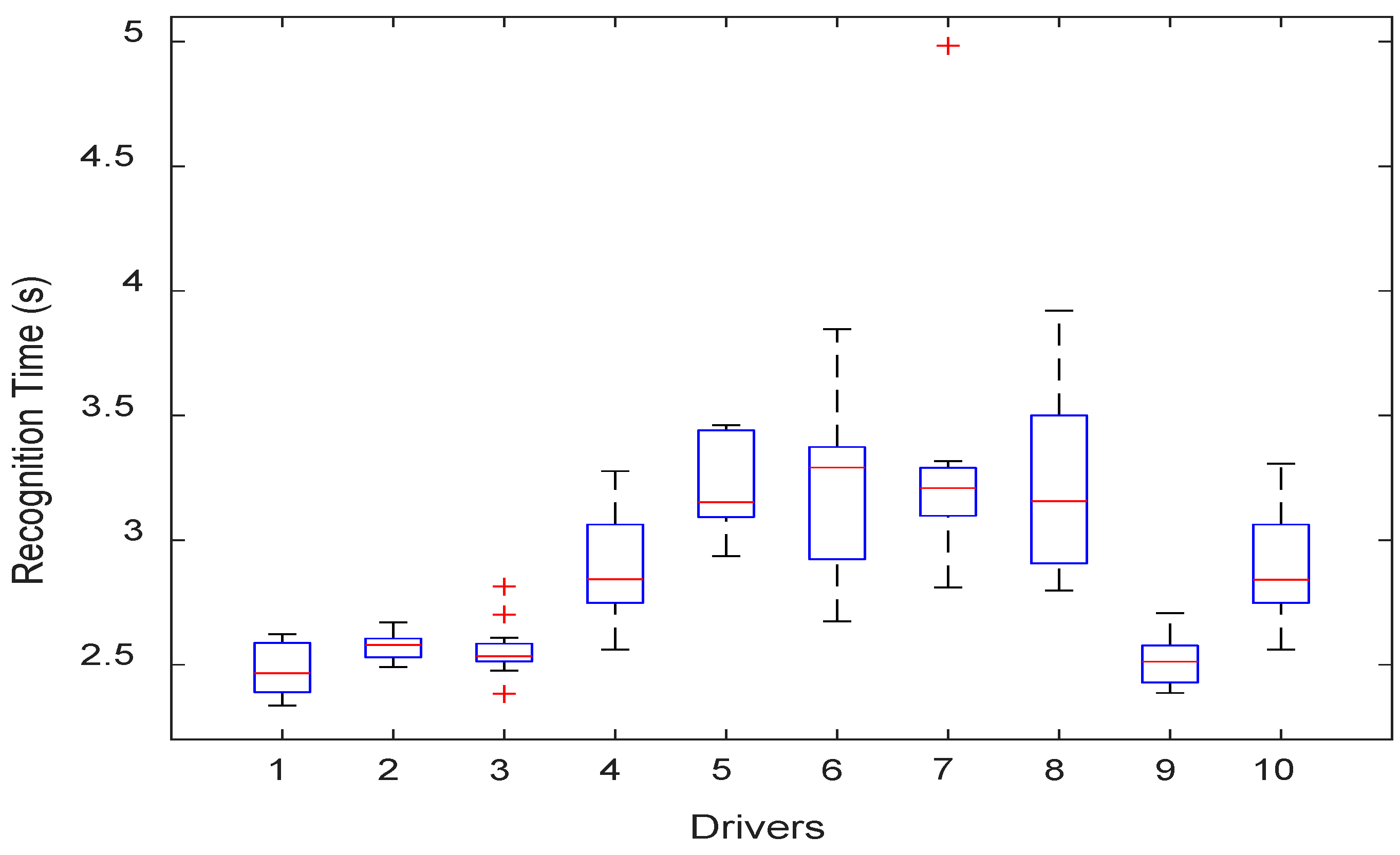
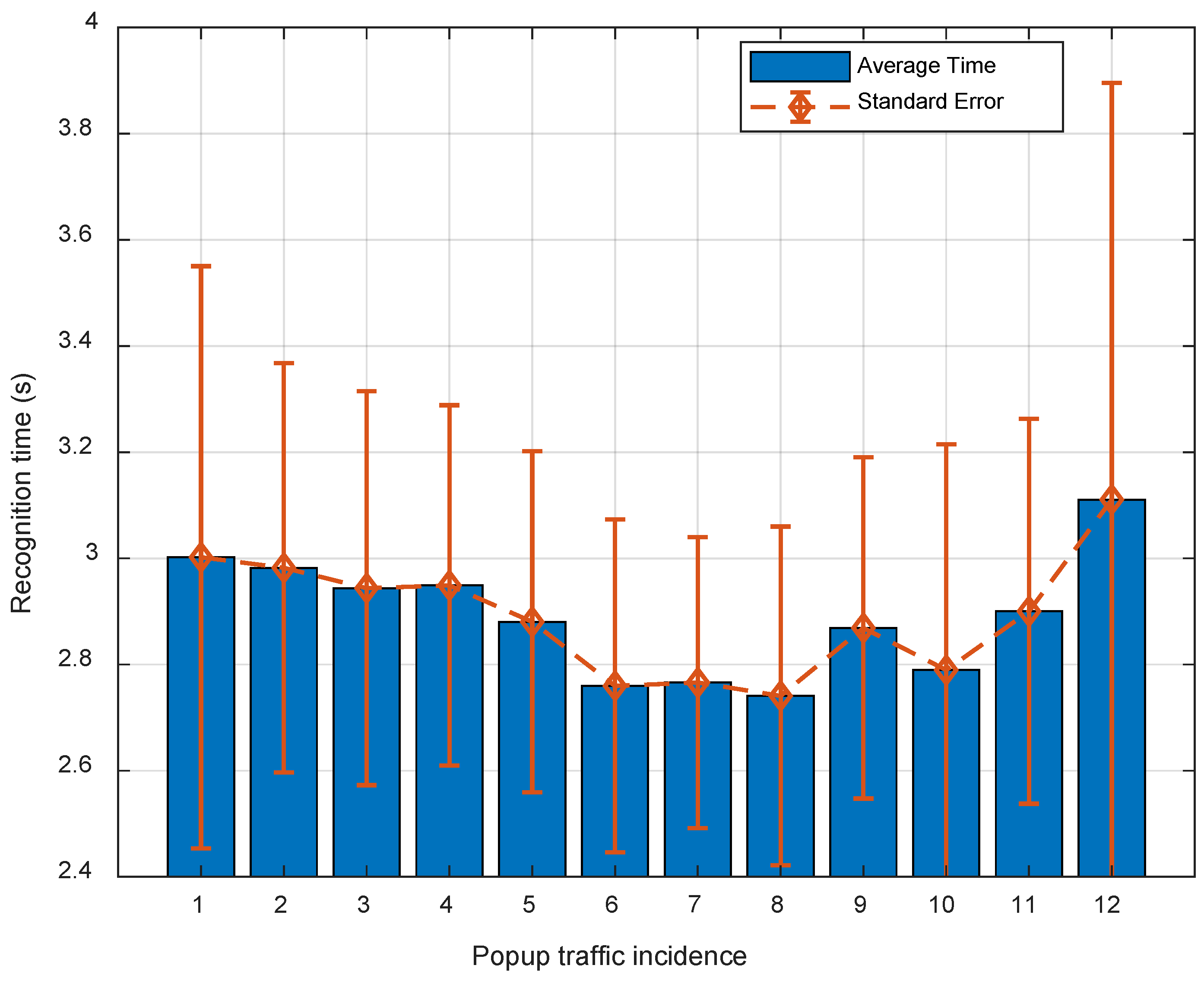
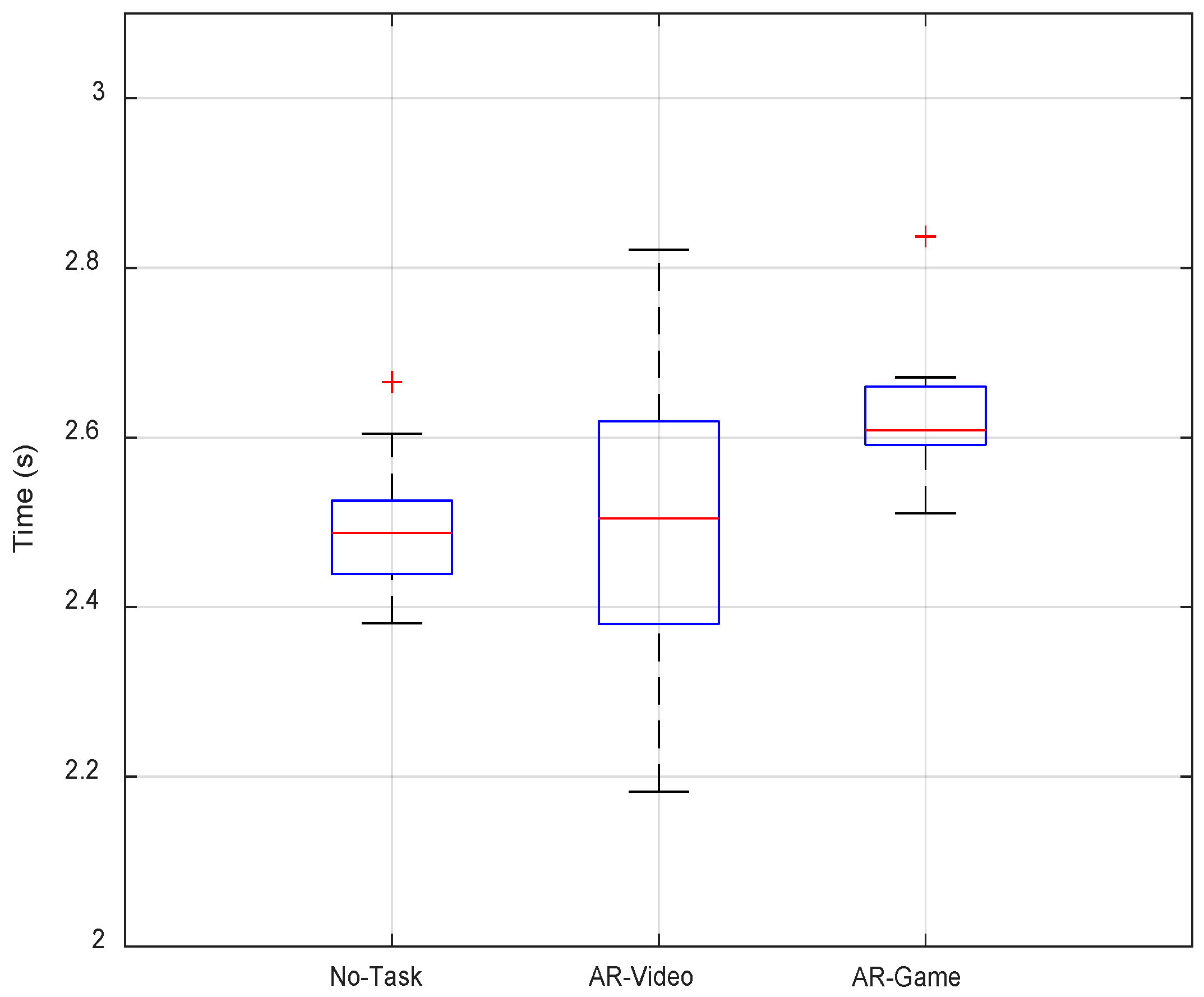
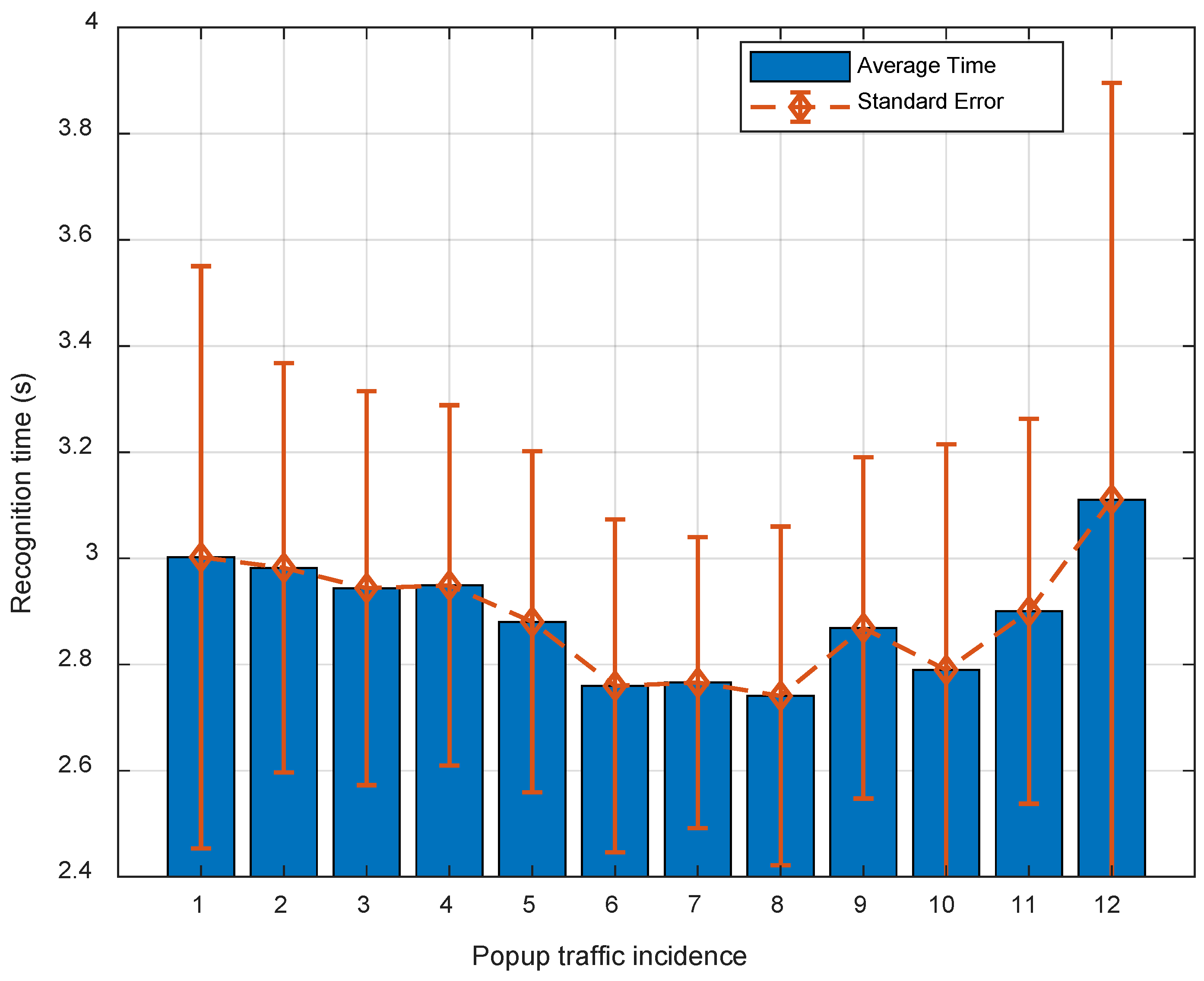
3.1. Recognition (Reaction) Time
3.1.1. Comparison of Tasks
3.1.2. Gaming Recognition Time
3.2. User Gaze Tracking
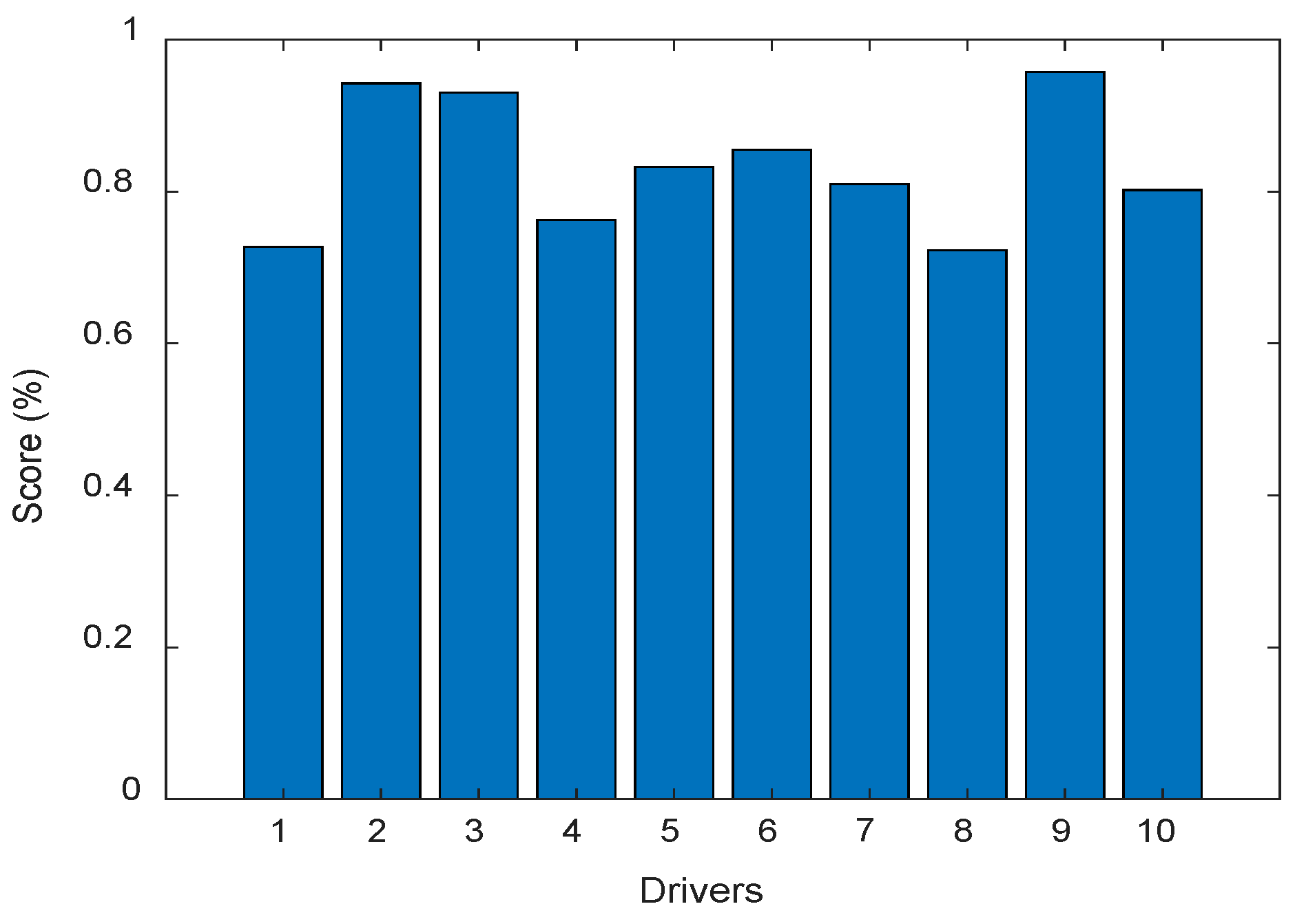
3.3. Score Profiles
3.3.1. Intercepted Objects Profile
3.3.2. Missed Objects Profile
4. Discussion
4.1. Recognition Time and Visual Search
4.2. Score Profile as an Engagement Model
4.3. Game and Design Consideration
4.4. Limitations and Future Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Anderson, J.M.; Kalra, N.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Brief History and Current State of Autonomous Vehicles. Auton. Veh. Technol. 2014, 55–74. [Google Scholar] [CrossRef]
- Jayaraman, S.K.; Creech, C.; Tilbury, D.M.; Yang, X.J.; Pradhan, A.K.; Tsui, K.M.; Robert, L.P.J. Pedestrian Trust in Automated Vehicles: Role of Traffic Signal and AV Driving Behavior. Front. Robot. AI 2019, 6, 117. [Google Scholar] [CrossRef] [Green Version]
- Standard, S. J3016B: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles-SAE International. 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 17 December 2020).
- Radlmayr, J.; Gold, C.; Lorenz, L.; Farid, M.; Bengler, K. How Traffic Situations and Non-Driving Related Tasks Affect the Take-Over Quality in Highly Automated Driving. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Diego, CA, USA, 27–31 October 2014; Volume 58, pp. 2063–2067. [Google Scholar] [CrossRef] [Green Version]
- Dingus, T.A.; Klauer, S.G.; Neale, V.L.; Petersen, A.; Lee, S.E.; Sudweeks, J.; Perez, M.A.; Hankey, J.; Ramsey, D.; Gupta, S.; et al. The 100-Car Naturalistic Driving Study: Phase II—Results of the 100-Car Field Experiment; PsycEXTRA Dataset; Department of Transportation. National Highway Traffic Safety Administration: Washington, DC, USA, 2006. [Google Scholar]
- Robbins, C.; Chapman, P. How does drivers’ visual search change as a function of experience? A systematic review and meta-analysis. Accid. Anal. Prev. 2019, 132, 105266. [Google Scholar] [CrossRef]
- Zeeb, K.; Buchner, A.; Schrauf, M. Is take-over time all that matters? The impact of visual-cognitive load on driver take-over quality after conditionally automated driving. Accid. Anal. Prev. 2016, 92, 230–239. [Google Scholar] [CrossRef] [PubMed]
- Lotz, A.; Russwinkel, N.; Wohlfarth, E. Response times and gaze behavior of truck drivers in time critical conditional automated driving take-overs. Transp. Res. Part F Traffic Psychol. Behav. 2019, 64, 532–551. [Google Scholar] [CrossRef]
- Miller, D.; Sun, A.; Johns, M.; Ive, H.; Sirkin, D.; Aich, S.; Ju, W. Distraction Becomes Engagement in Automated Driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2015, 59, 1676–1680. [Google Scholar] [CrossRef] [Green Version]
- Körber, M.; Cingel, A.; Zimmermann, M.; Bengler, K. Vigilance Decrement and Passive Fatigue Caused by Monotony in Automated Driving. Procedia Manuf. 2015, 3, 2403–2409. [Google Scholar] [CrossRef] [Green Version]
- Arakawa, T.; Hibi, R.; Fujishiro, T.-A. Psychophysical assessment of a driver’s mental state in autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 124, 587–610. [Google Scholar] [CrossRef]
- Vogelpohl, T.; Kühn, M.; Hummel, T.; Vollrath, M. Asleep at the automated wheel—Sleepiness and fatigue during highly automated driving. Accid. Anal. Prev. 2019, 126, 70–84. [Google Scholar] [CrossRef]
- Morris, E.A.; Guerra, E. Are we there yet? Trip duration and mood during travel. Transp. Res. Part F Traffic Psychol. Behav. 2015, 33, 38–47. [Google Scholar] [CrossRef]
- Malokin, A.; Circella, G.; Mokhtarian, P.L. How do activities conducted while commuting influence mode choice? Using revealed preference models to inform public transportation advantage and autonomous vehicle scenarios. Transp. Res. Part A Policy Pract. 2019, 124, 82–114. [Google Scholar] [CrossRef]
- Steinberger, F.; Schroeter, R.; Watling, C. From road distraction to safe driving: Evaluating the effects of boredom and gamification on driving behaviour, physiological arousal, and subjective experience. Comput. Hum. Behav. 2017, 75, 714–726. [Google Scholar] [CrossRef] [Green Version]
- Happee, R.; Gold, C.; Radlmayr, J.; Hergeth, S.; Bengler, K. Take-over performance in evasive manoeuvres. Accid. Anal. Prev. 2017, 106, 211–222. [Google Scholar] [CrossRef] [PubMed]
- Lakier, M.; Nacke, L.E.; Igarashi, T.; Vogel, D. Cross-Car, Multiplayer Games for Semi-Autonomous Driving. In Proceedings of the Annual Symposium on Computer-Human Interaction in Play, Barcelona, Spain, 22–25 October 2019; pp. 467–480. [Google Scholar]
- Broy, N.; Goebl, S.; Hauder, M.; Kothmayr, T.; Kugler, M.; Reinhart, F.; Salfer, M.; Schlieper, K.; André, E. A cooperative in-car game for heterogeneous players. In Proceedings of the 3rd International Conference on Intelligent Information Processing, Salzburg, Austria, 30 November 2011; pp. 167–176. [Google Scholar]
- Paredes, P.E.; Balters, S.; Qian, K.; Murnane, E.L.; Ordóñez, F.; Ju, W.; Landay, J.A. Driving with the Fishes. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 1–21. [Google Scholar] [CrossRef]
- Hock, P.; Benedikter, S.; Gugenheimer, J.; Rukzio, E. Carvr: Enabling in-car virtual reality entertainment. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 4034–4044. [Google Scholar]
- Iskander, J.; Attia, M.H.; Saleh, K.; Nahavandi, D.; Abobakr, A.; Mohamed, S.; Asadi, H.; Khosravi, A.; Lim, C.P.; Hossny, M. From car sickness to autonomous car sickness: A review. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 716–726. [Google Scholar] [CrossRef]
- McGill, M.; Ng, A.; Brewster, S. I am the passenger: How visual motion cues can influence sickness for in-car VR. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017. [Google Scholar]
- Audi, Holoride: Virtual Reality Meets the Real World|audi.com. 2019. Available online: https://www.audi.com/en/experience-audi/mobility-and-trends/digitalization/holoride-virtual-reality-meets-the-real-world.html (accessed on 17 December 2020).
- Genty, E. Renault SYMBIOZ Demo Car: Technologies for Traveling Well-Being—Groupe Renault. 2017. Available online: https://group.renault.com/en/news-on-air/news/renault-symbioz-demo-car-technologies-for-traveling-well-being/ (accessed on 18 December 2020).
- Brunnberg, L.; Juhlin, O.; Gustafsson, A. Games for passengers. In Proceedings of the 4th International Conference on Movement Computing, London, UK, 28–30 June 2017; pp. 26–33. [Google Scholar]
- Matsumura, K.; Kirk, D.S. On Active Passengering. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 1, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Zuckerman, O.; Hoffman, G.; Gal-Oz, A. In-car game design for children: Promoting interactions inside and outside the car. Int. J. Child-Comput. Interact. 2014, 2, 109–119. [Google Scholar] [CrossRef]
- Statt, N. Tesla Arcade Hands-On: Using a Model 3 Steering Wheel as a Game Controller—The Verge. 2019. Available online: https://www.theverge.com/2019/6/18/18684297/tesla-arcade-model-3-hands-on-beach-buggy-racing-2-demo-electric-cars (accessed on 17 December 2020).
- Schrader, S. The New Mercedes-Benz CLA Lets You Play Mario Kart on Its Infotainment Screen. 2019. Available online: https://www.thedrive.com/news/26761/the-new-mercedes-benz-cla-lets-you-play-mario-kart-on-its-infotainment-screen (accessed on 17 December 2020).
- Tassi, P. Nintendo Forms Unusual Partnership with Mercedes for ‘Mario Kart 8′ DLC. 2014. Available online: https://www.forbes.com/sites/insertcoin/2014/05/29/nintendo-forms-unusual-partnership-with-mercedes-for-mario-kart-8-dlc/?sh=4836785b1a67 (accessed on 17 December 2020).
- CNN. Amazon’s Zoox Reveals Its Robotaxi—CNN, CNN News. 2020. Available online: https://edition.cnn.com/2020/12/14/cars/zoox-amazon-robotaxi/index.html (accessed on 17 December 2020).
- GM. Chevrolet EN-V 2.0 Vehicle Sharing Pilot Program Concludes, GM Corporate Newsroom. 2017. Available online: https://media.gm.com/media/cn/en/gm/news.detail.html/content/Pages/news/cn/en/2017/May/0505_Chevrolet-EN-V.html (accessed on 17 December 2020).
- McGill, M.; Williamson, J.; Ng, A.; Pollick, F.; Brewster, S. Challenges in passenger use of mixed reality headsets in cars and other transportation. Virtual Real. 2020, 24, 583–603. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wang, Z.; Mazumdar, A.; Mousas, C. Virtual reality game level layout design for real environment constraints. Graph. Vis. Comput. 2021, 4, 200020. [Google Scholar] [CrossRef]
- Müller, A.L.; Fernandes-Estrela, N.; Hetfleisch, R.; Zecha, L.; Abendroth, B. Effects of non-driving related tasks on mental workload and take-over times during conditional automated driving. Eur. Transp. Res. Rev. 2021, 13, 1–15. [Google Scholar] [CrossRef]
- Vlakveld, W.; van Nes, N.; de Bruin, J.; Vissers, L.; van der Kroft, M. Situation awareness increases when drivers have more time to take over the wheel in a Level 3 automated car: A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 917–929. [Google Scholar] [CrossRef]
- Lindemann, P.; Muller, N.; Rigolll, G. Exploring the Use of Augmented Reality Interfaces for Driver Assistance in Short-Notice Takeovers. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 804–809. [Google Scholar]
- Lindemann, P.; Lee, T.-Y.; Rigoll, G. Supporting Driver Situation Awareness for Autonomous Urban Driving with an Augmented-Reality Windshield Display. In Proceedings of the 2018 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Munich, Germany, 16–20 October 2018; pp. 358–363. [Google Scholar] [CrossRef]
- Lin, R.; Ma, L.; Zhang, W. An interview study exploring Tesla drivers’ behavioural adaptation. Appl. Ergon. 2018, 72, 37–47. [Google Scholar] [CrossRef]
- BBCNews. Tesla in Fatal California Crash Was on Autopilot—BBC News. 2018. Available online: https://www.bbc.com/news/world-us-canada-43604440 (accessed on 17 December 2020).
- Lubben, A. Self-Driving Uber Killed a Pedestrian as Human Safety Driver Watched. 2018. Available online: https://www.vice.com/en/article/kzxq3y/self-driving-uber-killed-a-pedestrian-as-human-safety-driver-watched (accessed on 17 December 2020).
- Cohen, S.A.; Hopkins, D. Autonomous vehicles and the future of urban tourism. Ann. Tour. Res. 2019, 74, 33–42. [Google Scholar] [CrossRef]
- Wang, L.; Bie, Y.; Li, S. The impact of roadside landscape colors on driver’s mean heart rate considering driving time. Transp. Res. Part F Traffic Psychol. Behav. 2016, 42, 151–161. [Google Scholar] [CrossRef]
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Straub, E.R.; Schaefer, K.E. It takes two to Tango: Automated vehicles and human beings do the dance of driving—Four social considerations for policy. Transp. Res. Part A Policy Pract. 2019, 122, 173–183. [Google Scholar] [CrossRef]
- Strauch, C.; Mühl, K.; Patro, K.; Grabmaier, C.; Reithinger, S.; Baumann, M.; Huckauf, A. Real autonomous driving from a passenger’s perspective: Two experimental investigations using gaze behaviour and trust ratings in field and simulator. Transp. Res. Part F: Traffic Psychol. Behav. 2019, 66, 15–28. [Google Scholar] [CrossRef]
- Louw, T.; Merat, N. Are you in the loop? Using gaze dispersion to understand driver visual attention during vehicle automation. Transp. Res. Part C Emerg. Technol. 2017, 76, 35–50. [Google Scholar] [CrossRef]
- Feldhütter, A.; Gold, C.; Schneider, S.; Bengler, K. How the Duration of Automated Driving Influences Take-Over Perfor-mance and Gaze Behavior. In Advances in Ergonomic Design of Systems, Products and Processes; Springer: Berlin/Heidelberg, Germany, 2017; pp. 309–318. [Google Scholar] [CrossRef]
- Peillard, E.; Thebaud, T.; Normand, J.-M.; Argelaguet, F.; Moreau, G.; Lecuyer, A.; Norrnand, J.-M. Virtual Objects Look Farther on the Sides: The Anisotropy of Distance Perception in Virtual Reality. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 227–236. [Google Scholar]
- Eghbali, P.; Väänänen, K.; Jokela, T. Social acceptability of virtual reality in public spaces: Experiential factors and design recom-mendations. In Proceedings of the 18th International Conference on Mobile and Ubiquitous Multimedia, Pisa, Italy, 26–29 November 2019. [Google Scholar]
- Li, J.; George, C.; Ngao, A.; Holländer, K.; Mayer, S.; Butz, A. Rear-Seat Productivity in Virtual Reality: Investigating VR Interaction in the Confined Space of a Car. Multimodal Technol. Interact. 2021, 5, 15. [Google Scholar] [CrossRef]
- Wada, T.; Fujisawa, S.; Imaizumi, K.; Kamiji, N.; Doi, S. Effect of Driver’s Head Tilt Strategy on Motion Sickness Incidence. IFAC Proc. Vol. 2010, 43, 192–197. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Engagement Status | Description |
|---|---|---|
| 0 | Monitoring state | No distractions The challenge with this level is that it is hard to maintain a non-distracted status for an extended period due to monotony in ADS. |
| 1 | ADS Managed Tasks | The driver engages with tasks like watching movies, games, etc., that are managed by the ADS system. This gives the advantage of the ease of passing relevant drive information and an indirect driver monitoring system. |
| 2 | External Devices Tasks | The driver engages with tasks with connected devices (smartphones, tablets, etc.). This allows for active sharing of relevant information |
| 3 | Passive State | The driver engages with tasks unrecognized by the system. This covers all tasks, including unconnected devices and naps. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muguro, J.K.; Laksono, P.W.; Sasatake, Y.; Matsushita, K.; Sasaki, M. User Monitoring in Autonomous Driving System Using Gamified Task: A Case for VR/AR In-Car Gaming. Multimodal Technol. Interact. 2021, 5, 40. https://doi.org/10.3390/mti5080040
Muguro JK, Laksono PW, Sasatake Y, Matsushita K, Sasaki M. User Monitoring in Autonomous Driving System Using Gamified Task: A Case for VR/AR In-Car Gaming. Multimodal Technologies and Interaction. 2021; 5(8):40. https://doi.org/10.3390/mti5080040
Chicago/Turabian StyleMuguro, Joseph K., Pringgo Widyo Laksono, Yuta Sasatake, Kojiro Matsushita, and Minoru Sasaki. 2021. "User Monitoring in Autonomous Driving System Using Gamified Task: A Case for VR/AR In-Car Gaming" Multimodal Technologies and Interaction 5, no. 8: 40. https://doi.org/10.3390/mti5080040
APA StyleMuguro, J. K., Laksono, P. W., Sasatake, Y., Matsushita, K., & Sasaki, M. (2021). User Monitoring in Autonomous Driving System Using Gamified Task: A Case for VR/AR In-Car Gaming. Multimodal Technologies and Interaction, 5(8), 40. https://doi.org/10.3390/mti5080040