Abstract
This study examines the effect of a COVID-19 Officer Robot (COR) on passersby compliance and the effects of its minor design manipulations on human–robot interaction. A robotic application was developed to ensure participants entering a public building comply with COVID restrictions of a green pass and wearing a face mask. The participants’ attitudes toward the robot and their perception of its authoritativeness were explored with video and questionnaires data. Thematic analysis was used to define unique behaviors related to human–COR interaction. Direct and extended interactions with minor design manipulation of the COR were evaluated in a public scenario setting. The results demonstrate that even minor design manipulations may influence users’ attitudes toward officer robots. The outcomes of this research can support manufacturers in rapidly adjusting their robots to new domains and tasks and guide future designs of authoritative socially assistive robots (SARs).
1. Introduction
The COVID-19 crisis has affected many social and economic aspects of human lives worldwide. This new reality points towards a growing need for socially assistive robots (SAR) in various contexts, functions, and users [1]. During lockdowns, people chose or were directed to stay home except for essential activities. As a result, the demand for SARs grew by 44% in 2019 and continues to grow (IFR, 2020) [2]. In the para-medical field, SARs can significantly reduce the risk of infectious disease transmission to medical professionals by allowing them to remotely diagnose, monitor, and treat patients [3]. For example, a robotic arm can be used to measure the lung condition of a contiguous patients [4] or a telerobotic system can be used for remote care operation in isolation wards [5]. In the domestic arena, SARs can be beneficial for sustaining social distancing, monitoring, and improving mental health, and supporting distance education and training [6].
The pandemic affected the labor market by accelerating and strengthening ongoing trends in remote work, e-commerce, and the shift toward using robots and automation as labor-saving production techniques [7,8]. As a result, there was a temporal reduction or disappearance of some occupations (e.g., restaurants and tourism industry) and growth in others (e.g., deliveries, parcel handling, or essential healthcare workers). Furthermore, in response to evolving needs, new jobs were created; COVID-19 testers, contact tracers, social distancing monitors, temperature screeners, and sanitizers [9,10]. SARs may provide an alternative way to cope with these evolving needs, especially because recruiting and training new workers in a hurry is challenging.
Matching a SAR’s physical form and appearance to its task and capabilities can help people understand its nature and improve users’ acceptance [11,12]. Studies have shown that appearance influences user attitude and perception of a robot’s characteristics [13,14,15]. A robot’s visual qualities such as figure, abstraction level, body structure, material, edge type, and color significantly affect users’ perception and must be part of the design of new robots [16,17,18,19]. Still, when a new application is introduced, there is not always time to develop the whole embodiment. Hence, new applications are mostly implemented in existing robots, leaving the designer with the option of minor manipulations only. Typically, studies investigating the effect of design manipulations on human perception deal with dressing up an existing robot with human clothes, referring to the robot’s human likeness [20,21].
Following the Israeli Ministry of Health guidelines, from April to July 2021 (and effective October 2021), university campuses were permitted only for those with a green pass [22]. In addition, entry to any building on campus required wearing a mask. To enforce these restrictions, more security guards were necessary. This study investigated the effect of using a social robot to act as an officer robot (COR) on passersby compliance around the university campus, enforcing the ministry of health’s restrictions—further, we examined the effect of two minor design manipulations on users’ behaviors and perceptions. Three research hypotheses were formulated and are detailed below.
Hypothesis 1.
Using robots as COVID-19 officers may be beneficial to raise awareness of the restrictions and achieve passersby compliance, as the COR serves as a reminder. Previous studies demonstrated that robots could successfully monitor and keep humans’ social distance [23,24] and encourage pedestrians to use hand sanitizers [25,26]. Although at least in one case, using social robots appeared to have undesired results, promoting pedestrians to gather and collectively interact with a robot designed to encourage social distancing [27].
Hypothesis 2a.
The visual appearance of the COR affects users’ compliance. Previous studies investigated the effect of the robot’s anthropomorphism on users’ compliance [28,29]. This study aims to assess the impact of minor design manipulations on a non-humanlike robot.
Hypothesis 2b.
Adding red and blue flashing lights to the COR would increase passersby compliance. We assumed that red and blue flashing lights would draw more attention to the robot and improve its deterrence, as it may connote police lights. This assumption is based on a previous study that found that installing flashing red lights on alcohol gel dispensers at the hospital’s front entrance significantly affected hand hygiene compliance among employees and visitors [30].
Hypothesis 2c.
Placing the university logo on the robot’s chest would increase the perception of its authoritativeness and, by that, the passersby compliance. We assumed that the university logo might have the same effect as official uniforms serving as a certificate of legitimacy [31]. The impact of uniforms was demonstrated across various industries; uniforms promote brand identity establishment, improve customers’ experience, and imply an individual’s legitimacy, occupation, and authoritativeness [32]. Previous studies found that compliance was higher and more unquestioned when the confederate wore a uniform [33].
2. Materials and Methods
2.1. Application
A personal robot (we used Temi, purchased via ONE robotix [34] its local distributer in Israel) was designed as a COVID-19 Officer Robot (COR) to guide participants entering a public space and ensure they comply with COVID-19 restrictions—possessing a green pass and wearing a face mask. A use-case scenario was created by programming the COR to include new functionalities: informing passersby of the building’s entrance restrictions and asking for their green pass, detecting if the person is wearing a mask, and leading the person to a particular location in the building [35]. The scenario sequence of interaction with the COR (Figure 1) was as follows:
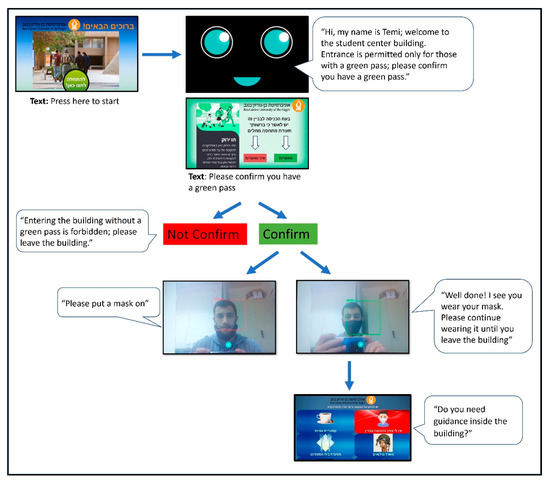
Figure 1.
COR’s screens and wording during the interaction scenario.
- The participants join the queue to enter the building. Once they reach the front of the line, they face the COR;
- COR’s screen presents a “click here” button to start a new interaction;
- COR introduces itself and explains the COVID restrictions;
- COR asks the participant(s) to approve having a green pass;
- COR uses a face recognition application to ensure the participant is wearing a mask; The participant must face the robot when this occurs;
- COR offers to escort the participants to their destination in the building.
2.2. Procedure
The COR was located at the entrance of the student center building on campus for three days in May 2021. Classes were not conducted on campus, apart from some hybrid courses and laboratories; hence, students and staff presence rates were lower than typical. Usually, people enter the student center building for various student services, the cafeteria, and the office supply store, which were all open at the time of the evaluation.
2.3. Studies
Two studies were conducted to explore direct and extended interactions with the COR. Previous studies [36,37] suggested that video experiments could be used for exploratory studies in HRI and that both direct and extended interaction could provide sufficient experience. However, direct contact affected explicit and implicit attitudes, while extended contact affected mostly implicit attitudes [38].
In the live interaction study, participants interacted directly with the COR in a public scenario setting. Video data was gathered and analyzed using thematic analysis to define the critical factors of the human–COR interaction and then to assess the effect of the robot’s visual appearance on passersby attitude and human–COR interaction. In the extended interaction study, the participants watched a recorded video presenting the CORs’ interaction scenario and then responded to an online questionnaire. The questions aimed to evaluate the effect of the COR’s appearance on the participants’ perception of it. Table 1 summarizes the direct and extended interaction studies.

Table 1.
Summary of the direct and extended interactions studies.
3. Direct Interaction Study
Three sessions were conducted on three separate days. The first session served as an exploratory observational study, using the Temi robot’s original design without add-ons, aiming at initial behavioral mapping. It also provided us with insights to evaluate the new application and implemented functionalities and the study design. Then, the design manipulation study was conducted in two daily sessions: the first was conducted with COR’s original design and the second with the addition of red and blue flashing lights above the screen and on the COR’s chest.
For all sessions, we created an entrance queue using two rope barriers, leading all passersby to the COR at the front of the line. Two video cameras filmed the interaction; camera A was placed near the COR to film passersby’s reactions and expressions. Camera B was placed on the second floor, providing a broader picture of the whole situation. Figure 2 presents the two cameras’ views, and Figure 3 illustrates the site map.

Figure 2.
(a) The view of camera A, facing the front of the line; (b) the view of camera B showing the COR and the rope barriers from above (see arrow).

Figure 3.
Site map, the student center building hallway.
All passersby that entered the building from this entrance were informed that they would be recorded via large visible signs near the building entrance.
3.1. Exploratory Observational Study for Initial Behavioral Mapping
3.1.1. Experiment
A total of 120 passersby were recorded entering the building in two different use cases: (a) COR was placed at the entrance (n = 60); (b) control group—no robot present (n = 60). The video data collected were analyzed using a thematic approach.
3.1.2. Results
The COR’s presence affected passersby’s compliance with the restrictions. Most passersby were wearing their masks correctly when entering the building; they either arrived with one or wore it at the entrance. A chi-square test of independence showed a significant association between the COR’s presence (yes/no) and participants’ compliance with wearing a mask, X2 (1, n = 120) = 9.78, p < 0.01. Passersby who interacted or even just noticed the COR were more likely to wear their masks when entering the building (87%, n = 52) than in the control group (62%, n = 37). From the thematic analysis, three themes emerged: engagement, compliance with university guidelines of wearing a mask, and attitude and reaction to the COR.
Engagement
Engagement with the COR refers to (a) the passersby’s willingness to interact with the robot and (b) their tolerance to complete the interaction session with it.
Observations: Waiting in line increases participants’ tendency to initiate and complete the interaction with the robot (Figure 4). The relation between these variables was significant using a chi-square test, X2 (1, n = 60) = 6.4, p < 0.05. When a line was formed (n = 33) (by chance or by using an extra), most participants (70%, n = 23) waited in line and completed the interaction session. However, when participants entered the building, and no one else was interacting with the COR (n = 27), only 37% of them (n = 10) chose to initiate interaction with the robot. Others avoided the robot.

Figure 4.
Participants waiting in line to enter the building.
These findings suggest that seeing other people interact with the COR may have created a sense of commitment toward others and university rules or reduced the anxiety from the unknown COR. Fifty-three percent of the passersby (n = 32) interacted with the COR; only 37.5% of them (n = 12) completed the interaction session. Among the participants who chose to quit, three had expressed confusion; it seemed that they were not sure what to do. As can be seen in the following example:
A female student entered the building; she approached the COR a few times, moving backward and forward. Then, disappointed, she looked around her to find someone for help. When she could not find assistance, she left the robot and returned a few seconds later, again with no success.
Forty-seven percent of the passersby (n = 28) avoided interacting with the COR in two forms of behavior: (a) ignoring and (b) evading. Both groups and solitary participants were recorded ignoring the COR’s existence and walking right through. Evading COR and sneaking into the building using a side path was more linked to solo participants. Figure 5 illustrates these two behaviors, and Figure 6 presents passersby avoiding the robot.
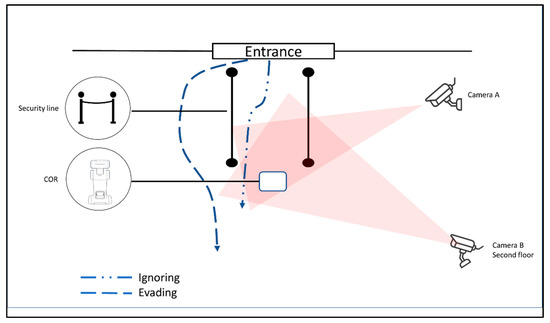
Figure 5.
Illustration of ignoring and evading behaviors.
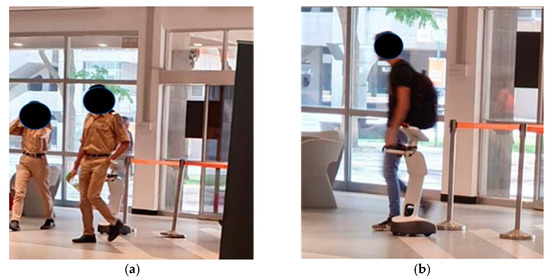
Figure 6.
(a) A group of participants ignoring the COR; (b) a student sneaks into the building using a side path.
The following examples demonstrate these two behaviors:
A female student entered the building when the COR completed an interaction scenario with two students; she noticed the robot and the students. There was no one in line behind them. The student walked in the path we created, right through the COR, without looking at it.
A man—a student or a university employee—entered the building and started walking in the path we created; once he noticed the COR, he moved backward, stepped out of the rope barriers, and sneaked through the side without passing in line.
Compliance with University Guidelines
Compliance refers to the passersby’s tendency to wear their masks after seeing or interacting with the robot. Our analysis could not define the reason for wearing the mask; either the robot served as a simple reminder of the restrictions or a sense of deterrence or authoritativeness. Hence, all passersby who entered the building wearing a mask were referred to as complying with university guidelines.
Observations: The effect of the COR’s presence on students and university employees to comply with university guidelines was significant. Passersby who interacted or even just noticed the robot were more likely to wear their masks while entering the building (as detailed empirically at the beginning of this section); this effect can be noted through an example:
A student entered the building; her mask was placed on her wrist, and she was not wearing it. After the student declared having a green pass, Temi reminded her that wearing a mask is required. The student took the mask from her wrist and wore it properly. During that time, behind her, another student was waiting in line. He entered the building wearing no mask. While waiting, he took a mask out of his belongings and wore it.
Attitude and Reaction to the COR
Attitude and reaction to the COR refer to participants’ responses to the robot, facial expressions, body language, and willingness to initiate further interaction beyond the obligatory scenario (i.e., approaching the robot on their way out of the building or asking the robot for escorting).
Observations: Entering the building in pairs or groups increased the willingness to relate to COR (talk, wave, etc.). Most of the passersby who were recorded doing so were not alone. The nature of the interaction changes; participants talked, waved, touched and pet the robot, and smiled at the robot and each other. Groups varied between 2 and 7 passersby; within groups, not all passersby behaved the same; as a result, it was difficult to indicate accurate numbers. Solitary passersby were more likely to smile at the robot, although some waved or talked out loud and even made funny faces. As was recorded in the following example:
A female student approached the COR; she looked very amused by the situation. As the robot started its mask detection process, she began dancing and making funny faces to the COR’s camera. The robot responded, saying: “Good job! I see you wear your mask properly”, the student started laughing.
Some participants asked the robot to escort them inside the building; all seemed familiar with the building, and it was clear that they did not need guidance. The following example demonstrates such a case:
Two students entered the building and followed COR’s instructions. At the end of the session, they asked the robot to escort and guide them somewhere in the building. While COR was calculating the path, the two students passed it and tried to call it using voice and hand gestures to follow them (Figure 7).

Figure 7.
Two students Trying to call the COR to follow them using voice and hand gestures.
Some participants were recorded taking photos or videos of the COR, either at the time of the interaction or while the COR was interacting with others. In addition, some of them took selfies with the robot. These actions may indicate a highly joyful or surprising experience. The following examples demonstrate these two behaviors:
While waiting in line, a student took her cell phone out of her pocket and started filming. She was filming the COR through the entire interaction scenario, and when the interaction was completed, she moved aside and continued filming the next participant.
A group of three students had completed their interaction with the COR; they asked the robot to escort them to the cafeteria. On their way there, they were trying to take selfies with it several times. The COR was moving too fast for that. The students arrived at the cafeteria and then returned and followed the robot back to its place to take a selfie while it was not moving (Figure 8).

Figure 8.
Three students taking “selfies” with the COR.
3.1.3. Basic Behaviors in Human–COR Interaction
The following three themes emerged from the thematic analysis: engagement, compliance with university guidelines, and attitude and reaction to the COR. These themes are conceptual notions that helped us define unique behaviors related to human–COR interaction. The following behaviors were defined through specific measurements identified in the observations, as detailed in Figure 9:
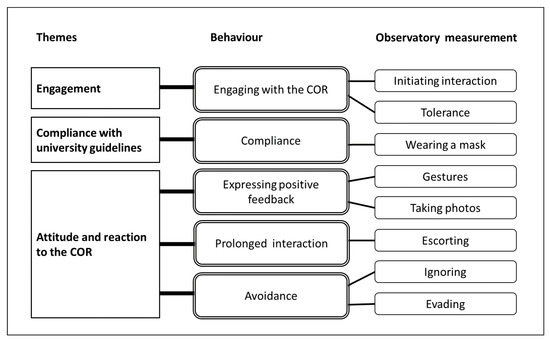
Figure 9.
From conceptual notion to observatory measurement.
- Engaging with the COR (e.g., initiating interaction and tolerance);
- Compliance with university guidelines (e.g., wearing a mask);
- Expressing positive feedback (i.e., smiling, waving, taking photos, etc.);
- Prolonged interaction (e.g., escorting);
- Avoidance (evading or ignoring).
3.1.4. Implications for Further Design
The exploratory observational study was used to improve the application design (e.g., screens and wording during the interaction scenario), COR’s performance (e.g., technical issues), and study design (e.g., tools and settings). The investigation resulted in three significant insights regarding the factors affecting the interaction (Table 2) leading to a modified COR’s application with a shorter interaction scenario (Figure 10).
Table 2.
Exploratory observational study’s findings and implications.

Figure 10.
Design manipulation study’s screens and wording during the interaction scenario.
3.2. Design Manipulation Study
3.2.1. Experiments
The modified COR was placed again at the student center building’s entrance for two days in May 2021. Two video cameras were used to film the interaction; the cameras’ placement was similar to the exploratory observational study.
A total of 221 passersby were recorded entering the building in the two sessions. Each session had a different design scenario: (a) COR’s original design with no manipulation (n = 101); (b) COR with flashing lights add-ons above the screen and on the COR’s chest (n = 120). Recorded data were analyzed using the basic behaviors identified in the thematic analysis (Section 3.1.3 and Figure 9). All participants were passersby’s who entered the building from the entrance where the robot was positioned. Table 3 presents their characteristics as derived from the video observations. To differentiate between ages and status, we characterized them either as young undergraduate students or older employees and graduate students.
Table 3.
Participants’ data.
3.2.2. Results
The chi-square test of independence revealed a significant relationship between the COR’s appearance and participants’ willingness to engage with the robot (X2 (1, n = 221) = 7.39, p < 0.01). Adding red and blue flashing lights onto the COR increased passersby engagement to initiate interaction. However, it did not affect their tolerance to complete the session. The proportion of participants who completed the interaction did not differ by the robot’s appearance, X2 (1, n = 221) = 0.6177, p > 0.05. The video data did not provide enough information regarding the participants’ reasons to terminate the interaction before its completion. However, the design manipulation decreased the participants’ desire to continue the interaction beyond the obligatory scenario; only 7% (n = 8) of the participants asked the COR to escort them to their place of need when the robot was wearing the flashing lights add-ons, compared to 16% (n = 16) in its original appearance. The relation between these variables was significant, X2 (1, n = 221) = 4.77, p < 0.05.
The passersby’s compliance with university guidelines (wearing a mask) was slightly higher when using the design manipulation; 92.5% (n = 101) were wearing a mask, compared to 84% (n = 85) using no add-ons. However, this association is not significant, p > 0.05.
The design manipulation did not significantly affect participants’ attitudes and reactions, although we observed a tendency to express less positive feedback about using flashing lights add-ons. Only 17% (n = 20) expressed positive body and facial gestures, and just 2% (n = 2) were documenting the situation using their smartphones, compared to 21% (n = 21) and 6% (n = 6), respectively, when there was no design manipulation. There was no significant association between the COR’s appearance and passersby’s avoidance (evading or ignoring). Table 4 summarizes the results.
Table 4.
Design manipulation effect on participants’ behaviors.
4. Extended Interaction Study (via Videos)
4.1. Experiment
This study aimed to evaluate the effect of minor design manipulation on human perception. For this study, we filmed three identical videos using actors playing the same scenario with a different design manipulation of the robot in each video (Figure 11): Temi as the COR in its traditional design, Temi with a large logo of Ben Gurion University on the COR’s chest, and Temi equipped with red and blue flashing lights add-ons. The videos emphasized these manipulations by using close-ups of them.

Figure 11.
The three design manipulations the way they appeared in the videos (from left to right): original design, University logo, and robot equipped with red and blue flashing lights.
An online questionnaire was distributed to students and university employees by email and social media (e.g., posted on the university’s Facebook page). The questionnaire was very short and straightforward; after a short demographic section (gender, age, and academic status). each participant watched one video selected randomly, followed by a questionnaire which included a list of characteristics selected according to the robot’s role [17,18]: Innovative, Reliable, Professional, Cute, Elegant, Threatening, Friendly, Authoritative, Aggressive, and Inviting. Participants were asked to rate their perception of each characteristic via a Likert scale of five points according to their impression of the COR. In addition, participants could add comments.
A total of 111 participants began filling the questionnaire; yet only 47 (24 males and 23 females at the ages of 21–56 M = 28.3 years, SD = 7.15) watched the entire video and completed the questionnaire as being asked (perhaps due to technological issues or personal). Therefore, the results use the data of participants that watched the entire video and completed the questionnaire. Table 5 summarizes the participants’ data.
Table 5.
Online questionnaire participants.
4.2. Results
Due to the small sample size, we were not able to declare statistical significance. Still, results (shown in Table 6) revealed some worth mentioning insights:
Table 6.
The four perceived characteristics that were impacted by the design manipulations.
- Temi’s original design was perceived as friendlier and less aggressive than the two other appearances;
- Adding the university logo or the flashing lights contributed to authoritativeness (the robot with the university logo was perceived as the most authoritative);
- The robot with the flashing lights was perceived as the most threatening;
- The design manipulations did not affect the perception of the robot as being Innovative, Inviting, Reliable, Professional, or Elegant.
Participants’ gender did not significantly affect their perception of the robot, although female participants rated all three robots slightly higher for elegant, innovative, and reliable (Figure 12).

Figure 12.
(a) Design manipulations effect on perceived characteristics; (b) The nonsignificant gender effect on perceived robots’ characteristics.
Fourteen participants contributed comments to improve the interaction with the COR. We excluded greetings and vague statements and remained with nine constructive criticism comments. A thematic analysis of participants’ comments (Table 7) revealed three themes: Appearance, Usability, and User experience. Two out of nine participants suggested that the robot should be taller to gain users’ trust and improve deterrence. They recommended that all-voice instructions appear as text to improve accessibility for deaf and hard of hearing people and improve usability (n = 2). User experience can be enhanced by matching the robot’s voice to its appearance (n = 2) and expedite the entire process (n = 2). One additional important note was that using a touch screen is less appropriate in times of a pandemic (n = 1).
Table 7.
A thematic analysis of participants’ additional comments.
5. Discussion
Our findings support Hypothesis 1, that using robots as COVID-19 officers may be beneficial to achieve passersby compliance. We suggest two possible motives for these findings: increasing deterrence or increasing awareness.
The direct interaction study observations revealed that waiting in line and seeing others communicate with the COR increased participants’ tendency to complete the interaction with the COR. These findings correlate with previous studies that found that watching a person interact with a public robot often draws others to interact with it [39]. A possible explanation may be that seeing other people interacting with the COR results in a sense of obligation toward others and university rules [40]. Another possible reason is that seeing others interact with the COR reduces the anxiety of the unknown [41]. Passersby’s Compliance with university guidelines was slightly higher when using the design manipulation (see Section 3.2.2). However, this association was not significant. Therefore, it cannot fully support Hypothesis 2a, which assumed that adding red and blue flashing lights to the COR would increase passersby compliance.
The extended interaction study revealed that minor manipulations affect human perception of the following COR characteristics: threatening, friendly, authoritative, and aggressive (as detailed in Section 4.2). These findings can support Hypothesis 2a,b. The red and blue flashing lights contributed to the perception of COR as being more threatening and aggressive; these characteristics were associated with higher compliance. Adding the university logo contributed to a perception of authoritativeness; previous studies have shown that people tend to comply with others who display or are assumed to have authority [42].
The nature of the direct study, however, is subject to several limitations. First, it is based on a population limited to students and employees. Second, thematic analysis is a practical approach that enables researchers to generate new insights and concepts obtained from data. However, it may have disadvantages, as there can be different ways to interpret meaning from the observed data.
The extended interaction study had a limited sample size; only 47 respondents completed the questionnaire, most of them were students, and only a few were university employees. Yet, the results set the ground for further research, using a larger, more varied sample. Lastly, our studies were conducted in Israel among Hebrew speakers, so cultural differences may appear if replicated in other places. We followed a two-way translation procedure for the robot characteristics to ensure that the perception of words in translation to English has the same meaning. Still, chances exist that our results are sensitive to cultural and language differences. Additionally, we could not conduct another direct study using a second design manipulation (e.g., adding the university logo) because of COVID restrictions.
6. Conclusions
This study demonstrated that a COR can be used as a security guard as its presence significantly affects passersby compliance. Furthermore, we demonstrated that even minor design manipulations can influence users’ perceptions and attitudes toward officer robots using both direct and extended interactions.
The thematic approach used to analyze the video data emerged with three themes: Engagement, Compliance with university guidelines, and Attitude and reaction to the COR. This thematic analysis enabled to define of an initial behavioral mapping related to human–COR interaction: Engaging with the COR (e.g., initiating interaction and tolerance), Compliance with university guidelines (e.g., wearing a mask), Expressing positive feedback (i.e., smiling, waving, taking photos, etc.), Prolonged interaction (e.g., escorting), and Avoidance (evading or ignoring).
The observational measurement scheme and the identified behaviors provide a basis for behavioral mapping of human–COR interaction. This type of mapping can support others in portraying the observed behaviors they have foreseen when interacting with authoritative robots in public places. Additionally, forming a set of standard observatory measurements can help compare studies and finesse our shared knowledge of how people interact with robots in different public roles—authoritative or not. Finally, the insights of this research can support manufacturers in rapidly adjusting their robots to new domains and tasks.
Author Contributions
Conceptualization, A.D., E.L.-P., Y.E. and T.O.-G.; methodology, E.L.-P., A.D., V.S.-F., Y.E. and T.O.-G.; software, A.D. and Y.E.; investigation, E.L.-P. and A.D.; writing—original draft preparation, E.L.-P.; writing—review and editing, E.L.-P., A.D., V.S.-F., Y.E. and T.O.-G.; supervision, T.O.-G. and Y.E.; project administration, V.S.-F.; funding acquisition, T.O.-G. and Y.E. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by Ministry of Innovation, Science and Technology, Israel (grant 3-15625), and by Ben-Gurion University of the Negev through the Helmsley Charitable Trust, the Agricultural, Biological and Cognitive Robotics Initiative, the W. Gunther Plaut Chair in Manufacturing Engineering and by the George Shrut Chair in Human performance Management.
Institutional Review Board Statement
The study was conducted and approved by the BGU university internal review board (IRB) for human participants.
Informed Consent Statement
All passersby that entered the building and participated in the study were informed that they would be recorded via large visible signs near the building entrance. Written informed consent was obtained from the participants to use their photos in this paper.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy concerns.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Marques, L.; Murphy, R.; Althoefer, K.; Tadokoro, S.; Laschi, C. Robotics Responds to the COVID-19 Outbreak [From the Guest Editors]. IEEE Robot. Autom. Mag. 2021, 28, 16–17. [Google Scholar] [CrossRef]
- IFR. Executive Summary World Robotics 2020 Service Robots. 2020. Available online: https://ifr.org/img/worldrobotics/Executive_Summary_WR_2020_Service_Robots.pdf (accessed on 5 May 2021).
- Tavakoli, M.; Carriere, J.; Torabi, A. Robotics, smart wearable technologies, and autonomous intelligent systems for healthcare during the COVID-19 pandemic: An analysis of the state of the art and future vision. Adv. Intell. Syst. 2020, 2, 2000071. [Google Scholar] [CrossRef]
- Bin Shamsudin, A.U.; Seng, C.K.; bin Abdul Rahman, H.; Hanafi, D.; bin Mhd Poad, H. Development of 7 DOF robotic arm with electronic bluetooth stethoscope for COVID patient medical assesment. In Proceedings of the 2020 IEEE Student Conference on Research and Development (SCOReD), Batu Pahat, Malaysia, 27–29 September 2020; pp. 1–5. [Google Scholar]
- Yang, G.; Lv, H.; Zhang, Z.; Yang, L.; Deng, J.; You, S.; Du, J.; Yang, H. Keep healthcare workers safe: Application of teleoperated robot in isolation ward for COVID-19 prevention and control. Chin. J. Mech. Eng. 2020, 33, 47. [Google Scholar] [CrossRef]
- Scassellati, B.; Vázquez, M. The potential of socially assistive robots during infectious disease outbreaks. Sci. Robot. 2020, 5, 44. [Google Scholar] [CrossRef]
- Brakman, S.; Garretsen, H.; van Witteloostuijn, A. Robots do not get the coronavirus: The COVID-19 pandemic and the international division of labor. J. Int. Bus. Stud. 2021, 52, 1215–1224. [Google Scholar] [CrossRef] [PubMed]
- Lund, S.; Madgavkar, A.; Manyika, J.; Smit, S.; Ellingrud, K.; Meaney, M.; Robinson, O. The Future of Work after COVID-19; McKinsey Global Institute, 2021; Available online: https://www.mckinsey.com/featured-insights/future-of-work/the-future-of-work-after-covid-19 (accessed on 16 November 2021).
- Available online: https://www.zenefits.com/workest/these-new-jobs-were-created-in-response-to-covid-19 (accessed on 16 November 2021).
- Available online: https://www.shrm.org/resourcesandtools/hr-topics/talent-acquisition/pages/new-types-jobs-emerge-from-covid-19.aspx (accessed on 16 November 2021).
- Beer, J.M.; Prakash, A.; Mitzner, T.L.; Rogers, W.A. Understanding Robot Acceptance; Georgia Institute of Technology: Atlanta, GA, USA, 2011. [Google Scholar]
- Goetz, J.; Kiesler, S.; Powers, A. Matching robot appearance and behavior to tasks to improve human-robot cooperation. In Proceedings of the 12th IEEE International Workshop on Robot and Human Interactive Communication, 2003. Proceedings. ROMAN, Millbrae, CA, USA, 2 November 2003; pp. 55–60. [Google Scholar]
- Onnasch, L.; Roesler, E. A taxonomy to structure and analyze human–robot interaction. Int. J. Soc. Robot. 2021, 13, 833–849. [Google Scholar] [CrossRef]
- Broadbent, E.; Kumar, V.; Li, X.; Sollers, J., 3rd; Stafford, R.Q.; MacDonald, B.A.; Wegner, D.M. Robots with display screens: A robot with a more humanlike face display is perceived to have more mind and a better personality. PLoS ONE 2013, 8, e72589. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.H.; Fassert, C.; Rigaud, A.S. Designing robots for the elderly: Appearance issue and beyond. Arch. Gerontol. Geriatr. 2012, 54, 121–126. [Google Scholar] [CrossRef] [PubMed]
- Björklund, L. Knock on Wood: Does Material Choice Change the Social Perception of Robots? Master’s Thesis, KTH, Stockholm, Sweden, 2018. [Google Scholar]
- Liberman-Pincu, E.; Permet, Y.; Oron-Gilad, T. Judging a SAR by Its Cover; The Effect of Body Structure, Outline, and Color on Users’ Perception. 2021. Available online: https://www.researchgate.net/publication/354947812_Judging_a_socially_assistive_robot_SAR_by_its_cover_The_effect_of_body_structure_outline_and_color_on_users’_perception (accessed on 16 November 2021).
- Liberman-Pincu, E.; Van Grondelle, E.D.; Oron-Gilad, T. Designing robots with relationships in mind: Suggesting two models of human-socially assistive robot (SAR) relationship. In Proceedings of the HRI ’21 Companion: Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 555–558. [Google Scholar]
- Liberman-Pincu, E.; Oron-Gilad, T. Impacting the perception of socially assistive robots-evaluating the effect of visual qualities among children. In Proceedings of the 2021 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; pp. 612–618. [Google Scholar]
- Trovato, G.; Do, M.; Terlemez, Ö.; Mandery, C.; Ishii, H.; Bianchi-Berthouze, N.; Asfour, T.; Takanishi, A. Is hugging a robot weird? Investigating the influence of robot appearance on users’ perception of hugging. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 318–323. [Google Scholar]
- Fitter, N.T.; Strait, M.; Bisbee, E.; Mataric, M.J.; Takayama, L. You’re wigging me out! Is personalization of telepresence robots strictly positive? In Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 168–176. [Google Scholar]
- Available online: https://corona.health.gov.il/en/directives/green-pass-info/ (accessed on 16 November 2021).
- Fan, T.; Chen, Z.; Zhao, X.; Liang, J.; Shen, C.; Manocha, D.; Pan, J.; Zhang, W. Autonomous social distancing in urban environments using a quadruped robot. arXiv 2020, arXiv:2008.08889. [Google Scholar]
- Sathyamoorthy, A.J.; Patel, U.; Savle, Y.A.; Paul, M.; Manocha, D. COVID-robot: Monitoring social distancing constraints in crowded scenarios. arXiv 2020, arXiv:2008.06585. [Google Scholar]
- Tsai, Y.L. One Service Robot’s Exploration of Entertainment Methods during COVID-19. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 2021. [Google Scholar]
- Bana, P.R. Robot vs. Stick: The Impact of Anthropomorphism on the Use of Hand Sanitizer. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 2021. [Google Scholar]
- McCaffrey, C.; Taylor, A.; Roy, S.; Banisetty, S.B.; Mead, R.; Williams, T. Can robots be used to encourage social distancing? In Proceedings of the HRI ’21 Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 475–478. [Google Scholar]
- Natarajan, M.; Gombolay, M. Effects of anthropomorphism and accountability on trust in human robot interaction. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 33–42. [Google Scholar]
- Haring, K.S.; Satterfield, K.M.; Tossell, C.C.; de Visser, E.J.; Lyons, J.R.; Mancuso, V.F.; Finomore, V.S.; Funke, G.J. Robot authority in human-robot teaming: Effects of human-likeness and physical embodiment on compliance. Front. Psychol. 2021, 12, 625713. [Google Scholar] [CrossRef] [PubMed]
- D’Egidio, G.; Patel, R.; Rashidi, B.; Mansour, M.; Sabri, E.; Milgram, P. A study of the efficacy of flashing lights to increase the salience of alcohol-gel dispensers for improving hand hygiene compliance. Am. J. Infect. Control 2014, 42, 852–855. [Google Scholar] [CrossRef] [PubMed]
- Joseph, N.; Alex, N. The uniform: A sociological perspective. Am. J. Sociol. 1972, 77, 719–730. [Google Scholar] [CrossRef]
- Alias, M.R.; Bahron, A. Review on police uniform perception. Int. J. Acad. Res. Bus. Soc. Sci. 2019, 9, 808–816. [Google Scholar] [CrossRef]
- Bushman, B.J. The effects of apparel on compliance: A field experiment with a female authority figure. Personal. Soc. Psychol. Bull. 1988, 14, 459–467. [Google Scholar] [CrossRef]
- Available online: https://www.onerobotix.co.il/ (accessed on 16 November 2021).
- David, A. Robotic Inspector for COVID-19. Final Project Report; Dept. of Industrial Engineering and Management, Ben-Gurion University of the Negev: Beer Sheva, Israel, 2021. [Google Scholar]
- Woods, S.; Walters, M.; Koay, K.L.; Dautenhahn, K. Comparing human robot interaction scenarios using live and video based methods: Towards a novel methodological approach. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 750–755. [Google Scholar]
- Woods, S.N.; Walters, M.L.; Koay, K.L.; Dautenhahn, K. Methodological issues in HRI: A comparison of live and video-based methods in robot to human approach direction trials. In Proceedings of the ROMAN 2006—The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 51–58. [Google Scholar]
- Gou, M.S.; Webb, T.L.; Prescott, T. The effect of direct and extended contact on attitudes towards social robots. Heliyon 2021, 7, e06418. [Google Scholar]
- Fraune, M.R.; Šabanović, S.; Kanda, T. Human group presence, group characteristics, and group norms affect human-robot interaction in naturalistic settings. Front. Robot. AI 2019, 6, 48. [Google Scholar] [CrossRef] [PubMed]
- Tomasello, M. The moral psychology of obligation. Behav. Brain Sci. 2019, 43, 1–33. [Google Scholar] [CrossRef] [PubMed]
- Weiss, A.; Bernhaupt, R.; Tscheligi, M.; Wollherr, D.; Kuhnlenz, K.; Buss, M. A methodological variation for acceptance evaluation of human-robot interaction in public places. In Proceedings of the RO-MAN 2008—The 17th IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; pp. 713–718. [Google Scholar]
- Haring, K.S.; Mosley, A.; Pruznick, S.; Fleming, J.; Satterfield, K.; de Visser, E.J.; Tossell, C.C.; Funke, G. Robot authority in human-machine teams: Effects of human-like appearance on compliance. In International Conference on Human-Computer Interaction, Virtual, Augmented and Mixed Reality. Applications and Case Studies, Proceedings of the 11th International Conference, VAMR 2019, Held as Part of the 21st HCI International Conference, HCII 2019, Orlando, FL, USA, 26–31 July 2019; Springer: Cham, Switzerland, 2019; pp. 63–78. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).