
Familiar and Strange: Gender, Sex, and Love in the Uncanny Valley

{kind=link}
Abstract
:1. Introduction
2. Theories of the Uncanny
2.1. Strangeness
2.2. Familiarity
3. Anthropomorphization and Sociality
4. Gender, Sex, and Love
5. Conclusions
Acknowledgments
Conflicts of Interest
References
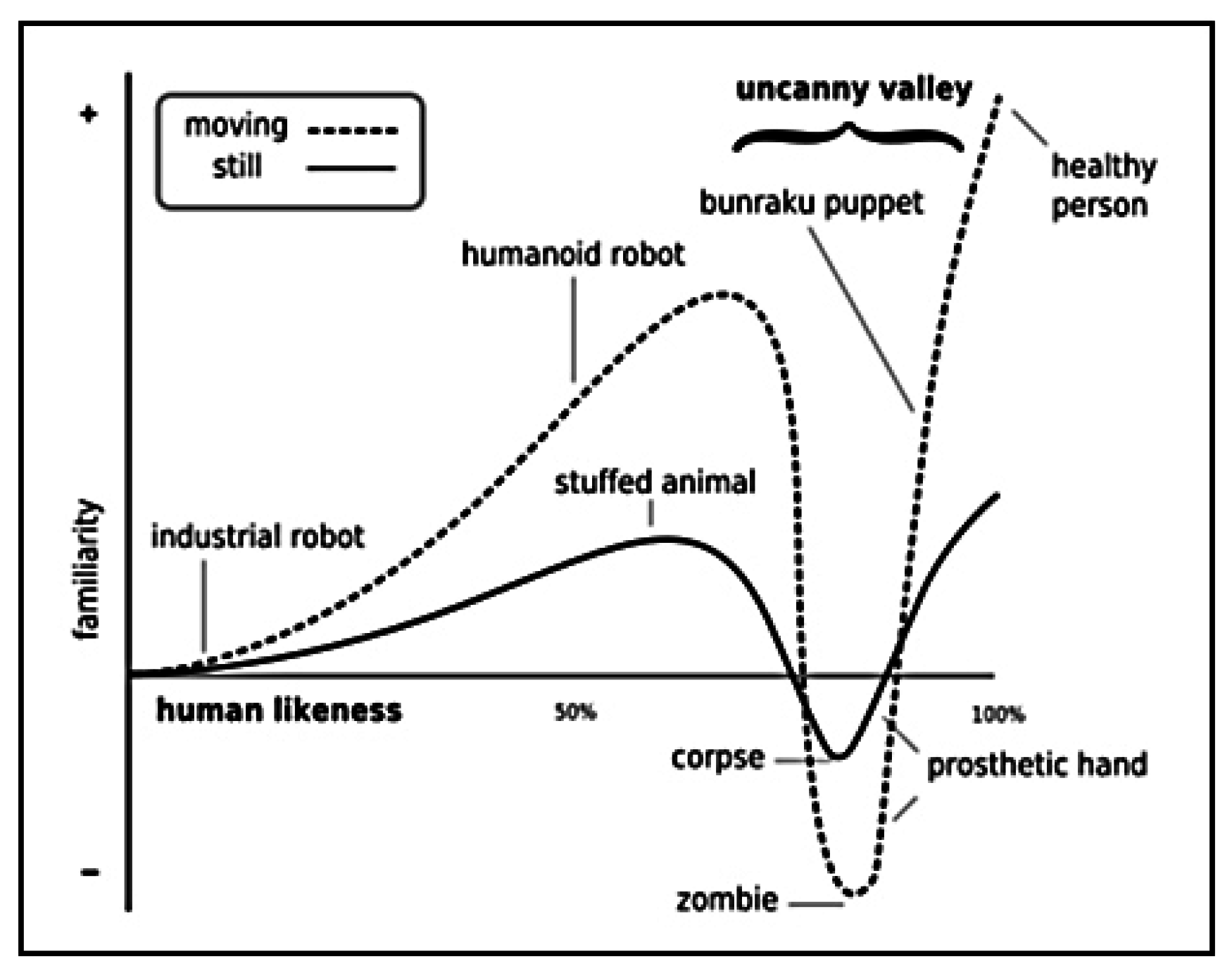
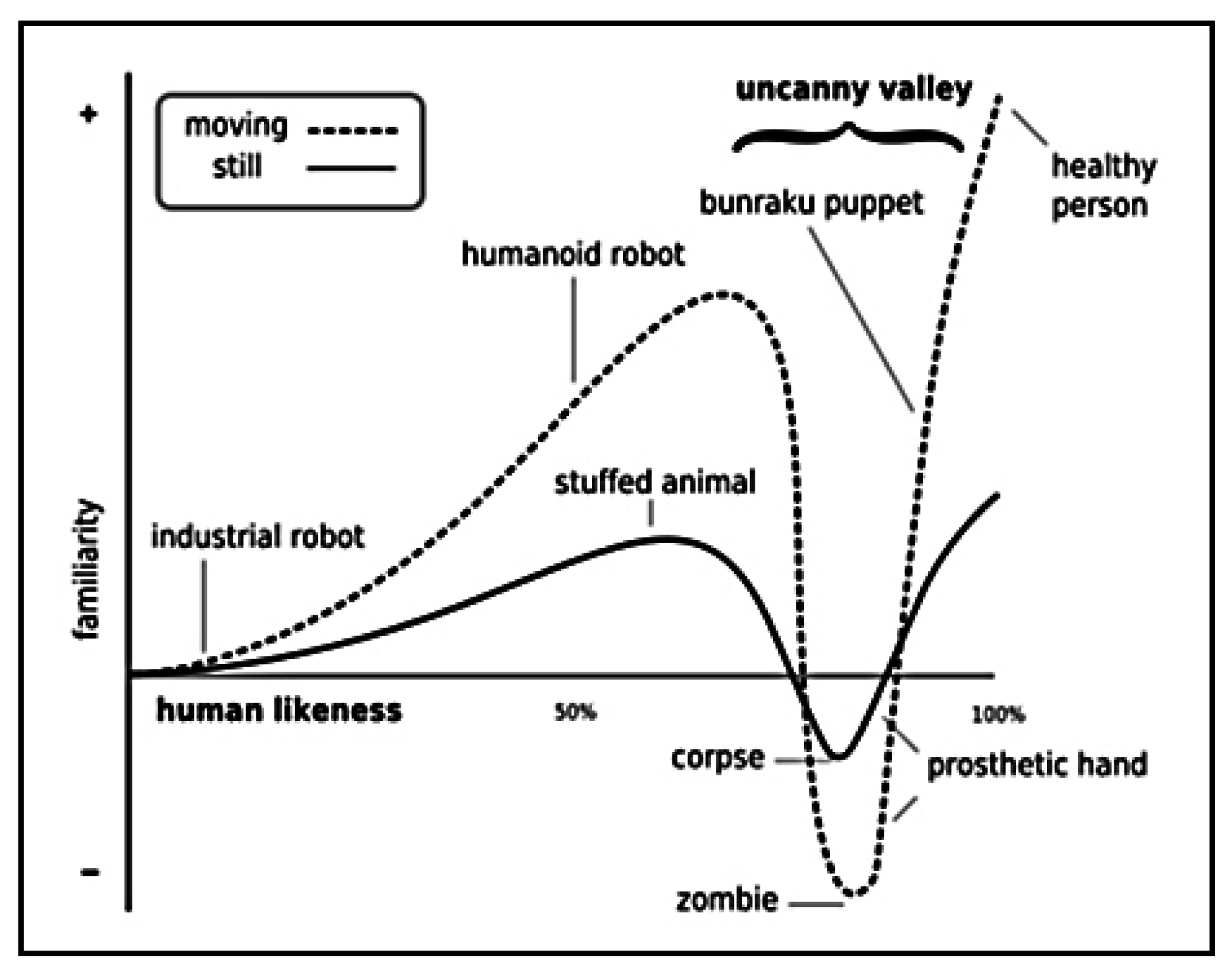
- Mori, M. The Uncanny Valley. Energy 1970, 7, 33–35. [Google Scholar]
- Mori, M.; MacDorman, K.F.; Kageki, N. The uncanny valley [from the field]. IEEE Robot. Autom. Mag. 2012, 19, 98–100. [Google Scholar] [CrossRef]
- Jentsch, E. On the Psychology of the Uncanny Angelaki. J. Theor. Humanit. 1996, 2, 7–16. [Google Scholar] [CrossRef]
- Freud, S. The Uncanny; The Standard Edition of the Complete Psychological Works of Sigmund Freud 17; Imago: London, UK, 1919; pp. 219–252. [Google Scholar]
- Kristeva, J. Powers of Horror; University Presses of California: Jackson, TN, USA; University Presses of Columbia: New York, NY, USA; University Presses of Princeton: West Sussex, UK, 1982; p. 71. [Google Scholar]
- Walters, M.L.; Syrdal, D.S.; Dautenhahn, K.; Te Boekhorst, R.; Koay, K.L. Avoiding the uncanny valley: Robot appearance, personality and consistency of behavior in an attention-seeking home scenario for a robot companion. Auton. Robot. 2008, 24, 159–178. [Google Scholar] [CrossRef] [Green Version]
- Brenton, M.G.; Daniel, B.; David, C. The uncanny valley: Does it exist. In Proceedings of the Conference of Human Computer Interaction, Workshop on Human Animated Character Interaction, Las Vegas, NV, USA, 22–27 July 2005.
- Burleigh, T.J.; Schoenherr, J.R.; Lacroix, G.L. Does the Uncanny Valley Exist? An Empirical Test of the Relationship between Eeriness and the Human Likeness of Digitally Created Faces. Comput. Hum. Behav. 2013, 29, 759–771. [Google Scholar] [CrossRef]
- Cheetham, M.; Pascal, S.; Lutz, J. The Human Likeness Dimension of the “Uncanny Valley Hypothesis”: Behavioral and Functional MRI Findings. Front. Hum. Neurosci. 2011, 5, 126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saygin, A.P.; Thierry, C.; Ishiguro, H.; Driver, J.; Frith, C. The Thing That Should Not Be: Predictive Coding and the Uncanny Valley in Perceiving Human and Humanoid Robot Actions. Soc. Cogn. Affect. Neurosci. 2013, 7, 413–422. [Google Scholar] [CrossRef] [PubMed]
- Cheetham, M.; Pavlovic, I.; Jordan, N.; Suter, P.; Jancke, L. Category Processing and the Human Likeness Dimension of the Uncanny Valley Hypothesis: Eye-tracking Data. Front. Psychol. 2013, 4, 108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamada, Y.; Kawabe, T.; Ihaya, K. Categorization Difficulty is Associated with Negative Evaluation in the “Uncanny Valley” Phenomenon. Jpn. Psychol. Res. 2013, 55, 20–32. [Google Scholar] [CrossRef]
- Calder, A.J. Categorical Perception of Morphed Facial Expressions. Vis. Cogn. 1996, 3, 81–118. [Google Scholar] [CrossRef]
- Harnad, S.R. (Ed.) Categorical Perception: The Groundwork of Cognition; Cambridge University Press: Cambridge, UK, 1990.
- Tondu, B.; Bardou, N. A new interpretation of Mori’s uncanny valley for future humanoid robots. Int. J. Robot. Autom. 2001, 26, 337. [Google Scholar] [CrossRef]
- Gray, K.; Wegner, D.M. Feeling robots and human zombies: Mind perception and the uncanny valley. Cognition 2012, 125, 125–130. [Google Scholar] [CrossRef] [PubMed]
- Ramey, C.H. The uncanny valley of similarities concerning abortion, baldness, heaps of sand, and humanlike robots. In Proceedings of the Views of the Uncanny Valley Workshop: IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 8–13.
- Lamb, M.E. The development of social expectations in the first year of life. In Infant Social Cognition: Empirical and Theoretical Considerations; Psychology Press: East Sussex, UK, 1981; pp. 155–175. [Google Scholar]
- Landis, D.; Triandis, H.C.; Adamopoulos, J. Habit and behavioral intentions as predictors of social behavior. J. Soc. Psychol. 1978, 106, 227–237. [Google Scholar] [CrossRef]
- Eyssel, F.; Kuchenbrandt, D.; Bobinger, S. Effects of anticipated human-robot interaction and predictability of robot behavior on perceptions of anthropomorphism. In Proceedings of the 6th International Conference on Human-Robot Interaction ACM 2011, Lausanne, Switzerland, 6–9 March 2011; pp. 61–68.
- Tinwell, A.; Grimshaw, M.; Nabi, D.A.; Williams, A. Facial expression of emotion and perception of the Uncanny Valley in virtual characters. Comput. Hum. Behav. 2011, 27, 741–749. [Google Scholar] [CrossRef]
- Mitchell, W.J.; Szerszen, K.A.; Lu, A.S.; Schermerhorn, P.W.; Scheutz, M.; MacDorman, K.F. A mismatch in the human realism of face and voice produces an uncanny valley. I-Percept. 2011, 2, 10–12. [Google Scholar] [CrossRef] [PubMed]
- Blow, M.; Dautenhahn, K.; Appleby, A.; Nehaniv, C.L.; Lee, D. The art of designing robot faces: Dimensions for human-robot interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction 2006, Salt Lake City, UT, USA, 2–3 March 2006; pp. 331–332.
- MacDorman, K.F. Subjective ratings of robot video clips for human likeness, familiarity, and eeriness: An exploration of the uncanny valley. In Proceedings of the ICCS/CogSci-2006 Long Symposium: Toward Social Mechanisms of Android Science, Vancouver, BC, Canada, 26 July 2006; pp. 26–29.
- Seyama, J.; RNagayama, R.S. The uncanny valley: Effect of realism on the impression of artificial human faces. Presence 2007, 16, 337–351. [Google Scholar] [CrossRef]
- DiSalvo, C.F.; Gemperle, F.; Forlizzi, J.; Kiesler, S. All robots are not created equal: The design and perception of humanoid robot heads. In Proceedings of the 4th Conference on Designing Interactive Systems: Processes, Practices, Methods, and Techniques ACM, London, UK, 25–28 June 2002; pp. 321–326.
- Hanson, D.; Olney, A.; Prilliman, S.; Mathews, E.; Zielke, M.; Hammons, D.; Stephanou, H. Upending the uncanny valley. In Proceedings of the National Conference on Artificial Intelligence, Pittsburgh, Pennsylvania, 9–13 July 2005.
- Clasen, M. The Anatomy of the Zombie: A Bio-Psychological Look at the Undead Other. Otherness Essays Stud. 2010, 1, 1–23. [Google Scholar]
- Rozin, P.; Fallon, A.P. A perspective on disgust. Psychol. Rev. 1987, 94, 23–41. [Google Scholar] [CrossRef] [PubMed]
- Moosa, M.M.; Minhaz Ud-Dean, S.M. Danger avoidance: An evolutionary explanation of the uncanny valley. Biol. Theory 2010, 5, 12–14. [Google Scholar] [CrossRef]
- MacDorman, K.F. Mortality Salience and the Uncanny Valley. In Proceedings of the 2005 5th IEEE-RAS International Conference on Humanoid Robots, Tukuba, Japan, 5–7 December 2005.
- MacDorman, K.F.; Ishaguro, H. Subjective Ratings of Robot Video Clips for Human Likeness, Familiarity, and Eeriness: An exploration of the uncanny valley. In Proceedings of the ICCS/CogSci-2006 Long Symposium: Toward Social Mechanisms of Android Science, Vancouver, BC, Canada, 26 July 2006.
- Ho, C.C.; MacDorman, K.F.; Pramono, Z.D. Human emotion and the uncanny valley: A GLM, MDS, and Isomap analysis of robot video ratings. In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction, Amsterdam, The Netherlands, 12–15 March 2008; pp. 169–176.
- Schaller, M.; Park, J.H. The behavioral immune system (and why it matters). Curr. Dir. Psychol. Sci. 2011, 20, 99–103. [Google Scholar] [CrossRef]
- Green, R.D.; MacDorman, K.F.; Ho, C.-C.; Vasudevan, S. Sensitivity to the proportions of faces that vary in human likeness. Comput. Hum. Behav. 2008, 24, 2456–2474. [Google Scholar] [CrossRef]
- MacDorman, K.F.; Green, R.D.; Ho, C.-C.; Koch, C.T. Too Real for Comfort? Uncanny Responses to Computer Generated Faces. Comput. Hum. Behav. 2009, 25, 695–710. [Google Scholar] [CrossRef]
- Donovan, J.M. Facial Attractiveness: Evolutionary, Cognitive, and Social Perspectives; Ablex Publishing: Westport, CT, USA, 2002. [Google Scholar]
- Rhodes, G. The Evolutionary Psychology of Facial Beauty. Annu. Rev. Psychol. 2006, 57, 199–226. [Google Scholar] [CrossRef] [PubMed]
- Breazeal, C. Emotion and sociable humanoid robots. Int. J. Hum. Comput. Stud. 2003, 59, 119–155. [Google Scholar] [CrossRef]
- Krach, S.; Hegel, F.; Wrede, B.; Sagerer, G.; Binkofski, F.; Kircher, T. Can machines think? Interaction and perspective taking with robots investigated via fMRI. PLoS ONE 2008, 3, e2597. [Google Scholar] [CrossRef] [PubMed]
- Chaminade, T.; Hodgins, J.; Kawato, M. Anthropomorphism influences perception of computer-animated characters’ actions. Soc. Cogn. Affect. Neurosci. 2007, 2, 206–216. [Google Scholar] [CrossRef] [PubMed]
- Coeckelbergh, M. Artificial companions: Empathy and vulnerability mirroring in human-robot relations. In Studies Ethics, Law, and Technology; Berkeley Electronic Press: Berkeley, CA, USA, 2010; Volume 4. [Google Scholar]
- Suzuki, Y.; Galli, A.; Ilkeda, A.; Itakura, S.; Kitazaki, M. Measuring empathy for human and robot hand pain using electroencephalography. Sci. Rep. 2015, 5, 15924. [Google Scholar] [CrossRef] [PubMed]
- Sabanovic, S.; Michalowski, M.P.; Simmons, R. Robots in the wild: Observing human-robot social interaction outside the lab. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 596–601.
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review. Gerontechnology 2009, 8, 94–103. [Google Scholar] [CrossRef]
- Tapus, A.; Peca, A.; Aly, A.; Pop, C.; Jisa, L.; Pintea, S.; Rusu, A.S.; David, D.O. Children with autism social engagement in interaction with Nao, an imitative robot—A series of single case experiments. Interact. Stud. 2012, 13, 315–347. [Google Scholar] [CrossRef]
- Breazeal, C. Toward sociable robots. Robot. Auton. Syst. 2003, 42, 167–175. [Google Scholar] [CrossRef]
- Breazeal, C.; Takanishi, A.; Kobayashi, T. Social robots that interact with people. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1349–1369. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Kidd, C.D.; Taggart, W.; Turkle, S. A sociable robot to encourage social interaction among the elderly. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3972–3976.
- Sung, J.-Y.; Guo, L.; Grinter, R.E.; Christensen, H.I. “My Roomba is Rambo”: Intimate home appliances. In International Conference on Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2007; pp. 145–162. [Google Scholar]
- Lee, S.-L.; Lau, I.Y.-M.; Kiesler, S.; Chiu, C.-Y. Human mental models of humanoid robots. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Shatin, China, 5–9 July 2005; pp. 2767–2772.
- Powers, A.; Kiesler, S. The advisor robot: Tracing people’s mental model from a robot’s physical attributes. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 218–225.
- Phillips, E.; Ososky, S.; Grove, J.; Jentsch, F. From tools to teammates toward the development of appropriate mental models for intelligent robots. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Las Vegas, NV, USA, 19–23 September 2011; Volume 55, pp. 1491–1495.
- Dautenhahn, K.; Woods, S.; Kaouri, C.; Walters, M.L.; Koay, K.L.; Werry, I. What is a robot companion-friend, assistant or butler? In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1192–1197.
- Goetz, J.; Kiesler, S.; Powers, A. Matching robot appearance and behavior to tasks to improve human-robot cooperation. In Proceedings of the 12th IEEE International Workshop on Robot and Human Interactive Communication (ROMAN 2003), Millbrae, CA, USA, 31 October–2 November 2003; pp. 55–60.
- Schaefer, K.E.; Sanders, T.L.; Yordon, R.E.; Billings, D.R.; Hancock, P.A. Classification of robot form: Factors predicting perceived trustworthiness. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Boston, MA, USA, 22–26 October 2012; Volume 56, pp. 1548–1552.
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places; Center for the Studies of Language and Information Publications: Stanford, CA, USA, 1996. [Google Scholar]
- Breazeal, C. Designing Sociable Robots; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Shipman, P. The Animal Connection; Norton: New York, NY, USA, 2011. [Google Scholar]
- Dautenhahn, K. Robots we like to live with?!—A developmental perspective on a personalized, life-long robot companion. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (ROMAN 2004), Okayama, Japan, 20–22 September 2004; pp. 17–22.
- Brown, L.A.; Walker, W.H. Prologue: Archaeology, animism and non-human agents. J. Archaeol. Method Theory 2008, 15, 297–299. [Google Scholar] [CrossRef]
- Alberti, B.; Bray, T.L. Introduction. Camb. Archaeol. J. 2009, 19, 337–343. [Google Scholar] [CrossRef]
- Turkle, S. Authenticity in the Age of Computers. In Machine Ethics; Michael, A., Anderson, S.L., Eds.; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- Duffy, B.R. Anthropomorphism and the social robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Tondu, B.; Bardou, N. Aesthetics and robotics: Which form to give to the human-like robot? World Acad. Sci. Eng. Technol. 2009, 58, 650–657. [Google Scholar]
- Miyauchi, D.; Sakurai, A.; Nakamura, A.; Kuno, Y. Active eye contact for human-robot communication. In Proceedings of the CHI’04 Extended Abstracts on Human Factors in Computing Systems, Vienna, Austria, 24–29 April 2004; pp. 1099–1102.
- Dautenhahn, K. Socially intelligent robots: Dimensions of human–robot interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Siegel, M.; Brazeal, C.; Norton, M.I. Persuasive robotics: The influence of robot gender on human behavior. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’09), St. Louis, MO, USA, 10–15 October 2009; pp. 2563–2568.
- Carpenter, J.; Davis, J.M.; Erwin-Stuart, N.; Lee, T.R.; Bransford, J.D.; Vye, N. Gender representation and humanoid robots designed for domestic use. Int. J. Soc. Robot. 2009, 1, 261–265. [Google Scholar] [CrossRef]
- Nass, C.; Moon, Y. Machines and mindlessness: Social responses to computers. J. Soc. Issues 2010, 56, 81–103. [Google Scholar] [CrossRef]
- Woods, S.; Dautenhann, K.; Sschultz, J. Exploring the design space of robots: Children’s perspectives. Interact. Comput. 2006, 18, 1390–1418. [Google Scholar] [CrossRef]
- Robertson, J. Gendering humanoid robots: Robo-sexism in Japan. Body Soc. 2010, 16, 1–36. [Google Scholar] [CrossRef]
- Schermerhorn, P.; Sscheutz, M.; Crowell, C.R. Robot social presence and gender: Do females view robots differently than males? In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction, New York Association for Computer Machining, Amsterdam, The Netherlands, 12–15 March 2008; pp. 263–270.
- Yeoman, I.; Michelle, M. Robots, men and sex tourism. Futures 2010, 44, 365–371. [Google Scholar] [CrossRef]
- Levy, D. Love and Sex with Robots; Harper Collins: New York, NY, USA, 2009. [Google Scholar]
- Levy, D. The ethics of robot prostitutes. In Robots Ethics: The Ethical and Social Implications of Robotics; MIT Press: Cambridge, MA, USA, 2012; pp. 223–231. [Google Scholar]
- Sullins, J.P. Robots, love, and sex: The ethics of building a love machine. IEEE Trans. Affect. Comput. 2012, 3, 398–409. [Google Scholar] [CrossRef]
- Whitby, B. Do You Want a Robot Lover? In The Ethics of Caring Technologies. Robot Ethics: The Ethical and Social Implications of Robotics; Lin, P., Keith, A., Bekey, G.A., Eds.; MIT Press: Cambridge, MA, USA, 2011; p. 233. [Google Scholar]
- Tao, J.; Tan, T. Affective computing: A review. In International Conference on Affective Computing and Intelligent Interaction; Springer: Berlin/Heidelberg, Germany, 2005; pp. 981–995. [Google Scholar]
- Gilbert, D.T.; Jones, E.E. Perceiver-Induced Constraint: Interpretations of Self-Generated Reality. J. Personal. Soc. Psychol. 1986, 50, 269–280. [Google Scholar] [CrossRef]
- Glenda, S.-G. Loving machines: Theorizing human and sociable-technology interaction. In International Conference on Human-Robot Personal Relationship; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–10. [Google Scholar]
© 2017 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laue, C. Familiar and Strange: Gender, Sex, and Love in the Uncanny Valley. Multimodal Technol. Interact. 2017, 1, 2. https://doi.org/10.3390/mti1010002
Laue C. Familiar and Strange: Gender, Sex, and Love in the Uncanny Valley. Multimodal Technologies and Interaction. 2017; 1(1):2. https://doi.org/10.3390/mti1010002
Chicago/Turabian StyleLaue, Cheyenne. 2017. "Familiar and Strange: Gender, Sex, and Love in the Uncanny Valley" Multimodal Technologies and Interaction 1, no. 1: 2. https://doi.org/10.3390/mti1010002
APA StyleLaue, C. (2017). Familiar and Strange: Gender, Sex, and Love in the Uncanny Valley. Multimodal Technologies and Interaction, 1(1), 2. https://doi.org/10.3390/mti1010002