
Stimulus Optimization for Softness Perception on a Friction-Variable Tactile Texture Display


Abstract
1. Introduction
2. Methods
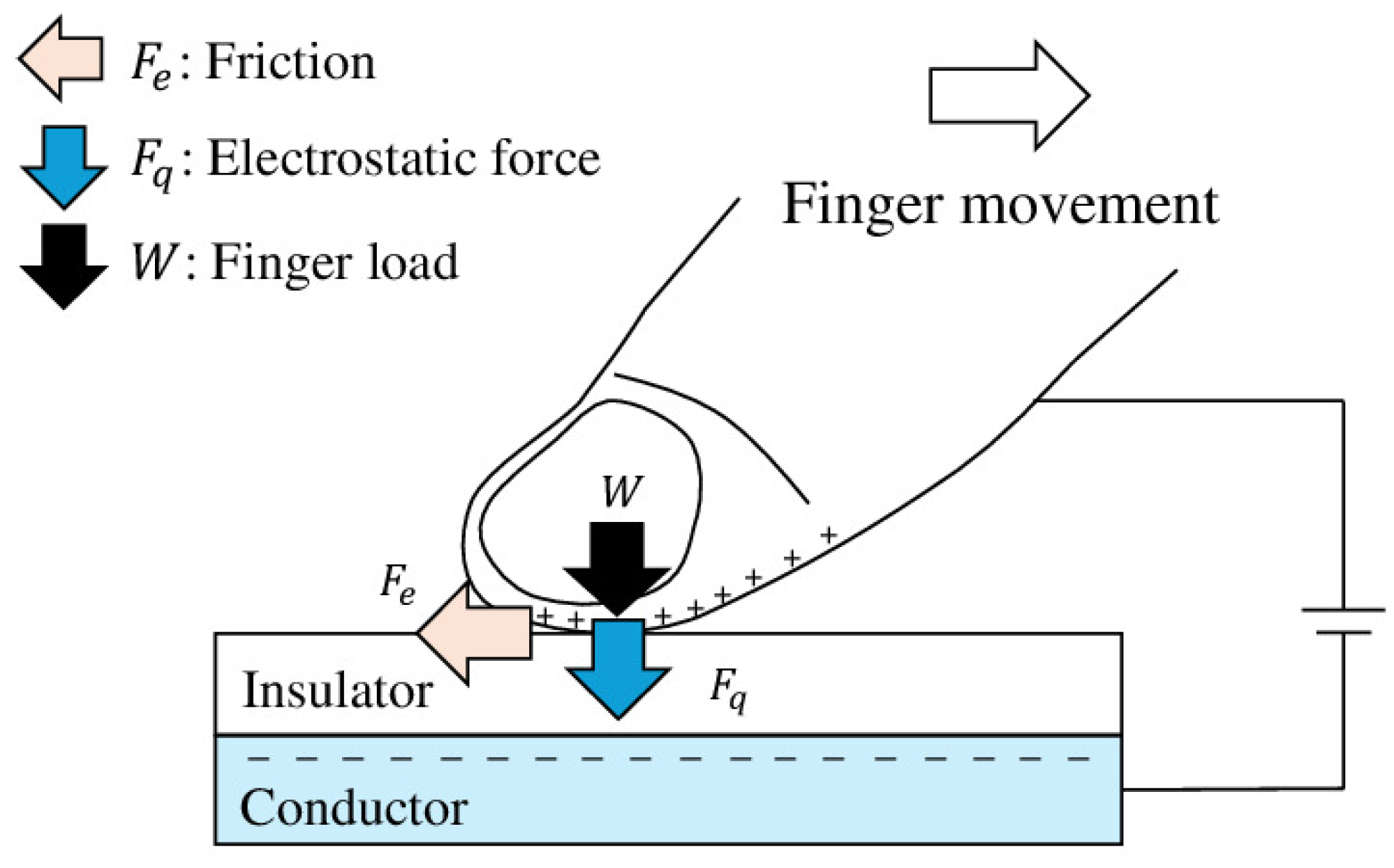
2.1. Apparatus: Tactile Texture Display
2.2. Tactile Stimuli
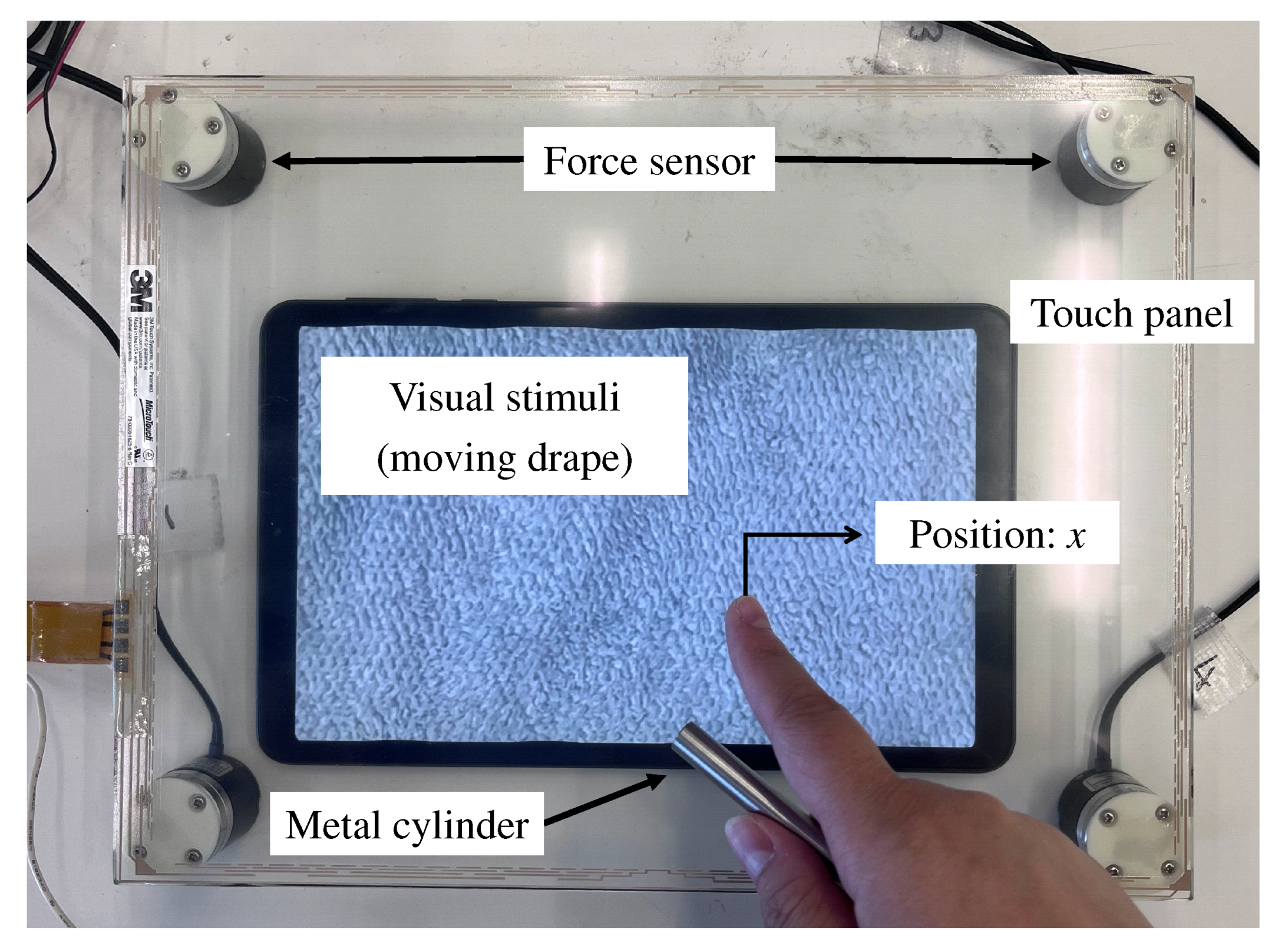
2.3. Visual Stimuli
2.4. Combination of Tactile and Visual Stimuli
2.5. Participants
2.6. Procedures
2.6.1. Experiment 1
2.6.2. Experiment 2
2.6.3. Experiment 3
2.7. Data Analysis
2.7.1. Experiment 1
- The optimal value suggested by the response surface fell within the parameter search range (finger speed: 50–250 mm, surface wavelength: 5–25 mm).
- The coefficient of determination for the response surface fitting was at least 0.49: . This value is the square of 0.7, which is the lower boundary of the range of strong correlation coefficient [66].
2.7.2. Experiment 2
2.7.3. Experiment 3
3. Results
3.1. Experiment 1
3.2. Experiment 2
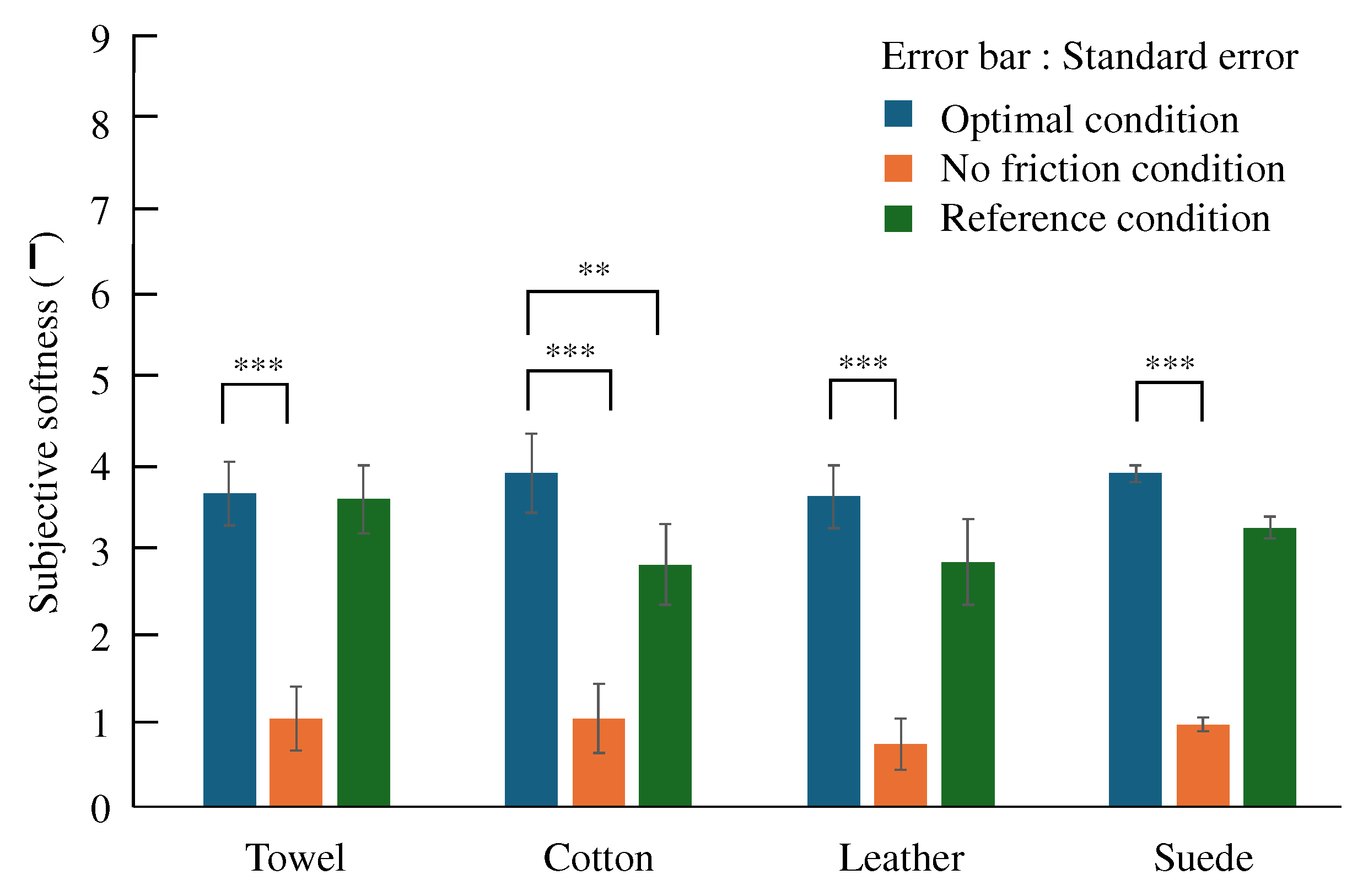
3.3. Experiment 3
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Basdogan, C.; Giraud, F.; Levesque, V.; Choi, S. A review of surface haptics: Enabling tactile effects on touch surfaces. IEEE Trans. Haptics 2020, 13, 450–470. [Google Scholar] [CrossRef]
- Otake, K.; Okamoto, S.; Akiyama, Y.; Yamada, Y. Tactile texture rendering for electrostatic friction displays: Incorporation of low-frequency friction model and high-frequency textural model. IEEE Trans. Haptics 2022, 15, 68–73. [Google Scholar] [CrossRef]
- Wiertlewski, M.; Lozada, J.; Hayward, V. The Spatial Spectrum of Tangential Skin Displacementcan Encode Tactual Texture. IEEE Trans. Robot. 2011, 27, 461–472. [Google Scholar] [CrossRef]
- Winfield, L.; Glassmire, J.; Colgate, J.E.; Peshkin, M. T-PaD: Tactile pattern display through variable friction reduction. In Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Tsukuba, Japan, 22–24 March 2007; pp. 421–426. [Google Scholar]
- Liu, G.; Zhang, C.; Sun, X. Tri-modal tactile display and its application into tactile perception of visualized surfaces. IEEE Trans. Haptics 2020, 13, 733–744. [Google Scholar] [CrossRef]
- Lévesque, V.; Oram, L.; MacLean, K.; Cockburn, A.; Marchuk, N.D.; Johnson, D.; Colgate, J.E.; Peshkin, M.A. Enhancing physicality in touch interaction with programmable friction. In Proceedings of the ACM SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 2481–2490. [Google Scholar]
- Breitschaft, S.J.; Pastukhov, A.; Carbon, C.C. Where’s my button? Evaluating the user experience of surface haptics in featureless automotive user interfaces. IEEE Trans. Haptics 2022, 15, 292–303. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.; Hwang, K.; Kim, S.; Sa, J.; Joung, M. Tactile effect design and evaluation for virtual buttons on a mobile device touchscreen. In Proceedings of the 13th International Conference on Human Computer Interaction with Mobile Devices and Services, Stockholm, Sweden, 30 August–2 September 2011; ACM: New York, NY, USA, 2011. MobileHCI’11. pp. 11–20. [Google Scholar] [CrossRef]
- Macdonald, S.; Freeman, E.; Pollick, F.; Brewster, S. Prototyping and evaluation of emotionally resonant vibrotactile comfort objects as a calming social anxiety intervention. ACM Trans. Comput.-Hum. Interact. 2024, 31, 1–48. [Google Scholar] [CrossRef]
- Blanc, C.; Buisson, J.C.; Kruck, J.; Kostrubiec, V. Haptic coordination: Squeezing a vibrating stress ball decreases anxiety and arousal. Hum. Mov. Sci. 2024, 96, 103220. [Google Scholar] [CrossRef]
- Ryu, S.; Pyo, D.; Lim, S.C.; Kwon, D.S. Mechanical Vibration Influences the Perception of Electrovibration. Sci. Rep. 2018, 8, 4555. [Google Scholar] [CrossRef]
- Hassen, R.; Gülecyüz, B.; Steinbach, E. PVC-SLP: Perceptual vibrotactile-signal compression based-on sparse linear prediction. IEEE Trans. Multimed. 2021, 23, 4455–4468. [Google Scholar] [CrossRef]
- Mullenbach, J.; Peshkin, M.; Colgate, J.E. eShiver: Lateral Force Feedback on Fingertips through Oscillatory Motion of an Electroadhesive Surface. IEEE Trans. Haptics 2017, 10, 358–370. [Google Scholar] [CrossRef]
- Vezzoli, E.; Amberg, M.; Giraud, F.; Lemaire-Semail, B. Electrovibration modeling analysis. In Haptics: Neuroscience, Devices, Modeling, and Applications; Springer: Berlin/Heidelberg, Germany, 2014; pp. 369–376. [Google Scholar] [CrossRef]
- Nakamura, T.; Yamamoto, A. A multi-user surface visuo-haptic display using electrostatic friction modulation and capacitive-type position sensing. IEEE Trans. Haptics 2016, 9, 311–322. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev, I.; Israr, A.; Harrison, C. TeslaTouch: Electrovibration for touch surfaces. In Proceedings of the Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 283–292. [Google Scholar]
- Smith, T.A.; Gorlewicz, J.L. HUE: A hybrid ultrasonic and electrostatic variable friction touchscreen. In Proceedings of the IEEE World Haptics Conference, Munich, Germany, 6–9 June 2017; pp. 635–640. [Google Scholar] [CrossRef]
- Wiertlewski, M.; Fenton Friesen, R.; Colgate, J.E. Partial squeeze film levitation modulates fingertip friction. Proc. Natl. Acad. Sci. USA 2016, 113, 9210–9215. [Google Scholar] [CrossRef]
- Ito, K.; Okamoto, S.; Yamada, Y.; Kajimoto, H. Tactile texture display with vibrotactile and electrostatic friction stimuli mixed at appropriate ratio presents better roughness textures. ACM Trans. Appl. Percept. 2019, 16, 20. [Google Scholar] [CrossRef]
- Bernard, C.; Ystad, S.; Monnoyer, J.; Wiertlewski, M. Detection of friction-modulated textures is limited by vibrotactile sensitivity. IEEE Trans. Haptics 2020, 13, 542–551. [Google Scholar] [CrossRef]
- Anwer, A.H.; Khan, N.; Ansari, M.Z.; Baek, S.S.; Yi, H.; Kim, S.; Noh, S.M.; Jeong, C. Recent advances in touch sensors for flexible wearable devices. Sensors 2022, 22, 4460. [Google Scholar] [CrossRef]
- Ouyang, C.; Liu, D.; He, K.; Kang, J. Recent advances in touch sensors for flexible displays. IEEE Open J. Nanotechnol. 2023, 4, 36–46. [Google Scholar] [CrossRef]
- Jiao, J.; Zhang, Y.; Wang, D.; Visell, Y.; Cao, D.; Guo, X.; Sun, X. Data-driven rendering of fabric textures on electrostatic tactile displays. In Proceedings of the IEEE Haptics Symposium, San Francisco, CA, USA, 25–28 March 2018; pp. 169–174. [Google Scholar]
- Jiao, J.; Wang, D.; Zhang, Y.; Cao, D.; Visell, Y.; Guo, X.; Sun, X. Detection and discrimination thresholds for haptic gratings on electrostatic tactile displays. IEEE Trans. Haptics 2019, 12, 34–42. [Google Scholar] [CrossRef]
- Li, M.; Sareh, S.; Xu, G.; Ridzuan, M.B.; Luo, S.; Xie, J.; Wurdemann, H.; Althoefer, K. Evaluation of pseudo-haptic interactions with soft objects in virtual environments. PLoS ONE 2016, 11, e0157681. [Google Scholar] [CrossRef]
- Yabe, S.I.; Kishino, H.; Kimura, T.; Nojima, T. Pseudo-haptic feedback on softness induced by squeezing action. In Proceedings of the IEEE World Haptics Conference, Munich, Germany, 6–9 June 2017; pp. 557–562. [Google Scholar] [CrossRef]
- Argelaguet, F.; Sato, T.; Duval, T.; Kitamura, Y.; Lécuyer, A. Collaborative pseudo-haptics: Two-user stiffness discrimination based on visual feedback. In Proceedings of the Haptics: Neuroscience, Devices, Modeling, and Applications, Versailles, France, 24–26 June 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 49–54. [Google Scholar] [CrossRef]
- Ban, Y.; Narumi, T.; Tanikawa, T.; Hirose, M. Controlling perceived stiffness of pinched objects using visual feedback of hand deformation. In Proceedings of the IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; pp. 557–562. [Google Scholar] [CrossRef]
- Konyo, M.; Yoshida, A.; Tadokoro, S.; Saiwaki, N. A tactile synthesis method using multiple frequency vibration for representing virtual touch. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3965–3971. [Google Scholar]
- Kim, G.; Okamoto, S.; Maruyama, H. Response surface of softness perceived via frictional tactile stimuli on flat touch-display. In Proceedings of the International Symposium on Affective Science and Engineering, Nagoya, Japan, 24–27 October 2017; p. PM–1B–04. [Google Scholar] [CrossRef]
- Ito, K.; Okamoto, S.; Elfekey, H.; Kajimoto, H.; Yamada, Y. Feeling softness on a hard touch panel using an electrostatic tactile texture display. In Proceedings of the IEEE 6th Global Conference on Consumer Electronics, Nagoya, Japan, 24–27 October 2017; pp. 282–283. [Google Scholar] [CrossRef]
- Ikeda, A.; Suzuki, T.; Takamatsu, J.; Ogasawara, T. Producing method of softness sensation by device vibration. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 3384–3389. [Google Scholar]
- Kim, G.; Okamoto, S.; Akiyama, Y.; Yamada, Y. Softness Presentation via Friction Force Control on Electrostatic Tactile Panel Display. In Proceedings of the IEEE 2nd Global Conference on Life Sciences and Technologies, Kyoto, Japan, 10–12 March 2020; pp. 219–221. [Google Scholar] [CrossRef]
- Chihara, A.; Azechi, M.; Kurita, A.; Okamoto, S. Soft feel presentation on touch panels using low-frequency friction stimuli. In Proceedings of the IEEE 13th Global Conference on Consumer Electronics, Kitakyushu, Japan, 29 October–1 November 2024; pp. 738–740. [Google Scholar] [CrossRef]
- Ochoa, J.; Torebjörk, E. Sensations evoked by intraneural microstimulation of single mechanoreceptor units innervating the human hand. J. Physiol. 1983, 342, 633–654. [Google Scholar] [CrossRef]
- Vallbo, A.B.; Johansson, R.S. Properties of cutaneous mechanoreceptors in the human hand related to touch sensation. Hum. Neurobiol. 1984, 3, 3–14. [Google Scholar]
- Iggo, A. Sensory receptors in the skin of mammals and their sensory functions. Rev. Neurol. 1985, 141, 599–613. [Google Scholar] [CrossRef] [PubMed]
- Kajimoto, H.; Kawakami, N.; Maeda, T.; Tachi, S. Tactile feeling display using functional electrical stimulation. In Proceedings of the International Conference on Artificial Reality and Telexistence, Tokyo, Japan, 16–18 December 1999. [Google Scholar]
- Wang, H.; Sun, Q.; Okamoto, S. Surface shape alters perceived material softness. i-Perception 2024, 15, 20416695241245021. [Google Scholar] [CrossRef] [PubMed]
- Qingyu Sun, H.W.; Okamoto, S. Designing macroscopic surface features perceived as soft during finger sliding. IEEE Access 2025, 13, 92965–92973. [Google Scholar] [CrossRef]
- Freeman, A.W.; Johnson, K.O. A model accounting for effects of vibratory amplitude on responses of cutaneous mechanoreceptors in macaque monkey. J. Physiol. 1982, 323, 43–64. [Google Scholar] [CrossRef]
- Bolanowski, S.J.; Gescheider, G.A.; Verrillo, R.T.; Checkosky, C.M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 1988, 84, 1680–1694. [Google Scholar] [CrossRef]
- Bicchi, A.; Schilingo, E.P.; De Rossi, D. Haptic discrimination of softness in teleoperation: The role of the contact area spread rate. IEEE Trans. Robot. Autom. 2000, 16, 496–504. [Google Scholar] [CrossRef]
- Scilingo, E.P.; Bianchi, M.; Grioli, G.; Bicchi, A. Rendering softness: Integration of kinesthetic and cutaneous information in a haptic device. IEEE Trans. Haptics 2010, 3, 109–118. [Google Scholar] [CrossRef]
- Inoue, K.; Okamoto, S.; Akiyama, Y.; Yamada, Y. Surfaces with finger-sized concave feel softer. IEEE Trans. Haptics 2022, 15, 32–38. [Google Scholar] [CrossRef]
- Mete, M.; Jeong, H.; Wang, W.D.; Paik, J. SORI: A softness-rendering interface to unravel the nature of softness perception. Proc. Natl. Acad. Sci. USA 2024, 121, e2314901121. [Google Scholar] [CrossRef]
- Johansson, R.S.; Vallbo, Å.B. Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci. 1983, 6, 27–32. [Google Scholar] [CrossRef]
- Blake, D.T.; Hsiao, S.S.; Johnson, K.O. Neural coding mechanisms in tactile pattern recognition: The relative contributions of slowly and rapidly adapting mechanoreceptors to perceived roughness. J. Neurosci. 1997, 17, 7480–7489. [Google Scholar] [CrossRef] [PubMed]
- Bouman, K.L.; Xiao, B.; Battaglia, P.; Freeman, W.T. Estimating the material properties of fabric from video. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 1984–1991. [Google Scholar] [CrossRef]
- Jimba, N.; Ishikawa, T.; Yanagida, Y.; Mori, H.; Sasaki, K.; Ayama, M. Visual ratings of “softness/hardness” of rotating fabrics. Int. J. Cloth. Sci. Technol. 2019, 32, 48–62. [Google Scholar] [CrossRef]
- Nagano, H.; Okamoto, S.; Yamada, Y. Haptic invitation of textures: Perceptually prominent properties of materials determine human touch motions. IEEE Trans. Haptics 2014, 7, 345–355. [Google Scholar] [CrossRef] [PubMed]
- Cavdan, M.; Doerschner, K.; Drewing, K. Task and material properties interactively affect softness explorations along different dimensions. IEEE Trans. Haptics 2021, 14, 603–614. [Google Scholar] [CrossRef]
- Yokosaka, T.; Kuroki, S.; Watanabe, J.; Nishida, S. Linkage between free exploratory movements and subjective tactile ratings. IEEE Trans. Haptics 2017, 10, 217–225. [Google Scholar] [CrossRef] [PubMed]
- Mallinckrodt, E.; Hughes, A.L.; Sleator, J.W. Perception by the skin of electrically induced vibrations. Science 1953, 118, 277–278. [Google Scholar] [CrossRef]
- Strong, R.M.; Troxel, D.E. An electrotactile display. IEEE Trans. Man-Mach. Syst. 1970, 11, 72–79. [Google Scholar] [CrossRef]
- Persson, B.N.J. The dependency of adhesion and friction on electrostatic attraction. J. Chem. Phys. 2018, 148, 144701. [Google Scholar] [CrossRef]
- Azechi, M.; Okamoto, S. Combined virtual bumps and textures on electrostatic friction tactile displays. In Proceedings of the IEEE 11th Global Conference on Consumer Electronics, Osaka, Japan, 18–21 October 2022; pp. 315–317. [Google Scholar] [CrossRef]
- Fan, S.; Shen, Z.; Koenig, B.L.; Ng, T.T.; Kankanhalli, M.S. When and why static images are more effective than videos. IEEE Trans. Affect. Comput. 2020, 14, 308–320. [Google Scholar] [CrossRef]
- Kawabe, T.; Maruya, K.; Fleming, R.W.; Nishida, S. Seeing liquids from visual motion. Vis. Res. 2015, 109, 125–138. [Google Scholar] [CrossRef]
- Li, X.; Kurashiki, T.; Fukuda, M. Effects of design parameters on click characteristics of a round-type diaphragm for push momentary switch. J. Adv. Mech. Des. Syst. Manuf. 2013, 7, 268–281. [Google Scholar] [CrossRef]
- Yamada, S.; Okamoto, S.; Ogura, Y.; Kosuge, Y. Optimal design of a haptic popping toy using response surface. J. Adv. Mech. Des. Syst. Manuf. 2024, 18, JAMDSM0014. [Google Scholar] [CrossRef]
- Khuri, A.I.; Mukhopadhyay, S. Response surface methodology. Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 128–149. [Google Scholar] [CrossRef]
- Bhattacharya, S. Central Composite Design for response surface methodology and its application in pharmacy. In Response Surface Methodology in Engineering Science; Kayaroganam, P., Ed.; IntechOpen: Londen, UK, 2021. [Google Scholar] [CrossRef]
- Azari, A.; Mesdaghinia, A.; Ghanizadeh, G.; Masoumbeigi, H.; Pirsaheb, M.; Ghafari, H.R.; Khosravi, T.; Sharafi, K. Which is better for optimizing the biosorption process of lead—Central composite design or the Taguchi technique? Water Sci. Technol. 2016, 74, 1446–1456. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef] [PubMed]
- Mukaka, M.M. Statistics corner: A guide to appropriate use of correlation coefficient in medical research. Malawi Med. J. 2012, 24, 69–71. [Google Scholar]
- Tanaka, Y.; Bergmann Tiest, W.M.; Kappers, A.M.L.; Sano, A. Contact force and scanning velocity during active roughness perception. PLoS ONE 2014, 9, e93363. [Google Scholar] [CrossRef]
- Bhat, K.S.; Twigg, C.D.; Hodgins, J.K.; Khosla, P.K.; Popović, Z.; Seitz, S.M. Estimating cloth simulation parameters from video. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; pp. 37–51. [Google Scholar]
- Jang, S.Y.; Ha, J. The influence of tactile information on the human evaluation of tactile properties. Fash. Text. 2021, 8, 39. [Google Scholar] [CrossRef]
- Hosoi, J.; Jin, D.; Ban, Y.; Warisawa, S. Voluminous fur stroking experience through interactive visuo-haptic model in virtual reality. IEEE Trans. Haptics 2025, 18, 232–243. [Google Scholar] [CrossRef]
- Arakawa, N.; Watanabe, T.; Fukushima, K.; Matsumoto, Y.; Nakatani, M. Talk to us about your skin: The relationship between spoken language and haptic exploratory procedures. Int. J. Cosmet. Sci. 2024, 46, 437–456. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Pair | F-Value | p-Value | Adjusted p-Value | Effect Size () | ||
|---|---|---|---|---|---|---|
| Towel | vs. | Cotton | 1.60 | 1.00 | 0.14 | |
| Towel | vs. | Synthetic leather | 0.98 | 1.00 | 0.094 | |
| Towel | vs. | Suede | 8.28 | 0.47 | ||
| Cotton | vs. | Synthetic leather | 3.90 | 0.34 | ||
| Cotton | vs. | Suede | 1.79 | 1.00 | 0.17 | |
| Synthetic leather | vs. | Suede | 13.15 | 0.61 | ||
| Cloth | Comparison Pair | t-Value | p-Value | Adjusted p-Value |
|---|---|---|---|---|
| Towel | Optimal vs. Reference | 0.16 | 1.00 | |
| Optimal vs. No friction | 5.23 | |||
| Cotton | Optimal vs. Reference | 3.30 | ||
| Optimal vs. No friction | 6.55 | |||
| Leather | Optimal vs. Reference | 2.37 | ||
| Optimal vs. No friction | 7.72 | |||
| Suede | Optimal vs. Reference | 1.82 | ||
| Optimal vs. No friction | 7.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chihara, A.; Okamoto, S.; Kurita, A. Stimulus Optimization for Softness Perception on a Friction-Variable Tactile Texture Display. Sci 2025, 7, 96. https://doi.org/10.3390/sci7030096
Chihara A, Okamoto S, Kurita A. Stimulus Optimization for Softness Perception on a Friction-Variable Tactile Texture Display. Sci. 2025; 7(3):96. https://doi.org/10.3390/sci7030096
Chicago/Turabian StyleChihara, Ami, Shogo Okamoto, and Ai Kurita. 2025. "Stimulus Optimization for Softness Perception on a Friction-Variable Tactile Texture Display" Sci 7, no. 3: 96. https://doi.org/10.3390/sci7030096
APA StyleChihara, A., Okamoto, S., & Kurita, A. (2025). Stimulus Optimization for Softness Perception on a Friction-Variable Tactile Texture Display. Sci, 7(3), 96. https://doi.org/10.3390/sci7030096