1. Introduction
The increasing global energy demand presents significant challenges for sustainable development as traditional energy sources continue to strain the environment. This growing consumption of energy, coupled with the finite nature of fossil fuels, has intensified the need for cleaner, renewable energy alternatives [
1]. Among these, hydrokinetic energy, which harnesses the natural kinetic energy of moving water, has emerged as a promising solution. Hydrokinetic power generation offers a different approach compared to traditional hydroelectric methods. Instead of relying on massive dams and water storage, these systems harness the natural flow of water. This distinction makes them a gentler option for the environment and allows them to be used in a wider range of water bodies [
2,
3].
Hydrokinetic energy can be extracted from natural and artificial water bodies such as rivers, canals, and ocean currents. These resources offer vast untapped potential for generating electricity in a sustainable manner. Specifically, hydrokinetic turbines, designed to capture energy from flowing water without extensive infrastructure, are playing a crucial role in advancing renewable energy technology [
4,
5]. One such innovation is the Archimedean spiral hydrokinetic turbine (ASHT), which is designed to operate efficiently in low-velocity water flows. Its simple yet effective design enables it to harness energy from currents in rivers, tidal flows, and artificial channels [
6].
Other common hydrokinetic turbine technologies include horizontal-axis hydrokinetic turbines (HAHTs) and vertical-axis hydrokinetic turbines (VAHTs). HAHTs, which operate similarly to wind turbines, are known for their high efficiency in unidirectional and steady flow environments, with typical power coefficient of performance (
) ranging from 0.35 to 0.45 [
7]. VAHTs, such as Darrieus and Savonius turbines, can operate in multidirectional flows and require less alignment with the flow direction but often exhibit lower
values, typically between 0.2 and 0.35, depending on the design [
8]. In comparison, ASHTs offer unique advantages for shallow or confined water bodies due to their compact geometry and low start-up velocity requirements. While their
values are generally slightly lower than those of HAHTs, recent optimization efforts, including the present study, aim to bridge this gap, improving the ASHT’s competitiveness as a viable solution for decentralized and low-head hydrokinetic energy applications.
Currently, several relevant studies focus on the ASHT, examining design processes, numerical simulation, and experimental evaluation. It is important to note that this technology remains in the early stages of development, with limited studies specifically addressing the application of the Archimedean spiral in hydrokinetic contexts. Research on the ASHT has evolved primarily from earlier studies on the Archimedean spiral wind turbine (ASWT). For instance, in wind turbine applications, these foundational studies have provided valuable insights that have informed the initial design parameters of the ASHT, guiding its adaptation for hydrokinetic energy generation. For example, the ASWT’s performance has been analyzed at different blade inclination angles (
). In this analysis,
was set at values of 65°, 60°, 55°, and 50° [
9]. The highest
observed was 0.22 at a tip speed ratio (
or
) of 1.71 when
was 50°. Labib and colleagues determined that the highest Cp values occurred at lower
values [
9]. Another comparative study examined two distinct ASWT configurations: one with blades fixed at a 60° angle and the other with variable blade angles of 30°, 45°, and 60° [
10]. Applying computational fluid dynamics (CFDs) simulations, the study found that the turbine with variable-angle blades obtained a maximum
of 0.226 at a
of 1.96, while the turbine with fixed-angle blades reached a maximum
of 0.207 at a
of 1.57. This represented a 9.18% increase in
. Furthermore, the authors noted that the first and third blades played a crucial role in maximizing energy extraction, specifically in wind energy applications [
9].
The performance assessment of ASHT has been the central point of numerous studies documented in the literature. Suntivarakorn et al. investigated their design and operation for low-head hydropower generation. The researchers optimized the blade geometry, specifically the number of blades and the diameter-to-length ratio. A spiral turbine with a 2/3 diameter-to-length ratio and three blades exhibited superior performance. This design reached its peak torque output at a water flow speed of 1 m/s and achieved an optimal efficiency of 48% [
11].
Monatrakul and Suntivarakorn investigated the operation of spiral turbines with varying of
for low-head hydropower applications. CFDs were employed to analyze the impact of
(15°, 18°, 21°, and 30°) on turbine efficiency under different water velocities. The results indicated that a blade angle of 21° yielded the highest torque in free-flow conditions. However, when a collection chamber was incorporated, a blade angle of 30° resulted in the highest efficiency, significantly surpassing the performance of a conventional three-bladed axial turbine [
12]. Rat et al. explored the adaptation of the Archimedes spiral turbine, traditionally used in wind energy, to generate electricity from the kinetic energy of small rivers and streams. The turbine was directly coupled to a permanent magnet synchronous generator (PMSG) to convert the mechanical energy into electrical power. The system (turbine and PMSG) was simulated using MATLAB/Simulink to analyze its performance under various water flow conditions. The results showed that the turbine exhibits a rapid response to changes in water flow, with the angular speed and torque quickly stabilizing [
13]. Rajbanshi et al. numerically investigated the influence of water velocity on turbine performance. Their findings revealed that increasing the water velocity from 1 to 2 m/s led to a substantial increase in the generated force and torque, with values ranging from 6.498 N to 25.974 N and 0.0725 Nm to 0.291 Nm, respectively. However, this increase in power output was accompanied by a decrease in turbine efficiency, which dropped from 37.81% at the lowest velocity to 18.96% at the highest velocity [
14]. Badawy et al. employed CFDs to simulate and design an ASHT. The authors selected five NACA series profiles: 4401, 4405, 65107, 4403, and 4407, to evaluate their performance based on a
of two for a turbine blade with a NACA 4401 profile [
15].
Monatrakul et al. investigated the performance of spiral turbines with different
(18° and 21°) for low-head hydropower generation. Laboratory experiments and field tests were conducted to evaluate the efficiency and power output of these turbines under various water flow conditions. The findings demonstrated that 21° achieved the greatest efficiency, especially when dealing with faster water flow. Moreover, integrating this turbine with a straight duct followed by a diffuser and a nozzle chamber emerged as the optimal arrangement, producing substantial power even in slower-moving water [
16]. A study contrasting the performance of ducted (DASHT) and non-ducted (ASHT) Archimedes spiral hydrokinetic turbines was presented by Song et al., highlighting significant differences in their energy capture capabilities. The ASHT, inspired by technologies like the ASWT, operates efficiently at lower speeds due to the higher density of water, achieving a maximum
of 0.237 at a
of 1.5. In contrast, the DASHT demonstrates a remarkable improvement, reaching a maximum
of 0.525 at a
of 2.5, which represents a 122% increase in performance compared to the ASHT [
6].
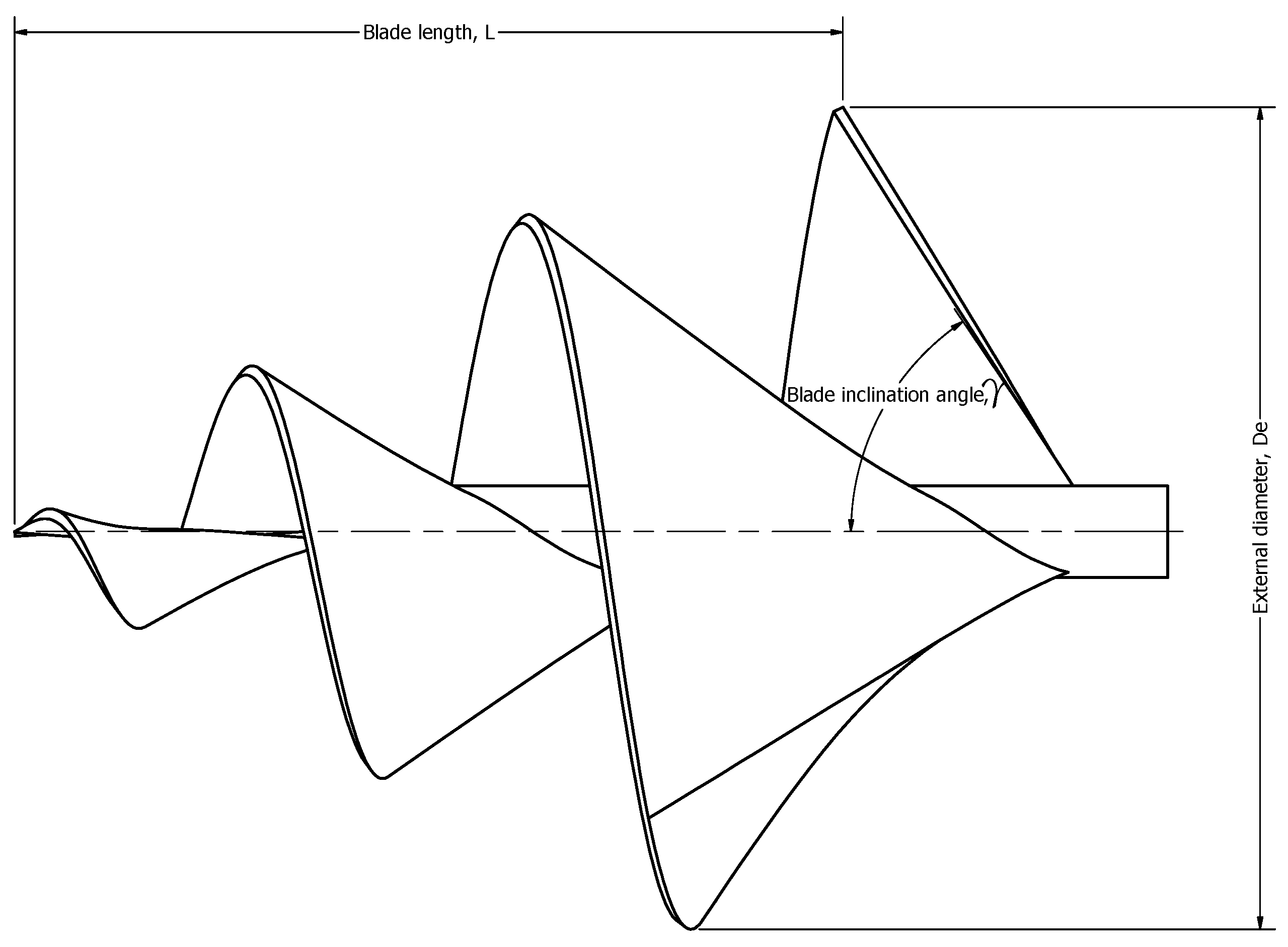
According to the literature review, the performance of ASHT is a function of its design parameters and operational conditions. Key parameters such as the diameter of the rotor, , the length of the blade, and the number of blades have a direct impact on the turbine’s energy-capturing efficiency. Therefore, the optimization of the turbine’s geometry is critical to maximize its power output and operational efficiency under different water flow conditions. Despite these insights, most existing studies have explored the influence of these parameters individually or through limited combinations. This research gap highlights the novelty of applying response surface methodology (RSM) to enhance the turbine’s efficiency by simultaneously optimizing three key geometric parameters: blade length (L), blade inclination angle (), and external diameter (). This integrated approach provides a more comprehensive understanding of their combined effects on the power coefficient (), which has not been thoroughly explored in previous research.
RSM, a widely recognized statistical approach, serves to optimize intricate systems influenced by numerous factors [
17,
18]. In this study, a central composite design (CCD) will be specifically employed as the experimental design framework. The CCD allows for the efficient exploration of the design space by systematically varying the turbine’s key parameters, thus generating data that help model the relationship between these factors and the turbine’s performance. One advantage of CCD is its ability to fit a quadratic model, which provides a more accurate representation of nonlinear effects in the system. Additionally, CCD requires fewer experimental runs than a full factorial design, which reduces both time and resource consumption. However, one disadvantage is that the quality of the model may be sensitive to experimental noise or inaccuracies in the measurement of responses, which can affect the reliability of the optimization results.
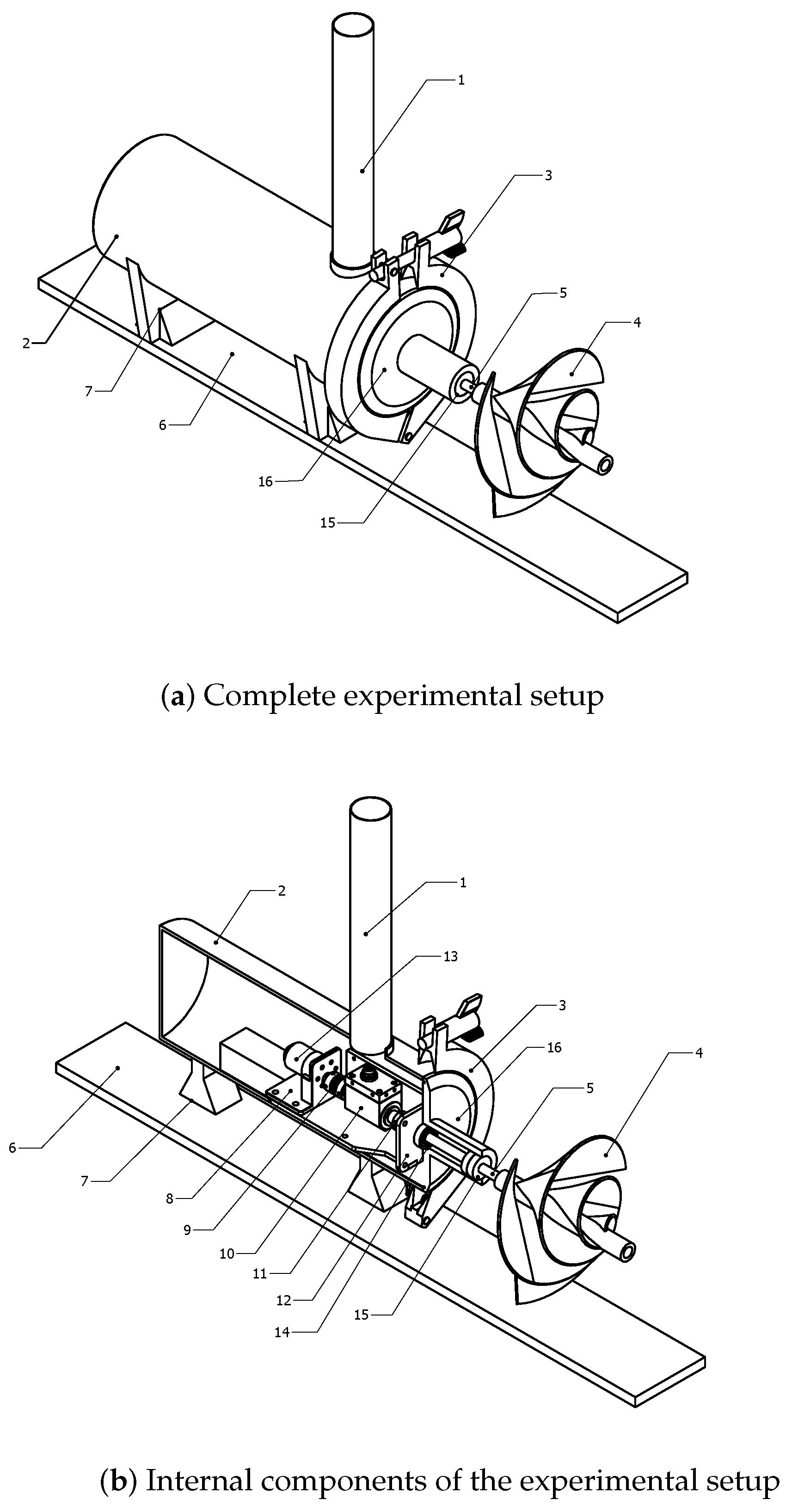
The novelty of this work also lies in the combination of statistical optimization with experimental validation, offering both a predictive and practical contribution to the field. Following the optimization process, the design resulting from the experimental methodology will undergo experimental validation in a controlled environment. The optimized turbine will be tested in a hydraulic channel, simulating real-world conditions to evaluate its performance. This experimental validation is crucial to ensure that the optimized design performs as predicted under actual operating conditions, providing a robust foundation for future real-world applications.
3. Results
3.1. Numerical Results
Table 4 shows the maximum numerical power coefficient,
, for each of the 17 study treatments. Treatment 2, with a
value of 0.337, exhibits the highest
among all treatments.
From the results in
Table 4, it can be inferred that there is no direct relationship between any of the parameters and
. Increasing or decreasing a parameter does not guarantee, by default, an increase in the power coefficient. Additionally, there are multiple configurations with relatively high
values (Treatment 2, Treatment 5, Treatment 6, and Treatment 11), indicating that optimization is a multivariable and complex problem. Given that the
values are very close for some treatments, for example, Treatment 2 has a
of 0.337 and Treatment 11 has a
of 0.333. This suggests that small modifications in the independent factors can have a significant impact on the turbine’s performance.
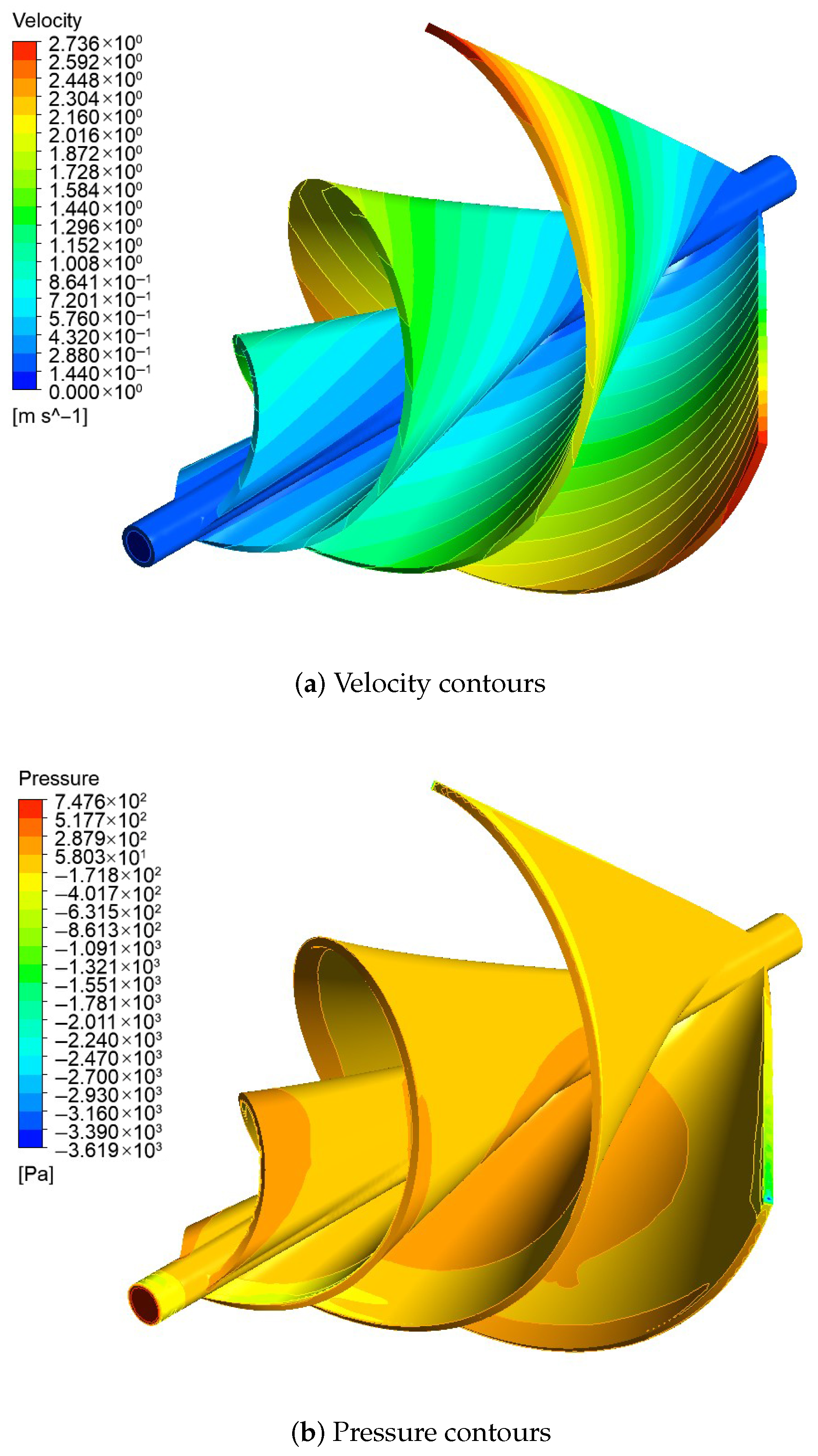
Figure 10 presents the velocity and pressure contours for Treatment 2. In the presented figures, the color spectrum denotes the intensity of the velocity or pressure fields. Warmer tones correspond to greater magnitudes, while cooler tones signify lesser values.
Figure 10a reveals that high-velocity regions are concentrated near the blade tips, while low-velocity regions occur in stagnation zones and flow separation regions.
Figure 10b demonstrates that the fluid impinging on the rotor blades results in high-pressure regions, whereas regions of low pressure correspond to zones of fluid acceleration.
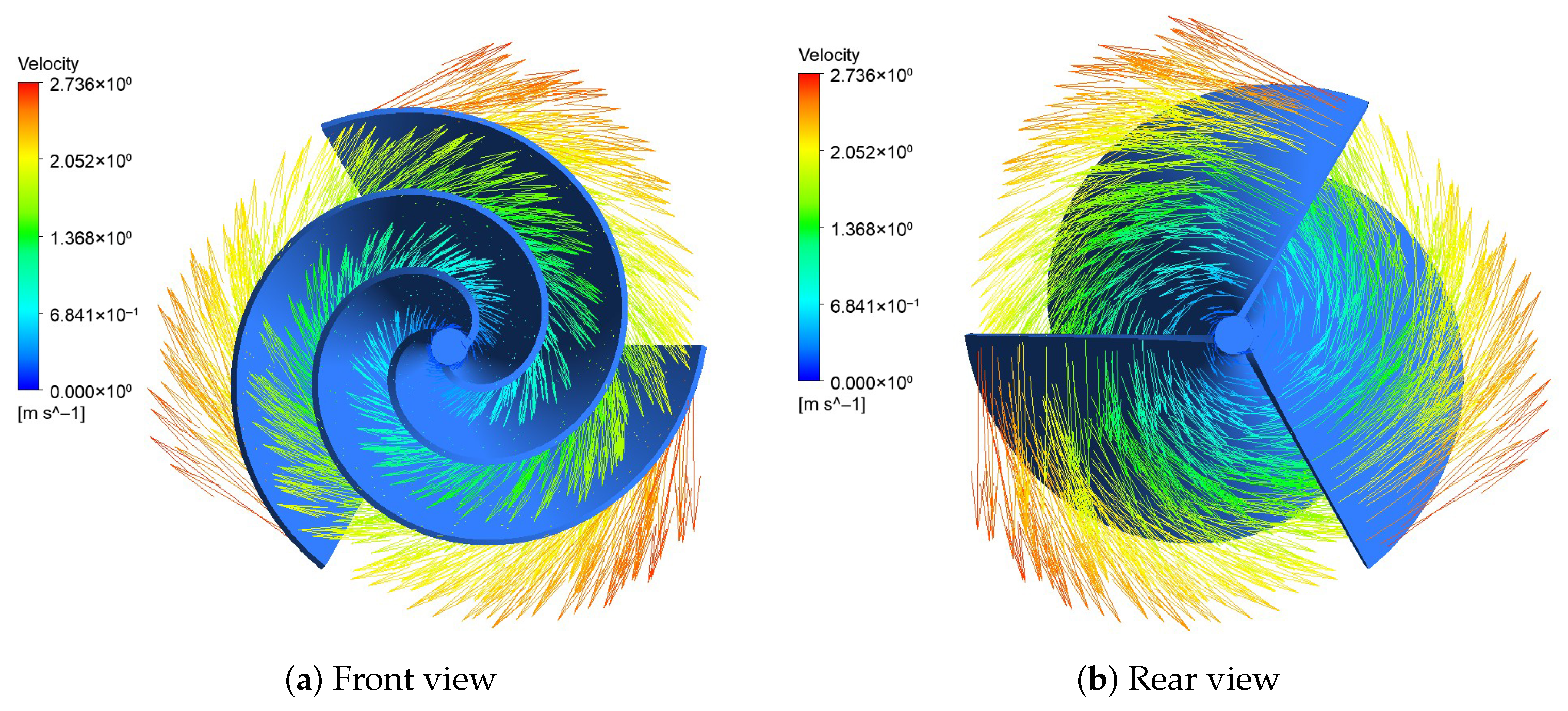
Figure 11 shows the velocity vectors exiting the rotor in the rear and front views. The velocity vectors show the direction and magnitude of the fluid flow as it inlets and exits the rotor. We can observe the formation of a swirling flow pattern, which is characteristic of many types of rotating machinery. The color coding reveals the distribution of velocities across the rotor inlet and exit plane. It can be seen that the velocity is higher near the blade tips and lower near the hub.
Given the complexity of the problem presented in
Table 4, a more in-depth statistical analysis will be conducted using the open-source statistical software R 2024.12.0. This analysis aims to identify the optimal combination of factors that maximizes the power coefficient,
.
3.2. Statistical Analysis
3.2.1. Regression Model Development
A regression model was constructed using
from
Table 4 and analyzed through ANOVA. This approach allowed for identifying the contribution of each term within the model. To evaluate the model’s effectiveness in accurately reflecting the numerical results, several statistical metrics were considered: the correlation coefficient (
), the adjusted correlation coefficient (
), and the
p-value of the model. Given the potential for nonlinear relationships and the possibility of interactions among the predictors, a second-order regression model was deemed the most appropriate choice for this analysis. This model allows for the inclusion of both linear and quadratic terms, as well as interaction terms, to account for more complex relationships.
Table 5 shows the results of ANOVA for the second-order model, which examines the relationship between the response variable and the independent variables.
The small p-value (0.0000312) strongly suggests that the overall model is statistically significant, implying its ability to account for a considerable amount of the variation observed in the response variable. The linear components ( and L) and the quadratic components (, , and ) exhibit high statistical significance (very small p-values), indicating that both their direct and squared effects play a crucial role in explaining the changes in the response. Conversely, the interaction components (, , and ) are not statistically significant (p-value exceeding 0.05), suggesting that the combined effects of these variable pairs do not meaningfully contribute to the model’s explanatory power. The ‘error’ component represents the portion of the response variability that the model does not explain. The small mean squared error suggests a good agreement between the predictions and the actual data. Considering these results, we can infer that the second-order regression model is appropriate for describing the relationship between and the independent variables.
Among the studied factors, the blade inclination angle () had the most significant influence on , with a p-value of 0.00000591. Physically, this strong influence is due to the angle’s critical role in determining how the incoming water flow interacts with the turbine blades. The inclination directly affects the alignment of the blade surfaces relative to the flow direction, which governs the efficiency of momentum transfer from the fluid to the rotor. An optimal angle maximizes the hydrodynamic thrust while minimizing flow separation and energy losses, thereby enhancing the conversion of kinetic energy into mechanical rotation.
The blade length (L), with a p-value of 0.0000207, also exhibits a statistically significant impact on . From a physical standpoint, the length of the turbine determines the volume of fluid that interacts with the screw per unit of time. Longer blades increase the surface area available for fluid contact, enabling greater momentum exchange. Additionally, a longer turbine allows for an extended fluid-structure interaction path, enhancing energy capture. However, beyond a certain point, increases in length may lead to structural limitations or frictional losses, highlighting the importance of optimizing this parameter within practical constraints.
The external diameter () showed a statistically significant, albeit comparatively lower, influence on , with a p-value of 0.001022. Physically, defines the frontal area through which the turbine intercepts the incoming water flow, directly affecting the amount of kinetic energy available for extraction. A larger diameter increases the swept area, thereby enhancing the theoretical energy capture potential. However, this geometric increase also brings certain trade-offs: a larger leads to greater rotational inertia, which can reduce the responsiveness of the rotor to changes in flow velocity. Additionally, it may result in higher frictional losses due to proximity to channel walls and the generation of unutilized secondary flows. These effects can limit the practical gains in efficiency, underscoring the need to balance energy capture with hydrodynamic and mechanical losses when selecting the optimal diameter.
Beyond the analysis of variance findings detailed in
Table 5, the second-order regression model yielded an
value of 0.9814. This signifies that the model accounts for roughly 98.14% of the variance in the response. The
, which accounts for the number of predictors in the model, was 0.9574. This suggests strong generalizability of the model to unseen data and confirms the importance of the incorporated variables in elucidating the observed variation. Based on the ANOVA results, Equation (
8) represents the final regression model developed. This model was selected as it provided the best fit to the data and was statistically significant.
3.2.2. Assumption Verification
To validate the second-order regression model, several diagnostic checks are typically performed. Key assumptions to check include linearity, homoscedasticity, and normality of residuals [
67,
68]. Violation of these assumptions can undermine the model’s reliability and may require adjustments or the use of alternative modeling techniques. Validating a regression model is essential, as it assesses how effectively the model fits the data and predicts new, unseen observations. A thoroughly validated model ensures greater reliability and accuracy in its results [
69].
A fundamental assumption in linear regression is that the residuals are normally distributed. To assess this assumption, various statistical tests and graphical methods are employed. Normality tests, such as the Shapiro–Wilk, Jarque–Bera, and Cramer–von Mises tests, provide
p-values indicating the likelihood of observing the data if the residuals were truly normally distributed [
70,
71]. Small
p-values suggest a significant departure from normality. Additionally, visual inspection of a histogram of the residuals can reveal skewness or excess kurtosis. A Q–Q plot allows for a comparison of the empirical distribution of the residuals to a theoretical normal distribution; significant deviations from the diagonal line cast doubt on the normality assumption. Non-normal residuals can compromise the validity of statistical inferences based on the model and the accuracy of confidence intervals.
Figure 12 shows the Frequency Distribution and Q–Q Plot, while
Table 6 provides the results of the normality tests for the response variable.
The histogram of the residuals,
Figure 12a, shows a roughly bell-shaped distribution, which is indicative of a normal distribution. However, there seems to be a slight right skew, suggesting that there might be a few outliers or that the distribution is not perfectly symmetric. The Q–Q plot,
Figure 12b, shows that the majority of the points fall approximately along the diagonal line, indicating a reasonable fit to a normal distribution. However, there are some deviations at the tails, particularly in the upper right quadrant, which could suggest slightly heavier tails than a normal distribution. The
p-values from the various normality tests, in
Table 6, are generally quite high, indicating that it fails to reject the null hypothesis of normality. This means that there is not enough evidence to conclude that the residuals are significantly different from a normal distribution. However, it is worth noting that some of the
p-values are closer to the significance level (e.g., 0.05), which could suggest a borderline case. Overall, the evidence suggests that the residuals are reasonably normally distributed.
Before proceeding further with the regression analysis, it must verify the assumption of independent errors. Autocorrelation, or correlation between successive error terms, can lead to biased estimates and unreliable confidence intervals. To test for autocorrelation, it uses the Durbin–Watson test. This test provided a
p-value that tells if there is significant evidence of autocorrelation [
72,
73]. If the
p-value is less than the chosen significance level, it concludes that the residuals are not independent, suggesting that it may need to adjust the model. The test produced a
p-value of 0.255, suggesting that the independence assumption, meaning there is no self-correlation in the errors, holds true, and we fail to reject it.
To finalize the examination of the regression model’s underlying assumptions, evaluating the assumption of consistent error variance, or homoscedasticity, is crucial. Breaches of this assumption, termed heteroscedasticity, can lead to skewed standard errors and untrustworthy hypothesis tests, potentially undermining the accuracy of the model’s conclusions [
74]. The Breusch–Pagan test is a frequently used method for identifying heteroscedasticity. A
p-value from this test below the selected significance level suggests the existence of heteroscedasticity, implying that the model might need modifications, such as data transformation or the use of robust standard errors, to guarantee more dependable outcomes. Given a
p-value of 0.431, the constant variance assumption is met.
Table 7 provides a comparison between the results obtained from simulations and those predicted by the regression model, presenting the residual values.
3.2.3. Determination of the Optimal Point
Having developed and validated a second-order regression model, it can now utilize the resulting equation to determine the ideal combination of independent variables that maximizes
. This is the last step in the response surface methodology optimization process. Statgraphics Centurion XVII software was employed to determine the optimal combination of factor levels.
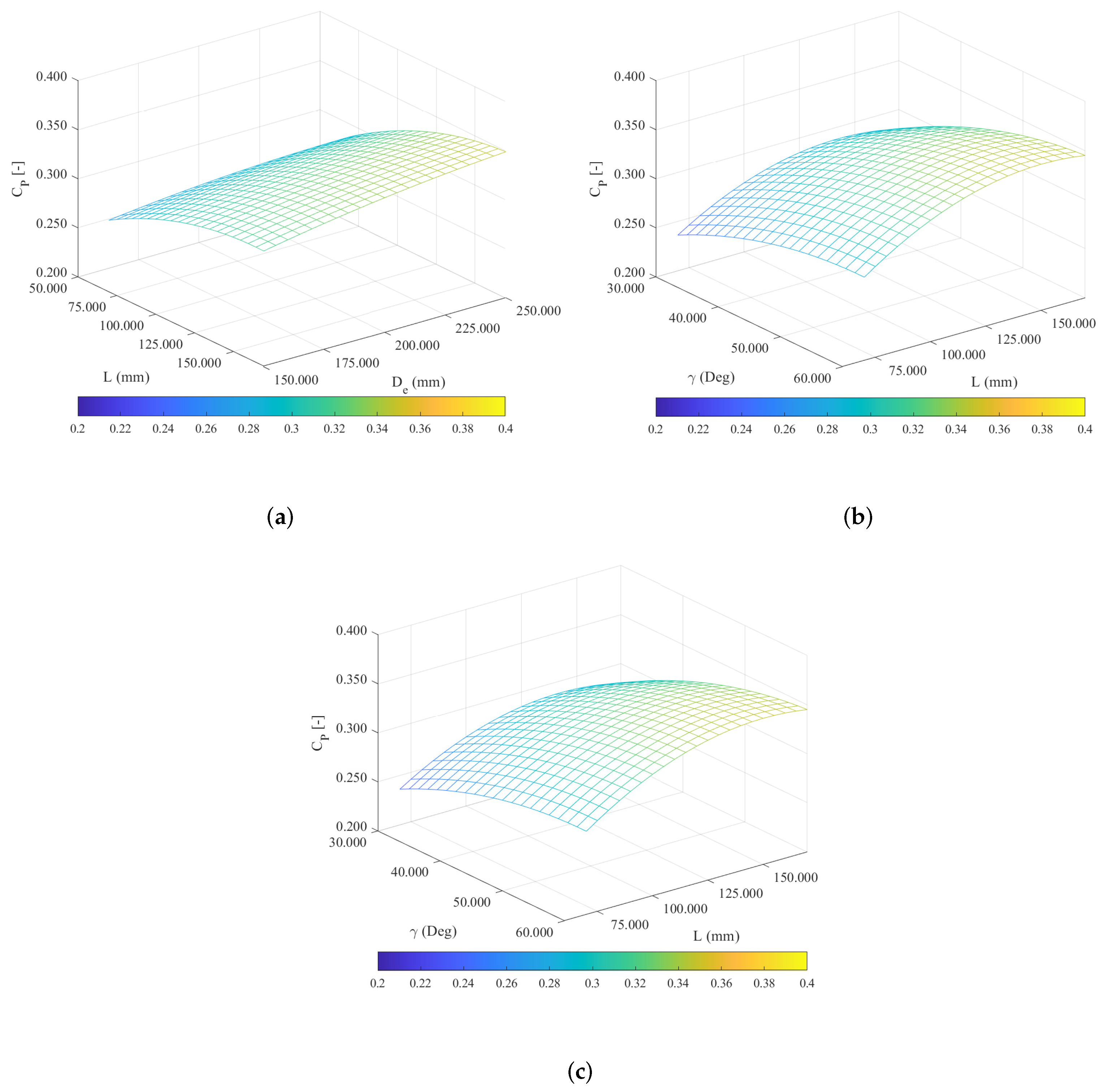
Figure 13 shows the response surface from the optimization process.
Figure 13a illustrates the influence of
L and
on
. The surface exhibits a general upward trend as both
L and
increase, suggesting that higher values of
L and
tend to yield higher values of
. The curved nature of the surface indicates a nonlinear relationship between
L,
, and
, revealing an interaction between these two factors. The effect of varying
L on
is dependent on the value of
, and vice versa.
Figure 13b displays the impact of
L and
on
. Similar to
Figure 13a, an upward trend is observed as both
L and
increase. The highest regions of the surface correspond to combinations of
L and
that produce the maximum values of
, whereas the lowest regions correspond to combinations yielding the minimum values of
.
Figure 13c demonstrates a similar behavior to
Figure 13a,b, where, in general, increasing values of
and
tend to increase the value of
. There likely exist specific regions within the design space (combinations of
L,
, and
) where maximum
values are achieved, even if these values do not correspond to the maximum limits for each individual factor. These optimal regions may vary depending on the interactions between the variables and the constraints of the system. The optimization process yielded the following optimal values:
mm,
mm, and
°. These settings resulted in a maximum
value of 0.347. The values obtained do not attain the upper bounds of each independent variable.
Table 8 presents a comparison of the values for
L,
, and
between the ideal model obtained from the regression model and the model with the highest
from the initial treatments, Treatment 2; this is also the treatment where the maximum values for each factor are used.
The optimal point outperforms Treatment 2 by 2.97% in terms of , demonstrating that intermediate values and precise adjustments of L and are crucial for maximizing system performance. This indicates that the regression model effectively identifies factor combinations enhancing system performance.
3.3. Experimental Results
To assess the optimized turbine’s performance, multiple laboratory tests were implemented with a flow velocity of 0.5 m/s in the channel.
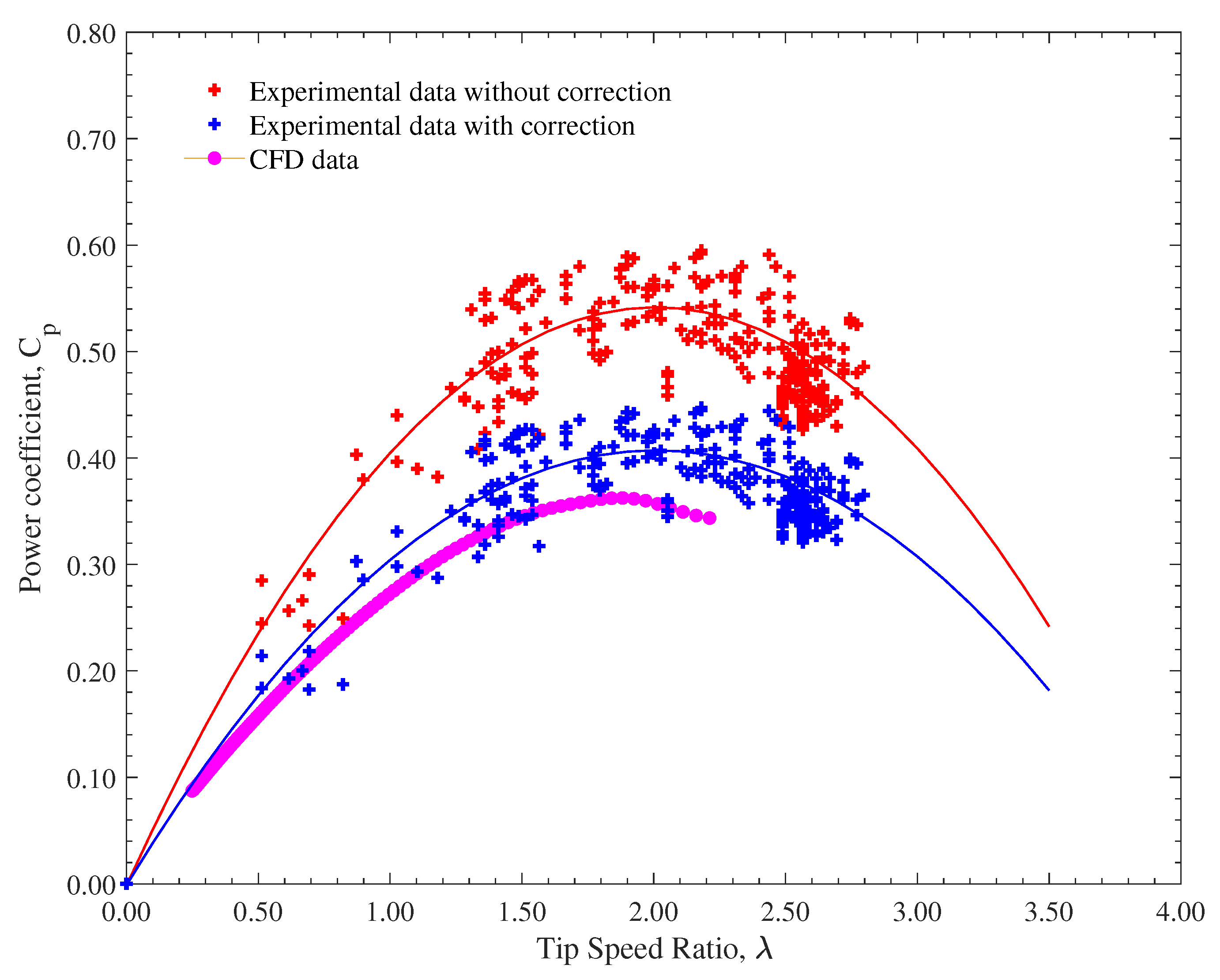
Figure 14 presents the results obtained from these experiments. The presented Figure shows the relationship between
and
of the Archimedean spiral turbine.
The red crosses represent raw data obtained directly from the experimental tests (experimental data without correction). The scatter in these points is typical of experimental data due to factors such as measurement noise. The red line represents a second-order polynomial fit to the experimental data. This fit allows for visualization of the overall trend in the data and facilitates the identification of the point of maximum efficiency. The pink data points depict the computational fluid dynamics results corresponding to the optimal treatment.
The characteristic curve of the Archimedean spiral turbine exhibits a typical behavior for hydrokinetic turbines. As rises, initially grows, achieves a peak value, and subsequently declines. The maximum achieved in the experiments was 0.541, which is higher than the value of 0.337 obtained from the optimal treatment. The experimental corresponding to the maximum is 2.12.
The blocking factor (
) in hydrokinetic turbine experiments refers to the ratio of the turbine’s projected area to the wetted cross-sectional area of the flow channel [
28,
75,
76]. This factor quantifies the obstruction caused by the turbine to the fluid flow, which can significantly influence the turbine’s performance and the accuracy of experimental measurements [
77,
78]. A higher blocking factor generally leads to increased turbulence and flow distortions, affecting the turbine’s efficiency and power output. To account for the effects of the blocking factor, various correction methods have been proposed [
76,
78,
79,
80]. One commonly used approach is the Pope and Harper correction. This method involves adjusting the measured velocity data to compensate for the blockage effects [
28,
79]. The correction factor is calculated based on the blockage ratio, which is the ratio of the turbine’s projected area to the free-stream flow area. By applying this correction factor, it is possible to obtain more accurate estimates of the turbine’s performance in an unobstructed flow.
The Pope and Harper method employs a correction factor,
, to account for the blockage effect on velocity measurements. This factor is determined by the equation
, where
is the ratio of the blocked area to the total flow area [
76,
78]. In this specific case, the turbine has an area of 0.047 m
2, and the wetted area of the channel is 0.118 m
2, corresponding a blocking factor of 0.398. This means that the turbine blocks approximately 40% of the flow.
Given a
value of 0.398, the blockage factor is determined to be 1.099. By applying the Pope and Harper correction, the original measured velocity of 0.5 m/s is multiplied by the correction factor
, yielding an adjusted velocity of 0.5498 m/s. This velocity adjustment leads to an increase in the available power in the flow from 2.96 W to 3.93 W. However, it is important to note that this apparent increase in power is likely due to the overestimation of the actual flow velocity caused by the blockage effect. Consequently, the turbine efficiency is underestimated when using the uncorrected velocity data.
Figure 14 shows the experimental data, corrected using the Pope and Harper method, represented by blue crosses. The blue line represents the polynomial fit to the corrected data.
The maximum experimental achieved was 0.407, which is approximately 14% higher than the numerical value of 0.347 obtained from the regression model. While this discrepancy may be attributed in part to inherent limitations in the regression model, which has an of 0.9574, other factors also contribute to the observed difference between experimental and numerical results. For instance, the CFD simulations were conducted at a constant inlet velocity of 1.2 m/s, whereas the experimental tests were performed at a lower flow speed of 0.5 m/s due to constraints in the test channel. This difference in flow velocity can significantly affect the Reynolds number and, consequently, the flow behavior around the blades, influencing turbine performance.
Moreover, the CFD model assumes idealized boundary conditions—such as uniform inlet flow and the absence of disturbances—which differ from real experimental conditions where flow may be slightly non-uniform and affected by minor turbulence, wall effects, or setup vibrations. On the experimental side, measurement uncertainty, sensor precision, and mechanical losses (e.g., friction in the shaft or support structure) may also influence the recorded . Despite these factors, the discrepancy between the two values is substantially smaller than the overestimated of 0.541 obtained when the Pope and Harper correction is not applied, reinforcing the validity of the chosen correction method and optimization strategy. The experimental corresponding to the maximum is 2.12, representing the turbine’s optimal operating point for converting fluid kinetic energy into mechanical work.
Although the present study identified an optimal configuration based on numerical simulations and validated it experimentally under controlled laboratory conditions, the performance of the ASHT may differ when deployed in natural rivers or tidal streams. For example, highly turbulent or unsteady flows may affect the flow attachment along the blades and, consequently, the power coefficient (). Similarly, lower or fluctuating flow velocities may reduce energy capture efficiency.
To address these limitations and enhance generalizability, future work should focus on testing the optimized ASHT in various natural water bodies. Field experiments across different hydrodynamic conditions will be essential to evaluate long-term reliability and performance. Moreover, incorporating site-specific parameters into future optimization frameworks, such as local velocity profiles, turbulence spectra, and environmental constraints, can help tailor turbine designs to particular deployment sites.
4. Conclusions
This study successfully employed a numerical optimization technique to enhance the performance of an Archimedes spiral hydrokinetic turbine (ASHT). By systematically varying key design parameters (blade length L, blade inclinationangle , and external diameter ) using a central composite design (CCD) approach, the optimal configuration for maximizing the power coefficient () was identified.
The numerical simulations demonstrated that the optimal design yielded a maximum of 0.337 for mm, ° and mm. Subsequent experimental validation confirmed the accuracy of the numerical predictions, with a slightly higher of 0.407 achieved experimentally. This discrepancy may be attributed to factors such as variations in experimental conditions or limitations in the numerical model. The optimization process revealed that the optimal design does not necessarily correspond to the maximum values of each design parameter. Instead, a balance between these parameters is crucial for achieving optimal performance.
To further refine the accuracy of numerical predictions, future research should incorporate more advanced turbulence models and consider unsteady flow effects. Additionally, a comprehensive experimental campaign with a wider range of operating conditions and flow velocities can provide valuable insights into the turbine’s performance and limitations.
Furthermore, investigating the impact of different materials on the turbine’s performance and durability, as well as optimizing the structural design to minimize weight and maximize strength, is crucial. Multi-objective optimization, considering additional performance metrics such as efficiency and structural integrity, can lead to more balanced designs. Ultimately, deploying the optimized ASHT in real-world river environments will be essential to assess its long-term performance and reliability. By addressing these areas, future research can further advance the development and deployment of ASHTs as a sustainable and efficient source of renewable energy.
Finally, evaluating the scalability of the optimized design is essential to facilitate its transition from laboratory-scale prototypes to full-scale, real-world applications. Scaling up the ASHT must account for changes in Reynolds number, structural loading, and fabrication constraints that could influence hydrodynamic performance and mechanical integrity. Future studies should investigate the performance of geometrically scaled models under realistic flow conditions to ensure that the design principles remain effective across various sizes and deployment scenarios.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}