
Data-Driven Prediction of Stability of Rock Tunnel Heading: An Application of Machine Learning Models

 ,
,  ,
,  ,
,  ,
,  ,
, 
Abstract
1. Introduction
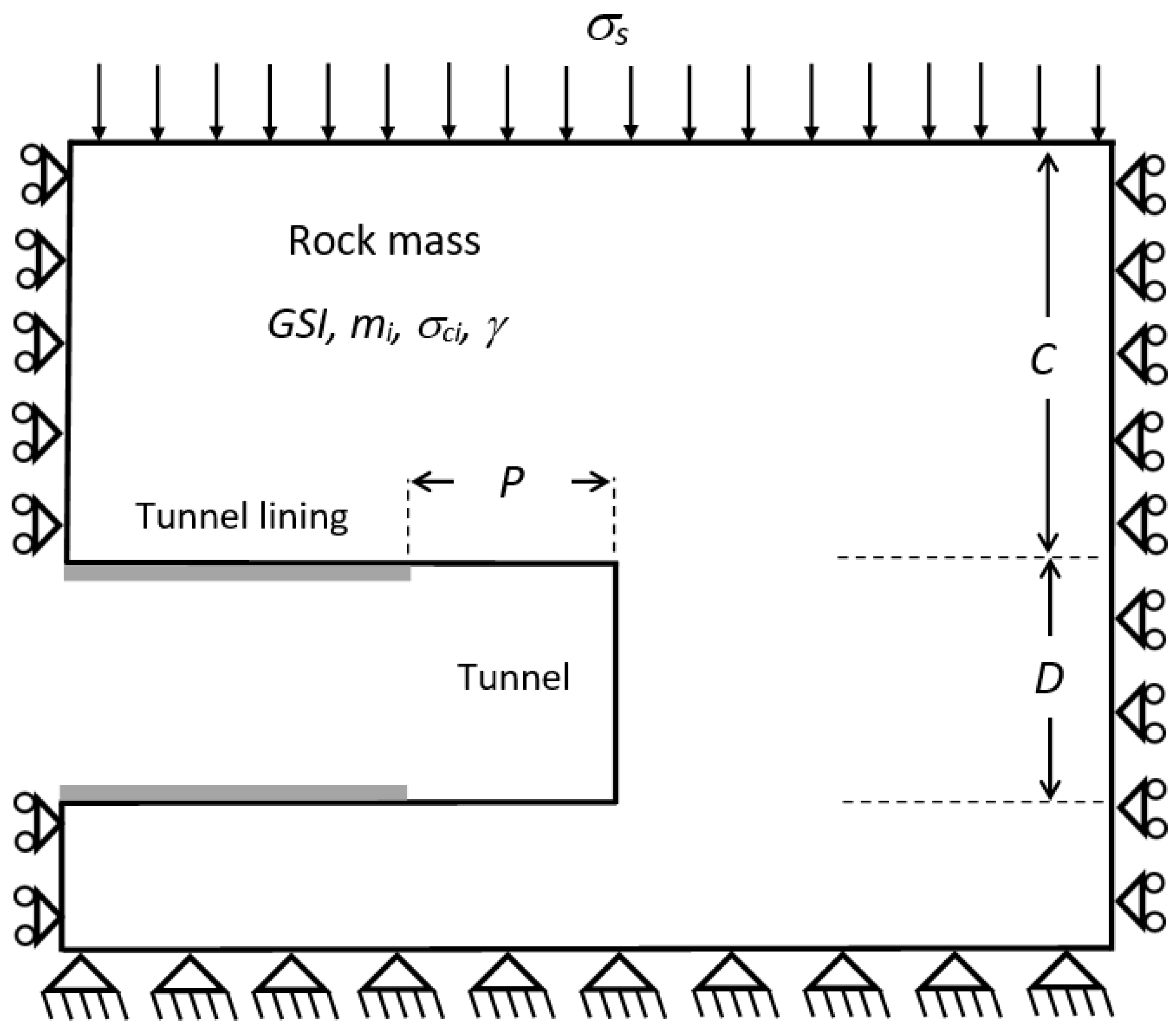
2. Problem Statement
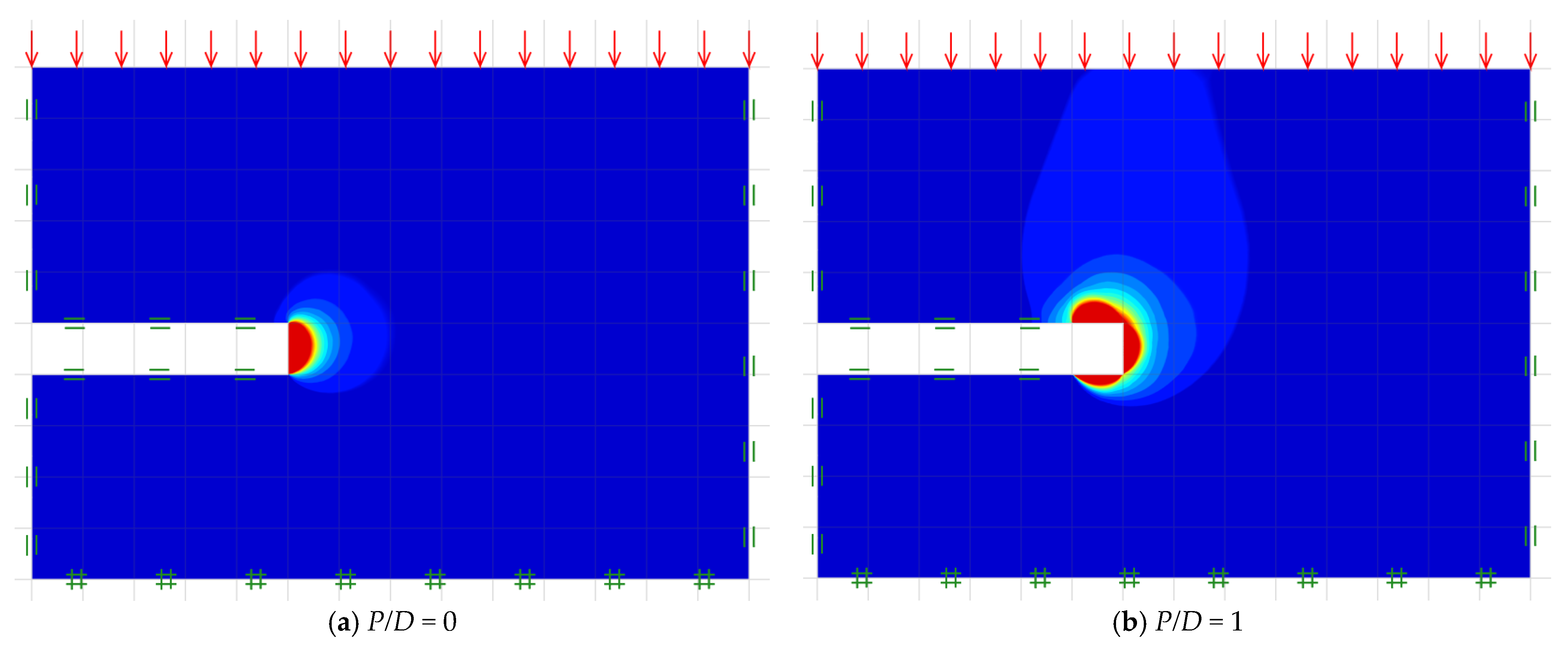
3. Finite Element Limit Analysis (FELA)
4. Machine Learning
4.1. Database
4.2. Multiple Linear Regression (MLR)
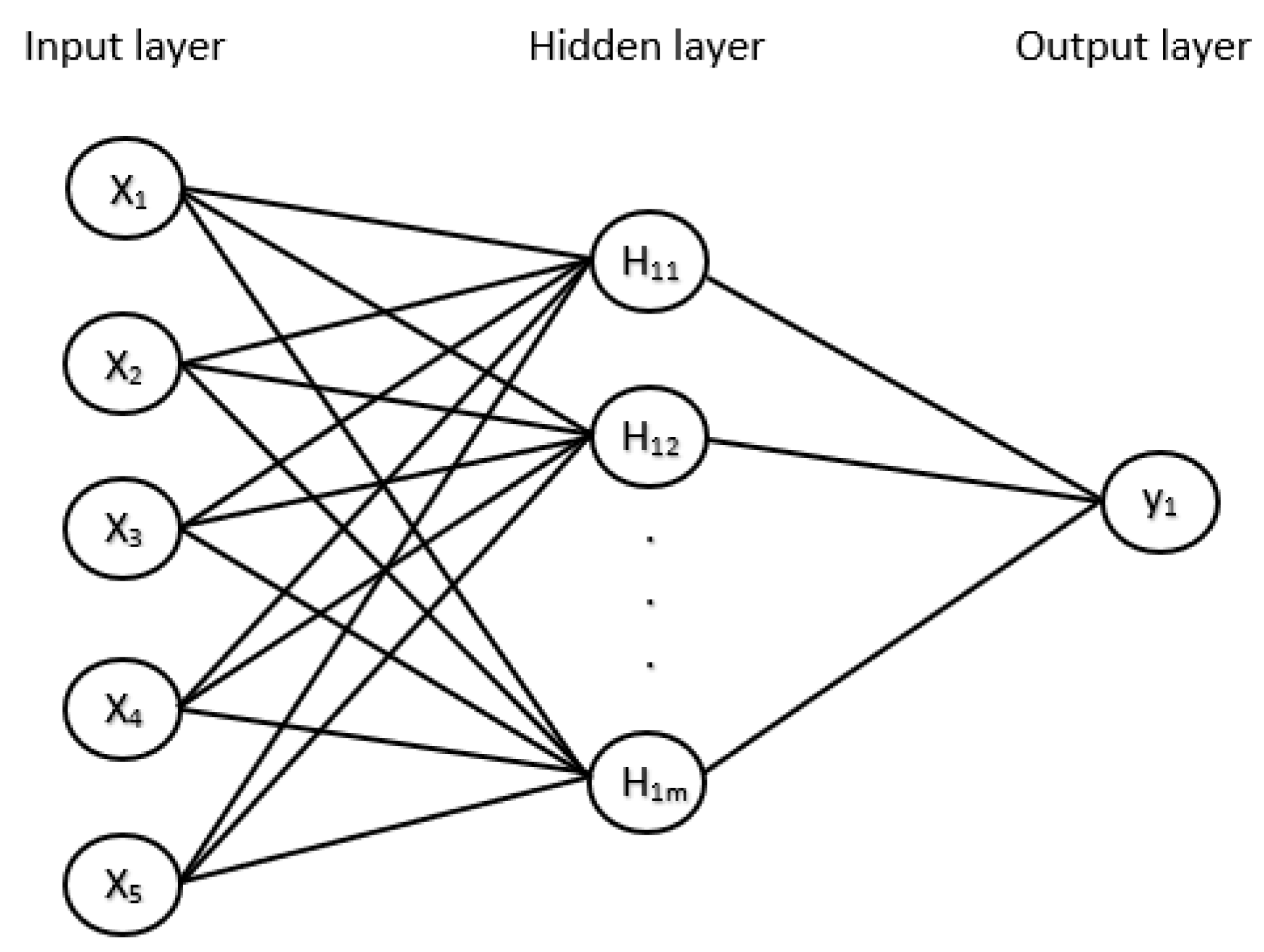
4.3. Artificial Neural Network (ANN)
4.4. 10-Fold Cross-Validation
4.5. Performance Measures
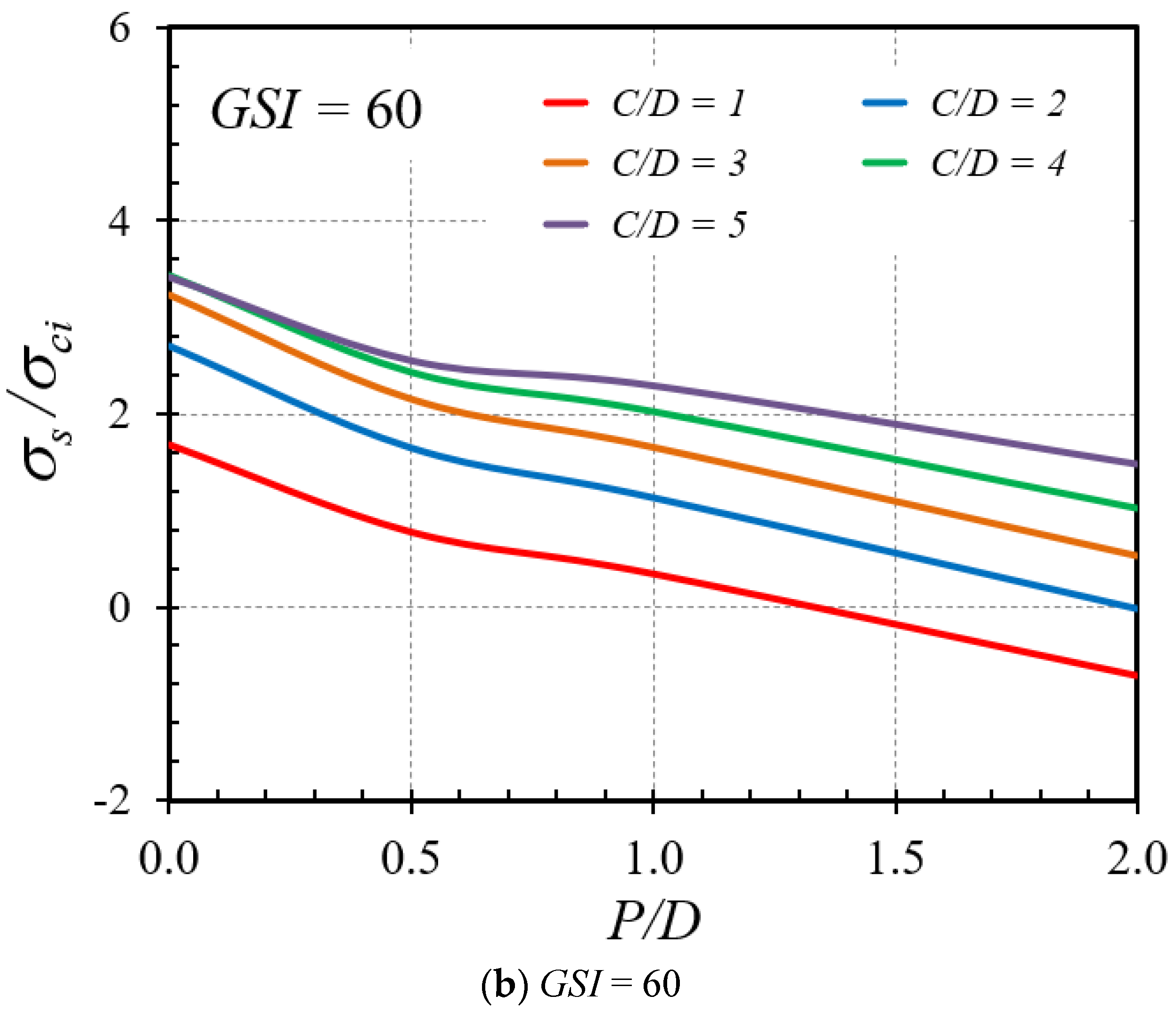
5. Results and Discussions
5.1. Multiple Linear Regression (MLR)
5.2. Artificial Neural Network
5.3. Verification
5.4. Sensitivity Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Drucker, D.C.; Prager, W.; Greenberg, H.J. Extended limit design theorems for continuous media. Q. Appl. Math. 1952, 9, 381–389. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R.L.; Liu, J.Z. The Finite Element Method, Its Basis and Fundamentals; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Sloan, S.W.; Assadi, A. Undrained stability of a plane strain heading. Can. Geotech. J. 1994, 31, 443–450. [Google Scholar] [CrossRef]
- Augarde, C.E.; Lyamin, A.V.; Sloan, S.W. Stability of an undrained plane strain heading revisited. Comput. Geotech. 2003, 30, 419–430. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, J.; Zhao, L.; Yang, J. Upper-bound finite element analysis of stability of tunnel face subjected to surcharge loading in cohesive-frictional soil. KSCE J. Civ. Eng. 2016, 20, 2270–2279. [Google Scholar] [CrossRef]
- Huang, M.; Song, C. Upper-bound stability analysis of a plane strain heading in non-homogeneous clay. Tunn. Undergr. Space Technol. 2013, 38, 213–223. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Lower bound solutions for undrained face stability of plane strain tunnel headings in anisotropic and non-homogeneous clays. Comput. Geotech. 2019, 112, 204–217. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Design equation for stability of a circular tunnel in an anisotropic and heterogeneous clay. Undergr. Space 2022, 7, 76–93. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Stability of retained soils behind underground walls with an opening using lower bound limit analysis and second-order cone programming. Geotech. Geol. Eng. 2019, 37, 1609–1625. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Design equations for undrained stability of opening in underground walls. Tunn. Undergr. Space Technol. 2017, 70, 214–220. [Google Scholar] [CrossRef]
- Hoek, E.; Brown, E.T. Empirical strength criterion for rock masses. J. Geotech. Eng. Div. 1980, 106, 1013–1035. [Google Scholar] [CrossRef]
- Hoek, E.; Carranza-Torres, C.; Corkum, B. Hoek-Brown failure criterion—2002 edition. Proc. N. Am. Rock Mech. Soc. Meet. Tor. 2022, 1, 267–273. [Google Scholar]
- Yang, X.L.; Li, L.; Yin, J.H. Stability analysis of rock slopes with a modified Hoek-Brown failure criterion. Int. J. Numer. Anal. Methods Geomech. 2004, 28, 181–190. [Google Scholar] [CrossRef]
- Li, A.J.; Merifield, R.S.; Lyamin, A.Y. Stability charts for rock slopes based on the Hoek-Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2008, 45, 689–700. [Google Scholar] [CrossRef]
- Li, A.J.; Merifield, R.S.; Lyamin, A.Y. Effect of rock mass disturbance on the stability of rock slopes using the Hoek-Brown failure criterion. Comput. Geotech. 2011, 38, 546–558. [Google Scholar] [CrossRef]
- Shen, J.Y.; Karakus, M.; Xu, C.S. Chart-based slope stability assessment using the Generalized Hoek-Brown criterion. Int. J. Rock Mech. Min. Sci. 2013, 64, 210–219. [Google Scholar] [CrossRef]
- Yodsomjai, W.; Keawsawasvong, S.; Likitlersuang, S. Stability of unsupported conical slopes in Hoek-Brown rock masses. Transp. Infrastruct. Geotechnol. 2021, 8, 278–295. [Google Scholar] [CrossRef]
- Carranza-Torres, C. Elasto-plastic solution of tunnel problems using the generalized form of the Hoek-Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2004, 41, 480–481. [Google Scholar] [CrossRef]
- Fraldi, M.; Guarracino, F. Limit analysis of collapse mechanisms in cavities and tunnels according to the Hoek-Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2009, 46, 665–673. [Google Scholar] [CrossRef]
- Huang, F.; Yang, X.L. Upper bound limit analysis of collapse shape for circular tunnel subjected to pore pressure based on the Hoek-Brown failure criterion. Tunn. Undergr. Space Technol. 2011, 26, 614–618. [Google Scholar] [CrossRef]
- Yang, X.L.; Huang, F. Collapse mechanism of shallow tunnel based on nonlinear Hoek-Brown failure criterion. Tunn. Undergr. Space Technol. 2011, 26, 686–691. [Google Scholar] [CrossRef]
- Yang, X.L.; Huang, F. Three-dimensional failure mechanism of a rectangular cavity in a Hoek-Brown rock medium. Int. J. Rock Mech. Min. Sci. 2013, 61, 189–195. [Google Scholar] [CrossRef]
- Senent, S.; Mollon, G.; Jimenez, R. Tunnel face stability in heavily fractured rock masses that follow the Hoek-Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2013, 60, 440–451. [Google Scholar] [CrossRef]
- Yang, X.L.; Yin, J.H. Upper bound solution for ultimate bearing capacity with modified Hoek-Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2005, 42, 550–560. [Google Scholar] [CrossRef]
- Merifield, R.S.; Lyamin, A.V.; Sloan, W. Limit analysis solutions for the bearing capacity of rock masses using the generalized Hoek-Brown yield criterion. Int. J. Rock Mech. Min. Sci. 2006, 43, 920–937. [Google Scholar] [CrossRef]
- Saada, Z.; Maghous, S.; Garnier, D. Bearing capacity of shallow foundations on rocks obeying a modified Hoek-Brown failure criterion. Comput. Geotech. 2008, 35, 144–154. [Google Scholar] [CrossRef]
- Clausen, J. Bearing capacity of circular footings on a Hoek-Brown material. Int. J. Rock Mech. Min. Sci. 2013, 57, 34–41. [Google Scholar] [CrossRef]
- Chakraborty, M.; Kumar, J. Bearing capacity of circular footings over rock mass by using axisymmetric quasi lower bound finite element limit analysis. Comput. Geotech. 2015, 70, 138–149. [Google Scholar] [CrossRef]
- Keshavarz, A.; Kumar, J. Bearing capacity of foundations on rock mass using the method of characteristics. Int. J. Numer. Anal. Methods Geomech. 2017, 42, 542–557. [Google Scholar] [CrossRef]
- Kumar, J.; Mohapatra, D. Lower-bound finite elements limit analysis for Hoek-Brown materials using semidefinite programming. J. Eng. Mech. 2017, 143, 04017077. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Three-dimensional lower bound finite element limit analysis of Hoek-Brown material using semidefinite programming. Comput. Geotech. 2018, 104, 248–270. [Google Scholar] [CrossRef]
- Keawsawasvong, S. Bearing capacity of conical footings on Hoek-Brown rock masses using finite element limit analysis. Int. J. Comput. Mater. Sci. Eng. 2021, 10, 2150015. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Thongchom, C.; Likitlersuang, S. Bearing capacity of strip footing on Hoek-Brown rock mass subjected to eccentric and inclined loading. Transp. Infrastruct. Geotechnol. 2021, 8, 189–200. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Shiau, J.; Limpanawannakul, K.; Panomchaivath, S. Stability charts for closely spaced strip footings on Hoek-Brown rock mass. Geotech. Geol. Eng. 2022, 40, 3051–3066. [Google Scholar] [CrossRef]
- Wu, G.; Zhao, M.; Zhang, R.; Lei, M. Ultimate Bearing Capacity of Strip Footings on Hoek-Brown Rock Slopes Using Adaptive Finite Element Limit Analysis. Rock Mech. Rock Eng. 2021, 54, 1621–1628. [Google Scholar] [CrossRef]
- Yodsomjai, W.; Keawsawasvong, S.; Lai, V.Q. Limit analysis solutions for bearing capacity of ring foundations on rocks using Hoek-Brown failure criterion. Int. J. Geosynth. Ground Eng. 2021, 7, 29. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Stability of unlined square tunnels in Hoek-Brown rock masses based on lower bound analysis. Comput. Geotech. 2019, 105, 249–264. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Design equation for stability of shallow unlined circular tunnels in Hoek-Brown rock masses. Bull. Eng. Geol. Environ. 2020, 79, 4167–4190. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, R.; Zhao, M.; Jiang, J. Stability of unlined rectangular tunnels in rock masses subjected to surcharge loading. Int. J. Geomech. 2021, 21, 04020233. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhao, M.; Zhang, R.; Zhao, H.; Wu, G. Stability of dual square tunnels in rock masses subjected to surcharge loading. Tunn. Undergr. Space Technol. 2019, 92, 103037. [Google Scholar] [CrossRef]
- Zhang, R.; Xiao, Y.; Zhao, M.; Zhao, H. Stability of dual circular tunnels in a rock mass subjected to surcharge loading. Comput. Geotech. 2019, 108, 257–268. [Google Scholar] [CrossRef]
- Rahaman, O.; Kumar, J. Stability analysis of twin horse-shoe shaped tunnels in rock mass. Tunn. Undergr. Space Technol. 2020, 98, 103354. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Lower bound stability analysis of plane strain headings in Hoek-Brown rock masses. Tunn. Undergr. Space Technol. 2019, 84, 99–112. [Google Scholar] [CrossRef]
- Sloan, S.W. Geotechnical stability analysis. Géotechnique 2013, 63, 531–572. [Google Scholar] [CrossRef]
- Shiau, J.; Al-Asadi, F. Three-dimensional analysis of circular tunnel headings using Broms and Bennermarks’ Original Stability Number. Int. J. Geomech. 2020, 20, 06020015. [Google Scholar] [CrossRef]
- Ziaee, S.A.; Sadrossadat, E.; Alavi, A.H.; Shadmehri, D.M. Explicit formulation of bearing capacity of shallow foundations on rock masses using artificial neural networks: Application and supplementary studies. Environ. Earth Sci. 2015, 73, 3417–3431. [Google Scholar] [CrossRef]
- Alavi, A.H.; Sadrossadat, E. New design equations for estimation of ultimate bearing capacity of shallow foundations resting on rock masses. Geosci. Front. 2016, 7, 91–99. [Google Scholar] [CrossRef]
- Millán, M.A.; Galindo, R.; Alencar, A. Application of Artificial Neural Networks for Predicting the Bearing Capacity of Shallow Foundations on Rock Masses. Rock Mech. Rock Eng. 2021, 54, 5071–5094. [Google Scholar] [CrossRef]
- Lai, V.Q.; Sangjinda, K.; Keawsawasvong, S.; Eskandarinejad, A.; Chauhan, V.B.; Sae-Long, W.; Limkatanyu, S. A machine learning regression approach for predicting the bearing capacity of a strip footing on rock mass under inclined and eccentric load. Front. Built Environ. 2022, 8, 962331. [Google Scholar] [CrossRef]
- Li, A.J.; Khoo, S.; Lyamin, A.V.; Wang, Y. Rock slope stability analyses using extreme learning neural network and terminal steepest descent algorithm. Autom. Construct. 2016, 65, 42–50. [Google Scholar] [CrossRef]
- Naghadehi, M.Z.; Thewes, M.; Lavasan, A.A. Face stability analysis of mechanized shiel tunnelling: An objective systems approach to the problem. Eng. Geol. 2019, 262, 105307. [Google Scholar] [CrossRef]
- Ghorbani, A.; Hasanzadehshooiili, H.; Sadowski, L. Neural prediction of tunnels’ support pressure in elasto-plastic, strain-softening rock mass. Appl. Sci. 2018, 8, 841. [Google Scholar] [CrossRef]
- Lee, J.H.; Akutagawa, S.; Moon, H.D.; Han, H.S.; Yoo, J.H.; Kim, K.Y. Application of Artificial Neural Network method for deformation analysis of shallow NATM tunnel due to excavation. In Proceedings of the Korean Society for Rock Mechanics Conference; Korean Society for Rock Mechanics and Rock Engineering: Seoul, Korea, 2008; Volume 10a, pp. 43–51. [Google Scholar]
- Mahdevari, S.; Torabi, S.R. Prediction of tunnel convergence using Artificial Neural Networks. Tunn. Undergr. Space Technol. 2012, 28, 218–228. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Seehavong, S.; Ngamkhanong, C. Application of artificial neural networks for predicting the stability of rectangular tunnel in Hoek-Brown rock masses. Front. Built Environ. 2022, 8, 837745. [Google Scholar] [CrossRef]
- Jearsiripongkul, T.; Keawsawasvong, S.; Thongchom, C.; Ngamkhanong, C. Prediction of the Stability of Various Tunnel Shapes Based on Hoek-Brown Failure Criterion Using Artificial Neural Network (ANN). Sustainability 2022, 14, 4533. [Google Scholar] [CrossRef]
- Jearsiripongkul, T.; Keawsawasvong, S.; Banyong, R.; Seehavong, S.; Sangjinda, K.; Thongchom, C.; Chavda, J.; Ngamkhanong, C. Stability evaluations of unlined horseshoe tunnels based on extreme learning neural network. Computation 2022, 10, 81. [Google Scholar] [CrossRef]
- Sirimontree, S.; Keawsawasvong, S.; Ngamkhanong, C.; Seehavong, S.; Sangjinda, K.; Jearsiripongkul, T.; Thongchom, C.; Nuaklong, P. Neural network-based prediction model for the stability of unlined elliptical tunnels in cohesive-frictional soils. Building 2022, 12, 444. [Google Scholar] [CrossRef]
- Zhang, W.; Li, H.; Li, Y.; Liu, H.; Chen, Y.; Ding, X. Application of deep learning algorithms in geotechnical engineering: A short critical review. Artif. Intell. Rev. 2021, 54, 5633–5673. [Google Scholar] [CrossRef]
- Alshboul, O.; Alzubaidi, M.A.; Mamlook, R.E.A.; Almasabha, G.; Almuflih, A.S.; Shehadeh, A. Forecasting liquidated damages via machine learning-based modified regression models for highway construction projects. Sustainability 2022, 14, 5835. [Google Scholar] [CrossRef]
- Ngamkhanong, C.; Kaewunruen, S. Prediction of Thermal-Induced Buckling Failures of Ballasted Railway Tracks Using Artificial Neural Network (ANN). Int. J. Struct. Stab. Dyn. 2022, 22, 2250049. [Google Scholar] [CrossRef]
- Morgenroth, J.; Khan, U.T.; Perras, M.A. An overview of opportunities for machine learning methods in underground rock engineering design. Geosciences 2019, 9, 504. [Google Scholar] [CrossRef]
- Lai, V.Q.; Shiau, J.; Van, C.N.; Tran, H.D.; Keawsawasvong, S. Bearing capacity of conical footing on anisotropic and heterogeneous clays using FEA and ANN. Mar. Georesources Geotechnol. 2020. [Google Scholar] [CrossRef]
- Butterfield, R. Dimensional analysis for geotechnical engineering. Géotechnique 1999, 49, 357–366. [Google Scholar] [CrossRef]
- OptumG2. OptumCE Optum Computational Engineering, Copenhagen, Denmark. 2020. Available online: https://optumce.com/ (accessed on 1 January 2022).
- Ukritchon, B.; Keawsawasvong, S. Error in Ito and Matsui’s limit equilibrium solution of lateral force on a row of stabilizing piles. J. Geotech. Geoenviron. Eng. ASCE 2017, 143, 02817004. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Undrained basal stability of braced circular excavations in non-homogeneous clays with linear increase of strength with depth. Comput. Geotech. 2019, 115, 103180. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Undrained stability of a spherical cavity in cohesive soils using finite element limit analysis. J. Rock Mech. Geotech. Eng. 2019, 11, 1274–1285. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Undrained stability of plane strain active trapdoors in anisotropic and non-homogeneous clays. Tunn. Undergr. Space Technol. 2021, 107, 103628. [Google Scholar] [CrossRef]
- Ukritchon, B.; Yoang, S.; Keawsawasvong, S. Three-dimensional stability analysis of the collapse pressure on flexible pavements over rectangular trapdoors. Transp. Geotech. 2019, 21, 100277. [Google Scholar] [CrossRef]
- Ukritchon, B.; Yoang, S.; Keawsawasvong, S. Undrained stability of unsupported rectangular excavations in non-homogeneous clays. Comput. Geotech. 2020, 117, 103281. [Google Scholar] [CrossRef]
- Yodsomjai, W.; Keawsawasvong, S.; Senjuntichai, T. Undrained stability of unsupported conical slopes in anisotropic clays based on Anisotropic Undrained Shear failure criterion. Transp. Infrastruct. Geotechnol. 2021, 8, 557–568. [Google Scholar] [CrossRef]
- Yodsomjai, W.; Keawsawasvong, S.; Thongchom, C.; Lawongkerd, J. Undrained stability of unsupported conical slopes in two-layered clays. Innov. Infrastruct. Solut. 2021, 6, 15. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Yoonirundorn, K.; Senjuntichai, T. Pullout capacity factor for cylindrical suction caissons in anisotropic clays based on Anisotropic Undrained Shear failure criterion. Transp. Infrastruct. Geotechnol. 2021, 8, 629–644. [Google Scholar] [CrossRef]
- Shiau, J.; Chudal, B.; Mahalingasivam, K.; Keawsawasvong, S. Pipeline burst-related ground stability in blowout condition. Transp. Geotech. 2021, 29, 100587. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Lai, V.Q. End bearing capacity factor for annular foundations embedded in clay considering the effect of the adhesion factor. Int. J. Geosynth. Ground Eng. 2021, 7, 15. [Google Scholar] [CrossRef]
- Ciria, H.; Peraire, J.; Bonet, J. Mesh adaptive computation of upper and lower bounds in limit analysis. Int. J. Numer. Methods Eng. 2008, 75, 899–944. [Google Scholar] [CrossRef]
- Gomes, Y.F.; Verri, F.A.N.; Ribeiro, D.B. Use of machine learning techniques for predicting the bearing capacity of piles. Soils Rock 2021, 44, 1–14. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameters | Values | Average |
|---|---|---|
| C/D | 1/2/3/4/5 | 3 |
| P/D | 0/0.5/1/2 | 0.875 |
| GSI | 40/60/80/100 | 70 |
| mi | 5/10/20/30 | 16.25 |
| γD/σci | 0/0.001/0.01 | 0.0037 |
| Output Parameter | Values | Average |
|---|---|---|
| σs/σci | 0.0415-98.9825 | 10.2643 |
| Methodology | R2 | Mean Absolute Error (MAE) | Root Mean Squared Error (RMSE) |
|---|---|---|---|
| Multiple Linear Regression (MLR) | 0.6313 | 5.7526 | 8.5310 |
| Artificial Neural Network (ANN) | 0.9982 | 0.6204 | 0.7740 |
| Hidden Layer Neurons (i) | Hidden Layer Bias (b1) | Hidden Weight (IW1) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C/D (j = 1) | P/D (j = 2) | GSI (j = 3) | mi (j = 4) | γD/σci (j = 5) | ||||||
| 1 | −5.0733 | −1.6658 | −0.6023 | 1.3245 | 0.7760 | 0.0138 | ||||
| 2 | −1.8481 | −0.0550 | 0.1802 | 0.0961 | −0.0057 | 0.2143 | ||||
| 3 | −1.5341 | −0.0605 | −0.1463 | −0.5307 | −0.1405 | 0.0254 | ||||
| 4 | −1.8298 | 0.1549 | −0.1237 | 0.3186 | 0.0550 | 0.2366 | ||||
| 5 | −3.4584 | 0.5283 | −0.4715 | 1.6357 | 0.5328 | 0.0120 | ||||
| 6 | −1.9151 | −0.0534 | 0.3226 | 0.2164 | 0.0401 | 0.0842 | ||||
| 7 | −4.5532 | 0.6104 | −0.8435 | 1.2468 | −1.3417 | 0.0172 | ||||
| 8 | 5.2780 | −0.1685 | 2.2840 | −1.2978 | −0.7315 | −0.0087 | ||||
| 9 | −1.7423 | −0.0802 | 0.3572 | 0.3623 | 0.0068 | −0.0326 | ||||
| Output layer node (k) | Output layer bias (b2) | Output weight (IW2) | ||||||||
| i = 1 | i = 2 | i = 3 | i = 4 | i = 5 | i = 6 | i = 7 | i = 8 | i = 9 | ||
| 1 | −1.6224 | −0.1079 | −0.5422 | 0.2435 | 2.5051 | −0.2877 | −1.1940 | −2.8165 | −0.5377 | −1.6224 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngamkhanong, C.; Keawsawasvong, S.; Jearsiripongkul, T.; Cabangon, L.T.; Payan, M.; Sangjinda, K.; Banyong, R.; Thongchom, C. Data-Driven Prediction of Stability of Rock Tunnel Heading: An Application of Machine Learning Models. Infrastructures 2022, 7, 148. https://doi.org/10.3390/infrastructures7110148
Ngamkhanong C, Keawsawasvong S, Jearsiripongkul T, Cabangon LT, Payan M, Sangjinda K, Banyong R, Thongchom C. Data-Driven Prediction of Stability of Rock Tunnel Heading: An Application of Machine Learning Models. Infrastructures. 2022; 7(11):148. https://doi.org/10.3390/infrastructures7110148
Chicago/Turabian StyleNgamkhanong, Chayut, Suraparb Keawsawasvong, Thira Jearsiripongkul, Lowell Tan Cabangon, Meghdad Payan, Kongtawan Sangjinda, Rungkhun Banyong, and Chanachai Thongchom. 2022. "Data-Driven Prediction of Stability of Rock Tunnel Heading: An Application of Machine Learning Models" Infrastructures 7, no. 11: 148. https://doi.org/10.3390/infrastructures7110148
APA StyleNgamkhanong, C., Keawsawasvong, S., Jearsiripongkul, T., Cabangon, L. T., Payan, M., Sangjinda, K., Banyong, R., & Thongchom, C. (2022). Data-Driven Prediction of Stability of Rock Tunnel Heading: An Application of Machine Learning Models. Infrastructures, 7(11), 148. https://doi.org/10.3390/infrastructures7110148