
Quadcopter Unmanned Aerial Vehicle Structural Design Using an Integrated Approach of Topology Optimization and Additive Manufacturing

 ,
,  ,
,  ,
,  ,
, 
Abstract
1. Introduction
1.1. Scopic Overview
1.2. Related Work
1.3. Aim, Objectives, and Contribution
- Investigating quadcopter frame specifications with a focus on mechanical strength, weight, and structural integrity to improve performance and durability.
- Implementing 3D printing technology and topology optimization (TO) to develop lightweight and robust quadcopter frames that meet the demanding needs of UAV applications.
- Conducting experimental tests to accurately calculate the moment of inertia of the motor for the optimized quadcopter frame, ensuring reliable performance under operational conditions.
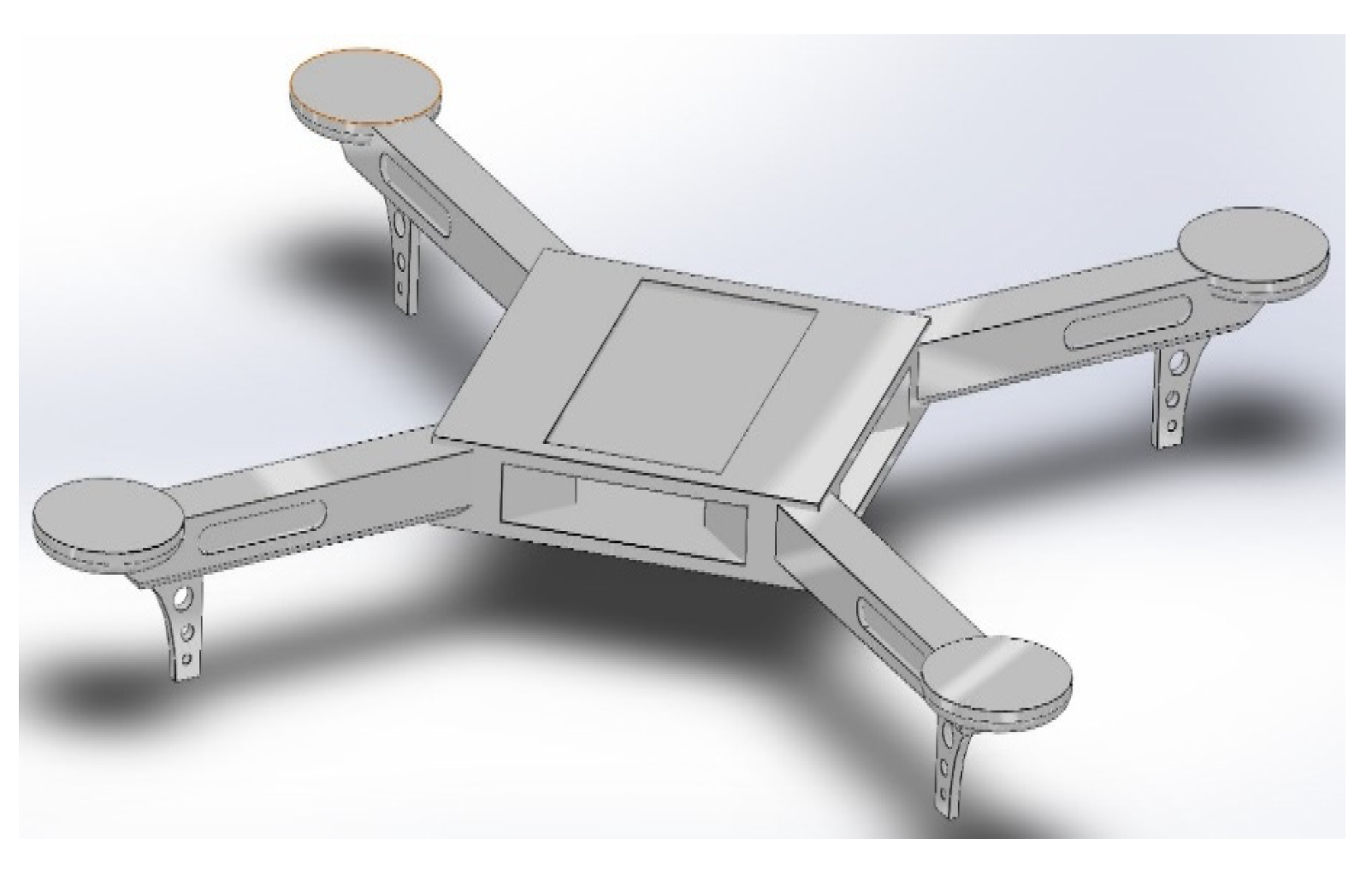
2. Frame Design and Fabrication
2.1. Frame Types
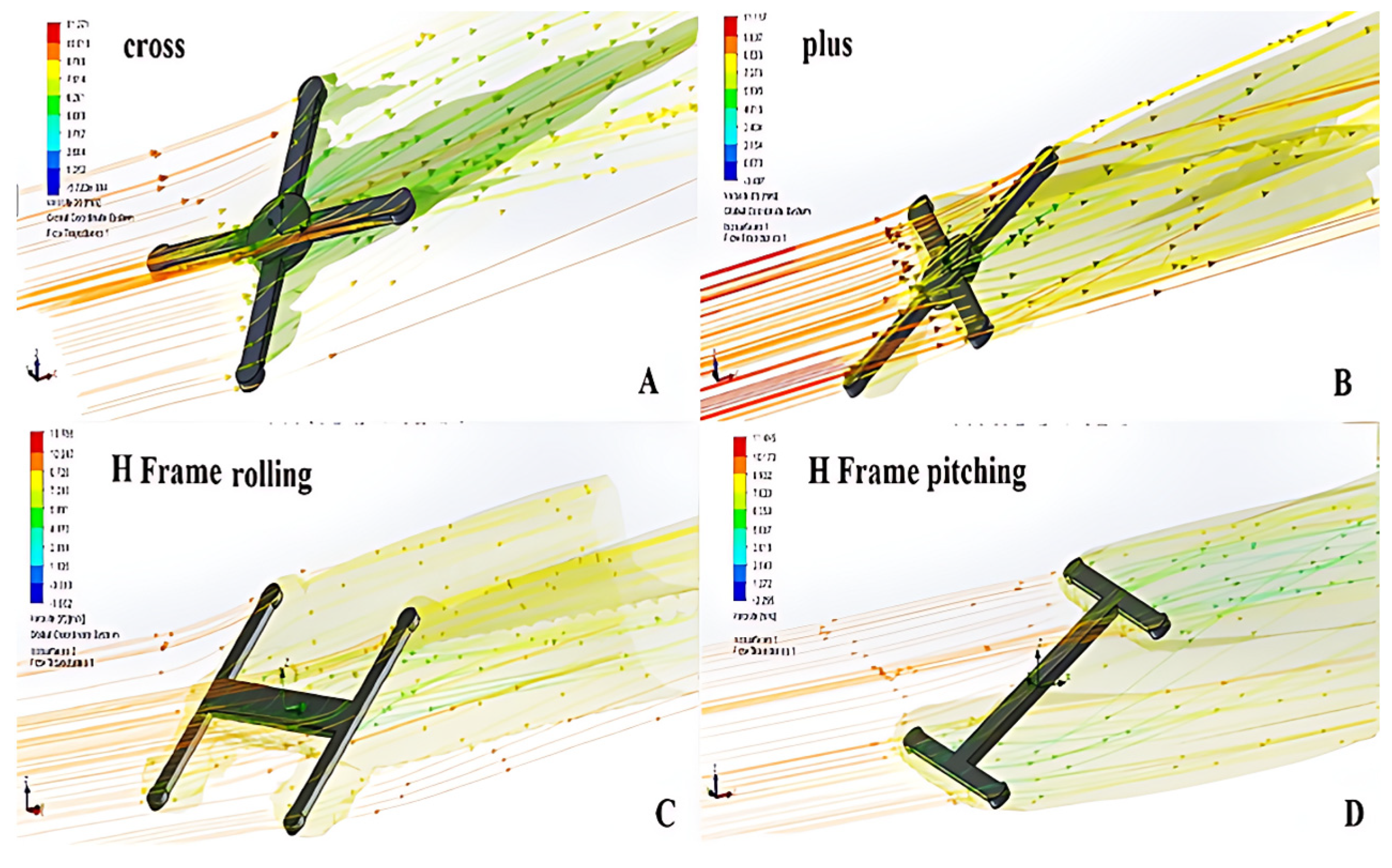
2.2. Aerodynamic Behavior Assessment
3. Experimental Approach
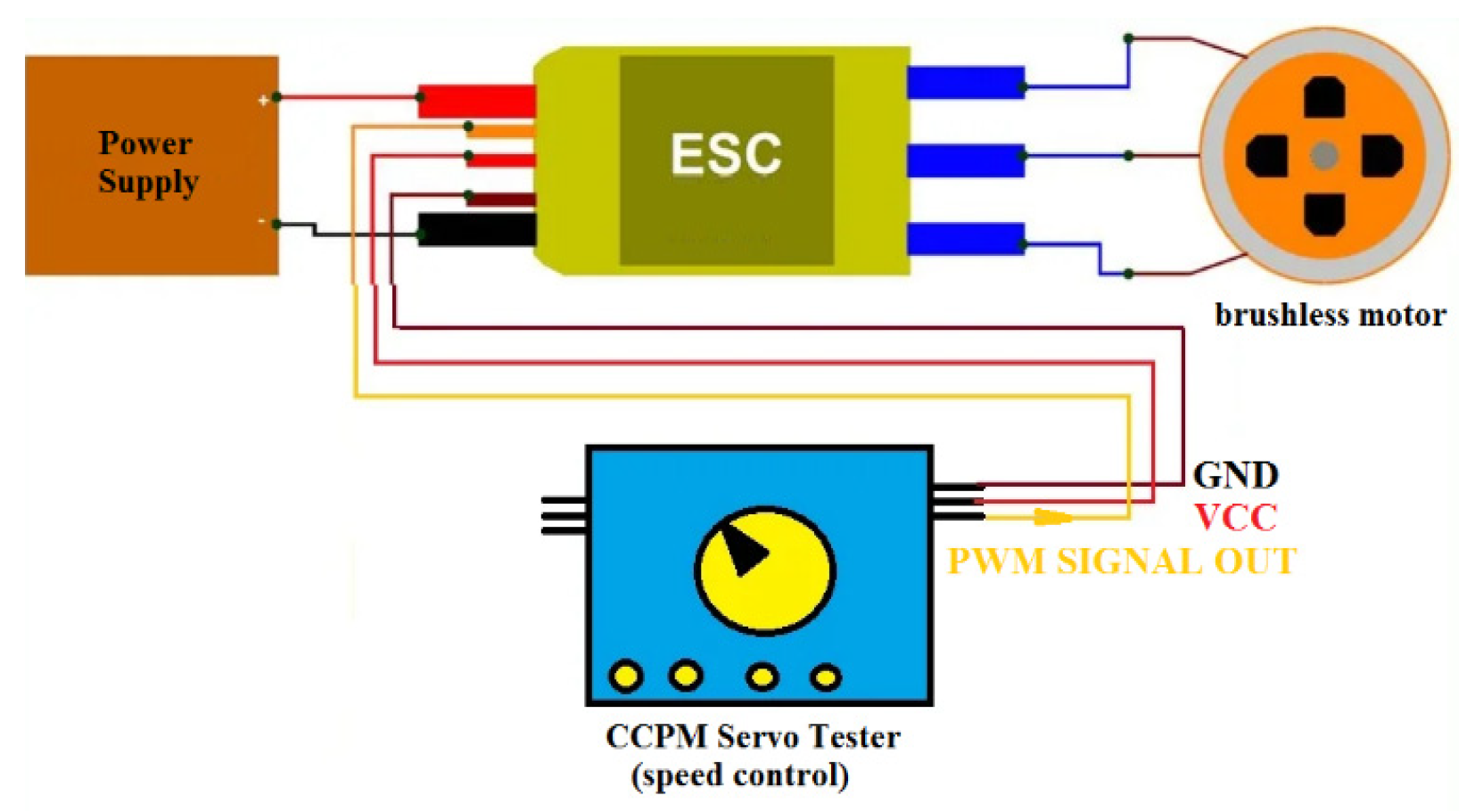
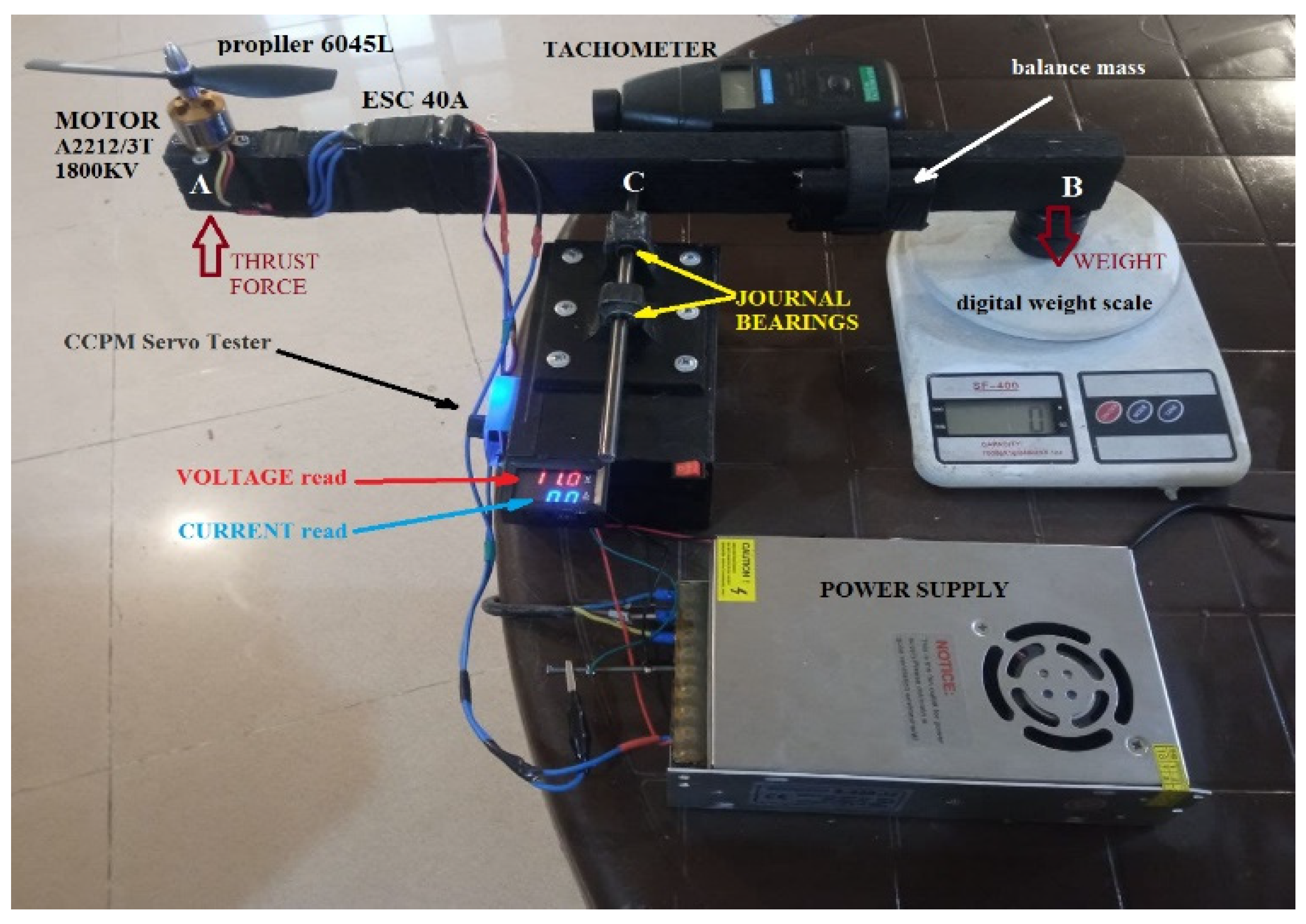
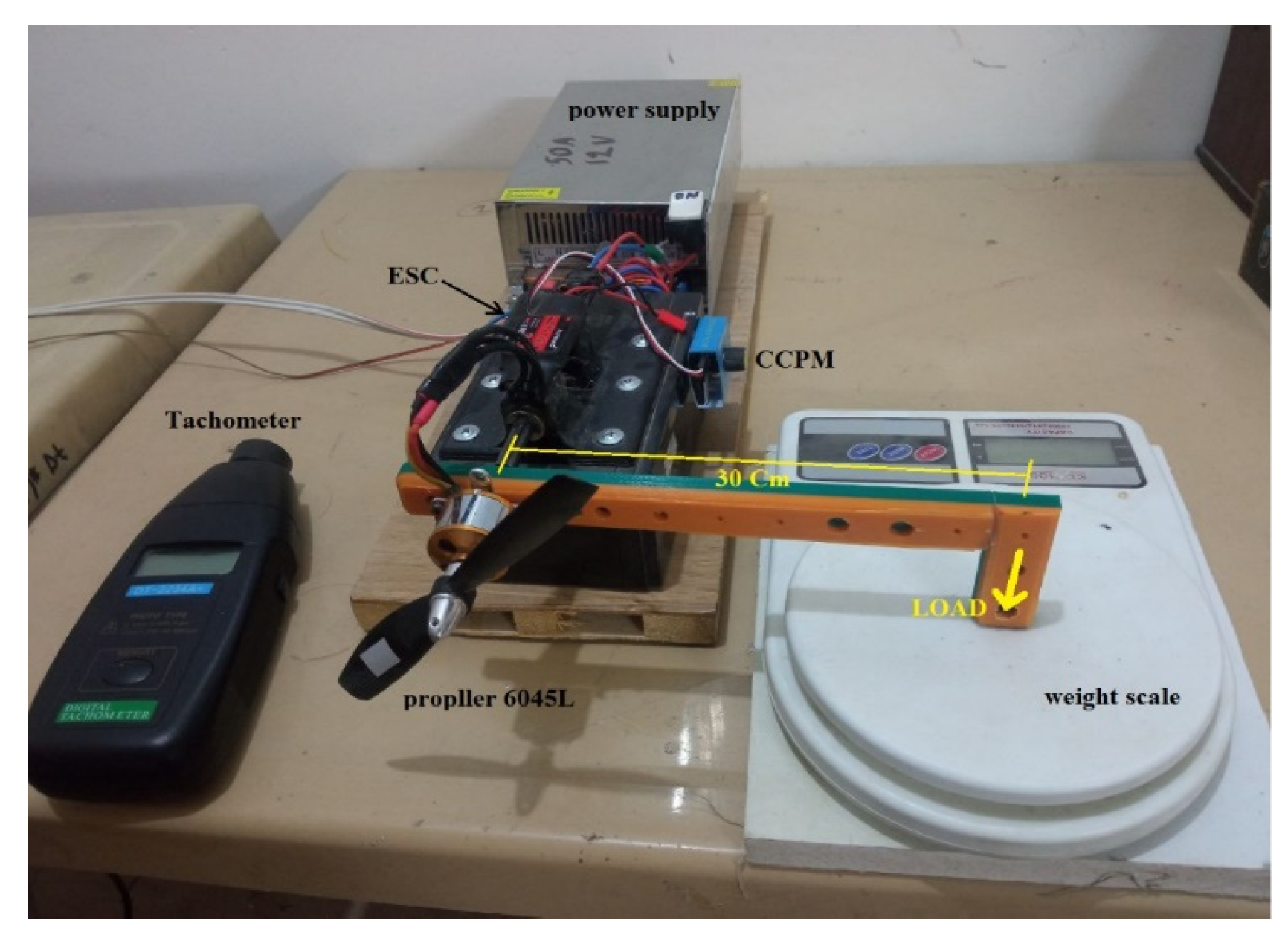
3.1. Motor and Propeller Assembly
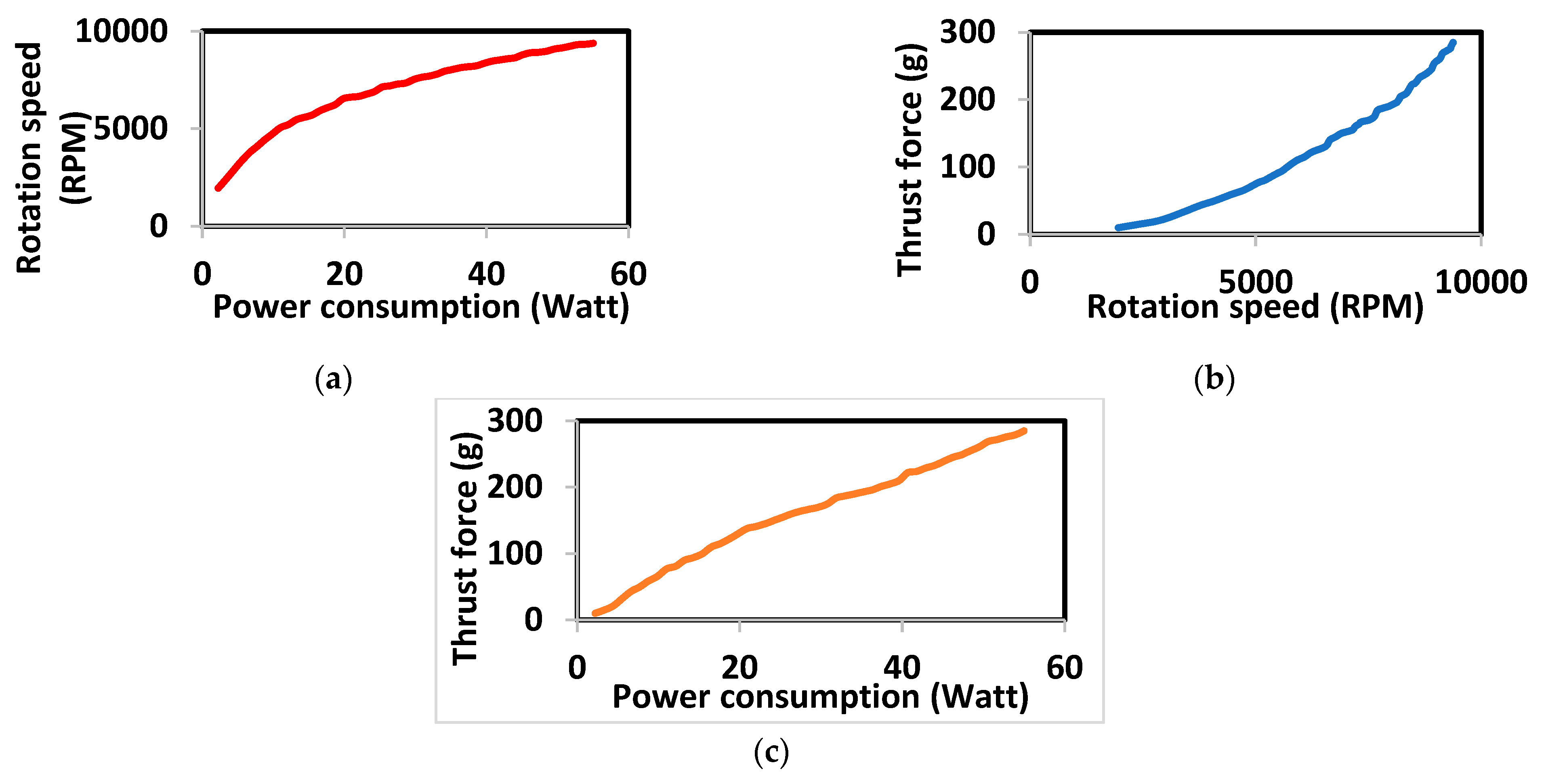
3.1.1. Thrust Calculation
3.1.2. Moment Calculation
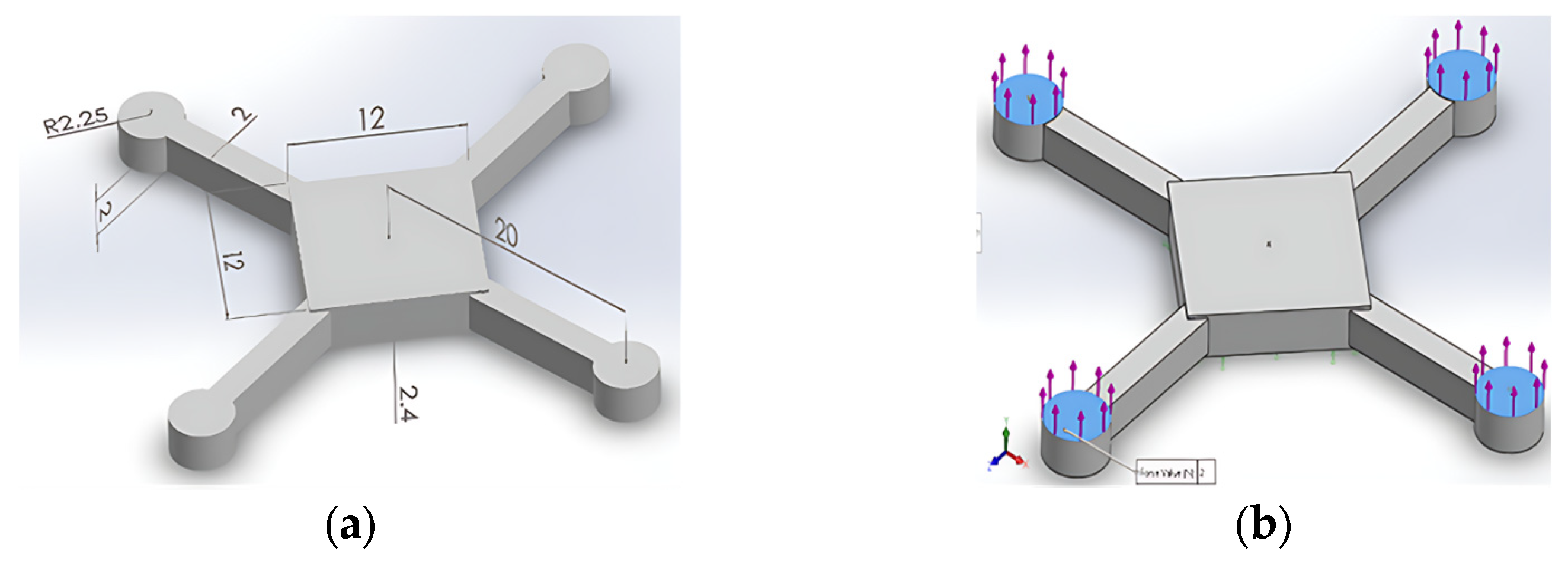
3.2. Frame Design Principles
4. Testing and Comparison Results and Discussion
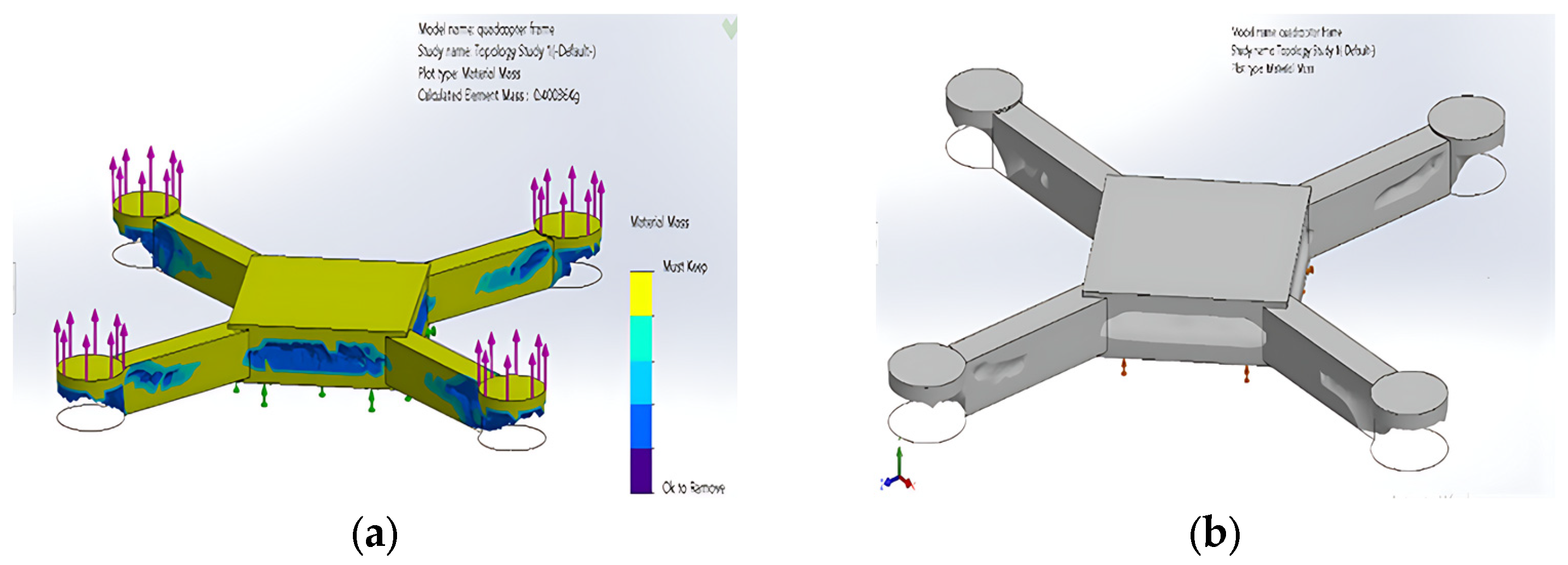
4.1. Topology Optimization
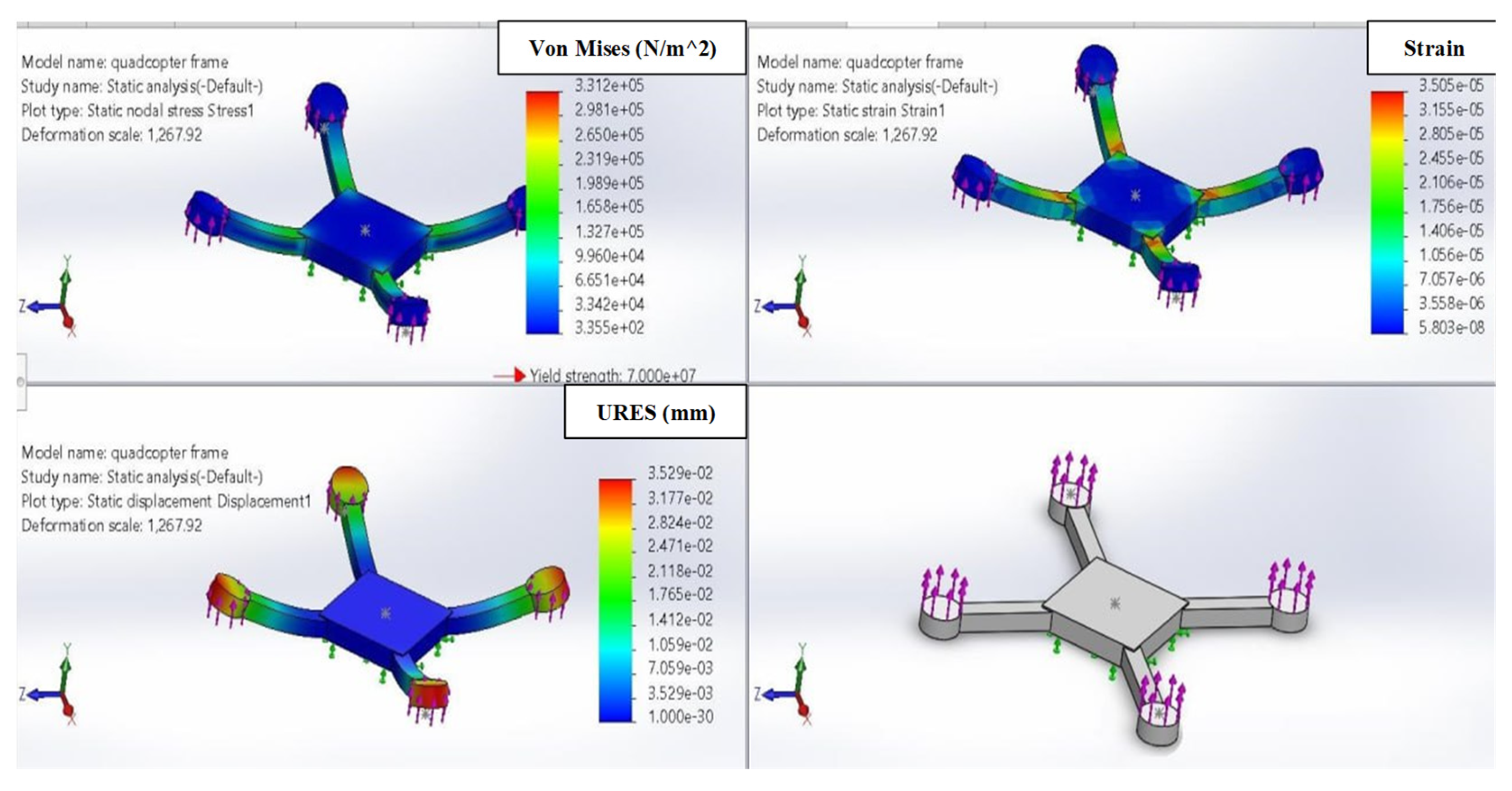
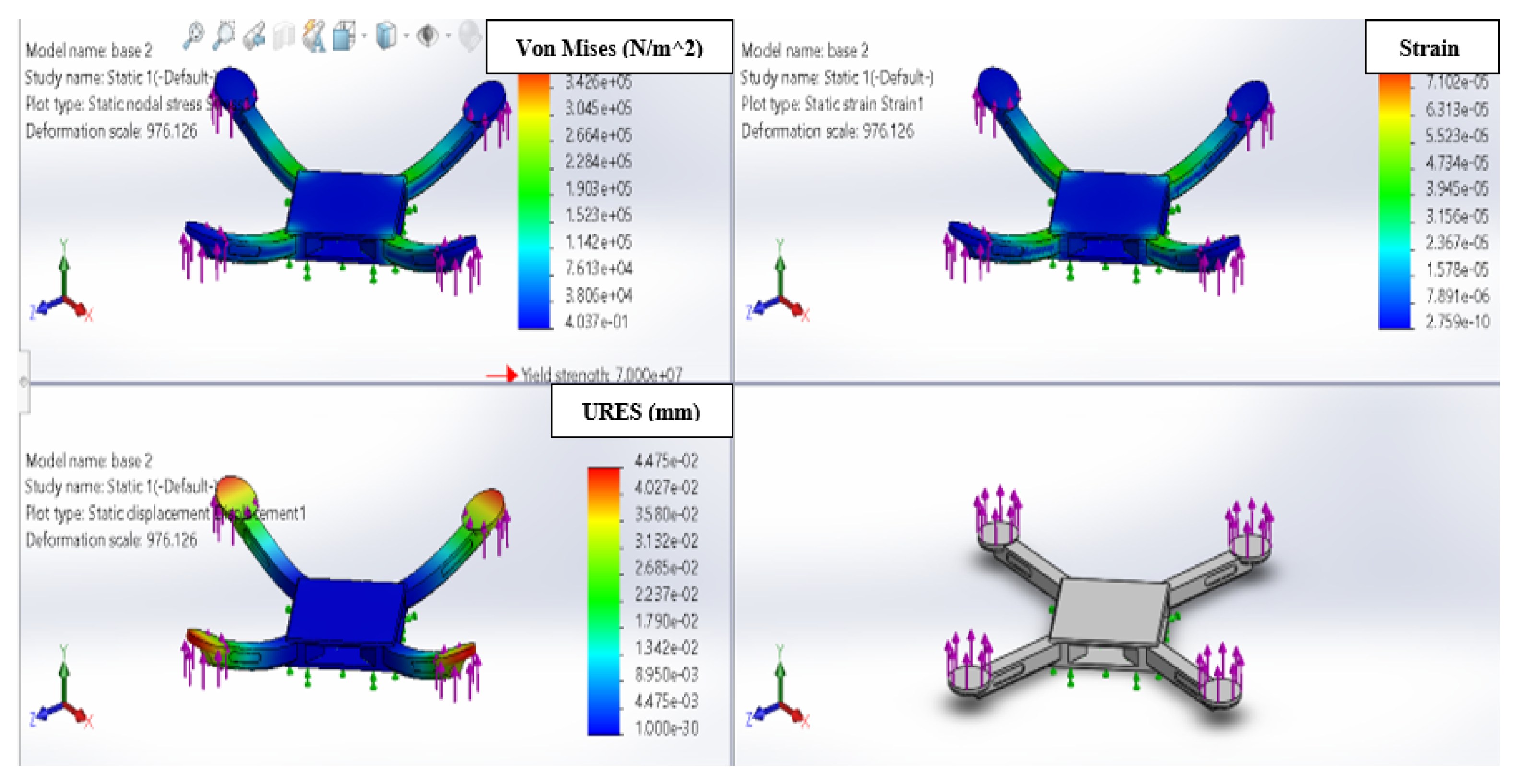
4.2. Static Structural Analysis
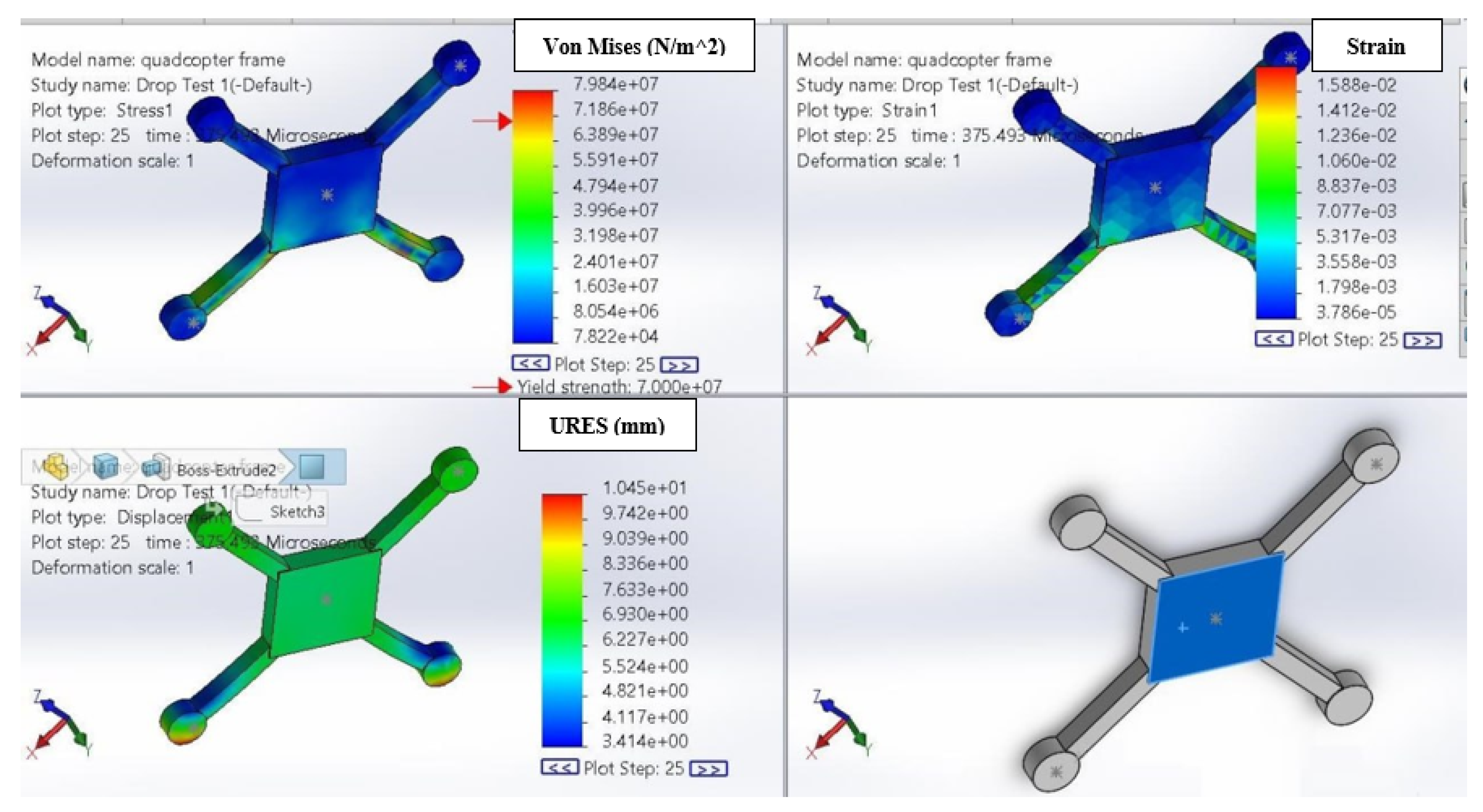
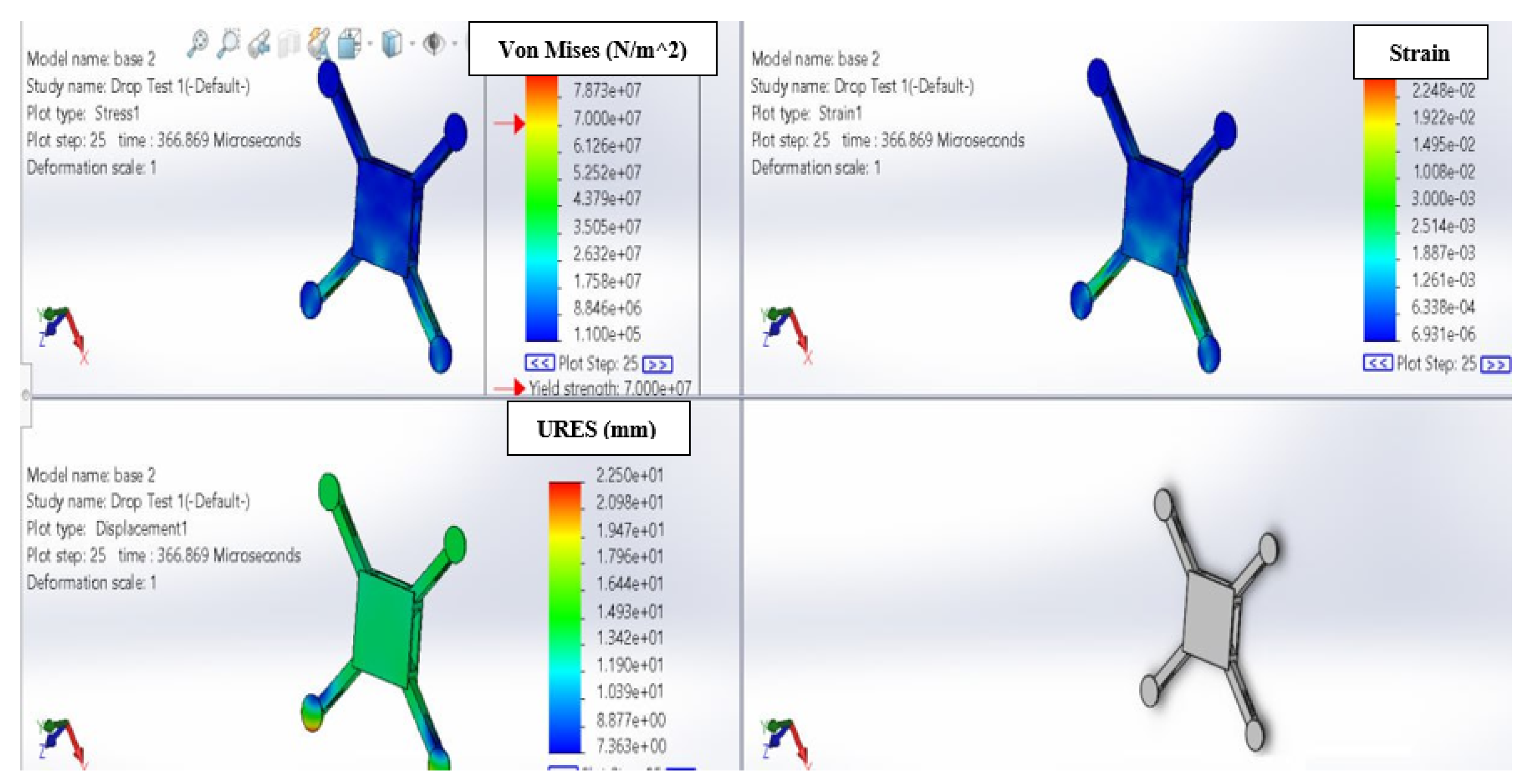
4.3. Impact Test
4.4. Comparison Aspects
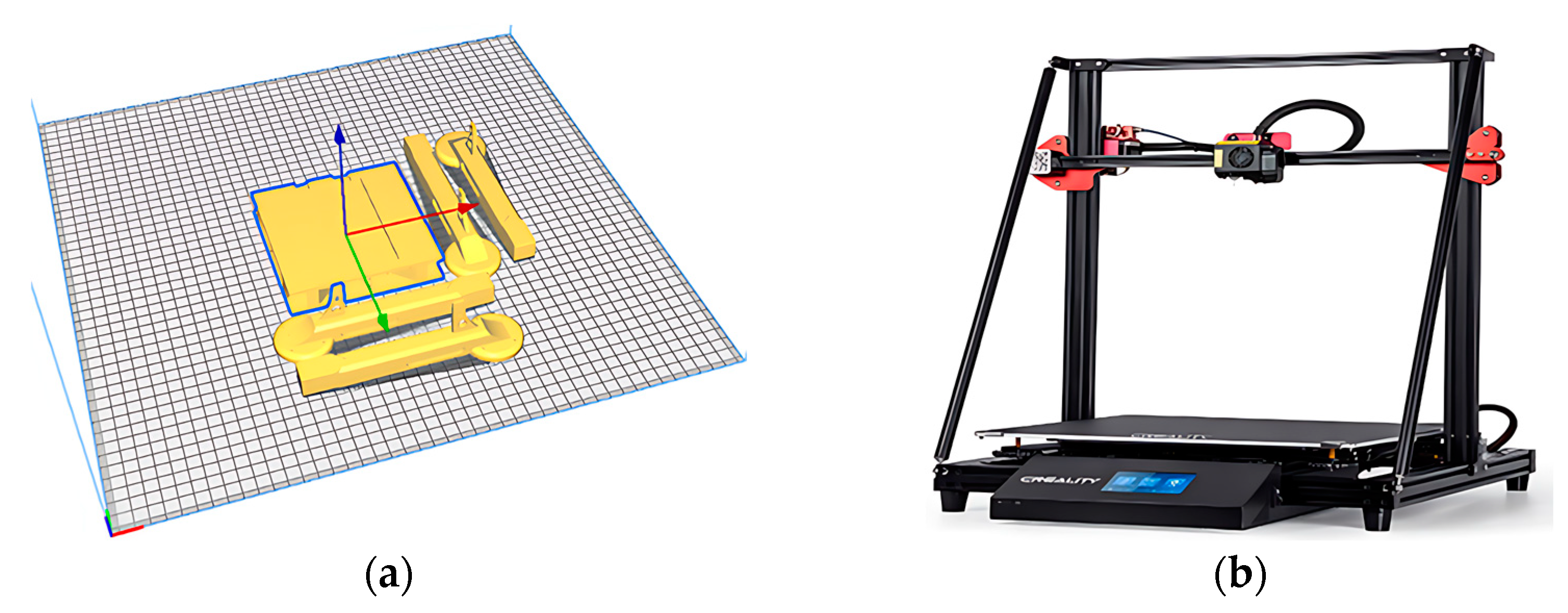
5. Additive Manufacturing
6. Limitations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| UAV | Unmanned Aerial Vehicle |
| TO | Topology Optimization |
| AM | Additive Manufacturing |
| PLA | Polylactic Acid |
| ABS | Acrylonitrile Butadiene Styrene |
| PETG | Polyethylene Terephthalate Glycol-modified |
| FDM | Fused Deposition Modeling |
| SLS | Selective Laser Sintering |
| CCPM | Cyclic/Collective Pitch Mixing |
| ESC | Electronic Speed Controller |
| PWM | Pulse Width Modulation |
| FEA | Finite Element Analysis |
| CNC | Computer Numerical Control |
| URES | U Resultant (Term used in SolidWorks to refer to a specific type of deformation) |
| K_f | Aerodynamic Force Constant |
| Ω | Rotating Speed in rad/s |
| M | Aerodynamic Moment |
| K_H | Aerodynamic Moment Constant |
| RPM | Revolutions Per Minute |
| CSI | Channel State Information |
| RIS | Reconfigurable Intelligent Surface |
| SWIPT | Simultaneous Wireless Information and Power Transfer |
| HAP | High-Altitude Platform |
References
- Abiodun, T.F. Usage of Drones or Unmanned Aerial Vehicles (UAVs) for Effective Aerial Surveillance, Mapping System and Intelligence Gathering in Combating Insecurity in Nigeria. Afr. J. Soc. Sci. Humanit. Res. 2020, 3, 29–44. [Google Scholar]
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Stampa, M.; Sutorma, A.; Jahn, U.; Thiem, J.; Wolff, C.; Röhrig, C. Maturity Levels of Public Safety Applications Using Unmanned Aerial Systems: A Review. J. Intell. Robot. Syst. Theory Appl. 2021, 103, 16. [Google Scholar] [CrossRef] [PubMed]
- Al-Haddad, L.A.; Jaber, A. Applications of Machine Learning Techniques for Fault Diagnosis of UAVs. In Proceedings of the 8th Scholar’s Yearly Symposium of Technology, Engineering and Mathematics, Brunek, Italy, 23 July 2022. [Google Scholar]
- Al-Haddad, L.A.; Jaber, A.A. An Intelligent Fault Diagnosis Approach for Multirotor UAVs Based on Deep Neural Network of Multi-Resolution Transform Features. Drones 2023, 7, 82. [Google Scholar] [CrossRef]
- Al-Haddad, L.A.; Jaber, A.A. An Intelligent Quadcopter Unbalance Classification Method Based on Stochastic Gradient Descent Logistic Regression. In Proceedings of the 2022 3rd Information Technology To Enhance e-learning and Other Application (IT-ELA), Baghdad, Iraq, 27–28 December 2022; pp. 152–156. [Google Scholar]
- Puchalski, R.; Giernacki, W. UAV Fault Detection Methods, State-of-the-Art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- Al-Haddad, L.A.; Jaber, A.A. Improved UAV Blade Unbalance Prediction Based on Machine Learning and ReliefF Supreme Feature Ranking Method. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 463. [Google Scholar] [CrossRef]
- Al-Haddad, L.A.; Jaber, A.A.; Neranon, P.; Al-Haddad, S.A. Investigation of Frequency-Domain-Based Vibration Signal Analysis for UAV Unbalance Fault Classification. Eng. Technol. J. 2023, 41, 1–9. [Google Scholar] [CrossRef]
- Al-Haddad, L.A.; Jaber, A.A.; Al-Haddad, S.A.; Al-Muslim, Y.M. Fault Diagnosis of Actuator Damage in UAVs Using Embedded Recorded Data and Stacked Machine Learning Models. J. Supercomput. 2023, 80, 3005–3024. [Google Scholar] [CrossRef]
- Kechagias, J.D.; Ninikas, K.; Stavropoulos, P.; Salonitis, K. A Generalised Approach on Kerf Geometry Prediction during CO2 Laser Cut of PMMA Thin Plates Using Neural Networks. Lasers Manuf. Mater. Process. 2021, 8, 372–393. [Google Scholar] [CrossRef]
- AL-Qaisy, A.A.S. Assembling a Smart Phone Controlled Surveillance Unmanned Quadcopter. In Proceedings of the 2018 International Conference on Engineering Technology and their Applications (IICETA), Al-Najaf, Al-Najaf, Iraq, 8–9 May 2018; pp. 81–86. [Google Scholar]
- Satra, M.K.; Shetty, S. Design Optimization and Manufacturing of Quadcopter Using 3D Printing. In Proceedings of the International Conference on Advances in Thermal Systems, Materials and Design Engineering (ATSMDE2017), Mumbai, India, 21–22 December 2017. [Google Scholar]
- Parandha, S.M.; Li, Z. Design and Analysis of 3d Printed Quadrotor Frame. Int. Adv. Res. J. Sci. Eng. Technol. 2018, 5, 66–73. [Google Scholar]
- Gardner, J.M.; Sauti, G.; Kim, J.-W.; Cano, R.J.; Wincheski, R.A.; Stelter, C.J.; Grimsley, B.W.; Working, D.C.; Siochi, E.J. 3-D Printing of Multifunctional Carbon Nanotube Yarn Reinforced Components. Addit. Manuf. 2016, 12, 38–44. [Google Scholar] [CrossRef]
- Shenoy, T.P.; Shenoy, K.P.; Khan, L.; Aziz, S.; Afran, S.; Kumar, K. Design and Development of a Novel Triphibian Quadcopter. Int. J. Eng. Technol. 2018, 7, 1–4. [Google Scholar] [CrossRef]
- Gandhi, D.A.; Ghosal, M. Novel Low Cost Quadcopter for Surveillance Application. In Proceedings of the 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 11–12 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 412–414. [Google Scholar]
- Radharamanan, R. Use of 3-D Printers to Design, Build, and Test a Quadcopter Drone. In Proceedings of the 2016 ASEE Annual Conference & Exposition, New Orleans, LA, USA, 26–29 June 2016. [Google Scholar]
- Natarajan, E.; Ang, C.T.; Lim, W.H.; Kosalishkwaran, G.; Ang, C.K.; Parasuraman, S. Design Topology Optimization and Kinematics of a Multi-Modal Quadcopter and Quadruped. In Proceedings of the 2019 IEEE Student Conference on Research and Development (SCOReD), Bandar Seri Iskandar, Malaysia, 15–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 214–218. [Google Scholar]
- Farah, S.; Anderson, D.G.; Langer, R. Physical and Mechanical Properties of PLA, and Their Functions in Widespread Applications—A Comprehensive Review. Adv. Drug Deliv. Rev. 2016, 107, 367–392. [Google Scholar] [CrossRef] [PubMed]
- Kuantama, E.; Craciun, D.; Tarca, R. Quadcopter Body Frame Model and Analysis. Ann. Univ. Oradea 2016, 71–74. [Google Scholar] [CrossRef]
- Bhandari, A.; Ahmad, F.; Kumar, P.; Patil, P.P. Design and Vibration Characteristics Analysis of Quadcopter Body Frame. Int. J. Appl. Eng. Res. 2019, 14, 66–70. [Google Scholar]
- Sheng, T.K.; Esakki, B.; Ganesan, S.; Salunkhe, S. Finite Element Analysis, Prototyping and Field Testing of Amphibious UAV. UPB Sci. Bull. Ser. D Mech. Eng. 2019, 81, 125–140. [Google Scholar]
- Zhang, Q.; Chen, J.; Yang, L.; Dong, W.; Sheng, X.; Zhu, X. Structure Optimization and Implementation of a Lightweight Sandwiched Quadcopter. In Robotics and Applications, Proceedings of the Intelligent 9th International Conference, ICIRA 2015, Portsmouth, UK, 24–27 August 2015; Proceedings, Part III; Springer: Berlin/Heidelberg, Germany, 2015; pp. 220–229. [Google Scholar]
- Chan, J.C.; Chua, S.; Tria, Z.I.; Yubontoy, H.; Chua, A. Development of a 3D Printed Quadcopter Drone through CFD Analysis. Int. J. Adv. Trends Comput. Sci. Eng. 2020, 9, 255. [Google Scholar] [CrossRef]
- Vepa, K.S.; Sagar, N. Design, Optimization and Manufacturing of Quad Copter Frame Using FDM. Int. J. Eng. Adv. Technol. 2019, 8, 1726–1731. [Google Scholar]
- Mohsin, A.K.; Abdulhady, J.A. Comparing Dynamic Model and Flight Control of plus and Cross Quadcopter Configurations. FME Trans. 2022, 50, 683–692. [Google Scholar] [CrossRef]
- Balayan, A.; Mallick, R.; Dwivedi, S.; Saxena, S.; Haorongbam, B.; Sharma, A. Optimal Design of Quadcopter Chassis Using Generative Design and Lightweight Materials to Advance Precision Agriculture. Machines 2024, 12, 187. [Google Scholar] [CrossRef]
- He, L.; Wang, P.; Wang, L.; Chen, M.; Liu, H.; Li, J. Multifunctional Polymer-Metal Lattice Composites via Hybrid Additive Manufacturing Technology. Micromachines 2023, 14, 2191. [Google Scholar] [CrossRef]
- Ebeid, M.; James, S. Design for 4D Printing of Biodegradable Shape Memory Polymers for Disposable UAV Systems. Polymers 2023, 15, 3562. [Google Scholar] [CrossRef] [PubMed]
- Šančić, T.; Brčić, M.; Kotarski, D.; Łukaszewicz, A. Experimental Characterization of Composite-Printed Materials for the Production of Multirotor UAV Airframe Parts. Materials 2023, 16, 5060. [Google Scholar] [CrossRef]
- Malim, A.; Mourousias, N.; Marinus, B.G.; De Troyer, T. Structural Design of a Large-Scale 3D-Printed High-Altitude Propeller: Methodology and Experimental Validation. Aerospace 2023, 10, 256. [Google Scholar] [CrossRef]
- Rosnitschek, T.; Baumann, T.; Orgeldinger, C.; Alber-Laukant, B.; Tremmel, S. Manufacturing Constraints in Topology Optimization for the Direct Manufacturing of Extrusion-Based Additively Manufactured Parts. Designs 2023, 7, 8. [Google Scholar] [CrossRef]
- Nvss, S.; Esakki, B.; Yang, L.-J.; Udayagiri, C.; Vepa, K.S. Design and Development of Unibody Quadcopter Structure Using Optimization and Additive Manufacturing Techniques. Designs 2022, 6, 8. [Google Scholar] [CrossRef]
- Gandhi, Y.; Minak, G. A Review on Topology Optimization Strategies for Additively Manufactured Continuous Fiber-Reinforced Composite Structures. Appl. Sci. 2022, 12, 11211. [Google Scholar] [CrossRef]
- Dangal, B.; Jung, S. The Impact of Additive Manufacturing Constraints and Design Objectives on Structural Topology Optimization. Appl. Sci. 2023, 13, 10161. [Google Scholar] [CrossRef]
- Bender, D.; Barari, A. Using 3D Density-Gradient Vectors in Evolutionary Topology Optimization to Find the Build Direction for Additive Manufacturing. J. Manuf. Mater. Process. 2023, 7, 46. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; de Cola, T.; Wang, J.-B.; Zhu, W.-P.; Cheng, J. Supporting IoT With Rate-Splitting Multiple Access in Satellite and Aerial-Integrated Networks. IEEE Internet Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- An, K.; Sun, Y.; Lin, Z.; Zhu, Y.; Ni, W.; Al-Dhahir, N.; Wong, K.-K.; Niyato, D. Exploiting Multi-Layer Refracting RIS-Assisted Receiver for HAP-SWIPT Networks. IEEE Trans. Wirel. Commun. 2024, 1. [Google Scholar] [CrossRef]
- De, S.; Guida, D. Control Design for an Under-Actuated UAV Model. FME Trans. 2018, 46, 443–452. [Google Scholar] [CrossRef]
- Dotevall, H.; Pulli, P. Balancing of an Inverted Pendulum through Adjusting Angle and Thrust of Propellers. Bachelor’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]
- Microcontrollerslab.Com. CCPM Servo Consistency Master/Servo Motor Tester. Available online: https://microcontrollerslab.com/ccpm-servo-tester-pinout-modes-features-how-to-test-servo-motors/ (accessed on 1 June 2023).
- Cao, S.; Wang, H.; Lu, X.; Tong, J.; Sheng, Z. Topology Optimization Considering Porosity Defects in Metal Additive Manufacturing. Appl. Sci. 2021, 11, 5578. [Google Scholar] [CrossRef]
- Tyflopoulos, E.; Steinert, M. Topology and Parametric Optimization-Based Design Processes for Lightweight Structures. Appl. Sci. 2020, 10, 4496. [Google Scholar] [CrossRef]
- Yuan, H.; Liu, Z.; Wei, M.; Lin, H.; Hu, X.; Lu, C. Topological Nanophotonic Wavelength Router Based on Topology Optimization. Micromachines 2021, 12, 1506. [Google Scholar] [CrossRef] [PubMed]
- Solidworks. SOLIDWORKS Help. 2022. Available online: http://help.solidworks.com/2017/english/solidworks/cworks/c_drop_test_studies.html (accessed on 1 June 2023).
- Tickoo, S. SolidWorks 2013 for Designers; Cadcim Technologies: Lake County, IN, USA, 2013; ISBN 1936646463. [Google Scholar]
- Rychlewski, J. On Hooke’s Law. J. Appl. Math. Mech. 1984, 48, 303–314. [Google Scholar] [CrossRef]
- de Araujo, A.P.M.; Carmelo, F.B.D.M.; Rocha, E.M.; Kiminami, C.S.; Gargarella, P. Effects of Process Parameters on Cold Spray Additive Manufacturing of Quasicrystalline Al93Fe3Cr2Ti2 Alloy. Powders 2023, 2, 525–539. [Google Scholar] [CrossRef]
- Belei, C.; Meier, B.; Amancio-Filho, S.T. Manufacturing of Metal–Polymer Hybrid Parts Using a Desktop 3-Axis Fused Filament Fabrication 3D-Printer. Metals 2023, 13, 1262. [Google Scholar] [CrossRef]
- Zhao, Y.; Xiong, W. Influence of Homogenization on Phase Transformations during Isothermal Aging of Inconel 718 Superalloys Fabricated by Additive Manufacturing and Suction Casting. Materials 2023, 16, 4968. [Google Scholar] [CrossRef]
- Manmadhachary, A. CT Imaging Parameters for Precision Models Using Additive Manufacturing. Multiscale Multidiscip. Model. Exp. Des. 2019, 2, 209–220. [Google Scholar] [CrossRef]
- Lee, S.H.W.; Choo, H.L.; Mok, S.H.; Cheng, X.Y.; Manurung, Y.H.P. Permeability and Mechanical Properties of Additively Manufactured Porous Maraging 300 Steel. Lasers Manuf. Mater. Process. 2021, 8, 28–44. [Google Scholar] [CrossRef]
- El Adawy, M.; Abdelhalim, E.H.; Mahmoud, M.; Ahmed Abo zeid, M.; Mohamed, I.H.; Othman, M.M.; ElGamal, G.S.; ElShabasy, Y.H. Design and Fabrication of a Fixed-Wing Unmanned Aerial Vehicle (UAV). Ain Shams Eng. J. 2023, 14, 102094. [Google Scholar] [CrossRef]
- Maity, R.; Mishra, R.; Kumar Pattnaik, P.; Pandey, A. Selection of Sustainable Material for the Construction of UAV Aerodynamic Wing Using MCDM Technique. In Materials Today: Proceedings; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Materials Used | Drone Type | Construction Technique | Key Findings | Strengths and Limitations | Relevance to Chosen Approach |
|---|---|---|---|---|---|---|
| [28] | PLA, ABS, Nylon 6/6 | Agriculture UAV | Generative design, 3D printing | Significant weight reduction, improved P/W and T/W ratios, enhanced structural efficiency. | Showcases lightweight yet robust chassis design, with stress reduction. | Aligns with PLA use, incorporates more complex materials and designs. |
| [29] | Polymer-metal composites | UAVs | Hybrid AM | Enhanced mechanical performance, ductility, stiffness, with electrical conductivity for frames. | Integrates new HAM for stronger, multifunctional structures. | Different from PLA-focused approach; introduces metal integration. |
| [30] | Biodegradable shape memory polymers | Disposable UAVs | 4D printing | Enabled smart actuation concepts with minimized part failure risks. | Focus on biodegradability and smart materials poses manufacturing challenges. | Diverges from PLA use; focuses on disposable, smart material-based UAVs. |
| [31] | Composite materials | Multirotor UAVs | SLS, FDM, CFF | CFF provides significantly higher strength for mechanically loaded parts. | Explores different AM technologies. | Broadly relevant, though emphasis on composites and AM. |
| [32] | Tough PLA, ABS | High-altitude UAVs | Fused filament fabrication (FFF) | Design of blades using 3D-printed materials validated experimentally. | Systematic approach enhances design accuracy for propellers. | Relevant; includes Tough PLA and 3D printing. |
| [33] | - | Various UAV parts | Direct extrusion-based AM | Maximized stiffness and strength with minimized support structures through TO. | Efficient use of material with design freedom; limited by need for support in AM. | Enhances understanding of design optimization for PLA structures. |
| [34] | - | Quadcopter | Fused Filament Fabrication (FFF) | Achieved weight reduction and less assembly time for monocoque quadcopter structures. | Integrates multiple analysis methods; reengineered structure benefits from less assembly time. | Highly relevant; focuses on weight optimization and FFF similar to PLA. |
| [35] | Continuous fiber-reinforced composites | - | CF4 (Continuous fiber fused filament fabrication) | Reviewed TO strategies for lightweight, high-performance designs in AM. | Emphasizes the benefits and potential of CF4 for high-performance applications. | Less direct relevance, focuses on continuous fiber materials beyond typical PLA. |
| [36] | - | - | AM | Explored the effects of AM constraints and different objectives on TO | Highlights how constraints affect part design and performance. | Informative for optimizing PLA structures with AM constraints. |
| [37] | - | - | AM | Found optimal build directions to minimize support structures TO. | Innovative use of density gradients to reduce waste in AM. | Provides insights on reducing support material in PLA printing. |
| [38] | Not specified | UAV | RSMA | Enhanced spectral efficiency and interference suppression. | Effective interference management; complex optimization. | Highlights UAV integration in network systems. |
| [39] | Not specified | HAP | RIS-assisted SWIPT | Substantial capacity gains in HAP communications. | Superior performance; relies on accurate CSI. | Demonstrates communication techniques in aerial platforms |
| Frame | X Movement (Pitching 300) | Y Movement (Rolling 300) | Z Movement |
|---|---|---|---|
| Cross | 0.1033 kg/m | 0.1033 kg/m | 0.4031 kg/m |
| Feature | Lightest | High Strength | Carrying Weight | Easy Control System | Precise Control System | Easiest to Manufacture | Less Drag Force | Most Popular and Best Selling |
|---|---|---|---|---|---|---|---|---|
| Frame | Cross and Plus | H | H | Plus | Cross | Plus | Cross | Cross |
| Part | Weight (grams) | Part | Weight (grams) |
|---|---|---|---|
| Arduino Mega 2560 | 20 | Gyroscope | 2 |
| Mega 2560 shield | 24 | Wire and connections | 9 |
| Step-down voltage | 7 | 11 volts battery | 320 |
| Receiver Radio | 5 |
| Parameter | Value | Description |
|---|---|---|
| Material | PLA | Chosen for its strength and ease of printing |
| Load Type | Thrust Force | Applied from the motors upward on the base |
| Fixed Constraints | Base of Frame | The base is fixed to simulate attachment to other parts |
| Objective | Minimize Weight | Reduce the frame’s weight while maintaining rigidity |
| Constraints | Maintain Stiffness | Ensure maximum stiffness without compromising the structural integrity |
| Mesh Conversion Format | STL | Format for exporting the optimized design for AM |
| Study | Parameters | ||||||
|---|---|---|---|---|---|---|---|
| Static Analysis | Stress (MPa) | Strain | Deformation (mm) | ||||
| Before TO | After TO | Before TO | After TO | Before TO | After TO | ||
| 0.3312 | 0.3806 | 3.505 × 10−5 | 7.89 × 10−5 | 0.03529 | 0.04475 | ||
| Drop Analysis | Stress (MPa) | Strain | Deformation (mm) | ||||
| Before TO | After TO | Before TO | After TO | Before TO | After TO | ||
| Vertical | One arm | 1.41 × 108 | 1.705 × 108 | 3.3 × 10−2 | 5.516 × 10−2 | 7.63 | 8.081 |
| Two arms 45° | 7.984 × 107 | 8.747 × 107 | 1.764 × 10−2 | 2.475 × 10−2 | 10.45 | 22.5 | |
| One arm 22.5° | 1.15 × 108 | 1.443 × 108 | 2.709 × 10−2 | 2.73 × 10−2 | 10.169 | 22.2 | |
| Specification | ABS | PLA | PETG |
|---|---|---|---|
| Density (kg/m3) | 1080 | 1240–1270 | 1270–1290 |
| Poisson’s Ratio | 0.422 | 0.35 | 0.37 |
| Young’s Modulus (GPa) | 2.9 | 3.5 | 2.0–2.7 |
| Tensile Strength (MPa) | 50 | 50–70 | 50–75 |
| Compressive Strength (MPa) | 69 | 60–65 | Good, specific values vary |
| Yield Strength (MPa) | 44.1 | 55 (varies) | 53 |
| Cost (USD/kg, approximate) | 20–25 | 25–30 | 20–30 |
| Parameter | Before TO | After TO | Traditional Frames (Average Cost USD) |
|---|---|---|---|
| Weight (grams) | 797 | 400 | N/A |
| Cost with Low-Quality PLA Price (USD) | 15.94 | 8.00 | 25.00 |
| Cost with High-Quality PLA Price (USD) | 39.85 | 20.00 | 50.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Haddad, L.A.; Jaber, A.A.; Giernacki, W.; Khan, Z.H.; Ali, K.M.; Tawafik, M.A.; Humaidi, A.J. Quadcopter Unmanned Aerial Vehicle Structural Design Using an Integrated Approach of Topology Optimization and Additive Manufacturing. Designs 2024, 8, 58. https://doi.org/10.3390/designs8030058
Al-Haddad LA, Jaber AA, Giernacki W, Khan ZH, Ali KM, Tawafik MA, Humaidi AJ. Quadcopter Unmanned Aerial Vehicle Structural Design Using an Integrated Approach of Topology Optimization and Additive Manufacturing. Designs. 2024; 8(3):58. https://doi.org/10.3390/designs8030058
Chicago/Turabian StyleAl-Haddad, Luttfi A., Alaa Abdulhady Jaber, Wojciech Giernacki, Zeashan Hameed Khan, Khalid Mohsin Ali, Mauwafak Ali Tawafik, and Amjad J. Humaidi. 2024. "Quadcopter Unmanned Aerial Vehicle Structural Design Using an Integrated Approach of Topology Optimization and Additive Manufacturing" Designs 8, no. 3: 58. https://doi.org/10.3390/designs8030058
APA StyleAl-Haddad, L. A., Jaber, A. A., Giernacki, W., Khan, Z. H., Ali, K. M., Tawafik, M. A., & Humaidi, A. J. (2024). Quadcopter Unmanned Aerial Vehicle Structural Design Using an Integrated Approach of Topology Optimization and Additive Manufacturing. Designs, 8(3), 58. https://doi.org/10.3390/designs8030058