1. Introduction
The ground transportation industry requires versatile vehicle designs that can operate in varying environments to meet customer demands and satisfy legislative requirements. Manufacturers must consider the powertrain designs (internal combustion engine, electric motors with a battery pack) and associated thermal management system (TMS) for driving cycles during the design phase. This leads to the oversizing of system components for the max possible heat loads, which in turn increases the TMS power consumption. Power is supplied to electromechanical actuators so that component temperatures are maintained within the prescribed limits. The TMS architectures have computer-controlled variable speed fans, pumps, and flow control valves [
1]. This approach enables the minimization of cooling system power consumption while maintaining the desired temperature. Studies by Saidur et al. [
2] and De Almeida et al. [
3] demonstrated the potential energy and cost savings of variable speed drives for electrical motors and pumps. Electrical vehicles (EV) have a higher energy efficiency but require a lower operating temperature in comparison to internal combustion (IC) engine-propelled vehicles [
4]. An inverse correlation between a battery’s capacity fade rate (i.e., battery life) and temperature exists according to Smith et al. [
5]. Similarly, an IC engine’s life is also reduced at higher temperatures due to the increase in the wear and tear of parts [
6]. Regardless of the power source, an effective cooling system is crucial for the overall efficiency of a vehicle.
Controlling the operating temperatures of the various components at their peak efficiency values is one of the many difficulties faced by cooling system design engineers. These temperatures are controlled within a specified range using a variety of cooling architectures (e.g., single-radiator, multi-core radiators, and heat pipe-based cooling systems) and modes (e.g., air, liquid, and hybrid). The range is determined based on the component to be cooled. For instance, IC engines have a much greater tolerance for temperature variations when compared to electric motors. This was demonstrated by Lang et al. [
7] and Park and Jung [
8,
9] in their respective computer simulations of a hybrid electric vehicle (HEV) cooling system. Additionally, the various driving modes of an HEV—pure electric, pure combustion, and hybrid—each have their own cooling requirements. A cooling system built to handle a single thermal load may be insufficient in handling rapidly changing operating circumstances. Moreover, planning for the best operating and cooling conditions wastes energy and degrades performance. Consequently, it is necessary to modify the cooling system to meet real-time requirements.
Automotive cooling systems can be optimized by altering internal variables (e.g., radiator size, coolant pump design, and operating mode) and controlling system variables (e.g., fluid flow rates). A novel non-iterative computational calculation method for crossflow heat exchangers was developed by Węglarz et al. [
10]. Their proposed model considers physical dimensions (e.g., Reynold’s and Nusselt numbers) and control variables (e.g., coolant volumetric flow rate) to estimate the heat removal rate. Delouei et al. [
11,
12] showed the effects of using ultrasonic vibration technology to improve the performance of a finned heat exchanger. They applied this effect to improve the overall efficiency of the thermal management system for cooling electronics. Donno et al. [
13] created a design optimization method for automotive cooling system centrifugal pumps. Wang et al. successfully reduced the radiator power consumption by 67% by controlling the angular speeds of a fan array [
14]. A review of the Euro4-EPA/02 standard was discussed by Valaszkai and Jouannet [
15]. They proposed possible technical solutions to optimizing a heavy-duty truck’s cooling system in order to meet said standards. A geometrical design optimization tool for a water-cooling system of a high-power insulated gate bipolar transistor was developed by Bahman and Blaabjerg [
16]. Su et al. [
17] integrated a set of thermoelectric generators into an engine cooling system for energy optimization. Plessis et al. [
18] conducted a pilot study to determine the cost effectiveness of variable speed drives for a mine cooling system.
System dynamic modeling, controller design, and experimental research have been conducted on a scalable multi-radiator TMS concept. By actively controlling fluid flows across individual heat exchangers, the desired operating temperature can be finetuned. Ideally, additional smaller radiators can be added based on the cooling demands. The following sections make up the rest of the article. In
Section 2, the proposed system is further described. The modeling and controller design will be discussed in
Section 3. Following that, a case study and the experimental findings are described in
Section 4. The conclusion is presented in
Section 5 and is followed by a Nomenclature List.
3. Modeling and Control of the Thermal System
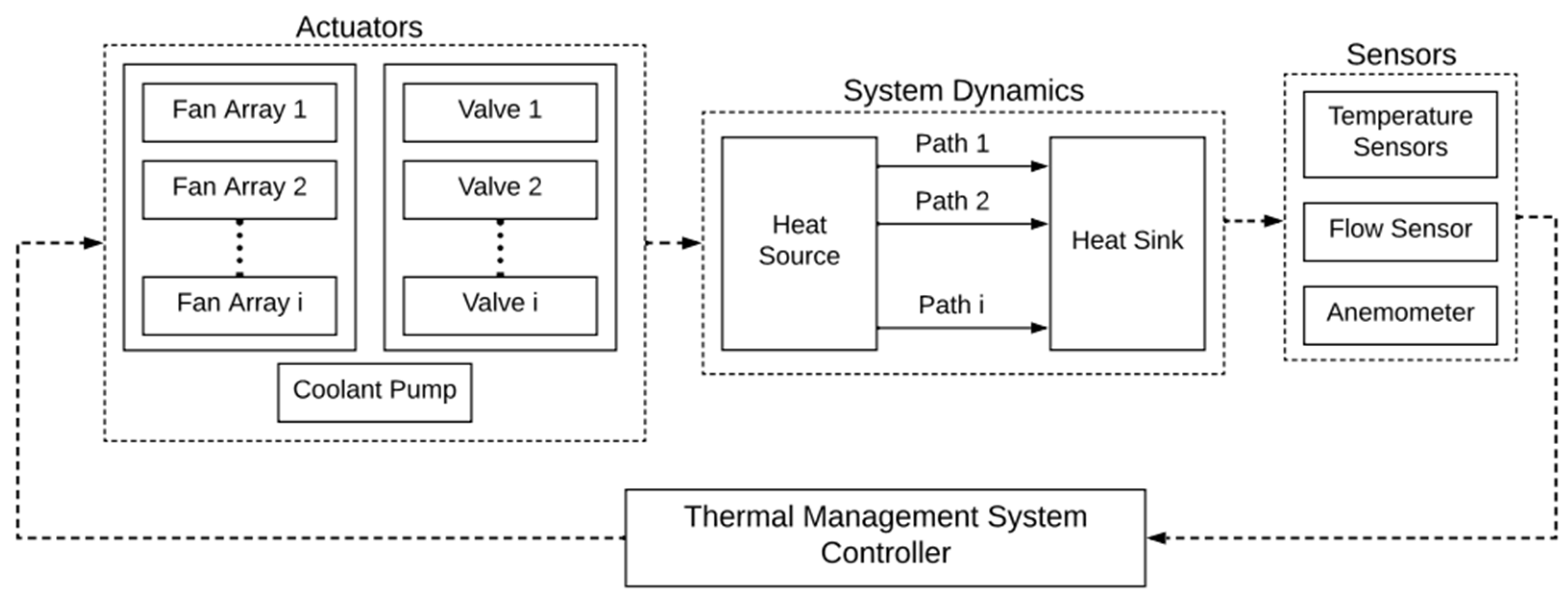
A set of mathematical models were developed to describe the scalable multi-radiator cooling system. The model encompasses governing equations, fan and pump power consumption routines, and heat flow pathways for a comprehensive system analysis. The system’s thermal nodal network primarily features convection heat transfer. The
ith radiator’s coolant volumetric flow rate,
, is a function of the outlet valve position,
, and the total coolant flow rate,
. The valves are either open (
) or closed (
).
The heat input, , can correspond to chemical fuel combustion or joules heating processes for E/HE vehicles. The radiator’s heat rejection rate to the ambient, , was modeled using the NTU-Effectiveness method to keep it independent of the downstream fluid temperatures.
The overall volumetric flow rates for the coolant,
, and air,
, are regulated using computer-controlled variable speed actuators (i.e., pump and fans). The energy consumption of the radiator fans and coolant pump was experimentally investigated using current and frequency readings (i.e.,
,
) and plotted against the fan rotor and pump shaft angular speeds to obtain empirical relations. The fans are controlled by varying the current,
, whereas the pump is controlled by varying the applied frequency,
. The experimental readings for the voltage and current are presented in
Table 1. Note that there are three radiator fans per radiator in the experimental setup.
A nonlinear state space model can effectively represent the experimental setup with internal cavity volumes (i.e.,
and
), nodal temperatures (i.e.,
and
), and flow rates (i.e.,
and
) as the system constants, states, and inputs, respectively.
where
and
are the air volumetric flow rate and effectiveness for the ith radiator, respectively.
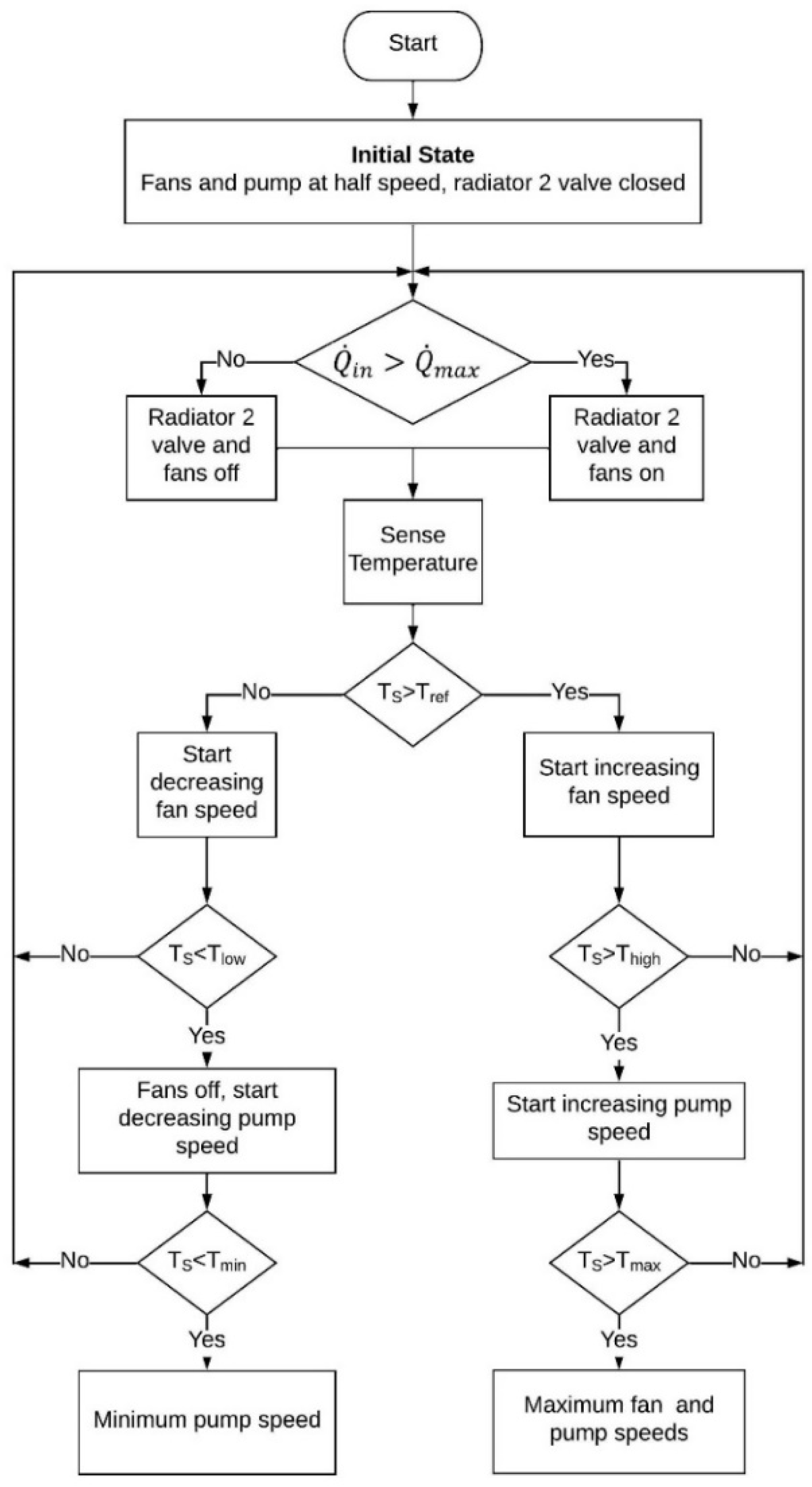
A stateflow controller was designed to regulate the coolant temperature within the desired range (i.e.,
), as shown in
Figure 2. The radiator fans and outlet valve for the second radiator are switched off for low thermal loads. The setup starts with fans and a pump at half-capacity. Even for
, the coolant pump provides the minimum flow to allow for circulation within the circuit, but fans are turned off. As the device temperature crosses the minimum threshold temperature (i.e.,
, the pump speed is linearly increased until it reaches the half flowrate at
. At this point, the fans are turned on, and their speed rises such that, at
, both the pump and fans are at their half-speed values. The fan speed trend continues until the
. The coolant flow rate starts increasing again at
. Both the pump and fan speeds are maxed out beyond
.
4. Experimental System and Test Results
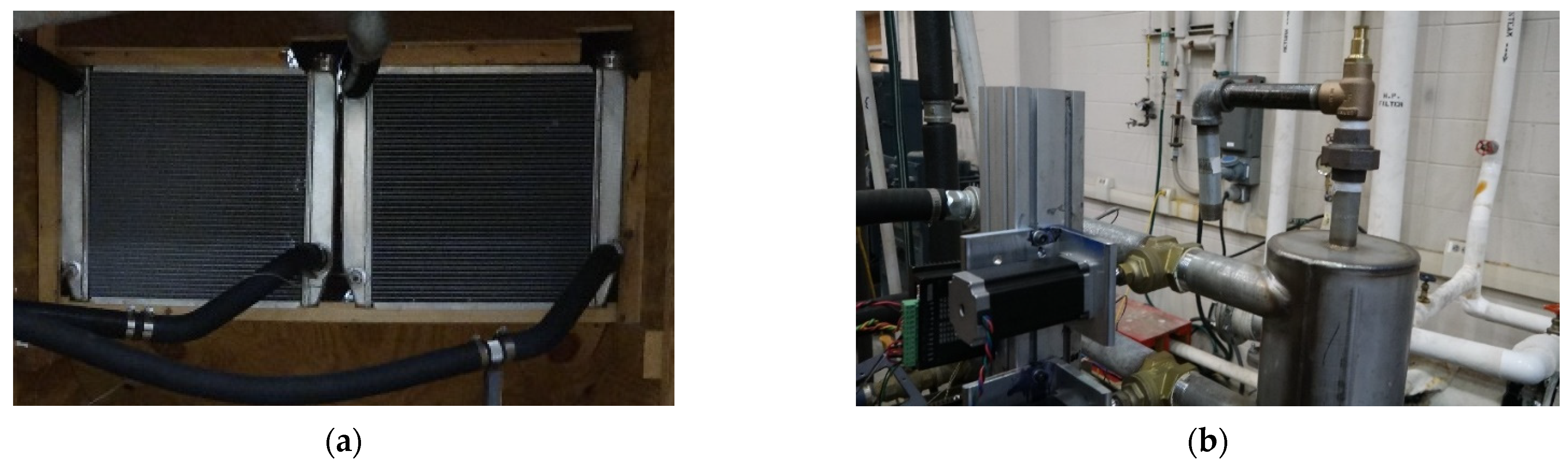
The performance of the multi-radiator concept was experimentally investigated in a laboratory. The experimental test bench shown in
Figure 3 includes a set of identical radiators cooling a 5.0 L international V8 diesel engine block. The engine block acts as a thermal capacitor for the cooling circuit. The heat load is controlled using a facility steam-powered shell and a tube heat exchanger. The coolant flows from the twin radiators (
Figure 3a) are mixed in a swirl pot (
Figure 3b) before being sent back to the engine block. The test rig is monitored using a series of electronic sensors, including six thermocouples, a hall effect flow sensor, and a handheld anemometer. A multimeter was used to record the current and voltage readings throughout the test run. The computer control was implemented using a data acquisition system that records real-time sensor values and directs the system actuators to control fluid flows. A more detailed schematic and instrumentation list has been presented in the previous work, which involved experimentally validating the mathematical models [
19]. The developed computer models were used to compare the different modes in terms of maintaining the coolant temperature.
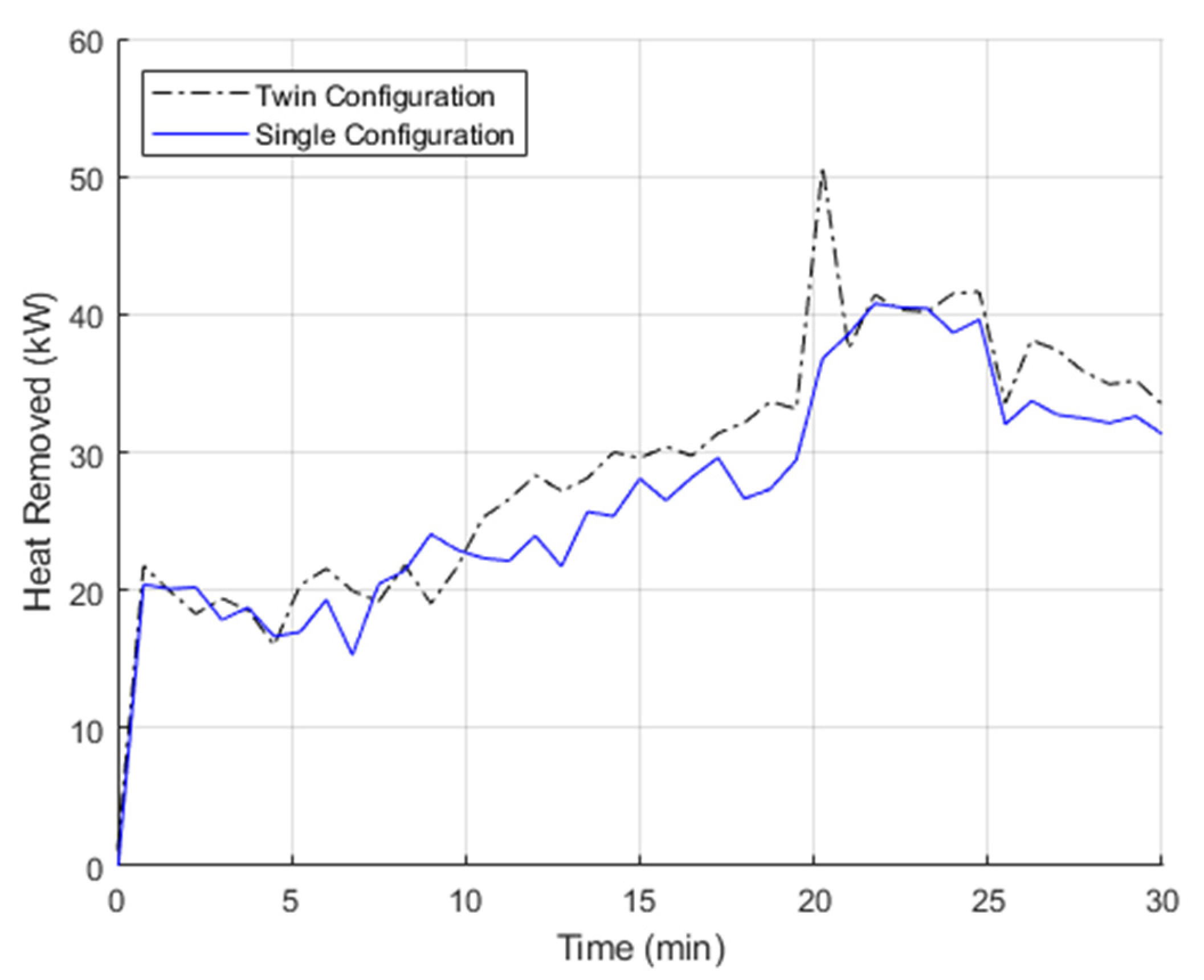
The steam inlet valve was used to provide a series of varied thermal loads while maintaining the desired coolant temperature using the stateflow controller discussed in
Section 3. The stated heat values were designed to mimic a vehicle starting from rest. After a 20 min drive, an increased thermal load is scheduled for a 5 min interval before moving back to the initial value. This is observed in the heat removal plot shown in
Figure 4. This approach shows the system behavior when a high thermal load is anticipated beforehand and/or emergency cooling is required at a moment’s notice. The experiment was repeated for two radiator configurations—twin (case A) vs. single radiators (case B). For case A, the additional radiator outlet valve and corresponding fans are closed until the higher cooling is required.
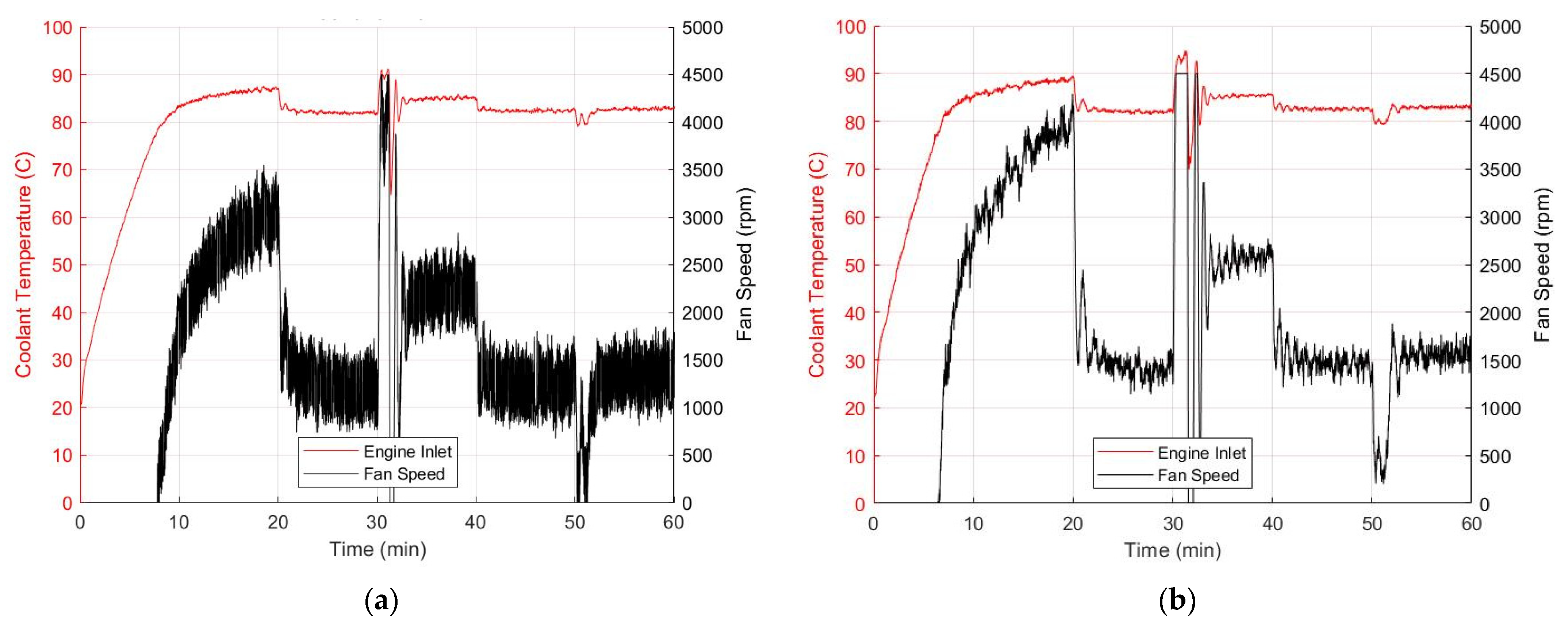
The engine coolant temperature and radiator fan speed data were logged to see the system behavior under different loads (refer to
Figure 5). The setup acts like a single large radiator when both outlet valves are open throughout the 30 min period. Case A had a shorter warmup time (~10 min) and maintained the coolant temperature closer to the reference value (
°C). The sharp drop in temperature at 20 min is due to the sudden influx of the room temperature coolant from the inactive radiator. In contrast, case B caused overcooling and has a longer warmup time of about 13 min. Though both cases maintained the coolant temperature around the chosen reference value successfully, the proposed multi-radiator architecture had a much better temperature-tracking performance.
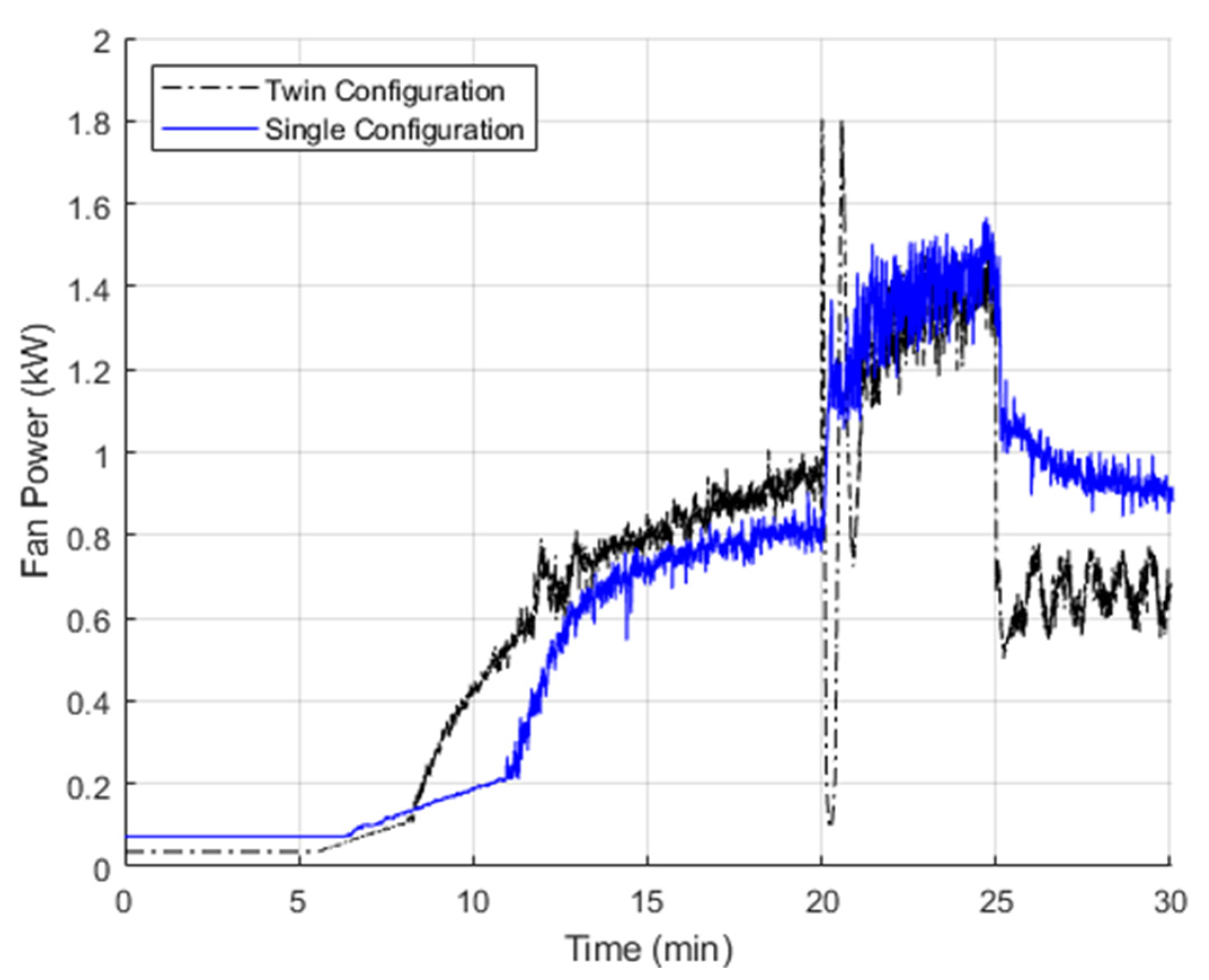
The energy efficiencies of the two configurations were studied based on the radiator fan power consumption. The coolant pump used for the experiment was oversized and used three-phase AC power.
Figure 6 shows the net power consumption by all active fans during the test runs. The data, derived using the empirical relations, show that both cases had an almost similar power draw during the initial two phases, but the twin radiator design consumed ~0.3 kW less power during the last 5 min. Since most vehicles operate in the third phase, this power schedule is expected to provide significant energy savings for a variable-speed radiator fan cooling system. The fan energy requirement for the two cases is presented in
Table 2 and shows 4.6% savings.
5. Controller Case Study
An effective automotive cooling system controller should minimize the actuator power consumption while also maintaining the reference temperature. To compare the temperature tracking performance, two other controllers were studied: sliding mode control (SMC) and classical. Sliding mode controllers are often chosen for their robustness and ability to handle sudden and significant system disturbances/parameter variations. Additionally, they provide excellent system state trajectory tracking along the chosen sliding surface (). A key factor for SMC implementation is the design of a nominal continuous controller that ensures asymptotic closed loop system stability, which can be designed using any known state feedback methods.
The control objective is to maintain the engine temperature at the set point (
= 85 °C) by eliminating the temperature error,
. The radiator fans tend to be the major source of power consumption. Hence, the fan speed, ω, is taken as the primary control input. The coolant pump is controlled with a classical controller with proportional,
, and integral,
, gains. To study the control system thermal behavior, radiator one’s outlet valve will be fully open, while radiator two’s valve will be opened during high thermal loads, along with the corresponding electric fans. The radiator fans are all operated at the same speed when activated.
The performance of the two controllers was compared using a series of experimental tests with varying thermal loads. The experimental tests are divided into five phases depending on the time and heat loads that correspond to different operating scenarios, as listed in
Table 3. For instance, the operating cycle includes idle–moderate–high thermal load cases such as stationary power generation demands. Note that radiator 2 is only used during the third and fourth phases, whereas radiator 1 is always active. The corresponding fans are also activated/deactivated accordingly.
Figure 7 shows the engine temperature and corresponding fan speeds for the sliding mode and classic controllers, respectively.
As observed in
Figure 7, the sliding mode controller has a quick response time of about 2 min and a low temperature offset (3–5 °C). However, the high fan oscillation is a major concern since it may lead to equipment damage/malfunction. The classical control has a better warmup time (5.2 min) but has a slightly higher response time of about 3.34 min. However, like the sliding mode control, it too had undesirable fan speed oscillations.
6. Conclusions
A vehicle cooling system with several parallel heat exchangers gives designers more flexibility in responding to shifting thermal loads and environmental circumstances. To show the system behavior using several electronic controlled actuators, a series of reproducible experiments were conducted. The tests demonstrate that the suggested architecture can function with just one radiator under low thermal loads (~20 kW) while activating the second radiator to accommodate larger engine torque situations (~40 kW). Furthermore, switching to a single-radiator arrangement under a lower thermal load scenario provided energy savings (~4.6%) and had a better temperature tracking and faster warmup time (~3 min improvement). The proposed technique can be used for emergency cooling to quickly bring the engine temperature within acceptable ranges, according to the experimental results. Since the sliding mode controller has a relatively low response time and offset but has significant fan speed oscillations, it is recommended for short-duration high-performance applications (e.g., formula racing). Similarly, the stateflow controller is suitable for applications with long run times (e.g., on-road passenger vehicles) since it has the lowest fan oscillation, along with a low offset. Lastly, the classic PI control is suitable as a middle ground, having the fastest warmup, slight fan oscillations, and a modest response.
Future work will involve studying the implementation of advanced nonlinear controls (e.g., model predictive control), the effects of ram air, and a cost–benefit analysis. The proposed scalable multi-heat exchanger design can be implemented for both stationary and mobile applications. Furthermore, by providing additional control variables, the design engineers can better control the component temperature while achieving an efficient energy performance.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}