Open-Source Digitally Replicable Lab-Grade Scales



Abstract

1. Introduction
2. Materials and Methods
2.1. Design
2.2. Bill of Materials
2.3. Manufacturing and Assembly
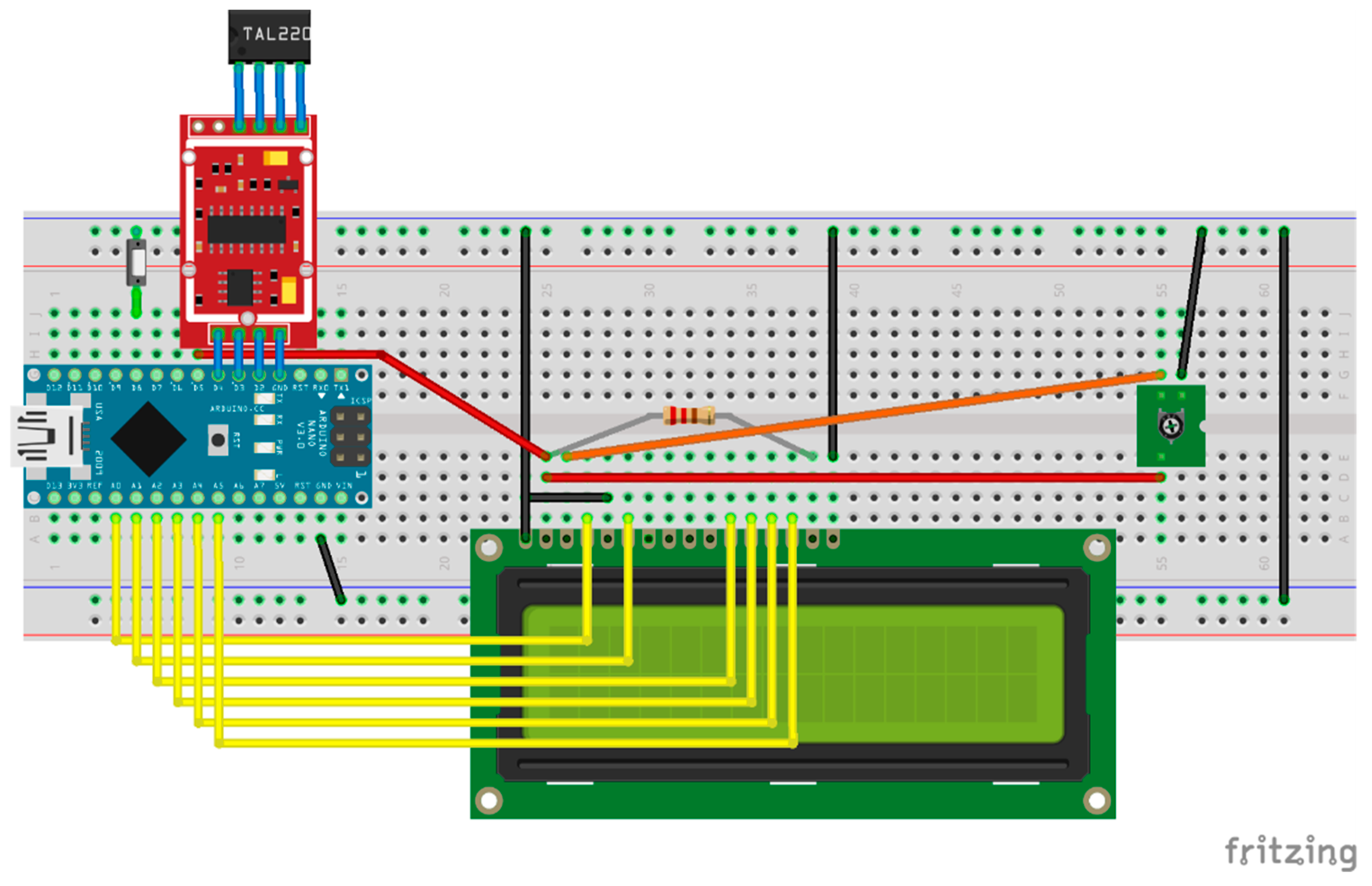
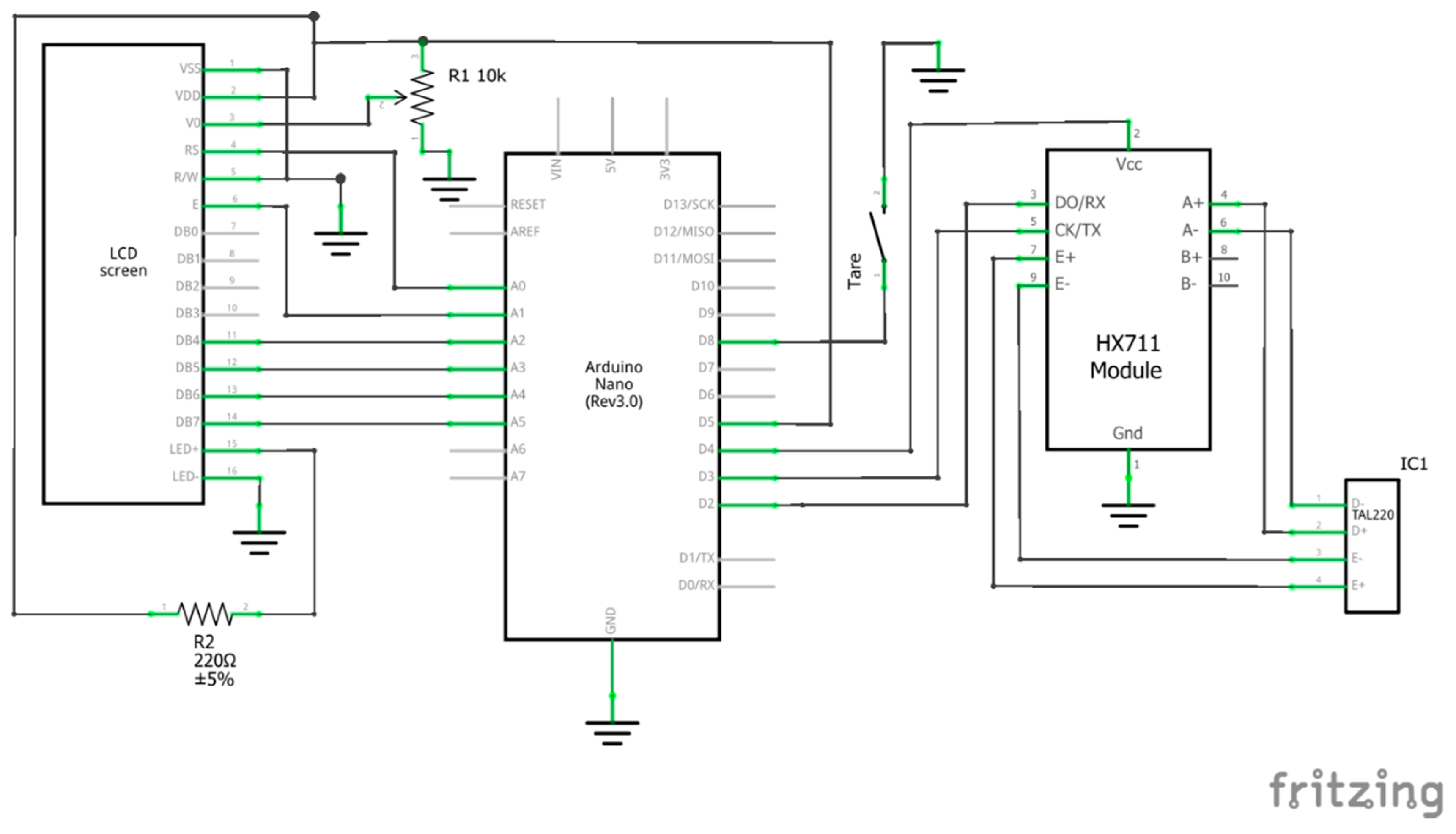
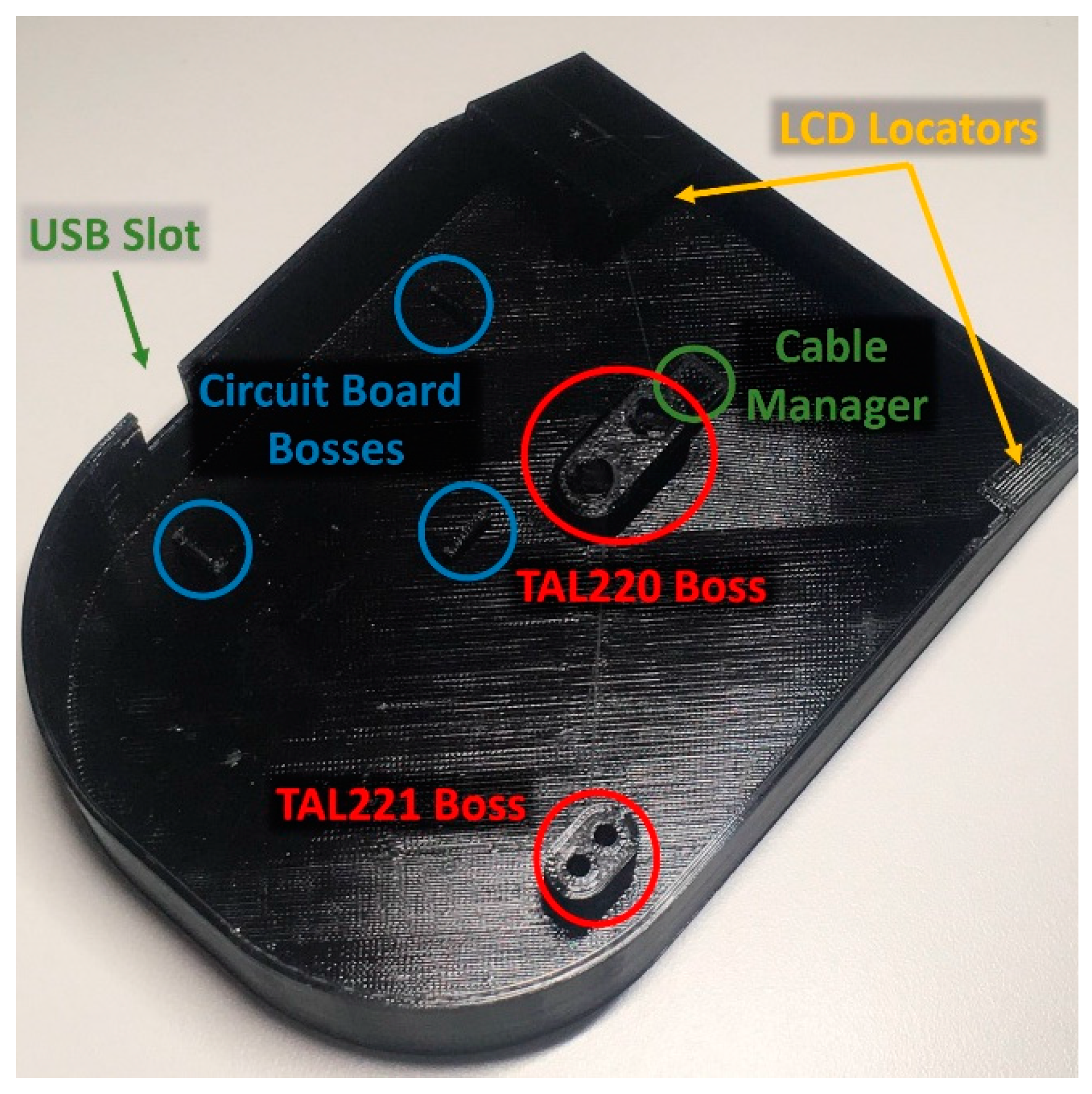
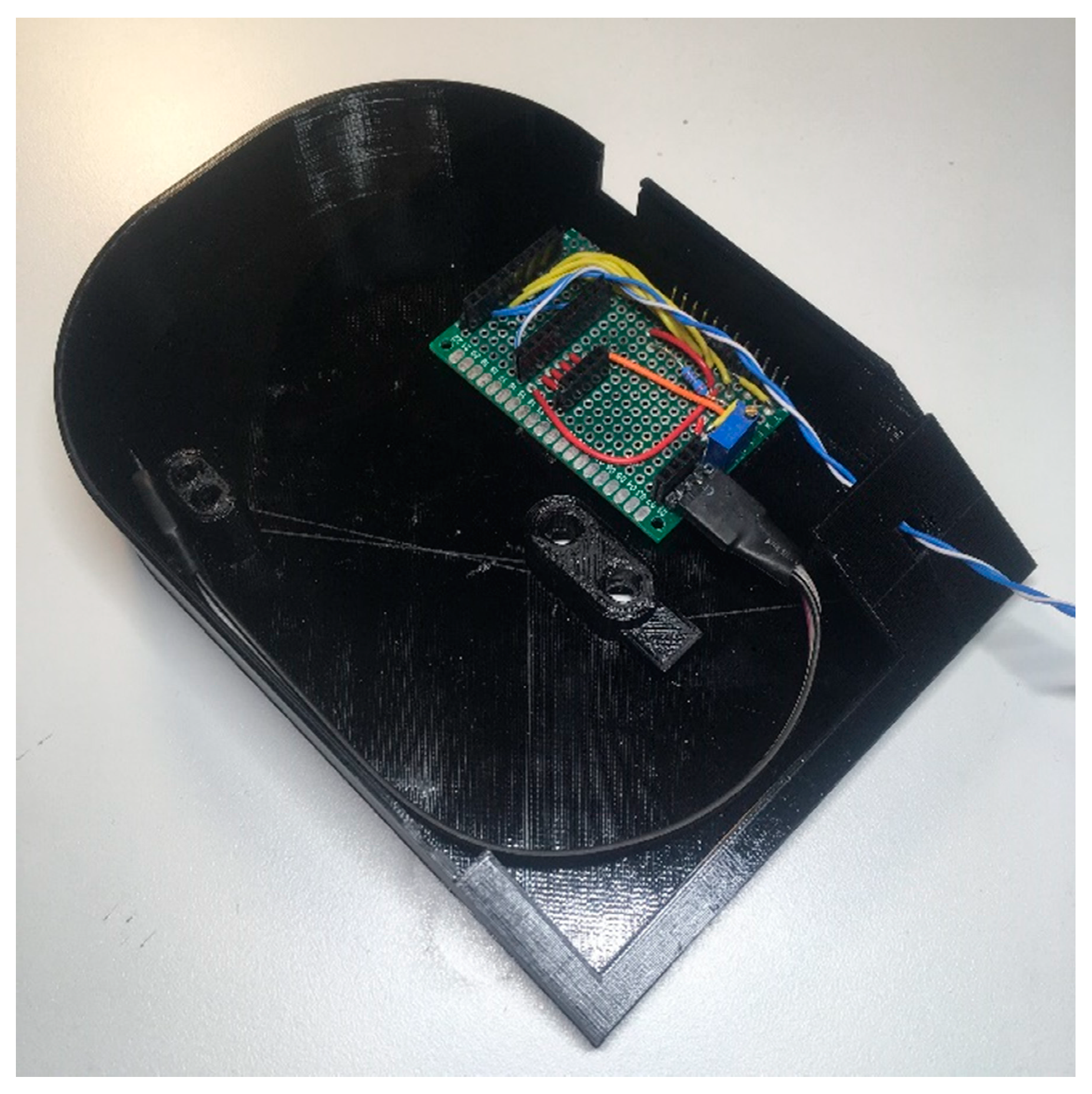
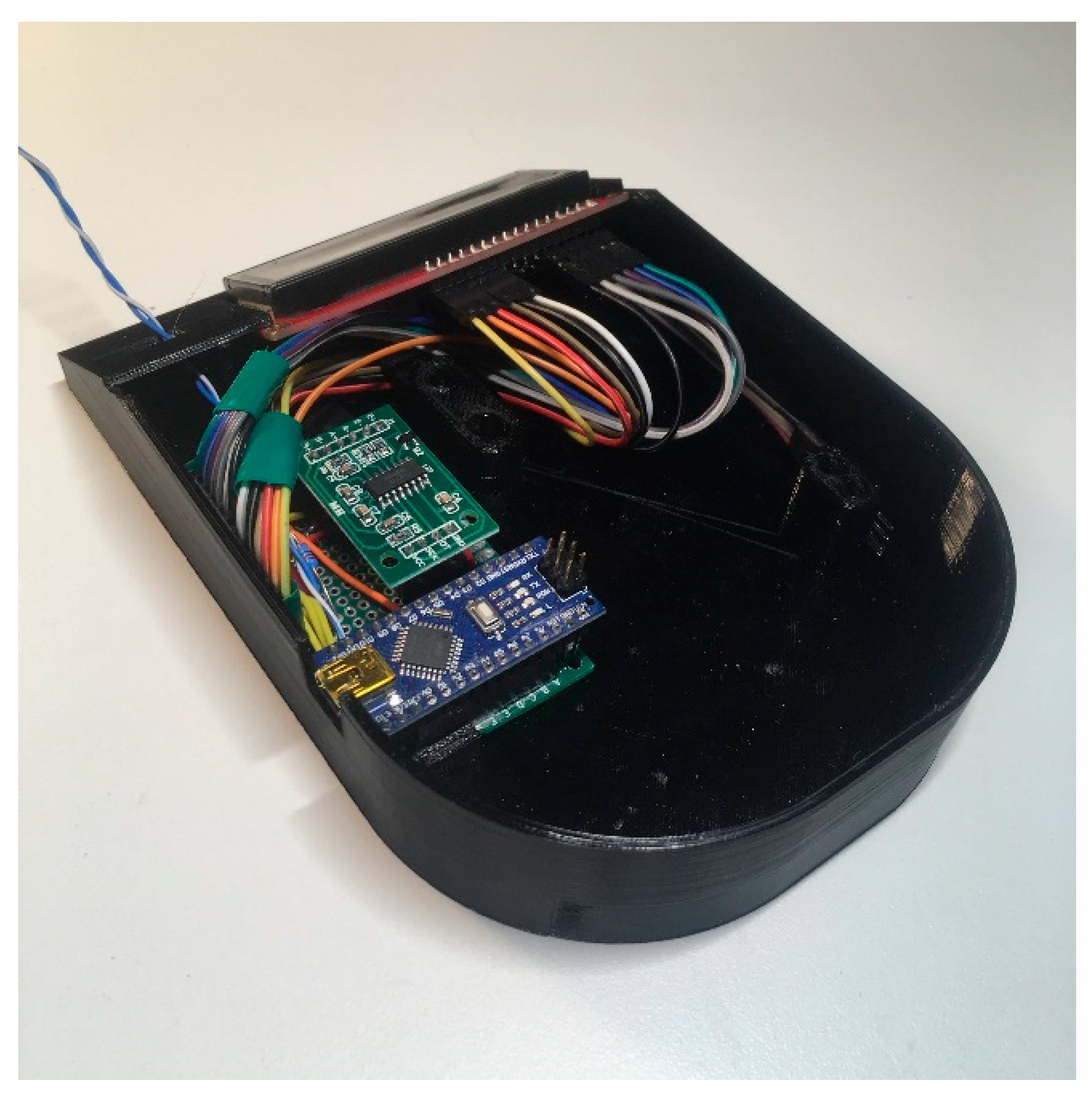
- TAL220: Install the M5 end (the wires run to this end) to the TAL220 boss on the base of the scale (Figure 7). Connect the load cell to the HX711 pinouts—Red:E+, Black:E–, White:A–, Green:A+. Snap the cover onto the base—this fully encloses the electronics, offering some protection from thermal variations on the amplifier. Attach the bed to the load cell using the M4 bolts.
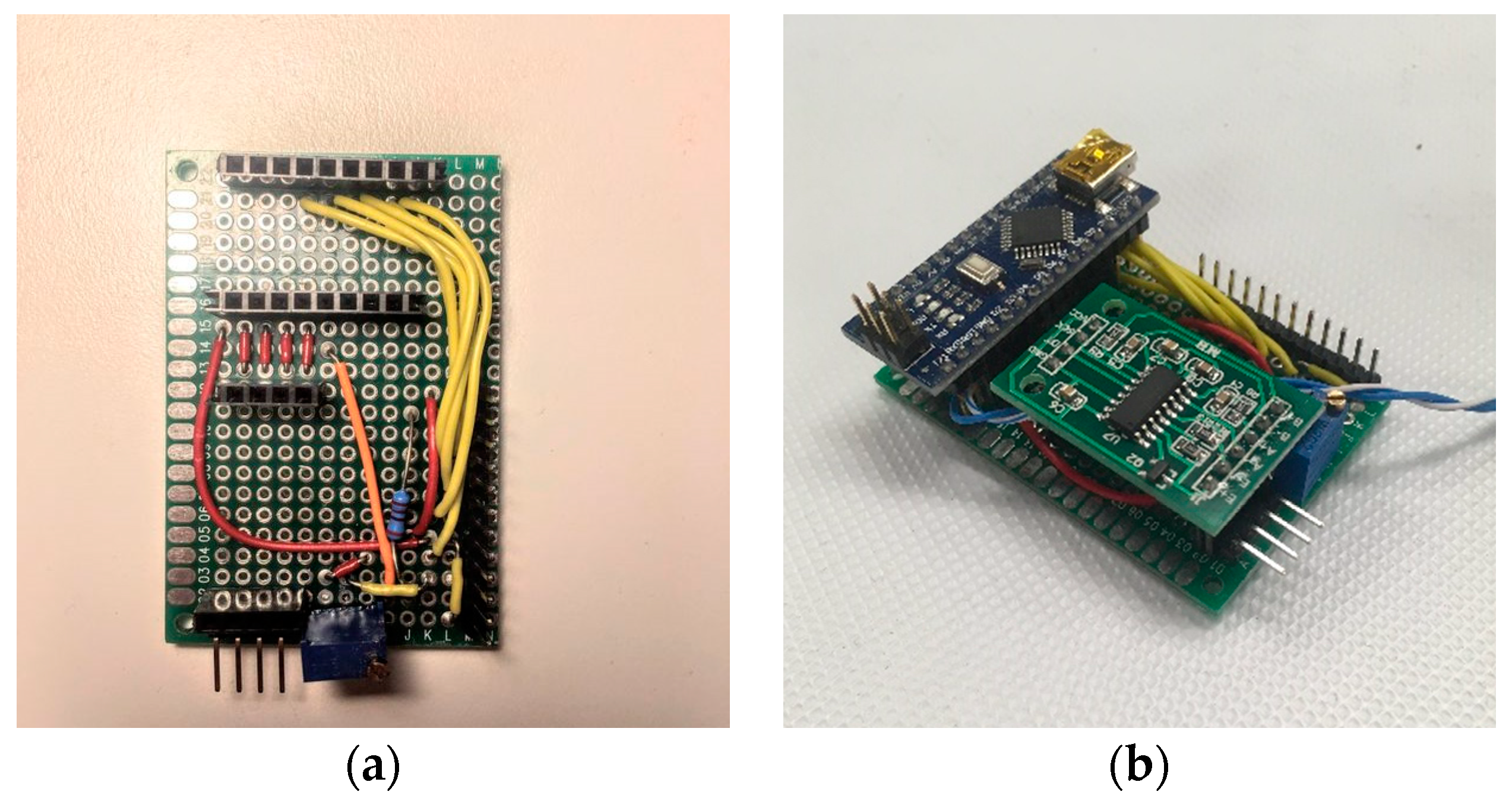
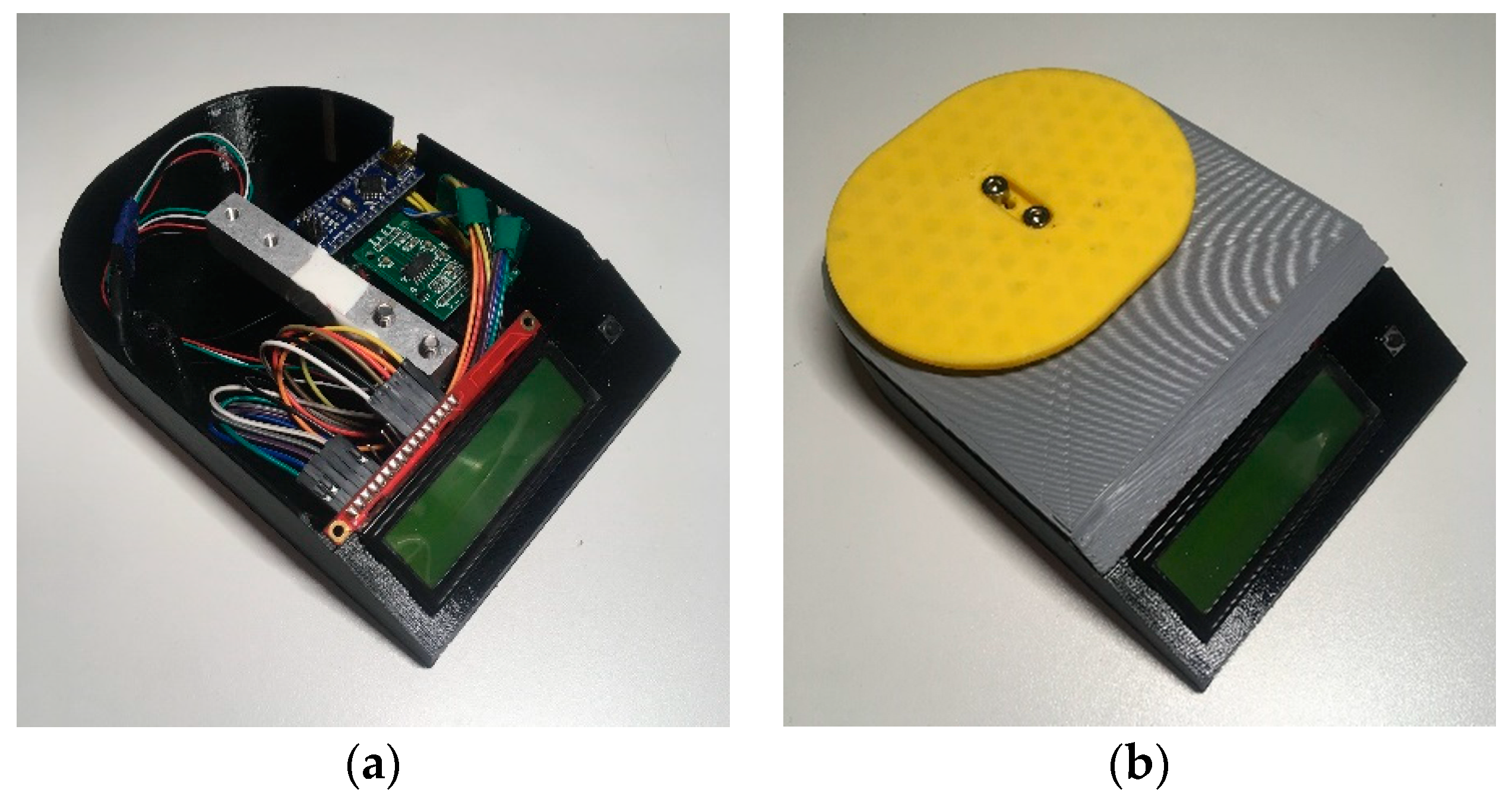
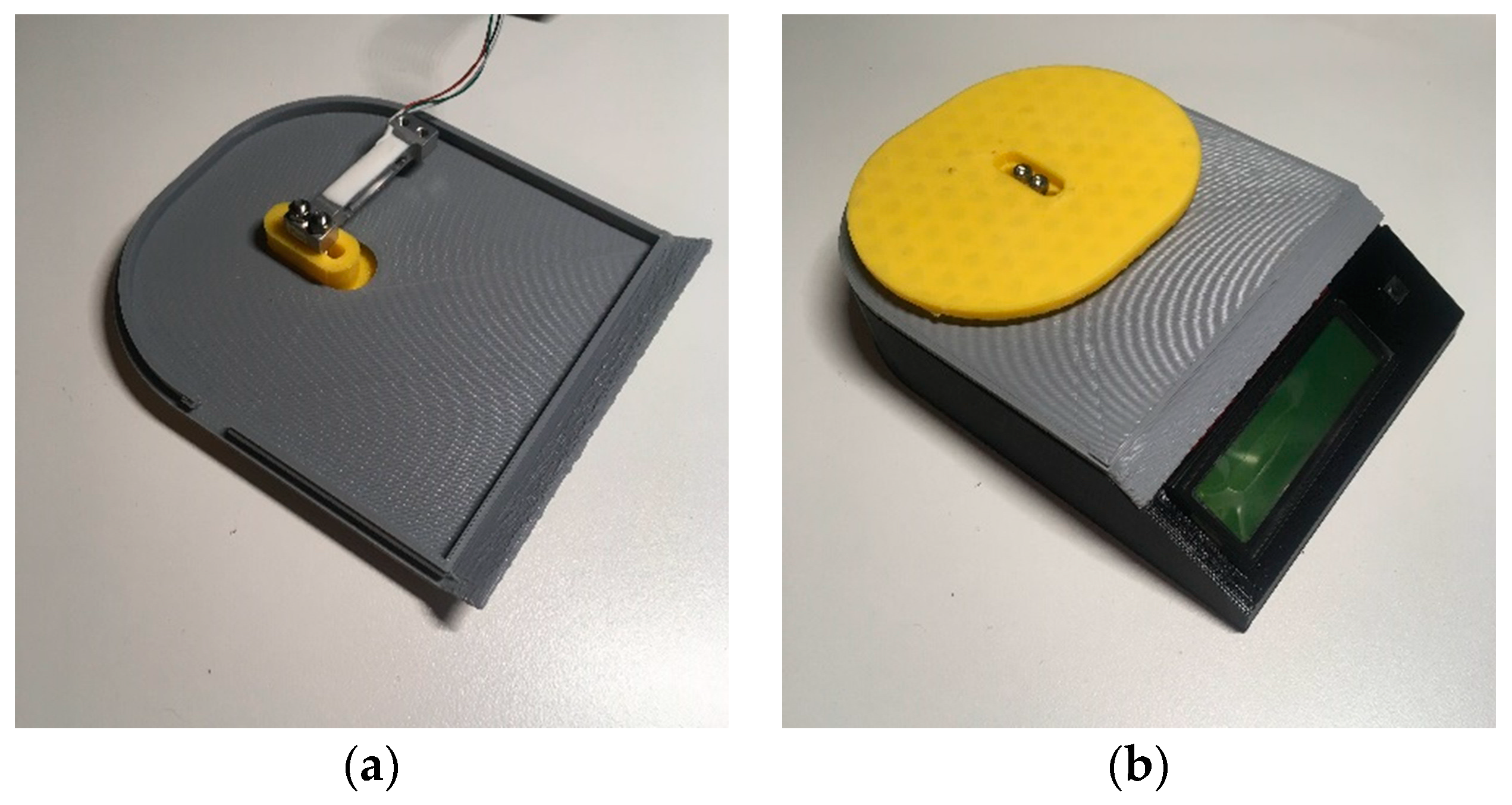
- TAL221: Sandwich the cover between the bed and the load cell. Connect the untapped end of the load cell (the wires do NOT run to this end) to the bed using M3 screws and nuts (Figure 8a). Connect the load cell to the HX711 pinouts—Red:E+, Black:E–, White:A–, Green:A+. Finally, attach the tapped M3 end to the TAL221 boss on the base (Figure 8b). This fit is tight so the wires on the load cell lead off the end fixed to the base.
2.4. Firmware
- Config.hpp contains configuration variables for the HX711, the LCD, and calibration and serial communication protocols.
- Libraries.hpp contains ‘#include’ statements for all the libraries used by DigitalMassBalance.
- Pinouts.hpp contains definitions for the location of hardware connections to the Arduino. These can be modified to accommodate the pinouts used in a particular setup.
- Initialize a 9600 baud serial connection. The firmware is set to wait for serial communication to initialize before continuing. Please note that this does not noticeably affect startup time when receiving power from a non-serial-enabled device (such as a 5V power block or a battery).
- The HX711 undergoes a similar startup procedure, receiving power and ensuring proper communication. This is indicated by a series of readouts over serial.
- If an LCD is expected by the firmware (set in Config.hpp), the LCD is powered up. Once it is on, all digits of the display flash with the character ‘8’ for less than a second. This initialization is also indicated by readouts over serial.
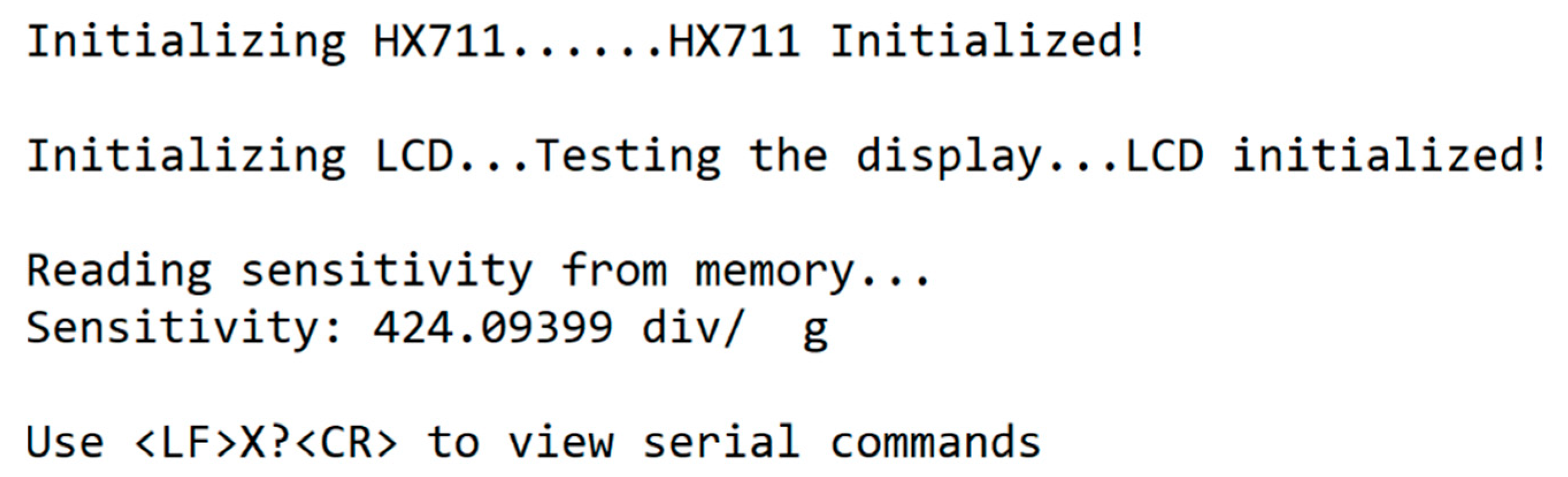
- With the hardware running, the Arduino checks its hard memory (EEPROM) for a saved calibration sensitivity (such a value is saved at the end of a calibration sequence). If one exists, the sensitivity is read and applied to the digital readout. If no sensitivity is saved, the scale defaults to a value of 1, which just returns the raw measurement from the HX711. The read sensitivity value is reported over serial. This message completes unsolicited responses from the scale—all further communication from the Arduino result from commands sent over serial. A complete, successful initialization is shown in Figure 9.
- At the time of writing, a simple averaging window is used to stabilize measurements from the scale. Measurements are stored in a first-in-first-out (FIFO) queue whose size is set in Config.hpp. The size of this window affects the response time of the scale. During initialization, this queue is automatically cleared to an array of zeros.
- Finally, the tare button is set to an input in INPUT_PULLUP mode, which makes use of an internal pullup resistor. This setting saves component cost and makes the tare button active LOW.
2.5. Operation of Design
2.5.1. Simple Scale
- Tare: A press and release of the push-button on the front of the device will tare the scale to the current weight. The push-button is acknowledged when closed (pushed) by a dot on the lower right-hand corner of the LCD.
- Calibrate: Pressing and holding the push-button for at least 3 seconds (the wait time is adjustable in Config.hpp) will initialize a calibration sequence using the calibration mass set in Config.hpp. The scale will tare, then indicate the mass to apply to the bed. After detecting an added mass, the scale will measure the mass for 10 averages, then calculate the new scale sensitivity and save it to EEPROM.
2.5.2. Lab Scale with Serial Interface
- Return displayed weight <W>.
- Zero the scale <Z>.
- Run scale diagnostics <D>. This is specified by SMA to check for memory or calibration errors.
- Return ‘about’ information for the scale <A>, <B>. These are specified by SMA to return information about the scale’s compliance level and firmware information.
- Reset the scale <ESC>.
- Continuously report weight <R>. Returns weight at the read rate until another command is received.
- Tare the scale <T>. This is different from zeroing in that the tare is for, as an example, ignoring the mass of a container. Meanwhile, zero is intended to set ‘zero’ for the scale with nothing on the bed.
- Clear the current tare <C>. This sets the tare weight to zero, causing further readouts to reference to the zero set by <Z>
- Return the tare weight <M>.
- Calibrate the scale <XC><xxxxxx.xxx> Enters a calibration cycle for the weight specified by <xxxxxx.xxx>. <XC> on its own may also be used to enter a calibration sequence using the default calibration mass set in Config.hpp
- Toggle power to the LCD <XL>. This changes the power state of the LCD, either turning it off or reinitializing it. This can be used for power savings when the display is not needed.
- Scroll output precision <XP>. This scrolls the number of digits on the readout between 0 and 4.
- List possible commands <X?>. This lists the recognized commands for the user. Since the leading X (required by SMA SCP 0499) is non-intuitive, it is indicated at the completion of the setup loop (Figure 9).
2.6. Validation
2.6.1. Laboratory-Grade Scale Comparison
2.6.2. Self-Calibration of Open-Source Scale for 100 g TAL221
2.6.3. Measurement on Open-Source Scale Using Standard Masses
2.7. Economic Analysis
3. Results
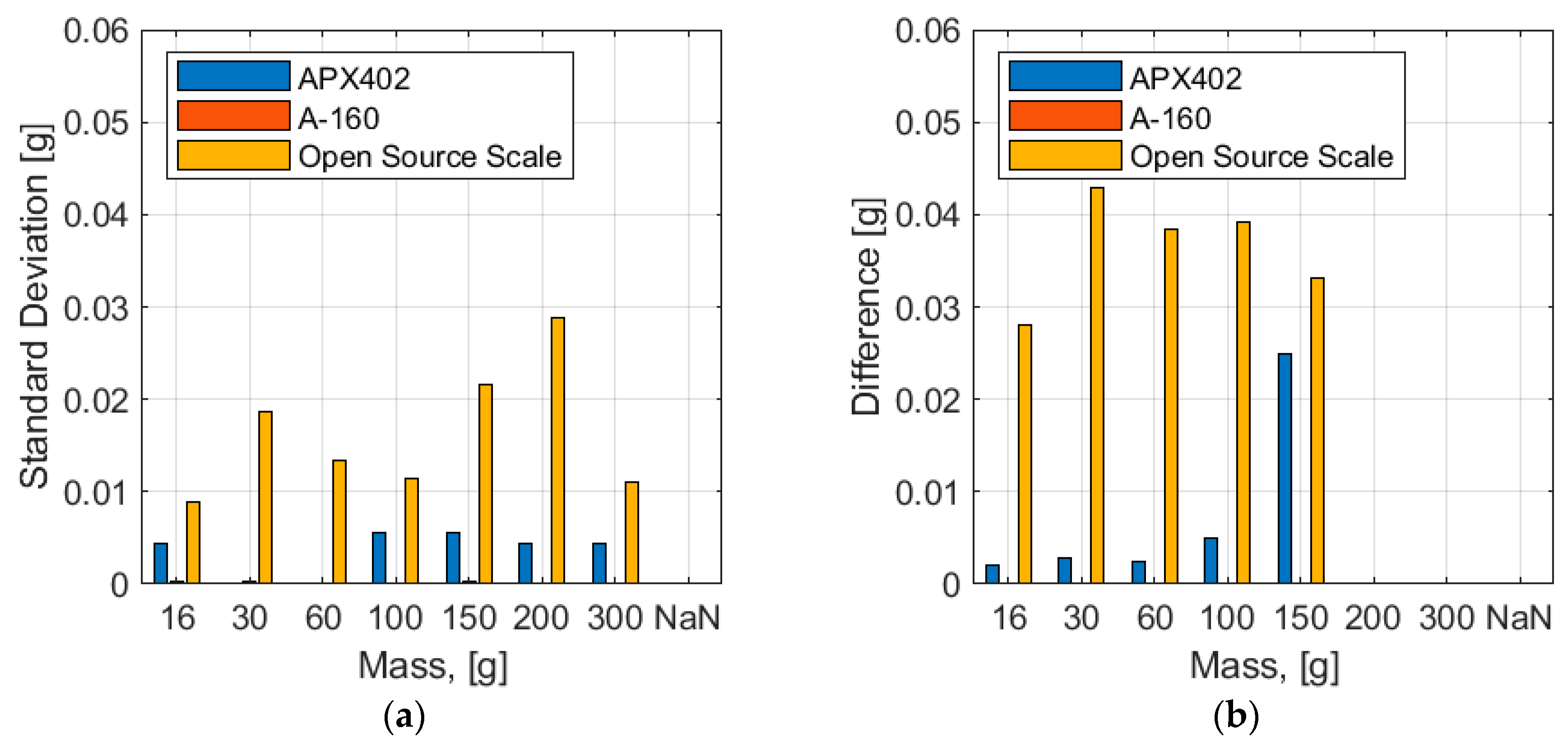
3.1. Laboratory-Grade Scale Comparison
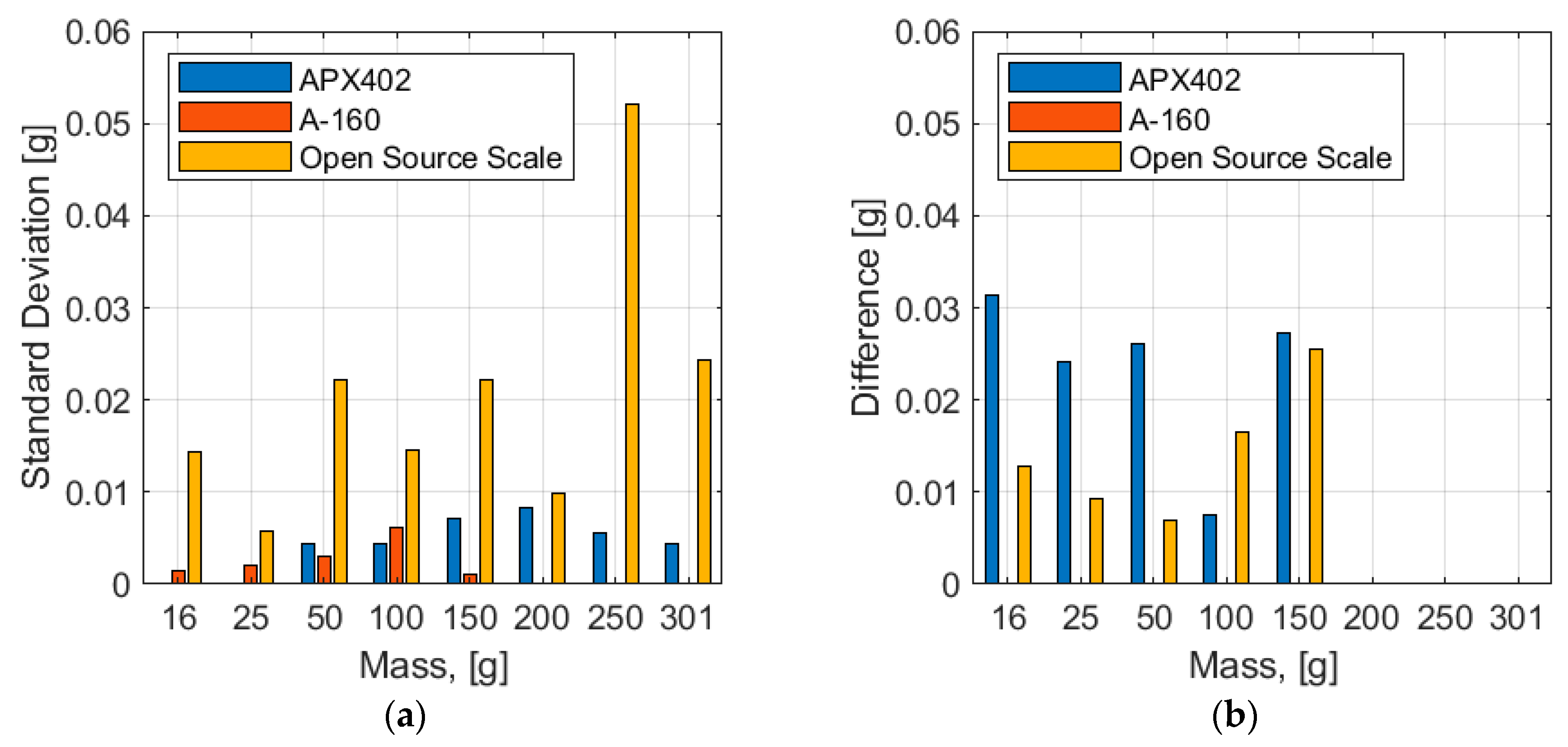
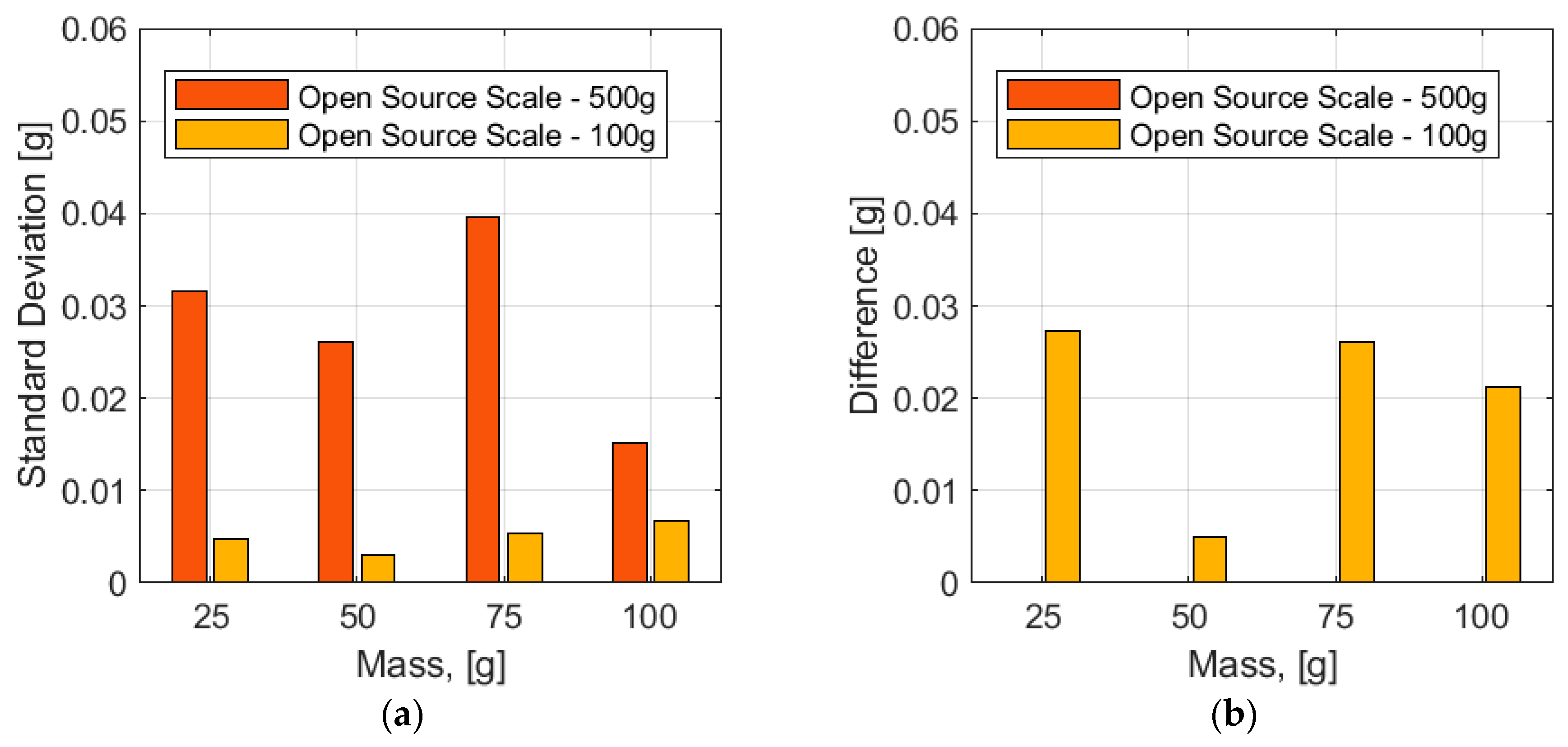
3.2. Standard Mass Measurements
3.3. Economic Analysis
4. Discussion
4.1. Open-Source Scale for Distributed Manufacturing
4.2. Future Technical Work
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fogel, K. Producing Open Source Software: How to Run a Successful Free Software Project; O’Reilly Media Inc.: Sebastopol, CA, USA, 2005; ISBN 978-0-596-55299-2. [Google Scholar]
- Webert, S. The Success of Open Source; Harvard University Press: Cambridge, MA, USA, 2004; ISBN 978-0-674-01292-9. [Google Scholar]
- Gibb, A. Building Open Source Hardware: DIY Manufacturing for Hackers and Makers; Pearson Education: London, UK, 2014. [Google Scholar]
- Ackerman, J.R. Toward open source hardware. U. Dayt. L. Rev. 2008, 34, 183–222. [Google Scholar]
- Pearce, J.M. Building research equipment with free, open-source hardware. Science 2012, 337, 1303–1304. [Google Scholar] [CrossRef]
- Pearce, J. Open-Source Lab: How to Build Your Own Hardware and Reduce Research Costs; Elsevier: New York, NY, USA, 2013. [Google Scholar]
- Da Costa, E.T.; Mora, M.F.; Willis, P.A.; Lago, C.L.; Jiao, H.; Garcia, C.D. Getting started with open-hardware: Development and control of microfluidic devices. Electrophoresis 2014, 35, 2370–2377. [Google Scholar] [CrossRef] [PubMed]
- Von Hippel, E. Democratizing innovation: The evolving phenomenon of user innovation. JFB 2005, 55, 63–78. [Google Scholar] [CrossRef]
- Powell, A. Democratizing production through open source knowledge: From open software to open hardware. Media Cult. Soc. 2012, 34, 691–708. [Google Scholar] [CrossRef]
- Blikstein, P. Digital fabrication and “making” in education: The democratization of invention. FabLabs Mach. Mak. Invent. 2013, 4, 1–21. [Google Scholar]
- Gershenfeld, N. Fab: The Coming Revolution on Your Desktop—From Personal Computers to Personal Fabrication; Basic Books: New York, NY, USA, 2008; ISBN 978-0-7867-2204-4. [Google Scholar]
- Wittbrodt, B.T.; Glover, A.G.; Laureto, J.; Anzalone, G.C.; Oppliger, D.; Irwin, J.L.; Pearce, J.M. Life-cycle economic analysis of distributed manufacturing with open-source 3-D printers. Mechatronics 2013, 23, 713–726. [Google Scholar] [CrossRef]
- King, D.L.; Babasola, A.; Rozario, J.; Pearce, J.M. Mobile Open-Source Solar-Powered 3-D Printers for Distributed Manufacturing in Off-Grid Communities. Chall. Sustain. 2014, 2, 18–27. [Google Scholar] [CrossRef]
- Wittbrodt, B.; Laureto, J.; Tymrak, B.; Pearce, J. Distributed manufacturing with 3-d printing: A case study of recreational vehicle solar photovoltaic mounting systems. J. Frugal Innov. 2015, 1, 1–7. [Google Scholar] [CrossRef]
- Sells, E.; Bailard, S.; Smith, Z.; Bowyer, A.; Olliver, V. RepRap: The replicating rapid prototyper-maximizing customizability by breeding the means of production. In Proceedings of the World Conference on Mass Customization and Personalization, Cambridge, MA, USA, 7–10 October 2007. [Google Scholar]
- Jones, R.; Haufe, P.; Sells, E.; Iravani, P.; Olliver, V.; Palmer, C.; Bowyer, A. RepRap-the replicating rapid prototyper. Robotica 2011, 29, 177–191. [Google Scholar] [CrossRef]
- Bowyer, A. 3D Printing and humanity’s first imperfect replicator. 3D Print. Addit. Manuf. 2014, 1, 4–5. [Google Scholar] [CrossRef]
- Kietzmann, J.; Pitt, L.; Berthon, P. Disruptions, decisions, and destinations: Enter the age of 3-D printing and additive manufacturing. Bus. Horiz. 2015, 58, 209–215. [Google Scholar] [CrossRef]
- Lipson, H.; Kurman, M. Fabricated: The New World of 3D Printing; John Wiley & Sons: Chichester, UK, 2013. [Google Scholar]
- Gwamuri, J.; Wittbrodt, B.; Anzalone, N.; Pearce, J. Reversing the trend of large scale and centralization in manufacturing: The case of distributed manufacturing of customizable 3-d-printable self-adjustable glasses. Chall. Sustain. 2014, 2, 30–40. [Google Scholar] [CrossRef]
- Attaran, M. The rise of 3-D printing: The advantages of additive manufacturing over traditional manufacturing. Bus. Horiz. 2017, 60, 677–688. [Google Scholar] [CrossRef]
- Tanikella, N.G.; Wittbrodt, B.; Pearce, J.M. Tensile strength of commercial polymer materials for fused filament fabrication 3D printing. Addit. Manuf. 2017, 15, 40–47. [Google Scholar] [CrossRef]
- Baden, T.; Chagas, A.M.; Gage, G.; Marzullo, T.; Prieto-Godino, L.L.; Euler, T. Open labware: 3-D printing your own lab equipment. PLoS Biol. 2015, 13, e1002086. [Google Scholar] [CrossRef] [PubMed]
- Coakley, M.; Hurt, D.E. 3D Printing in the laboratory: Maximize time and funds with customized and open-source labware. J. Lab. Autom. 2016, 21, 489–495. [Google Scholar] [CrossRef]
- Zhang, C.; Wijnen, B.; Pearce, J.M. Open-Source 3-D platform for low-cost scientific instrument ecosystem. J. Lab. Autom. 2016, 21, 517–525. [Google Scholar] [CrossRef]
- Dhankani, K.C.; Pearce, J.M. Open source laboratory sample rotator mixer and shaker. HardwareX 2017, 1, 1–12. [Google Scholar] [CrossRef]
- Trivedi, D.K.; Pearce, J.M. Open Source 3-D Printed Nutating Mixer. Appl. Sci. 2017, 7, 942. [Google Scholar] [CrossRef]
- Zhang, C.; Anzalone, N.C.; Faria, R.P.; Pearce, J.M. Open-Source 3D-Printable Optics Equipment. PLoS ONE 2013, 8, e59840. [Google Scholar] [CrossRef]
- Winters, B.J.; Shepler, D. 3D printable optomechanical cage system with enclosure. HardwareX 2018, 3, 62–81. [Google Scholar] [CrossRef]
- Agcayazi, T.; Foster, M.; Kausche, H.; Gordon, M.; Bozkurt, A. Multi-axis stress sensor characterization and testing platform. HardwareX 2019, 5, e00048. [Google Scholar] [CrossRef]
- Delmans, M.; Haseloff, J. µCube: A Framework for 3D Printable Optomechanics; Ubiquity Press: London, UK, 2018. [Google Scholar]
- Sharkey, J.P.; Foo, D.C.W.; Kabla, A.; Baumberg, J.J.; Bowman, R.W. A one-piece 3D printed flexure translation stage for open-source microscopy. Rev. Sci. Instrum. 2016, 87, 025104. [Google Scholar] [CrossRef]
- Collins, J.T.; Knapper, J.; Stirling, J.; Mduda, J.; Mkindi, C.; Mayagaya, V.; Mwakajinga, G.A.; Nyakyi, P.T.; Sanga, V.L.; Carbery, D.; et al. Robotic microscopy for everyone: The OpenFlexure Microscope. bioRxiv 2019, 11, 2447–2460. [Google Scholar] [CrossRef]
- Grant, S.D.; Cairns, G.S.; Wistuba, J.; Patton, B.R. Adapting the 3D-printed Openflexure microscope enables computational super-resolution imaging. F1000Res 2019, 8. [Google Scholar] [CrossRef]
- Anzalone, G.C.; Glover, A.G.; Pearce, J.M. Open-Source Colorimeter. Sensors 2013, 13, 5338–5346. [Google Scholar] [CrossRef]
- Kelley, C.D.; Krolick, A.; Brunner, L.; Burklund, A.; Kahn, D.; Ball, W.P.; Weber-Shirk, M. An Affordable Open-Source Turbidimeter. Sensors 2014, 14, 7142–7155. [Google Scholar] [CrossRef]
- Wijnen, B.; Anzalone, G.C.; Pearce, J.M. Open-source mobile water quality testing platform. J. Water Sanit. Hyg. Dev. 2014, 4, 532–537. [Google Scholar] [CrossRef]
- Wittbrodt, B.T.; Squires, D.A.; Walbeck, J.; Campbell, E.; Campbell, W.H.; Pearce, J.M. Open-Source Photometric System for Enzymatic Nitrate Quantification. PLoS ONE 2015, 10, e0134989. [Google Scholar] [CrossRef]
- Wijnen, B.; Hunt, E.J.; Anzalone, G.C.; Pearce, J.M. Open-Source Syringe Pump Library. PLoS ONE 2014, 9, e107216. [Google Scholar] [CrossRef]
- Bravo-Martinez, J. Open source 3D-printed 1000 μL micropump. HardwareX 2018, 3, 110–116. [Google Scholar] [CrossRef]
- Pusch, K.; Hinton, T.J.; Feinberg, A.W. Large volume syringe pump extruder for desktop 3D printers. HardwareX 2018, 3, 49–61. [Google Scholar] [CrossRef]
- Garcia, V.E.; Liu, J.; DeRisi, J.L. Low-cost touchscreen driven programmable dual syringe pump for life science applications. HardwareX 2018, 4, e00027. [Google Scholar] [CrossRef]
- Klar, V.; Pearce, J.M.; Kärki, P.; Kuosmanen, P. Ystruder: Open source multifunction extruder with sensing and monitoring capabilities. HardwareX 2019, 6, e00080. [Google Scholar] [CrossRef]
- Pearce, J.M.; Anzalone, N.C.; Heldt, C.L. Open-Source Wax RepRap 3-D Printer for Rapid Prototyping Paper-Based Microfluidics. J. Lab. Autom. 2016, 21, 510–516. [Google Scholar] [CrossRef]
- Lake, J.R.; Heyde, K.C.; Ruder, W.C. Low-cost feedback-controlled syringe pressure pumps for microfluidics applications. PLoS ONE 2017, 12. [Google Scholar] [CrossRef]
- Kong, D.S.; Thorsen, T.A.; Babb, J.; Wick, S.T.; Gam, J.J.; Weiss, R.; Carr, P.A. Open-source, community-driven microfluidics with Metafluidics. Nat. Biotechnol. 2017, 35, 523–529. [Google Scholar] [CrossRef]
- Niezen, G.; Eslambolchilar, P.; Thimbleby, H. Open-source hardware for medical devices. BMJ Innov. 2016, 2, 78–83. [Google Scholar] [CrossRef]
- Daniel, K.F.; Peter J, G. Open-Source Hardware Is a Low-Cost Alternative for Scientific Instrumentation and Research. Mod. Instrum. 2012, 2012. [Google Scholar] [CrossRef]
- Pearce, J.M. Laboratory equipment: Cut costs with open-source hardware. Nature 2014, 505. [Google Scholar] [CrossRef] [PubMed]
- Pearce, J.M. Impacts of Open Source Hardware in Science and Engineering. Bridge 2017, 47, 24–31. [Google Scholar]
- Pearce, J. Quantifying the Value of Open Source Hardware Development. Mod. Econ. 2015, 6, 1–11. [Google Scholar] [CrossRef]
- Pearce, J.M. Return on investment for open source scientific hardware development. Sci. Public Policy 2016, 43, 192–195. [Google Scholar] [CrossRef]
- Hietanen, I.; Heikkinen, I.T.S.; Savin, H.; Pearce, J.M. Approaches to open source 3-D printable probe positioners and micromanipulators for probe stations. HardwareX 2018, 4, e00042. [Google Scholar] [CrossRef]
- Dryden, M.D.M.; Fobel, R.; Fobel, C.; Wheeler, A.R. Upon the Shoulders of Giants: Open-Source Hardware and Software in Analytical Chemistry. Anal. Chem. 2017, 89, 4330–4338. [Google Scholar] [CrossRef] [PubMed]
- Quartz Crystal Microbalance with Dissipation Monitoring: The First Scientific QCM Entirely Open Source. Available online: https://openqcm.com/ (accessed on 7 April 2020).
- Politi, J.; Dardano, P.; Caliò, A.; Iodice, M.; Rea, I.; De Stefano, L. Reversible sensing of heavy metal ions using lysine modified oligopeptides on porous silicon and gold. Sens. Actuators B Chem. 2017, 244, 142–150. [Google Scholar] [CrossRef]
- Frijns, E.; Verstraelen, S.; Stoehr, L.C.; Van Laer, J.; Jacobs, A.; Peters, J.; Tirez, K.; Boyles, M.S.P.; Geppert, M.; Madl, P.; et al. A Novel Exposure System Termed NAVETTA for In Vitro Laminar Flow Electrodeposition of Nanoaerosol and Evaluation of Immune Effects in Human Lung Reporter Cells. Environ. Sci. Technol. 2017, 51, 5259–5269. [Google Scholar] [CrossRef]
- Ventura, B.D.; Iannaccone, M.; Funari, R.; Ciamarra, M.P.; Altucci, C.; Capparelli, R.; Roperto, S.; Velotta, R. Effective antibodies immobilization and functionalized nanoparticles in a quartz-crystal microbalance-based immunosensor for the detection of parathion. PLoS ONE 2017, 12, e0171754. [Google Scholar] [CrossRef]
- Fries, M.D.F. The Opera Instrument: An Advanced Curation Development for Mars Sample Return Organic Contamination Monitoring; NASA: Woodlands, TX, USA, 2018.
- Muckley, E.S.; Naguib, M.; Ivanov, I.N. Multi-modal, ultrasensitive, wide-range humidity sensing with Ti3C2 film. Nanoscale 2018, 10, 21689–21695. [Google Scholar] [CrossRef]
- Scale Manufacturers Association Load Cell Application and Test Guideline. Available online: http://www.scalemanufacturers.org/pdf/loadcellapplicationtestguidelineapril2010.pdf (accessed on 13 April 2020).
- Xiamen Ocular 1602 LCD Data Sheet. Available online: https://www.sparkfun.com/datasheets/LCD/GDM1602K.pdf (accessed on 30 March 2020).
- AVIA Semiconductor HX711 Data Sheet. Available online: https://cdn.sparkfun.com/datasheets/Sensors/ForceFlex/hx711_english.pdf (accessed on 30 March 2020).
- Arduino Arduino—Board. Available online: https://www.arduino.cc/en/reference/board (accessed on 30 March 2020).
- Scale Manufacturers Association SMA SCP-0499 Scale Serial Communication Protocol 1999. Available online: http://www.scalemanufacturers.org/PDF/ScaleCommProtocol5199M1.pdf (accessed on 13 April 2020).
- Arduino Nano. Available online: https://store.arduino.cc/usa/arduino-nano (accessed on 6 April 2020).
- Geekcreit Nano V3 Module with USB Cable. Available online: https://www.banggood.com/ATmega328P-Nano-V3-Module-Improved-Version-With-USB-Cable-Development-Board-p-933647.html (accessed on 6 April 2020).
- AmazonBasics USB A-miniB. Available online: https://www.amazon.com/AmazonBasics-USB-2-0-Cable-Male/dp/B00NH13S44 (accessed on 6 April 2020).
- Amazon 5V USB Wall Charger. Available online: https://www.amazon.com/Certified-Charger-FONKEN-universal-Compatible/dp/B07DCR29GN/ref=sr_1_3?crid=2T9NB566GJAS4&dchild=1&keywords=5v+usb+power+supply&qid=1586183620&s=electronics&sprefix=5v+usb+p%2Celectronics%2C213&sr=1-3 (accessed on 6 April 2020).
- Amazon HX711 and TAL220. Available online: https://www.amazon.com/KNACRO-Converter-Breakout-Portable-Electronic/dp/B078W2VCP2/ref=sr_1_1?dchild=1&keywords=tal220&qid=1586183945&sr=8-1&th=1 (accessed on 6 April 2020).
- Industries, Adafruit. Tactile Button Switch (6mm) × 20 Pack. Available online: https://www.adafruit.com/product/367 (accessed on 6 April 2020).
- Industries, Adafruit. Adafruit Full Sized Breadboard. Available online: https://www.adafruit.com/product/239 (accessed on 6 April 2020).
- Banggood 40pcs Double Side Prototype PCB. Available online: https://www.banggood.com/Geekcreit-40pcs-FR-4-2_54mm-Double-Side-Prototype-PCB-Printed-Circuit-Board-p-995732.html (accessed on 6 April 2020).
- Arducam 1602 16 × 2 LCD Display Module. Available online: https://www.amazon.com/Arducam-Display-Controller-Character-Backlight/dp/B019D9TYMI (accessed on 6 April 2020).
- Potentiometers|Mouser. Available online: https://www.mouser.com/Passive-Components/Potentiometers-Trimmers-Rheostats/Potentiometers/_/N-9q0yp?Ns=Pricing|0 (accessed on 14 April 2020).
- Resistor Kit—1/4W (500 total) —COM-10969—SparkFun Electronics. Available online: https://www.sparkfun.com/products/10969 (accessed on 6 April 2020).
- Headers, Adafruit. Available online: https://www.adafruit.com/category/154 (accessed on 6 April 2020).
- HTC-Sensor TAL220 Data Sheet. Available online: https://cdn.sparkfun.com/datasheets/Sensors/ForceFlex/TAL220M4M5Update.pdf (accessed on 4 April 2020).
- HTC-Sensor TAL221 Data Sheet. Available online: https://cdn.sparkfun.com/assets/9/9/a/f/3/TAL221.pdf (accessed on 4 April 2020).
- Mini Load Cell—100 g, Straight Bar (TAL221), SparkFun Electronics. Available online: https://www.sparkfun.com/products/14727 (accessed on 6 April 2020).
- Open Source Laboratory Logging Digital Scale. Available online: https://osf.io/me9a8/ (accessed on 6 April 2020). [CrossRef]
- GNU General Public License Version 3. Available online: https://www.gnu.org/licenses/gpl-3.0.en.html (accessed on 29 March 2019).
- Cura LulzBot Edition. Available online: https://www.lulzbot.com/cura (accessed on 2 April 2019).
- LulzBot LulzBot TAZ 6. Available online: https://www.lulzbot.com/store/printers/lulzbot-taz-6 (accessed on 20 April 2020).
- Fritzing. Available online: http://fritzing.org/ (accessed on 28 March 2020).
- Arduino HelloWorld. Available online: https://www.arduino.cc/en/Tutorial/HelloWorld (accessed on 28 March 2020).
- SparkFun Basic Character LCD Hookup Guide—learn.sparkfun.com. Available online: https://learn.sparkfun.com/tutorials/basic-character-lcd-hookup-guide (accessed on 30 March 2020).
- Bogde HX711. Available online: https://github.com/bogde/HX711 (accessed on 13 April 2020).
- Hans-Christoph Steiner LiquidCrystal; Arduino Libraries. Available online: https://github.com/arduino-libraries/LiquidCrystal (accessed on 13 April 2020).
- Denver Instruments APX-402 Operators Manual. Available online: http://www.denverinstrument.com/denverusa/media/pdf/archive_manuals/Op-Man-Apex-RevC.pdf (accessed on 16 April 2019).
- Denver Instruments A-160 Operators Manual. Available online: http://www.denverinstrument.com/denverusa/media/pdf/archive_manuals/OpMan_A-Series.pdf (accessed on 16 April 2019).
- Sule, S.S.; Petsiuk, A.L.; Pearce, J.M. Open Source Completely 3-D Printable Centrifuge. Instruments 2019, 3, 30. [Google Scholar] [CrossRef]
- EIA. Electric Power Monthly. Available online: https://www.eia.gov/electricity/monthly/epm_table_grapher.php?t=epmt_5_6_a (accessed on 16 April 2019).
- White MH Build Series PLA Filament—2.85mm (1kg). Available online: https://www.matterhackers.com/store/3d-printer-filament/300mm-pla-filament-white-1-kg (accessed on 20 April 2020).
- eBay Denver APX 402 Scale for Sale Online. Available online: https://www.ebay.com/c/669060320 (accessed on 14 April 2020).
- eBay Denver A-160 Digital Scale for Sale Online. Available online: https://www.ebay.com/itm/Denver-Instruments-Company-Digital-Scale-A-160-/161055820362 (accessed on 14 April 2020).
- AMIR Digital Kitchen Scale, 500 g–0.01 g. Available online: https://www.amazon.com/AMIR-Upgraded-500g-0-01g-Stainless-Batteries/dp/B01HCKQG7G (accessed on 22 April 2020).
- Lab Analytical Balance Scale, 500 g × 0.01 g High Precision Electronic Scientific Scale Peeling Weight Digital Kitchen Precision Balance Jewelry Gold Scale with 200 g Weight Self-Correcting Function (US): Industrial & Scientific. Available online: https://www.amazon.com/Analytical-500gx0-01g-Electronic-Scientific-Self-Correcting/dp/B08591CKQT/ (accessed on 23 April 2020).
- Mein LAY Lab Analytical Electronic Balance Scale Laboratory Balance Digital Kitchen Balance Scale Jewelry Gold Scale Precision Balance (0.01/2000 g): Home & Kitchen. Available online: https://www.amazon.com/Mein-LAY-Analytical-Electronic-Laboratory/dp/B07VRCSFBY/ (accessed on 23 April 2020).
- U.S. SOLID 0.001 g 1 mg Analytical Digital Lab Precision Balance Scale 300 g. Available online: https://www.amazon.com/U-S-Analytical-Digital-Precision-Balance/dp/B017ADAA7C/ (accessed on 23 April 2020).
- U.S. Solid 0.001 g 1 mg Digital Analytical Balance w/RS232 Interface. Available online: https://www.amazon.com/U-S-Solid-Analytical-Laboratories-Calibration/dp/B07Y2SXMTC (accessed on 22 April 2020).
- U.S. Solid Precision Lab Scale 1000 g × 0.01 g-High Precision Analytical Balance w/RS232 Interface, Detachable Draft Shield, Calibration Weight, 100-240 VAC. Available online: https://www.amazon.com/U-S-Solid-Precision-Analytical-Detachable/dp/B07YL1B146/?th=1 (accessed on 23 April 2020).
- CGOLDENWALL 5000 g 5 kg 0.01 g Lab Analytical Balance RS232. Available online: https://www.amazon.com/Analytical-Precision-Electronic-Calibration-Commercial/dp/B07DCM3CFC (accessed on 22 April 2020).
- Ross, A.R.; Lewin, K.M. Science Kits in Developing Countries: An Appraisal of Potential; UNESCO: London, UK, 1992; pp. 1–120. [Google Scholar]
- Gwamuri, J.; Pearce, J.M. Open source 3D printers: An appropriate technology for building low cost optics labs for the developing communities. In Proceedings of the 14th Conference on Education and Training in Optics and Photonics: ETOP 2017, Hangzhou, China, 29–31 May 2017; Volume 10452, p. 104522S. [Google Scholar]
- De Maria, C.; Di Pietro, L.; Ravizza, A.; Lantada, A.D.; Ahluwalia, A.D. Chapter 2—Open-source medical devices: Healthcare solutions for low-, middle-, and high-resource settings. In Clinical Engineering Handbook, 2nd ed.; Iadanza, E., Ed.; Academic Press: Cambridge, MA, USA, 2020; pp. 7–14. ISBN 978-0-12-813467-2. [Google Scholar]
- Pearce, J. Distributed Manufacturing of Open-Source Medical Hardware for Pandemics. Preprints 2020, 4, 49. [Google Scholar] [CrossRef]
- Sebastian, C.; di Donato, V.; CNN. In the Race to Secure Medical Supplies, Countries Ban or Restrict Exports. Available online: https://www.cnn.com/2020/03/27/business/medical-supplies-export-ban/index.html (accessed on 15 April 2020).
- Pearce, J.M. Undermined by overhead accounting. Science 2016, 352, 158–159. [Google Scholar] [CrossRef] [PubMed]
- SparkFun OpenScale Applications and Hookup Guide—SparkFun. Available online: https://learn.sparkfun.com/tutorials/openscale-applications-and-hookup-guide#calibration-suggestions (accessed on 16 March 2020).
- SparkFun OpenLog—DEV-13712. Available online: https://www.sparkfun.com/products/13712 (accessed on 14 April 2020).
- GMM Technoworld 50 kg/1 g 2 kg/0.05 g Digital Counting Scale with Dual Platter & PC Connection. Available online: https://testmeter.sg/webshaper/store/viewprod.asp?pkproductitem=432&pkproduct= (accessed on 22 April 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Photograph | |
|---|---|---|
| 3-D Printed Components | ||
| Base Print in normal orientation. Can be printed without supports. |  | |
| Cover Print in either orientation. Can be printed without support, but this sacrifices top finish. |  |  |
| Bed Print in either orientation. Can be printed without support, but this sacrifices top finish. |  |  |
| Cover (Optional) Print upside-down without supports. This is used to reduce air currents for higher accuracy and precision. |  |  |
| Electronic Components | ||
| Arduino Microcontroller (Nano) $20.70 [66] (Derivative available with cable for $5.72 [67]) |  | |
| USB-A to mini-B USB (or micro, or USB-B, depending on the specific Arduino in use) $5.26 [68] |  | |
| 5V USB Power Block (Optional) $4.00 [69] |  | |
| HX711 Load cell Amplifier $8.50 with TAL220 [70] |  | |
| Push-Button (Normally Open, Momentary) $2.50 for 20 pack [71] |  | |
| Jumper Wires |  | |
| Breadboard: Option 1: Solderless Breadboard (remains external to scale) $5.95 [72] Option 2: Solder Breadboard (40 × 60 mm), Solder, Soldering Iron $5.99 in 40-pack [73] |  | |
| LCD is optional. The three components below are required if using an LCD. | ||
| 16 × 2 LCD Display $5.99 [74] |  | |
| 10 kΩ Potentiometer $0.25 [75] |  | |
| 220 Ω Resistor $7.95 in 500 pack [76] |  | |
| If using a solderless breadboard, no more electronic components needed. Using a solder breadboard: | ||
| Female Header Pins: 1 × 4 (2) 1 × 8 (1) 1 × 9 (1) $0.95 [77] |  | |
| Male Header Pins: 1 × 12 (1) 1 × 4 (1) $3.00 for 5 × 16 [77] |  | |
| Configuration Specific Hardware | ||
| TAL 220 Load cell configuration | ||
| TAL 220 Load cell (Available in 3, 5, 10, 20, 25, 30, 50, 80, 100, 120, 200 kg ranges [78]) Wires terminated in Female 4-pin molex connector with color order: (Red-Black-White-Green) $0.00 with HX711 [70] |  | |
| Fasteners: M4 × 25 mm cap screw (2)—3 mm Allen Key M5 × 25 mm cap screw (2)—4 mm Allen Key <$2.00 from a hardware store |  | |
| TAL 221 Load cell configuration | ||
| TAL 221 Load cell (Available in 100, 150, 200, 300, 500, 750, 1000, and 1500 g ranges [79]) Wires terminated in Female 4-pin molex connector with color order: (Red-Black-White-Green) $8.95 [80] |  | |
| Fasteners: M3 × 20 mm cap screw (4)—2.5 mm Allen Key M3 nut (2)—5.5 mm Socket <$2.00 from a hardware store |  | |
| Property | PLA | PETG |
|---|---|---|
| Layer Height | 0.14 mm | 0.18 mm |
| Wall Thickness | 2 mm | 1 mm |
| Top/Bottom Thickness | 2 mm | 1 mm |
| Infill | Cubic, 20% | N/A |
| Support Material | Zigzag, Touching Bedplate Only, 30%, 50 degrees | N/A |
| Bed Adhesion | Skirt | Skirt |
| Nozzle Temperature | 205 °C | 230 °C |
| Print Speed | Infill: 40 mm/s, Wall: 30 mm/s, Support: 60 mm/s | Wall: 20 mm/s |
| Style/Range | σ | %FS |
|---|---|---|
| TAL220/5000 g | 0.0163 | 0.0004% |
| TAL221/500 g | 0.0207 | 0.0041% |
| TAL221/100 g | 0.0050 | 0.0050% |
| Style/Range | σ | %FS |
|---|---|---|
| TAL220/5000 g | 0.0365 | 0.0007% |
| TAL221/500 g | 0.0071 | 0.0014% |
| TAL221/100 g | 0.0026 | 0.0026% |
| Configuration | Total Investment | Cost Corrected for Bulk Purchases |
|---|---|---|
| No LCD | $51.36/$31.12 1 | $40.75/$20.51 |
| LCD | $65.55/$45.31 | $47.01/$26.77 |
| Range/Repeatability | Serial Capability | Retail Cost | Percent Savings of Open-Source Scale ($47.01) |
|---|---|---|---|
| 500 g/0.01 g [97] | No | $15 | NA |
| 500 g/0.1 g [98] | No | $88 | −47% |
| 5000 g/0.1 g [99] | No | $55 | −15% |
| 300 g/0.001 g [100] | Yes | $253 | −81% |
| 500 g/0.002 g [101] | Yes | $115 | −59% |
| 600 g/0.01 g [102] | Yes | $110 | −57% |
| 5000 g/0.08 g [103] | Yes | $289 | −83% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hubbard, B.R.; Pearce, J.M. Open-Source Digitally Replicable Lab-Grade Scales. Instruments 2020, 4, 18. https://doi.org/10.3390/instruments4030018
Hubbard BR, Pearce JM. Open-Source Digitally Replicable Lab-Grade Scales. Instruments. 2020; 4(3):18. https://doi.org/10.3390/instruments4030018
Chicago/Turabian StyleHubbard, Benjamin R., and Joshua M. Pearce. 2020. "Open-Source Digitally Replicable Lab-Grade Scales" Instruments 4, no. 3: 18. https://doi.org/10.3390/instruments4030018
APA StyleHubbard, B. R., & Pearce, J. M. (2020). Open-Source Digitally Replicable Lab-Grade Scales. Instruments, 4(3), 18. https://doi.org/10.3390/instruments4030018