Development of the LHCb VELO Detector Modules into a Standalone, Non-Invasive Online Beam Monitor for Medical Accelerators

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
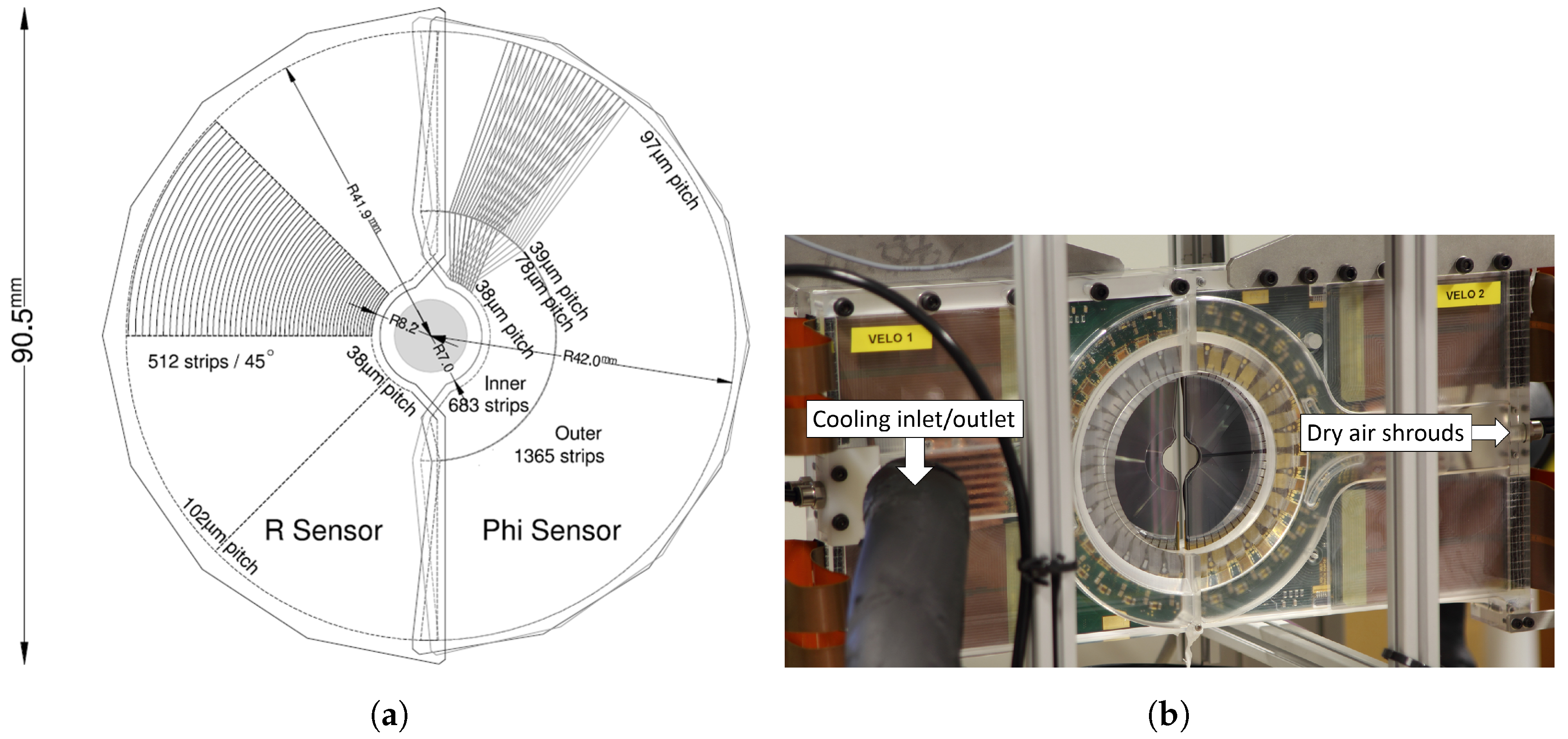
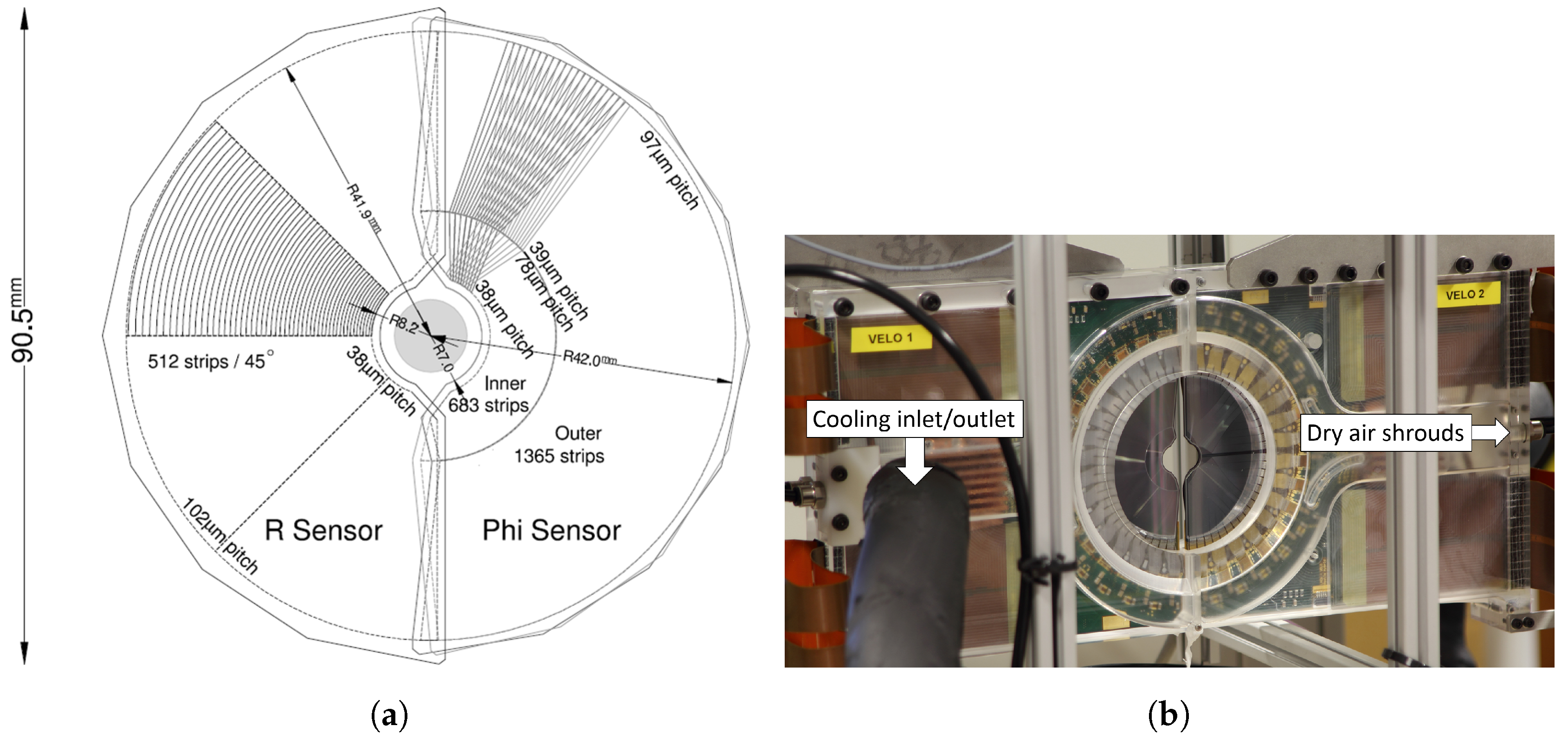
2.1. LHCb VELO Technology
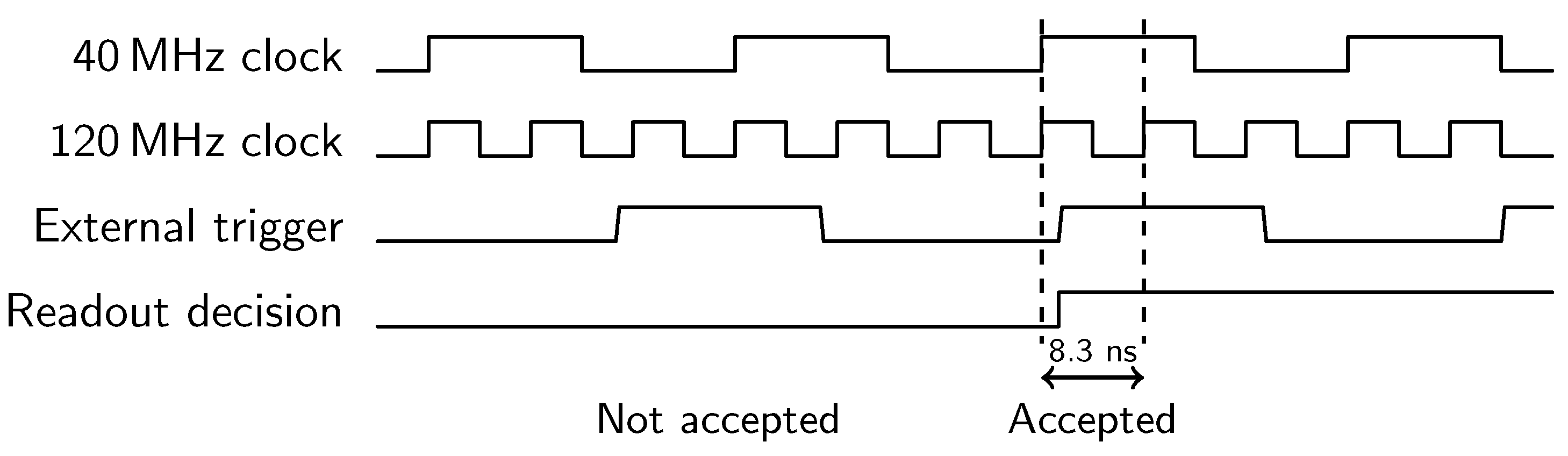
2.2. Trigger and Timing Control for the LHCb VELO Modules
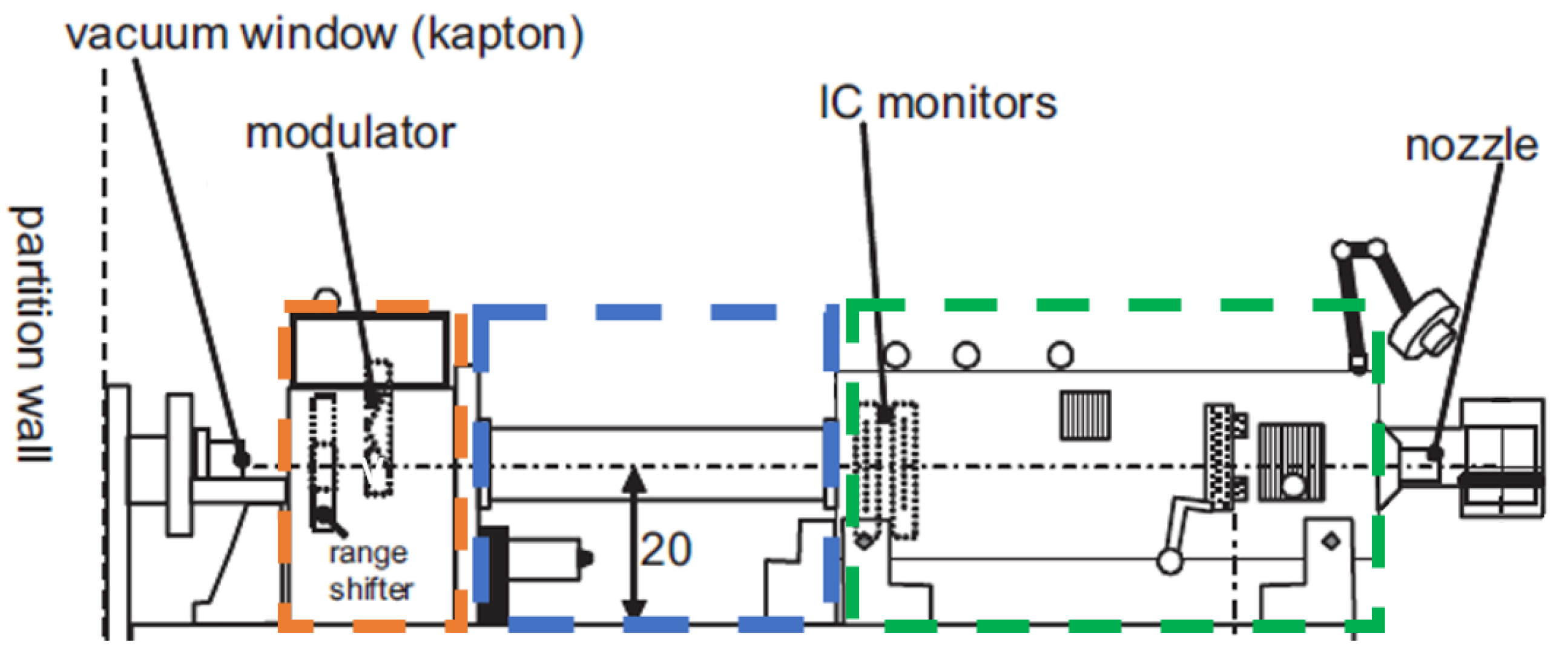
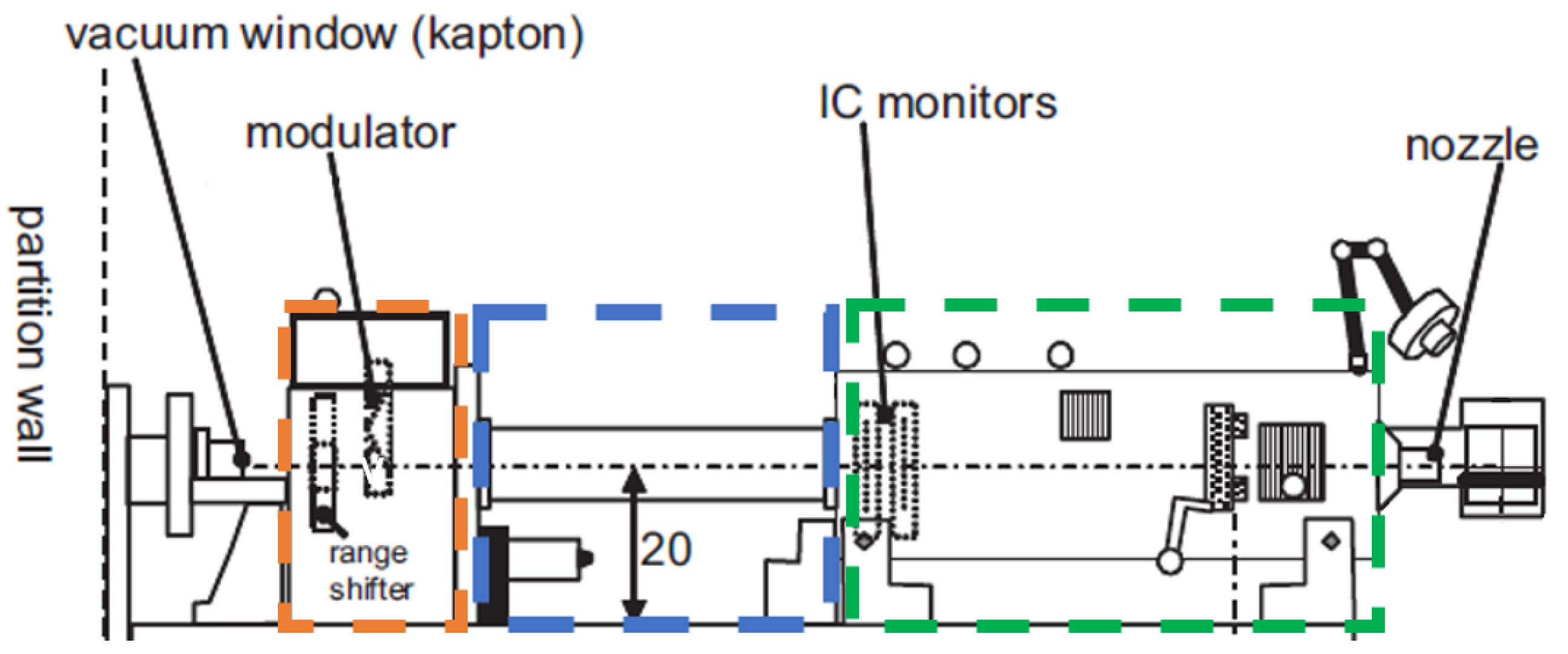
2.3. Requirements for the VELO Modules in a Clinical Proton Beamline
- Operation of the detector in ambient air for temperatures of the sensors below 0 °C to prevent degradation of the silicon sensor and suppress noise.
- Positioning of the detector in the beam propagation direction z and its transverse plane x with an accuracy of 1 mm.
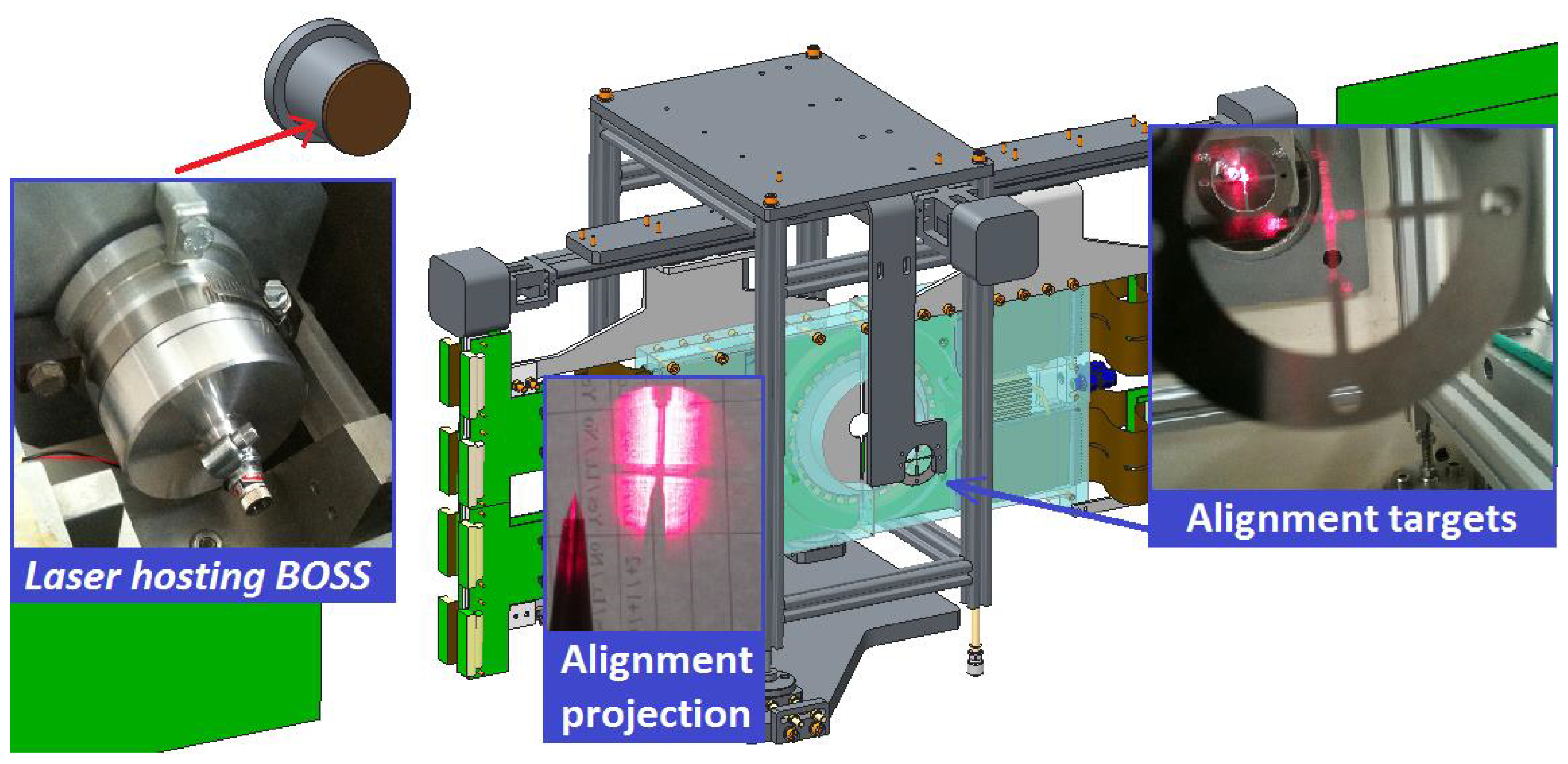
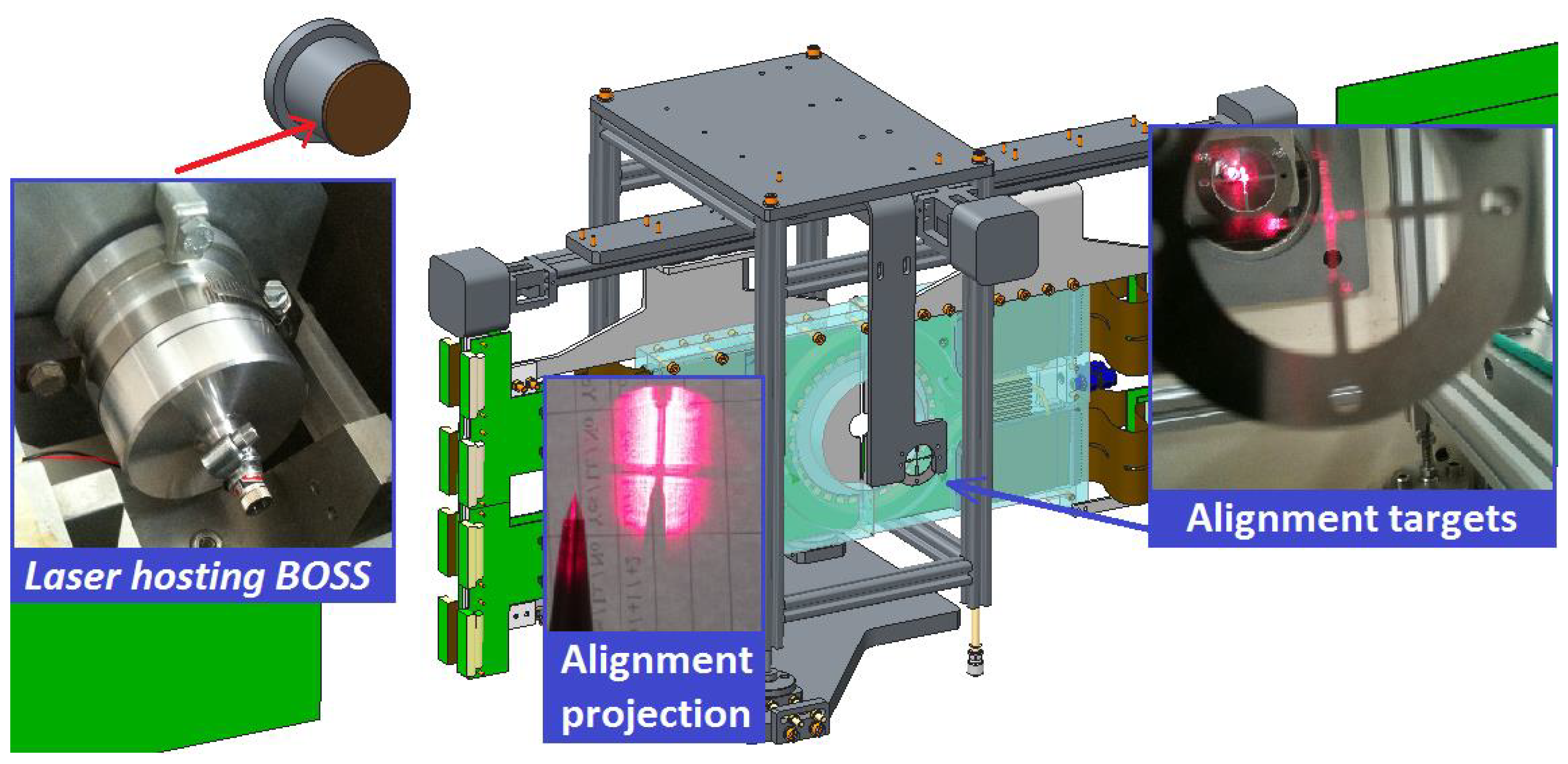
- Alignment of the VELO module co-centrically with the beam z-axis with an accuracy of 1 mm.
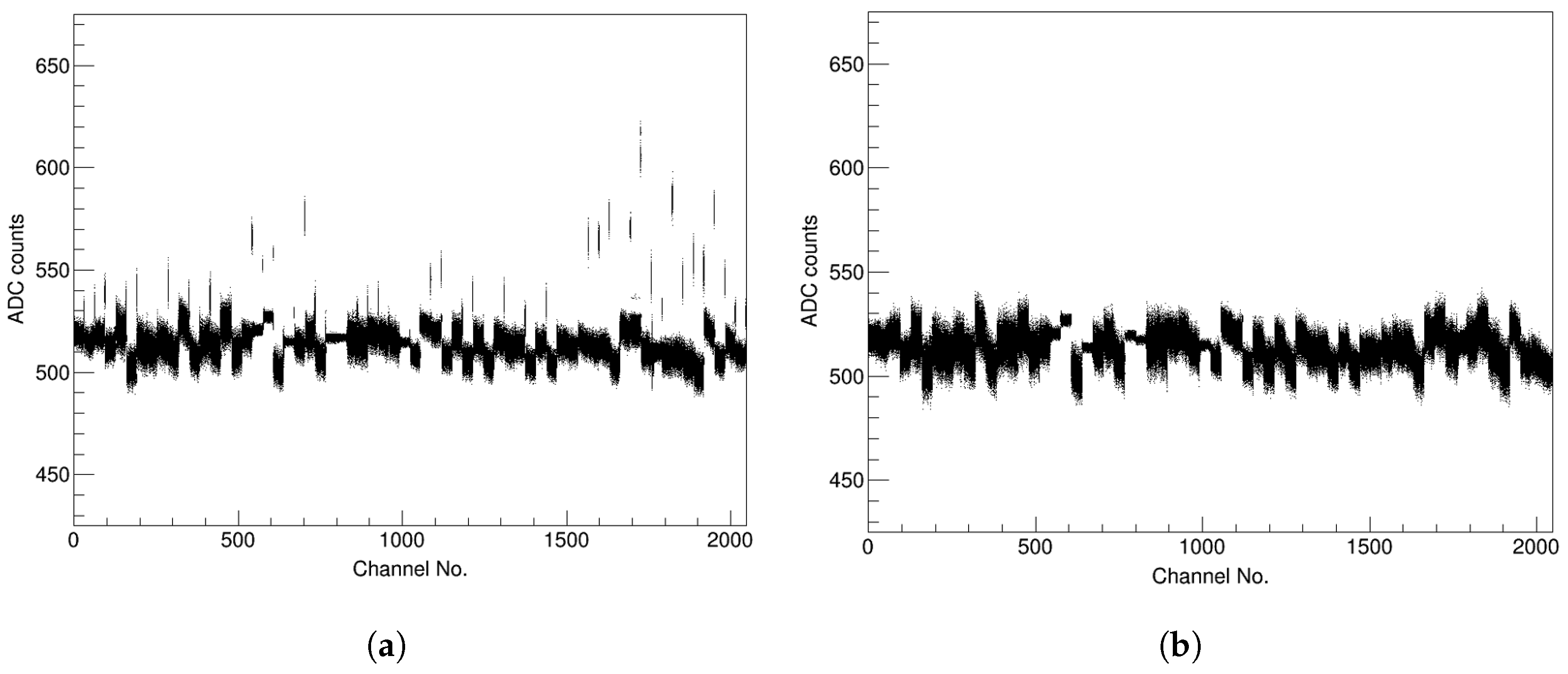
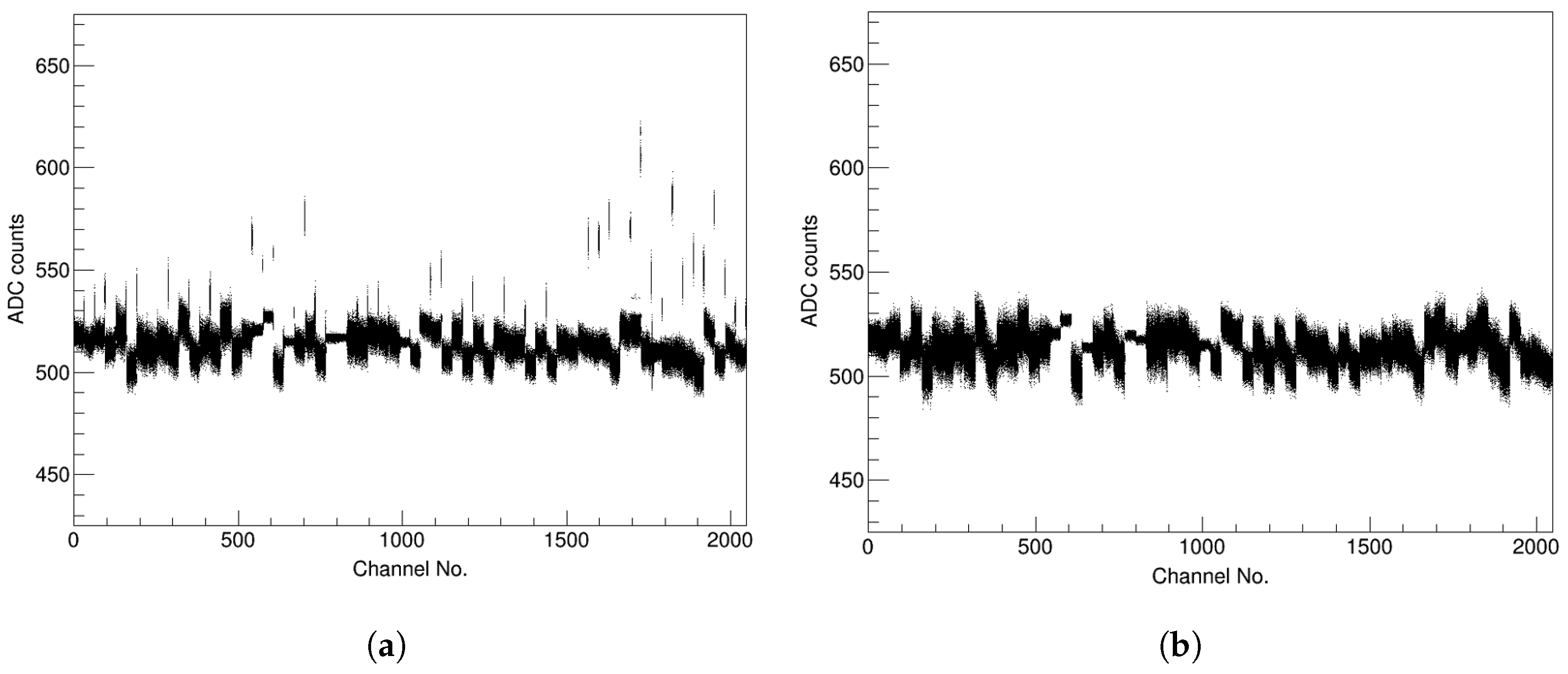
- Configuration of a new set of delay parameters in clock cycles for correct data sampling of the VELO modules due to hardware and cable changes in the new environment.
- Matching the readout of the VELO module with the proton bunch arrival given by the RF frequency of the CCC cyclotron of 25.7 MHz to sample at positive points of the output pulse.
- Conceptualisation of a synchronised readout of the VELO modules with a Faraday Cup.
3. Results
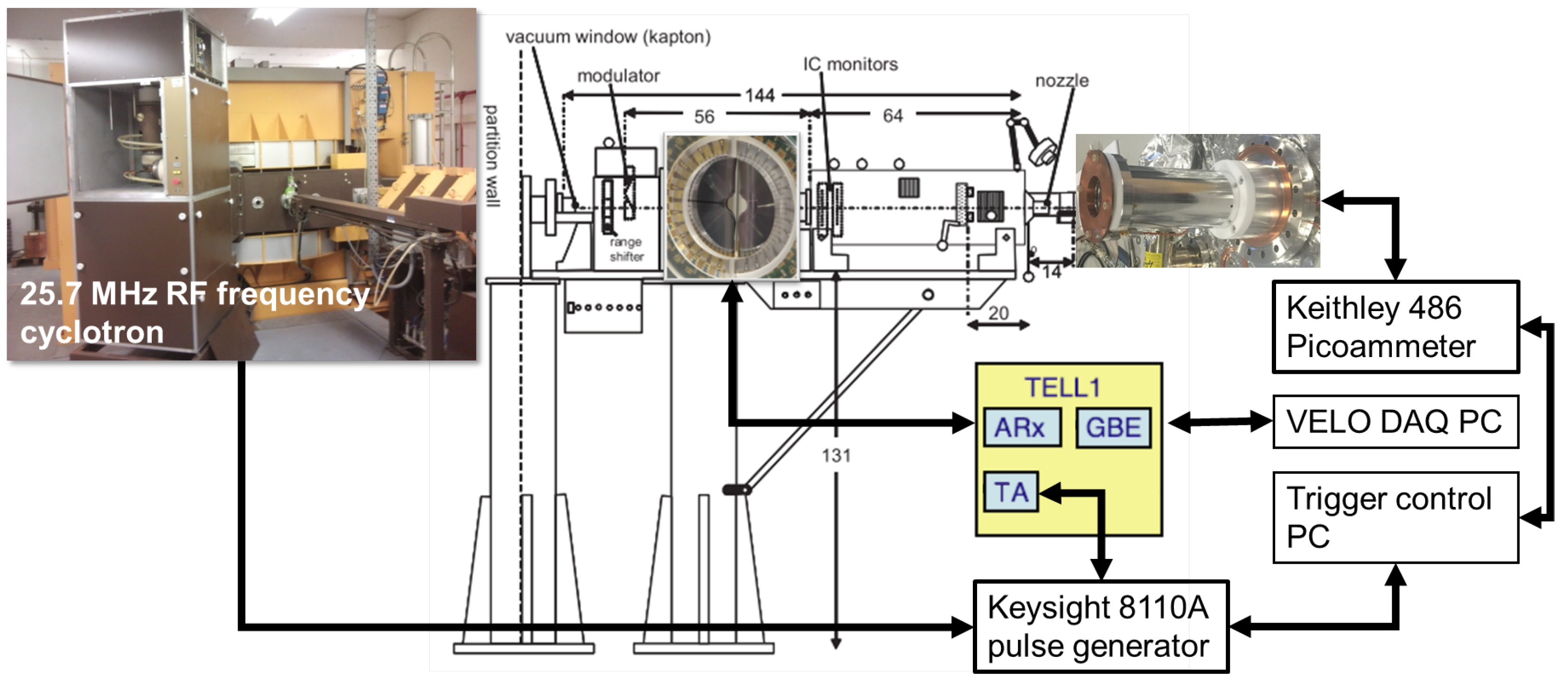
3.1. Adaptations for a Clinical Environment
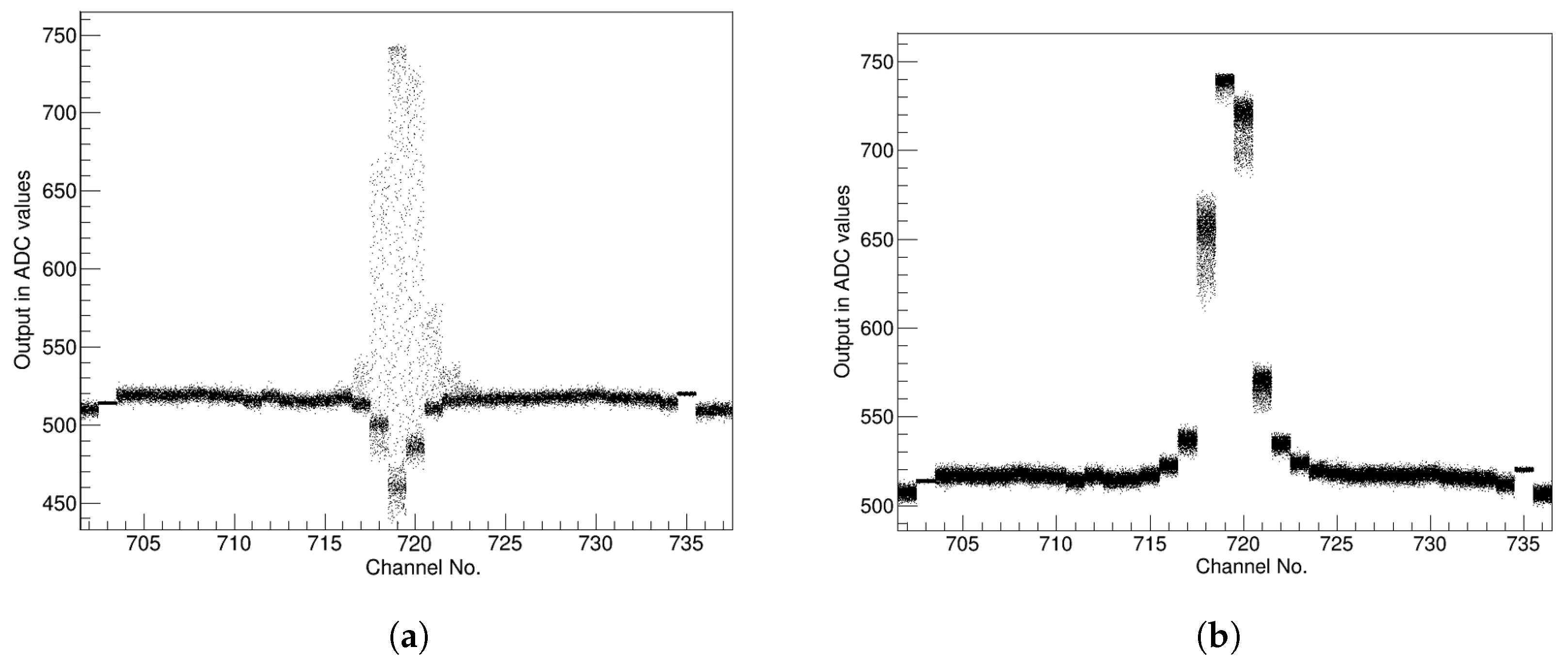
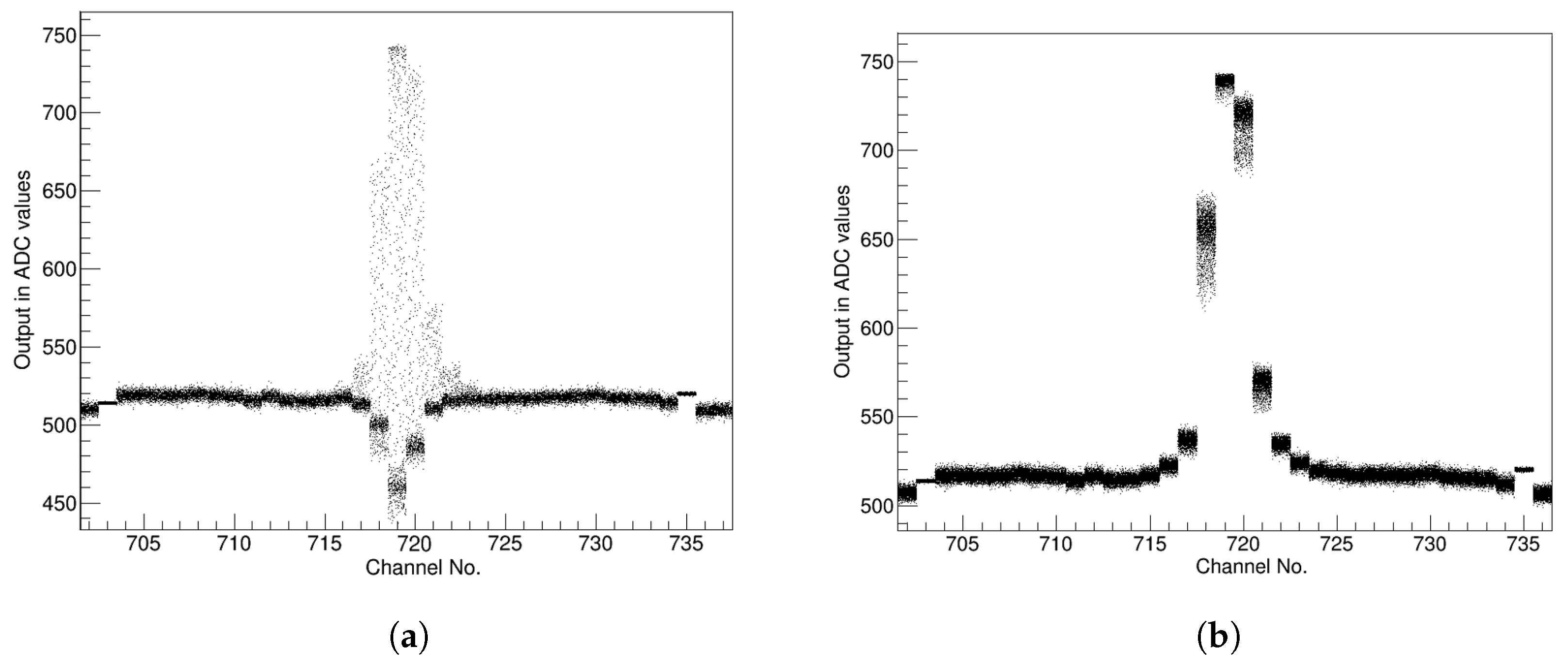
3.2. Synchronism of the Readout for Arbitrary Clocked Systems
3.3. LHCb VELO Modules as a Standalone System
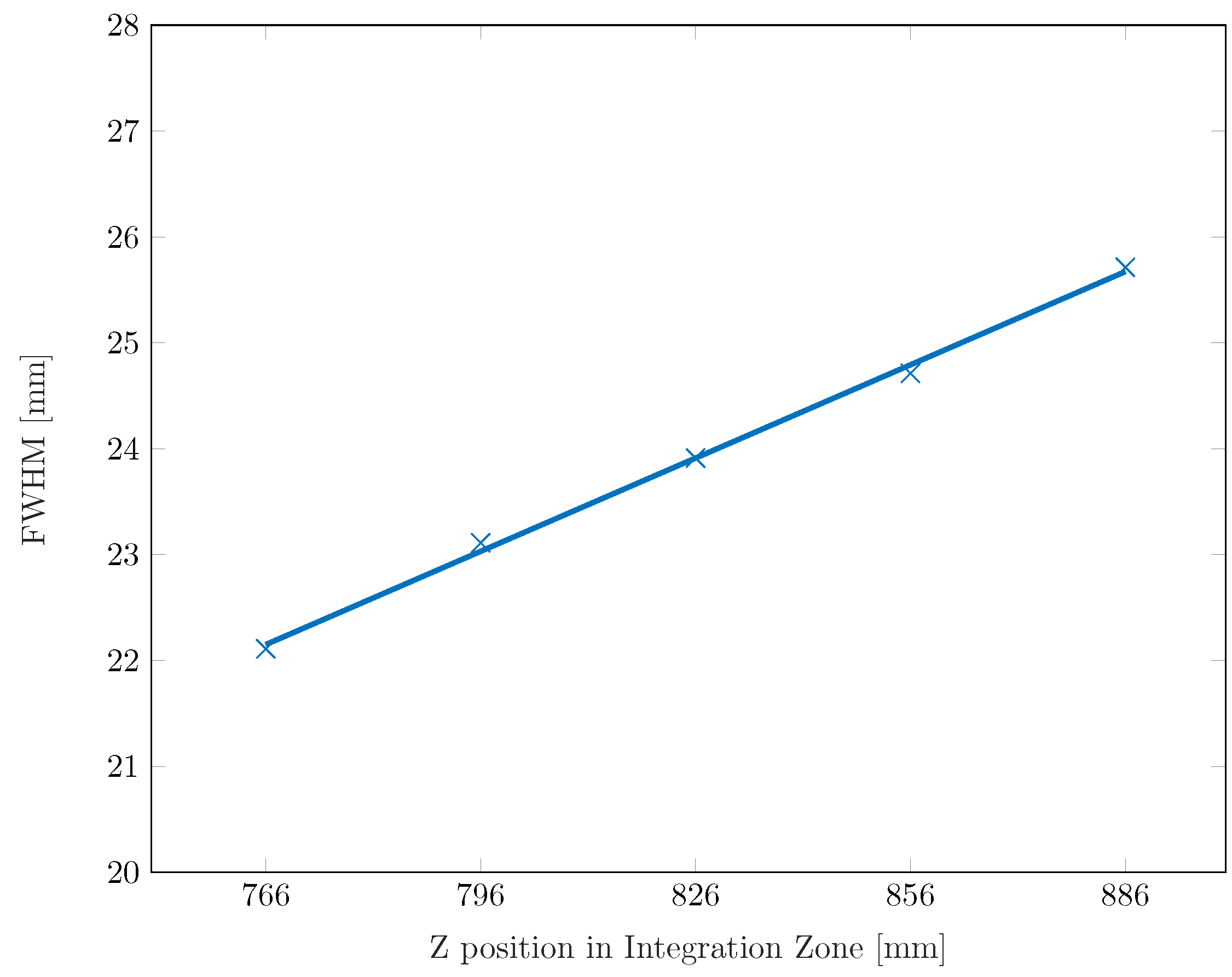
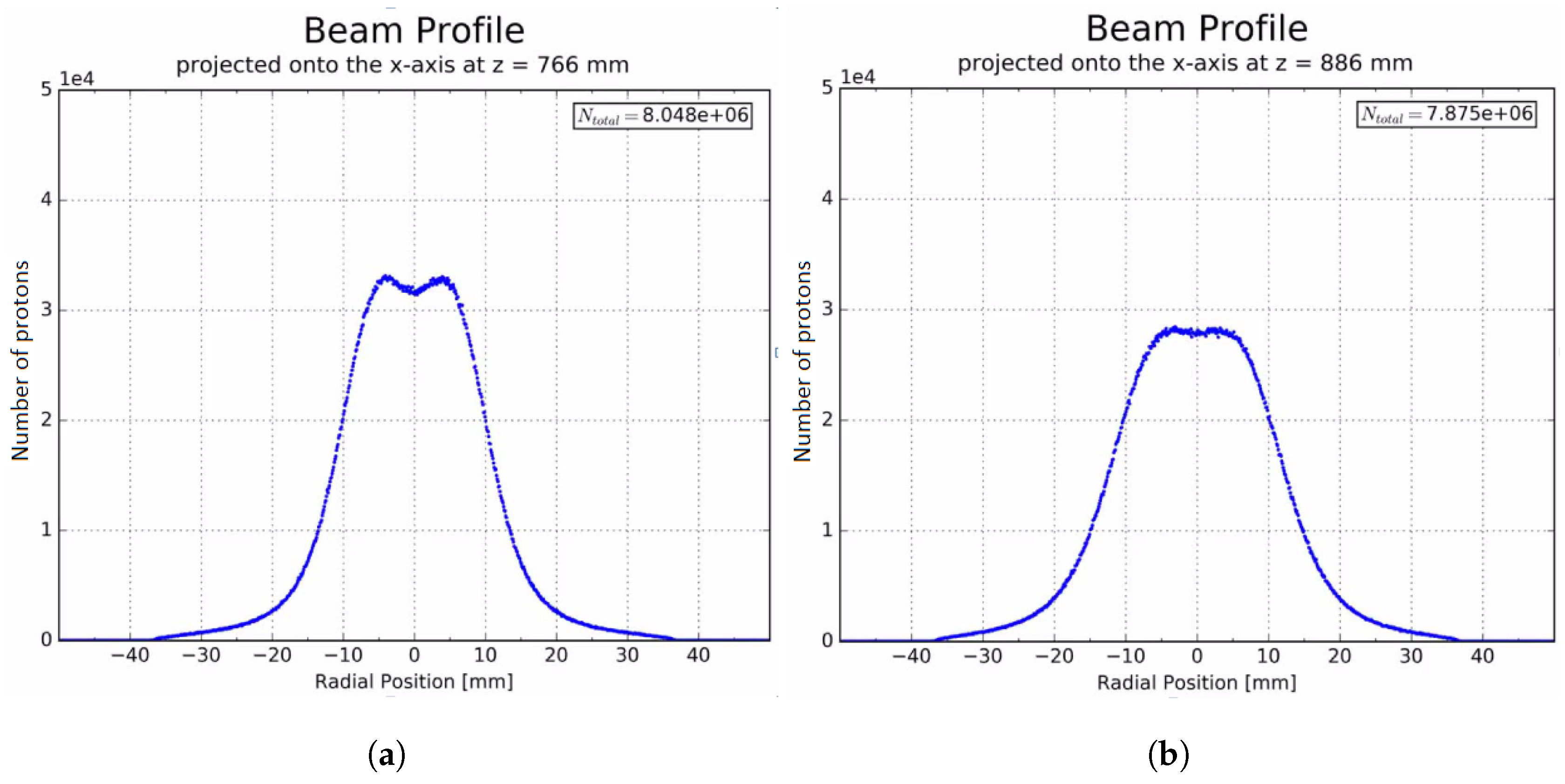
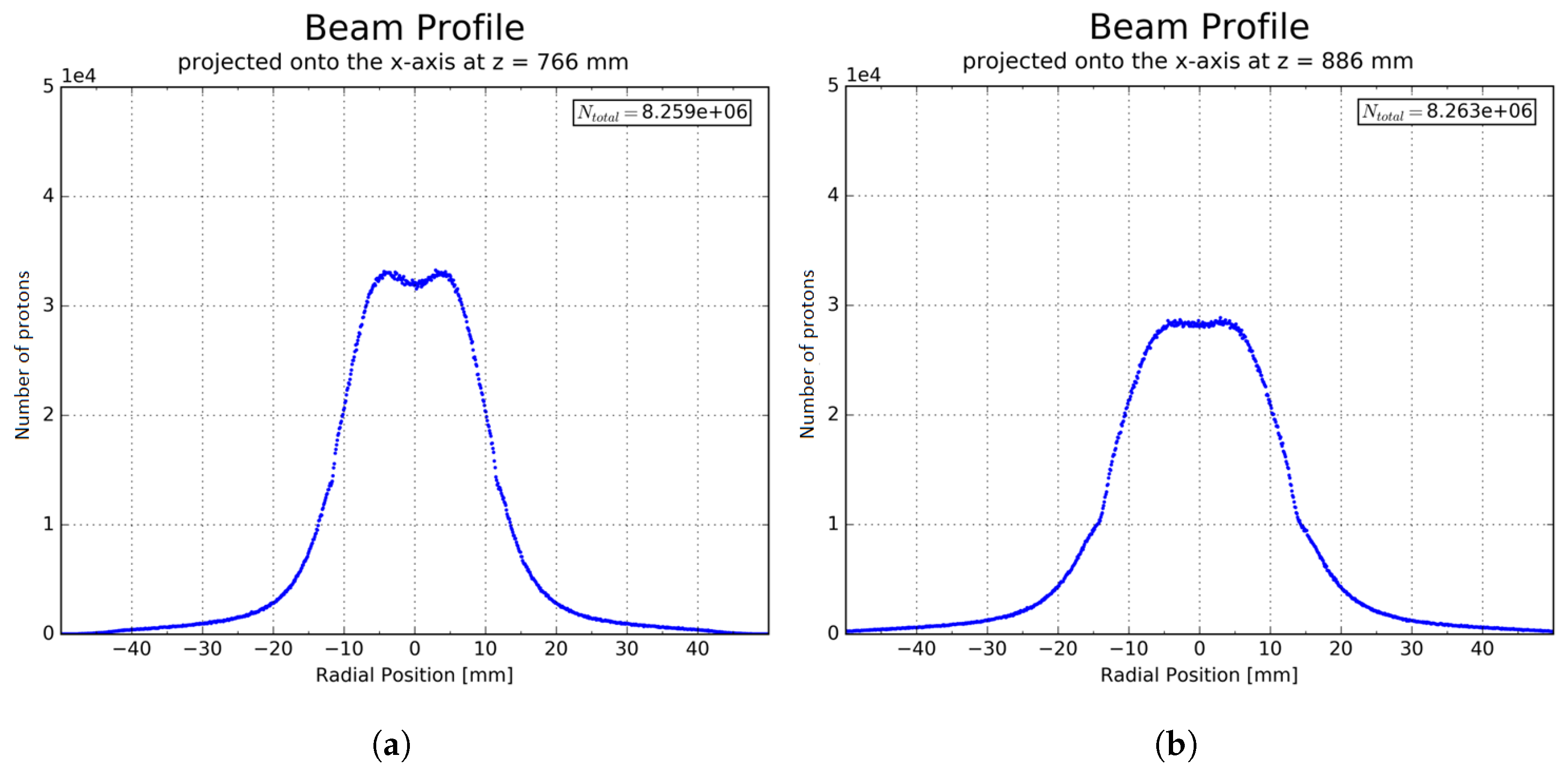
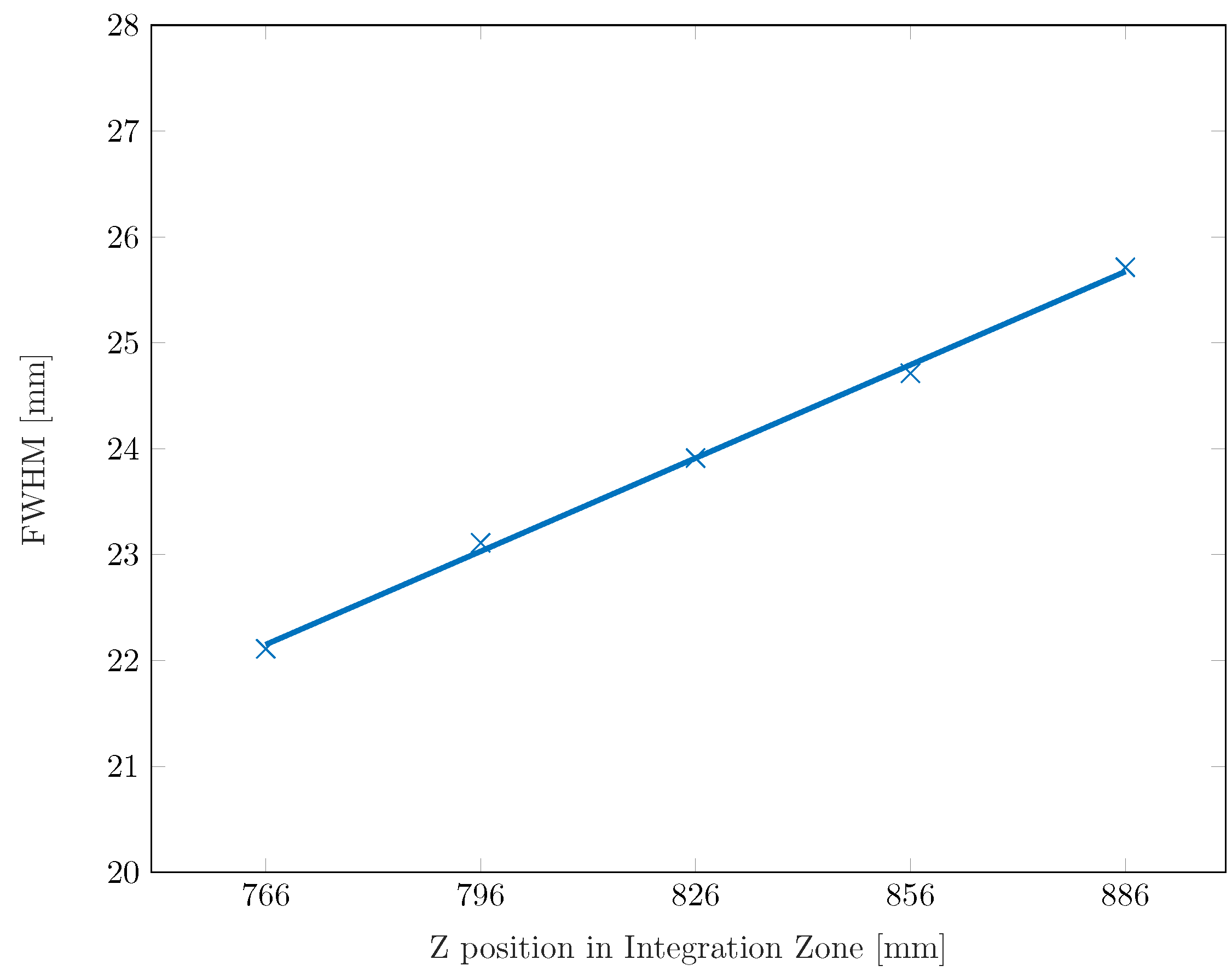
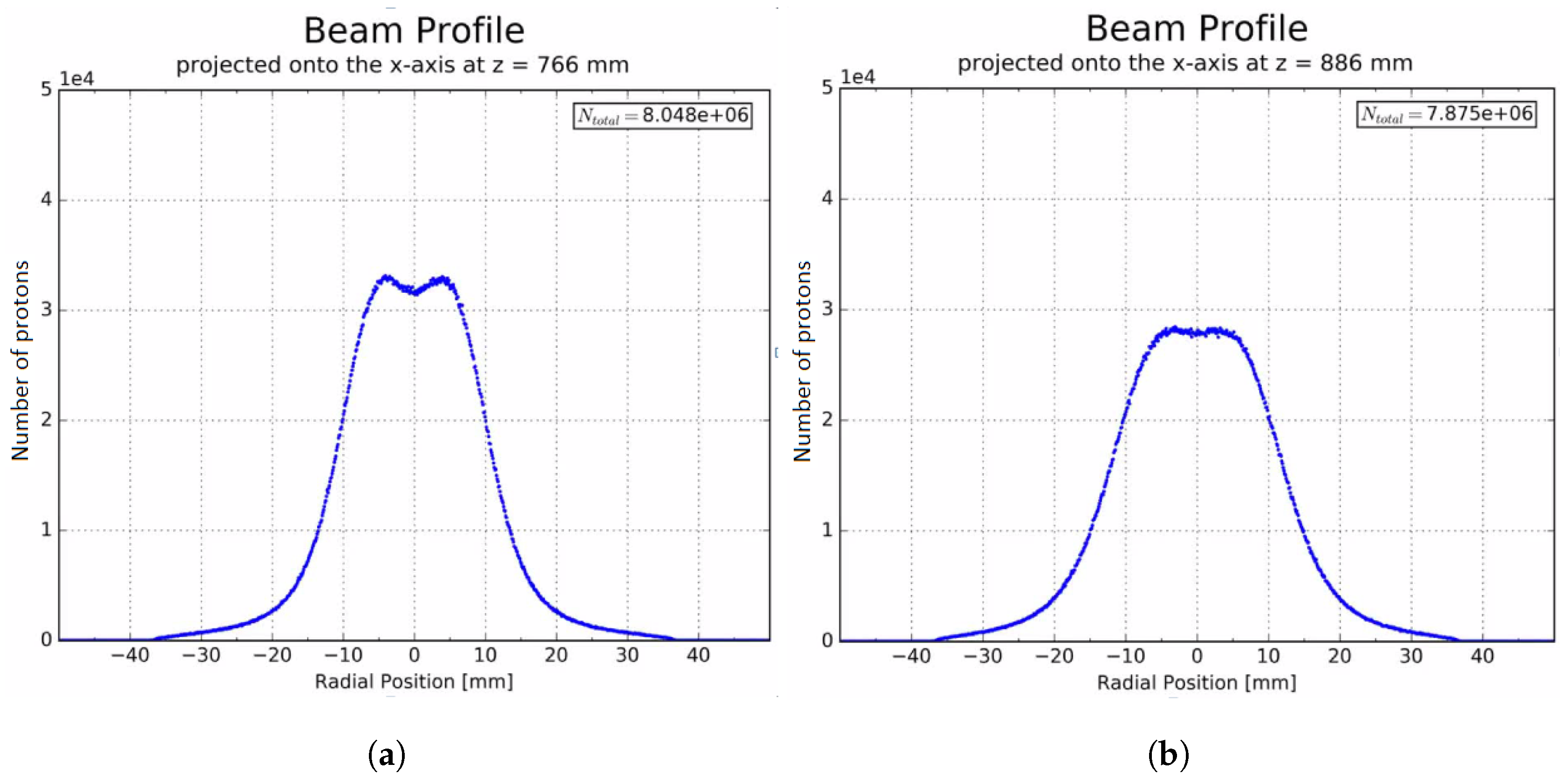
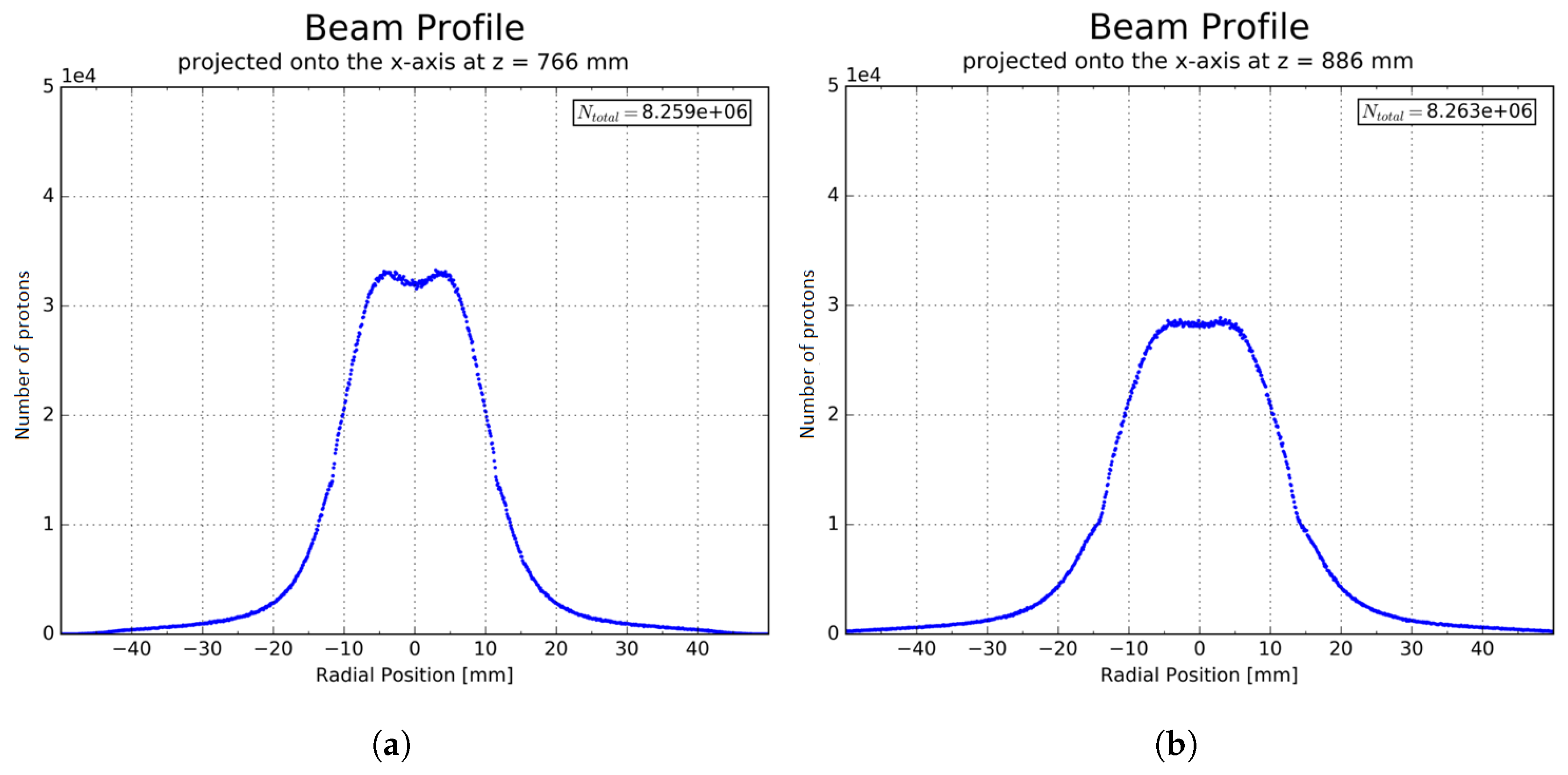
3.4. GEANT4 Beam Behaviour Studies in the Integration Zone
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Paganetti, H. Series in Medical Physics and Biomedical Engineering: Proton Therapy Physics, 1st ed.; CRC Press, Taylor and Francis Group: Boston, MA, USA, 2012; pp. 191–221. ISBN 978-1-4398-3645-3. [Google Scholar]
- Actis, O.; Meer, D.; König, S. Precise on-line position measurement for particle therapy. J. Instrum. 2014, 9, C12037. [Google Scholar] [CrossRef]
- Sadrozinski, H.W.; Ely, S.; Fadeyev, V.; Galloway, Z.; Ngo, J.; Parker, C.; Petersen, B.; Seiden, A.; Zatserklyaniy, A.; Cartiglia, N.; et al. Ultra-fast silicon detectors. Nucl. Instrum. Methods Phys. Res. 2013, 730, 226–231. [Google Scholar] [CrossRef]
- Opalka, L.; Granja, C.; Hartmann, B.; Jakubek, J.; Jaekel, O.; Martisikova, M.; Pospisil, S.; Solc, J. 3D measurement of the radiation distribution in a water phantom in a hadron therapy beam. J. Instrum. 2012, 7, C01085. [Google Scholar] [CrossRef]
- The LHCb Collaboration. The LHCb detector at LHC. J. Instrum. 2008, 3, S08005. [Google Scholar] [CrossRef]
- The LHCb Collaboration. LHCb VELO Technical Design Report; Technical Report CERN-LHCC-2001-0011; The LHCb Collaboration: Geneva, Switzerland, 2001. [Google Scholar]
- Bates, A.G.; Borel, J.; Buytaert, J.; Collins, P.; Eckstein, D.; Eklund, L.; Ferro-Luzzi, M.; Jans, E.; Kennedy, J.; Ketel, T. The LHCb VELO: Status and Upgrade Developments. IEEE Trans. Nucl. Sci. 2001, 53, 1689–1693. [Google Scholar] [CrossRef]
- Loechner, S.; Schmelling, M. The Beetle Reference Manual—Chip Version 1.3, 1.4 and 1.5; Technical Report CERN-LHCb-2005-105; The LHCb Collaboration: Geneva, Switzerland, 2006. [Google Scholar]
- Verlaat, B.; Van Lysebetten, A.; Van Beuzekom, M. CO2 cooling for the LHCb-VELO experiment at CERN. In Proceedings of the 8th IIF/IIR Gustav Lorentzen Conference on Natural Working Fluids, Copenhagen, Denmark, 7–10 September 2008. [Google Scholar]
- Haefeli, G.; Bay, A.; Legger, F.; Locatelli, L.; Christiansen, J.; Wiedner, D. Specification fro a Common Read Out Board for LHCb; Technical Report CERN-LHCb-2003-007; The LHCb Collaboration: Geneva, Switzerland, 2003. [Google Scholar]
- The LHCb Collaboration. LHCb Trigger System Technical Design Report; Technical Report CERN-LHCC-2003-031; The LHCb Collaboration: Geneva, Switzerland, 2003. [Google Scholar]
- Akiba, K. Description of the VELO Timing System and Its Configuration; Technical Report CERN-LHCb-PUB-2011-012; The LHCb Collaboration: Geneva, Switzerland, 2011. [Google Scholar]
- Jacobsson, R.; Jost, B. Timing and Fast Control; Technical Report CERN-LHCb-2001-16; The LHCb Collaboration: Geneva, Switzerland, 2001. [Google Scholar]
- Jacobsson, R. The Final LHCb Readout Supervisor “ODIN”. In Proceedings of the 8th Workshop on Electronics for LHC Experiments, Colmar, France, 9–13 September 2002. [Google Scholar]
- Kacperek, A. Protontherapy of eye tumours in the UK: A review of treatment at Clatterbridge. Appl. Radiat. Isotopes 2009, 67, 378–386. [Google Scholar] [CrossRef] [PubMed]
- Cybulski, T. A Non-Invasive Beam Current Monitor for a Medical Accelerator. Ph.D. Thesis, University of Liverpool, Liverpool, UK, 2017. [Google Scholar]
- Schnuerer, R.; Girard, O.; Haefeli, G.; Welsch, C.; Yap, J.; Zhang, H. Implementation of a Non-invasive Online Beam Monitor at a 60 MeV Proton Therapy Beamline. In Proceedings of the 9th International Particle Accelerator Conference, Vancouver, BC, Canada, 29 April–4 May 2018. [Google Scholar] [CrossRef]
- Clatterbridge Simulation Model. Available online: http://www.hep.ucl.ac.uk/pbt/wiki/Clatterbridge (accessed on 17 December 2018).
- Optimization of Medical Accelerators Project. Available online: https://www.oma-project.eu (accessed on 11 September 2018).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Ion type | p+ |
| Ion max kinetic energy | 62 MeV |
| Energy spread | 0.1% |
| Beam current (treatment) | 1–30 nA |
| Dose rate | 1–40 Gy/min |
| RF frequency | 25.7 MHz |
| RF period | 38.91 ns |
| Bunch length | 1.37 ns |
| Bunch peak current | 138.5 nA |
| Number of ions/s |
| 0.8 V | 0.9 V | 1 V | |
|---|---|---|---|
| Synchronised Output [ADC] | 1275984 | 1863959.3 | 2164706 |
| Non-synchronised Output [ADC] | 323840.7 | 751709.7 | 997398.3 |
| Position z [mm] | 766 | 796 | 826 | 856 | 886 |
| Energy [MeV] | 60.21 | 60.18 | 60.17 | 60.16 | 60.14 |
| Energy loss [%] | 0.07 | 0.12 | 0.13 | 0.15 | 0.18 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schnuerer, R.; Yap, J.; Zhang, H.; Cybulski, T.; Smith, T.; Haefeli, G.; Girard, O.; Szumlak, T.; Welsch, C. Development of the LHCb VELO Detector Modules into a Standalone, Non-Invasive Online Beam Monitor for Medical Accelerators. Instruments 2019, 3, 1. https://doi.org/10.3390/instruments3010001
Schnuerer R, Yap J, Zhang H, Cybulski T, Smith T, Haefeli G, Girard O, Szumlak T, Welsch C. Development of the LHCb VELO Detector Modules into a Standalone, Non-Invasive Online Beam Monitor for Medical Accelerators. Instruments. 2019; 3(1):1. https://doi.org/10.3390/instruments3010001
Chicago/Turabian StyleSchnuerer, Roland, Jacinta Yap, Hao Zhang, Tomasz Cybulski, Tony Smith, Guido Haefeli, Olivier Girard, Tomasz Szumlak, and Carsten Welsch. 2019. "Development of the LHCb VELO Detector Modules into a Standalone, Non-Invasive Online Beam Monitor for Medical Accelerators" Instruments 3, no. 1: 1. https://doi.org/10.3390/instruments3010001
APA StyleSchnuerer, R., Yap, J., Zhang, H., Cybulski, T., Smith, T., Haefeli, G., Girard, O., Szumlak, T., & Welsch, C. (2019). Development of the LHCb VELO Detector Modules into a Standalone, Non-Invasive Online Beam Monitor for Medical Accelerators. Instruments, 3(1), 1. https://doi.org/10.3390/instruments3010001