1. Introduction
The development of optogenetics tools such as channelrhodopsin-2 (ChR2) [
1] encompasses optical methods to efficiently stimulate neurons for investigating how neural circuit structure is related to function. In the optical manipulation of neural circuits, proper choice of the light delivery method is crucial. Ideally, the optical system should be capable of targeting a wide range of regions of interest (ROIs), from single synapses to 3D populations of neurons, and provide a time resolution on the order of millisecond along with micrometer spatial resolution [
2]. Common techniques to fulfill these requirements can be classified into two main categories: point-scanning methods and parallel excitation methods [
3]. The first approach consists of a tightly focused laser beam rastered across the ROIs typically using galvanometric mirrors or acousto-optic devices (AOD) to control the scan pattern. Scanning approaches are limited by the time needed to steer the laser beam: although the scan sequence can be randomized with digital scanners, only one point is ever stimulated at a time [
4]. In fact, the ROIs in the neuron under investigation must be activated within a short temporal window to trigger sufficient depolarization to local action potential.
Alternatively, parallel excitation methods project an image into the sample, simultaneously illuminating all ROIs. Digital micromirror devices (the optically active chip in most digital light projectors) are capable of such image projection, making use of an array micrometer-sized mirrors (“pixels”) to reflect light in or out of the image to form a pattern. These devices modulate amplitude of the incident light, the total power depends on the pattern, and it can be inefficient to generate the relatively high light intensity especially for two-photon stimulation [
5].
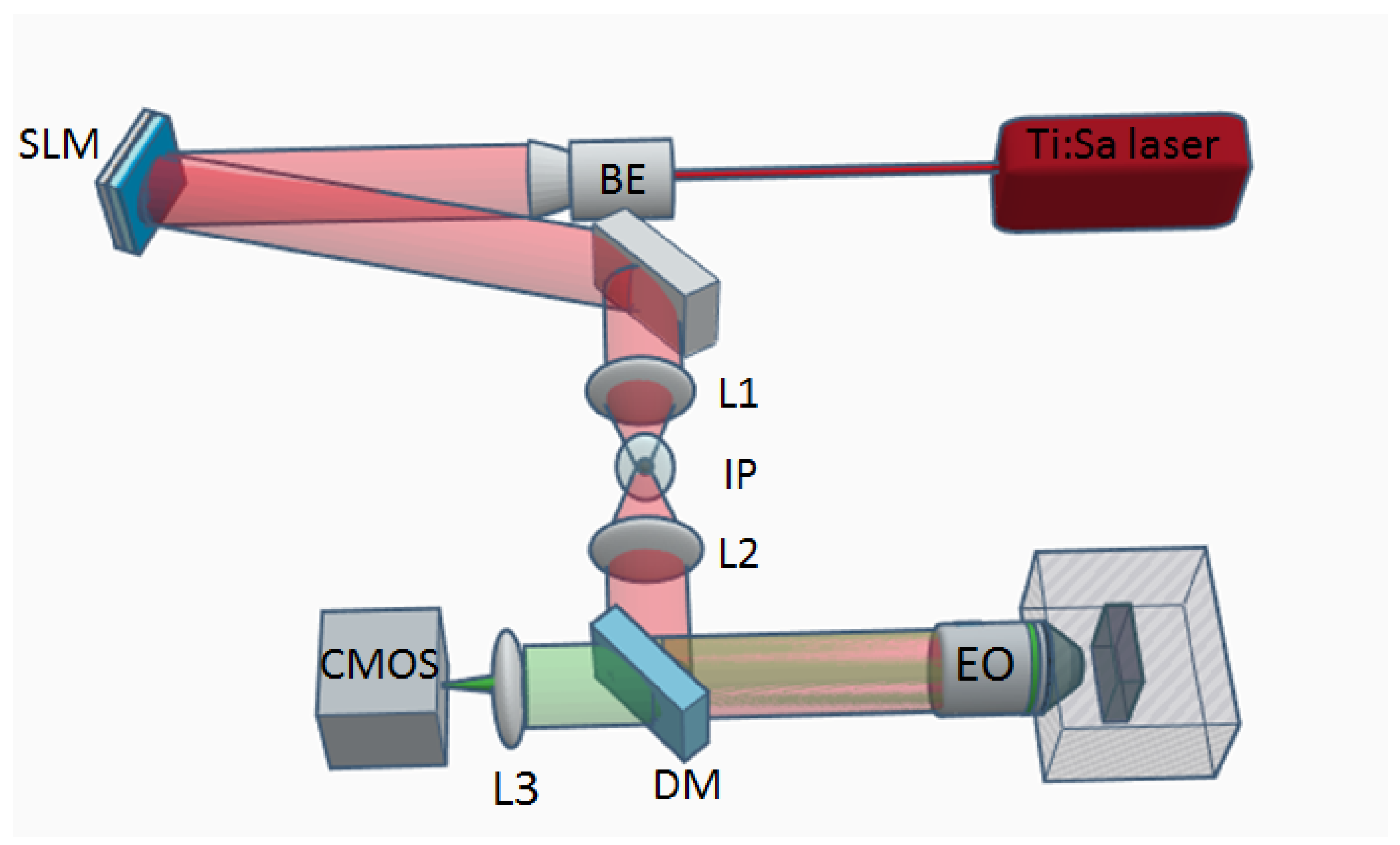
Phase-only liquid crystal on silicon spatial light modulators (LCoS-SLM) are commonly used in optogenetics for the generation of complex illumination patterns within the sample. A LCoS-SLM is a two-dimensional, pixelated device capable of modulating the phase of a monochromatic, polarized light beam, without affecting its intensity. When positioned in the pupil plane of a microscope, SLMs can be used to modulate the intensity distribution of light at the image plane. The phase modulation distribution programmed on the SLM to obtain a desired illumination pattern is called a computer-generated hologram (CGH).
Computer-generated holograms provide a high level of flexibility in the spatial shaping of excitation light in two and three dimensions. The three-dimensional distribution of excitation does not impose a limit on the temporal resolution, which is only dependent on the residence time
, the refresh rate of the SLM (30–60 Hz), and the kinetics of the optogenetics tool [
6]. The calculation of CGH is a non-trivial problem and several algorithms are available. In particular, two main classes of algorithms are available: fast Fourier transform based algorithms and multi-spot algorithms.
While fast Fourier transform algorithms can generate extremely complex illumination patterns in very short times, a strict requirement is that illumination light should be focused either on a two-dimensional plane [
7], or at most on a limited number of of two-dimensional planes at different depths [
8].
On the other hand, multi-spot algorithms tend to be slower, but can generate holograms of diffraction limited spots arbitrarily distributed in the three-dimensional field of view of the optical system. These spots can be used to stimulate sub-cellullar regions in the neuron of interest [
9]. Alternatively, to use a multi-spot hologram to illuminate ROIs of the size of neurons, the entire illumination pattern can be scanned in a spiral or raster pattern [
10], or combined with temporal focusing excitation [
11]. Several algorithms exist to calculate a multi-spot hologram, generally representing a tradeoff between computation speed and quality of the hologram. A good summary of the most common algorithms for the generation of multi-spot holograms can be found in [
12].
The most common way to compute a multi-spot CGH is the Gerchberg–Saxton (GS) algorithm [
13], an iterative procedure of alternating projections allowing for the computation of high quality CGHs in time frames compatible with experimental needs. While the computational cost scales linearly with the amount of generated spots, in a general experimental scenario, calculation of a CGH can take between a few seconds and a couple of minutes. In optogenetics experiments requiring frequent calculation of new stimulation patterns “on-the-fly”, the random superposition (RS) algorithm is sometimes preferred to GS algorithm [
14], sacrificing hologram quality to achieve higher computation speeds.
In this paper, a modified version of the GS algorithm, based on compressive sensing of the pupil function, is presented. The compressive sensing Gerchberg–Saxton algorithm (CS-GS) can generate holograms of equal quality to the standard GS algorithm, but reduces the computational cost by more than one order of magnitude, reaching time scales similar to the RS algorithm.
4. Results
4.1. Computational Results
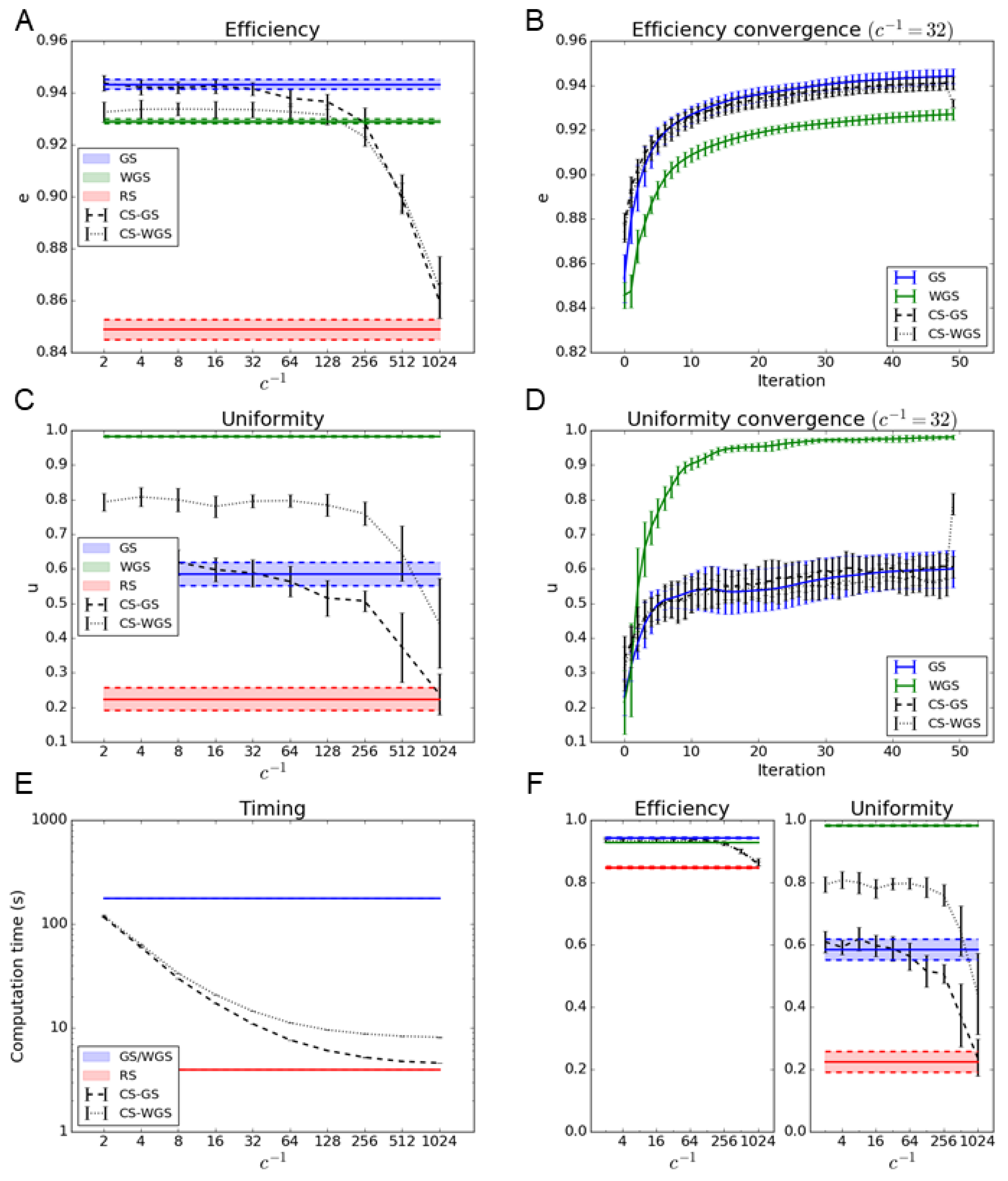
The CS-GS algorithm was tested against the regular GS algorithm, as an upper limit of performance, and the random superposition algorithm, as an expected lower limit of performance. The performance metric used to evaluate the quality of the CGHs were, as in [
12], the efficiency and uniformity of the obtained patterns. The efficiency
e of the CGH is computed as the fraction of the total intensity directed at the generated spots. The uniformity
u is calculated as
where
and
are the intensities of the brightest and dimmest spot generated by the CGH.
As a computational test, CGHs were calculated for a random three-dimensional distribution of 100 spots, simulating a reasonable requirement for a optogenetics experiment, and for a grid of spots in the image plane, representing a worst-case scenario for the uniformity of the pattern, where WGS should perform much better than GS. All variants of the GS algorithm were run for 50 iterations.
Due to the randomized initialization of the values of , the final values of u and e of the CGH can vary slightly for different initializations. All the reported measurements were therefore performed by computing each CGH 10 times, with different random initializations, and calculating the mean and standard deviation of u and e.
The results, reported in
Figure 2 and
Figure 3, show how the CS-GS algorithm has performances virtually identical to GS with compression factors up to
, while providing an improvement in computational time of more than one order of magnitude. Moreover, CS-GS still greatly outperforms RS up to extreme compression factors.
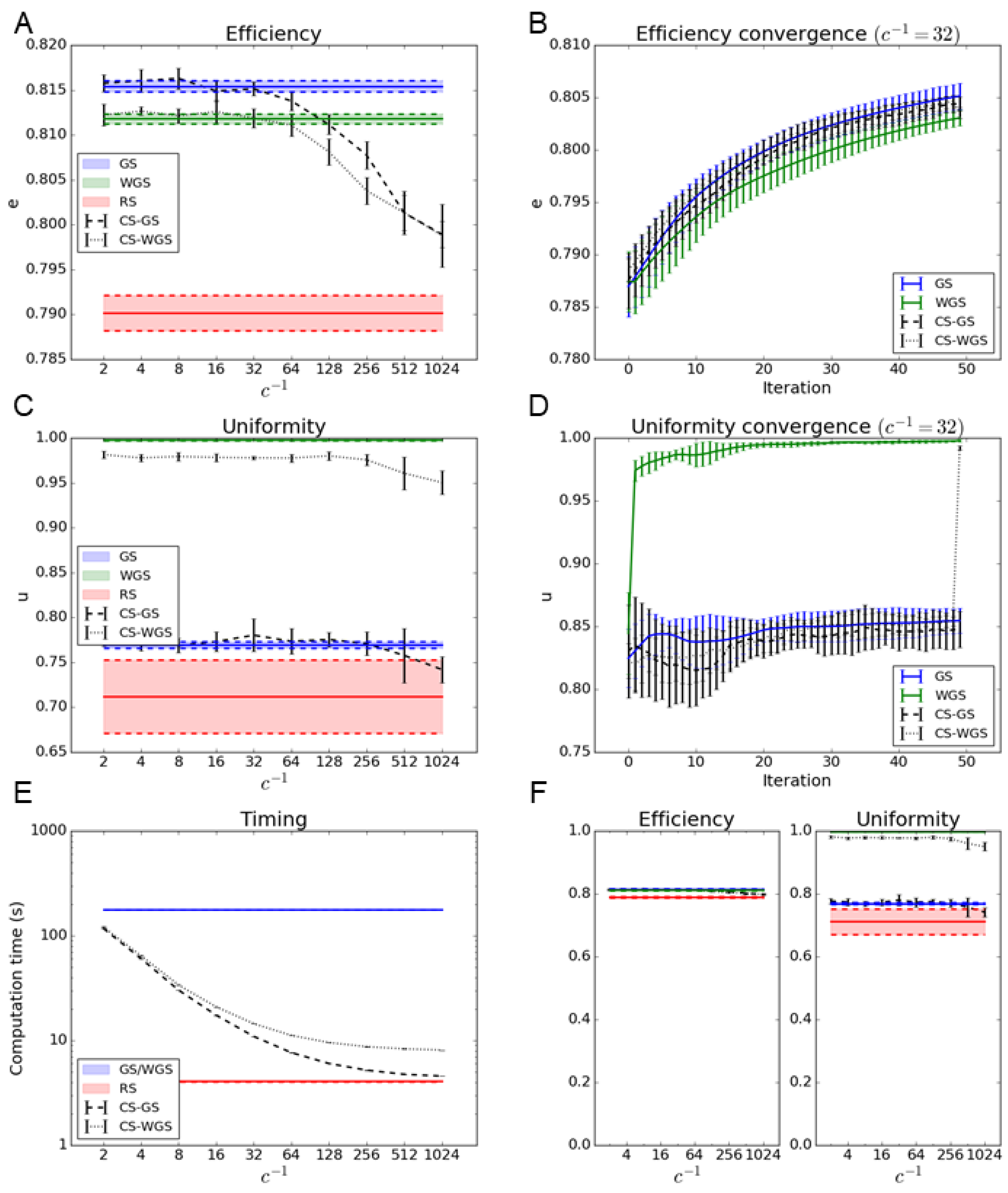
As far as the weighted version is concerned, CS-WGS, only performing a single weighted iteration, does not perform as well as the regular version of WGS, especially in the case of the generation of regular geometrical patterns of spots. However, it still greatly outperforms GS in uniformity, and its deficit in uniformity compared to WGS can be considered practically negligible in the case of randomly distributed patterns of spots.
To rule out the possibility that the computation time difference between the standard and compressed sensing versions of the algorithms could be partially compensated by different convergence rates, efficiency and uniformity were estimated as a function of the iteration number. Since, for the considered experimental parameters, a compression factor of
appears to represent the best compromise between speed and performances for both CS-GS and CS-WGS, such a compression parameter was used for the convergence speed comparison. As shown in
Figure 2 and
Figure 3, no significant difference in convergence speed can be observed. It is apparent from the convergence graphs that CS-GS and CS-WGS only differ from each other in the last iteration, as described in
Section 2.3. This causes the sudden discontinuity in the CS-WGS convergence graph.
4.2. Experimental Results
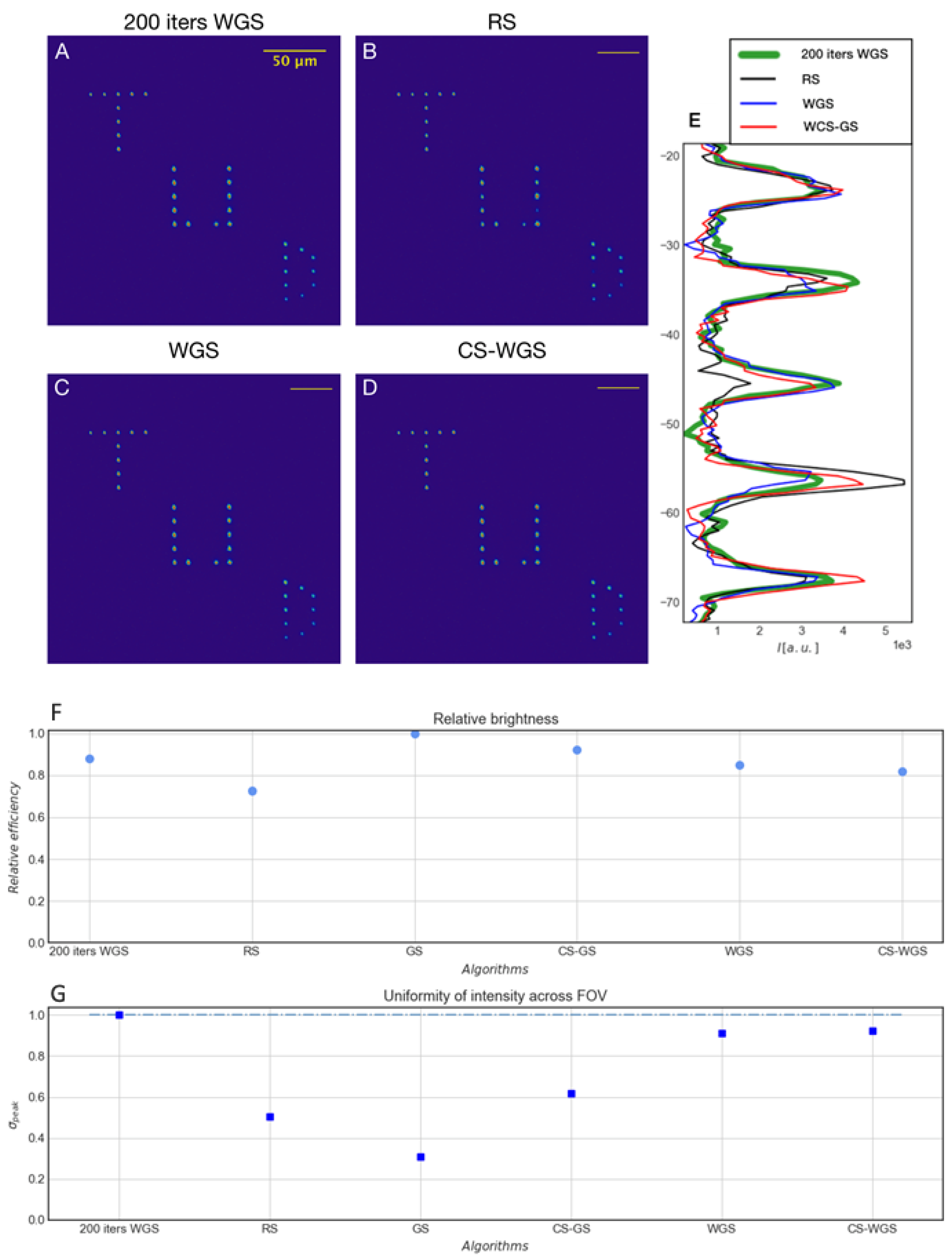
To experimentally compare our methods to RS and iterative projections algorithms, we used each of them to compute the same 2D multi-spot CGH. This pattern contains 25 points arranged in letters shape for the initials of the laboratory institution (Technische Universiteit Delft, TUD) and extending over the complete available field of view. While all iteratively generated CGH were obtained with 100 iterations, we also operated WGS with 200 iterations and considered it as reference term in the performances evaluation. All the compressive sensing methods were computed with a sub-sampling value of .
As qualitatively shown in
Figure 4, panels A–D CS-WGS and WGS outperform RS. The intensity profile from a line of points in each image (
Figure 4, panel E) highlights the lack of excitation for some ROIs in the RS image (the peak corresponding to the third point is almost absent), while all other methods provide comparable results in terms of points intensity.
To quantitatively classify the performances of all algorithms including GS and CS-GS, we estimated the relative brightness and the intensity uniformity across the FOV of the different patterns. For each method, a stack of five images was acquired, and then, on the averaged image, seven random points were selected and fitted with 2D Gaussian profiles. The peak values from the fit are averaged and normalized for each method to produce the relative brightness. The brightness analysis (
Figure 4, panel F) confirmed RS as the least efficient method, while all others show results comparable with the reference WGS.
From the standard deviation of the peaks values (
Figure 4, panel G), we quantified the uniformity of the illumination. As anticipated in the computational results, WGS and CS-WGS algorithms are reaching uniformities that are very close to the golden standard (around 90%) at a fraction of the computational cost. Furthermore, we obtained a slightly higher uniformity for CS-WGS compared to WGS (run with the same number of iterations) corroborating that the deficit in uniformity found in the computational results is practically negligible for randomly distributed patterns.
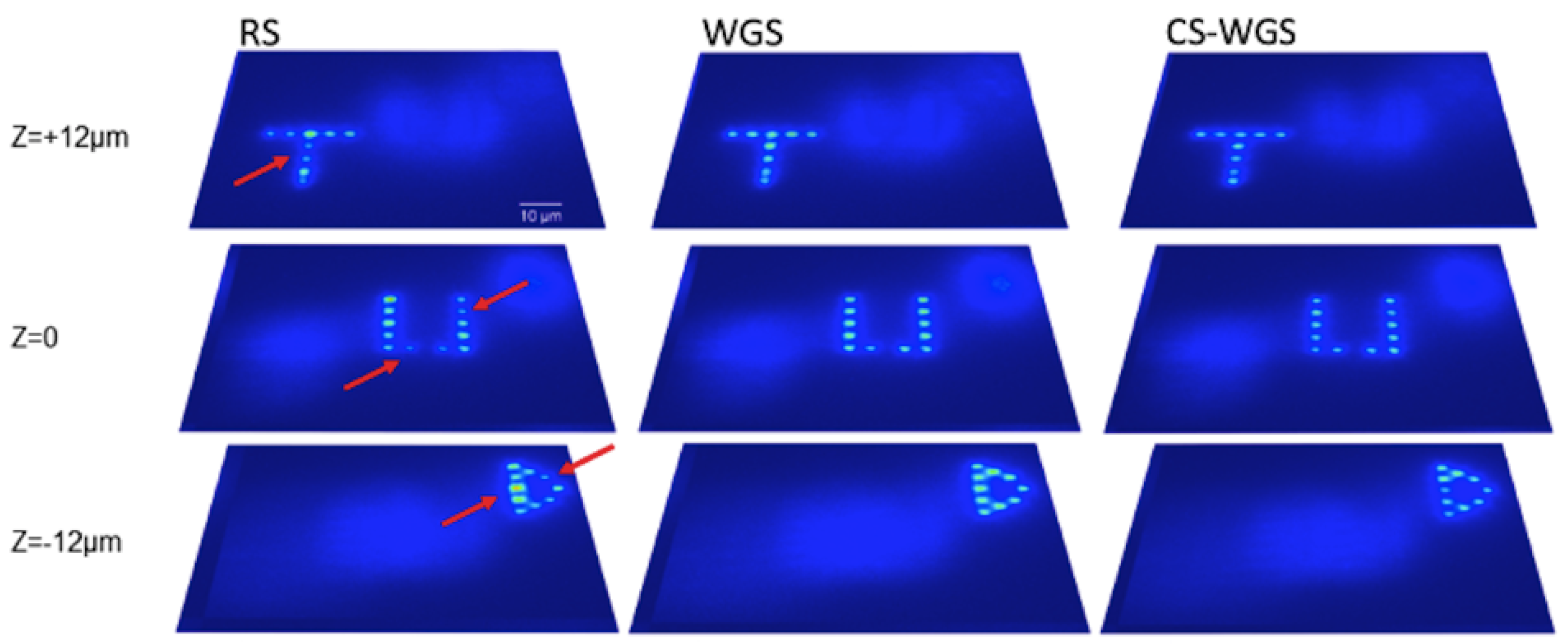
Additionally, a separate dataset with spots distributed in three dimensions is reported in
Figure 5, to prove the performances of the method in three dimensions. As can be observed, the WGS and CS-WGS images are practically indistinguishable, while RS, despite its minimal time saving compared to CS-WGS, has visibly worse performance, with significantly non uniform spots in the distribution.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}