
Dynamic Effects Analysis in Fractional Memristor-Based Rulkov Neuron Model

 , ,
, ,
Abstract

1. Introduction
2. Mathematic Model
2.1. Rulkov’s Model
2.2. Discrete Memristor
2.3. Discrete Memristor-Rulkov Model
3. Dynamics Analysis in Discrete m-Rulkov Model
3.1. Equilibrium Points and Stability Analysis
- If
- If
- If
- If
- If
- If
3.2. Effects of Inductive Power
3.3. Effects of Control Parameter
3.4. Effects of Control Parameter
3.5. Effects of Externally Imposed Effect
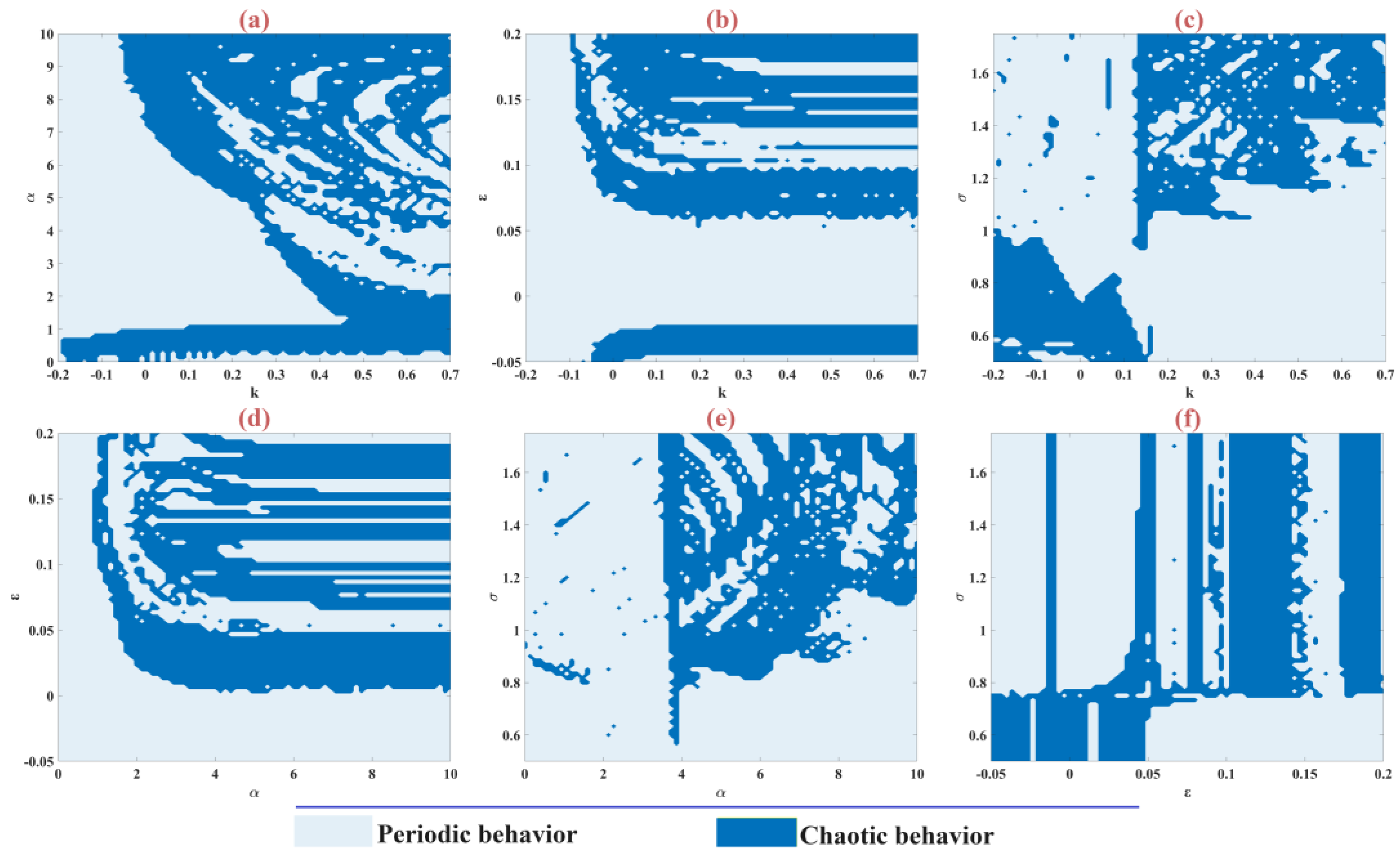
3.6. The Parameter Planes
4. The m-Rulkov Fractional-Order Model
4.1. Description of Discrete Fractional-Order
4.2. Dynamic Behaviour
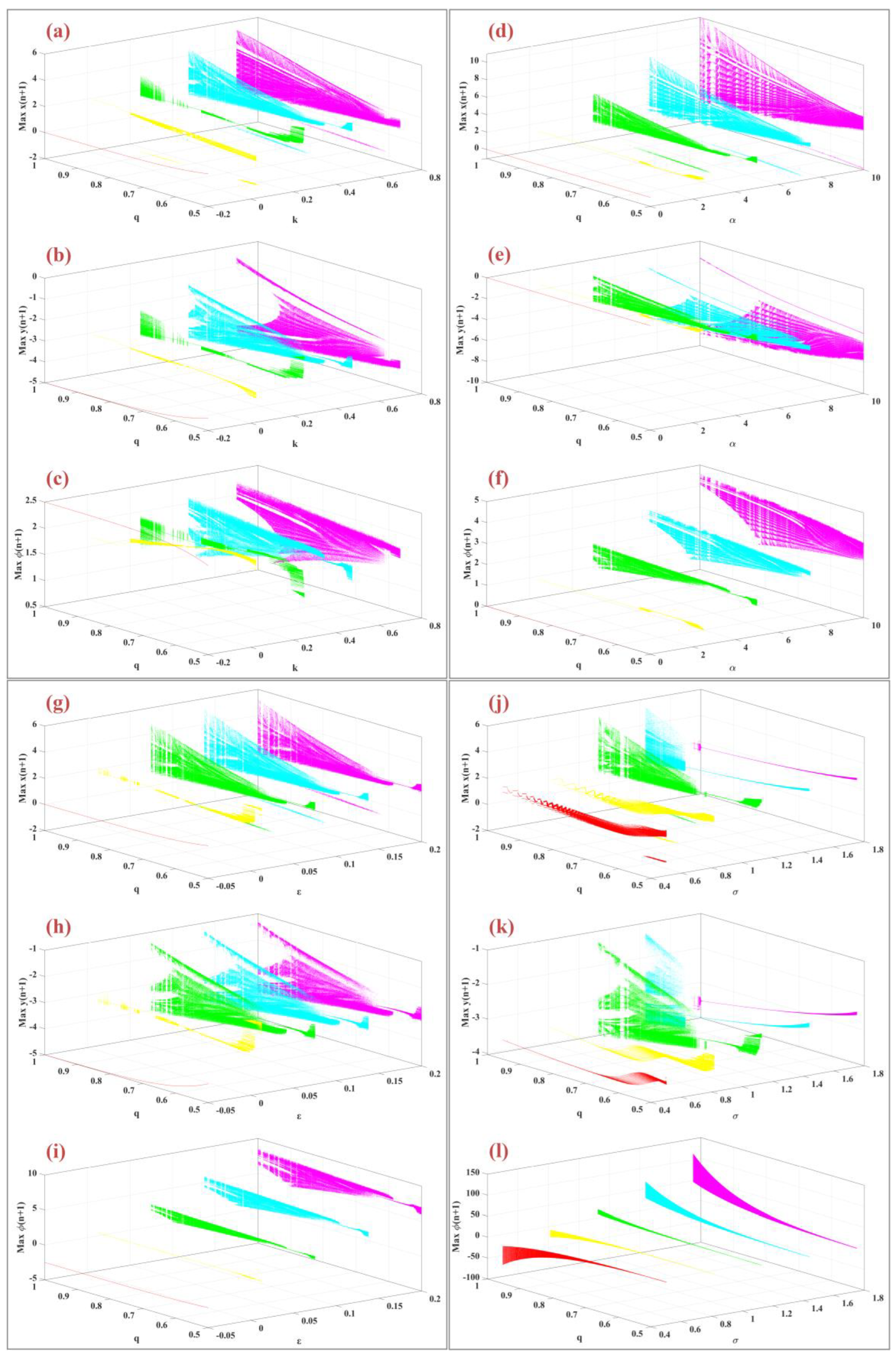
4.3. Effect of the System Parameter
4.4. Effect of the Fractional Order
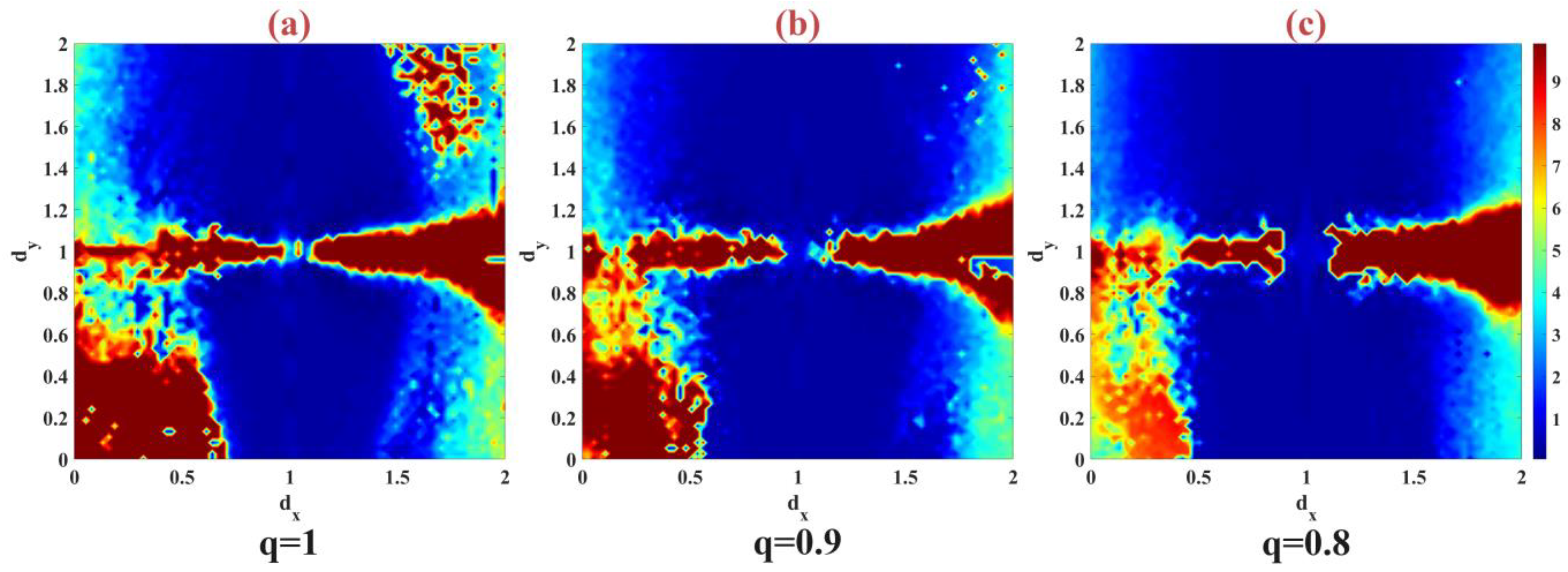
5. Synchronization m-Rulkov Fractional-Order Model
6. Discussion
6.1. Limitations
6.2. Future Work
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author’s and Year | Rulkov Model | Memristor Model | Dynamic Behavior Generated |
|---|---|---|---|
| Lu, Y.-M., et al.; 2022; [49] | 2D model: | The behavior of the Rulkov neuron in response to electromagnetic radiation is simulated using a newly introduced discrete memristor. They analyze the system’s integer and fractional order properties through bifurcation diagrams, Lyapunov exponents, and recurrence plots. The findings indicate that the fractional order system exhibits more complex dynamics compared to the integer order system, including increased chaos, multiple stable states, and transient chaotic behavior. | |
| Lu, Y., C. Wang, and Q. Deng; 2022; [50] | 1D model: | They investigate the properties of a two-neuron Rulkov map coupled with memristor elements and a multi-neuron Rulkov neural network. Various numerical simulation techniques, including normalized average synchronization error, bifurcation diagrams, phase portraits, and spatial and temporal patterns, are employed in the analysis. The results reveal that in neural networks coupled with discrete memristors, the system dynamics are influenced by parameters and coupling factors, leading to complex and intriguing behavioral changes. | |
| Bao, H., et al.; 2023; [51] | 2D model: | They explore the memristor’s dynamic impact on the neuron model by analyzing bifurcation diagrams and firing patterns. Their findings demonstrate that the proposed Rulkov neuron model effectively captures a range of neuron firing patterns and can generate hyper-chaotic attractors that are significantly influenced by the memristor’s initial value. This suggests that the introduced memristor is highly beneficial for enhancing the original neuron model. | |
| Li, Y., et al.; 2023; [52] | 3D model: | In their proposed memristor Rulkov neuron, chaotic firing is controlled locally, with the range of chaos adjustable through two independent controllers. These controllers allow direct manipulation of amplitude and frequency. Additionally, the system compensates for complex enhancer-perturbative dynamics, enabling the initial membrane potential to access various self-reproducing attractors and modulate complex firing patterns. This indicates a coexistence of both homogeneous and heterogeneous polystability. | |
| Li, H. and F. Min; 2024; [53] | 2D model: | They have examined the spatio-temporal patterns, snapshots, and recurrence graphs of nodes in a large-scale discrete Rulkov star-loop neural network model. Their analysis reveals a variety of behaviors in the network, including pseudo-two-well, asynchronous, multi-cluster, single, synchronized, and continuous traveling wave modes. Additionally, they investigate how memory coupling strength and initial conditions affect network behaviors using three metrics: root mean square deviation, average correlation coefficient, and normalized time-averaged synchronization error. | |
| Cao, H., et al.; 2024; [54] | 2D model: | They employed various methods and parameters to investigate the dynamic behaviors of the discrete memristor map in the context of discrete Chialvo and Rulkov neuron coupling. Their analysis utilized phase diagrams, recurrence plots, bifurcation diagrams, Lyapunov power spectra, and spectral entropy complexity. The study observed various phenomena, including turbulent, chaotic, and periodic attractors, as well as various hidden and simultaneous firing modes. Additionally, they found state transitions and the coexistence of attractors in different types of hyperchaotic regimes. | |
| Ding, D., et al.; 2024; [55] | 2D model: | They explore a fractional-order Rulkov neuron model with a discrete memristor subjected to external electromagnetic radiation. The effect of electromagnetic radiation is simulated by fluctuating magnetic flux passing through the neuron membrane. The fractional-order Rulkov neural model dynamics are analyzed using phase attractors, maximum Lyapunov exponents, bifurcation diagrams, and other methods. Additionally, they employ a technique that integrates discrete wavelet transforms, discrete cosine transforms, and chaos index interpolation for their analysis. | |
| Proposed Model | 2D model: | , | We introduce a discrete fractional-order derivative model for the Rulkov memristor neuron model to explore memory effects within this framework. Our findings indicate that the fractional model provides greater accuracy compared to numerical models and effectively simulates explosive patterns and chaotic phenomena. Additionally, our study of the synchronization between two Rulkov neurons with a fractional discrete memristor reveals that coupling strength and fractional-order parameters have a significant impact on neuronal behavior. |
References
- Foroutannia, A.; Ghasemi, M. Predicting cortical oscillations with bidirectional LSTM network: A simulation study. Nonlinear Dyn. 2023, 111, 8713–8736. [Google Scholar] [CrossRef]
- Ghasemi, M.; Foroutannia, A.; Nikdelfaz, F. A PID controller for synchronization between master-slave neurons in fractional-order of neocortical network model. J. Theor. Biol. 2023, 556, 111311. [Google Scholar] [CrossRef]
- Rocsoreanu, C.; Georgescu, A.; Giurgiteanu, N. The FitzHugh-Nagumo Model: Bifurcation and Dynamics; Springer Science & Business Media: Berlin, Germany, 2012; Volume 10. [Google Scholar]
- Hodgkin, A.L.; Huxley, A.F. A quantitative description of membrane current and its application to conduction and excitation in nerve. J. Physiol. 1952, 117, 500. [Google Scholar] [CrossRef] [PubMed]
- Pakdaman, K. Periodically forced leaky integrate-and-fire model. Phys. Rev. E 2001, 63, 041907. [Google Scholar] [CrossRef] [PubMed]
- González-Miranda, J. Complex bifurcation structures in the Hindmarsh–Rose neuron model. Int. J. Bifurc. Chaos 2007, 17, 3071–3083. [Google Scholar] [CrossRef]
- Behdad, R.; Binczak, S.; Dmitrichev, A.S.; Nekorkin, V.I.; Bilbault, J.-M. Artificial electrical morris–lecar neuron. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 1875–1884. [Google Scholar] [CrossRef]
- Foroutannia, A.; Nazarimehr, F.; Ghasemi, M.; Jafari, S. Chaos in memory function of sleep: A nonlinear dynamical analysis in thalamocortical study. J. Theor. Biol. 2021, 528, 110837. [Google Scholar] [CrossRef]
- Rulkov, N.F. Modeling of spiking-bursting neural behavior using two-dimensional map. Phys. Rev. E 2002, 65, 041922. [Google Scholar] [CrossRef]
- Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Kim, K.M.; Williams, R.S. A family of stateful memristor gates for complete cascading logic. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 4348–4355. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Simanjuntak, F.M.; Saminathan, R.; Panda, D.; Tseng, T.-Y. Improving linearity by introducing Al in HfO2 as a memristor synapse device. Nanotechnology 2019, 30, 445205. [Google Scholar] [CrossRef]
- Pal, S.; Bose, S.; Ki, W.-H.; Islam, A. Design of power-and variability-aware nonvolatile RRAM cell using memristor as a memory element. IEEE J. Electron Devices Soc. 2019, 7, 701–709. [Google Scholar] [CrossRef]
- Xu, C.; Wang, C.; Sun, Y.; Hong, Q.; Deng, Q.; Chen, H. Memristor-based neural network circuit with weighted sum simultaneous perturbation training and its applications. Neurocomputing 2021, 462, 581–590. [Google Scholar] [CrossRef]
- Chen, M.; Sun, M.; Bao, H.; Hu, Y.; Bao, B. Flux–charge analysis of two-memristor-based Chua’s circuit: Dimensionality decreasing model for detecting extreme multistability. IEEE Trans. Ind. Electron. 2019, 67, 2197–2206. [Google Scholar] [CrossRef]
- Ishaq Ahamed, A.; Lakshmanan, M. Nonsmooth bifurcations, transient hyperchaos and hyperchaotic beats in a memristive Murali–Lakshmanan–Chua circuit. Int. J. Bifurc. Chaos 2013, 23, 1350098. [Google Scholar] [CrossRef]
- Liang, Z.; He, S.; Wang, H.; Sun, K. A novel discrete memristive chaotic map. Eur. Phys. J. Plus 2022, 137, 1–11. [Google Scholar] [CrossRef]
- Xu, Q.; Tan, X.; Zhang, Y.; Bao, H.; Hu, Y.; Bao, B.; Chen, M. Riddled attraction basin and multistability in three-element-based memristive circuit. Complexity 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Hu, M.; Li, H.; Chen, Y.; Wu, Q.; Rose, G.S.; Linderman, R.W. Memristor crossbar-based neuromorphic computing system: A case study. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1864–1878. [Google Scholar] [CrossRef]
- Yao, P.; Wu, H.; Gao, B.; Tang, J.; Zhang, Q.; Zhang, W.; Yang, J.J.; Qian, H. Fully hardware-implemented memristor convolutional neural network. Nature 2020, 577, 641–646. [Google Scholar] [CrossRef]
- Khennaoui, A.A.; Ouannas, A.; Boulaaras, S.; Pham, V.-T.; Azar, A.T. A fractional map with hidden attractors: Chaos and control. Eur. Phys. J. Spec. Top. 2020, 229, 1083–1093. [Google Scholar] [CrossRef]
- Rahimy, M. Applications of fractional differential equations. Appl. Math. Sci. 2010, 4, 2453–2461. [Google Scholar]
- Huang, L.-L.; Wu, G.-C.; Baleanu, D.; Wang, H.-Y. Discrete fractional calculus for interval–valued systems. Fuzzy Sets Syst. 2021, 404, 141–158. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, K.; He, S.; Peng, D. Parameter identification of fractional-order discrete chaotic systems. Entropy 2019, 21, 27. [Google Scholar] [CrossRef]
- Podlubny, I.; Skovranek, T.; Jara, B.M.V.; Petras, I.; Verbitsky, V.; Chen, Y. Matrix approach to discrete fractional calculus III: Non-equidistant grids, variable step length and distributed orders. Philos. Transact. A Math. Phys. Eng. Sci. 2013, 371, 20120153. [Google Scholar] [CrossRef]
- Muslih, S.I.; Agrawal, O.P. Propagation of electromagnetic waves in fractional space time. Found. Phys. 2023, 53, 37. [Google Scholar]
- Zhang, Y.; Jiang, K.; Wang, Z.; Zhang, F. Correlated insulating phases of twisted bilayer graphene at commensurate filling fractions: A Hartree-Fock study. Phys. Rev. B 2020, 102, 035136. [Google Scholar] [CrossRef]
- Dhivakaran, P.B.; Vinodkumar, A.; Vijay, S.; Lakshmanan, S.; Alzabut, J.; El-Nabulsi, R.A.; Anukool, W. Bipartite synchronization of fractional-order memristor-based coupled delayed neural networks with pinning control. Mathematics 2022, 10, 3699. [Google Scholar] [CrossRef]
- Kiryakova, V. Unified approach to fractional calculus images of special functions—A survey. Mathematics 2020, 8, 2260. [Google Scholar] [CrossRef]
- Dar, M.R.; Kant, N.A.; Khanday, F.A. Dynamics and implementation techniques of fractional-order neuron models: A survey. In Fractional Order Systems; Elsevier: Amsterdam, The Netherlands, 2022; pp. 483–511. [Google Scholar]
- Peng, Y.; Sun, K.; He, S. A discrete memristor model and its application in Hénon map. Chaos Solitons Fractals 2020, 137, 109873. [Google Scholar] [CrossRef]
- Bao, B.C.; Li, H.; Huagan, W.; Zhang, X.; Chen, M. Hyperchaos in a second-order discrete memristor-based map model. Electron. Lett. 2020, 56, 769–770. [Google Scholar] [CrossRef]
- Bao, H.; Hu, A.; Liu, W.; Bao, B. Hidden bursting firings and bifurcation mechanisms in memristive neuron model with threshold electromagnetic induction. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 502–511. [Google Scholar] [CrossRef]
- Hong, Q.; Zhao, L.; Wang, X. Novel circuit designs of memristor synapse and neuron. Neurocomputing 2019, 330, 11–16. [Google Scholar] [CrossRef]
- López, J.; Coccolo, M.; Capeáns, R.; Sanjuán, M.A. Controlling the bursting size in the two-dimensional Rulkov model. Commun. Nonlinear Sci. Numer. Simul. 2023, 120, 107184. [Google Scholar] [CrossRef]
- Ramírez-Ávila, G.M.; Depickère, S.; Jánosi, I.M.; Gallas, J.A.C. Distribution of spiking and bursting in Rulkov’s neuron model. Eur. Phys. J. Spec. Top. 2022, 231, 319–328. [Google Scholar] [CrossRef]
- Li, K.; Bao, H.; Li, H.; Ma, J.; Hua, Z.; Bao, B. Memristive Rulkov neuron model with magnetic induction effects. IEEE Trans. Ind. Inf. 2021, 18, 1726–1736. [Google Scholar] [CrossRef]
- Gottwald, G.A.; Melbourne, I. On the implementation of the 0–1 test for chaos. SIAM J. Appl. Dyn. Syst. 2009, 8, 129–145. [Google Scholar] [CrossRef]
- Li, J.; Wang, C.; Deng, Q. Symmetric multi-double-scroll attractors in Hopfield neural network under pulse controlled memristor. Nonlinear Dyn. 2024, 112, 14463–14477. [Google Scholar] [CrossRef]
- Wang, C.; Liang, J.; Deng, Q. Dynamics of heterogeneous Hopfield neural network with adaptive activation function based on memristor. Neural Netw. 2024, 178, 106408. [Google Scholar] [CrossRef]
- Deng, Q.; Wang, C.; Lin, H. Memristive Hopfield neural network dynamics with heterogeneous activation functions and its application. Chaos Solitons Fractals 2024, 178, 114387. [Google Scholar] [CrossRef]
- Liu, X.; Tang, D.; Hong, L. A fractional-order sinusoidal discrete map. Entropy 2022, 24, 320. [Google Scholar] [CrossRef]
- Danca, M.-F.; Fečkan, M.; Kuznetsov, N. Chaos control in the fractional order logistic map via impulses. Nonlinear Dyn. 2019, 98, 1219–1230. [Google Scholar] [CrossRef]
- Vivekanandhan, G.; Abdolmohammadi, H.R.; Natiq, H.; Rajagopal, K.; Jafari, S.; Namazi, H. Dynamic analysis of the discrete fractional-order Rulkov neuron map. Math. Biosci. Eng. 2023, 20, 4760–4781. [Google Scholar]
- Dawson, S.P.; Grebogi, C.; Yorke, J.A.; Kan, I.; Koçak, H. Antimonotonicity: Inevitable reversals of period-doubling cascades. Phys. Lett. A 1992, 162, 249–254. [Google Scholar] [CrossRef]
- Li, K.; Bao, B.; Ma, J.; Chen, M.; Bao, H. Synchronization transitions in a discrete memristor-coupled bi-neuron model. Chaos Solitons Fractals 2022, 165, 112861. [Google Scholar] [CrossRef]
- Mirzaei, S.; Mehrabbeik, M.; Rajagopal, K.; Jafari, S.; Chen, G. Synchronization of a higher-order network of Rulkov maps. Chaos 2022, 32. [Google Scholar] [CrossRef]
- Lu, Y.-M.; Wang, C.-H.; Deng, Q.-L.; Xu, C. The dynamics of a memristor-based Rulkov neuron with fractional-order difference. Chin. Phys. B 2022, 31, 060502. [Google Scholar] [CrossRef]
- Lu, Y.; Wang, C.; Deng, Q. Rulkov neural network coupled with discrete memristors. Netw. Comput. Neural Syst. 2022, 33, 214–232. [Google Scholar] [CrossRef]
- Bao, H.; Li, K.; Ma, J.; Hua, Z.; Xu, Q.; Bao, B. Memristive effects on an improved discrete Rulkov neuron model. Sci. China Technol. Sci. 2023, 66, 3153–3163. [Google Scholar] [CrossRef]
- Li, Y.; Li, C.; Lei, T.; Yang, Y.; Chen, G. Offset boosting-entangled complex dynamics in the memristive rulkov neuron. IEEE Trans. Ind. Electron. 2023, 71, 9569–9579. [Google Scholar] [CrossRef]
- Li, H.; Min, F. Large-Scale Memrisitive Rulkov Ring-Star Neural Network with Complex Spatio-Temporal Dynamics. IEEE Trans. Ind. Inf. 2024, 20, 10259–10268. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Banerjee, S.; Cao, Y.; Mou, J. A discrete Chialvo–Rulkov neuron network coupled with a novel memristor model: Design, Dynamical analysis, DSP implementation and its application. Chaos Solitons Fractals 2024, 179, 114466. [Google Scholar] [CrossRef]
- Ding, D.; Niu, Y.; Yang, Z.; Wang, J.; Wang, W.; Wang, M.; Jin, F. Extreme multi-stability and microchaos of fractional-order memristive Rulkov neuron model considering magnetic induction and its digital watermarking application. Nonlinear Dyn. 2024, 112, 15523–15545. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghasemi, M.; Raeissi, Z.M.; Foroutannia, A.; Mohammadian, M.; Shakeriaski, F. Dynamic Effects Analysis in Fractional Memristor-Based Rulkov Neuron Model. Biomimetics 2024, 9, 543. https://doi.org/10.3390/biomimetics9090543
Ghasemi M, Raeissi ZM, Foroutannia A, Mohammadian M, Shakeriaski F. Dynamic Effects Analysis in Fractional Memristor-Based Rulkov Neuron Model. Biomimetics. 2024; 9(9):543. https://doi.org/10.3390/biomimetics9090543
Chicago/Turabian StyleGhasemi, Mahdieh, Zeinab Malek Raeissi, Ali Foroutannia, Masoud Mohammadian, and Farshad Shakeriaski. 2024. "Dynamic Effects Analysis in Fractional Memristor-Based Rulkov Neuron Model" Biomimetics 9, no. 9: 543. https://doi.org/10.3390/biomimetics9090543
APA StyleGhasemi, M., Raeissi, Z. M., Foroutannia, A., Mohammadian, M., & Shakeriaski, F. (2024). Dynamic Effects Analysis in Fractional Memristor-Based Rulkov Neuron Model. Biomimetics, 9(9), 543. https://doi.org/10.3390/biomimetics9090543