1. Introduction
In recent years, intelligent manufacturing has become a popular research direction, which realizes the automation, intelligence, and high efficiency of the production process [
1,
2]. As an important part of intelligent manufacturing, various types of robots are widely studied [
3,
4,
5,
6,
7,
8,
9]. In the field of engineering, the redundant robot arm is always a hot spot in research because of its multiple degrees of freedom (DOF) with the capacity to complete various tasks, e.g., repetitive motions [
10], avoidance barriers [
11], and satisfaction of physical limits [
12]. There are many control methods for redundant robot arms, including point-to-point control [
13], continuous trajectory control [
14], force (torque) control [
15], and intelligent control [
16]. Each of these control methods has its own characteristics and can be selected according to different application scenarios. In point-to-point control, the redundant robot arm needs swift and precise adjustment from the current configuration to the target configuration, which is called the configuration amendment (CA). For instance, the robot arm completes the CA before executing point tasks, such as hitting tasks. In addition, before performing a continuous or cyclic motion task, the redundant robot arm’s configuration must be changed to match the appropriate initial configuration. As a result, the CA is crucial to control research and is unavoidable in applications.
Besides the laborsome and inefficient manual operation method, some schemes have been reported through different control techniques to achieve the CA [
17,
18,
19]. For example, in [
17], the CA scheme for redundant robot arms based on Zhang neurodynamics (ZN) with no end-effector task explicitly assigned was proposed. The authors proposed a velocity-layer CA scheme and considered satisfying physical limits of joint angle and joint velocity. However, as the velocity-layer CA scheme showed, the joint-acceleration solution exceeds its constraint because the joint-acceleration constraint is not incorporated into the scheme formulation. The authors in [
19] promoted the velocity-layer scheme and proposed an acceleration-layer CA scheme that satisfies joint-angle-layer, joint-velocity-layer, and joint-acceleration-layer physical limits. However, the redundant robot arm equipped with the above-mentioned conventional acceleration-layer CA scheme may exceed physical limits during tasks in some special situations. The conventional CA schemes mentioned above just considered the time-invariant physical limits. Sometimes, the redundant robot arms are faced with not only time-invariant physical limits but also time-variant physical limits [
20]. Furthermore, the time-invariant physical limits of robot arms may change over time with physical wear and damage. Therefore, the effective CA scheme for redundant robot arms at the joint-acceleration layer with time-variant physical limits is worth developing and investigating.
In the past two decades, the Zhang neurodynamics equivalency (ZNE) method, which originates from ZN, was proposed and proved to efficiently handle some complicated time-variant problems [
21,
22,
23,
24,
25,
26]. It is always used to transform the time-variant problem into a physically mathematically equivalent problem at the derivative layer, as it is beneficial or more convenient to handle the original problem with equivalent effecting. Motivated by [
25], this study investigates two acceleration-layer CA schemes for redundant robot arms by applying the ZNE method. Whether physical limits are time-variant or time-invariant, the proposed acceleration-layer CA schemes designed via the ZNE method can satisfy them simultaneously.
In this study, we optimize the joint-acceleration-layer CA scheme [
19] with the new unified constraint based on theoretical derivation, and we make up for the research gaps about the CA scheme of redundant robot arms with three-layer time-variant physical limits via the ZNE method. To formulate the proposed schemes in standard quadratic programming (QP) form, the acceleration-layer performance indicator is derived by utilizing the equality-type ZNE first. Then, the theorems and corollaries about equivalent transformations of different-layer physical limits are derived by utilizing the inequality-type ZNE, and the unified acceleration-layer bound constraints (related to time-variant and time-invariant physical limits) are obtained and presented. Combined with the acceleration-layer performance indicator and the acceleration-layer unified bound constraint, an enhanced acceleration-layer CA scheme considering three-layer (i.e., angle-, velocity-, and acceleration-layer) time-variant physical limits and a simplified acceleration-layer CA scheme considering three-layer time-invariant physical limits are proposed. Each proposed acceleration-layer CA scheme is reformulated into a QP whose solution is obtained via a projection neurodynamics (PN) solver. The simulative experiments are performed on a four-link planar arm and a six-DOF spatial arm, and the experimental results validate the correctness, effectiveness, and efficacy of the proposed acceleration-layer CA schemes. In addition, comparative experimental results substantiate that the proposed acceleration-layer CA schemes are endowed with superiority with respect to usability and completeness over the acceleration-layer CA scheme in [
19]. The physical experiments are performed, and the results further verify the practicability of the proposed CA schemes.
The rest is organized as follows.
Section 2 presents the requirements of realizing the CA.
Section 3 presents the derivations of two proposed acceleration-layer CA schemes, including the derivations of the acceleration-layer CA performance indicator and unified acceleration-layer bound constraint.
Section 4 describes the proposed CA schemes in the form of QP together with a PN solver, as well as a conventional scheme.
Section 5 presents the simulative and physical experimental results.
Section 6 concludes this study. Notably, this study makes the following main contributions.
Different from assuming that all physical limits are time-invariant in previous studies about CA, time-variant and time-invariant physical limits are both considered, and the three-layer physical-limits satisfaction of redundant robot arms is realized.
Theorems and corollaries for CA schemes are theoretically derived and rigorously proved via the ZNE that includes the equality-type ZNE and the inequality-type ZNE, and they supplement and complete the ZNE theory.
An acceleration-layer performance indicator for the CA is theoretically derived by utilizing the equality-type ZNE, and a new unified acceleration-layer time-variant bound constraint formulated from time-variant physical limits is also obtained by utilizing the inequality-type ZNE. Therefore, an acceleration-layer CA scheme for redundant robot arms is proposed in the form of QP. In addition, a simplified acceleration-layer CA scheme considering time-invariant physical limits is also presented.
Simulative experiments compared with the conventional CA scheme are designed and performed, and the results substantiate the superiority of the proposed CA schemes. Moreover, physical experiments are also carried out. The results further verify the practicability and correctness of the proposed CA schemes.
2. Preliminary and Problem
The forward kinematics equality of redundant robot arms is written as
, where
is the end-effector factual position with
being the joint-angle vector and
being a differentiable nonlinear function. Furthermore, the kinematics equality about the relationship between the derivative of the end-effector position vector
and the derivative of the joint-angle vector
is written as
where
represents the Jacobian matrix. The above equation formulates the redundant robot arm operating at the velocity layer without considering physical limits. When the redundant robot arm with three-layer physical limits operates at the acceleration layer, the requirements of realizing the CA are described as
where the symbol “⩽” means that each element in the left part is less than or equal to the corresponding element in the right part,
denotes the time-variant joint-angle vector, and
denotes the desired joint-angle state (i.e., objective configuration) when time
, with
being the run time. Furthermore,
and
denote the time-variant joint-velocity vector and joint-acceleration vector, respectively. In addition,
,
, and
are the time-variant upper and lower limits of
,
, and
, respectively. The problem cannot be easily solved because there are three different-layer inequality constraints, (
2), (
3), and (
4).
5. Experiments, Verification, and Comparisons
In this section, simulative experiments based on two kinds of redundant robot arms (i.e., the four-link planar arm and the UR3 spatial arm) are conducted, and the results are presented to substantiate the superior performance of the proposed acceleration-layer CA schemes.
Note that the simulative experiments are based on the fact that redundant robot arms are always constrained by physical limits. In the simulative experiments, we consider two cases. Firstly, the constraints are loose. We refer to the redundant robot arm having loose constraints in this study if the redundant robot arm is far from reaching the physical limits when carrying out a certain task. The simulative results are the same as those synthesized by the redundant robot arm without considering the constraints in [
19]. Secondly, some constraints are tight. When the redundant robot arm may reach physical limits due to hardware damage or other reasons, it is referred to as having tight constraints.
5.1. Application to Four-Link Planar Arm
In this subsection, three groups experiments based on four-link planar arm are conducted and their results are presented.
5.1.1. Experiment Group 1
In this part, the time-invariant upper and lower limits are considered first, and the SALCA scheme (
24)–(
28) and CALCA scheme (
29)–(
33) are used to perform the CA tasks based on the four-link planar arm.
This group of simulative experiments is conducted with almost the same constraints and parameters as those in [
19]. Specifically, the length of each link is set to 1.2 m, the simulation duration time
T is set to 5 s, and the joint constraints are fixed as follows.
The initial configuration and desired configuration for the four-link planar arm are also, respectively, selected as
rad and
rad. In addition, the other parameters are set as
,
, and
that keep the same values in all simulative experiments.
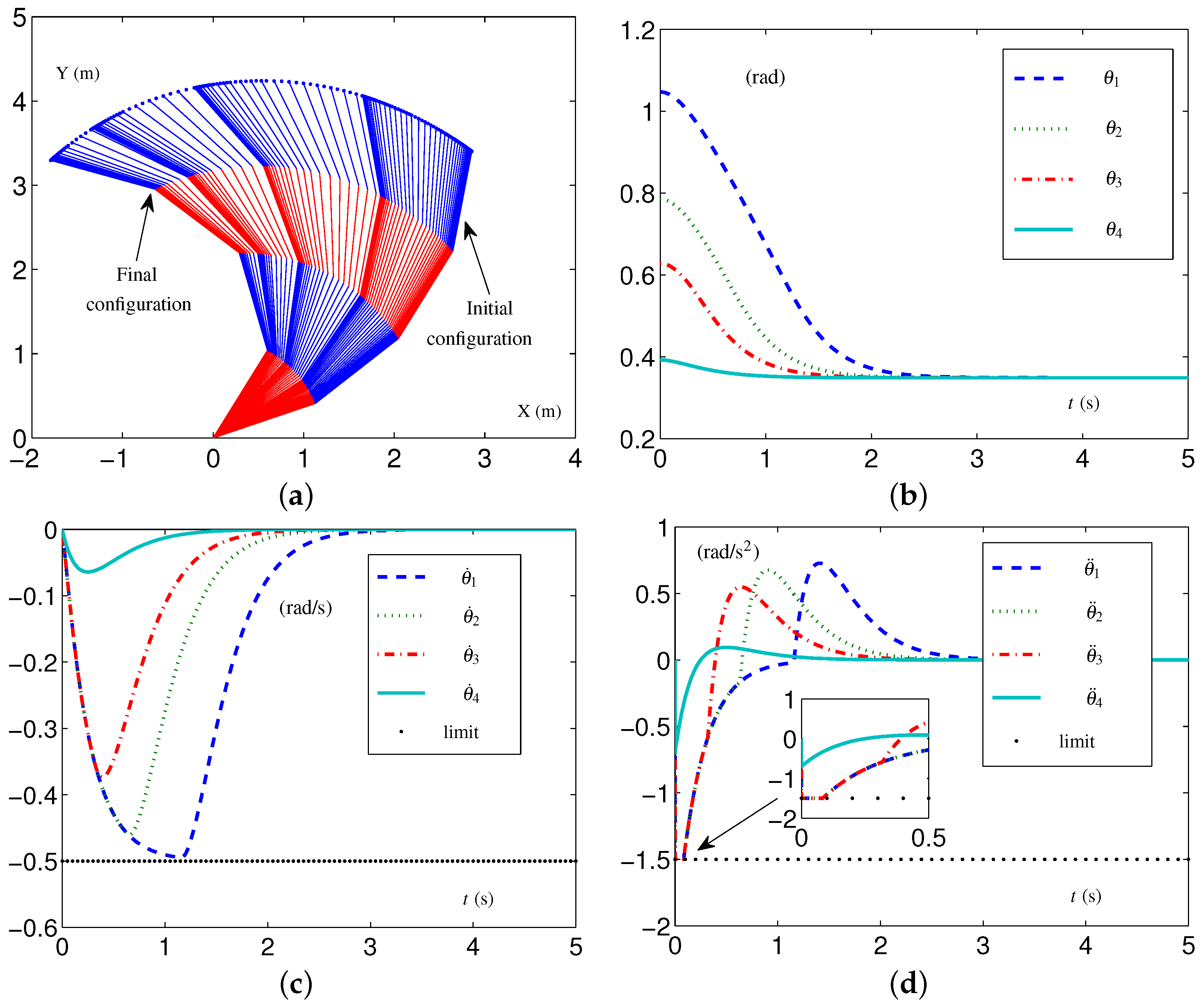
Based on these data, the specific formulations of the SALCA scheme (
24)–(
28) are obtained. The related simulative results are depicted in
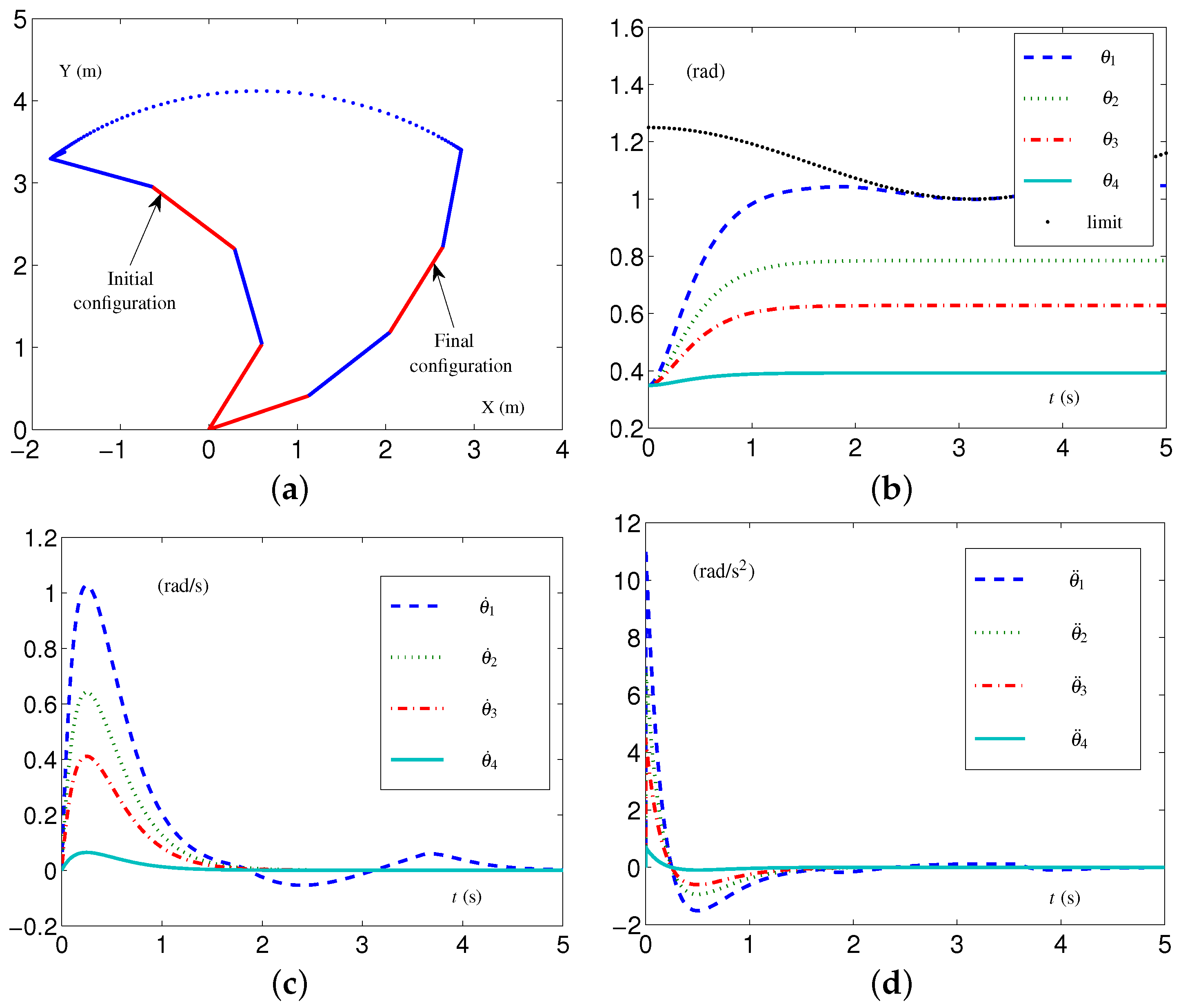
Figure 2. The four-link planar arm with initial configuration and desired configuration labeled is depicted in
Figure 2a. Note that the configurations of the redundant robot arm in
Figure 2a are depicted using two alternating colors (i.e., red and blue) for enhanced clarity. The use of two colors to depict the configurations is consistently applied throughout the study. The trajectories of
,
, and
are depicted in
Figure 2b through
Figure 2d. From
Figure 2c,d, one sees that the four-link planar arm is in the tight-constraint case regarding the velocity layer and acceleration layer, while the values of
and
all keep within the allowed range and satisfy the constraints.
Furthermore, the vector
is defined as
to indicate the effect of schemes, and its
ith element is the value of
with
. The vector
shows the configuration difference between the final configuration
and the desired configuration as
. The configuration difference is obtained in this simulation, i.e.,
rad, which is almost the same as the value obtained by the CALCA scheme (
29)–(
33) in [
19]. Those simulative results show that the proposed SALCA scheme (
24)–(
28) is effective, as is the CALCA scheme (
29)–(
33) under those conditions.
In addition, the EALCA scheme (
19)–(
23) is investigated on a four-link planar arm. The time-variant loose constraints are set as follows: each element in
,
, and
is set as
rad,
rad/s, and
rad/s
, respectively; each element in
,
, and
is
rad,
rad/s, and
rad/s
, respectively. The four-link planar arm is far from reaching the time-variant physical limits during the CA task when it has the above constraints. For maintaining clarity and improving readability, we name these time-variant loose-constraint settings as TVLC settings.
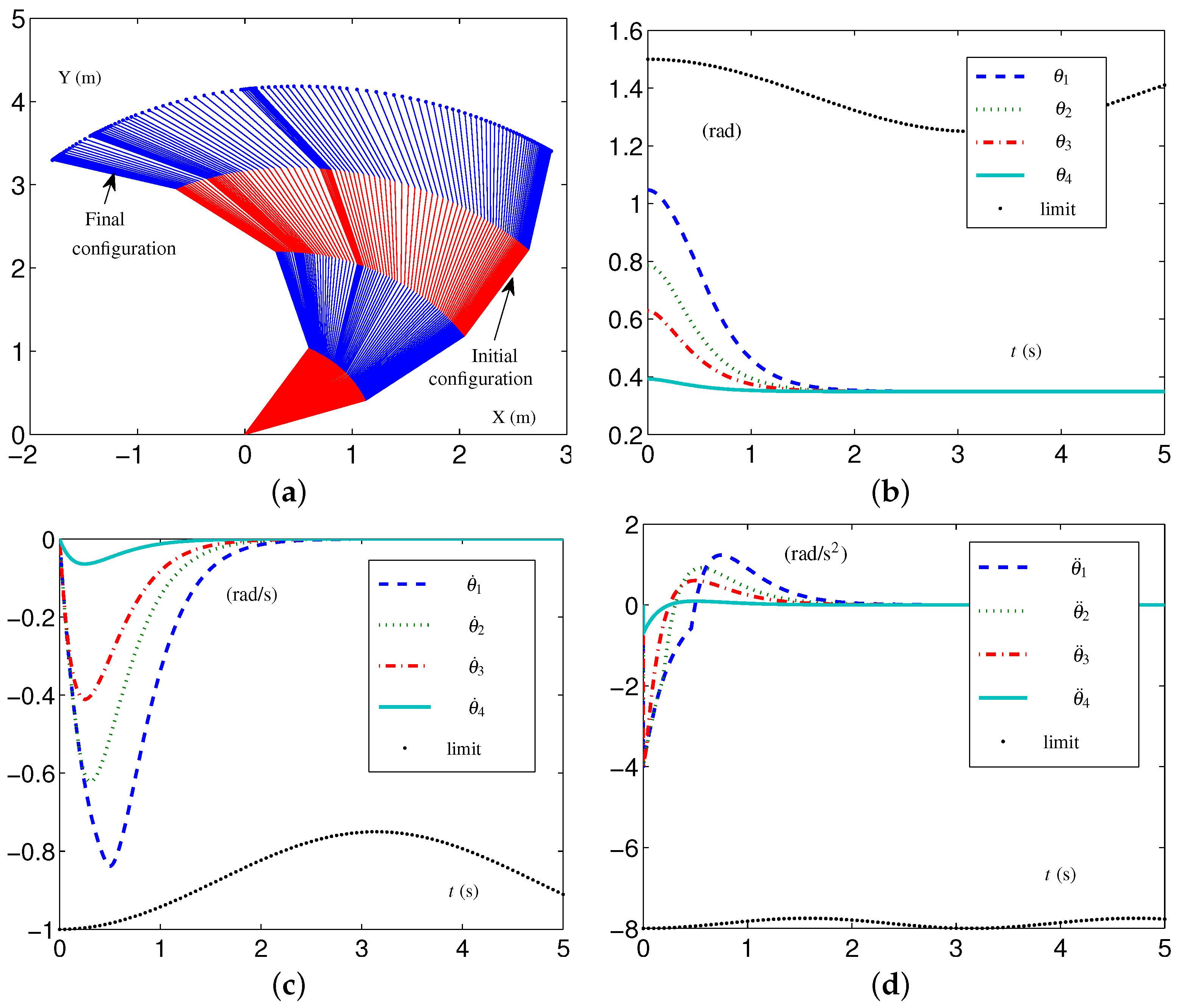
When the four-link planar arm has TVLC settings, except for each element in
and
being, respectively, changed to
rad/s and
rad/s
, simulative experiments are conducted to confirm the efficacy of the EALCA scheme (
19)–(
23). The initial configuration is
and the desired configuration is
. The related simulative results are depicted in
Figure 3. From the trajectories of the variables, one obtains that the four-link planar arm equipped with the EALCA scheme (
19)–(
23) completes the task effectively in the tight-constraint case regarding the velocity layer and acceleration layer, and the different-layer physical limits are satisfied. The configuration difference
rad shows that the task is completed with high quality.
5.1.2. Experiment Group 2
This group of simulative experiments is performed with the initial configuration being and the desired configuration . That is to say, the values of the initial configuration and the desired configuration (used in Experiment Group 1) exchange, and the four-link planar arm returns to the original position from the present position after the first CA simulation.
The CALCA scheme (
29)–(
33) is investigated with the time-invariant loose constraints being fixed as follows: each element in
,
, and
is set as
rad, 10 rad/s, and 15 rad/s
, respectively; each element in
,
, and
is
rad,
rad/s, and
rad/s
, respectively. We coherently name these time-invariant loose-constraint settings as TILC settings. In addition, each parameter in vector
ℸ is
; parameters
, and
. The related simulative results are depicted in
Figure 4, which shows that the four-link planar arm equipped with the CALCA scheme (
29)–(
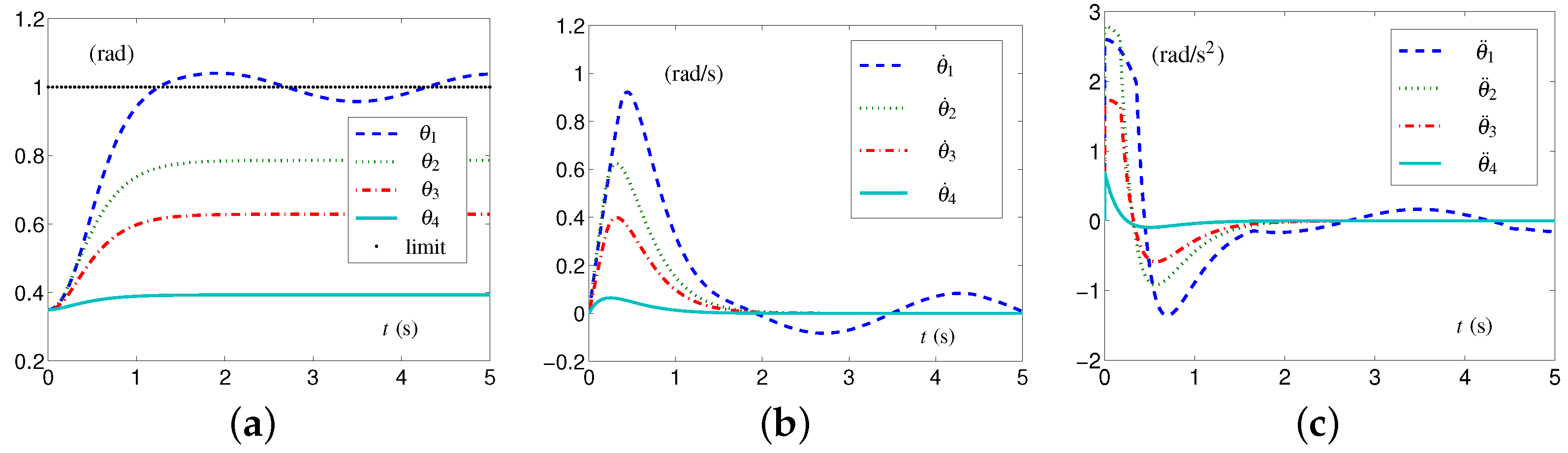
33) completed the task successfully. However, when each element in vector
decreases from
rad to
rad, i.e., the four-link planar arm performs the CA task in the tight-constraint case regarding the angle layer, there is an undesirable situation. The simulative results are depicted in
Figure 5. From
Figure 5a, one sees that the values of
exceed the joint-angle upper limit, and the four-link planar arm may be damaged or damaged further.
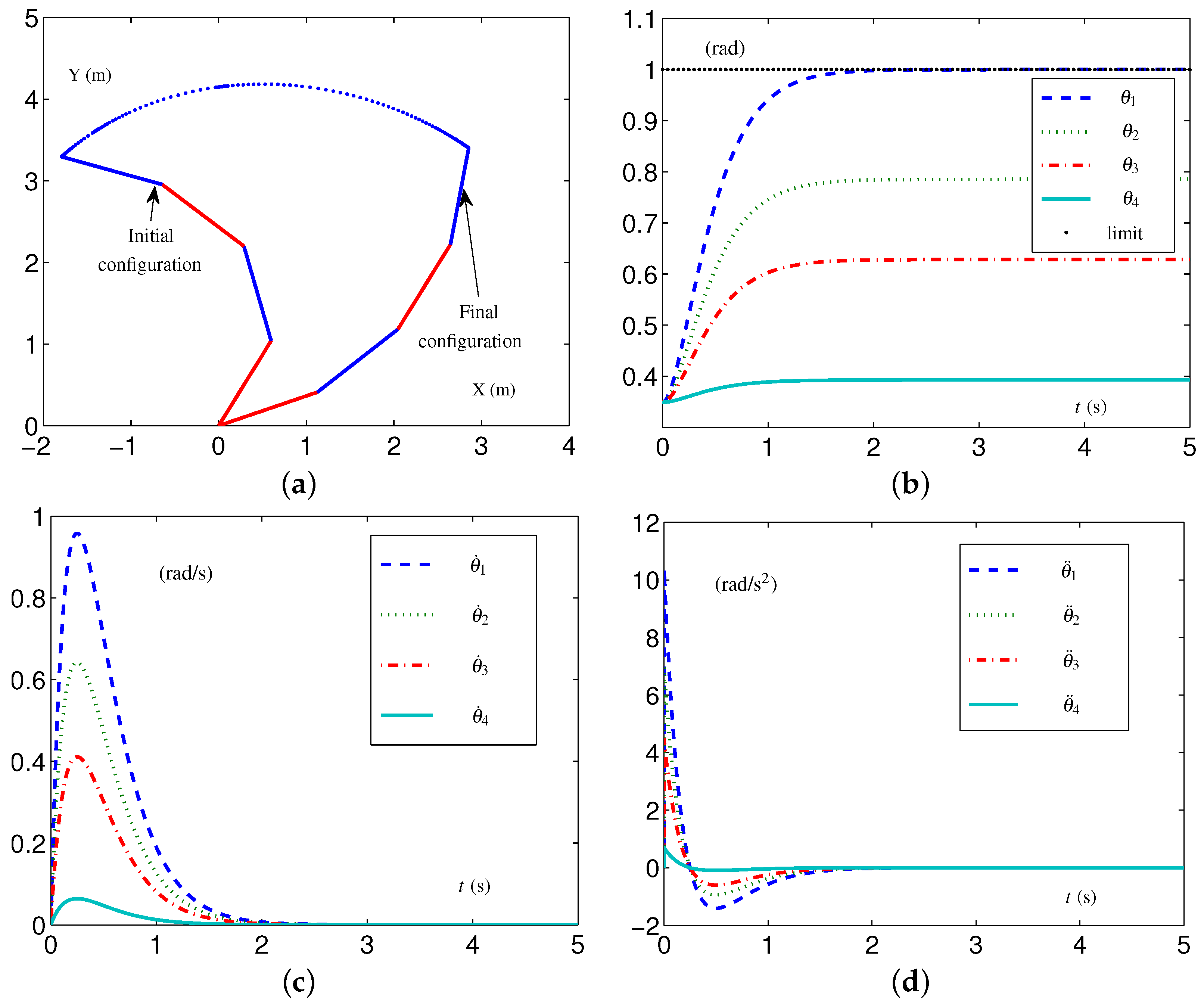
The SALCA scheme (
24)–(
28) is investigated to perform the CA task with the same tight constraints as mentioned above. The simulative results are shown in
Figure 6. One obtains that the values of
do not exceed the joint-angle upper limits, as shown in
Figure 6b, and the values of
and
all keep within the allowed range, as shown in
Figure 6c,d. The configuration difference
rad is obtained. That is to say, the four-link planar arm equipped with the SALCA scheme (
24)–(
28) completes the CA with all physical limits satisfied.
In addition, the EALCA scheme (
19)–(
23) is also investigated with TVLC settings except for each element in
being set as
rad. As shown in
Figure 7, the four-link planar arm equipped with the EALCA scheme (
19)–(
23) completes the task with all physical limits satisfied. The configuration difference
,
,
rad is obtained. This group comparative simulation verifies that the proposed acceleration-layer CA schemes are effective and have superiority compared with the conventional CA scheme in some cases.
5.1.3. Experiment Group 3
This group of simulative experiments is performed with the tight velocity-layer and acceleration-layer physical limits. The TVLC settings are considered, except for each element in
and
being, respectively, set as
rad/s and
rad/s
. The initial configuration
and the desired configuration
. The simulative results synthesized by the EALCA scheme (
19)–(
23) are shown in
Figure 8. From
Figure 8a,b, one sees that the four-link planar arm equipped with the EALCA scheme (
19)–(
23) completes the task with all physical limits satisfied. The corresponding configuration difference is
rad. To verify the effectiveness of the SALCA scheme (
24)–(
28), the TILC settings are considered except for
and
being, respectively, set as 1 rad/s and
rad/s
. The simulative results are displayed in
Figure 8c,d. From the figure, one sees that the four-link planar arm equipped with the SALCA scheme (
24)–(
28) also completes the task with all physical limits satisfied. In addition, the corresponding configuration difference is
rad.
To sum up, in those three groups of simulative experiments, the four-link planar arm equipped with the proposed acceleration-layer CA schemes all successfully complete the CA task with all physical limits satisfied, which verifies the efficiency and effectiveness of the proposed CA schemes.
5.2. Application to UR3 Spatial Arm
In this subsection, three group experiments based on the UR3 spatial arm are conducted and their results are presented.
5.2.1. Experiment Group 4
As a typical redundant robot arm, the UR3 spatial arm has six DOF and works in three-dimensional space. In this subsection, the UR3 spatial arm is simulated to complete the CA for experimental verification. The Denavit–Hartenberg (D–H) parameters of the UR3 spatial arm are presented in
Table 1.
This group of simulative experiments is performed in a loose-constraint case. For clarity, the TVLC settings and TILC settings are defined first. When the EALCA scheme (
19)–(
23) is applied, the TVLC settings for the UR3 spatial arm are investigated: each element in
,
, and
is
rad,
rad/s, and
rad/s
, respectively. When the SALCA scheme (
24)–(
28) is applied, the TILC settings for the UR3 spatial arm are investigated:
rad and
rad; each element in
and
is
rad/s and
rad/s
, respectively.
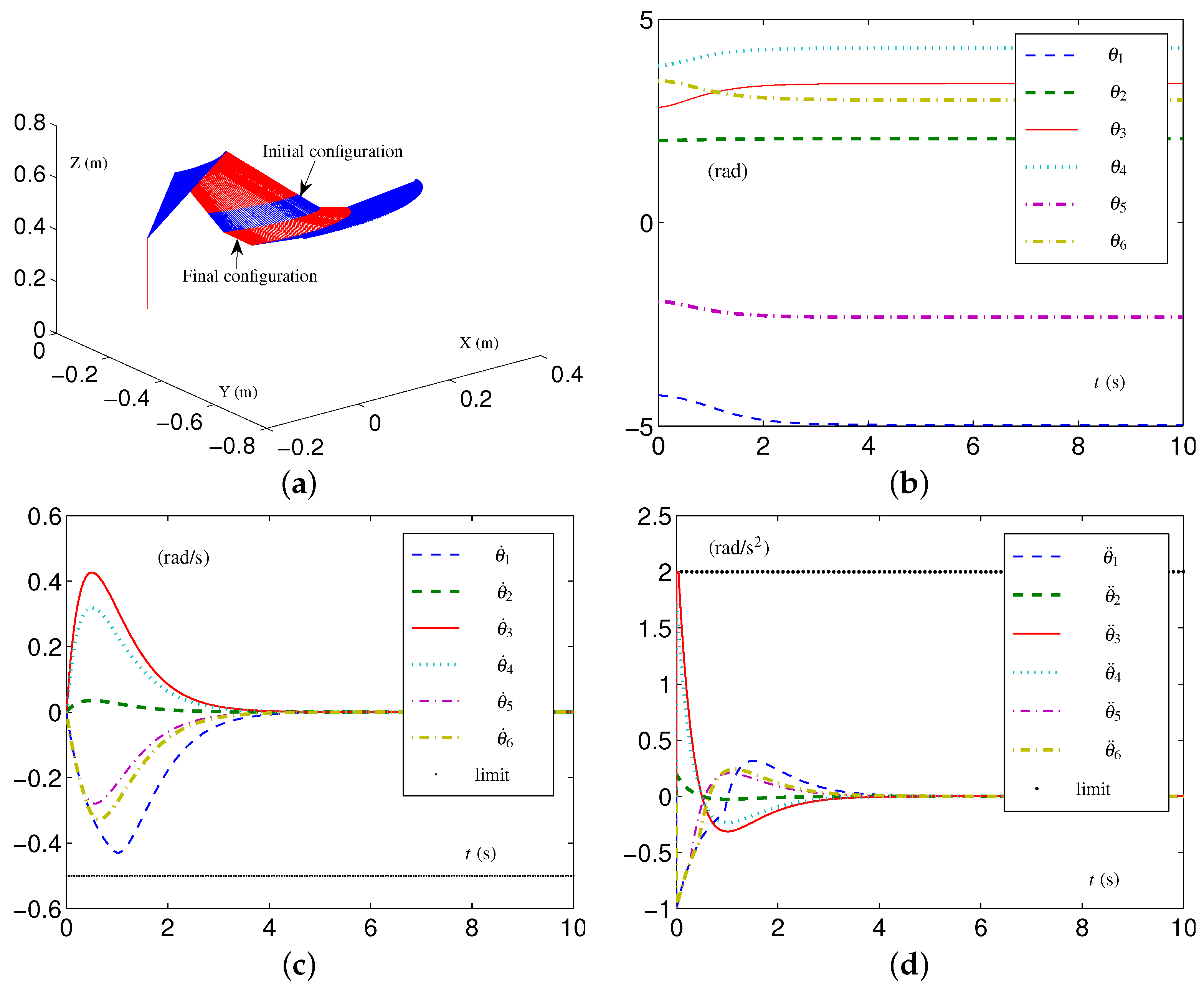
The initial configuration
is set as
rad, and the desired configuration is set as
rad. The simulative results synthesized by the EALCA scheme (
19)–(
23), with the TVLC settings for the UR3 spatial arm, are presented in
Figure 9. It can be seen from
Figure 9a that the CA task is performed very well, and one sees that all joint variables satisfy the physical limits during the CA task. The configuration difference
rad is obtained. In addition, the UR3 spatial arm equipped with the SALCA scheme (
24)–(
28), with the TILC settings for the UR3 spatial arm, also completes the CA task well; these results are omitted due to the limitations of this study.
5.2.2. Experiment Group 5
In this group of experiments, the UR3 spatial arm equipped with the proposed CA scheme performs the CA task with tight velocity-layer and acceleration-layer physical limits, similar to Experiment Group 3. The initial configuration
and desired configuration
. When the EALCA scheme (
19)–(
23) is applied, the TVLC settings for the UR3 spatial arm are set except for each element in
and
being
rad/s and
rad/s
, respectively. When the SALCA scheme (
24)–(
28) is applied, the TILC settings for the UR3 spatial arm are set except for each element in
and
being set as
rad/s and
rad/s
, respectively.
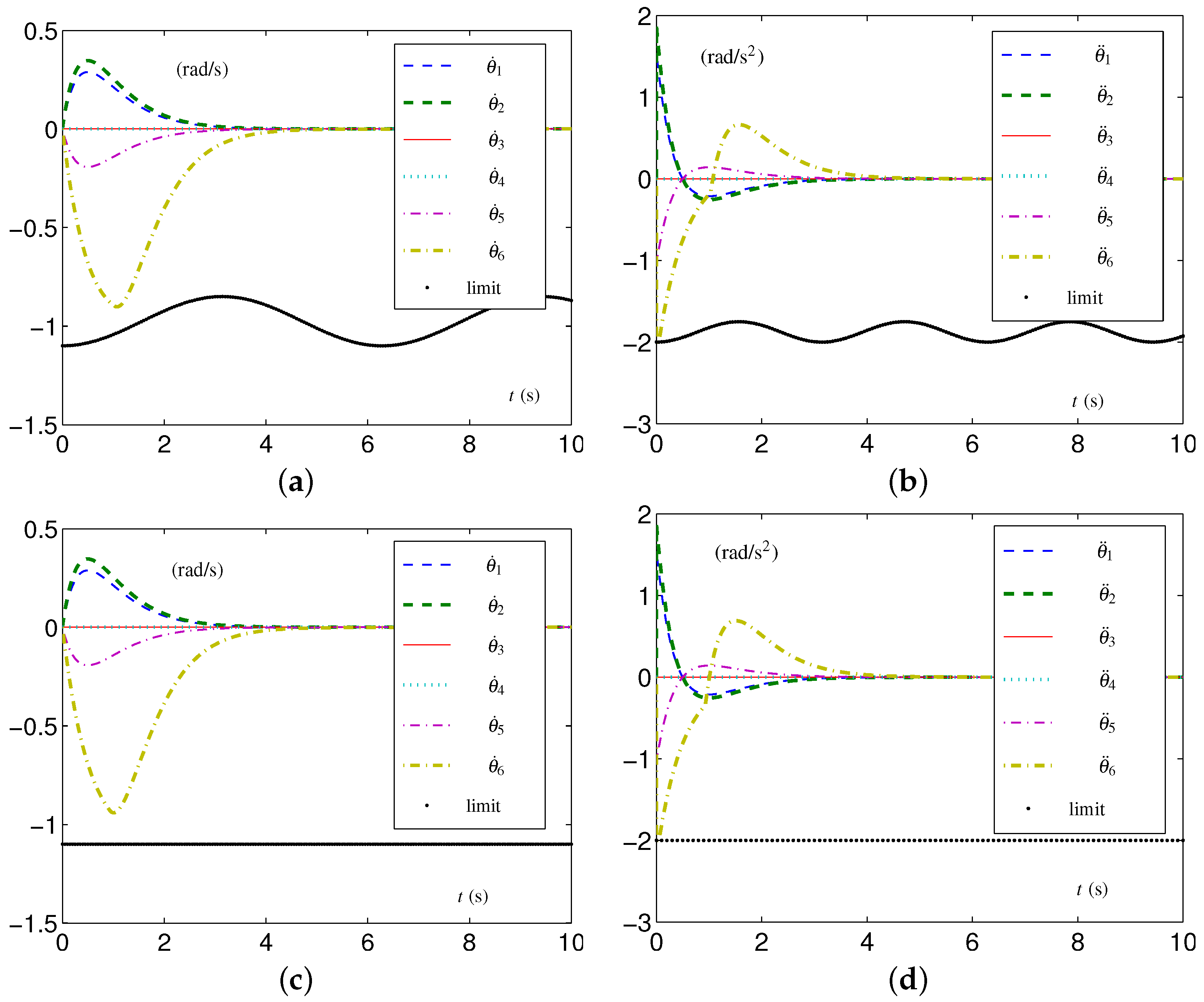
The simulative results of joint velocities and joint accelerations synthesized by the EALCA scheme (
19)–(
23) are presented in
Figure 10a,b. The corresponding configuration difference
rad is obtained.
Figure 10c,d describe the results synthesized by the SALCA scheme (
24)–(
28) and display the trajectories of joint velocities and joint accelerations, respectively. The configuration difference of
rad is obtained.
In comparing the results with those synthesized with the TVLC settings for the UR3 spatial arm shown in
Figure 9, we evidently see that the value of
in
Figure 9c is smaller than
rad/s at near
s, while the values of
in
Figure 10a,c are kept within velocity-layer constraints. In addition, the value of
in
Figure 10d is smaller than
rad/s at the beginning of the experiment, while the values of
in
Figure 10b,d are kept within acceleration-layer constraints. The configuration differences do not increase even if the UR3 spatial arm has tight multilayer constraints. All configuration difference are of order
, as are those synthesized with loose physical limits. The results shown in
Figure 10 verify the effectiveness of the proposed acceleration-layer CA schemes under those conditions.
5.2.3. Experiment Group 6
To further verify the effectiveness of the proposed CA schemes, we conduct a sixth group of simulative experiments with the UR3 spatial arm equipped with the proposed CA schemes and conventional CA scheme. Again, we exchange the initial configuration and the desired configuration in Experiment Group 5, i.e., the initial configuration , and the desired joint-angle vector is set as .
When the EALCA scheme (
19)–(
23) is applied, the TVLC settings for the UR3 spatial arm are set except for each element in
and
being
rad/s and
rad/s
, respectively. When either the SALCA scheme (
24)–(
28) or CALCA scheme (
29)–(
33) is applied, the TILC settings for the UR3 spatial arm are set except for each element in
and
being set as
rad/s and 2 rad/s
, respectively.
Comparative simulative experiments with tight velocity-layer and acceleration-layer physical limits are performed. All tasks are effectively completed with physical limits satisfied. Due to space limitations, the simulative results in the form of a figure are omitted here, while the configuration differences are displayed in
Table 2. From the data in the table, three schemes are generally effective, the accuracy of task completion is basically consistent, and the SALCA scheme (
24)–(
28) has comparative advantages.
In summary, three groups of simulative experiments are performed based on the UR3 spatial arms equipped with the proposed CA schemes. The constraints in Experiment Group 4 are loose, while the constraints in Experiment Group 5 and Experiment Group 6 are tight at the velocity layer and acceleration layer, exchanging the initial configuration and desired configuration. The results show that the proposed CA schemes have superiority compared with the conventional CA scheme.
5.3. Physical Experiments
This section presents the application of the EALCA scheme (
19)–(
23) and SALCA scheme (
24)–(
28) to a real Kinova Jaco2. The Kinova Jaco2 arm has six DOF, and its angle limits are obtained as
rad and
rad. Two simulations are performed first based on a simulated Kinova Jaco2 arm to guarantee experiment safety. This arm equipped with the SALCA scheme (
24)–(
28) wants to perform the CA task having tight velocity-layer and acceleration-layer physical limits. The corresponding constraints, as well as the initial configuration
and desired configuration
, are given as below.
The corresponding results, which are presented in
Figure 11, indicate that the joint configuration is adjusted automatically and successfully by the SALCA scheme (
24)–(
28). Specifically,
Figure 11c shows that each joint velocity value remains within their limited region [
] m, and
Figure 11d shows that each joint acceleration value remains within their limited region [
] m.
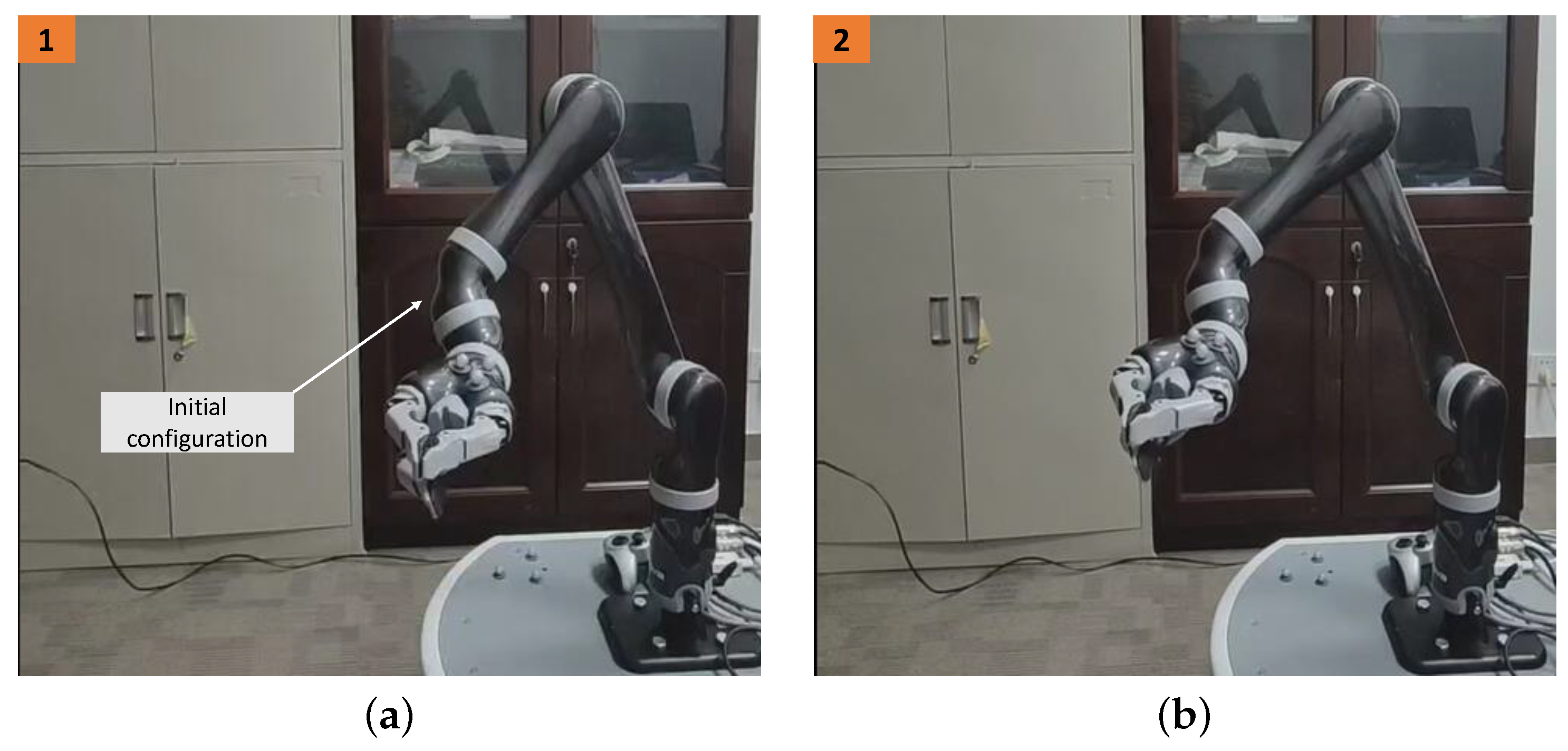
The physical experiment on the Kinova Jaco2 arm equipped with the SALCA scheme (
24)–(
28) is performed, and the results are displayed in
Figure 12. The snapshots in
Figure 12a,d, respectively, show the initial and final configurations of the arm, and the snapshots in
Figure 12b,c are the process pictures of the CA. The arm successfully completes the CA task. Additionally, the EALCA scheme (
19)–(
23) is also investigated based on the Kinova Jaco2 arm, and the CA task is also completed successfully. The experimental results are similar, so they are not presented in this study. In summary, the physical experiments of the CA further verify the effectiveness and practicability of the proposed CA schemes.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}