
Biomimetic Design of Soil-Engaging Components: A Review



Abstract
1. Introduction
2. Biomimetic Soil-Engaging Components
2.1. Low-Resistance Biomimetic Components
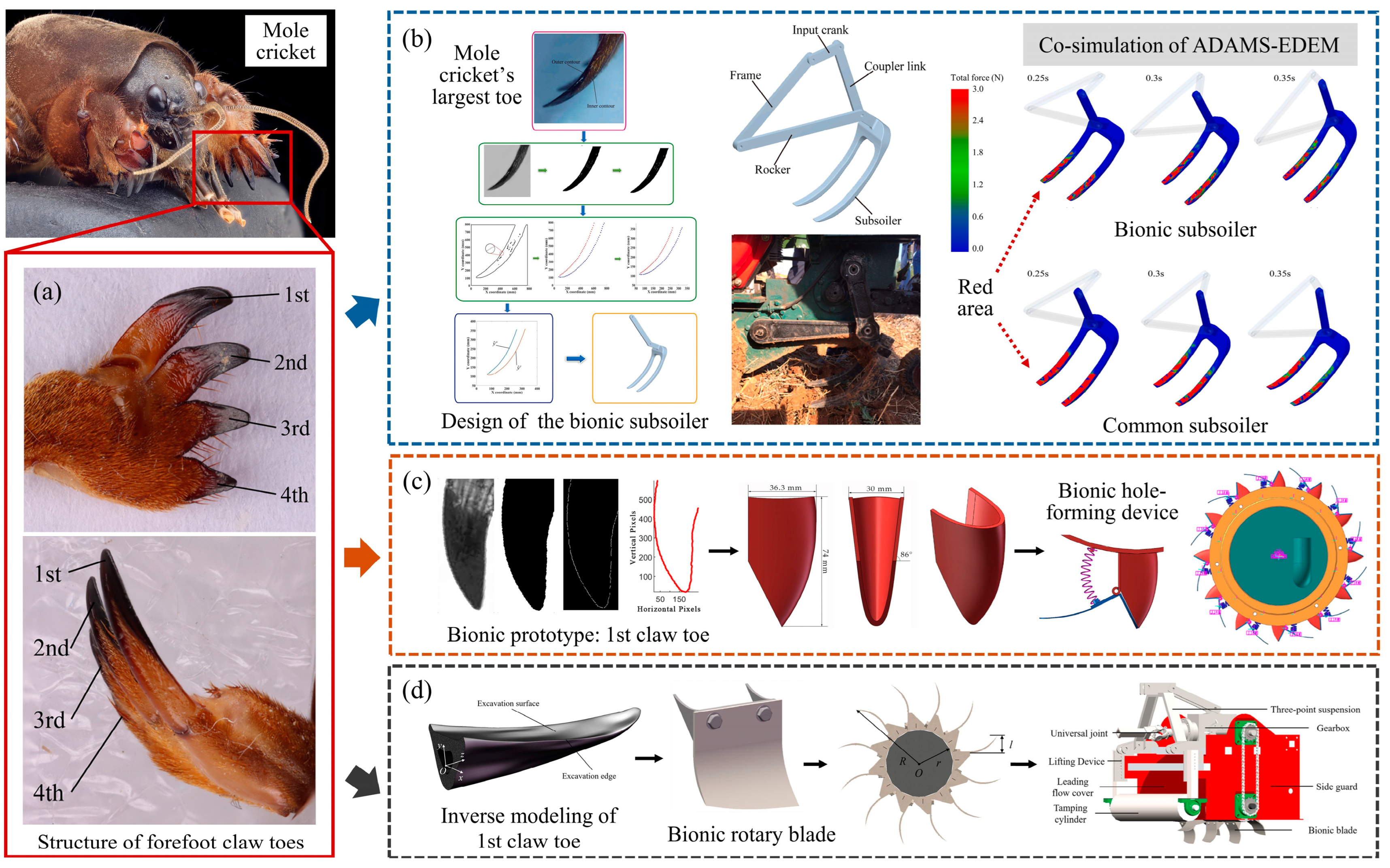
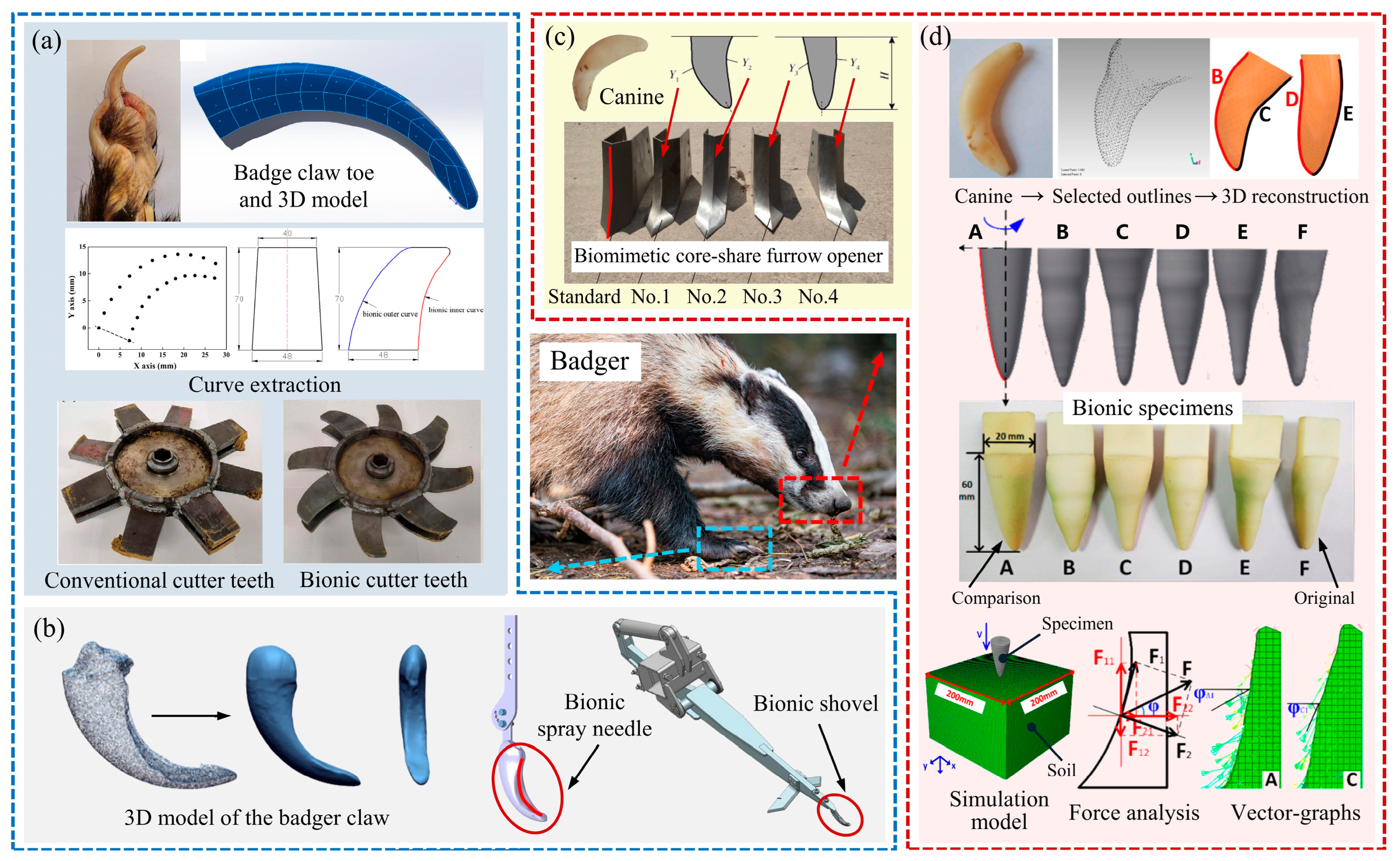
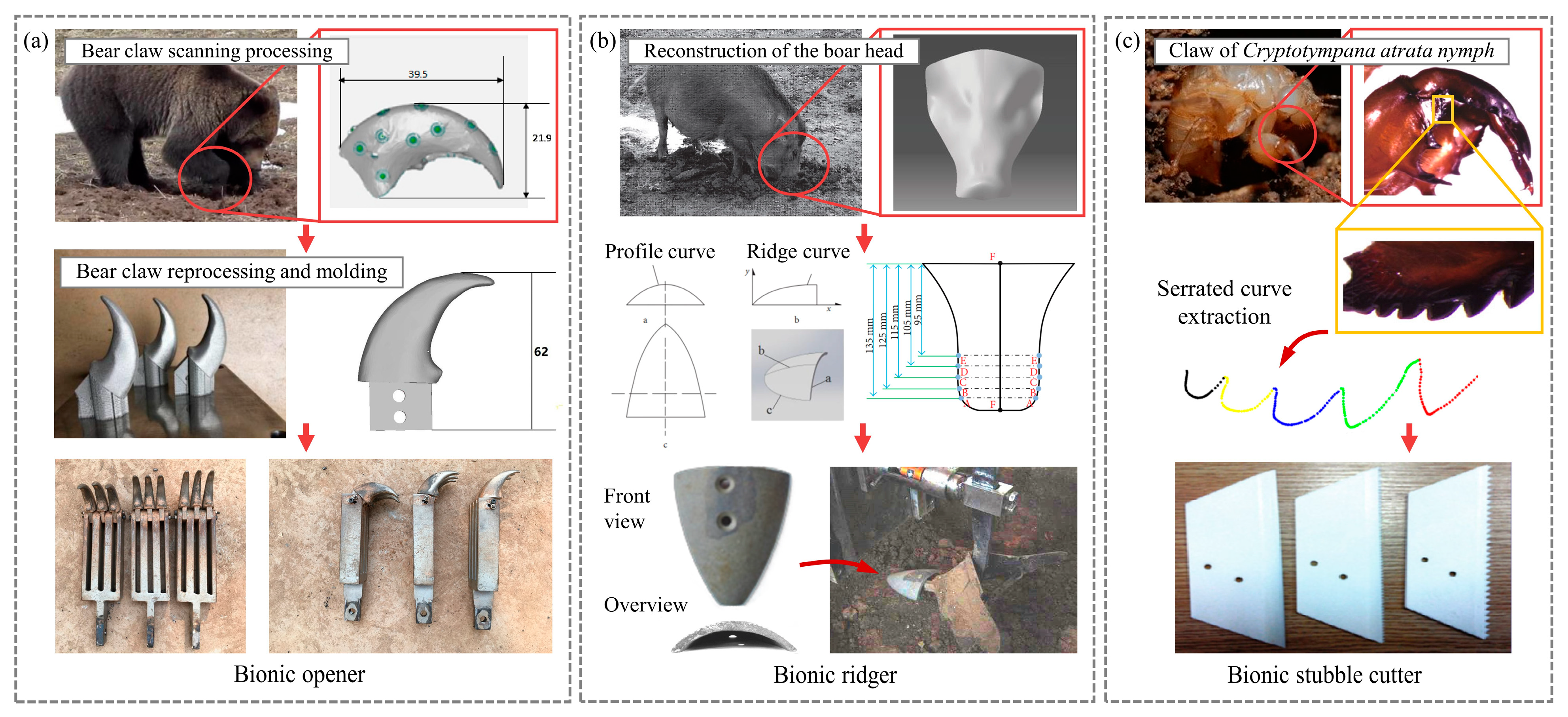
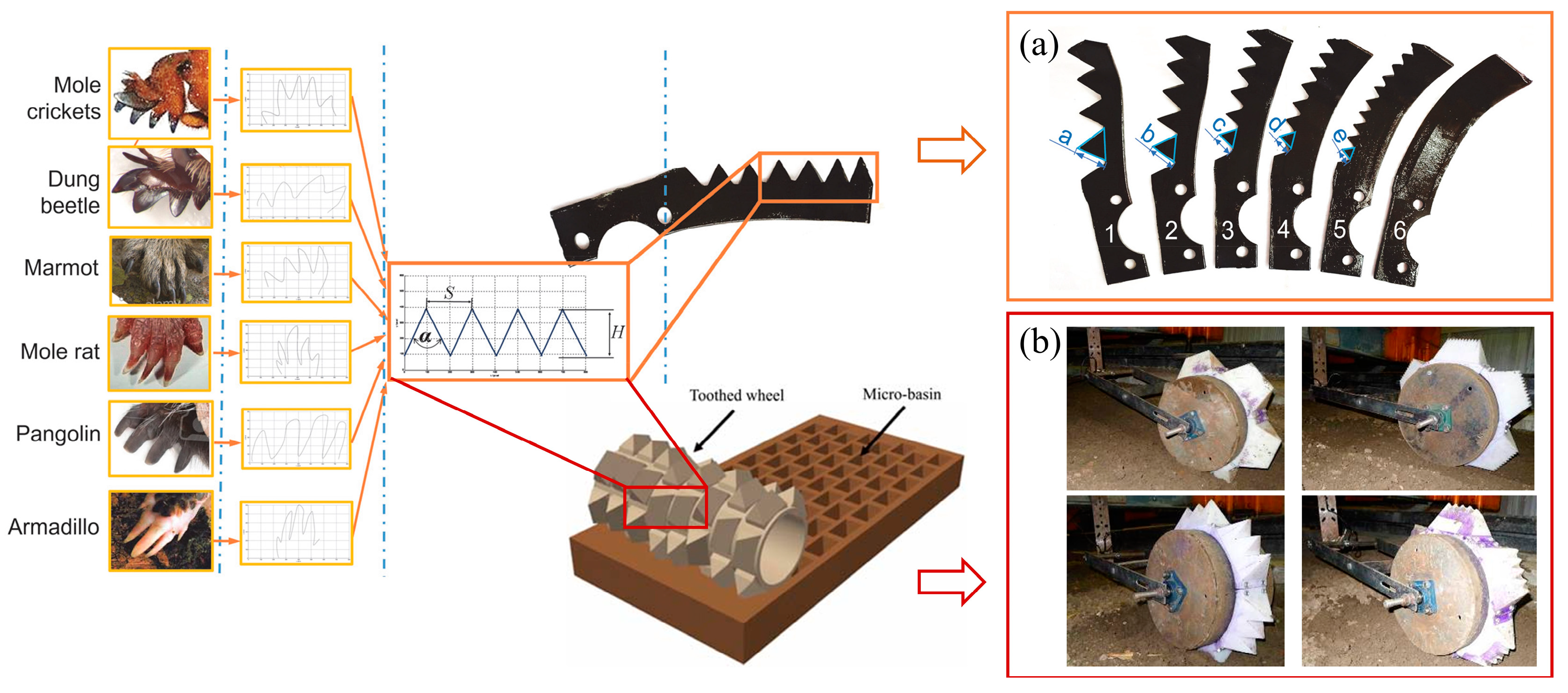
2.1.1. Components Inspired by Biological Structures

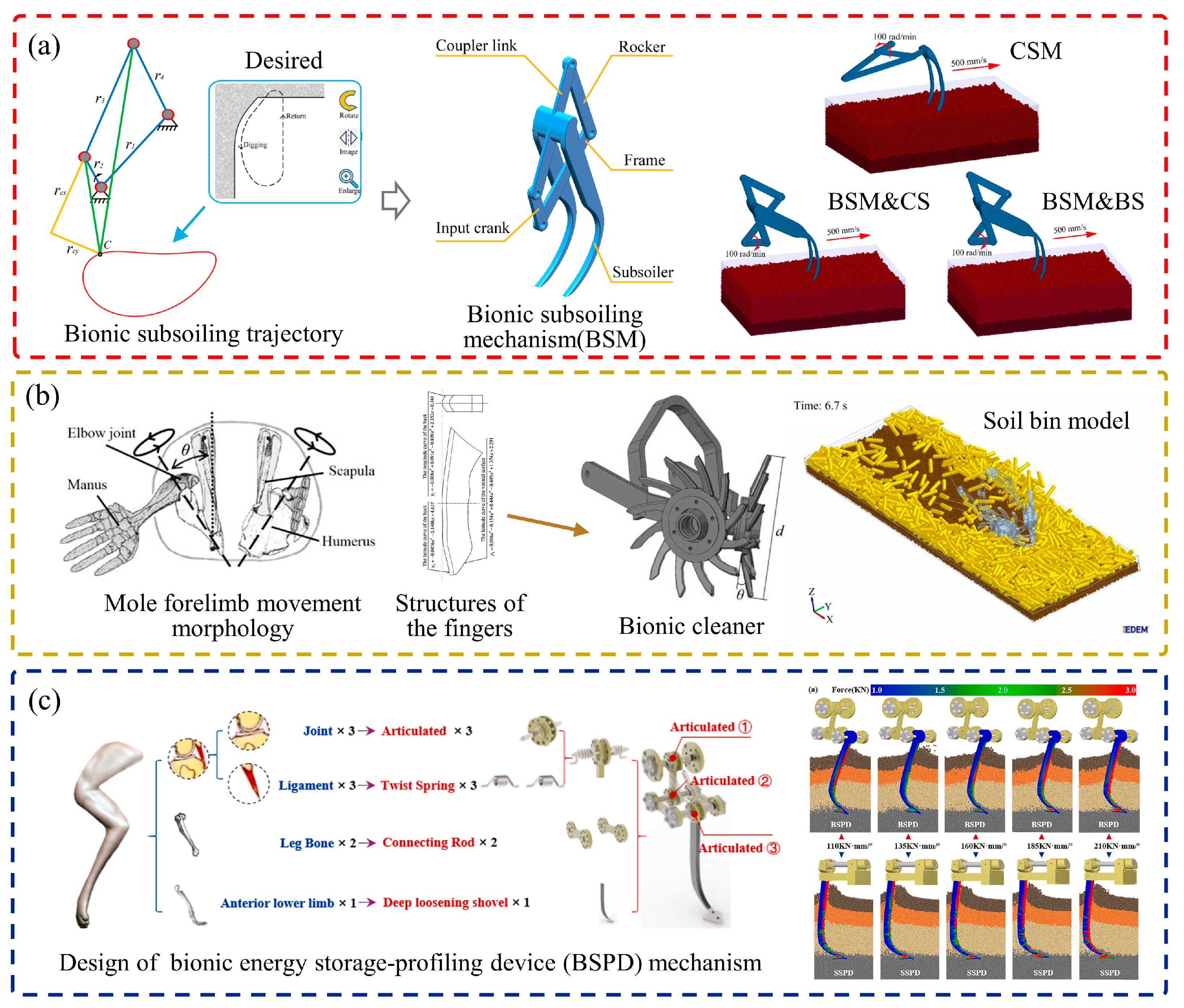
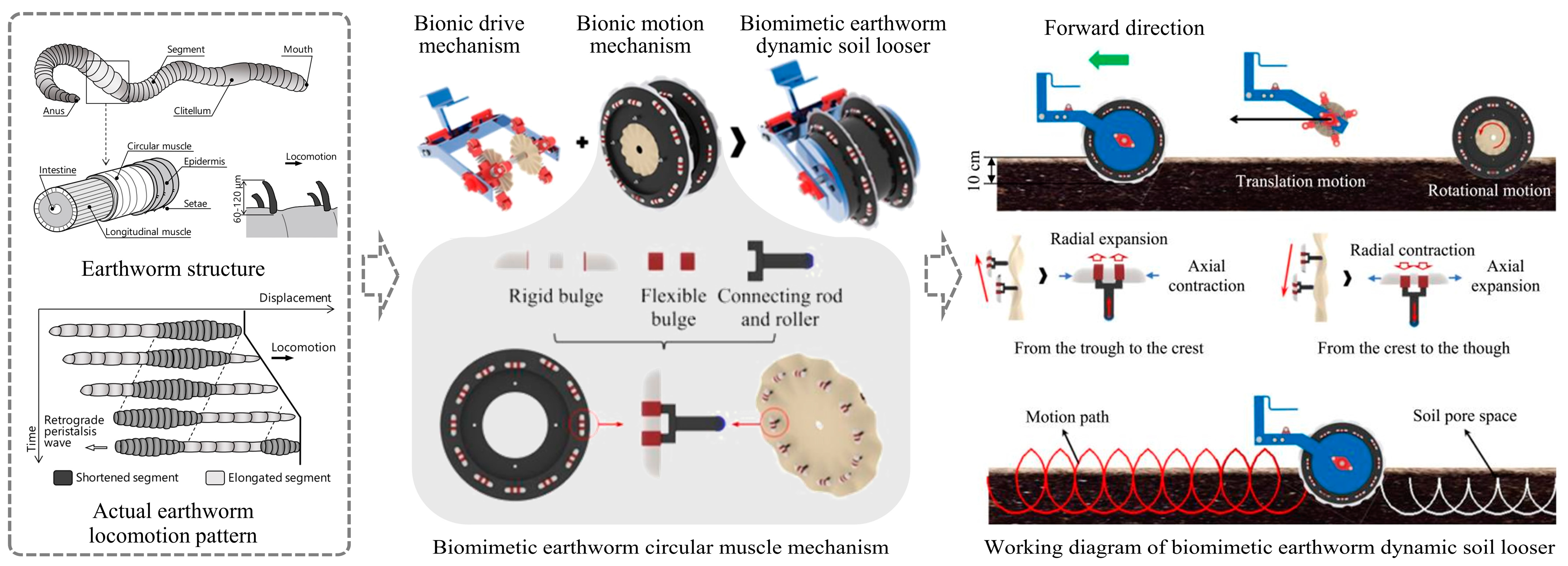
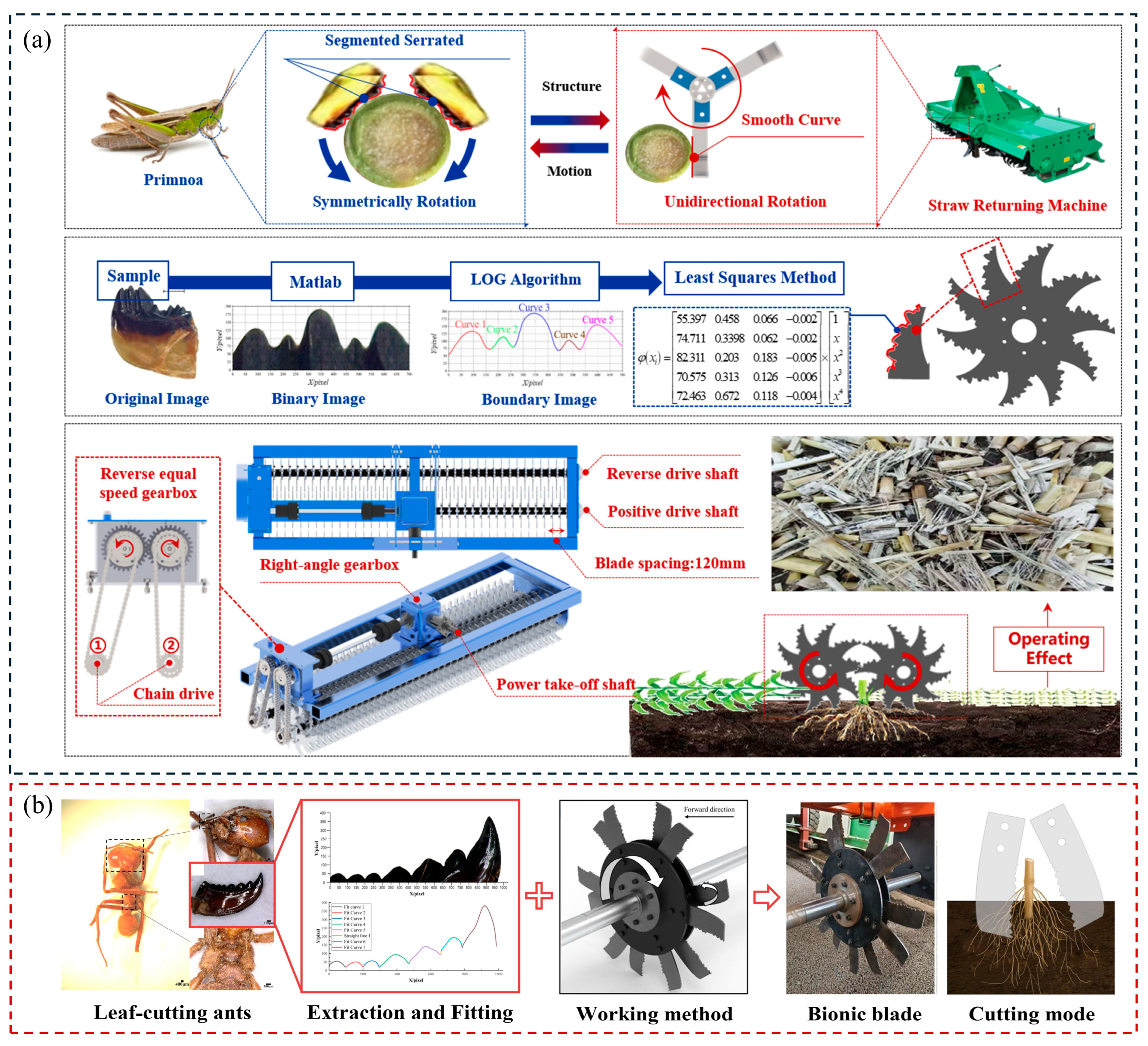
2.1.2. Components Inspired by Creature Movements
2.1.3. Chapter Summary
- The biomimetic design of the morphology and structure is convenient, efficient, and requires minimal alteration to the production process of soil-engaging components, making it the primary method for addressing draught reduction challenges;
- Research on reducing the resistance of soil-engaging components by mimicking organism movement is limited. This is primarily due to the challenges associated with obtaining motion parameters from biological organisms. Factors such as the habits of the organisms and the experimental environment can influence the data accuracy. In addition, moving components require additional energy to drive, provided by fuel or electricity. Such bionic components may result in reduced component resistance but increased total energy consumption, which is worth considering [95]. Nevertheless, the resistance reduction characteristics of biological motion deserve further exploration in this area. They serve as valuable inspiration for the creation of low-resistance components with enhanced performance.
- Scholars have conducted more research on biomimetic draught reduction in soil-engaging components, which represents a current research focus. Mimicking the excellent characteristics of living creatures and applying them to soil-engaging components, it shows a satisfactory performance in tests. The bionic prototypes of bionic low-resistance soil-engaging components are diverse, particularly in regard to soil animals. However, the differences in size and material between these animals and components are enormous. Therefore, the differences in needs and conditions between biological and engineered systems must be carefully considered when designing biomimetic soil-engaging components.
2.2. Anti-Adhesion Biomimetic Components
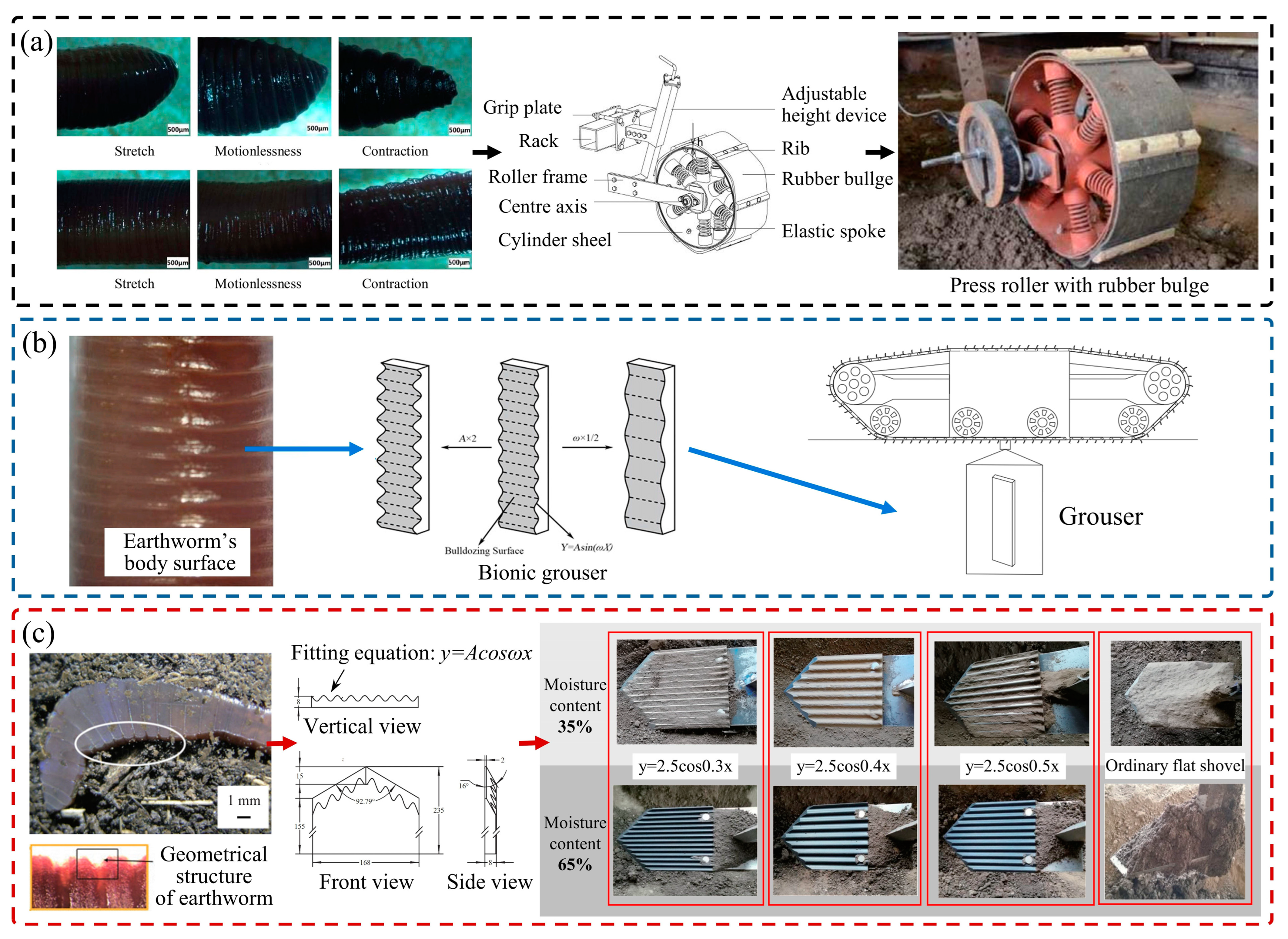
2.2.1. Components Inspired by Biological Non-Smooth Surfaces
2.2.2. Components with Coupling Bionic Design
2.2.3. Chapter Summary
- The non-smooth surface of soil animal bodies has good anti-adhesion properties. Soil-engaging components designed according to the bionic prototype makes the soil−tool interaction on the surface of the components similar to those of the soil animals. Such components effectively reduce soil adhesion by reducing the contact area and disrupting the continuity of the water film;
- Coupling bionics open up new ideas for the design of soil-engaging components that reduce soil adhesion. Coupling bionics combines materials, structures, forms, and functions to achieve synergic effects. Despite the increased complexity, this approach further enhances the anti-adhesion effect, as shown in Table 2. By coupling bionic design methods, the soil-engaging components for a wide range of operating conditions can be developed, which provides a broader perspective for their development.
- Bionic soil-engaging components can reduce soil adhesion, but their effect is often determined by soil conditions and has a limited scope of application. Meanwhile, biomimetic non-smooth structures also place higher requirements on the processing and manufacturing of components. Therefore, it is necessary to conduct further research to improve the applicability and engineering application value of bionic design.

| Bionic Prototype | Components | Bionic Design | Components Performance | Ref. |
|---|---|---|---|---|
| Dung beetle | Bulldozer blade | Convex structure | Adhesion mass↓ | [104] |
| Press roller | Ridge structure | Adhesion mass 52.78%↓ | [105] | |
| Resistance 28.66%↓ | ||||
| Disc | Convex structure | Normal adhesion force 7–18%↓ | [108] | |
| Ground beetle | Press Roller | Convex hull structure | Adhesion mass 51.2%↓ | [109] |
| Slip rate 62.5%↓ | ||||
| Earthworm | Press roller | Rubber bulge structure | Adhesion mass 37.62%↓ | [111] |
| Digging shovel | Ripple structure | Soil adhesion↓ Fuel consumption 17.15%↓ Drag resistance 14.45%↓ | [114] | |
| Soil animals | Penetration head | Convex/Concave structure | Jacking force 18.7%↓ Adhesion resistance↓ | [119] |
| Dung beetle | Plate | UHMWPE | Adhesion force 10.54%↓ | [123] |
| Convex structure and UHMWPE | Adhesion force 28.56%↓ | |||
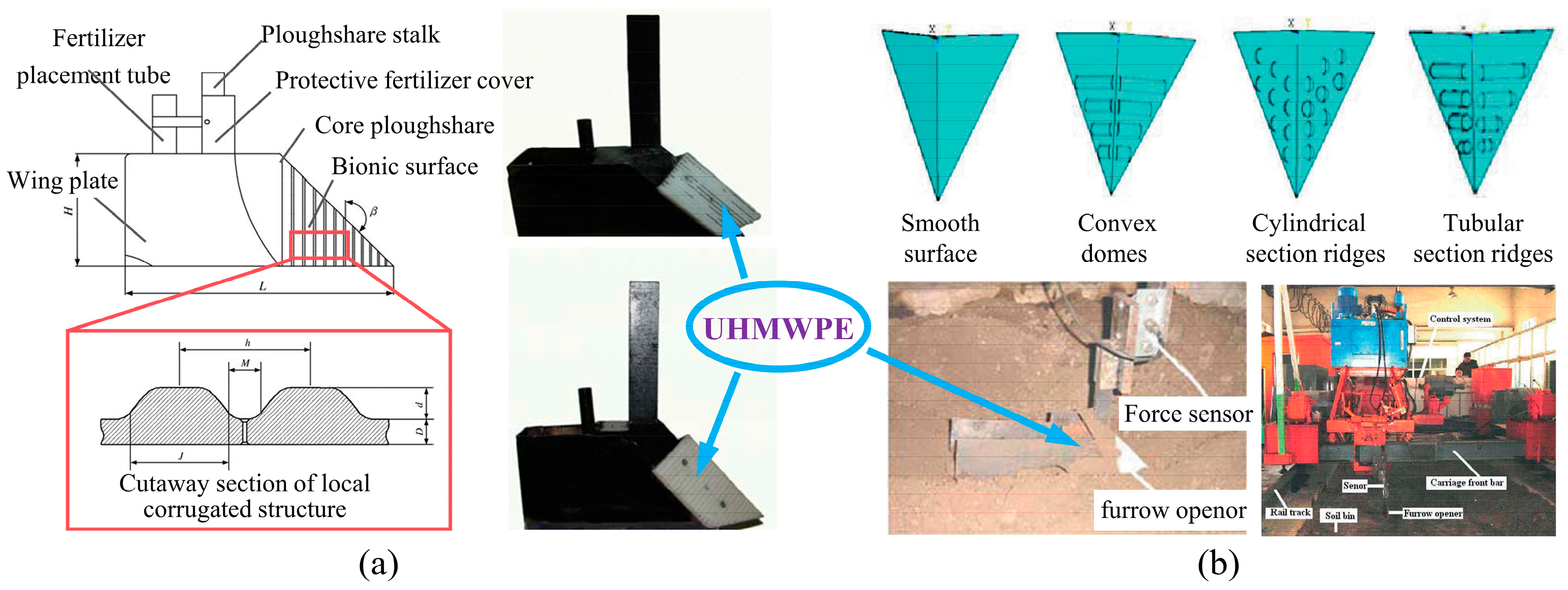
| Mouldboard plough | Flat surface and UHMWPE | Plough resistance 14–22%↓ | [124] | |
| Protuberant structure and UHMWPE | Plough resistance 17–33%↓ | |||
| Furrow opener | Steel ridge structure | Equivalent pressure 13.97%↓ | [127] | |
| Ridge structure and UHMWPE | Equivalent pressure 28.82%↓ | |||
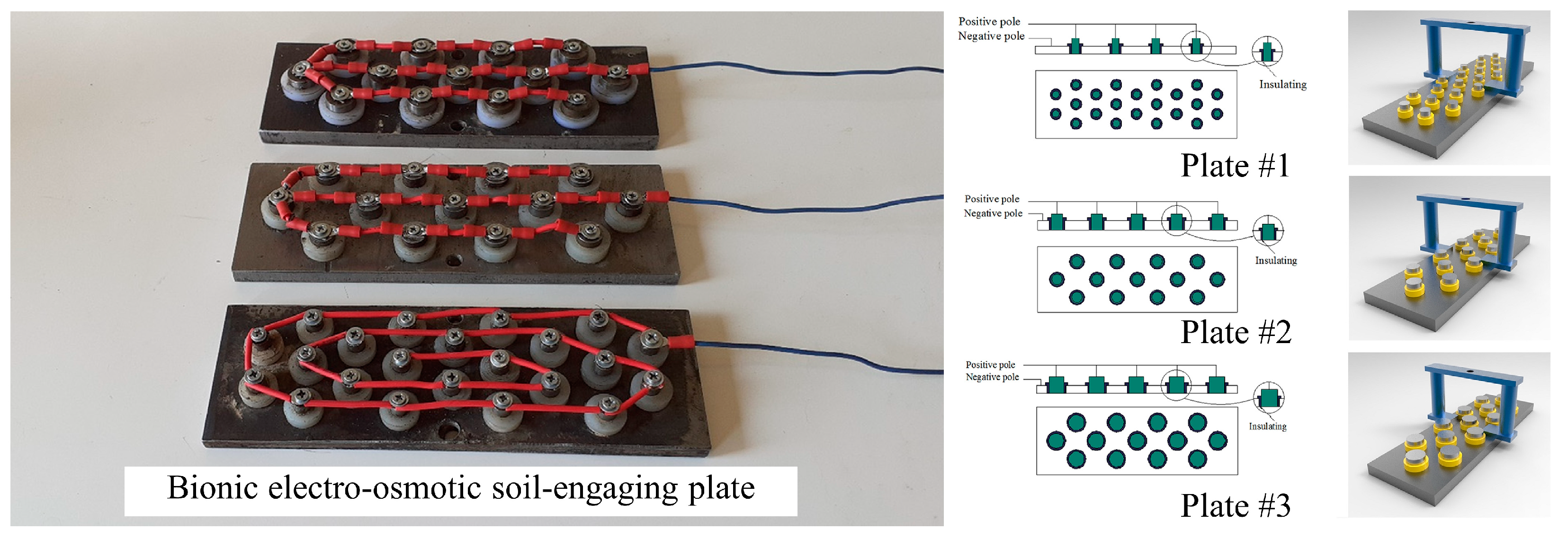
| Drill bucket | Convex structure | Adhesion force 20.18%↓ Adhesion weight 24.04%↓ | [134] | |
| Convex structure and Electro-osmosis | Adhesion force 64.39%↓ Adhesion weight 83.27%↓ | |||
| Pangolin scale | Press roller | Polyhedral structure and Enamel coating | Adhesion mass 25.07%↓ | [136] |
| Polyhedral structure and UHMWPE | Adhesion mass 33.22%↓ | |||
| Earthworm | Digging shovel | Ripple structure | Soil adhesion↓ Digging resistance 12.69%↓ | [114] |
| Ripple structure and Coating | Digging resistance 18.27%↓ Fuel consumption 17.15%↓ | |||
| Rhizoma mperatae | Plate | Chemical modification | Adhesion mass 20.02%↓ | [130] |
| Chemical modification and Bionic texture | Adhesion mass 84.13%↓ |
2.3. Wear-Resistant Biomimetic Components
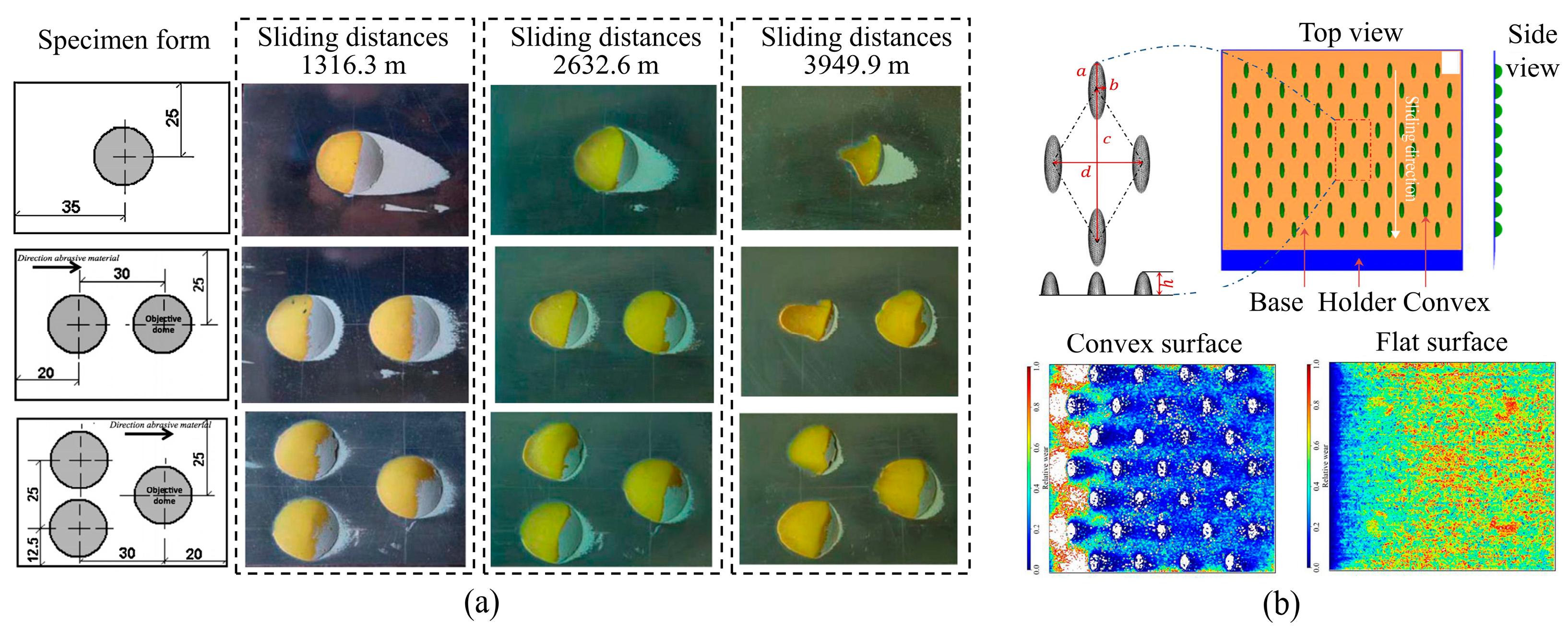
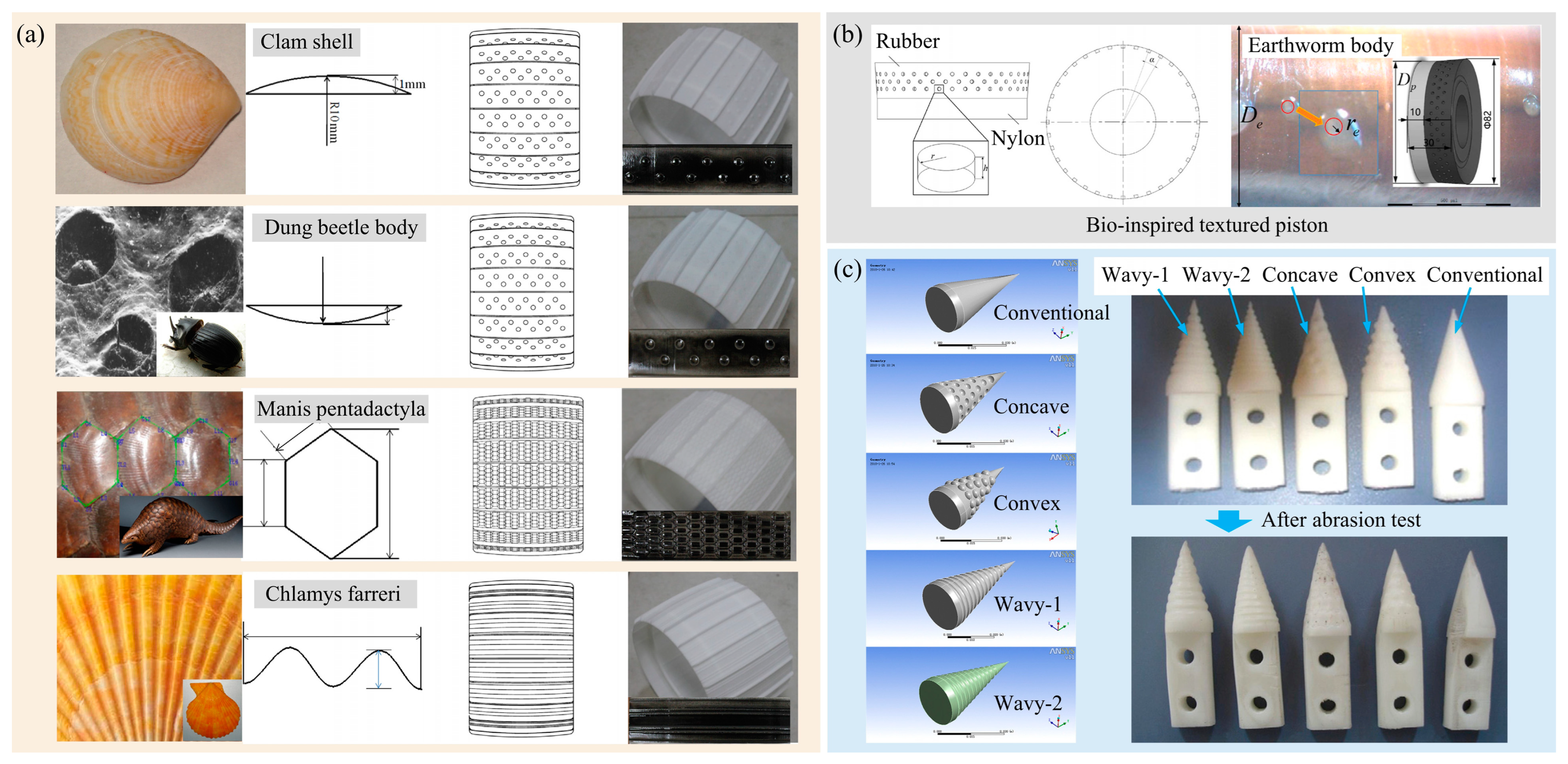
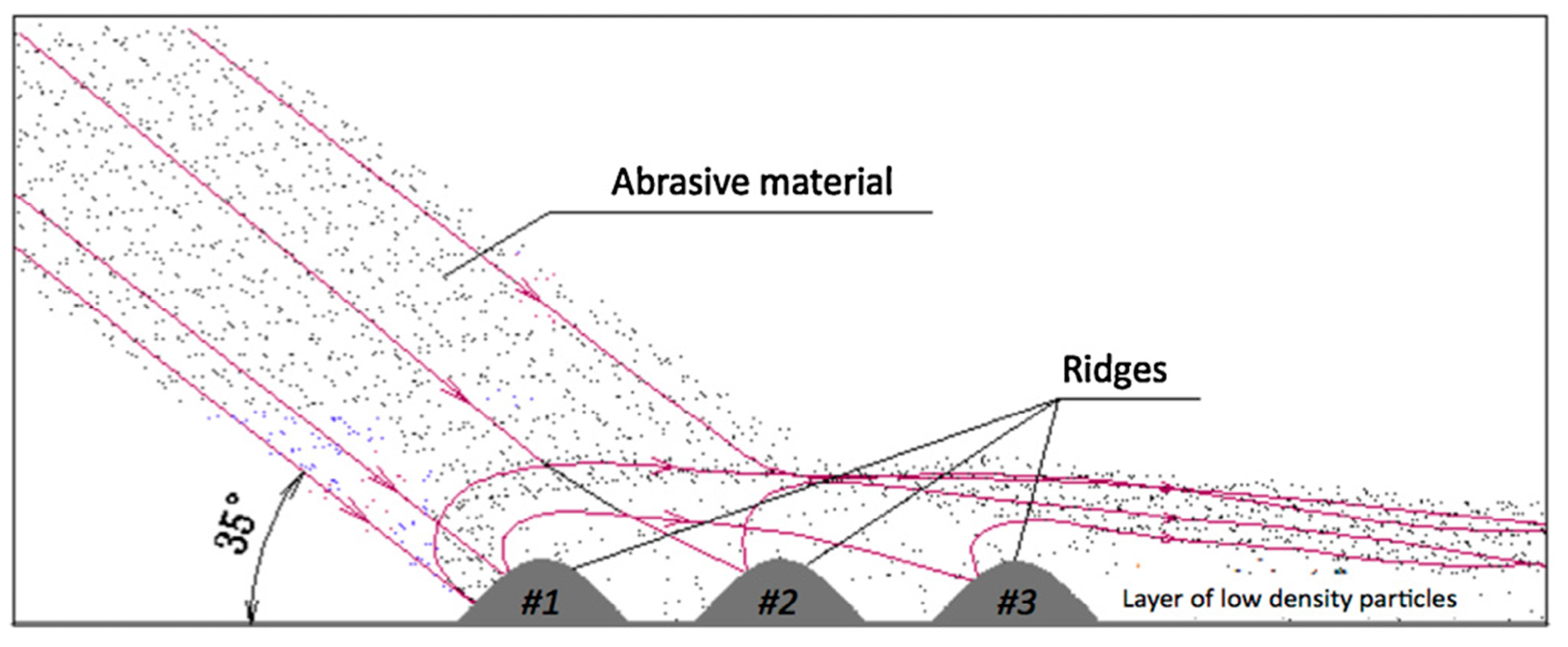
- The macroscopic or microscopic structures of organisms have been imitated and applied to the surfaces of soil-engaging components, which has significantly improved their wear resistance. These structures reduce the wear of soil-engaging components by reducing the contact area with abrasives and changing the movement speed and trajectory of abrasives, thereby significantly enhancing durability;
- Wear test is the main method in the current research process of bionic wear-resistant soil-engaging components. However, there is a big gap between the sample materials, abrasives, and wear conditions used in tests and actual working conditions. More comprehensive test methods, together with numerical simulations and field tests, are required to further analyze the performance and mechanism of bionic wear-resistant soil-engaging components;
- When studying bionic wear-resistant soil-engaging components, the impact on other performance aspects requires consideration. The application of bionic structures such as ribs, convex hulls, and pits to soil-engaging components enhances wear resistance but also alters the contact state between the components and the soil. The influence of bionic structures on the structural strength of the components, the resistance and adhesion encountered during operation, and the overall operational effectiveness need further investigation.
3. Analysis of Optimizing Performance Mechanisms of Biomimetic Components
3.1. Biological Curves and Surfaces
3.2. Non-Smooth Surface Structures
3.2.1. Contact Condition between Biomimetic Component and Soil
3.2.2. Soil Particle Movement on Biomimetic Component Surface
4. Conclusions and Outlook
- (1)
- The biomimetic design of soil-engaging components is effective, and a large number of organisms provide inspiration for the bionics. However, current research on bionic principle is still insufficient, with most designs relying on methods such as the similarity principle, rule of thumb, and experiments. For instance, the scale of bionic design presents a challenge, as biological surface structures span from nanometers to millimeters, posing a significant gap compared to conventional soil-engaging components in engineering. Reasonable methodologies are needed to support these studies. In future research, the functional mechanisms of bionic prototypes can be studied through more advanced testing techniques and professional characterizations. By investigating the key mechanisms underlying draught reduction, anti-adhesion, and wear resistance, a more solid theoretical foundation can be established for the design of biomimetic soil-engaging components.
- (2)
- Bionic coupling design is a future development trend. It is a method that is more comprehensive and closer to the function of biological prototypes and can further improve the performance of soil-engaging components. Existing bionic designs tend to imitate a single feature. However, there is a huge gap between single research and biological entities, and bionics in a single dimension alone cannot lead to perfect results. The requirements for soil-engaging components have become more complex and stringent with human exploration and economic development. Coupling bionics leads to a shift in the design of soil-engaging components from simply imitating biological structures to a deeper level of understanding, realizing a higher level of performance improvement and engineering applications. Through coupling bionics, more effective solutions can be achieved for intricate engineering challenges.
- (3)
- Computer simulations are essential for selecting, designing, and optimizing biomimetic soil-engaging components. Traditional testing is often constrained by factors like equipment availability, soil conditions, and climate. Simulation offers flexibility to overcome these limitations, providing significant convenience for optimizing biomimetic soil-engaging components. In subsequent research, efforts can be directed towards establishing more accurate simulation models. Examples include improving the accuracy of component models and using soil models that better match actual conditions. Additionally, various calculation methods, including the discrete element method (DEM), finite element method (FEM), multibody dynamics (MBD), and computational fluid dynamics (CFD), offer unique advantages. Combining these methods enables more accurate simulation of realistic scenarios for analyzing biomimetic soil-engaging components. For example, combining DEM and MBD allows for the study of the operating effects of complex moving components [71], while combining CFD and DEM allows for the exploration of soil−tool interaction mechanisms in high-moisture-content soils [174]. These methods help to observe more details of soil movements and interactions, enhancing the reference value of simulation results.
- (4)
- Biomimetic soil-engaging components have been proven to have excellent performance, but their widespread adoption in engineering remains limited. The intricate contours and structures of these components often require precise machining methods and additional processing steps, leading to increased production and maintenance costs. In addition, biomimetic soil-engaging components may improve performance in one aspect but have a negative impact on another. For example, adding groove structures may weaken the component’s strength. Therefore, it is necessary to use advanced manufacturing technologies and materials to find a balance between the component design, durability, and manufacturing costs, facilitating broader adoption of biomimetic soil-engaging components in practical operations.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- McBratney, A.; Field, D.J.; Koch, A. The dimensions of soil security. Geoderma 2014, 213, 203–213. [Google Scholar] [CrossRef]
- Ren, L.; Tong, J.; Li, J.; Chen, B. Soil adhesion and biomimetics of soil-engaging components: A review. J. Agric. Eng. Res. 2001, 79, 239–263. [Google Scholar] [CrossRef]
- Ren, L.; Wang, Y.; Li, J.; Tong, J. Flexible unsmoothed cuticles of soil animals and their characteristics of reducing adhesion and resistance. Chin. Sci. Bull. 1998, 43, 166–169. [Google Scholar] [CrossRef]
- Aramide, B.; Pityana, S.; Sadiku, R.; Jamiru, T.; Popoola, P. Improving the durability of tillage tools through surface modification-a review. Int. J. Adv. Manuf. Technol. 2021, 116, 83–98. [Google Scholar] [CrossRef]
- Wegst, U.G.K.; Bai, H.; Saiz, E.; Tomsia, A.P.; Ritchie, R.O. Bioinspired structural materials. Nat. Mater. 2015, 14, 23–36. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Han, Z.; Zhang, J.; Zhang, S. Bionic design of tools in cutting: Reducing adhesion, abrasion or friction. Wear 2021, 482, 203955. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, H.; Sun, J. Review of application of biomimetics for designing soil-engaging tillage implements in Northeast China. Int. J. Agric. Biol. Eng. 2016, 9, 12–21. [Google Scholar]
- Zhang, L.; Zhai, Y.B.; Chen, J.N.; Zhang, Z.E.; Huang, S.Z. Optimization design and performance study of a subsoiler underlying the tea garden subsoiling mechanism based on bionics and EDEM. Soil Tillage Res. 2022, 220, 15. [Google Scholar] [CrossRef]
- Ji, W.; Chen, D.; Jia, H.; Tong, J. Experimental Investigation into Soil-Cutting Performance of the Claws of Mole Rat (Scaptochirus moschatus). J. Bionic Eng. 2010, 7, S166–S171. [Google Scholar] [CrossRef]
- Guan, C.; Fu, J.; Xu, L.; Jiang, X.; Wang, S.; Cui, Z. Study on the reduction of soil adhesion and tillage force of bionic cutter teeth in secondary soil crushing. Biosyst. Eng. 2022, 213, 133–147. [Google Scholar] [CrossRef]
- Wang, S.; Liu, X.; Tong, T.; Xu, Z.; Ma, Y. Parameter Optimization and DEM Simulation of Bionic Sweep with Lower Abrasive Wear Characteristics. Biomimetics 2023, 8, 201. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jiang, X.; Ma, Y.; Tong, J.; Hu, B. Bionic Design of a Potato Digging Shovel with Drag Reduction Based on the Discrete Element Method (DEM) in Clay Soil. Appl. Sci. 2020, 10, 7096. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.Z.; Guo, L.; Chang, Y.A.; Guo, Y.J.; Zhu, F.W.; Chen, D.H.; Liu, X. Compaction Performance of Biomimetic Press Roller to Soil. J. Bionic Eng. 2015, 12, 152–159. [Google Scholar] [CrossRef]
- Jia, H.; Wang, W.; Chen, Z.; Zheng, T.; Zhang, P.; Zhuang, J. Research Status and Prospect of Soil-engaging Components Optimization for Agricultural Machinery. Trans. CSAM 2017, 48, 1–13. [Google Scholar]
- Ani, O.A.; Uzoejinwa, B.B.; Ezeama, A.O.; Onwualu, A.P.; Ugwu, S.N.; Ohagwu, C.J. Overview of soil-machine interaction studies in soil bins. Soil Tillage Res. 2018, 175, 13–27. [Google Scholar] [CrossRef]
- Martinez, A.; Dejong, J.; Akin, I.; Aleali, A.; Arson, C.; Atkinson, J.; Bandini, P.; Baser, T.; Borela, R.; Boulanger, R.; et al. Bio-inspired geotechnical engineering: Principles, current work, opportunities and challenges. Geotechnique 2022, 72, 687–705. [Google Scholar] [CrossRef]
- Dadhich, S.; Bodin, U.; Andersson, U. Key challenges in automation of earth-moving machines. Autom. Constr. 2016, 68, 212–222. [Google Scholar] [CrossRef]
- Li, J.; Huang, H.; Wang, Y.; Tian, L.; Ren, L. Development on research of soft-terrain machine systems. Trans. CSAM 2015, 46, 306–320. [Google Scholar]
- Kushwaha, R.L.; Zhang, Z.X. Evaluation of factors and current approaches related to computerized design of tillage tools: A review. J. Terramech. 1998, 35, 69–86. [Google Scholar] [CrossRef]
- Wang, L.; Xing, J.; He, X.; Li, X.; Guo, W.; Wang, X.; Hou, S. Study on the Mechanism of Motion Interaction between Soil and a Bionic Hole-Forming Device. Agriculture 2023, 13, 1421. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, H.; Ren, L. Experiment and drag reduction mechanism of bionic excavator tooth during soil cutting. Trans. CSAM 2013, 44, 258–261+229. [Google Scholar]
- Zhang, Z.; Zhang, J.; Zhang, Y. Optimization design of furrow opener based on bionics design. Jisuanji Jicheng Zhizao Xitong/Comput. Integr. Manuf. Syst. CIMS 2022, 28, 1143–1149. [Google Scholar] [CrossRef]
- Xiao, M.; Wang, K.; Yang, W.; Wang, W.; Jiang, F. Design and Experiment of Bionic Rotary Blade Based on Claw Toe of Gryllotalpa orientalis Burmeister. Trans. CSAM 2021, 52, 55–63. [Google Scholar]
- Zhu, H.; Wang, D.; He, X.; Shang, S.; Zhao, Z.; Wang, H.; Tan, Y.; Shi, Y. Study on Plant Crushing and Soil Throwing Performance of Bionic Rotary Blades in Cyperus esculentus Harvesting. Machines 2022, 10, 562. [Google Scholar] [CrossRef]
- Yang, Y.; Li, M.; Tong, J.; Ma, Y. Study on the Interaction between Soil and the Five-Claw Combination of a Mole Using the Discrete Element Method. Appl. Bionics Biomech. 2018, 2018, 11. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Chen, D.; Zhang, S.; Tong, J. Biomimeitc Design of a Stubble-Cutting Disc Using Finite Element Analysis. J. Bionic Eng. 2013, 10, 118–127. [Google Scholar] [CrossRef]
- Ji, W.F.; Tong, J.; Chen, D.H. Reconstruction of geometrical structure of claw of mole rat (scaptochirus moschatus) and finite element analysis of claw against soil. Appl. Mech. Mater. 2014, 461, 108–113. [Google Scholar] [CrossRef]
- Tong, J.; Ji, W.; Jia, H.; Chen, D.; Yang, X. Design and Tests of Biomimetic Blades for Soil-rototilling and Stubble-breaking. J. Bionic Eng. 2015, 12, 495–503. [Google Scholar] [CrossRef]
- Torotwa, I.; Ding, Q.; Awuah, E.; He, R. Biomimetic tool design improves tillage efficiency, seedbed quality, and straw incorporation during rototilling in conservation farming. J. Agric. Eng. 2023, 54, 9. [Google Scholar] [CrossRef]
- Torotwa, I.; Ding, Q.; Makange, N.M.; Liang, L.e.; He, R. Performance evaluation of a biomimetically designed disc for dense-straw mulched conservation tillage. Soil Tillage Res. 2021, 212, 10. [Google Scholar] [CrossRef]
- Torotwa, I.; Ding, Q.; Alele, J.O.; He, R. 3D finite element analysis of the tillage and straw cutting performance of a curved-edged toothed disc. Eng. Agric. 2022, 42, e20210190. [Google Scholar] [CrossRef]
- Yu, J.; Ma, Y.; Wang, S.; Xu, Z.; Liu, X.; Wang, H.; Qi, H.; Han, L.; Zhuang, J. 3D Finite Element Simulation and Experimental Validation of a Mole Rat’s Digit Inspired Biomimetic Potato Digging Shovel. Appl. Sci. 2022, 12, 1761. [Google Scholar] [CrossRef]
- Yang, Y.; Tong, J.; Ma, Y.; Li, M.; Jiang, X.; Li, J. Design and Experiment of Bionic Soil-cutting Blade Based on Multi-claw Combination of Mole Rat. Trans. CSAM 2018, 49, 122–128. [Google Scholar]
- Yang, Y.; Tong, J.; Huang, Y.; Li, J.; Jiang, X. Biomimetic Rotary Tillage Blade Design for Reduced Torque and Energy Requirement. Appl. Bionics Biomech. 2021, 2021, 16. [Google Scholar] [CrossRef] [PubMed]
- Song, W.; Jiang, X.; Li, L.e.; Ren, L.; Tong, J. Increasing the width of disturbance of plough pan with bionic inspired subsoilers. Soil Tillage Res. 2022, 220, 14. [Google Scholar] [CrossRef]
- Guo, Z.; Zhou, Z.; Zhang, Y.; Li, Z. Bionic optimization research of soil cultivating component design. Sci. China Ser. E-Technol. Sci. 2009, 52, 955–965. [Google Scholar] [CrossRef]
- Zhang, P.; Guo, Z.-J.; Jin, X.; Guo, Z.-Z.; Zhang, S. Design and experiment of bionic subsoiler with variable variable curvature share shaft drag reduction. J. Jilin Univ. (Eng. Technol. Ed.) 2022, 52, 1174–1183. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, J.; Ma, Y. Design and experiment of bionic anti-drag subsoiler. Trans. CSAM 2014, 45, 141–145. [Google Scholar]
- Zhou, W.; Ni, X.; Song, K.; Wen, N.; Song, C.; Sun, X.; Wang, Y.; Wang, J.; Wang, Q.; Tang, H. Bionic Design of Furrow Opener Based on Muskrat Claw-Toe Structure to Improve the Operating Performance of Deep Application of Liquid Fertilizer in Paddy Fields in Cold Region of China. Agriculture 2023, 13, 254. [Google Scholar] [CrossRef]
- Moore, A.L.; Budny, J.E.; Russell, A.P.; Butcher, M.T. Architectural specialization of the intrinsic thoracic limb musculature of the American badger (Taxidea taxus). J. Morphol. 2013, 274, 35–48. [Google Scholar] [CrossRef]
- Ma, Y.; Pei, G.; Wang, H.; Lu, X.; Song, G.; Tong, J. Simulation and experiment of badger claw toe bionic excavator bucket tooth for improving performance of digging and cutting. Trans. CSAE 2016, 32, 67–72. [Google Scholar]
- Akter, A.Y.; Basak, H. Design and analysis of biomimetics based excavator bucket and tooth. Proc. Inst. Mech. Eng. Part E-J. Process Mech. Eng. 2022, 236, 1167–1175. [Google Scholar] [CrossRef]
- Zhou, W.; Ni, X.; Wen, N.; An, T.; Wang, Y. Bionic Design of Liquid Fertilizer Deep Application Spray Needle, Based on Badger Claw-Toe, for Improving the Operating Performance of Liquid Fertilizer Deep Application in Northeast China. Processes 2023, 11, 756. [Google Scholar] [CrossRef]
- Zhou, W.; Ni, X.; Song, K.; Wen, N.; Wang, J.; Fu, Q.; Na, M.; Tang, H.; Wang, Q. Bionic Optimization Design and Discrete Element Experimental Design of Carrot Combine Harvester Ripping Shovel. Processes 2023, 11, 1526. [Google Scholar] [CrossRef]
- Zhao, H.; Huang, Y.; Liu, Z.; Liu, W.; Zheng, Z. Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture 2021, 11, 425. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, H.; Jia, H.; Wang, H.; Xiao, Y.; Yu, J.; Qi, H.; Chen, C. Mechanical properties, microstructure and morphological properties of badger teeth. Bioinspired Biomim. Nanobiomat. 2018, 7, 131–140. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, H.; Zhuang, J.; Qi, H.; Yu, J. Effects of Bionic Curves on Penetration Force under Difference Soils. Appl. Sci. 2020, 10, 529. [Google Scholar] [CrossRef]
- Jia, H.; Meng, F.; Liu, L.; Shi, S.; Zhao, J.; Zhuang, J. Biomimetic Design and Experiment of Core-share Furrow Opener. Trans. CSAM 2020, 51, 44–49, 77. [Google Scholar]
- Sun, J.; Chen, H.; Wang, Z.; Ou, Z.; Yang, Z.; Liu, Z.; Duan, J. Study on plowing performance of EDEM low-resistance animal bionic device based on red soil. Soil Tillage Res. 2020, 196, 15. [Google Scholar] [CrossRef]
- Li, J.; Yan, Y.; Chirende, B.; Wu, X.; Wang, Z.; Zou, M. Bionic Design for Reducing Adhesive Resistance of the Ridger Inspired by a Boar’s Head. Appl. Bionics Biomech. 2017, 2017, 10. [Google Scholar] [CrossRef]
- Chang, Z.; Liu, W.; Tong, J.; Guo, L.; Xie, H.; Yang, X.; Mu, H.; Chen, D. Design and Experiments of Biomimetic Stubble Cutter. J. Bionic Eng. 2016, 13, 335–343. [Google Scholar] [CrossRef]
- Ma, W.; You, Y.; Wang, D.; Hu, J.; Huan, X.; Zhu, L. Design and Experiment of Low-resistance Soil Loosening Shovel for Cutting Roots and Reseeding in Perennial Alfalfa Field. Trans. CSAM 2021, 52, 86–95, 144. [Google Scholar]
- Chen, D.; Liu, X.i.; Cui, X.; Zhang, L.; Chen, H. Research progress and development trend of the drag reduction inspired by fish skin. Prog. Org. Coat. 2023, 182, 18. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, H.; Sun, J. Bioinspired design of a ridging shovel with anti-adhesive and drag reducing. Adv. Mech. Eng. 2015, 7, 11. [Google Scholar] [CrossRef]
- Niu, J.; Luo, T.; Xie, J.; Cai, H.; Zhou, Z.; Chen, J.; Zhang, S. Simulation and experimental study on drag reduction and anti-adhesion of subsoiler with bionic surface. Int. J. Agric. Biol. Eng. 2022, 15, 57–64. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.; Ma, Y.; Tong, J.; Zhang, Z. DEM simulation of bionic subsoilers (tillage depth > 40 cm) with drag reduction and lower soil disturbance characteristics. Adv. Eng. Softw. 2018, 119, 30–37. [Google Scholar] [CrossRef]
- Wang, Y.; Li, N.; Ma, Y.; Tong, J.; Pfleging, W.; Sun, J. Field experiments evaluating a biomimetic shark-inspired (BioS) subsoiler for tillage resistance reduction. Soil Tillage Res. 2020, 196, 13. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, H.; Tan, H.; Cao, X.; Zhang, X.; Yang, Y. Design and performance experiment of opener based on bionic sailfish head curve. Trans. CSAE 2017, 33, 32–39. [Google Scholar]
- Zhao, S.; Gu, Z.; Yuan, Y.; Lu, J. Bionic Design and Experiment of Potato Curved Surface Sowing Furrow Opener. Trans. CSAM 2021, 52, 32–42, 64. [Google Scholar]
- Wang, J.; Wen, N.; Liu, Z.; Zhou, W.; Tang, H.; Wang, Q.; Wang, J. Coupled Bionic Design of Liquid Fertilizer Deep Application Type Opener Based on Sturgeon Streamline to Enhance Opening Performance in Cold Soils of Northeast China. Agriculture 2022, 12, 615. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, Z.; Lai, Q.; Guler, H.; Zhao, L.; Yang, L. Preliminary investigation of convergent evolution-inspired serrated structure for optimization of mini rotavator blade’s cutting-edge. Appl. Eng. Agric. 2023, 39, 95–108. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; Tong, J.; Carr, S. Convergent evolution inspired serrated structure for improving efficiency of soil imprinting and its mechanism investigation. Int. J. Agric. Biol. Eng. 2019, 12, 16–26. [Google Scholar] [CrossRef]
- Scott, R.G.; Richardson, R.C. Realities of biologically inspired design with a subterranean digging robot example. In Proceedings of the 6th IASTED International Conference on Robotics and Applications, Cambridge, MA, USA, 31 October–2 November 2005; pp. 226–231. [Google Scholar]
- Van Wassenbergh, S.; Heindryckx, S.; Adriaens, D. Kinematics of chisel-tooth digging by African mole-rats. J. Exp. Biol. 2017, 220, 4479–4485. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhai, Y.; Wu, C.; Huang, S.; Zhang, Z. Modeling the interaction between a new four-bar subsoiling mechanism and red soil using the improved differential evolution algorithm and DEM. Comput. Electron. Agric. 2023, 208, 15. [Google Scholar] [CrossRef]
- Jia, H.; Wang, Q.; Huang, D.; Zhu, L.; Li, M.; Zhao, J. Design of bionic mole forelimb intelligent row cleaners. Int. J. Agric. Biol. Eng. 2019, 12, 27–35. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, J.; Wang, Q.; Wang, P.; Zhu, Y.; Zhang, J. Motion Characteristics of the Appendages of Mole Crickets during Burrowing. J. Bionic Eng. 2019, 16, 319–327. [Google Scholar] [CrossRef]
- Li, X. Research on Potato Coupled-Bionic Digging and its Drag Reduction. Master’s Thesis, Xihua University, Chengdu, China, 2018. [Google Scholar]
- Lu, Y. Design and Experimental Study of Bionic Energy Storage-Profiling Deep Loosening Device. Ph.D. Thesis, Jilin University, Changchun, China, 2023. [Google Scholar]
- Lu, Y. Design and Experimental Study of High Speed Bionic Trench Opener. Master’s Thesis, Jilin University, Changchun, China, 2020. [Google Scholar]
- Zhao, J.; Lu, Y.; Wang, X.; Zhuang, J.; Han, Z. A bionic profiling-energy storage device based on MBD-DEM coupled simulation optimization reducing the energy consumption of deep loosening. Soil Tillage Res. 2023, 234, 20. [Google Scholar] [CrossRef]
- Wei, H.; Zhang, Y.; Zhang, T.; Guan, Y.; Xu, K.; Ding, X.; Pang, Y. Review on Bioinspired Planetary Regolith-Burrowing Robots. Space Sci. Rev. 2021, 217, 39. [Google Scholar] [CrossRef]
- Zhang, D. Drag-Reducing Mechanisms of Erathworm Mucus and Bionic Applications on Sub-Soil Liquid Fertilizer. Ph.D. Thesis, Jilin University, Changchun, China, 2016. [Google Scholar]
- Jia, H.; Zheng, J.; Zhao, J.; Guo, M.; Zhuang, J.; Wang, Z. Design and parameter optimization of earthworm-like multi-function opener. Trans. CSAE 2018, 34, 62–71. [Google Scholar]
- Zhao, J.; Wang, X.; Lu, Y.; Wei, Y.; Guo, M.; Fu, J. Biomimetic earthworm dynamic soil looser for improving soybean emergence rate in cold and arid regions. Int. J. Agric. Biol. Eng. 2021, 14, 22–31. [Google Scholar] [CrossRef]
- Naziri, S.; Ridgeway, C.; Castelo, J.A.; Ibarra, S.; Provenghi, K.; Cortes, D.D. Earthworm-inspired subsurface penetration probe for landed planetary exploration. Acta Geotech. 2024, 19, 1267–1274. [Google Scholar] [CrossRef]
- Isaka, K.; Tsumura, K.; Watanabe, T.; Toyama, W.; Sugesawa, M.; Yamada, Y.; Yoshida, H.; Nakamura, T. Development of Underwater Drilling Robot Based on Earthworm Locomotion. IEEE Access 2019, 7, 103127–103141. [Google Scholar] [CrossRef]
- Jung, S.; Winter, A.G.; Hosoi, A.E. Dynamics of digging in wet soil. Int. J. Non-Linear Mech. 2011, 46, 602–606. [Google Scholar] [CrossRef]
- Winter, A.G.G.; Deits, R.L.H.; Dorsch, D.S.; Slocum, A.H.; Hosoi, A.E. Razor clam to RoboClam: Burrowing drag reduction mechanisms and their robotic adaptation. Bioinspir. Biomim. 2014, 9, 11. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Chen, Y.; Martinez, A.; Fuentes, R. A Bioinspired Self-Burrowing Probe in Shallow Granular Materials. J. Geotech. Geoenviron. Eng. 2023, 149, 15. [Google Scholar] [CrossRef]
- Tong, J.; Wu, B.; Song, Z.; Gao, Z.; Sun, J.; Ma, Y.; Zhuang, J. Research on the drag reduction mechanism of antlion (Myrmeleon sagax) larvae nonsmooth structural surface. Microsc. Res. Tech. 2020, 83, 338–344. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, R.; Hou, P.; Tong, J.; Zhou, D.; Yu, H.; Zhang, Q.; Zhang, J.; Xin, Y. Bionic Nonsmooth Drag Reduction Mathematical Model Construction and Subsoiling Verification. Appl. Bionics Biomech. 2021, 2021, 13. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Hou, P.; Xin, Y.; Wu, B.; Tong, J.; Yu, H.; Qi, J.; Zhang, J.; Zhang, Q. Resistance and Consumption Reduction Mechanism of Bionic Vibration and Verification of Field Subsoiling Experiment. Appl. Sci. 2021, 11, 480. [Google Scholar] [CrossRef]
- Gundiah, N.; Jaddivada, S. Making the cut: Mechanics of cutting and steering of insect probes. Curr. Opin. Insect Sci. 2020, 42, 84–89. [Google Scholar] [CrossRef]
- Zhao, J.; Lu, Y.; Guo, M.; Fu, J.; Wang, Y. Design and experiment of bionic stubble breaking-deep loosening combined tillage machine. Int. J. Agric. Biol. Eng. 2021, 14, 123–134. [Google Scholar] [CrossRef]
- Zhao, J.; Guo, M.; Lu, Y.; Huang, D.; Zhuang, J. Design of bionic locust mouthparts stubble cutting device. Int. J. Agric. Biol. Eng. 2020, 13, 20–28. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X.; Zhuang, J.; Liu, H.; Wang, Y.; Yu, Y. Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine. Agriculture 2021, 11, 775. [Google Scholar] [CrossRef]
- Zhu, H.; Qian, C.; Bai, L.; Zhao, H.; Ma, S.; Zhang, X.; Li, H. Design and experiments of active anti-blocking device with forward-reverse rotation. Trans. CSAE 2022, 38, 1–11. [Google Scholar]
- Qi, H.; Ma, Z.; Xu, Z.; Wang, S.; Ma, Y.; Wu, S.; Guo, M.; Maranzana, N. The Design and Experimental Validation of a Biomimetic Stubble-Cutting Device Inspired by a Leaf-Cutting Ant’s Mandibles. Biomimetics 2023, 8, 555. [Google Scholar] [CrossRef] [PubMed]
- Bianchi, G.; Agoni, A.; Cinquemani, S. A Bioinspired Robot Growing like Plant Roots. J. Bionic Eng. 2023, 20, 2044–2058. [Google Scholar] [CrossRef]
- Mishra, A.K.; Tramacere, F.; Mazzolai, B. From plant root’s sloughing and radial expansion mechanisms to a soft probe for soil exploration. In Proceedings of the 1st IEEE-RAS International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 71–76. [Google Scholar]
- Chen, Y.Y.; Martinez, A. DEM modelling of root circumnutation-inspired penetration in shallow granular materials. Geotechnique 2023, 18. [Google Scholar] [CrossRef]
- Jung, W.; Choi, S.M.; Kim, W.; Kim, H.-Y. Reduction of granular drag inspired by self-burrowing rotary seeds. Phys. Fluids 2017, 29. [Google Scholar] [CrossRef]
- Tang, Y.; Tao, J. Multiscale analysis of rotational penetration in shallow dry sand and implications for self-burrowing robot design. Acta Geotech. 2022, 17, 4233–4252. [Google Scholar] [CrossRef]
- Zhang, X.R.; Wang, C.; Chen, Z.S.; Zeng, Z.W. Design and experiment of a bionic vibratory subsoiler for banana fields in southern China. Int. J. Agric. Biol. Eng. 2016, 9, 75–83. [Google Scholar]
- Tong, J.; Sun, J.; Chen, D.; Zhang, S. Geometrical features and wettability of dung beetles and potential biomimetic engineering applications in tillage implements. Soil Tillage Res. 2005, 80, 1–12. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, Y.; Ma, Y.; Guo, L.; Sun, J.; Tong, J. Earthworm epidermal mucus: Rheological behavior reveals drag-reducing characteristics in soil. Soil Tillage Res. 2016, 158, 57–66. [Google Scholar] [CrossRef]
- Dai, Q.; Qiu, S.; Huang, W.; Wang, X. Non-sticky and Free-forward Performances of Grubs against Soil. Colloids Surf. B-Biointerfaces 2020, 191, 111006. [Google Scholar] [CrossRef]
- Jia, X. Unsmooth cuticles of soil animals and theoretical analysis of their hydrophobicity and anti-soil-adhesion mechanism. J. Colloid Interface Sci. 2006, 295, 490–494. [Google Scholar] [CrossRef] [PubMed]
- Ren, L. Progress in the bionic study on anti-adhesion and resistance reduction of terrain machines. Sci. China Ser. E-Technol. Sci. 2009, 52, 273–284. [Google Scholar] [CrossRef]
- Ren, L.; Deng, S.; Wang, J.; Han, Z. Design Principles of the Non-smooth Surface of Bionic Plow Moldboard. J. Bionic Eng. 2004, 1, 9–19. [Google Scholar] [CrossRef]
- Deng, S. The Mechanism of Reducing Soil Adhesion and the Design of Bionic Plow. Ph.D. Thesis, Jilin University, Changchun, China, 2004. [Google Scholar]
- Ren, L.; Han, Z.; Li, J.; Tong, J. Effects of non-smooth characteristics on bionic bulldozer blades in resistance reduction against soil. J. Terramech. 2002, 39, 221–230. [Google Scholar] [CrossRef]
- Ren, L.; Han, Z.; Li, J.; Tong, J. Experimental investigation of bionic rough curved soil cutting blade surface to reduce soil adhesion and friction. Soil Tillage Res. 2006, 85, 1–12. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.; Chang, Y.; Li, M.; Zhang, L.; Liu, X. Finite element analysis and experimental verification of bionic press roller in reducing adhesion and resistance. Trans. CSAM 2014, 45, 85–92. [Google Scholar]
- Gao, W.; Lin, J.; Li, B.; Ma, T. Parameter Optimization and Experiment for Spiral Type Opener Device of Maize Straw Deep Bury and Returning Machine. Trans. CSAM 2018, 49, 45–54. [Google Scholar]
- He, L.; Sun, Y.; Gao, K.; Liu, B.; Xu, L.; Wang, C. Experiments and Design of Bionic Non-smmoth Spiral Bit. J. Jilin Univ. (Earth Sci. Ed.) 2009, 39, 300–304. [Google Scholar] [CrossRef]
- El Salem, A.; Zhang, G.; Abdeen, M.A.M.; Wang, H.; Gao, Y. Optimizing the adhesion of soil-touching parts based on biomimetic concepts using the Taguchi method. Int. J. Agric. Biol. Eng. 2022, 15, 147–154. [Google Scholar] [CrossRef]
- Liu, H.; Yan, W.; Ji, Y.; Zhang, W. Working Performance of the Low-Adhesion and Anti-Slip Bionic Press Roller in the Rice-Wheat Rotation Area. Agriculture 2022, 12, 750. [Google Scholar] [CrossRef]
- Zhao, X.; Ma, X.; Gao, Q.; Chen, C.; Chen, J. Design and experiment of bionic resistance reduction for tree transplanter shovel. Trans. CSAE 2018, 34, 37–42. [Google Scholar]
- Jia, H.; Wang, W.; Wang, W.; Zheng, J.; Wang, Q.; Zhuang, J. Application of anti-adhesion structure based on earthworm motion characteristics. Soil Tillage Res. 2018, 178, 159–166. [Google Scholar] [CrossRef]
- Ma, W.-b.; Liu, J.; Cheng, Y.-r.; Zhu, W. Study on mesoscopic adhesion characteristics of deep-sea sediment for self-cleaning mechanism of bionic grouser. Appl. Ocean Res. 2023, 131, 11. [Google Scholar] [CrossRef]
- Li, J.; Li, X.; Hu, B.; Gu, T.; Wang, Z.; Wang, H. Analysis of the resistance reduction mechanism of potato bionic digging shovels in clay and heavy soil conditions. Comput. Electron. Agric. 2023, 214, 12. [Google Scholar] [CrossRef]
- Li, J.; Gu, T.; Li, X.; Wang, Z.; Hu, B.; Ma, Y. Analysis and experiment of the bionic drag reduction characteristics of potato digging shovels on clayey black soil conditions. Trans. CSAE 2023, 39, 1–9. [Google Scholar]
- Zhao, P.; Yu, T.; Xu, G.; Guo, R.; Li, H.; Xu, H.; Jin, T.; Ji, D. Design and drag reduction performance analysis of a potato harvest shovel based on the surface texture characteristics of pangolin scale. INMATEH-Agric. Eng. 2023, 70, 21–36. [Google Scholar] [CrossRef]
- Fu, M.; Li, R.F.; Hao, Y.L.; Meng, F.H.; Zhou, J.C.; Wang, C.M. Improved design and experiment of anti-clay adhesion for no-tillage maize planter seeding monomer. INMATEH-Agric. Eng. 2023, 70, 337–349. [Google Scholar] [CrossRef]
- Wang, H.; Ding, K.; Zhang, G.; Jiang, Z.; El Salem, A.; Gao, Y. Research on drag reduction performance of sliding plate of rice direct seeding machine based on non-smooth structure of loach surface. J. Terramech. 2023, 110, 79–85. [Google Scholar] [CrossRef]
- Wang, Y.; Xue, W.; Ma, Y.; Tong, J.; Liu, X.; Sun, J. DEM and soil bin study on a biomimetic disc furrow opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Chen, D.; Yang, X.; Dai, T.; Sun, Y.; Chang, Z. Bionic Design to Reduce Jacking Force for Trenchless Installations in Clay Soil. J. Bionic Eng. 2020, 17, 686–694. [Google Scholar] [CrossRef]
- Ren, L.; Liang, Y. Biological couplings: Classification and characteristic rules. Sci. China Ser. E-Technol. Sci. 2009, 52, 2791–2800. [Google Scholar] [CrossRef]
- Xu, X.; Ren, L.; Chen, B.; Cui, X.; Wang, Y.; Zhang, B.; Ge, L.; Jin, G. Preliminary study on the chemical composition of typical soil animal body surfaces. Trans. CSAM 1990, 3, 79–83. [Google Scholar]
- Tong, J.; Ren, L.Q.; Chen, B.C. Chemical constitution and abrasive wear behaviour of pangolin scales. J. Mater. Sci. Lett. 1995, 14, 1468–1470. [Google Scholar] [CrossRef]
- El Salem, A.; Zhang, G.Z.; Wang, H.C.; Salem, H.M.; Abdalla, M.A.I.; Ghazy, A.A. The effect of integrating a bio-inspired convex structure with a low-surface energy polymer on soil adhesion and friction. J. Terramech. 2023, 109, 93–100. [Google Scholar] [CrossRef]
- Soni, P.; Salokhe, V.M.; Nakashima, H. Modification of a mouldboard plough surface using arrays of polyethylene protuberances. J. Terramech. 2007, 44, 411–422. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.; Chang, Y.; Chen, D.; Dong, W.; Zhang, L. Reduction of soil adhesion and traction resistance of ridged bionic press rollers. Trans. CSAM 2014, 45, 135–140. [Google Scholar]
- Ma, Y.; Ma, S.; Jia, H.; Liu, Y.; Peng, J.; Gao, Z. Measurement and analysis on reducing adhesion and resistance of bionic ripple opener. Trans. CSAE 2014, 30, 36–41. [Google Scholar]
- Tong, J.; Moayad, B.Z.; Ma, Y.H.; Sun, J.Y.; Chen, D.H.; Jia, H.L.; Ren, L.Q. Effects of Biomimetic Surface Designs on Furrow Opener Performance. J. Bionic Eng. 2009, 6, 280–289. [Google Scholar] [CrossRef]
- Jia, X.; Ren, L.; Chen, B. Characteristics of reducing adhesion and resistance of bionic coatings prepared for touching-soil components of terrain machinery. Trans. CSAE 1995, 11, 10–13. [Google Scholar]
- Zhang, Q.; Li, B.; Xu, Y.; Zhang, J.; Li, M.; Tong, J. Effects of biomimetic press roller type, material, velocity, and packing force on soil compaction characteristics. Trans. ASABE 2021, 64, 1929–1941. [Google Scholar] [CrossRef]
- Li, J.; Tong, J.; Hu, B.; Ma, Y. Biomimetic functional surface of reducing soil adhesion on 65Mn steel. Adv. Mech. Eng. 2019, 11, 14. [Google Scholar] [CrossRef]
- Zu, Y.Q.; Yan, Y.Y. Numerical Simulation of Electroosmotic Flow near Earthworm Surface. J. Bionic Eng. 2006, 3, 179–186. [Google Scholar] [CrossRef]
- Cong, Q.; Wu, L.; Ren, L.; Chen, B. The Principled Experiment of Reducing Soil Adhesion andScouring Soil by Nonsmooth Surface Electroosmosis. Trans. CSAE 1995, 11, 19–23. [Google Scholar]
- Ren, L.; Cong, Q.; Tong, J.; Chen, B. Reducing adhesion of soil against loading shovel using bionic electro-osmosis method. J. Terramech. 2001, 38, 211–219. [Google Scholar] [CrossRef]
- Du, C. Bionic Research of Soil Anti-Adhesion Rotary Drilling Tools. Master’s Thesis, Jilin University, Chengdu, China, 2023. [Google Scholar]
- Massah, J.; Fard, M.R.; Aghel, H. An optimized bionic electro-osmotic soil-engaging implement for soil adhesion reduction. J. Terramech. 2021, 95, 1–6. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, M.; Zhang, J.B.; Li, B.; Wei, Y.; Xu, Y.; Tong, J.; Zhang, Z. Design and Experiment of Bionically Polyhedral Geometrically Press Rollers. J. Agric. Mech. Res. 2020, 42, 154–159. [Google Scholar] [CrossRef]
- Gharahbagh, E.A.; Qiu, T.; Rostami, J. Evaluation of Granular Soil Abrasivity for Wear on Cutting Tools in Excavation and Tunneling Equipment. J. Geotech. Geoenviron. Eng. 2013, 139, 1718–1726. [Google Scholar] [CrossRef]
- Malvajerdi, A.S. Wear and coating of tillage tools: A review. Heliyon 2023, 9, 9. [Google Scholar] [CrossRef]
- Tong, J.; Rong, B.-J.; Ma, Y.-H.; Zhang, J.-B. Abrasive wear of the biomimetic ridge surfaces against soil. Mocaxue Xuebao/Tribol. 2008, 28, 193–197. [Google Scholar]
- Ma, Y.; Lin, F.; Yan, Z.; Zhuang, J.; Wang, Z.; Deng, Z.; Tong, J. Micro morphology and properties of tribological action for shell in Cyclina sinensis. Trans. CSAE 2013, 29, 298–304. [Google Scholar]
- Tian, L.; Tian, X.; Wang, Y.; Hu, G.; Ren, L. Anti-wear properties of the molluscan shell Scapharca subcrenata: Influence of surface morphology, structure and organic material on the elementary wear process. Mater. Sci. Eng. C 2014, 42, 7–14. [Google Scholar] [CrossRef] [PubMed]
- Tong, J.; Mohammad, M.A.; Zhang, J.B.; Ma, Y.H.; Rong, B.J.; Chen, D.H.; Menon, C. DEM Numerical Simulation of Abrasive Wear Characteristics of a Bioinspired Ridged Surface. J. Bionic Eng. 2010, 7, 175–181. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, J.; Ma, Y. Abrasive wear characteristics of subsoiler tines with bionic rib structure surface. J. Jilin Univ. (Eng. Technol. Ed.) 2015, 45, 174–180. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Q.; Ge, Y.; Jiang, Y. Analysis of the wear-resistance characteristics of bionic ridge structures. Appl. Eng. Agric. 2020, 36, 697–702. [Google Scholar] [CrossRef]
- Liu, J.; Gao, X.; Xu, Y.; Chen, X.; Ling, G. Research on Abrasive Wear Properties of Bionic Non-smooth Coating by Laser Cladding. J. Mater. Eng. 2013, 3, 32–36. [Google Scholar]
- Tong, J.; Zhang, Z.; Ma, Y.; Chen, D.; Jia, B.; Menon, C. Abrasive wear of embossed surfaces with convex domes. Wear 2012, 274, 196–202. [Google Scholar] [CrossRef]
- Yan, Y.; Helmons, R.; Wheeler, C.; Schott, D. Optimization of a convex pattern surface for sliding wear reduction based on a definitive screening design and discrete element method. Powder Technol. 2021, 394, 1094–1110. [Google Scholar] [CrossRef]
- Zhang, Z.; Gan, S.; Zuo, G.; Zhao, L.; Chen, Z.; Carr, S. Bionic Design of Sandfish (Scincus scincus) Head Inspired Subsoiler Tine and Its Performance Evaluation by DEM. In Proceedings of the 2021 American Society of Agricultural and Biological Engineers Annual International Meeting, ASABE 2021, Online, 12–16 July 2021; pp. 670–685. [Google Scholar]
- Staudt, K.; Saxe, F.; Schmied, H.; Bohme, W.; Baumgartner, W. Sandfish inspires engineering. In Bioinspiration, Biomimetics, and Bioreplication; SPIE: Bellingham, WA, USA, 2011. [Google Scholar]
- Zhang, Z.; Yuan, S.; Lai, Q.; Zuo, G.; Guler, H. Bioinspired imbricated microthorn scale surfaces and their abrasive wear performance. J. Asabe 2022, 65, 209–220. [Google Scholar] [CrossRef]
- Zhang, Z.; Zuo, G.; Gan, S.; Chen, Z.; Zhao, L.; Carr, S. EDEM investigation and experimental evaluation of abrasive wear resistance performance of bionic micro-thorn and convex hull geometrically coupled structured surface. In Proceedings of the 2021 American Society of Agricultural and Biological Engineers Annual International Meeting, ASABE 2021, Online, 12–16 July 2021; pp. 2574–2587. [Google Scholar]
- Forsström, D.; Jonsén, P. Calibration and validation of a large scale abrasive wear model by coupling DEM-FEM Local failure prediction from abrasive wear of tipper bodies during unloading of granular material. Eng. Fail. Anal. 2016, 66, 274–283. [Google Scholar] [CrossRef]
- Yan, Y.; Zou, M.; Yao, J.; Yuan, B.; Lin, Y.; Jin, J. Endurance study of bionic wheels for Mars rovers. J. Terramech. 2017, 74, 57–68. [Google Scholar] [CrossRef]
- Mao, C.; Lv, X.; Yang, X.; Yang, Z.; Ma, Y.; Lv, S. Design of convex-hull bionic tire tread compounds and mechanism on collaborative improvement of wet resistance and wear resistance. J. Appl. Polym. Sci. 2021, 138, 50446. [Google Scholar] [CrossRef]
- Zhang, R.; Han, D.; He, Y.; Wan, H.; Ma, S.; Li, J. Drag reduction and wear resistance mechanisms of a bionic shovel by discrete element method simulation. Simul.-Trans. Soc. Model. Simul. Int. 2019, 95, 231–239. [Google Scholar] [CrossRef]
- Gao, T.Y.; Wang, Y.M.; Xie, B.X.; Chen, T.K.; Xu, J.; Zhang, N.; Tang, D.N. The testing and optimization of a bio-inspired textured piston for the BW-250 mud pump. Polym. Test. 2024, 130, 108296. [Google Scholar] [CrossRef]
- Tong, J.; Almobarak, M.A.M.; Ma, Y.; Ye, W.; Zheng, S. Biomimetic Anti-Abrasion Surfaces of a Cone Form Component Against Soil. J. Bionic Eng. 2010, 7, S36–S42. [Google Scholar] [CrossRef]
- Yang, X.; Xia, R.; Zhou, H.; Guo, L.; Zhang, L. Bionic surface design of cemented carbide drill bit. Sci. China-Technol. Sci. 2016, 59, 175–182. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Z.; Sun, Y.; Gao, K.; Liang, Y.; Li, X.; Ren, L. Wear behavior of bionic impregnated diamond bits. Tribol. Int. 2016, 94, 217–222. [Google Scholar] [CrossRef]
- You, C.; Xie, C.; Chu, X.; Zhou, W.; Zhao, G.; Lian, Y. Cutting performance of bionic cutting tools based on surface microstructures of blood clam Tegillarca granosa in dry cutting of CFRP. Int. J. Adv. Manuf. Technol. 2022, 119, 2961–2969. [Google Scholar] [CrossRef]
- Zheng, K.; Yang, F.; Pan, M.; Zhao, G.; Bian, D. Effect of surface line/regular hexagonal texture on tribological performance of cemented carbide tool for machining Ti-6Al-4V alloys. Int. J. Adv. Manuf. Technol. 2021, 116, 3149–3162. [Google Scholar] [CrossRef]
- Su, W.; Zhou, T.; Zhang, P.; Zhou, H.; Li, H.; Sui, Q. Effect of the orientation of laser stripes on the abrasion resistance of biomimetic laser textured surfaces. Opt. Laser Technol. 2018, 107, 380–388. [Google Scholar] [CrossRef]
- Li, W.; Yang, X.; Wang, S.; Xiao, J.; Hou, Q. Research and prospect of ceramics for automotive disc-brakes. Ceram. Int. 2021, 47, 10442–10463. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling of soil-claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Guo, Z.; Du, G.; Li, Z.; Li, X. Orthogonal experiment on resistance reduction by soil-engaging surfaces of bulldozer blade. Trans. CSAM 2015, 46, 372–378. [Google Scholar]
- Zhang, R.; Chen, B.; Li, J.-q.; Xu, S.-c. DEM Simulation of Clod Crushing by Bionic Bulldozing Plate. J. Bionic Eng. 2008, 5, 72–78. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiao, C.; Wang, T.; Cao, J.; Wang, P.; Shi, L. Drag reduction mechanism of the 3D geometry of foreleg’s claw toe of the mole cricket (Gryllotalpa orientalis). Trans. CSAE 2021, 37, 309–315. [Google Scholar]
- Burbaum, U.; Sass, I. Physics of adhesion of soils to solid surfaces. Bull. Eng. Geol. Environ. 2017, 76, 1097–1105. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, L.; Wang, W.; Ren, L.Q.; Shan, H.Y.; Zhang, Z.H. Abrasive particle wear behavior of 3Cr2W8V steel processed to bionic non-smooth surface by laser. Mater. Sci. Eng. A-Struct. Mater. Prop. Microstruct. Process. 2005, 412, 323–327. [Google Scholar] [CrossRef]
- Zhang, R.; Pang, H.; Ji, Q.; Li, G.; Dong, W.; Wen, L.; Li, J. Structure design and traction trafficability analysis of multi-posture wheel-legs bionic walking wheels for sand terrain. J. Terramech. 2020, 91, 31–43. [Google Scholar] [CrossRef]
- Zhang, F.; Qiu, Y.; Teng, S.; Cui, X.; Wang, X.; Sun, H.; Ali, S.; Guo, Z.; Wang, J.; Fu, S. Design and Test of Tread-Pattern Structure of Biomimetic Goat-Sole Tires. Biomimetics 2022, 7, 236. [Google Scholar] [CrossRef]
- Xue, L.; Xie, B.; Lin, F.; Cheng, S.; Li, L.; Liu, M.; Li, J. Field Traction Performance Test Analysis of Bionic Paddy Wheel and Vaned Wheel. Biomimetics 2022, 7, 185. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Li, J.; Zhang, G.; Huang, H. Mechanical characteristics of bionic walking foot on soft sand. Trans. CSAM 2016, 47, 384–389. [Google Scholar]
- Tang, Z.; Gong, H.; Wu, S.; Zeng, Z.; Wang, Z.; Zhou, Y.; Fu, D.; Liu, C.; Cai, Y.; Qi, L. Modelling of paddy soil using the CFD-DEM coupling method. Soil Tillage Res. 2023, 226, 105591. [Google Scholar] [CrossRef]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









| Bionic Prototype | Components | Methods | Working Parameter | Components Performance | Ref. |
|---|---|---|---|---|---|
| Mole cricket (forefoot) | Subsoiler | DEM simulation | Crank speed 100 rpm | Horizontal resistance 16.34%↓ Vertical resistance 24.53%↓ Energy consumption 9.64%↓ | [8] |
| Rotary blade | DEM simulation | Rotary speed 300 rpm Forward speed 0.66 m/s | Power consumption 14.62%↓ | [24] | |
| Mole rat (claw) | Rotary blade | Field test | Rotary speed 220 rpm Forward speed 0.5 m/s Tillage depth 120 mm | Torque 3.91%↓ Tillage depth stability > 93.59% | [28] |
| Rotary blade | Field test | Rotary speed 300 rpm Forward speed 0.1 m/s Tillage depth 70 mm | Torque 21.05%↓ Power requirement↓ | [29] | |
| Cutting disc | FEM simulation | Rotary speed 300 rpm Forward speed 1.5 m/s | Combined stress 34.33%↓ Normal stress 22.64%↓ | [26] | |
| Disc | Soil bin test | Forward speed 1 km/h | Mean vertical resistance 21.4%↓ Mean draught force 28.7%↓ | [30] | |
| Disc | Field test | Speed 0.1 m/s Tillage depth 40 mm | Draught force 22.8%↓ | [31] | |
| Digging Shovel | Field test | Forward speed 0.56 m/s Digging depth 250 mm | Draught force 13.33%↓ Fuel consumption 9.18%↓ | [32] | |
| Rotary blade | Soil bin test | Rotary speed 160–320 rpm Forward speed 3 km/h Operating depth 80 mm | Mean torque requirement 13.99%↓ | [34] | |
| Subsoiler | Field test | Forward speed 1.8 m/s Tillage depth 460 mm | Draft force 18.61%↓ Soil looseness 20.6%↑ | [35] | |
| Mouse (claw) | Subsoiler | Soil bin test | Forward speed 0.192 m/s Tillage depth 350 mm | Horizontal resistance 7.1%↓ Vertical resistance 24.0%↓ | [36] |
| Subsoiler | Field test | Forward speed 2 km/h Tillage depth 350 mm | Draft force 8.9%↓ | [38] | |
| Badger (claw) | Cutter teeth | FEM simulation | Rotary speed 450 rpm Forward speed 1.5 km/h Cutting depth 50 mm | Cutting resistance↓ Kinetic energy↑ | [10] |
| Bucket teeth | Wedging test | Cutting speed 1 m/min Cutting depth 40 mm | Buried resistance 12.6%↓ | [41] | |
| Badger (teeth) | Specimen | FEM simulation | Cutting speed 4 mm/s Penetration depth 50 mm | Penetration force 26.15%↓ | [47] |
| Furrow opener | Soil bin test | Operating speed 7.2 km/h Operating depth 50 mm | Working resistance 8.71%↓ | [48] | |
| Bear (claw) | Plowing device | DEM simulation | Rotating speed 260 rpm Forward speed 0.3 m/s Plowing depth 128 mm | Power consumption 34.9%↓ Specific energy consumption 5.22%↓ | [49] |
| Anteater (claw) | Shovel | Field test | Forward speed 0.83 m/s Tillage depth 250 mm | Tillage resistance 8.11%↓ Soil disturbance 20.26%↓ | [52] |
| Shark (skin) | Subsoiler | Soil bin test | Cultivation speed 2.1 km/h. Depth 200 mm | Horizontal resistance 21.3%↓ Vertical resistance 24.8%↓ | [55] |
| Subsoiler | Soil bin test | Operation speed 3.6 km/h Tillage depth 400 mm | Tillage resistance 60.4%↓ | [57] | |
| Mole (digging) | Subsoiling mechanism | DEM simulation | Rotational speed 100 rpm Forward speed 0.5 m/s | Drag resistance 18.4%↓ Soil disturbance 312.78%↑ | [65] |
| Cleaner | DEM simulation | Forward speed 2.22 m/s | Working resistances 49.4%↓ Straw cleaning rate 11.2%↑ | [66] | |
| Hare (digging) | Profiling energy storage device | Field test | Operating velocity 4–5 km/h Tillage depth 400 mm | Fuel consumption 16.1%↓ Soil disturbance↓ | [71] |
| Earthworm (wriggling) | Probe | Penetration test | Penetration speed 2 mm/s Penetration depth 100 mm | Penetration resistance 80%↓ | [76] |
| Antlion larva (vibration)e | Subsoiler | Field test | Forward speed 3–7 km/h Tillage depth 300 mm | Working resistance 14.2–21.2%↓ Energy consumption 11.2–16.5%↓ | [83] |
| Locust (biting) | Cutting blade | Soil bin test | Rotation speed 930 rpm Forward speed 6 km/h | Cutting energy 9.4–11.7%↓ Power consumption 10.4–14.7%↓ | [87] |
| Ant (biting) | Cutting blade | Field test | Rotation speed 240 rpm Forward speed 3 km/h | Cutting torque 15.4%↓ Power consumption 11%↓ | [89] |
| Root (growing) | Probe | Penetration test | Penetration speed 10 mm/min Penetration depth 150 mm | Penetration resistance 13.4%↓ Energy consumption 13.02%↓ | [91] |
| Bionic Prototype | Components | Working Parameter | Components Performance | Ref. |
|---|---|---|---|---|
| Shell | Ridged surface | Sliding distance 82 m | Mass loss 63%↓ | [142] |
| Subsoiler tine | Sliding speed 3.02 m/s Sliding distance 4100 m | Mass loss 30%↓ | [143] | |
| Shell/Pangolin quama | Subsoiler sample | Sliding speed 1.68 m/s | Mass loss↓ Wear resistance 77%↑ | [144] |
| Sweep | Wear speed 2 m/s Wear distance 6427.2 m | Mass loss 34.355%↓ | [11] | |
| Sandfish | Specimen | Wear distance 11,400 m | Mass loss 72.7%↓ | [150] |
| Earthworm | Mud pump piston | Rotating speed 2.67 rpm Pressure 0.1 MPa | Mass loss↓ Temperature value↓ | [156] |
| Non-smooth morphology | Wheel | Wear time 40 h | Mass loss 46%↓ Energy consumption 26%↓ | [153] |
| Tire | Applied force 750 g Friction distance 40 m | Wear resistance 9%↓ Sliding ability 3.4% (sand)/4.2% (glass)↑ | [154] | |
| Cone | Wear speed 2.35 m/s | Mass loss 54.04%↓ | [157] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Qi, H.; Gao, P.; Wang, S.; Liu, X.; Ma, Y. Biomimetic Design of Soil-Engaging Components: A Review. Biomimetics 2024, 9, 358. https://doi.org/10.3390/biomimetics9060358
Xu Z, Qi H, Gao P, Wang S, Liu X, Ma Y. Biomimetic Design of Soil-Engaging Components: A Review. Biomimetics. 2024; 9(6):358. https://doi.org/10.3390/biomimetics9060358
Chicago/Turabian StyleXu, Zihe, Hongyan Qi, Peng Gao, Shuo Wang, Xuanting Liu, and Yunhai Ma. 2024. "Biomimetic Design of Soil-Engaging Components: A Review" Biomimetics 9, no. 6: 358. https://doi.org/10.3390/biomimetics9060358
APA StyleXu, Z., Qi, H., Gao, P., Wang, S., Liu, X., & Ma, Y. (2024). Biomimetic Design of Soil-Engaging Components: A Review. Biomimetics, 9(6), 358. https://doi.org/10.3390/biomimetics9060358