

A Grey Wolf Optimizer Algorithm for Multi-Objective Cumulative Capacitated Vehicle Routing Problem Considering Operation Time

Abstract
1. Introduction
2. Problem Description and Mathematical Model
- Disaster Response Scope: The model is designed with the intent of comprehensively addressing the immediate impact of an initial disaster across multiple points. The objective is to optimize the distribution routes to ensure that essential supplies reach all affected locations promptly. We disregard potential damage from aftershocks or secondary disasters, as well as the possibility of transportation failures due to the initial or secondary disaster;
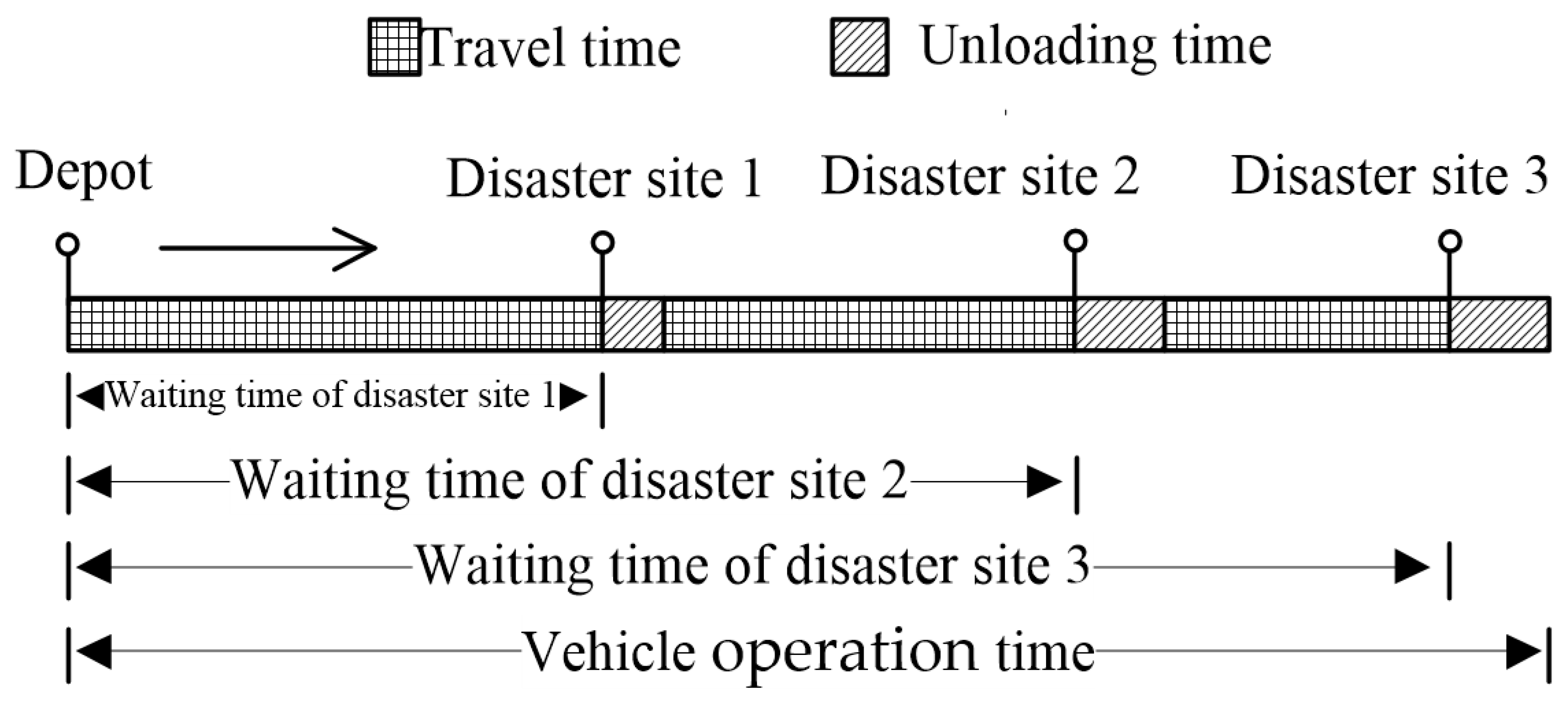
- Wait Time Consideration: The elapsed time from when a disaster occurs to the moment a relief vehicle (or truck) arrives at an affected point is referred to as the “wait time” of that point. To assess the overall effectiveness of a relief strategy, the wait times of all points (or all locations affected by the disaster) are added up. The model does not factor in the transportation priority that might arise from emergency triage considerations or the scale of the affected population at each site;
- Deterministic Model Parameters: The proposed model operates on a deterministic basis, meaning that the affected population and the so-called “fuzzy” demand—or uncertain and variable demand—at the disaster-affected sites are assessed and estimated in advance of the optimization process;
- Focus on Timeliness and Safety: In emergency rescue scenarios, timeliness requirements and transportation safety are prioritized [53]. Fuel consumption or environmental impacts like CO2 emission are ignored. However, the maximum operation time of the vehicles is considered, analogous to limiting their fuel capacity;
- Definition of Operation Time: For each vehicle, the operational time spans from the moment it departs from the depot until it reaches the final disaster-affected point on its itinerary. This encompasses the entirety of the route that the vehicle travels while carrying out its rescue assignment.
3. Design of the Dynamic Grey Wolf Optimizer Algorithm with Floating 2-opt
3.1. Encoding Method and Decoding Strategy
3.2. Multi-Objective Evaluation Mechanism for Grey Wolf Individuals
3.3. Dynamic Non-Dominated Solution Set Update Strategy
- If , FitnessSet and PosVecSet will not be updated, and the traversal will stop;
- If , the non-dominated solution j will be replaced by i as follows: the jth elements in FitnessSet and PosVecSet will be updated with the fitness and the position vectors of i; the traversal will continue to compare subsequent non-dominated solutions. If other non-dominated solutions are dominated by i, the relevant elements in the fitness set and position set of other non-dominated solutions will be deleted;
- If the traversal process is completed, and the solution represented by i is neither dominated by any solution within the non-dominated solution set nor does it dominate any of those solutions, then i will be considered a non-dominated solution and subsequently added to the non-dominated solution set. Consequently, the fitness of i will be added to FitnessSet as a new element, and the positional vector of i will be incorporated into PosVecSet;
- If the number of elements in both FitnessSet and PosVecSet exceeds MP, the original element exit operation will start as follows: according to the fitness values of the first dimension of the elements in FitnessSet, the interval from the minimum value to the maximum value will be equally divided into 10 sub-intervals with the same range. The number of elements in each of these sub-intervals will be calculated. A solution will be selected randomly from the sub-interval with the largest number of elements, and the elements in FitnessSet and PosVecSet will be deleted accordingly.
3.4. Grey Wolf Operation Update
3.5. Fitness Function
3.6. Improved Multi-Objective Local Search Strategy
- After the two edges are transformed, the comprehensive fitness of all disaster-affected points on the path will decrease;
- In the path obtained by transforming two edges, the total vehicle operation time upon delivery shall not exceed TOPMax.
3.7. Algorithm Steps
4. Experiments and Analysis
4.1. Experiment Instances and Environment
4.2. Experiment Results and Analysis
- The maximum number of non-dominated solutions is six, and the minimum value is one, indicating that the algorithm is effective in solving dual-constraint (load and operation time constraints) problems;
- The maximum running time is 28.4 s, while the minimum is 15.821 s. The difference in each run is due to the fact that local optimization will only be performed in the algorithm when it meets the load constraint. The number of times the local search strategy is run varies due to the randomness of the algorithm.
- In the utopia optimum solution, six vehicles are used. The total load capacities of vehicles on the six paths are 139, 115, 108, 108, 68, and 80, respectively, all of which are within the capacity limit of 140, meeting the number of vehicles constraint in Equation (4) and the load capacity constraint in Equation (6). The total load capacity of the six paths is equal to the total delivery demand required by the disaster-affected points, meeting the needs of these points;
- For the solution paths of the utopia optimum solution, each vehicle will visit at least one disaster-affected point. Each disaster-affected point belongs to, and only belongs to, one simple loop, with each loop starting from and ending at the depot, meeting the constraints between the vehicle, path, and disaster-affected point in Equations (3) and (5). The operation times of vehicles on the six paths are 163, 139, 150, 155, 101, and 94, respectively, all of which are within the maximum operation time of 240. There are four vehicles that exceed the rated operation time of 120, which results in additional expenditures. The total overtime amount is 127, and the additional expenditure for overtime is 2540.
- In the utopia optimum solution, the wait times of each disaster-affected point on the six paths are 577, 493, 593, 689, 308, and 137, respectively, for a total of 2797. The sums of the vehicle arrival times on all paths are relatively even, indicating that the output solution is high quality.
- The maximum number of non-dominated solutions solved by DGWO is 3, while the minimum is 1, and the average is 1.2. The maximum number of non-dominated solutions solved by DGWO-2OPT is 4, while the minimum is 1, and the average is 1.6. The average number of non-dominated solutions solved by DGWO-F2OPT is 2.2. DGWO-F2OPT obtained more non-dominated solutions than DGWO-2OPT and DGWO, while DGWO obtained the fewest non-dominated solutions. In terms of the number of non-dominated solutions, DGWO-F2OPT has a stronger solving capability than DGWO-2OPT and DGWO;
- DGWO has a maximum run time of 6.976, a minimum run time of 6.618, and an average run time of 6.796. By contrast, DGWO-2OPT has a maximum run time of 19.894, a minimum run time of 15.536, and an average run time of 17.467. The average run time of DGWO-F2OPT is 21.086. DGWO-2OPT has a shorter run time than DGWO-F2OPT, while DGWO has the shortest run time. The major reason for the difference in computation times is due to the larger number of non-dominated solutions obtained by DGWO-F2OPT and the higher number of local optimizations, which results in a longer computation time;
- The average value of fitness of DGWO is 6089.5, while that of DGWO-2OPT and DGWO-F2OPT are respectively 2845.5 and 2668.5. Obviously, DGWO is much weaker than DGWO-2OPT and DGWO-F2OPT in terms of the accuracy of the algorithms. The average value of two fitness values of the utopia optimum solution of DGWO-F2OPT is 6.22% smaller than that of DGWO-2OPT.
- The non-dominated solutions of DGWO-F2OPT are of better quality than those of DGWO-2OPT. DGWO-F2OPT can obtain solutions with lower numerical values for both Z1 and Z2, while DGWO-2OPT can only obtain solutions with lower numerical values for Z1, resulting in the uneven distribution of solutions at the Pareto boundary. It can be concluded that the DGWO-F2OPT algorithm has a better search capability;
- For the non-dominated solutions of DGWO-F2OPT, the utopia point in the bi-objective plane is (2723, 2420), and the utopia optimum is (2797, 2540). The utopia point and the utopia optimum for DGWO-2OPT are (2845, 2620) and (2911, 2780), respectively. The utopia point and the utopia optimum DGWO-F2OPT achieves have smaller values than those DGWO-F2OPT obtains. From the perspective of the utopia point and the utopia optimum of both algorithms, DGWO-F2OPT obtains higher quality solutions than DGWO-F2OPT;
- The average value of the twelve finesses value of six solutions of DGWO-F2OPT is 2827.5, while that of the eight finesses value of four solutions of DGWO-2OPT is 2948.25. The average value of the finesses of DGWO-F2OPT is smaller than that of DGWO-2OPT. From the perspective of the average value of finesses of both algorithms, DGWO-F2OPT has a better solving ability.
- The optimization outcomes achieved by DGWO-F2OPT, which incorporates the floating 2-opt local search strategy introduced in this study, are superior to those obtained with DGWO-2OPT. It is evident that the local search method employed here leverages a comprehensive fitness approach (for expenditure calculation based on wait time) that is aptly tailored for addressing MO-CCVRP-OT. This strategy not only enhances the global convergence potential of the algorithm but also bolsters the precision of the solutions it yields. Furthermore, the floating 2-opt component of the local search strategy contributes significantly to the algorithm’s refined local searching capabilities;
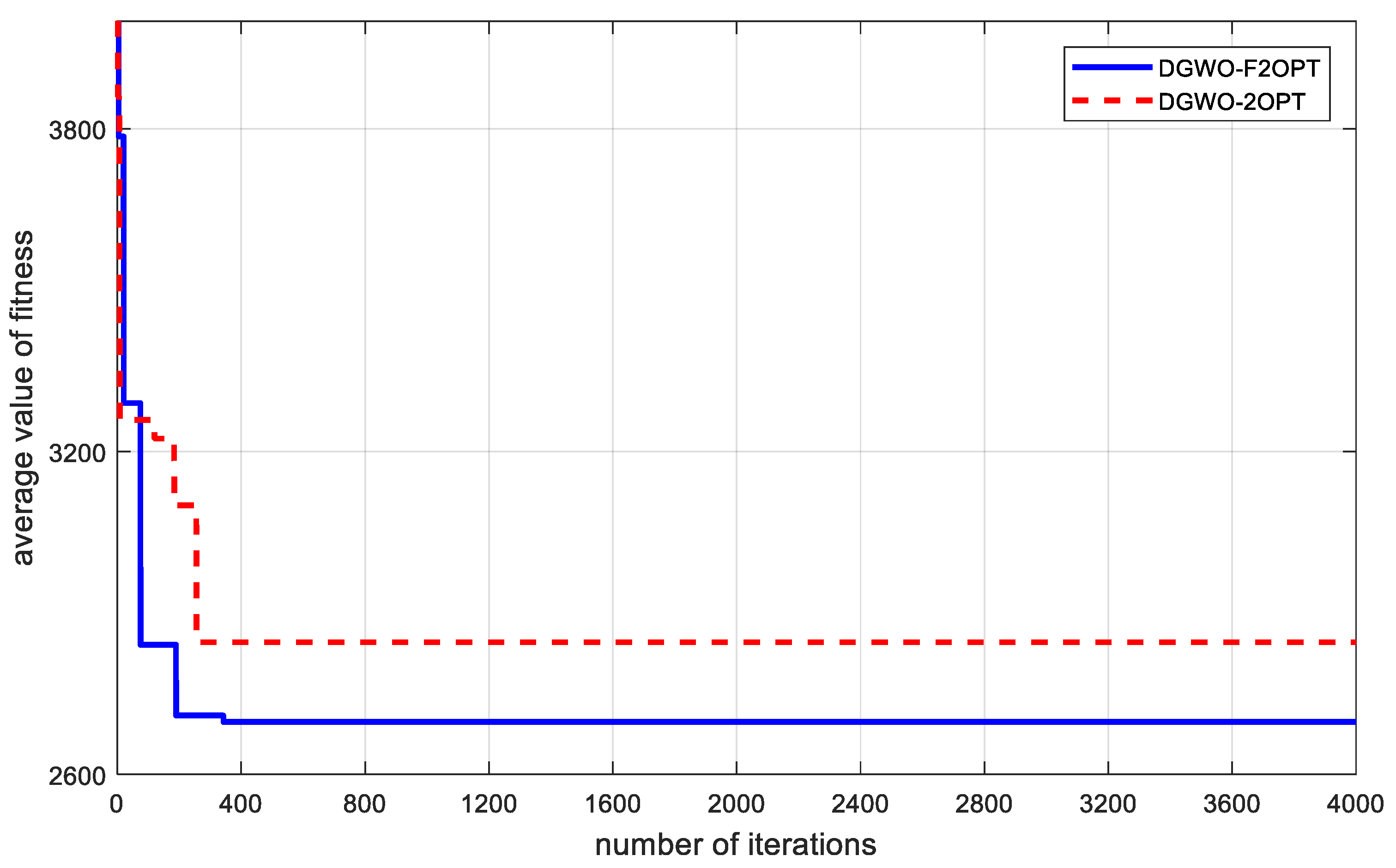
- Since a multi-objective problem makes searching for a solution more difficult, we set the iteration number to 4000 to exhaust the solution finding. Results show that two algorithms reach convergence before 400 iterations. This implies that the floating 2-opt local search strategy improves the convergence speed to a great extent. Meanwhile, from the running time in Table 9, the average running times of DGWO-F2OPT and DGWO-2OPT are respectively 21.086s and 17.467s. The algorithms are acceptable regarding the solving time spent.
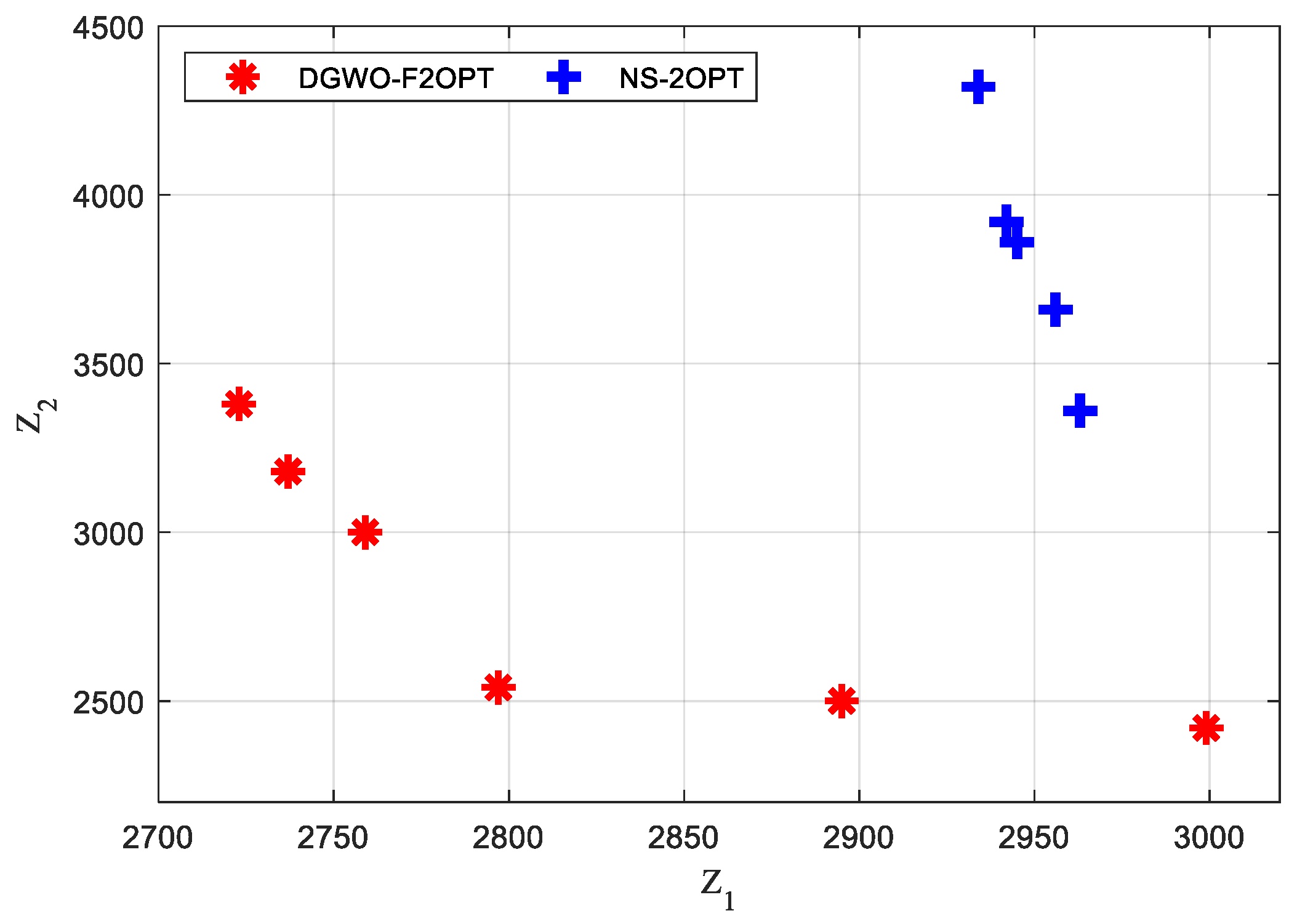
- For the non-dominated solutions of DGWO-F2OPT, the utopia point in the bi-objective plane is (2723, 2420), and the utopia optimum is (2797, 2540). The utopia point and the utopia optimum for NS-2OPT are (2934, 3360) and (2963, 3360), respectively. The utopia point and the utopia optimum DGWO-F2OPT achieves have smaller values than those DGWO-F2OPT obtains. From the perspective of the utopia point and the utopia optimum of both algorithms, DGWO-F2OPT obtains higher-quality solutions than DGWO-F2OPT;
- The average value of the 12 finesses value of six solutions of DGWO-F2OPT is 2827.5, while that of the 10 finesses value of four solutions of NS-2OPT is 3386. The average value of finesses of DGWO-F2OPT is 16.49% smaller than that of NS-2OPT. From the perspective of the average value of finesses of both algorithms, DGWO-F2OPT has better solving ability.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Crawford-Brown, D.; Syddall, M.; Guan, D. Modeling Imbalanced Economic Recovery Following a Natural Disaster Using Input-Output Analysis. Risk Anal. 2013, 33, 1908–1923. [Google Scholar] [CrossRef]
- United Nations Office for Disaster Risk Reduction. UN 20-Year Review: Earthquakes and Tsunamis Kill More People while Climate Change is Driving Up Economic Losses. Available online: https://www.undrr.org/quick/10729 (accessed on 9 June 2023).
- Wang, S.L.; Sun, B.Q. Model of multi-period emergency material allocation for large-scale sudden natural disasters in humanitarian logistics: Efficiency, effectiveness and equity. Int. J. Disaster Risk Reduct. 2023, 85, 103530. [Google Scholar] [CrossRef]
- Campbell, A.M.; Vandenbussche, D.; Hermann, W. Routing for relief efforts. Transp. Sci. 2008, 42, 127–145. [Google Scholar] [CrossRef]
- Ngueveu, S.U.; Prins, C.; Calvo, R.W. An effective memetic algorithm for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2010, 37, 1877–1885. [Google Scholar] [CrossRef]
- Mattos Ribeiro, G.; Laporte, G. An adaptive large neighborhood search heuristic for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2012, 39, 728–735. [Google Scholar] [CrossRef]
- Ke, L.; Feng, Z. A two-phase metaheuristic for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2013, 40, 633–638. [Google Scholar] [CrossRef]
- Ogryczak, W. Inequality measures and equitable locations. Ann. Oper. Res. 2009, 167, 61–86. [Google Scholar] [CrossRef]
- Nucamendi-Guillen, S.; Angel-Bello, F.; Martinez-Salazar, I.; Cordero-Franco, A.E. The cumulative capacitated vehicle routing problem: New formulations and iterated greedy algorithms. Expert Syst. Appl. 2018, 113, 315–327. [Google Scholar] [CrossRef]
- Rivera, J.C.; Afsar, H.M.; Prins, C. A multistart iterated local search for the multitrip cumulative capacitated vehicle routing problem. Comput. Optim. Appl. 2015, 61, 159–187. [Google Scholar] [CrossRef]
- Zeng, Z.-Y.; Xu, W.-S.; Xu, Z.-Y.; Liu, Z.-X. Cumulative multi-depot vehicle routing problem in emergency logistics. Kongzhi Yu Juece Control Decis. 2014, 29, 2183–2188. [Google Scholar] [CrossRef]
- Rivera, J.C.; Afsar, H.M.; Prins, C. Mathematical formulations and exact algorithm for the multitrip cumulative capacitated single-vehicle routing problem. Eur. J. Oper. Res. 2016, 249, 93–104. [Google Scholar] [CrossRef]
- PEI, H.; DENG, Y.; LU, H. Research on Cumulative Heterogeneous Fleet Emergency Vehicle Routing Problem with Demands Weighting. J. Ordnance Equip. Eng. 2018, 39, 136–142+162. [Google Scholar]
- Lalla-Ruiz, E.; Voc, S. A POPMUSIC approach for the Multi-Depot Cumulative Capacitated Vehicle Routing Problem. Optim. Lett. 2020, 14, 671–691. [Google Scholar] [CrossRef]
- Ke, L. A brain storm optimization approach for the cumulative capacitated vehicle routing problem. Memetic Comput. 2018, 10, 411–421. [Google Scholar] [CrossRef]
- Sze, J.F.; Salhi, S.; Wassan, N. The cumulative capacitated vehicle routing problem with min-sum and min-max objectives: An effective hybridisation of adaptive variable neighbourhood search and large neighbourhood search. Transp. Res. Part B-Methodol. 2017, 101, 162–184. [Google Scholar] [CrossRef]
- Kyriakakis, N.A.; Marinaki, M.; Marinakis, Y. A hybrid ant colony optimization-variable neighborhood descent approach for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2021, 134, 105397. [Google Scholar] [CrossRef]
- Dong, R.; Liu, R.; Jiang, Z.B.; Ren, P. A Tabu Search Algorithm for the Cumulative Capacitated Vehicle Routing Problem with Time Window. Ind. Eng. Manag. 2015, 20, 49–55. [Google Scholar] [CrossRef]
- Liu, R.; Jiang, Z. A hybrid large-neighborhood search algorithm for the cumulative capacitated vehicle routing problem with time-window constraints. Appl. Soft Comput. J. 2019, 80, 18–30. [Google Scholar] [CrossRef]
- Kyriakakis, N.A.; Sevastopoulos, I.; Marinaki, M.; Marinakis, Y. A hybrid Tabu search—Variable neighborhood descent algorithm for the cumulative capacitated vehicle routing problem with time windows in humanitarian applications. Comput. Ind. Eng. 2022, 164, 107868. [Google Scholar] [CrossRef]
- Farzadnia, F.; Bektas, T.; Lysgaard, J. The cumulative school bus routing problem: Polynomial-size formulations. Networks 2023, 82, 571–591. [Google Scholar] [CrossRef]
- Tarhan, I.; Zografos, K.G.; Sutanto, J.; Kheiri, A.A.; Suhartanto, H. A multi-objective rolling horizon personnel routing and scheduling approach for natural disasters. Transp. Res. Part C Emerg. Technol. 2023, 149, 104029. [Google Scholar] [CrossRef]
- Li, J.J.; Fang, Y.H.Q.; Tang, N. A cluster-based optimization framework for vehicle routing problem with workload balance. Comput. Ind. Eng. 2022, 169, 108221. [Google Scholar] [CrossRef]
- Feng, B.; Wei, L.X. An improved multi-directional local search algorithm for vehicle routing problem with time windows and route balance. Appl. Intell. 2023, 53, 11786–11798. [Google Scholar] [CrossRef]
- Wang, C.; Ma, B.; Sun, J.Y. A co-evolutionary genetic algorithm with knowledge transfer for multi-objective capacitated vehicle routing problems. Appl. Soft Comput. 2023, 148, 110913. [Google Scholar] [CrossRef]
- Amiri, A.; Amin, S.H.; Zolfagharinia, H. A bi-objective green vehicle routing problem with a mixed fleet of conventional and electric trucks: Considering charging power and density of stations. Expert Syst. Appl. 2023, 213, 119228. [Google Scholar] [CrossRef]
- Elgharably, N.; Easa, S.; Nassef, A.; El Damatty, A. Stochastic Multi-Objective Vehicle Routing Model in Green Environment With Customer Satisfaction. Ieee Trans. Intell. Transp. Syst. 2023, 24, 1337–1355. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.H.; Wang, Z.Y.; Li, W.; Hou, T.J.; Yang, X.Y.; Zhao, Z.Z.; Wang, Z.F.; Sun, T. Heterogeneous Fleets for Green Vehicle Routing Problem With Traffic Restrictions. Ieee Trans. Intell. Transp. Syst. 2023, 24, 8667–8676. [Google Scholar] [CrossRef]
- Kuo, R.J.; Luthfiansyah, M.F.; Masruroh, N.A.; Zulvia, F.E. Application of improved multi-objective particle swarm optimization algorithm to solve disruption for the two-stage vehicle routing problem with time windows. Expert Syst. Appl. 2023, 225, 120009. [Google Scholar] [CrossRef]
- Comert, S.E.; Yazgan, H.R. A new approach based on hybrid ant colony optimization-artificial bee colony algorithm for multi-objective electric vehicle routing problems. Eng. Appl. Artif. Intell. 2023, 123, 106375. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, J.; Sun, Y.; Fan, J.; Wang, Z.; Wang, H. Collaborative multidepot electric vehicle routing problem with time windows and shared charging stations. Expert Syst. Appl. 2023, 219, 119654. [Google Scholar] [CrossRef]
- Liang, X.Y.; Wang, N.M.; Zhang, M.; Jiang, B. Bi-objective multi-period vehicle routing for perishable goods delivery considering customer satisfaction. Expert Syst. Appl. 2023, 220, 119712. [Google Scholar] [CrossRef]
- Menares, F.; Montero, E.; Paredes-Belmar, G.; Bronfman, A. A bi-objective time-dependent vehicle routing problem with delivery failure probabilities. Comput. Ind. Eng. 2023, 185, 109601. [Google Scholar] [CrossRef]
- Soriano, A.; Gansterer, M.; Hartl, R.F. The multi-depot vehicle routing problem with profit fairness. Int. J. Prod. Econ. 2023, 255, 108669. [Google Scholar] [CrossRef]
- Wang, Q.; Li, H.; Wang, D.; Cheng, T.C.E.; Yin, Y. Bi-objective perishable product delivery routing problem with stochastic demand. Comput. Ind. Eng. 2023, 175, 108837. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, S.Y.; Fan, J.X.; Xu, M.Z.; Wang, H.Z. Compensation and profit allocation for collaborative multicenter vehicle routing problems with time windows. Expert Syst. Appl. 2023, 233, 120988. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, Y.; Wang, X.; Wang, Z.; Wang, H. A clustering-based extended genetic algorithm for the multidepot vehicle routing problem with time windows and three-dimensional loading constraints. Appl. Soft Comput. 2023, 133, 109922. [Google Scholar] [CrossRef]
- Yin, N. Multiobjective Optimization for Vehicle Routing Optimization Problem in Low-Carbon Intelligent Transportation. Ieee Trans. Intell. Transp. Syst. 2023, 24, 13161–13170. [Google Scholar] [CrossRef]
- Al Theeb, N.; Abu-Aleqa, M.; Diabat, A. Multi-objective optimization of two-echelon vehicle routing problem: Vaccines distribution as a case study. Comput. Ind. Eng. 2024, 187, 109590. [Google Scholar] [CrossRef]
- Cai, Y.Q.; Lin, Z.F.; Cheng, M.Q.; Liu, P.Z.; Zhou, Y. Solving Multi-Objective Vehicle Routing Problems with Time Windows: A Decomposition-Based Multiform Optimization Approach. Tsinghua Sci. Technol. 2024, 29, 305–324. [Google Scholar] [CrossRef]
- Li, H.; Li, G.H.; Jiang, Q.Y.; Wang, J.S.; Wang, Z.K. MOEA/D with customized replacement neighborhood and dynamic resource allocation for solving 3L-SDHVRP. Swarm Evol. Comput. 2024, 85, 101463. [Google Scholar] [CrossRef]
- Pilati, F.; Tronconi, R. Multi-objective optimisation for sustainable few-to-many pickup and delivery vehicle routing problem. Int. J. Prod. Res. 2024, 62, 3146–3175. [Google Scholar] [CrossRef]
- Wang, X.; Choi, T.-M.; Li, Z.; Shao, S. An Effective Local Search Algorithm for the Multidepot Cumulative Capacitated Vehicle Routing Problem. Ieee Trans. Syst. Man Cybern. Syst. 2020, 50, 4948–4958. [Google Scholar] [CrossRef]
- Wang, X.; Choi, T.-M.; Liu, H.; Yue, X. A novel hybrid ant colony optimization algorithm for emergency transportation problems during post-disaster scenarios. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 545–556. [Google Scholar] [CrossRef]
- Gragnaniello, L.; Iasiello, M.; Mauro, G.M. Multi-Objective Optimization of a Heat Sink for the Thermal Management of a Peltier-Cell-Based Biomedical Refrigerator. Energies 2022, 15, 7352. [Google Scholar] [CrossRef]
- Bianco, N.; Fragnito, A.; Iasiello, M.; Mauro, G.M. A CFD multi-objective optimization framework to design a wall-type heat recovery and ventilation unit with phase change material. Appl. Energy 2023, 347, 121368. [Google Scholar] [CrossRef]
- Qian, J.; Sun, X.; Zhong, X.; Zeng, J.; Xu, F.; Zhou, T.; Shi, K.; Li, Q. Multi-objective optimization design of the wind-to-heat system blades based on the Particle Swarm Optimization algorithm. Appl. Energy 2024, 355, 122186. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Zhang, H.L.; Cai, Z.N.; Xiao, L.; Heidari, A.A.; Chen, H.L.; Zhao, D.; Wang, S.H.; Zhang, Y.D. Face Image Segmentation Using Boosted Grey Wolf Optimizer. Biomimetics 2023, 8, 484. [Google Scholar] [CrossRef]
- Zamfirache, I.A.; Precup, R.E.; Roman, R.C.; Petriu, E.M. Neural Network-based control using Actor-Critic Reinforcement Learning and Grey Wolf Optimizer with experimental servo system validation. Expert Syst. Appl. 2023, 225, 120112. [Google Scholar] [CrossRef]
- ZainEldin, H.; Gamel, S.A.; El-Kenawy, E.M.; Alharbi, A.H.; Khafaga, D.S.; Ibrahim, A.; Talaat, F.M. Brain Tumor Detection and Classification Using Deep Learning and Sine-Cosine Fitness Grey Wolf Optimization. Bioeng.-Basel 2023, 10, 18. [Google Scholar] [CrossRef]
- Yin, C.; Mao, S.H. Fractional multivariate grey Bernoulli model combined with improved grey wolf algorithm: Application in short-term power load forecasting. Energy 2023, 269, 126844. [Google Scholar] [CrossRef]
- Lu, Y.C.; Yang, J.; Yang, C. A humanitarian vehicle routing problem synchronized with drones in time-varying weather conditions. Comput. Ind. Eng. 2023, 184, 109563. [Google Scholar] [CrossRef]
- CAI, Y.; CHEN, H.; QI, Y. Variable Neighborhood Quantum Fireworks Algorithm for Solving CVRP. Comput. Eng. Appl. 2019, 55, 230–236. [Google Scholar] [CrossRef]
- Liu, A.; Liu, F.X.; Feng, X.Y.; Deng, X.D.; Liu, B.; Ren, L. Memetic fireworks algorithm for solving N-vehicle exploration problem. Kongzhi Yu Juece Control Decis. 2018, 33, 1757–1766. [Google Scholar] [CrossRef]
- Ou, Y.; Yin, P.F.; Mo, L.P. An Improved Grey Wolf Optimizer and Its Application in Robot Path Planning. Biomimetics 2023, 8, 84. [Google Scholar] [CrossRef]
- Rattanamanee, T.; Nanthavanij, S. Heuristic procedure for bi-capacitated multiple-trip vehicle routing problem. Eur. J. Ind. Eng. 2022, 16, 294–316. [Google Scholar] [CrossRef]
- Macias, J.E.; Angeloudis, P.; Ochieng, W. Optimal hub selection for rapid medical deliveries using unmanned aerial vehicles. Transp. Res. Part C Emerg. Technol. 2020, 110, 56–80. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Is Total Wait Time of All Point Considered | Is Workload Balance of Vehicles Considered |
|---|---|---|
| Wang et al. (2023) [25] | No | Yes |
| Amiri et al. (2023) [26] | No | No |
| Elgharably et al. (2023) [27] | No | No |
| Wang et al. (2023) [28] | No | No |
| Kuo et al. (2023) [29] | No | No |
| Comert et al. (2023) [30] | No | No |
| Wang et al. (2023) [31] | No | No |
| Liang et al. (2023) [32] | No | No |
| Menares et al. (2023) [33] | No | No |
| Soriano et al. (2023) [34] | No | No |
| Wang et al. (2023) [35] | No | No |
| Wang et al. (2023) [36] | Yes | No |
| Wang et al. (2023) [37] | No | No |
| Yin (2024) [38] | No | No |
| Al Theeb et al. (2024) [39] | No | No |
| Cai et al. (2024) [40] | No | No |
| Li et al. (2024) [41] | No | No |
| Pilati and Tronconi [42] | No | No |
| This Paper | Yes | Yes |
| Nomenclature | Meaning |
|---|---|
| Sets: | |
| N | Node set, |
| P | Disaster point set, P = {2, 3, …, n} |
| R | Depot set, Its value is {1} |
| Indices: | |
| i, j | Index of Node set |
| k | Index of Vehicles |
| Parameters: | |
| n | Number of nodes |
| qi | Transportation of disaster point i |
| yi | Unloading time in disaster point i |
| di,j | Travel distance from i to j |
| V | Maximum number of vehicles available in the depot |
| intermediate variable | |
| TActk | Actual operation time of each vehicle k |
| Constants: | |
| s | Travel speed of vehicles |
| U | Upper limit of vehicle load |
| TNormal | Rated operation time of vehicles |
| FOPOver | Additional expenditure per unit time for the excess part when the actual running time of the vehicle exceeds TNormal |
| TOPMax | Maximum operation time of vehicles |
| Decision variable: | |
| ai,j,k | 1 when vehicle k travel from node i to j, otherwise 0 |
| bi,k | 1 when vehicle K accesses node i, otherwise 0 |
| TCUMi,k | Wait time of point i when vehicle k arrives at node i, when bi,k = 0, TCUMi,k = 0 |
| Constraint Catalog | Constraint Name | Constraints Considered by Our Model |
|---|---|---|
| Road network | Symmetry | Symmetric |
| Measurement | 2-D Euclidean distance | |
| Vehicles | Vehicles type | Homogeneous |
| Limitation | Load capacity | |
| Customer (disaster sites) | Priority | Unprioritized |
| Visit times | One Visit | |
| Is good splittable | Unsplittable | |
| Depot | Capacity | Unlimited |
| Number | Single | |
| Time Period | One span within a day |
| No. | x-Coordi- Nates (km) | y-Coordi- Nates (km) | Demands (cwt) | Unloading Time (m) | No. | x-Coordi- Nates (km) | y-Coordi- Nates (km) | Demands (cwt) | Unloading Time (m) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 30 | 40 | 0 | 0 | 21 | 57 | 58 | 28 | 9 |
| 2 | 37 | 52 | 7 | 2 | 22 | 62 | 42 | 8 | 3 |
| 3 | 49 | 49 | 30 | 10 | 23 | 42 | 57 | 8 | 3 |
| 4 | 52 | 64 | 16 | 5 | 24 | 16 | 57 | 16 | 5 |
| 5 | 20 | 26 | 9 | 3 | 25 | 8 | 52 | 10 | 3 |
| 6 | 40 | 30 | 21 | 7 | 26 | 7 | 38 | 28 | 9 |
| 7 | 21 | 47 | 15 | 5 | 27 | 27 | 68 | 7 | 2 |
| 8 | 17 | 63 | 19 | 6 | 28 | 30 | 48 | 15 | 5 |
| 9 | 31 | 62 | 23 | 8 | 29 | 43 | 67 | 14 | 5 |
| 10 | 52 | 33 | 11 | 4 | 30 | 58 | 48 | 6 | 2 |
| 11 | 51 | 21 | 5 | 2 | 31 | 58 | 27 | 19 | 6 |
| 12 | 42 | 41 | 19 | 6 | 32 | 37 | 69 | 11 | 4 |
| 13 | 31 | 32 | 29 | 10 | 33 | 38 | 46 | 12 | 4 |
| 14 | 5 | 25 | 23 | 8 | 34 | 46 | 10 | 23 | 8 |
| 15 | 12 | 42 | 21 | 7 | 35 | 61 | 33 | 26 | 9 |
| 16 | 36 | 16 | 10 | 3 | 36 | 62 | 63 | 17 | 6 |
| 17 | 52 | 41 | 15 | 5 | 37 | 63 | 69 | 6 | 2 |
| 18 | 27 | 23 | 3 | 1 | 38 | 32 | 22 | 9 | 3 |
| 19 | 17 | 33 | 41 | 14 | 39 | 45 | 35 | 15 | 5 |
| 20 | 13 | 13 | 9 | 3 | 40 | 59 | 15 | 14 | 5 |
| No. | Number of Non-Dominated Solutions | Running Time (s) |
|---|---|---|
| 1 | 1 | 25.173 |
| 2 | 4 | 28.4 |
| 3 | 3 | 22.373 |
| 4 | 6 | 22.994 |
| 5 | 1 | 19.64 |
| 6 | 2 | 20.161 |
| 7 | 2 | 22.601 |
| 8 | 1 | 21.28 |
| 9 | 1 | 20.537 |
| 10 | 1 | 21.146 |
| 11 | 3 | 15.821 |
| 12 | 1 | 21.165 |
| 13 | 1 | 19.959 |
| 14 | 2 | 21.205 |
| 15 | 3 | 19.749 |
| 16 | 2 | 21.107 |
| 17 | 4 | 17.026 |
| 18 | 3 | 17.582 |
| 19 | 5 | 18.815 |
| 20 | 4 | 24.985 |
| No. | fitness1 | fitness2 | Denoted by |
|---|---|---|---|
| 1 | 2797 | 2540 | Utopia optimum |
| 2 | 2723 | 3380 | |
| 3 | 2999 | 2420 | |
| 4 | 2895 | 2500 | |
| 5 | 2759 | 3000 | |
| 6 | 2737 | 3180 |
| No. | Total Load Capacity (cwt) | Wait Time (Minute) | Operation Time (Minute) | Exceeding (Minute) |
|---|---|---|---|---|
| 1 | 139 | 577 | 163 | 43 |
| 2 | 115 | 493 | 139 | 19 |
| 3 | 108 | 593 | 150 | 30 |
| 4 | 108 | 689 | 155 | 35 |
| 5 | 68 | 308 | 101 | 0 |
| 6 | 80 | 137 | 94 | 0 |
| Total | 618 | 2797 | 802 | 127 |
| DGWO-2OPT | DGWO | ||||
|---|---|---|---|---|---|
| No. | Number of Non-Dominated Solutions | Running Time (s) | NO. | Number of Non-Dominated Solutions | Running Time (s) |
| 1 | 1 | 19.894 | 1 | 2 | 6.976 |
| 2 | 2 | 18.901 | 2 | 1 | 6.786 |
| 3 | 1 | 16.462 | 3 | 1 | 6.924 |
| 4 | 1 | 17.145 | 4 | 1 | 6.842 |
| 5 | 2 | 15.91 | 5 | 1 | 6.802 |
| 6 | 1 | 18.951 | 6 | 1 | 6.886 |
| 7 | 1 | 17.82 | 7 | 1 | 6.796 |
| 8 | 1 | 17.233 | 8 | 2 | 6.712 |
| 9 | 1 | 17.686 | 9 | 1 | 6.618 |
| 10 | 2 | 17.652 | 10 | 1 | 6.779 |
| 11 | 1 | 16.988 | 11 | 1 | 6.944 |
| 12 | 2 | 16.738 | 12 | 1 | 6.791 |
| 13 | 2 | 18.718 | 13 | 1 | 6.764 |
| 14 | 4 | 15.536 | 14 | 1 | 6.726 |
| 15 | 2 | 18.601 | 15 | 1 | 6.764 |
| 16 | 1 | 16.987 | 16 | 1 | 6.754 |
| 17 | 1 | 16.871 | 17 | 3 | 6.795 |
| 18 | 2 | 17.574 | 18 | 1 | 6.66 |
| 19 | 2 | 16.327 | 19 | 1 | 6.709 |
| 20 | 2 | 17.34 | 20 | 1 | 6.898 |
| Algorithm | Average Number of Non-Dominated Solutions | Average Running Time (s) | Average Value of Fitnesses |
|---|---|---|---|
| DGWO | 1.2 | 6.796 | 6089.5 |
| DGWO-2OPT | 1.6 | 17.467 | 2845.5 |
| DGWO-F2OPT | 2.2 | 21.086 | 2668.5 |
| Model | CVRP-OT | MO-CCVRP-OT | Deviation (%) |
|---|---|---|---|
| Wait time of vehicles at all disaster-affected points (m) | 819.78 | 811.13 | −1.06 |
| Cost incurred by the excess operation time of rescue vehicles (Subsidy unit) | 534.4 | 535.2 | 0.15 |
| Total travel time (m) | 266.72 | 266.76 | 0.01 |
| Number of vehicles dispatched | 2 | 2 | 0 |
| Euclidean distance from the Utopia point | 46.16 | 37.52 | −18.72 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, G.; Qi, Y.; Cai, Y.; Luo, Y.; Huang, H. A Grey Wolf Optimizer Algorithm for Multi-Objective Cumulative Capacitated Vehicle Routing Problem Considering Operation Time. Biomimetics 2024, 9, 331. https://doi.org/10.3390/biomimetics9060331
Huang G, Qi Y, Cai Y, Luo Y, Huang H. A Grey Wolf Optimizer Algorithm for Multi-Objective Cumulative Capacitated Vehicle Routing Problem Considering Operation Time. Biomimetics. 2024; 9(6):331. https://doi.org/10.3390/biomimetics9060331
Chicago/Turabian StyleHuang, Gewen, Yuanhang Qi, Yanguang Cai, Yuhui Luo, and Helie Huang. 2024. "A Grey Wolf Optimizer Algorithm for Multi-Objective Cumulative Capacitated Vehicle Routing Problem Considering Operation Time" Biomimetics 9, no. 6: 331. https://doi.org/10.3390/biomimetics9060331
APA StyleHuang, G., Qi, Y., Cai, Y., Luo, Y., & Huang, H. (2024). A Grey Wolf Optimizer Algorithm for Multi-Objective Cumulative Capacitated Vehicle Routing Problem Considering Operation Time. Biomimetics, 9(6), 331. https://doi.org/10.3390/biomimetics9060331