
Research on Deployable Wings for MAVs Bioinspired by the Hind Wings of the Beetle Protaetia brevitarsis




Abstract
1. Introduction
2. Materials and Methods
2.1. Beetle
2.2. Geometric Model
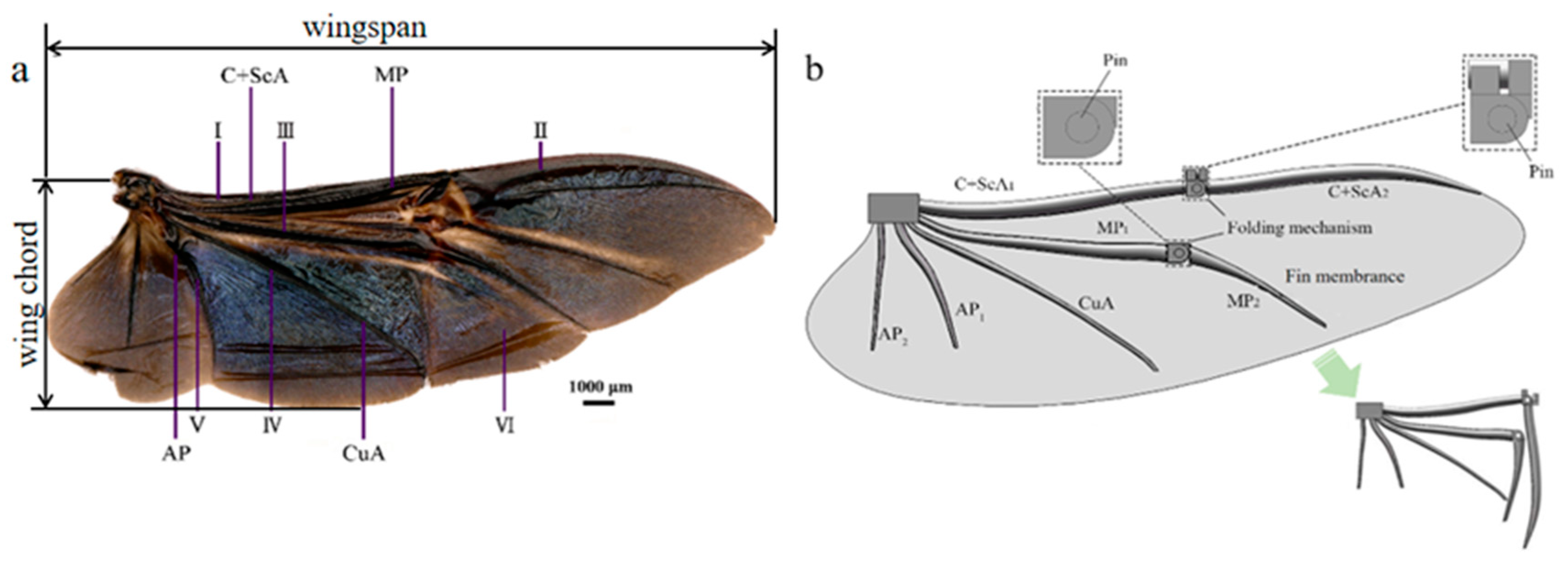
2.2.1. Vein Structure
2.2.2. Hind Wing Folding Method
2.3. Analysis of Mechanical Properties of BD-W
2.3.1. Static Analysis
2.3.2. Aerodynamic Characteristic Analysis
- (1)
- Bionic deployable wing aerodynamic model
- (2)
- Parameterization of fluid mechanics simulation
- Inlet boundary: The velocity inlet boundary is selected, and the velocity value size is set according to the test.
- Outlet boundary: The pressure outlet boundary is selected, and the outlet pressure value is set to standard atmospheric pressure.
- (3)
- Aerodynamic characterization of bionic deployable wing
2.4. Fabrication of BD-W and Wind Tunnel Test
3. Results and Discussion
3.1. Statics Mechanism Analysis of the Designed BD-W
3.2. Aerodynamic Characteristics of BD-W
3.2.1. The Influence of Incoming Flow Velocity
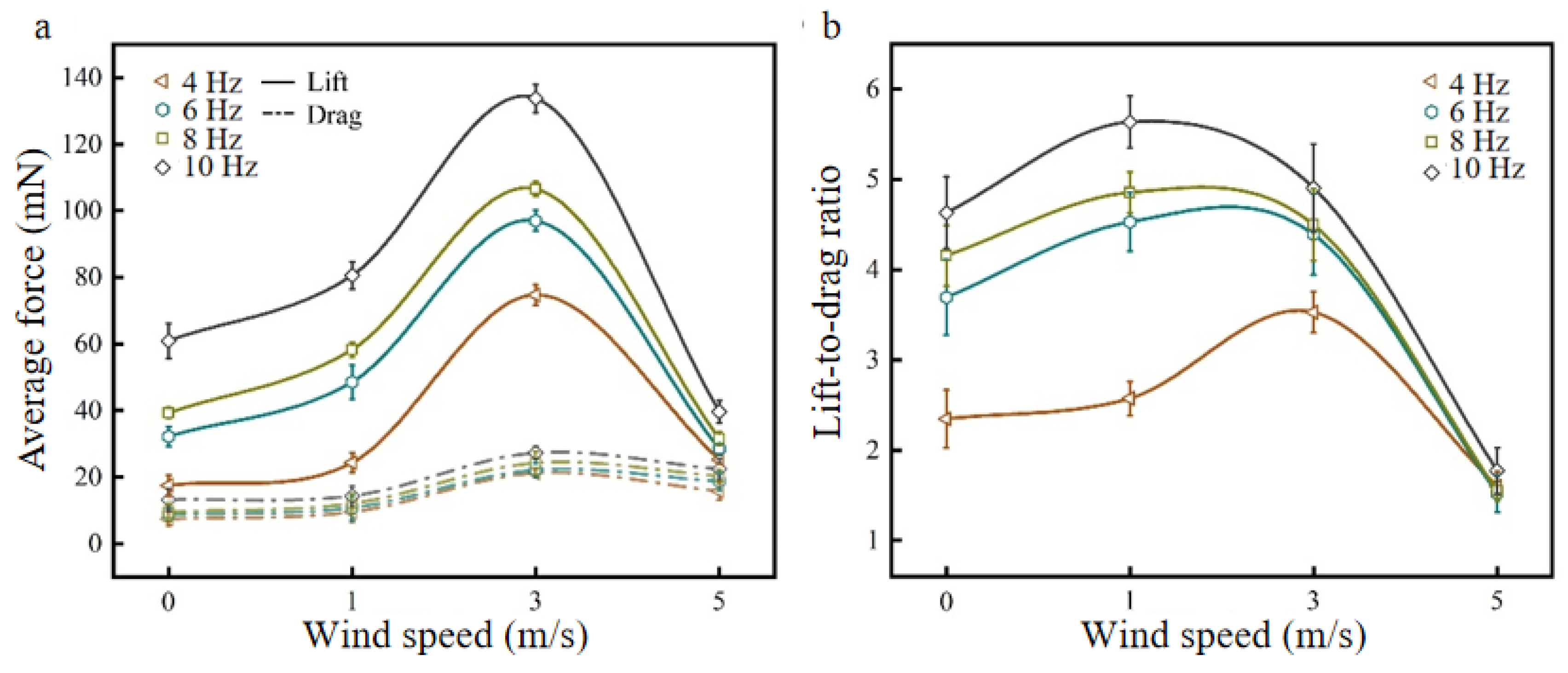
3.2.2. The Effect of Flapping Frequency
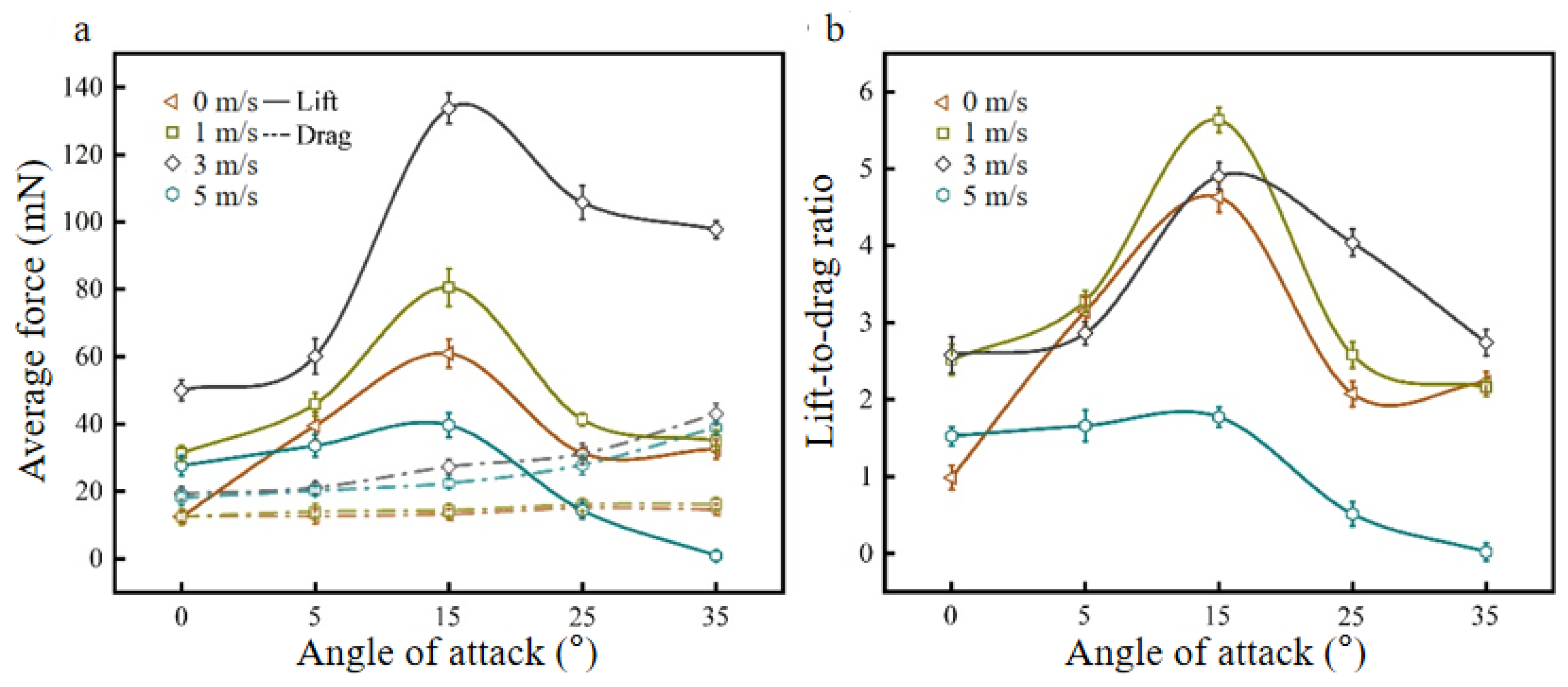
3.2.3. The Effect of the Angle of Attack
3.2.4. Lift-to-Drag Ratio at Different Parameter Values
3.2.5. Simulation Results of BD-W under Optimal Parameters
3.3. Biomimetic Deployable Wing Wind Tunnel Test
3.3.1. Influence of Incoming Flow Velocity on Aerodynamic Characteristics of BD-W
3.3.2. Influence of the Flapping Frequency on the Aerodynamic Characteristics of BD-W
3.3.3. Influence of the Angle of Attack on the Aerodynamic Characteristics of BD-W
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Geisler, T. Observations and measurements of wing parameters of the selected beetle species and the design of a mechanism structure implementing a complex wing movement. Int. J. Appl. Mech. Eng. 2016, 21, 837–847. [Google Scholar] [CrossRef]
- Xiao, S.J.; Hu, K.; Huang, B.X.; Deng, H.C.; Ding, X.L. A review of research on the mechanical design of hoverable flapping wing micro-air vehicles. J. Bionic Eng. 2021, 18, 1235–1254. [Google Scholar] [CrossRef]
- Faber, J.A.; Arrieta, A.F.; Studart, A.R. Bioinspired spring origami. Science 2018, 359, 1386–1391. [Google Scholar] [CrossRef] [PubMed]
- Deiters, J.; Kowalczyk, W.; Seidl, T. Simultaneous optimisation of earwig hindwings for flight and folding. Biol. Open 2016, 5, 638–644. [Google Scholar] [CrossRef]
- Saito, K.; Yamamoto, S.; Maruyama, M.; Okabe, Y. Asymmetric hindwing foldings in rove beetles. Proc. Natl. Acad. Sci. USA 2014, 111, 16349–16352. [Google Scholar] [CrossRef]
- Haas, F.; Wootton, R.J. Two basic mechanisms in insect wing folding. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1996, 263, 1651–1658. [Google Scholar]
- Phan, H.V.; Park, H.C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science 2021, 370, 1214–1218. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, N.; Qu, F.Y. Bio-Inspired flapping wing robots with foldable or deformable wings: A review. Bioinspir. Biomim. 2022, 18, 011002. [Google Scholar] [CrossRef] [PubMed]
- Ha, N.S.; Nguyen, Q.V.; Goo, N.S.; Park, H.C. Static and dynamic characteristics of an artificial wing mimicking an Allomyrina Dichotoma beetle’s hind wing for flapping-wing micro air vehicles. Exp. Mech. 2022, 52, 1535–1549. [Google Scholar] [CrossRef]
- Truong, Q.T.; Argyoganendro, B.W.; Park, H.C. Design and demonstration of insect mimicking foldable artificial wing using four-bar linkage systems. J. Bionic Eng. 2014, 11, 449–458. [Google Scholar] [CrossRef]
- Li, X.; Guo, C.; Ma, Y.; Zheng, Y. Design of bionic foldable wing mimicking the hind wings of the C. buqueti bamboo weevil. J. Mech. Des. 2021, 143, 083303. [Google Scholar] [CrossRef]
- Dufour, L.; Owen, K.; Mintchev, S.; Floreano, D. A drone with insect-inspired folding wings. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016; IEEE Press: NewYork, NY, USA, 2016; pp. 1576–1581. [Google Scholar]
- Sun, J.Y.; Liu, C.; Li, F.D.; Bhushan, B.; Wu, W.; Tong, J. Effect of vein microstructure and nanomechanical behaviors on wind-resistant performance of Asian ladybeetle hindwing. Tribol. Int. 2020, 142, 105717. [Google Scholar] [CrossRef]
- Liu, C.; Li, P.P.; Song, F.; Stamhuis, E.J.; Sun, J.Y. Design optimization and wind tunnel investigation of a flapping system based on the flapping wing trajectories of a beetle’s hindwings. Comput. Biol. Med. 2022, 140, 105085. [Google Scholar] [CrossRef]
- Abramowicz, M.; Kamieniecki, K.; Piechna, A.; Rubach, P.; Piechna, J. Using ANSYS and SORCER modeling framework for the optimization of the design of a flap wing bionic object. Mach. Dyn. Res. 2016, 39, 21–36. [Google Scholar]
- Deng, S.H.; Wang, J.; Liu, H.R. Experimental study of a bio-inspired flapping wing MAV by means of force and PIV measurements. Aerosp. Sci. Technol. 2019, 94, 105382. [Google Scholar] [CrossRef]
- Deng, S.H.; Percin, M.; van Oudheusden, B.; Remes, B.; Bijl, H. Experimental investigation on the aerodynamics of a bio-inspired flexible flapping wing micro air vehicle. Int. J. Micro Air Veh. 2014, 6, 105–115. [Google Scholar] [CrossRef]
- Nian, P.; Song, B.F.; Xuan, J.L.; Zhou, W.H.; Xue, D. Study on flexible flapping wings with three dimensional asymmetric passive deformation in a flapping cycle. Aerosp. Sci. Technol. 2020, 104, 105944. [Google Scholar] [CrossRef]
- Srygley, R.B.; Thomas, A.L.R. Unconventional lift-generating mechanisms in free-flying butterflies. Nature 2002, 420, 660–664. [Google Scholar] [CrossRef] [PubMed]
- Urca, T.; Debnath, A.K.; Stefanini, J.; Gurka, R.; Ribak, G. The aerodynamics and power requirements of forward flapping flight in the mango stem borer beetle (Batocera rufomaculata). Integr. Org. Biol. 2020, 2, obaa026. [Google Scholar] [CrossRef]
- Bhat, S.S.; Zhao, J.S.; Sheridan, J.; Hourigan, K.; Thompson, M.C. The leading-edge vortex on a rotating wing changes markedly beyond a certain central body size. R. Soc. Open Sci. 2018, 5, 172197. [Google Scholar] [CrossRef]
- McCullough, E.L.; Tobalske, B.W. Elaborate horns in a giant rhinoceros beetle incur negligible aerodynamic costs. Proc. R. Soc. B 2013, 280, 20130197. [Google Scholar] [CrossRef] [PubMed]
- Nian, P.; Song, B.F.; Xuan, J.L.; Yang, W.Q.; Dong, Y.B. A wind tunnel experimental study on the flexible flapping wing with an attached airfoil to the root. IEEE Access 2019, 7, 47891–47903. [Google Scholar] [CrossRef]
- Chen, P.; Joshi, S.; Swartz, S.M.; Breuer, K.; Reich, G.W. Bat inspired flapping flight. In Proceedings of the 22nd AIAA/ASME/AHS Adaptive Structures Conference (Maryland: AIAA), National Harbor, MD, USA, 13–17 January 2014; p. 1120. [Google Scholar]
- Bahlman, J.W.; Swartz, S.M.; Breuer, K.S. Design and characterization of a multi-articulated robotic bat wing. Bioinspir. Biomim. 2013, 8, 016009. [Google Scholar] [CrossRef]
- O’Callaghan, F.; Sarig, A.; Ribak, G.; Lehamnn, F. Efficiency and aerodynamic performance of bristled insect wings depending on reynolds number in flapping flight. Fluids 2022, 7, 75. [Google Scholar] [CrossRef]
- Sun, J.Y. Miniaturization of robots that fly on beetles’ wings. Science 2021, 370, 1165. [Google Scholar] [CrossRef] [PubMed]
- Muhammad, A.; Nguyen, Q.V.; Park, H.C.; Hwang, D.Y.; Byun, D.; Goo, N.S. Improvement of artificial foldable wing models by mimicking the unfolding/folding mechanism of a beetle hind wing. J. Bionic Eng. 2010, 7, 134–141. [Google Scholar] [CrossRef]
- Sun, J.Y.; Li, P.P.; Yan, Y.W.; Fa, S.; Zhang, Z.J. Micro-structures, nanomechanical properties and flight performance of three beetles with different folding ratio. Beilstein J. Nanotechnol. 2022, 13, 845–856. [Google Scholar] [CrossRef]
- Truong, T.V.; Nguyen, Q.V.; Lee, H.P. Bio-Inspired flexible flapping wings with elastic deformation. Aerospace 2017, 4, 37. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Sun, X.C.; Wang, X. Numerical study of high performance on the influence of angle of attack on aerodynamic performance of wing flapping. Acta Aerodyn. Sin. 2022, 40, 50–60. [Google Scholar]
- Qing, Z.; Yanfei, D.; Heng, L. Computational investigation of overall aerodynamic characteristics for spanwise adaptive wing. J. Xi’an Jiaotong Univ. 2020, 54, 174–184. [Google Scholar]
- Wang, C.; Zhou, C.; Xie, P. Numerical investigation into the effects of stroke trajectory on the aerodynamic performance of insect hovering flight. J. Mech. Sci. Technol. 2016, 30, 1659–1669. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C+ScA1 | C+ScA2 | MP1 | MP2 | CuA | AP1 | AP2 | ||||||||
| C1 | C2 | C1 | C2 | C1 | C2 | C1 | C2 | C1 | C2 | C1 | C2 | C1 | C2 | |
| Dmaj, mm | 4.20 | 2.20 | 2.84 | 0.80 | 2.00 | 2.70 | 2.70 | 0.40 | 1.70 | 0.75 | 3.20 | 0.92 | 1.60 | 0.80 |
| Dmin, mm | 1.94 | 1.95 | 2.09 | 0.29 | 1.05 | 2.00 | 2.00 | 0.12 | 1.20 | 0.51 | 1.25 | 0.34 | 0.75 | 0.24 |
| Characteristic Parameter | Parameter Range |
|---|---|
| Flapping angle (°) | 90 |
| Wind speed (m/s) | 1, 3, 5 |
| Angle of attack (°) | 0, 5, 15, 25, 35 |
| Flapping frequency (Hz) | 4, 6, 8, 10 |
| Test Section Parameters | Value |
|---|---|
| Working section shape | Rectangle |
| Working section area (mm2) | 650 × 450 |
| Length of working section (mm) | 1000 |
| Turbulent intensity (%) | <0.3 |
| Regulator form of wind speed | Hot-wire sensor |
| Range of wind speed (m/s) | 0–10 |
| Airflow nonuniformity of working section (%) | <3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Wang, W.; Li, P.; Zhang, Z. Research on Deployable Wings for MAVs Bioinspired by the Hind Wings of the Beetle Protaetia brevitarsis. Biomimetics 2024, 9, 313. https://doi.org/10.3390/biomimetics9060313
Sun J, Wang W, Li P, Zhang Z. Research on Deployable Wings for MAVs Bioinspired by the Hind Wings of the Beetle Protaetia brevitarsis. Biomimetics. 2024; 9(6):313. https://doi.org/10.3390/biomimetics9060313
Chicago/Turabian StyleSun, Jiyu, Wenzhe Wang, Pengpeng Li, and Zhijun Zhang. 2024. "Research on Deployable Wings for MAVs Bioinspired by the Hind Wings of the Beetle Protaetia brevitarsis" Biomimetics 9, no. 6: 313. https://doi.org/10.3390/biomimetics9060313
APA StyleSun, J., Wang, W., Li, P., & Zhang, Z. (2024). Research on Deployable Wings for MAVs Bioinspired by the Hind Wings of the Beetle Protaetia brevitarsis. Biomimetics, 9(6), 313. https://doi.org/10.3390/biomimetics9060313