
Biomimetic Ultrasonic Vibrator with Broadband Characteristics Inspired by Leaf-Cutting Ants


Abstract
1. Introduction
2. Excitation Organs of Leaf Cutting Ant and the Biomimetic Ultrasonic Vibrator (BUV)
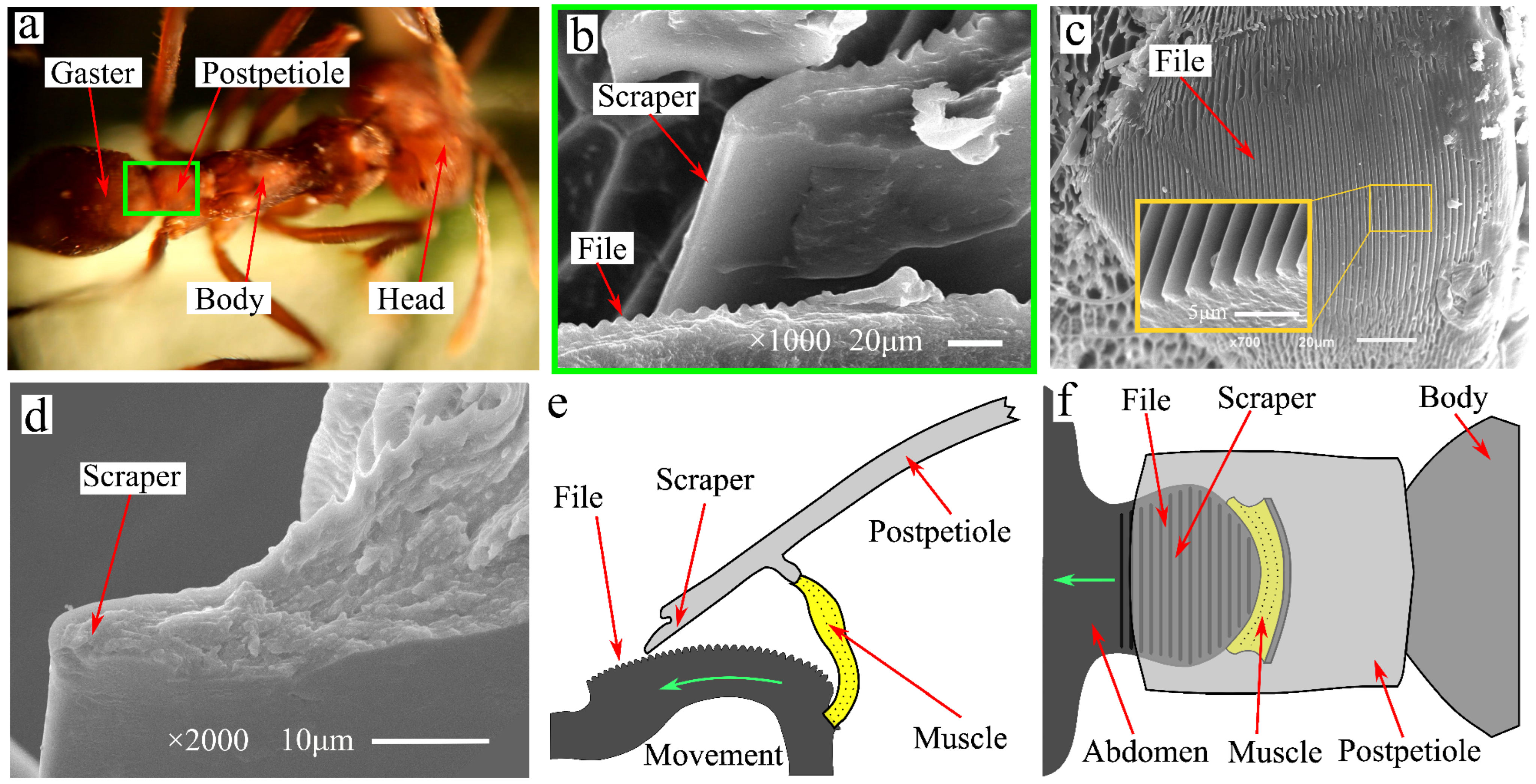
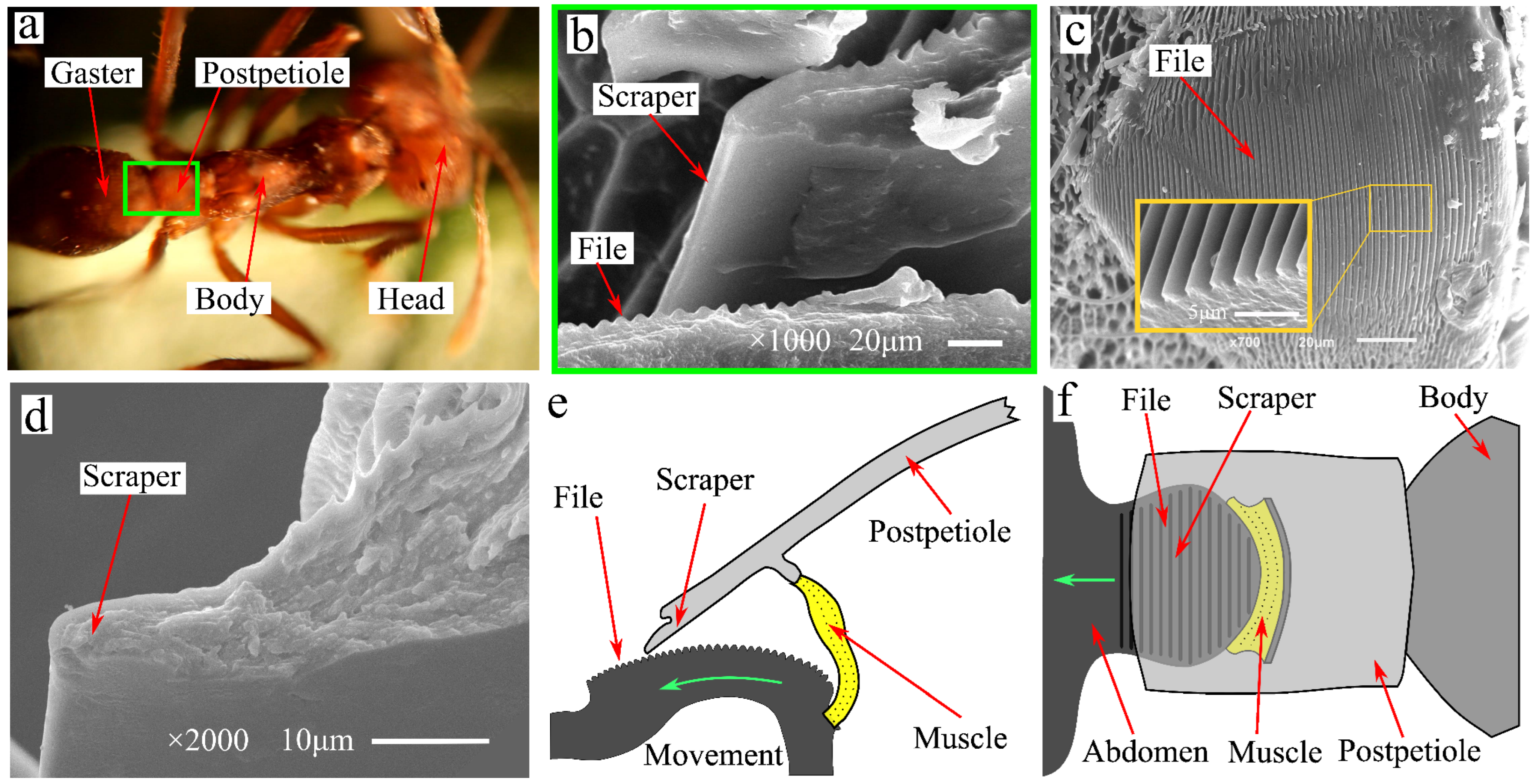
2.1. Excitation Organs of Leaf Cutting Ant
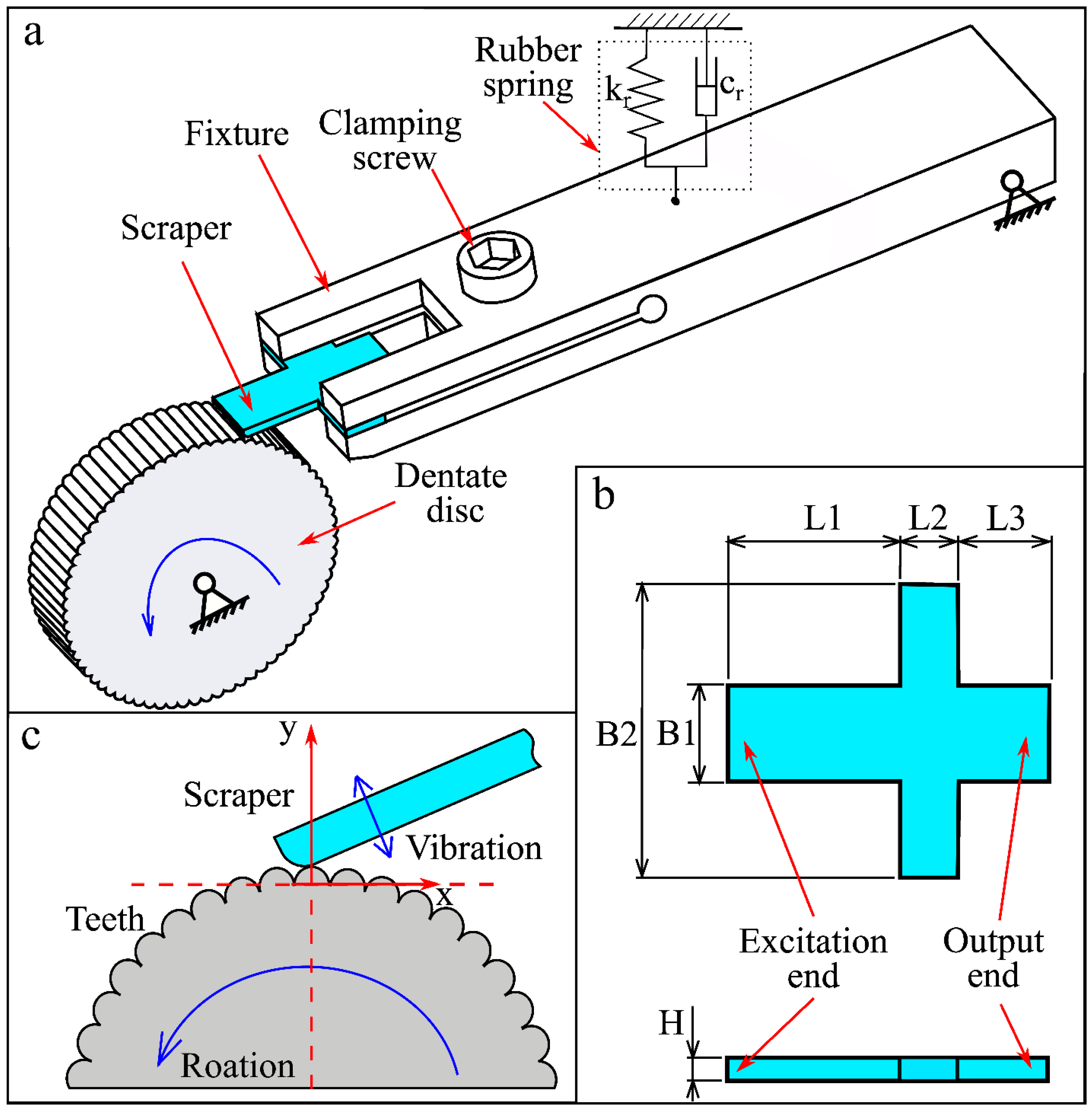
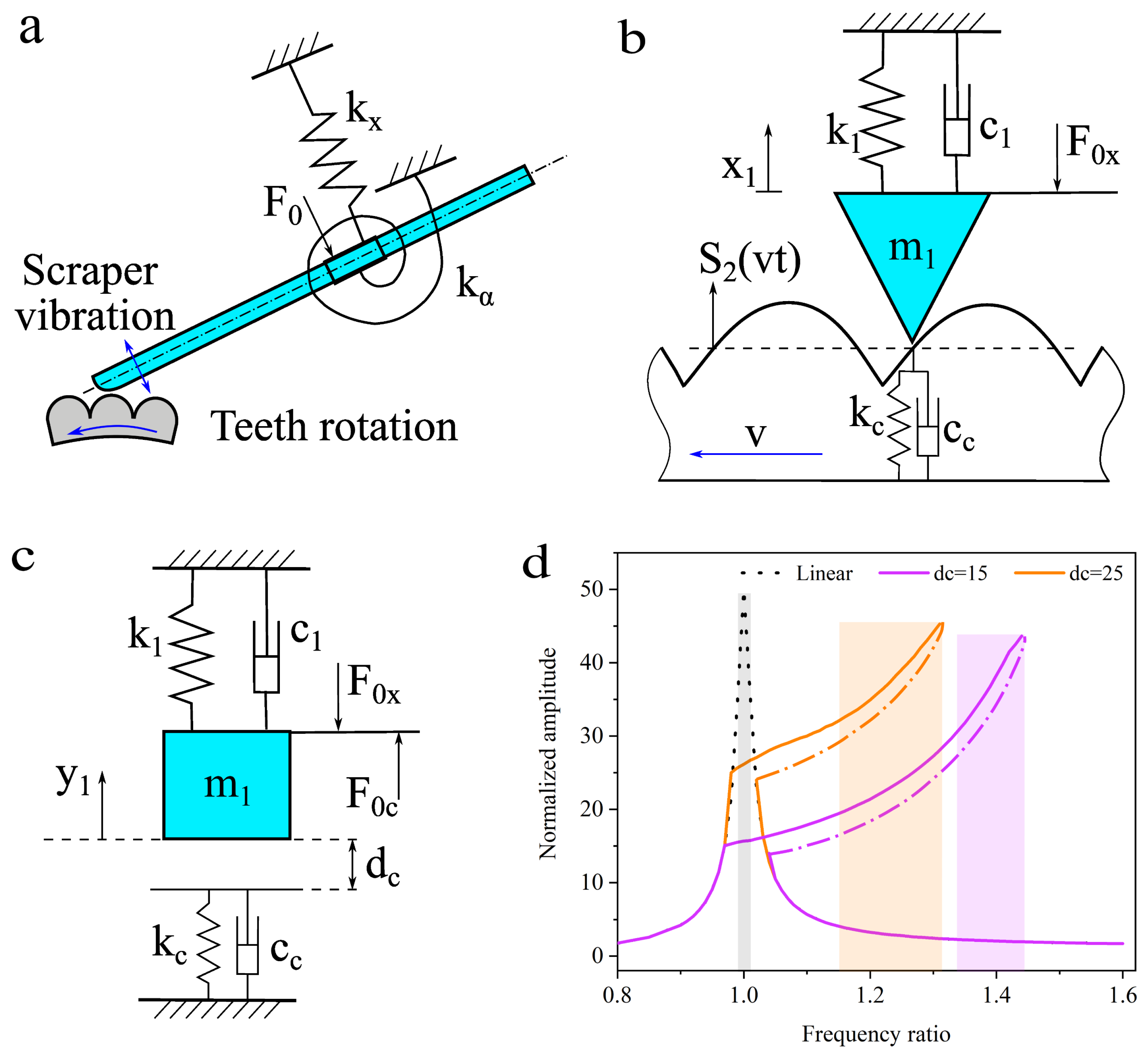
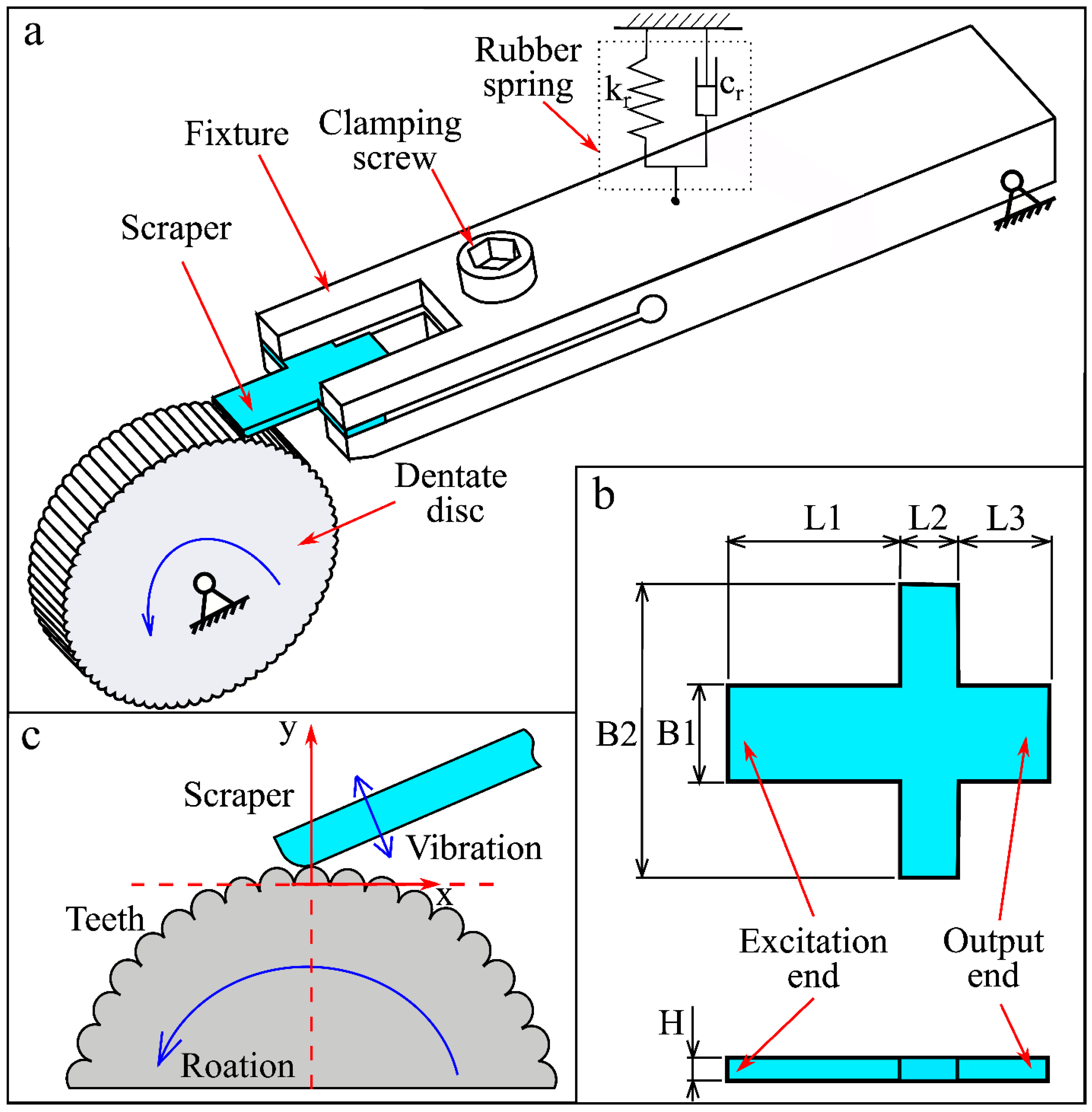
2.2. Design of Biomimetic Vibrator
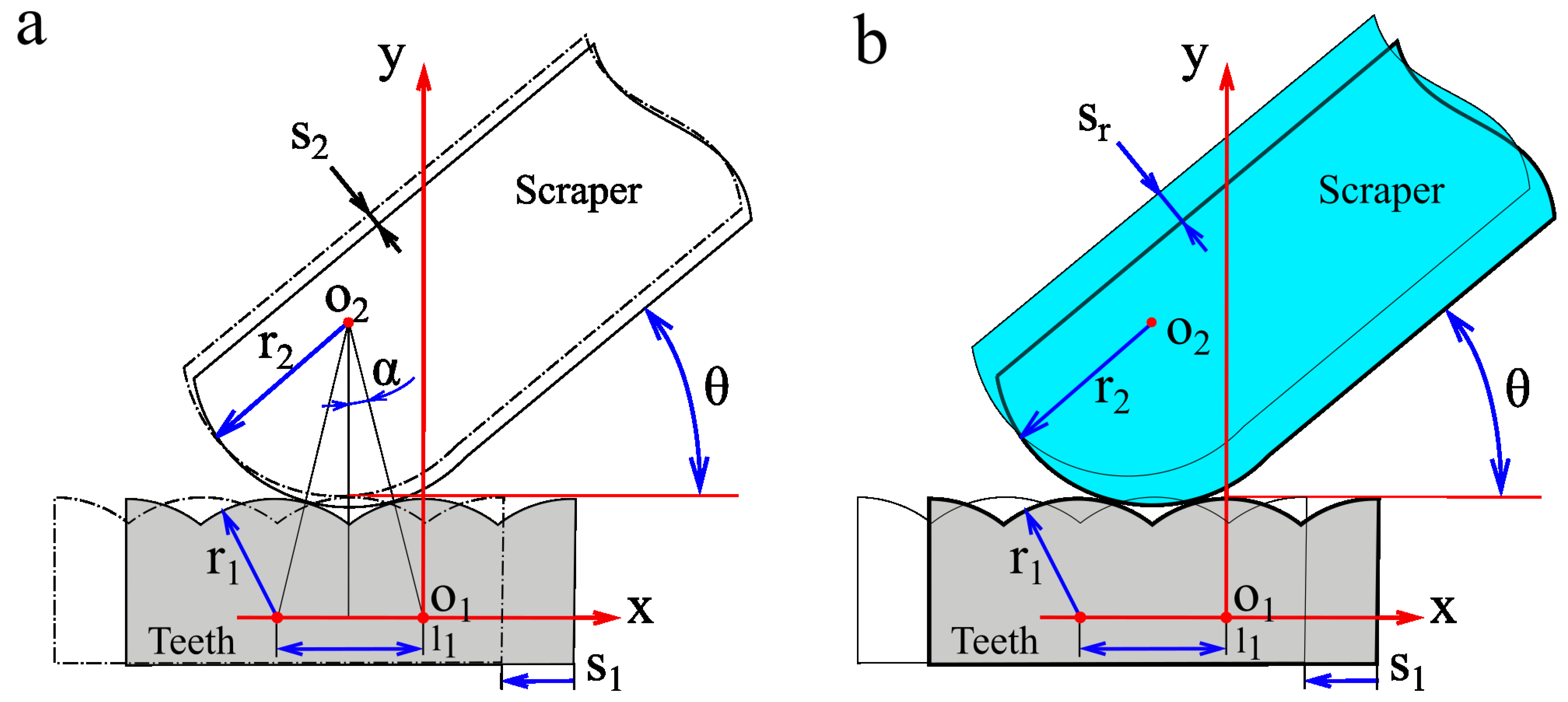
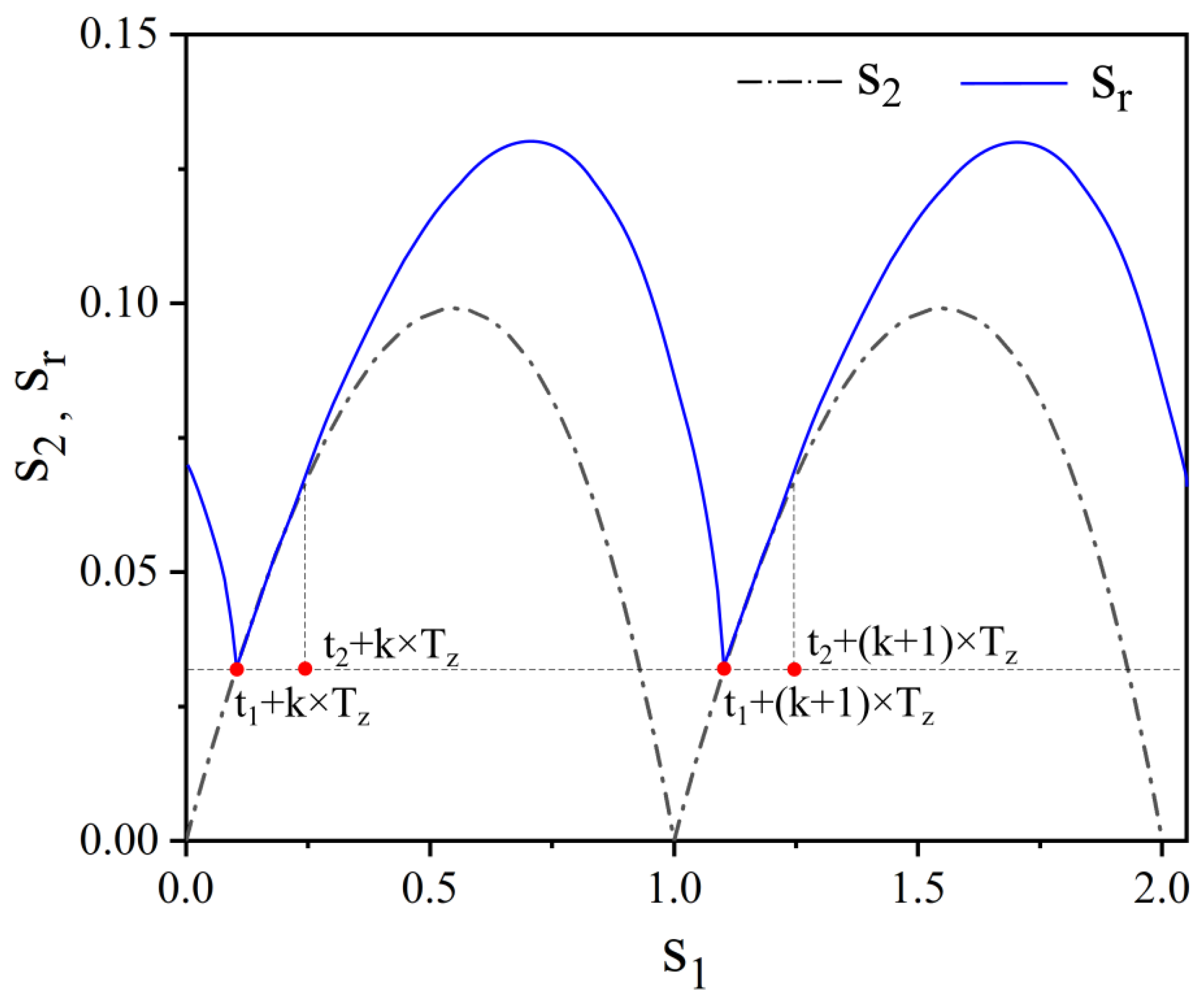
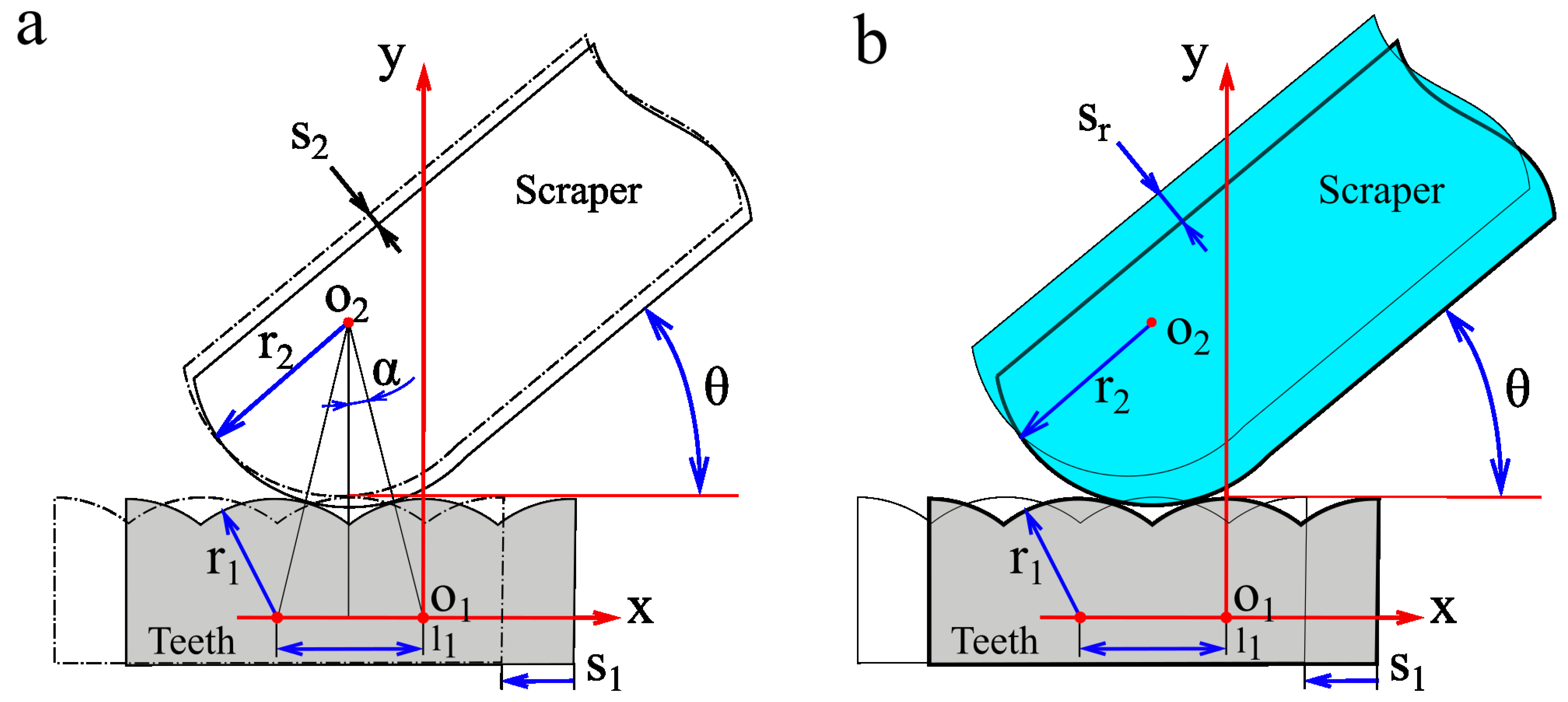
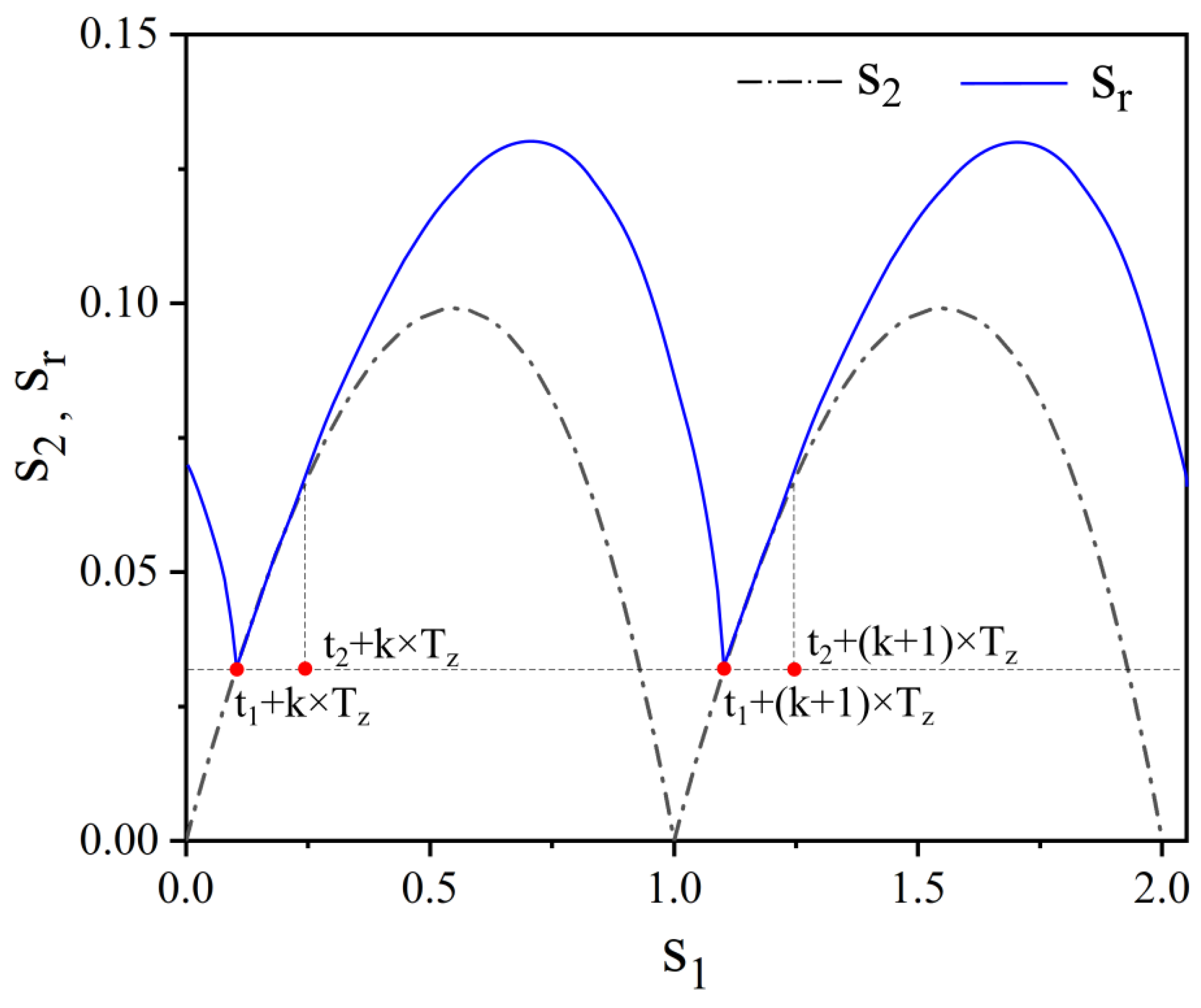
2.3. Contact and Engage Relationship between Scraper and Dentate Disc
2.4. Vibration Model of the Biomimetic Vibrator
3. Experimental Methods and Simulation Model
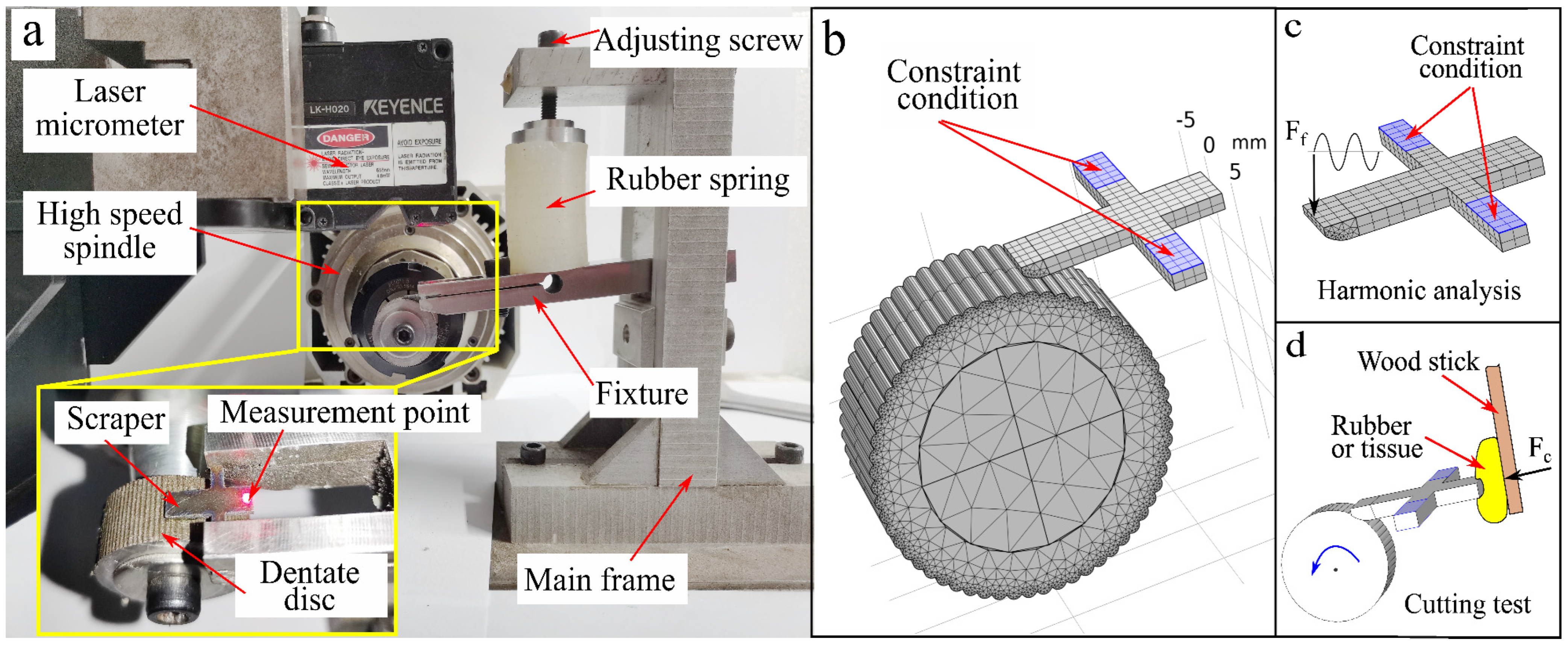
3.1. Experimental Platform
3.2. Experiment for Load-Carrying Capacity
3.3. Simulation Model
4. Results and Discussion
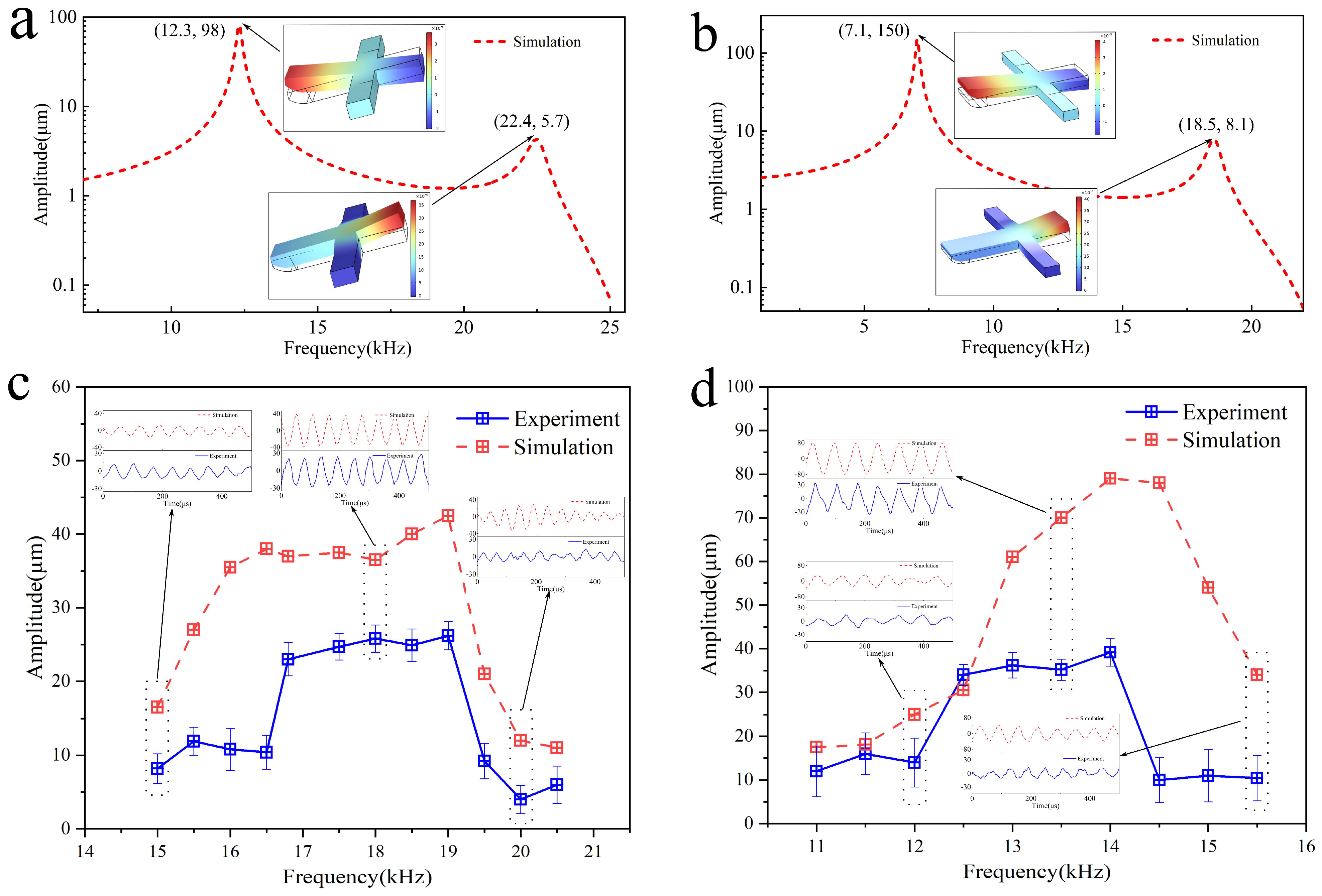
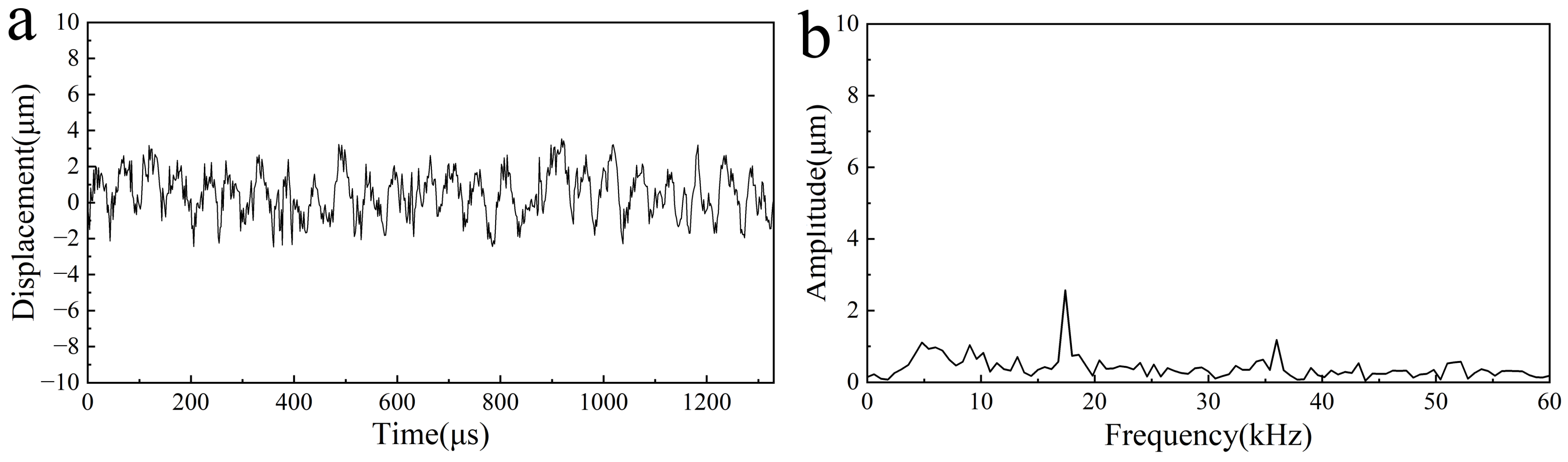
4.1. The Operational Frequency Band of the Biomimetic Vibrator
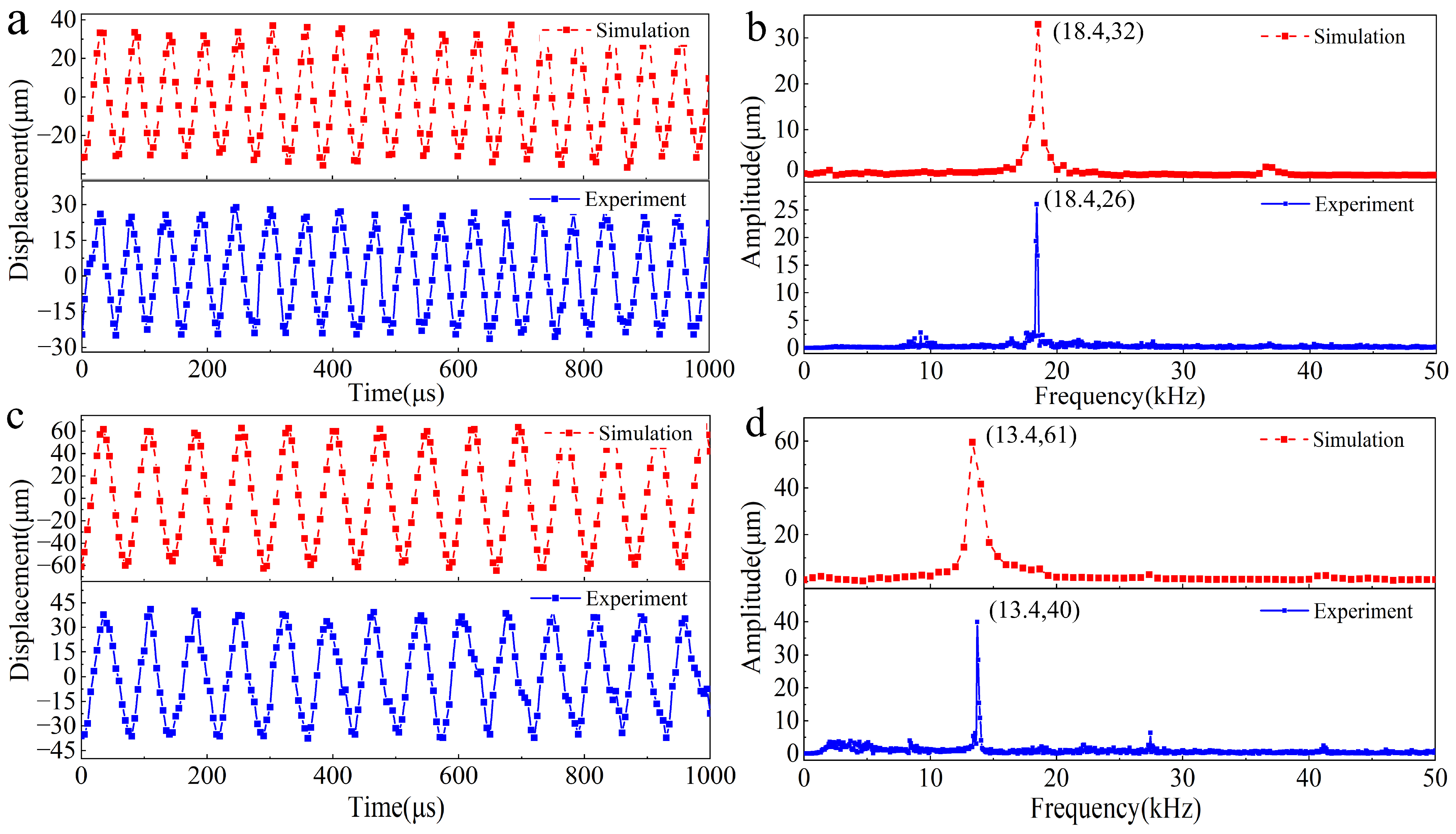
4.2. Vibration of the Output End
4.3. Vibration of the Fixture
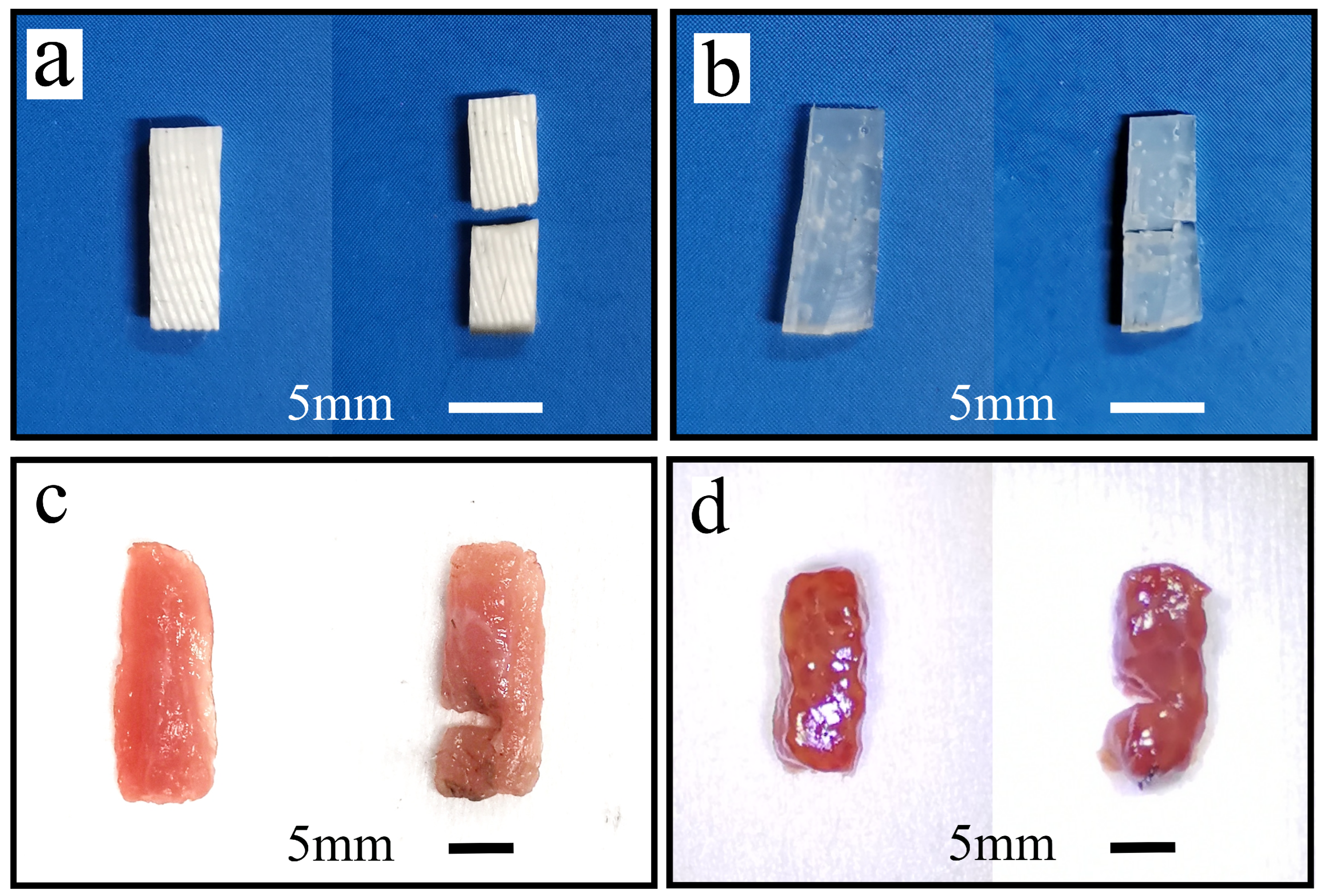
4.4. Load-Carrying Capacity Test
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yao, Y.; Pan, Y.; Liu, S. Power ultrasound and its applications: A state-of-the-art review. Ultrason. Sonochem. 2019, 62, 104722. [Google Scholar] [CrossRef] [PubMed]
- Harvey, G.; Gachagan, A.; Mutasa, T. Review of high-power ultrasound-industrial applications and measurement methods. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 481–495. [Google Scholar] [CrossRef] [PubMed]
- Jiao, L.; Tong, Y.; Cui, Y.; Chen, J.; Bai, Q. Research on ultrasonic cleaning technology of optical components. In Proceedings of the 7th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Advanced Optical Manufacturing Technologies, Harbin, China, 26–29 April 2014; Volume 9281, pp. 239–245. [Google Scholar] [CrossRef]
- Asami, T.; Miura, H. Study of ultrasonic machining by longitudinal-torsional vibration for processing brittle materials-observation of machining marks. Phys. Procedia 2015, 70, 118–121. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, J.; Yu, D.; Feng, P.; Wu, Z.; Cai, W. Advances in rotary ultrasonic machining system for hard and brittle materials. Adv. Mech. Eng. 2019, 11, 1–13. [Google Scholar] [CrossRef]
- Ahmed, Y.; Cong, W.L.; Stanco, M.R.; Xu, Z.G.; Pei, Z.J.; Treadwell, C.; Zhu, Y.L.; Li, Z.C. Rotary ultrasonic machining of alumina dental ceramics: A preliminary experimental study on surface and subsurface damages. J. Manuf. Sci. Eng. 2012, 134, 064501. [Google Scholar] [CrossRef]
- Peng, Z.; Zhang, X.; Liu, L.; Xu, G.; Wang, G.; Zhao, M. Effect of high-speed ultrasonic vibration cutting on the microstructure, surface integrity, and wear behavior of titanium alloy. J. Mater. Res. Technol. 2023, 24, 3870–3888. [Google Scholar] [CrossRef]
- Peng, Z.; Zhang, X.; Zhang, Y.; Liu, L.; Xu, G.; Wang, G.; Zhao, M. Wear resistance enhancement of Inconel 718 via high-speed ultrasonic vibration cutting and associated surface integrity evaluation under high-pressure coolant supply. Wear 2023, 530–531, 205027. [Google Scholar] [CrossRef]
- Sun, Z.; Geng, D.; Guo, H.; Zhang, Q.; Liu, Y.; Liu, L.; Jiang, X.; Zhang, D. Introducing transversal vibration in twist drilling: Material removal mechanisms and surface integrity. J. Mater. Process. Tech. 2024, 325, 118296. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, Z.; Li, Z.; Sui, H.; Zhang, D. Influences of machining parameters on tool performance when high-speed ultrasonic vibration cutting titanium alloys. J. Manuf. Process. 2020, 60, 188–199. [Google Scholar] [CrossRef]
- Jundt, J.S.; Marchena, J.M.; Hanna, I.; Dhanda, J.; Breit, M.J.; Perry, A.P. Evolving technologies for tissue cutting. Oral Maxillofac. Surg. Clin. N. Am. 2019, 31, 549–559. [Google Scholar] [CrossRef]
- Li, J.; Dong, X.; Zhang, G.; Guo, Z.; Zhang, G.; Shi, C. An enhanced hemostatic ultrasonic scalpel based on the longitudinal-torsional vibration mode. IEEE Access 2021, 9, 10951–10961. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Li, J.; Yang, Y.; Wang, S. Piezoelectric transducer design for an ultrasonic scalpel with enhanced dexterity for minimally invasive surgical robots. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 234, 1271–1285. [Google Scholar] [CrossRef]
- Dai, J.C.; Bailey, M.R.; Sorensen, M.D.; Harper, J.D. Innovations in Ultrasound Technology in the Management of Kidney Stones. Urol. Clin. N. Am. 2019, 46, 273–285. [Google Scholar] [CrossRef] [PubMed]
- Seoane, L.M.; Salvador, J.O.; Alba, A.B.; Fentes, D.P. Technological innovations in shock wave lithotripsy. Actas Urol. Esp. (Engl. Ed.) 2024, 48, 105–110. [Google Scholar] [CrossRef]
- Zhang, K.; Gao, G.; Zhao, C.; Wang, Y.; Wang, Y.; Li, J. Review of the design of power ultrasonic generator for piezoelectric transducer. Ultrason. Sonochem. 2023, 96, 106438. [Google Scholar] [CrossRef]
- Kazys, R.; Vaskeliene, V. High temperature ultrasonic transducers: A review. Sensors 2021, 21, 3200. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Huang, W.; Wang, B. Design and output characteristics of ultrasonic transducer based on rare-earth giant magnetostrictive material. IEEE Trans. Magn. 2021, 58, 1–6. [Google Scholar] [CrossRef]
- Friedrich, F.; Lockhart, R.; Briand, D.; Isarakorn, D.; Margairaz, P.; Sandoz, J.-P.; Brossard, J.; Keppner, H.; Olson, W.; Dietz, T.; et al. Silicon micromachined ultrasonic transducer with improved power transfer for cutting applications. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1169–1172. [Google Scholar] [CrossRef]
- Hofmann, M.; Haeberlin, A.; de Brot, S.; Stahel, A.; Keppner, H.; Burger, J. Development and evaluation of a titanium-based planar ultrasonic scalpel for precision surgery. Ultrasonics 2023, 130, 106927. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Yin, H.; Peng, J.; Wang, L. Comparison of the Vibration Response of a Rotary Dobby with Cam-Link and Cam-Slider Modulators. Autex Res. J. 2020, 21, 491–500. [Google Scholar] [CrossRef]
- Ishikawa, K.-I.; Suwabe, H.; Nishide, T.; Uneda, M. A study on combined vibration drilling by ultrasonic and low-frequency vibrations for hard and brittle materials. Precis. Eng. 1998, 22, 196–205. [Google Scholar] [CrossRef]
- McKusick, V.A.; Kenneth, W.H. Félix Savart (1791–1841), physician-physicist: Early studies pertinent to the understanding of murmurs. J. Hist. Med. Allied Sci. 1959, XIV, 411–423. [Google Scholar] [CrossRef]
- Masters, W.M.; Fletcher, N.H.; Markl, H.; Tautz, J. Body vibration and sound production in an insect (Atta sexdens) without specialized radiating structures. J. Comp. Physiol. A 1983, 150, 239–249. [Google Scholar] [CrossRef]
- Tautz, J.; Roces, F.; Hölldobler, B. Use of a sound-based vibratome by leaf-cutting ants. Science 1995, 267, 84–87. [Google Scholar] [CrossRef] [PubMed]
- Markl, H. Die verständigung durch stridulationssignale bei blattschneiderameisen, ii: Erzeugung und eigenschaften der signale. Z. Vgl. Physiol. 1968, 69, 6–37. [Google Scholar] [CrossRef]
- Yao, G.; Feng, L.; Zhang, D.; Jiang, X. Morphology and mechanical properties of vibratory organs in the leaf-cutting ant (atta cephalotes). J. Bionic Eng. 2018, 15, 722–730. [Google Scholar] [CrossRef]
- Schofield, R.M.S.; Emmett, K.D.; Niedbala, J.C.; Nesson, M.H. Leaf-cutter ants with worn mandibles cut half as fast, spend twice the energy, and tend to carry instead of cut. Behav. Ecol. Sociobiol. 2010, 65, 969–982. [Google Scholar] [CrossRef]
- Natsiavas, S. On the dynamics of oscillators with bi-linear damping and stiffness. Int. J. Non-linear Mech. 1990, 25, 535–554. [Google Scholar] [CrossRef]
- Shaw, S.; Holmes, P. A periodically forced piecewise linear oscillator. J. Sound Vib. 1983, 90, 129–155. [Google Scholar] [CrossRef]
- Wong, C.W.; Zhang, W.S.; Lau, S.L. Periodic forced vibration of unsymmetrical piecewise-linear systems by incremental harmonic balance method. J. Sound Vib. 1991, 149, 91–105. [Google Scholar] [CrossRef]
- A29/A29M-23; Standard Specification for General Requirements for Steel Bars, Carbon and Alloy, Hot-Wrought. ASTM International: West Conshohocken, PA, USA, 2023.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| m1 | 1 |
| k1 | 1 |
| kc | 8 × k1 |
| c1 | 0.01 × 2 × (k1 × m1)0.5 |
| cc | 0.01 × 2 × (kc × m1)0.5 |
| Number | L1 | L2 | L3 | B1 | B2 | H |
|---|---|---|---|---|---|---|
| S-1 | 4.5 | 1.6 | 2.8 | 8.0 | 20.0 | 1.0 |
| S-2 | 7 | 1.6 | 3.6 | 8.0 | 20.0 | 1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Yao, G.; Zhang, M.; Jiang, X.; Zhang, D. Biomimetic Ultrasonic Vibrator with Broadband Characteristics Inspired by Leaf-Cutting Ants. Biomimetics 2024, 9, 247. https://doi.org/10.3390/biomimetics9040247
Wu W, Yao G, Zhang M, Jiang X, Zhang D. Biomimetic Ultrasonic Vibrator with Broadband Characteristics Inspired by Leaf-Cutting Ants. Biomimetics. 2024; 9(4):247. https://doi.org/10.3390/biomimetics9040247
Chicago/Turabian StyleWu, Wenshuai, Guang Yao, Mingshuo Zhang, Xinggang Jiang, and Deyuan Zhang. 2024. "Biomimetic Ultrasonic Vibrator with Broadband Characteristics Inspired by Leaf-Cutting Ants" Biomimetics 9, no. 4: 247. https://doi.org/10.3390/biomimetics9040247
APA StyleWu, W., Yao, G., Zhang, M., Jiang, X., & Zhang, D. (2024). Biomimetic Ultrasonic Vibrator with Broadband Characteristics Inspired by Leaf-Cutting Ants. Biomimetics, 9(4), 247. https://doi.org/10.3390/biomimetics9040247