
Experimental Investigation on Aerodynamic Performance of Inclined Hovering with Asymmetric Wing Rotation



Abstract
1. Introduction
2. Methodology
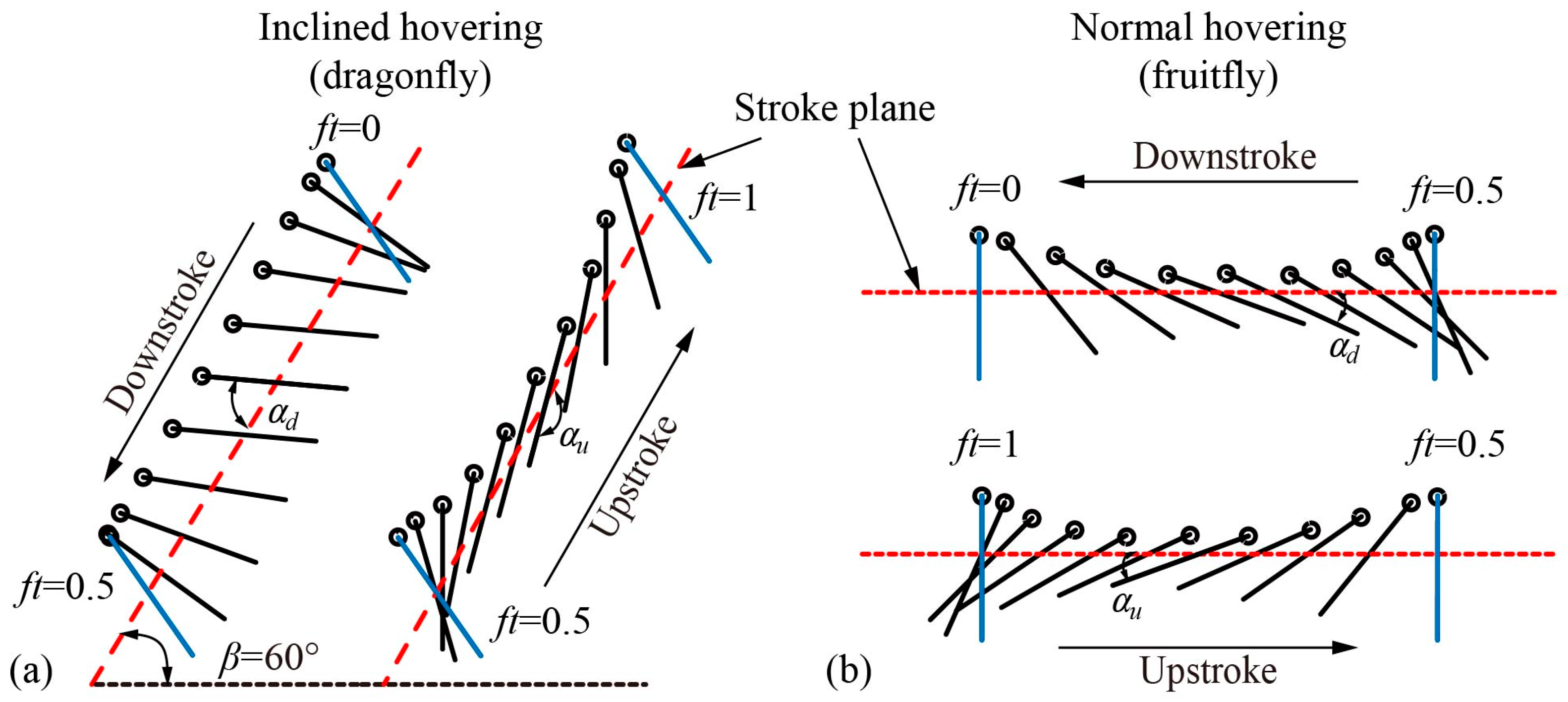
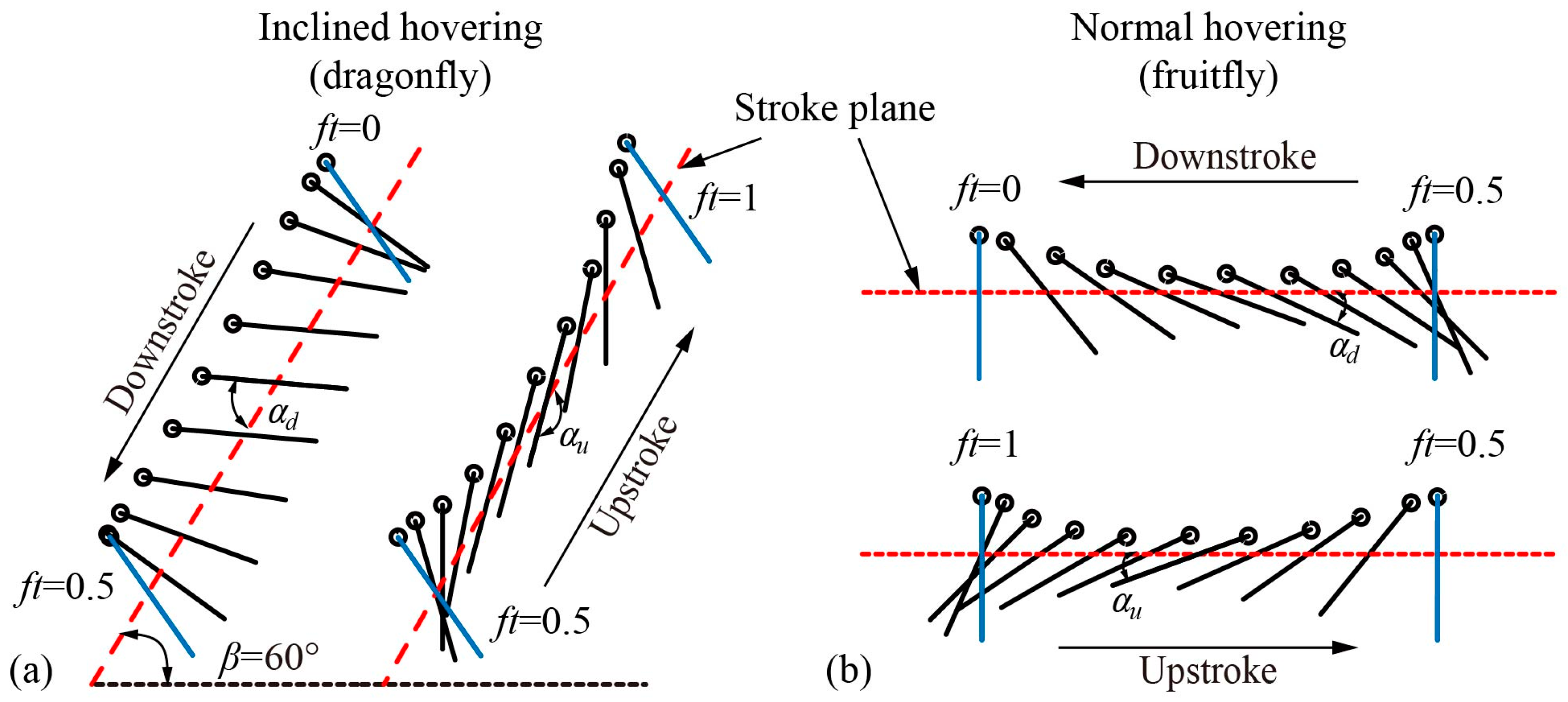
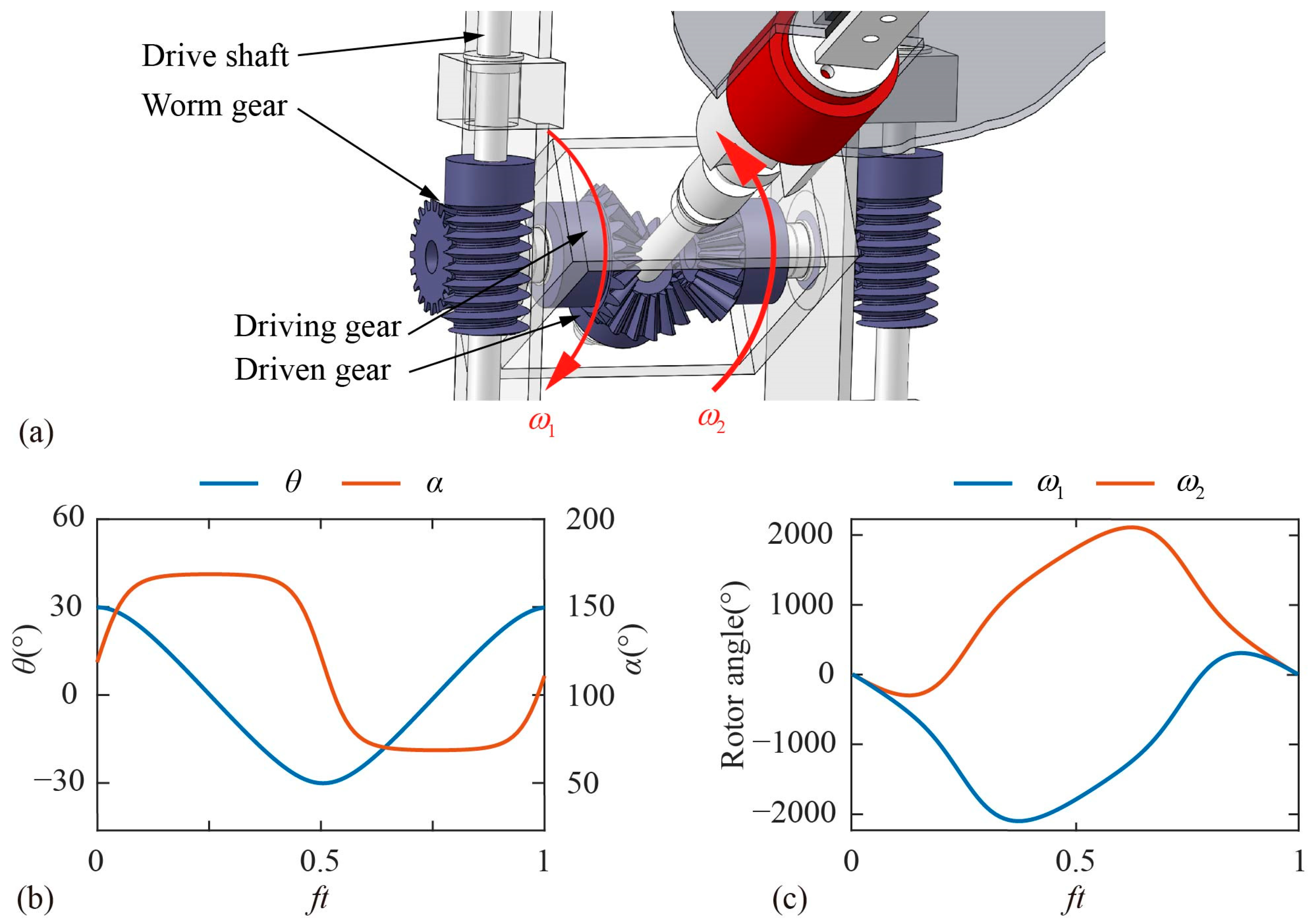
2.1. The Kinematic Characteristics of Inclined Hovering
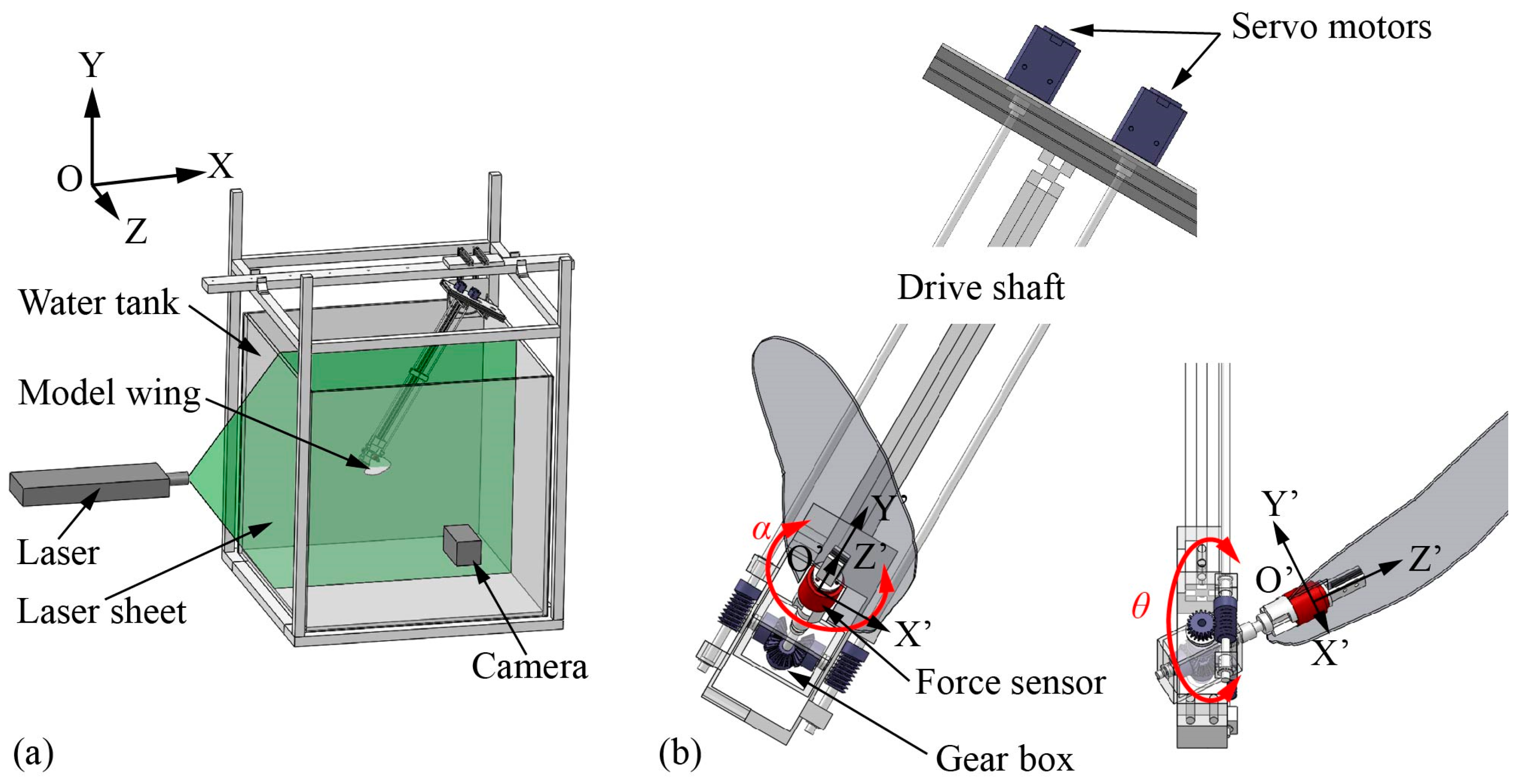
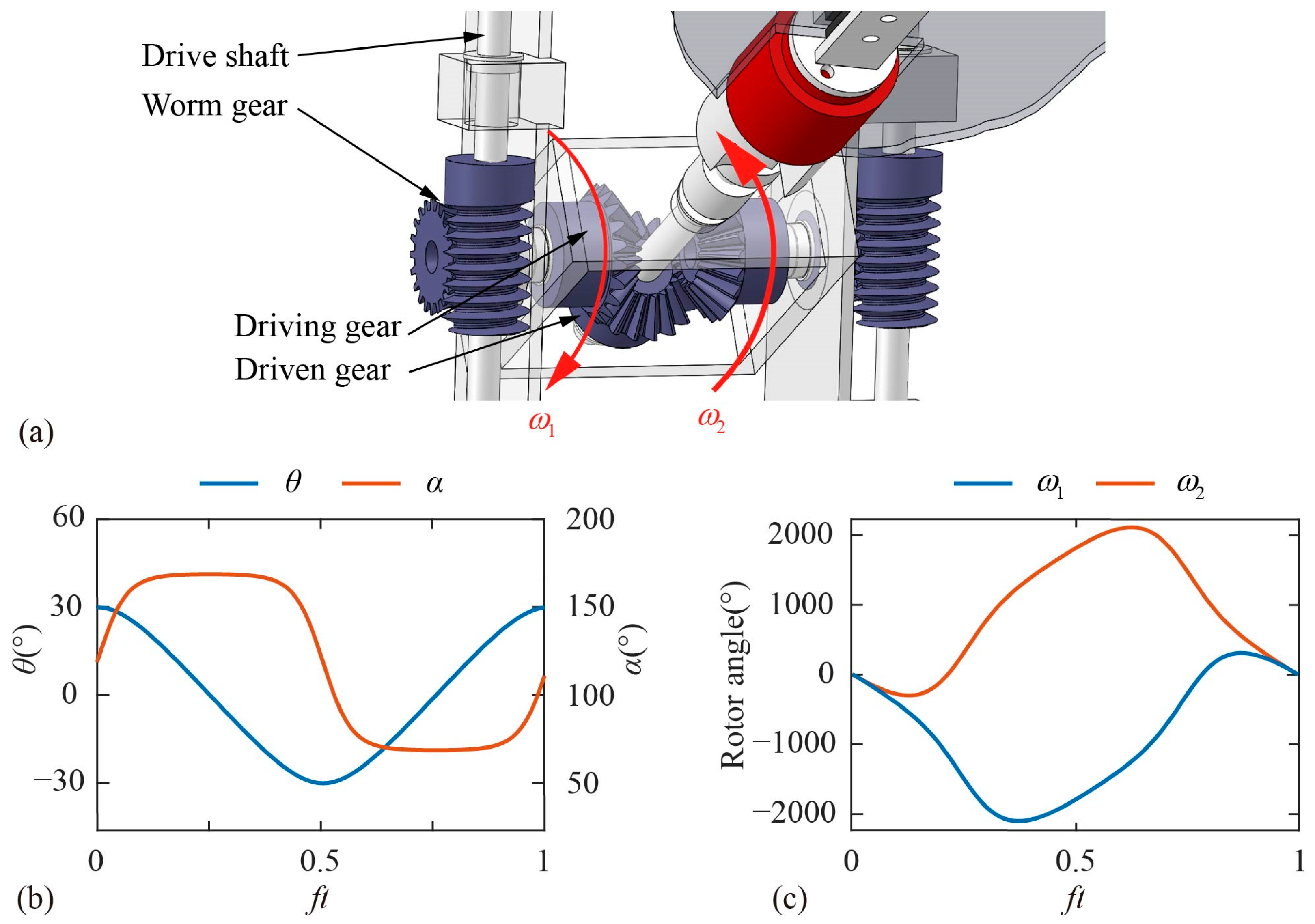
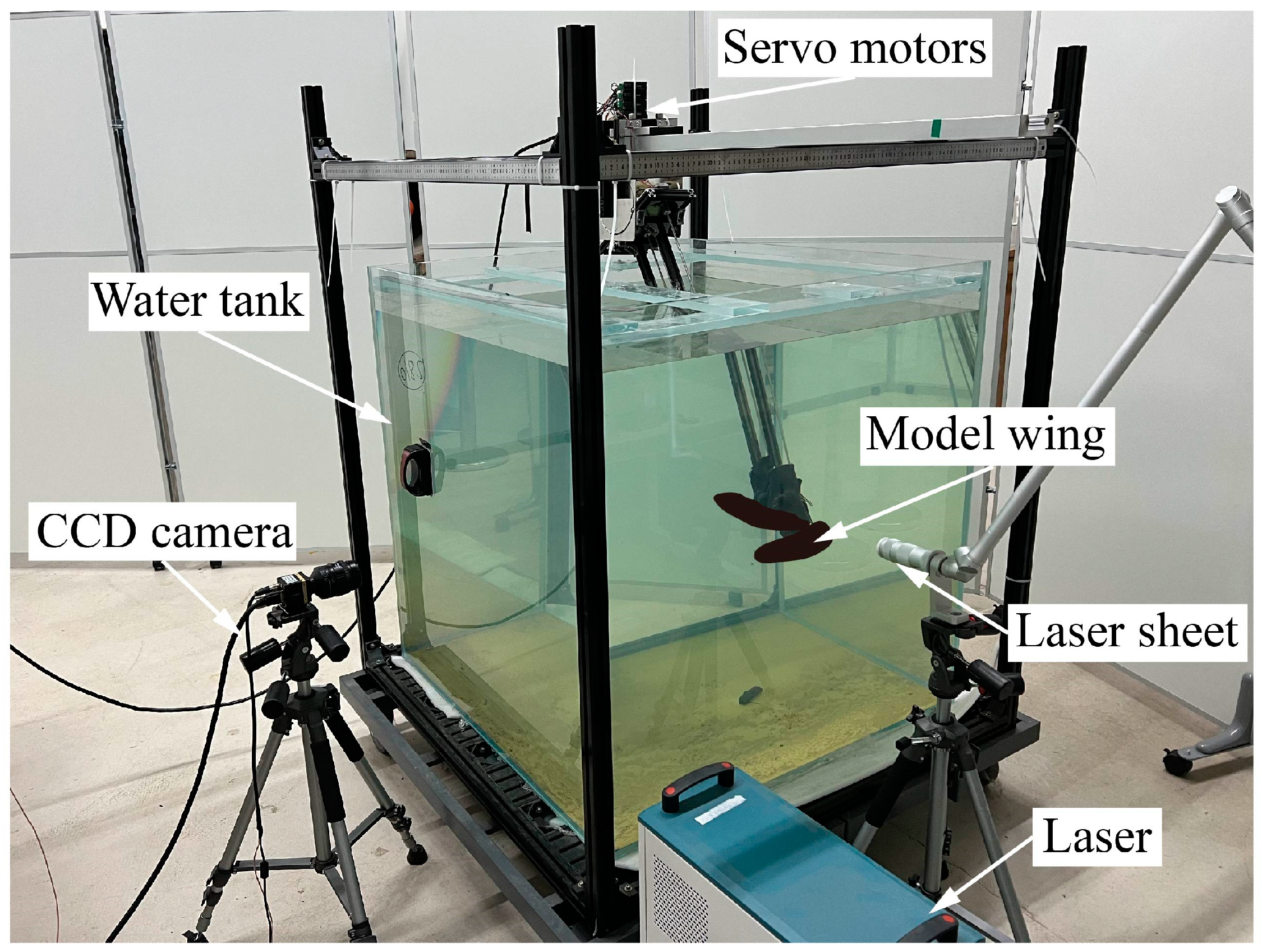
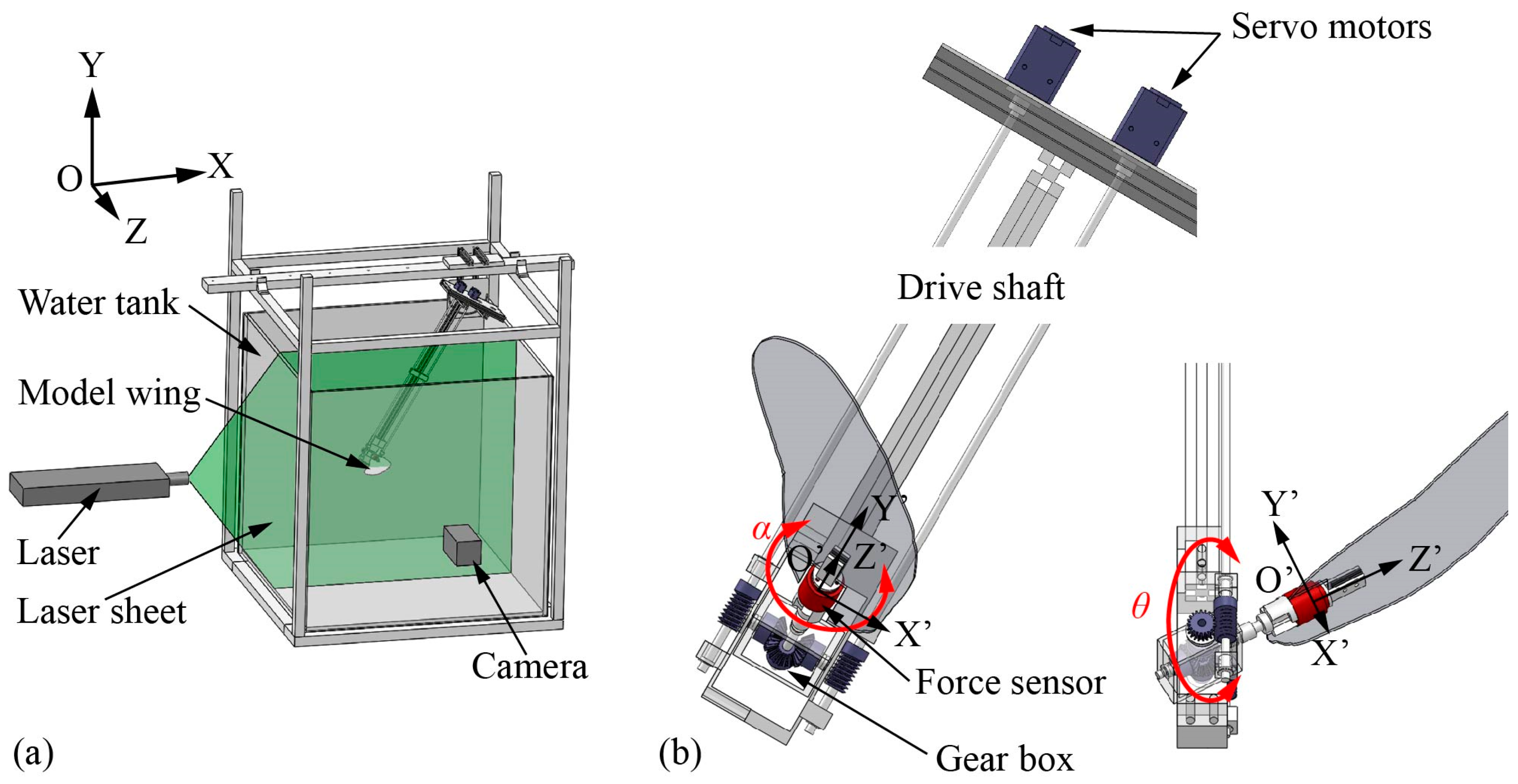
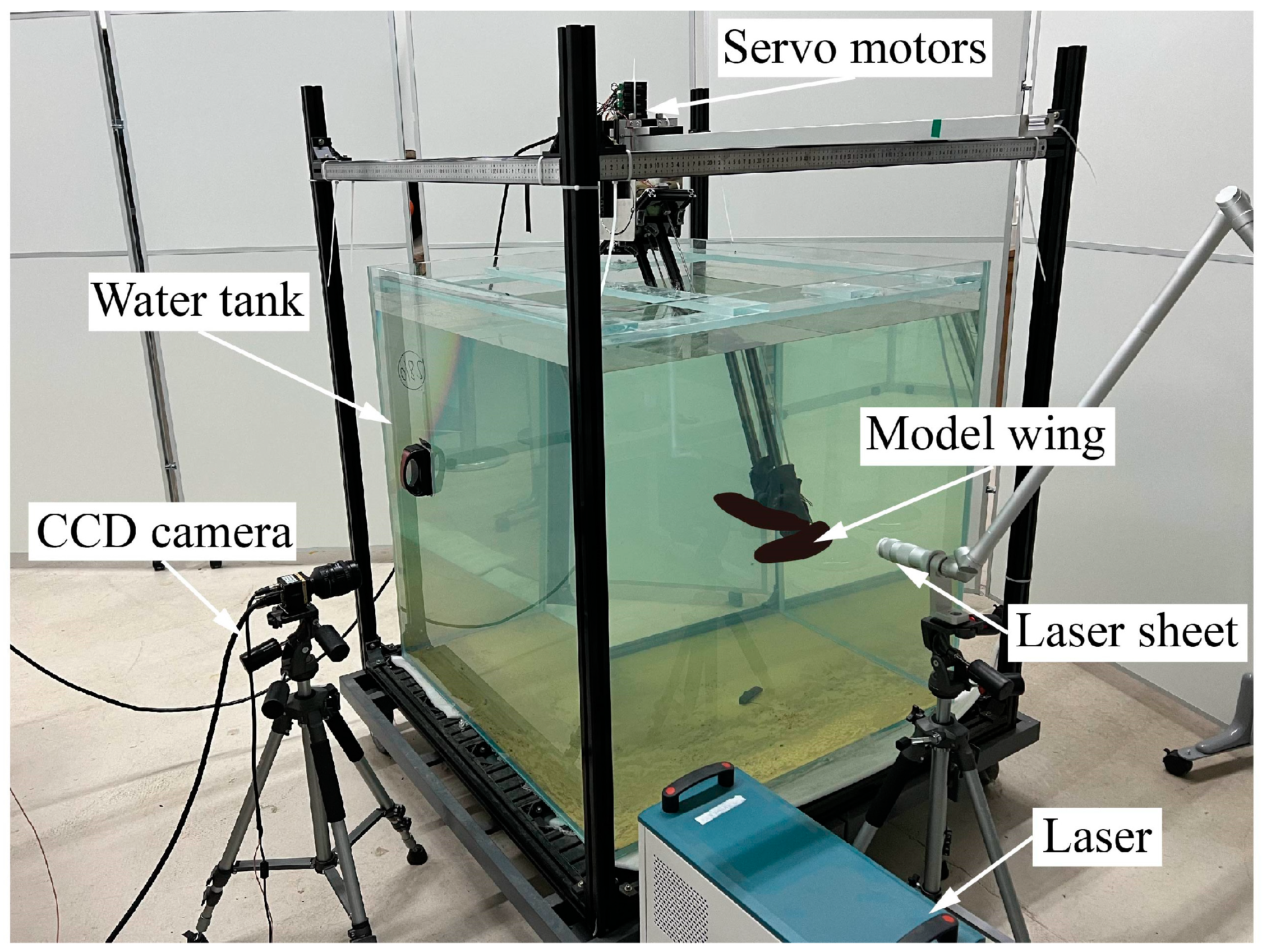
2.2. Experiment Setup
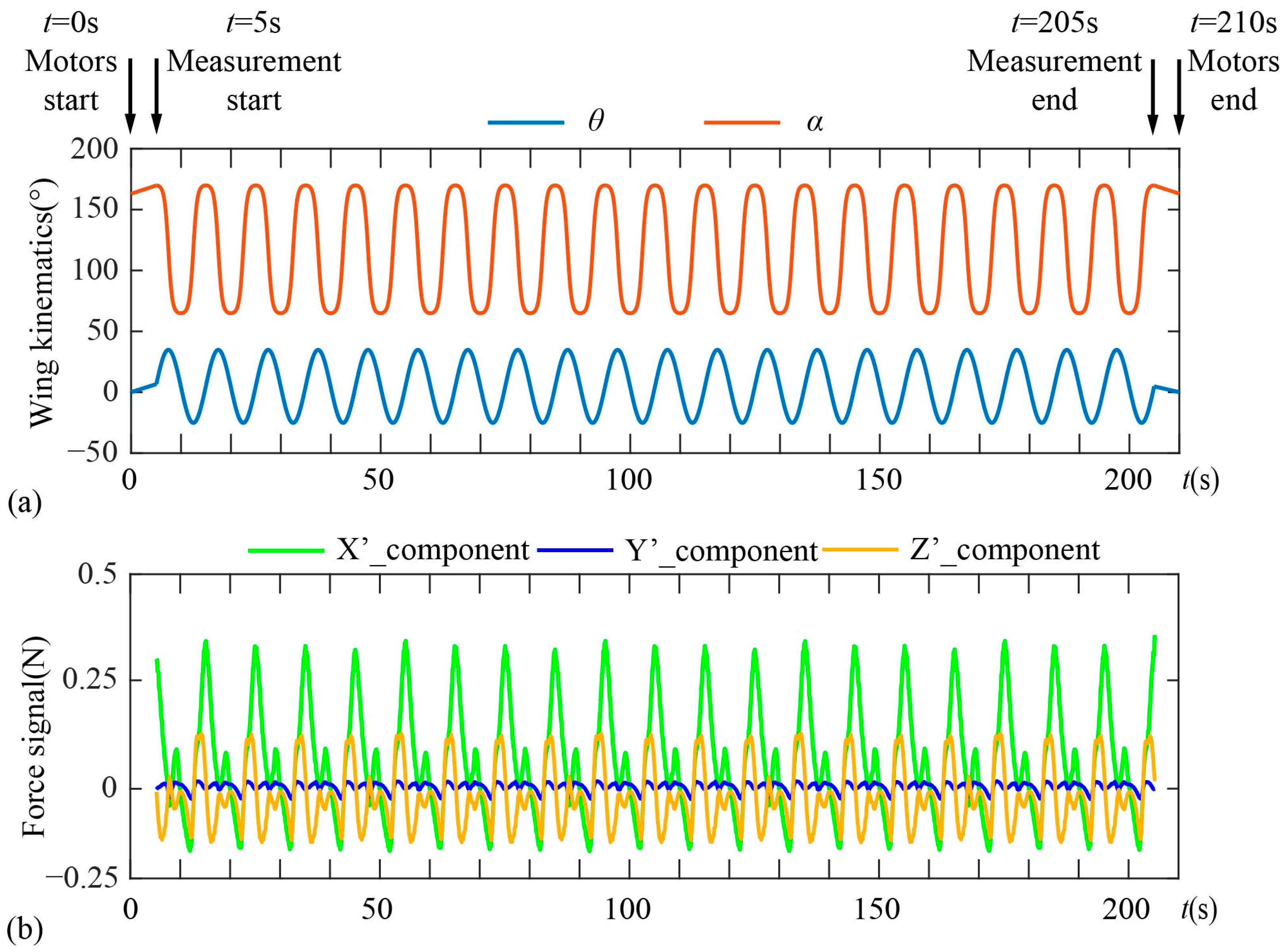
2.3. Force Measurement
2.4. PIV Measurement
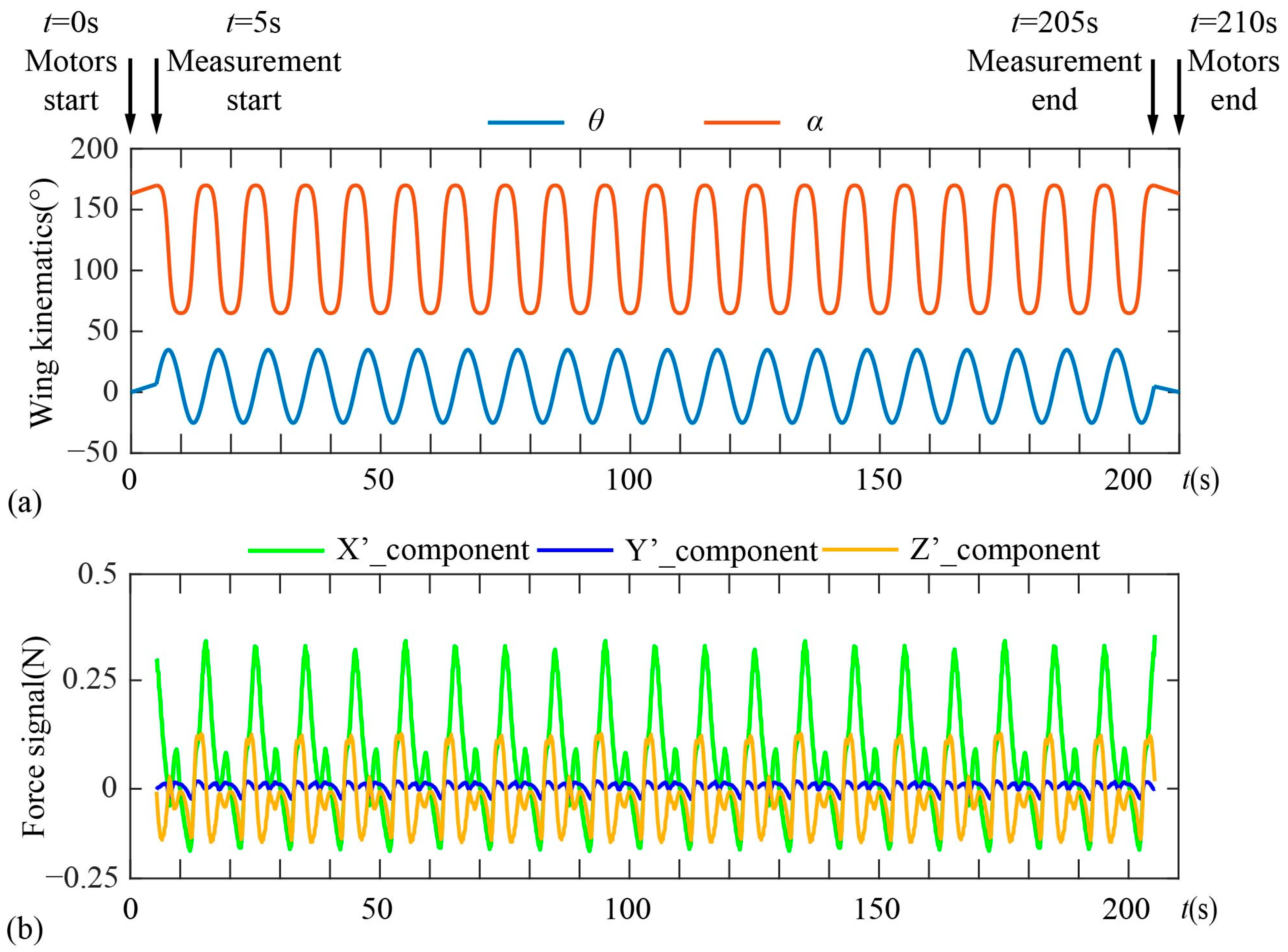
2.5. Temporal Procedure for the Experiment
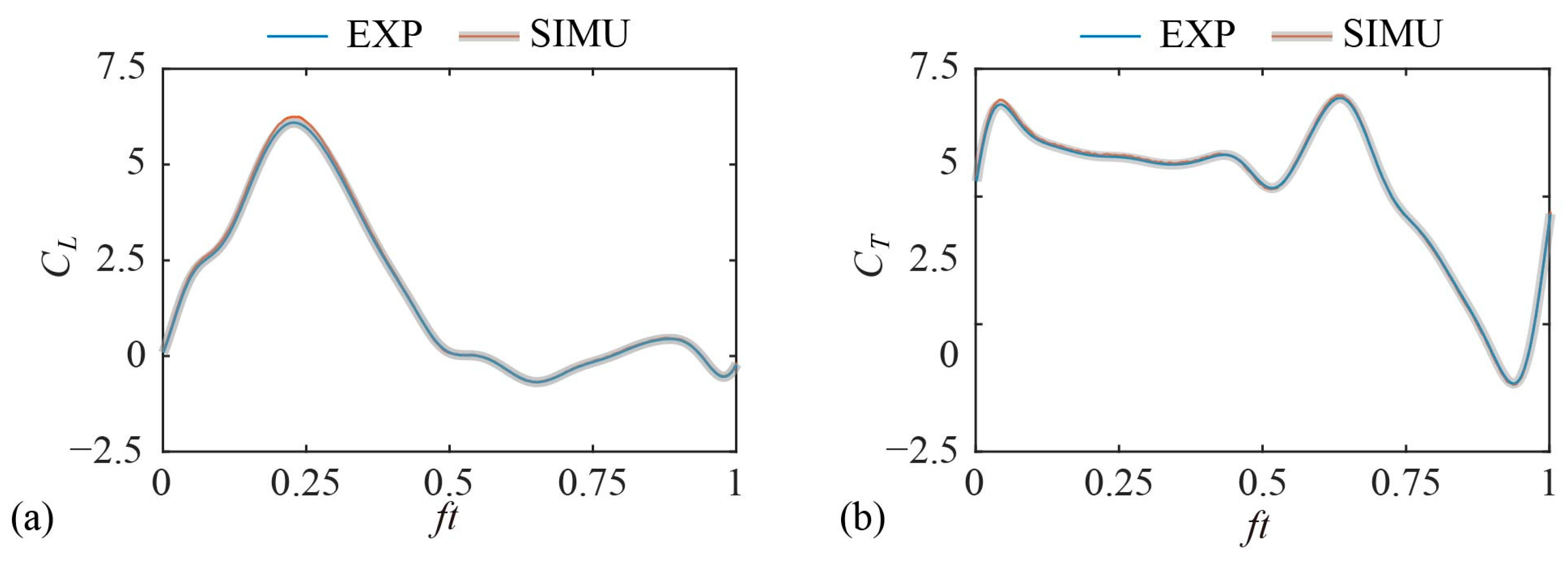
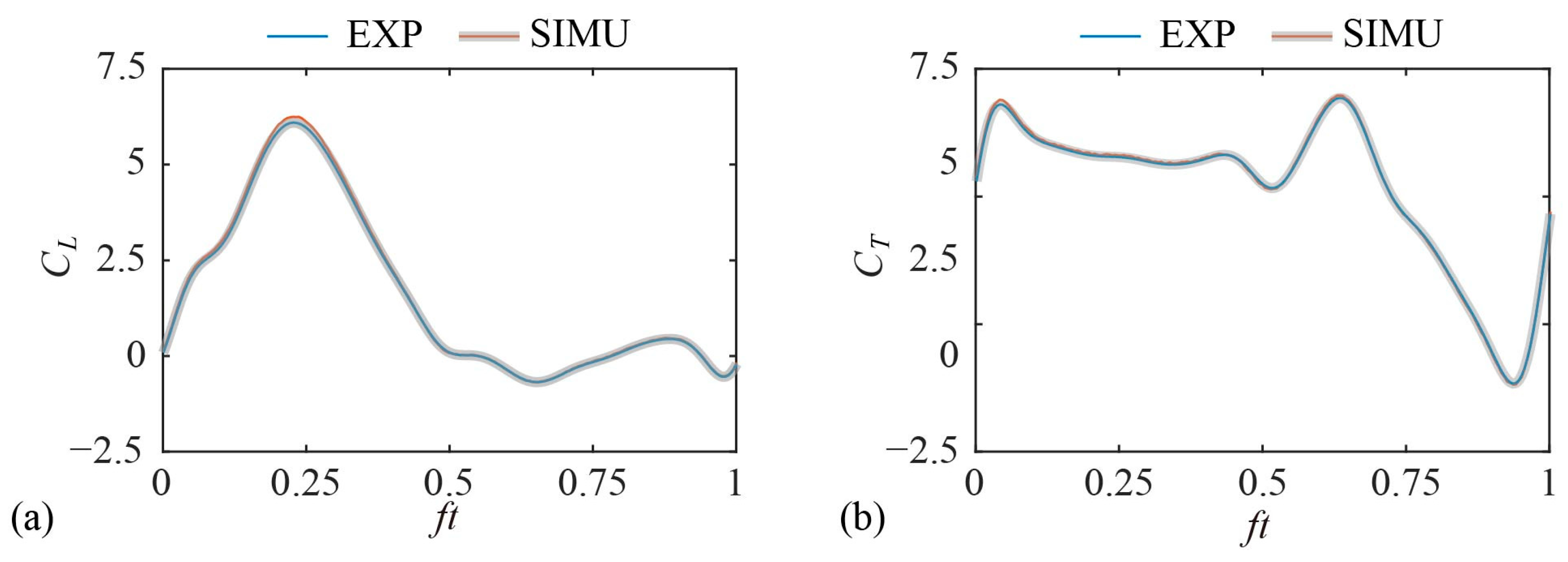
2.6. Validation
3. Results and Discussion
3.1. Characterization of Inclined Hovering with Different αd
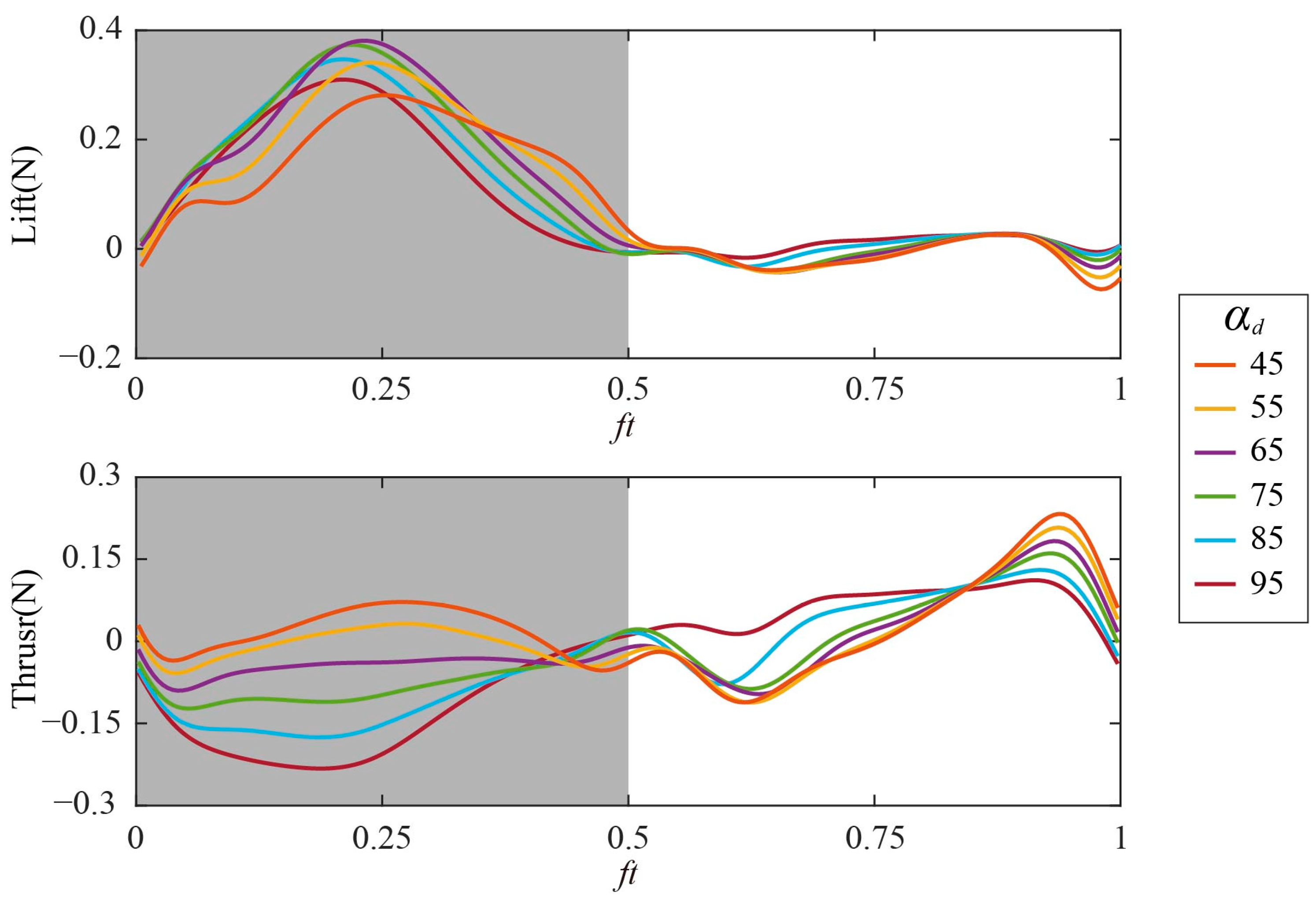
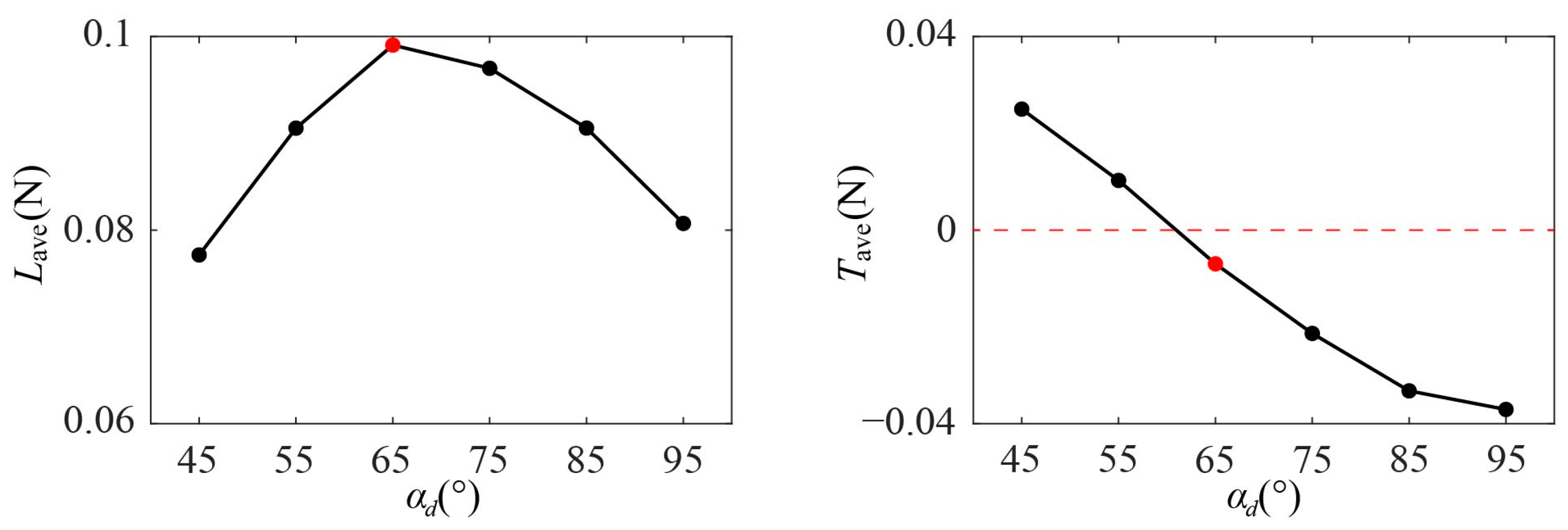
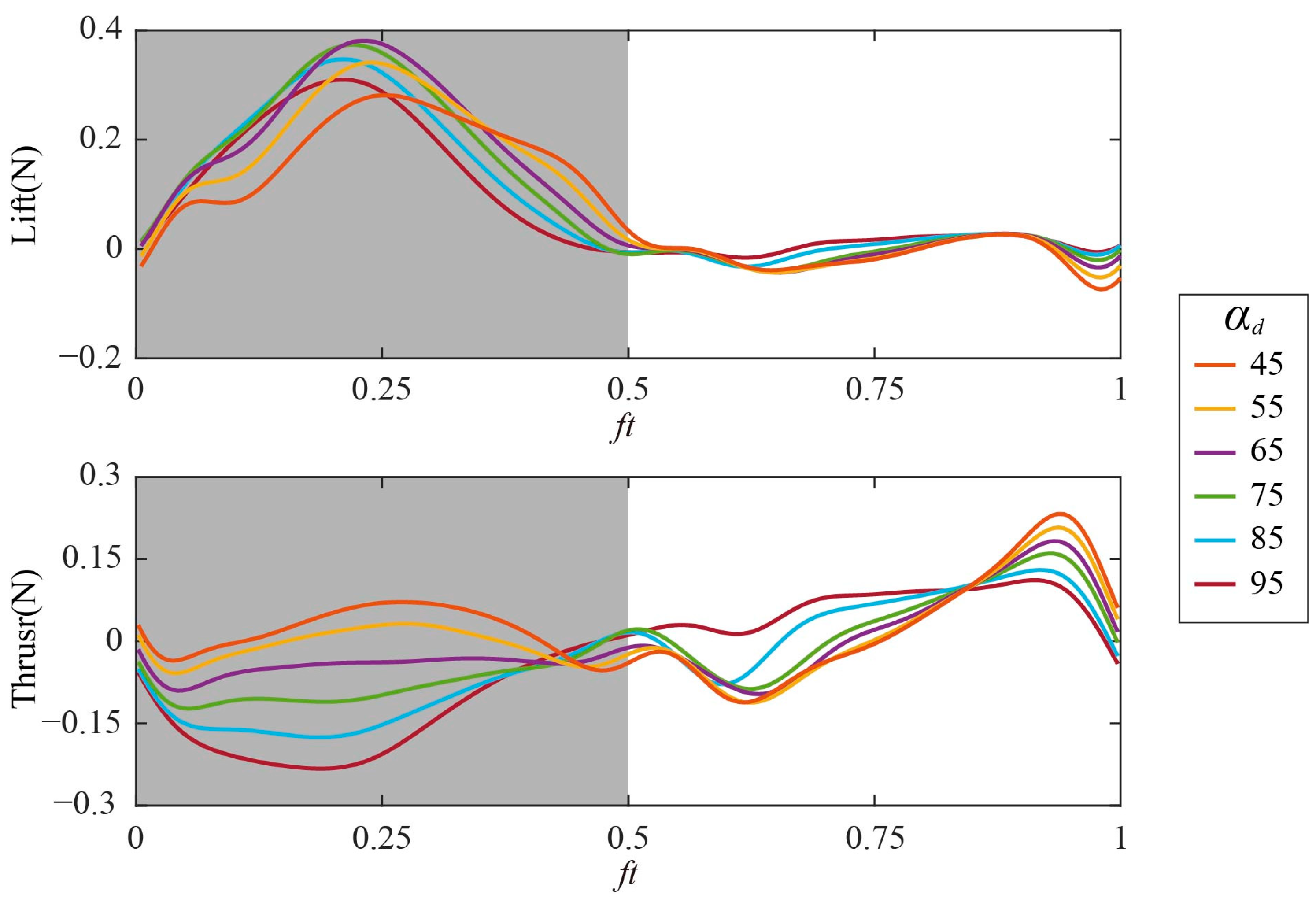
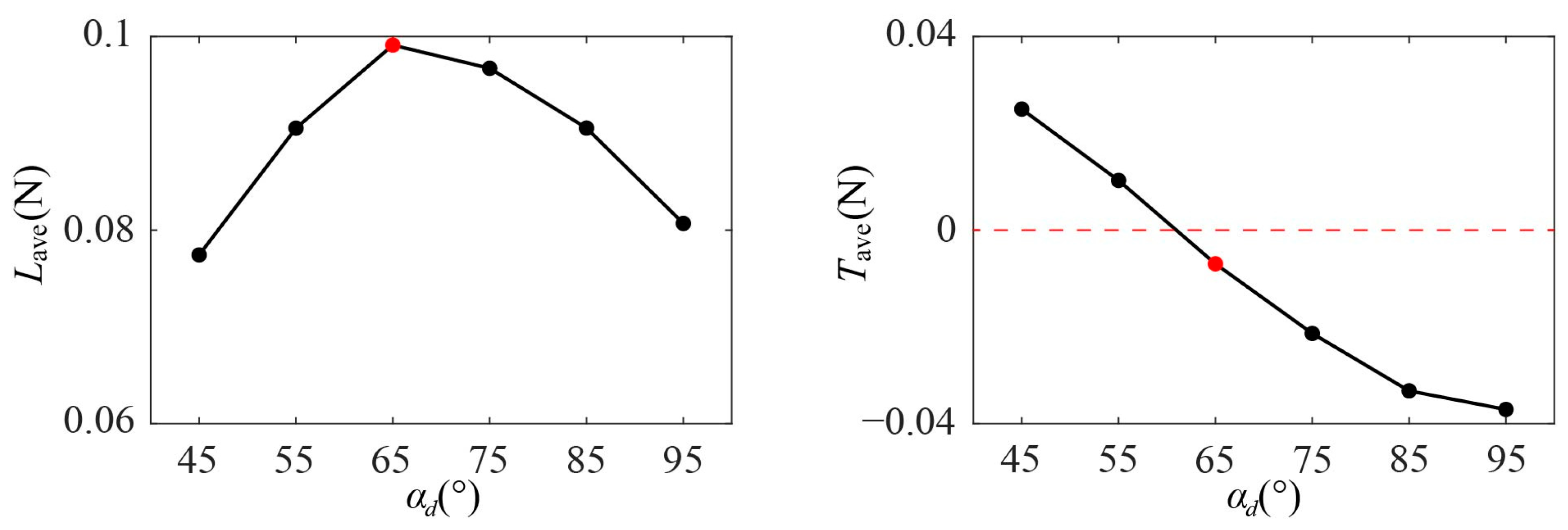
3.1.1. Time Courses of Aerodynamic Force
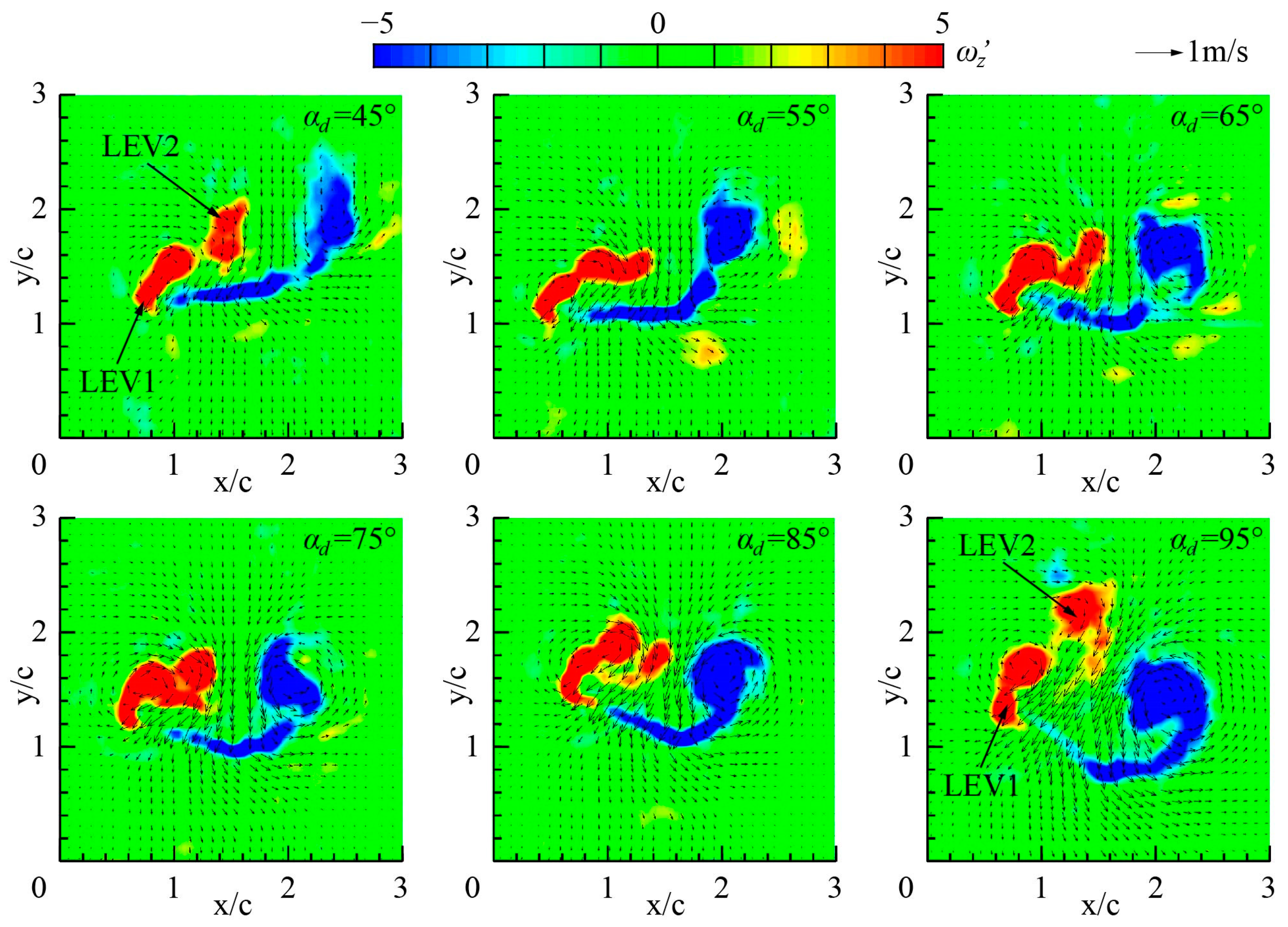
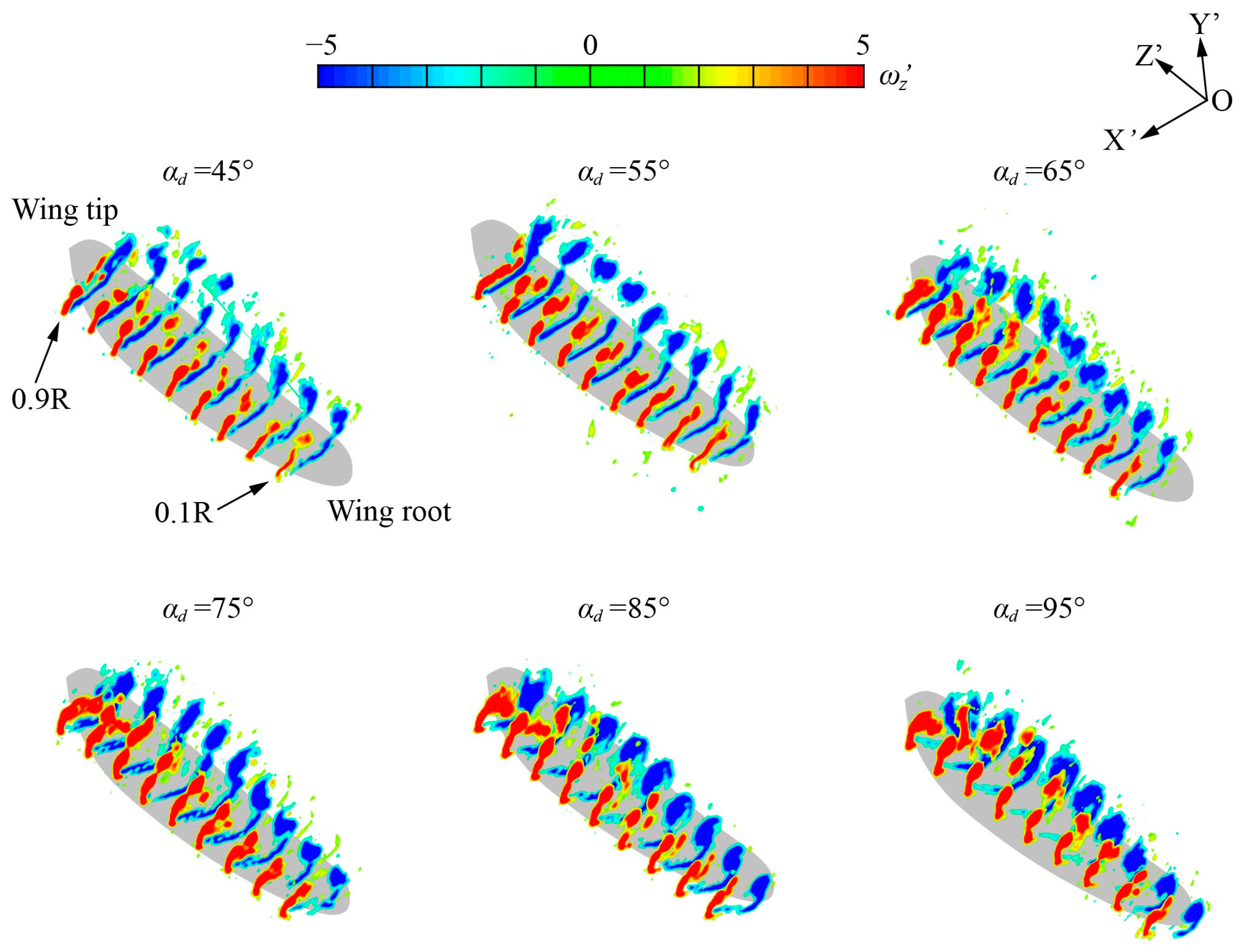
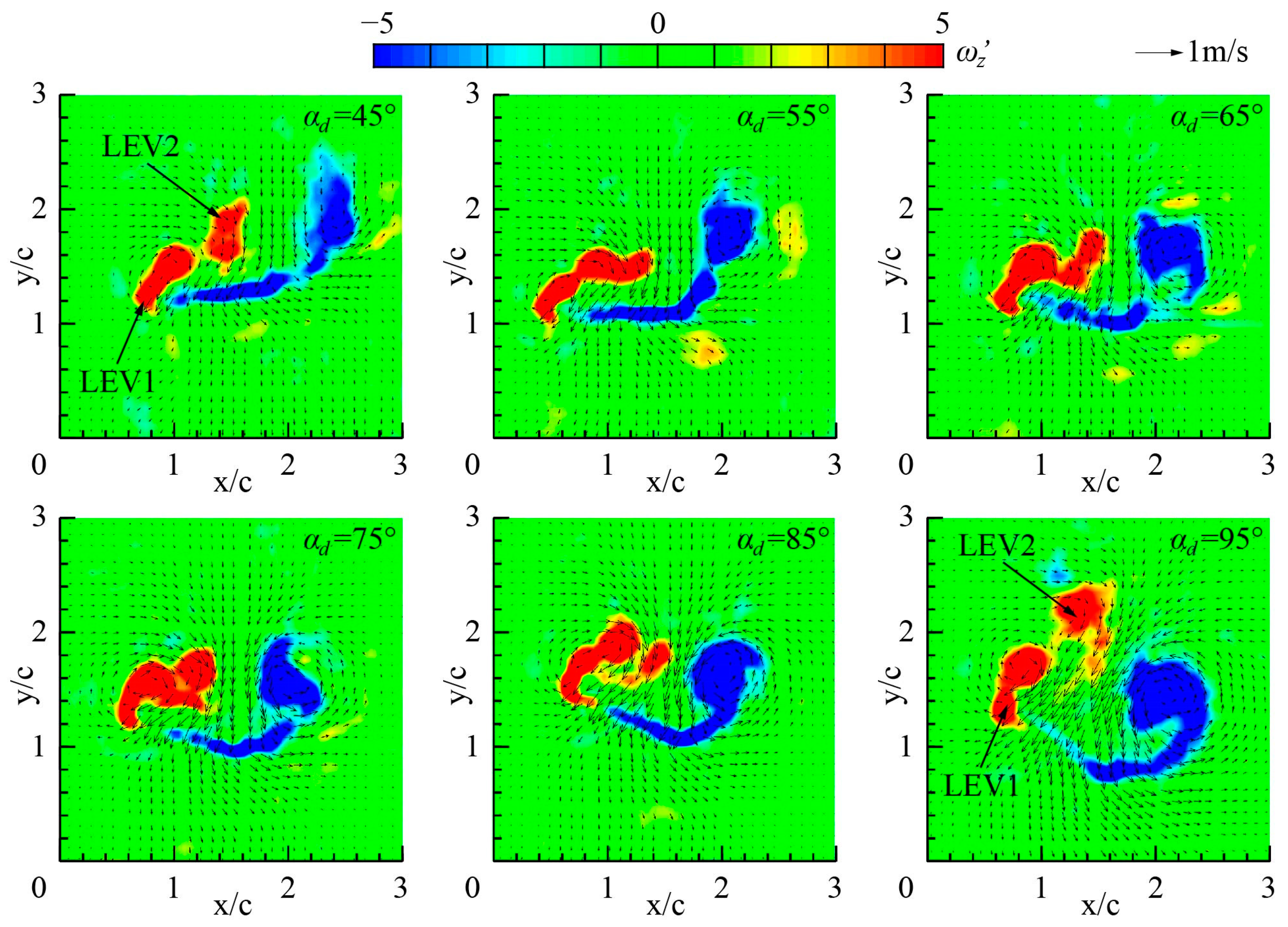
3.1.2. Vortex Structure at Mid-Downstroke
3.2. Characterization of Inclined Hovering with Different αu
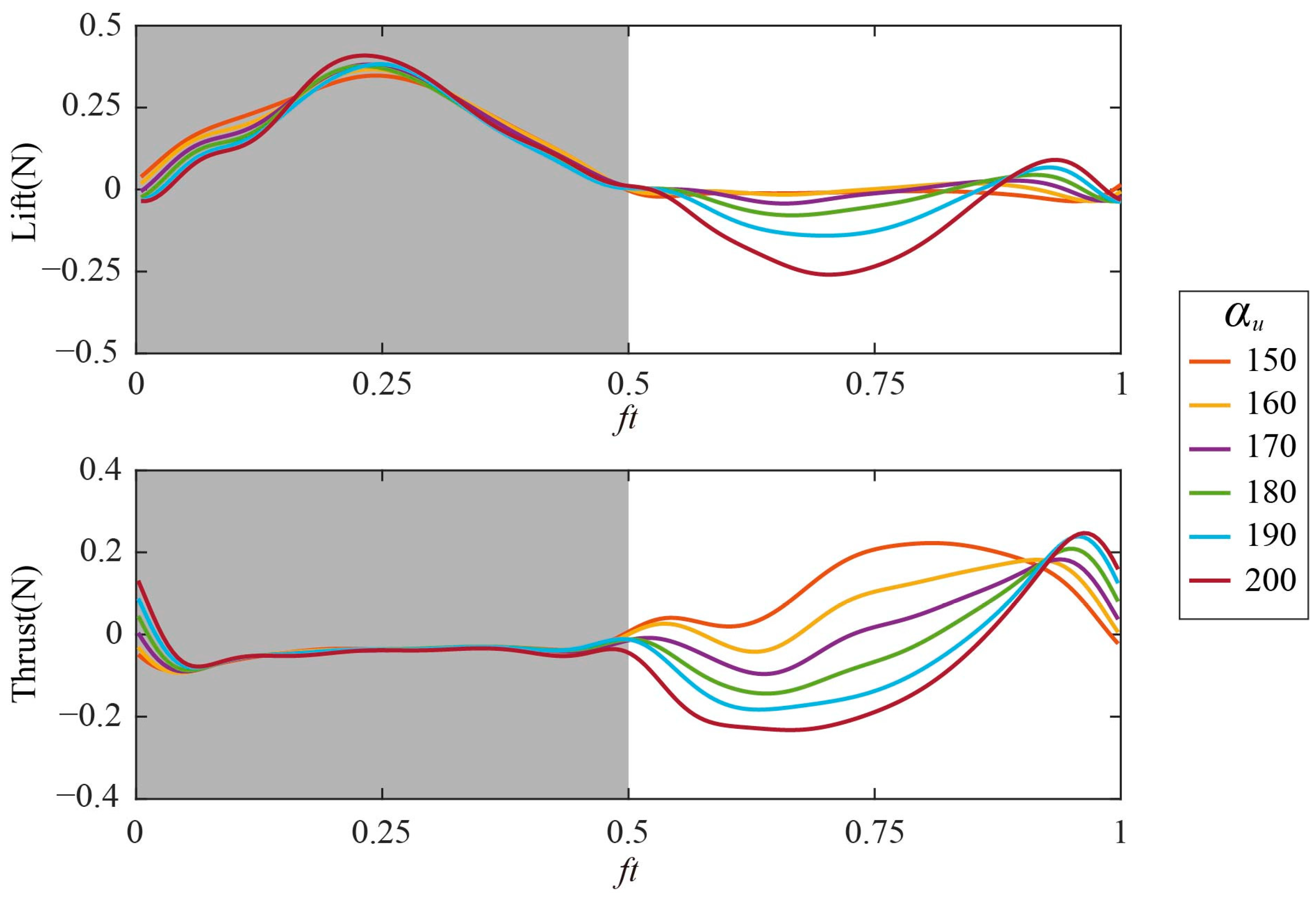
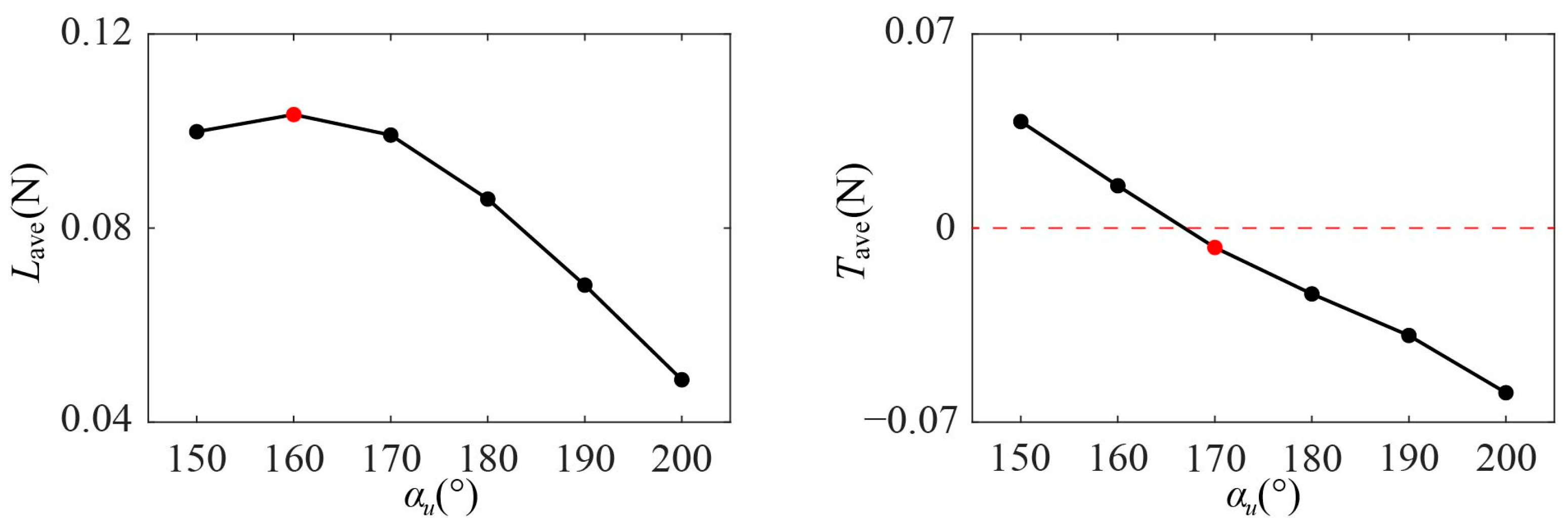
3.2.1. Time Courses of Aerodynamic Force
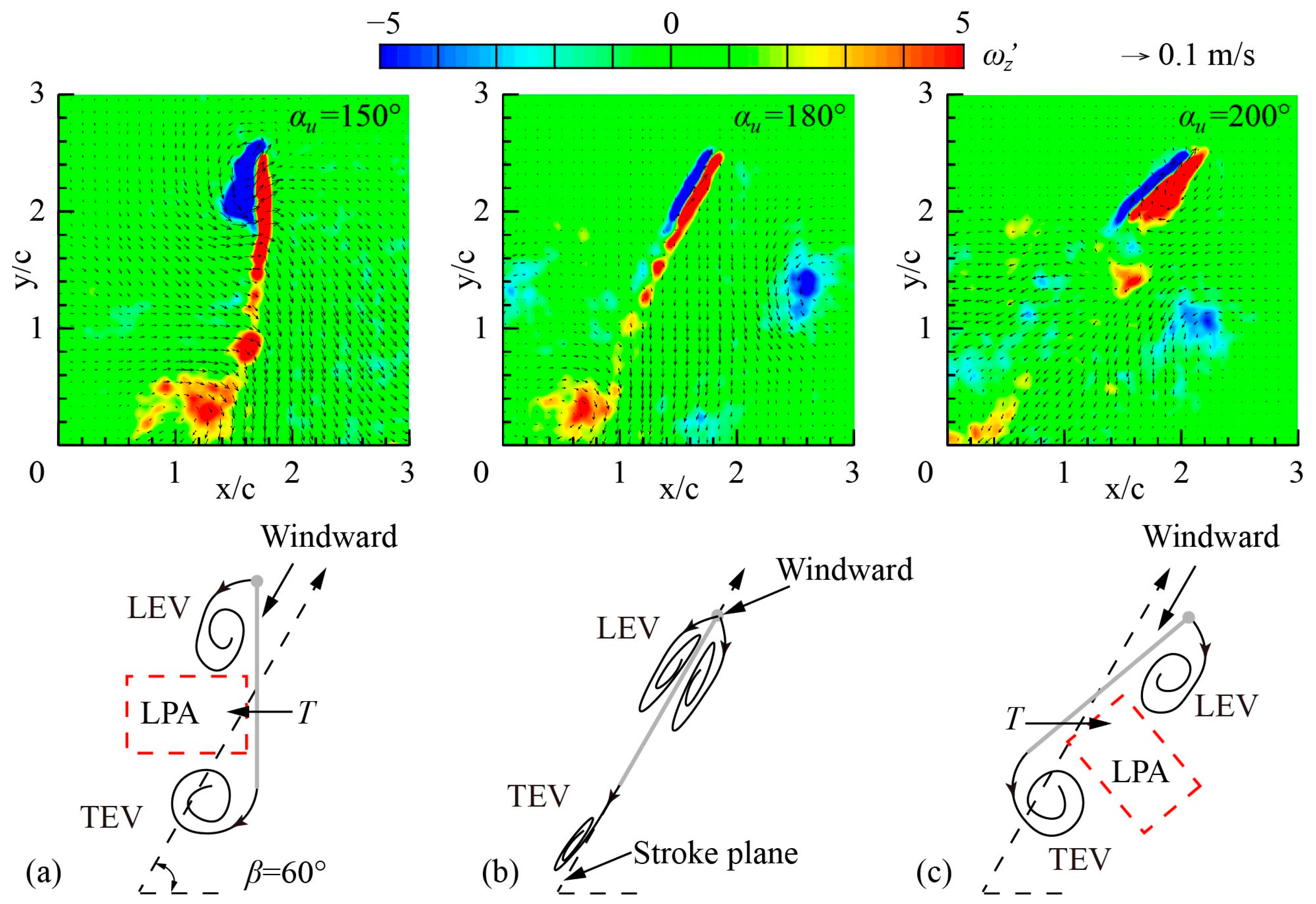
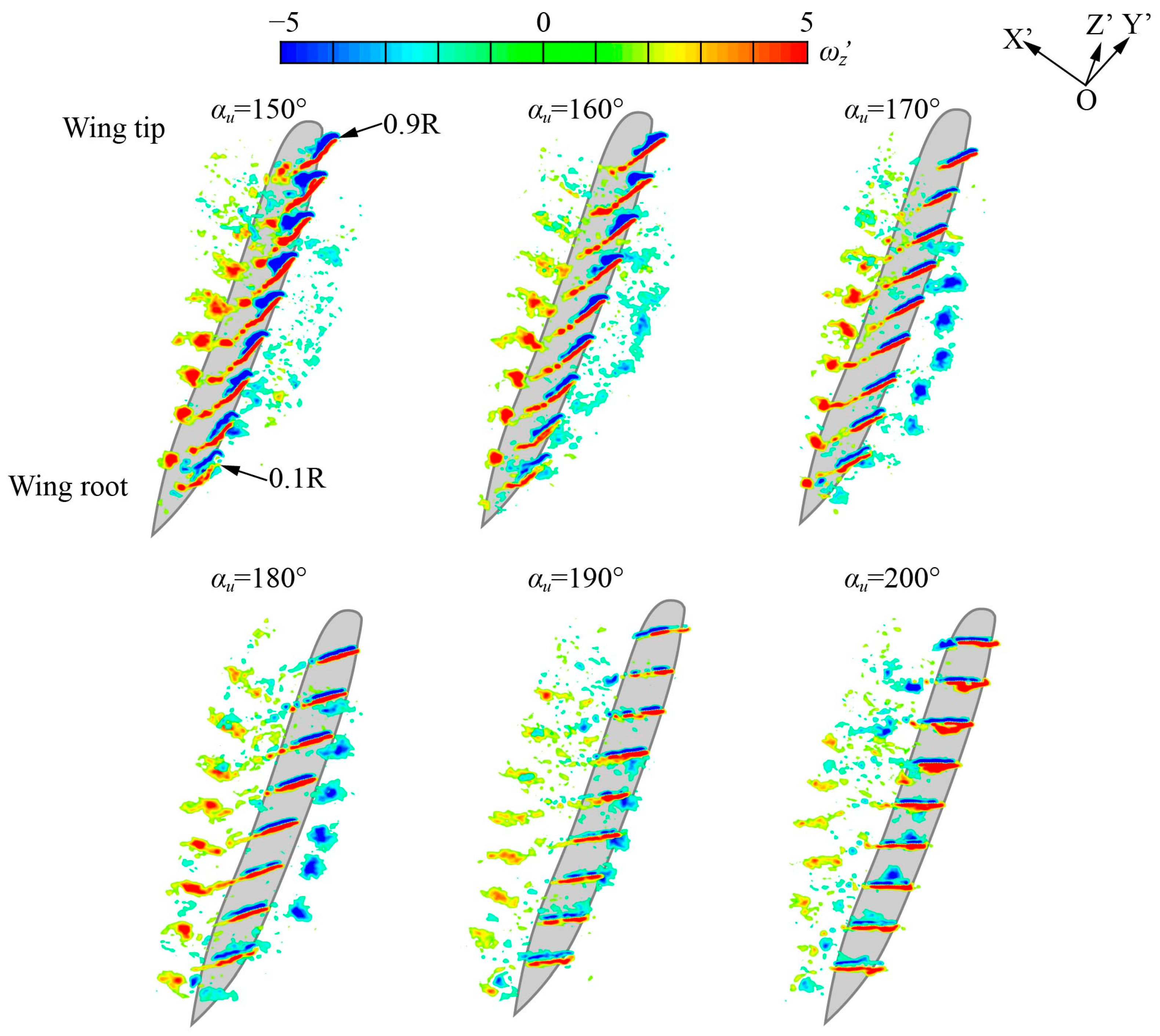
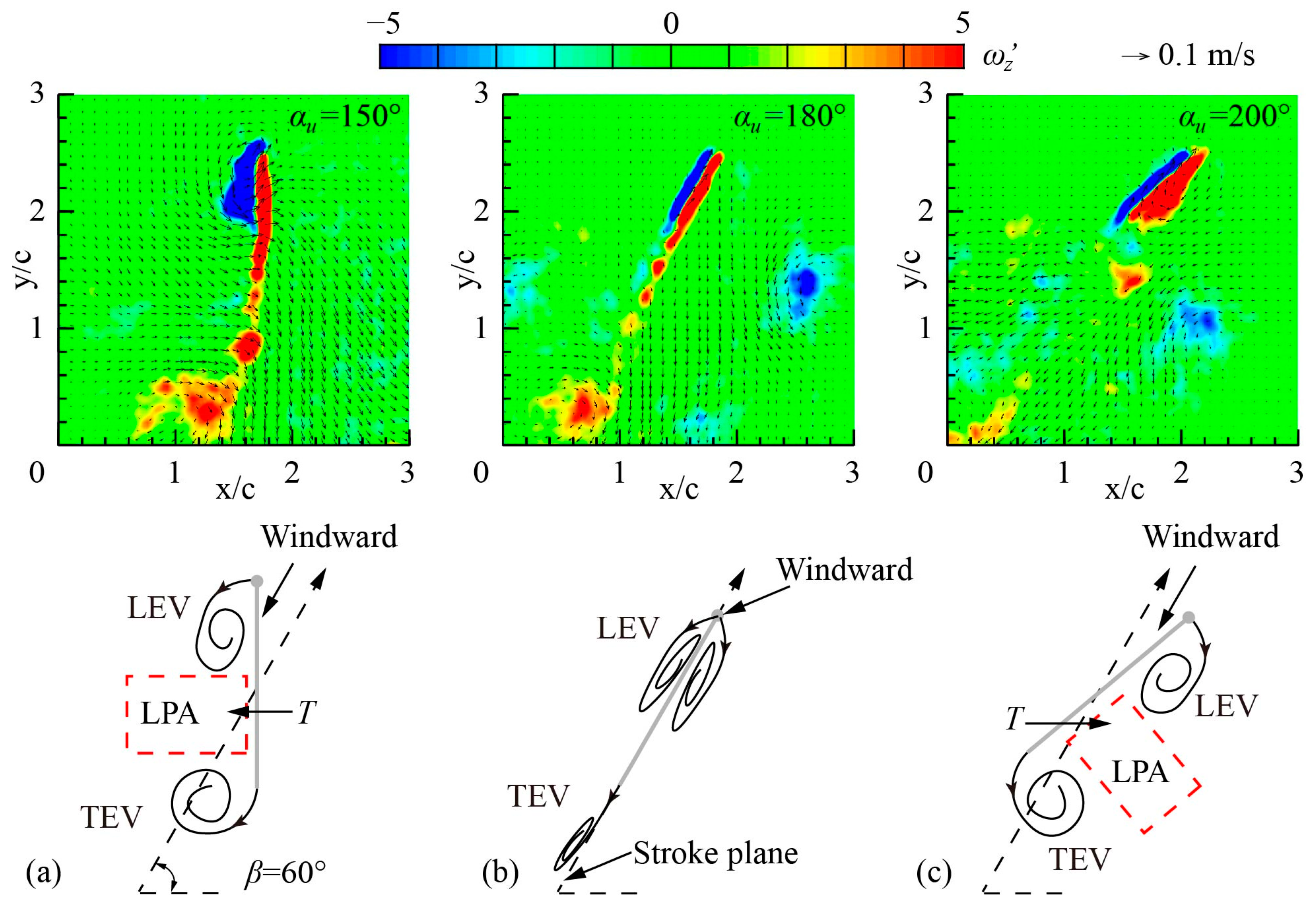
3.2.2. Vortex Structure at Mid-Upstroke
3.3. The Three-Dimensional Vortex Structure of Inclined Hovering
3.3.1. The Three-Dimensional Vortex Structure of Group 1 at Mid-Downstroke
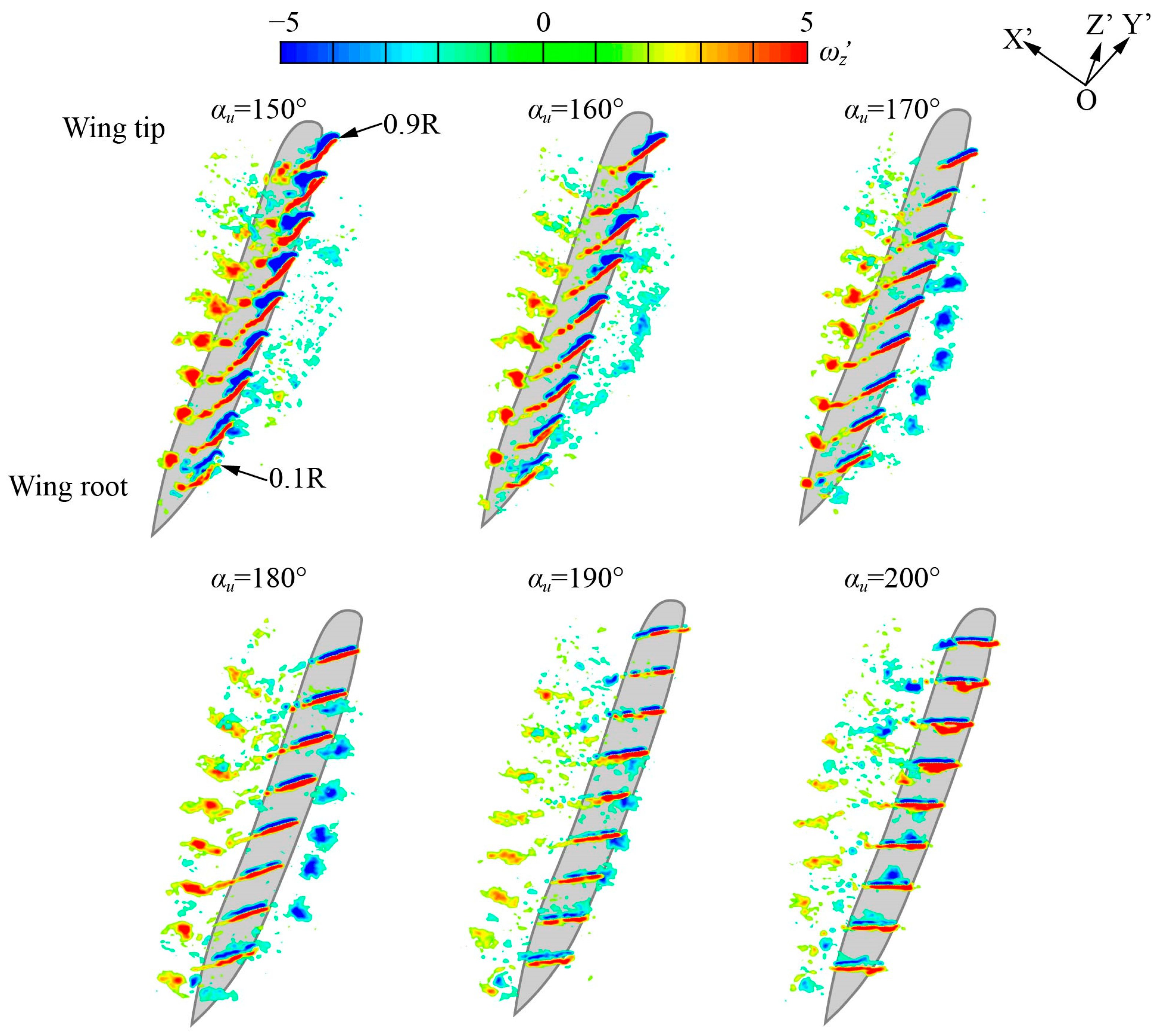
3.3.2. The Three-Dimensional Vortex Structure of Group 2 at Mid-Upstroke
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Ellington, C.P.; Kawachi, K.; van den Berg, C.; Willmott, A.P. A computational fluid dynamic study of hawkmoth hovering. J. Exp. Biol. 1998, 201, 461–477. [Google Scholar] [CrossRef] [PubMed]
- Smith, C.W.; Żbikowski, R. On aerodynamic modelling of an insect–like flapping wing in hover for micro air vehicles. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2002, 360, 273–290. [Google Scholar] [CrossRef]
- Shyy, W.; Liu, H. Flapping Wings and Aerodynamic Lift: The Role of Leading-Edge Vortices. AIAA J. 2007, 45, 2817–2819. [Google Scholar] [CrossRef]
- Aono, H.; Liang, F.; Liu, H. Near- and far-field aerodynamics in insect hovering flight: An integrated computational study. J. Exp. Biol. 2008, 211, 239–257. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Viieru, D.; Shyy, W. Effects of Reynolds Number and Flapping Kinematics on Hovering Aerodynamics. AIAA J. 2008, 46, 967–976. [Google Scholar] [CrossRef]
- Cheng, X.; Sun, M. Very small insects use novel wing flapping and drag principle to generate the weight-supporting vertical force. J. Fluid Mech. 2018, 855, 646–670. [Google Scholar] [CrossRef]
- Eldredge, J.D.; Jones, A.R. Leading-Edge Vortices: Mechanics and Modeling. Annu. Rev. Fluid Mech. 2019, 51, 75–104. [Google Scholar] [CrossRef]
- Jardin, T.; Farcy, A.; David, L. Three-dimensional effects in hovering flapping flight. J. Fluid Mech. 2012, 702, 102–125. [Google Scholar] [CrossRef]
- Bazov, D.I. Helicopter Aerodynamics; National Aeronautics and Space Administration: Washington, DC, USA, 1972; Volume 675.
- Ellington, C.P. Limitations on Animal Flight Performance. J. Exp. Biol. 1991, 160, 71–91. [Google Scholar] [CrossRef]
- Ellington, C.P.; Machin, K.E.; Casey, T.M. Oxygen consumption of bumblebees in forward flight. Nature 1990, 347, 472–473. [Google Scholar] [CrossRef]
- Sun, M.; Wu, J.H. Aerodynamic force generation and power requirements in forward flight in a fruit fly with modeled wing motion. J. Exp. Biol. 2003, 206, 3065–3083. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Hedrick, T.; Mittal, R. A comparative study of the hovering efficiency of flapping and revolving wings. Bioinspiration Biomim. 2013, 8, 036001. [Google Scholar] [CrossRef] [PubMed]
- Weis-Fogh, T. Quick Estimates of Flight Fitness in Hovering Animals, Including Novel Mechanisms for Lift Production. J. Exp. Biol. 1973, 59, 169–230. [Google Scholar] [CrossRef]
- Nasir, N.; Mat, S. An automated visual tracking measurement for quantifying wing and body motion of free-flying houseflies. Measurement 2019, 143, 267–275. [Google Scholar] [CrossRef]
- Ellington, C. The aerodynamics of hovering insect flight. III. Kinematics. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1984, 305, 41–78. [Google Scholar]
- Li, Q.; Zheng, M.; Pan, T.; Su, G. Experimental and Numerical Investigation on Dragonfly Wing and Body Motion during Voluntary Take-off. Sci. Rep. 2018, 8, 1011. [Google Scholar] [CrossRef] [PubMed]
- Norberg, R.Å. Hovering Flight of the Dragonfly Aeschna Juncea L., Kinematics and Aerodynamics. In Swimming and Flying in Nature: Volume 2; Wu, T.Y.T., Brokaw, C.J., Brennen, C., Eds.; Springer US: Boston, MA, USA, 1975; pp. 763–781. [Google Scholar]
- Su, G.; Dudley, R.; Pan, T.; Zheng, M.; Peng, L.; Li, Q. Maximum aerodynamic force production by the wandering glider dragonfly (Pantala flavescens, Libellulidae). J. Exp. Biol. 2020, 223, jeb218552. [Google Scholar] [CrossRef] [PubMed]
- Wakeling, J.; Ellington, C. Dragonfly flight. II. Velocities, accelerations and kinematics of flapping flight. J. Exp. Biol. 1997, 200, 557–582. [Google Scholar] [CrossRef] [PubMed]
- Willmott, A.P.; Ellington, C.P. The mechanics of flight in the hawkmoth Manduca sexta. I. Kinematics of hovering and forward flight. J. Exp. Biol. 1997, 200, 2705–2722. [Google Scholar] [CrossRef]
- Mou, X.L.; Liu, Y.P.; Sun, M. Wing motion measurement and aerodynamics of hovering true hoverflies. J. Exp. Biol. 2011, 214, 2832–2844. [Google Scholar] [CrossRef]
- Somps, C.; Luttges, M. Dragonfly Flight: Novel Uses of Unsteady Separated Flows. Science 1985, 228, 1326–1329. [Google Scholar] [CrossRef] [PubMed]
- Sun, M.; Lan, S.L. A computational study of the aerodynamic forces and power requirements of dragonfly (Aeschna juncea) hovering. J. Exp. Biol. 2004, 207, 1887–1901. [Google Scholar] [CrossRef] [PubMed]
- Thomas, A.L.R.; Taylor, G.K.; Srygley, R.B.; Nudds, R.L.; Bomphrey, R.J. Dragonfly flight: Free-flight and tethered flow visualizations reveal a diverse array of unsteady lift-generating mechanisms, controlled primarily via angle of attack. J. Exp. Biol. 2004, 207, 4299–4323. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.J. Two Dimensional Mechanism for Insect Hovering. Phys. Rev. Lett. 2000, 85, 2216–2219. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.J. The role of drag in insect hovering. J. Exp. Biol. 2004, 207, 4147–4155. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Choi, H. Two-dimensional mechanism of hovering flight by single flapping wing. J. Mech. Sci. Technol. 2007, 21, 207–221. [Google Scholar] [CrossRef]
- Sudhakar, Y.; Vengadesan, S. Flight force production by flapping insect wings in inclined stroke plane kinematics. Comput. Fluids 2010, 39, 683–695. [Google Scholar] [CrossRef]
- Dickinson, M.H.; Lehmann, F.O.; Sane, S.P. Wing rotation and the aerodynamic basis of insect flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef]
- Sane, S.P.; Dickinson, M.H. The control of flight force by a flapping wing: Lift and drag production. J. Exp. Biol. 2001, 204, 2607–2626. [Google Scholar] [CrossRef]
- Jardin, T.; David, L.; Farcy, A. Characterization of vortical structures and loads based on time-resolved PIV for asymmetric hovering flapping flight. In Animal Locomotion; Springer: Berlin/Heidelberg, Germany, 2010; pp. 285–295. [Google Scholar]
- Park, H.; Choi, H. Kinematic control of aerodynamic forces on an inclined flapping wing with asymmetric strokes. Bioinspiration Biomim. 2012, 7, 016008. [Google Scholar] [CrossRef]
- Zhu, H.J.; Sun, M. Unsteady aerodynamic force mechanisms of a hoverfly hovering with a short stroke-amplitude. Phys. Fluids 2017, 29, 081901. [Google Scholar] [CrossRef]
- Deepthi, S.; Vengadesan, S. Can the ground enhance vertical force for inclined stroke plane flapping wing? Bioinspiration Biomim. 2021, 16, 046010. [Google Scholar] [CrossRef] [PubMed]
- Deepthi, S.; Vengadesan, S. Role of Dipole Jet in Inclined Stroke Plane Kinematics of Insect Flight. J. Bionic Eng. 2020, 17, 161–173. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, C.; Xie, P. Numerical investigation on aerodynamic performance of a 2-D inclined hovering wing in asymmetric strokes. J. Mech. Sci. Technol. 2016, 30, 199–210. [Google Scholar] [CrossRef]
- Wu, D.; Yeo, K.S.; Lim, T.T. A numerical study on the free hovering flight of a model insect at low Reynolds number. Comput. Fluids 2014, 103, 234–261. [Google Scholar] [CrossRef]
- Karásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; de Croon, G.C.H.E. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Zhang, W.; Zhang, Z. Liftoff of an Electromagnetically Driven Insect-Inspired Flapping-Wing Robot. IEEE Trans. Robot. 2016, 32, 1285–1289. [Google Scholar] [CrossRef]
- Peng, L.; Pan, T.; Zheng, M.; Song, S.; Su, G.; Li, Q. Kinematics and Aerodynamics of Dragonflies (Pantala flavescens, Libellulidae) in Climbing Flight. Front. Bioeng. Biotechnol. 2022, 10, 795063. [Google Scholar] [CrossRef]
- Peng, L.S.; Zheng, M.Z.; Pan, T.Y.; Su, G.T.; Li, Q.S. Tandem-wing interactions on aerodynamic performance inspired by dragonfly hovering. R. Soc. Open Sci. 2021, 8, 202275. [Google Scholar] [CrossRef]
- Azuma, A.; Azuma, S.; Watanabe, I.; Furuta, T. Flight Mechanics of a Dragonfly. J. Exp. Biol. 1985, 116, 79–107. [Google Scholar] [CrossRef]
- Wang, H.; Zeng, L.J.; Liu, H.; Yin, C.Y. Measuring wing kinematics, flight trajectory and body attitude during forward flight and turning maneuvers in dragonflies. J. Exp. Biol. 2003, 206, 745–757. [Google Scholar] [CrossRef] [PubMed]
- Bhat, S.S.; Hourigan, K.; Sheridan, J.; Thompson, M.C.; Zhao, J. Effects of flapping-motion profiles on insect-wing aerodynamics. J. Fluid Mech. 2020, 884, A8. [Google Scholar] [CrossRef]
- Kasoju, V.T.; Santhanakrishnan, A. Aerodynamic interaction of bristled wing pairs in fling. Phys. Fluids 2021, 33, 031901. [Google Scholar] [CrossRef]
- Mumtaz Qadri, M.N.; Zhao, F.; Tang, H. Fluid-structure interaction of a fully passive flapping foil for flow energy extraction. Int. J. Mech. Sci. 2020, 177, 105587. [Google Scholar] [CrossRef]
- Birch, J.M.; Dickinson, M.H. The influence of wing–wake interactions on the production of aerodynamic forces in flapping flight. J. Exp. Biol. 2003, 206, 2257–2272. [Google Scholar] [CrossRef] [PubMed]
- Cieślik, A.R.; Akkermans, R.A.D.; Kamp, L.P.J.; Clercx, H.J.H.; van Heijst, G.J.F. Dipole-wall collision in a shallow fluid. Eur. J. Mech.-B/Fluids 2009, 28, 397–404. [Google Scholar] [CrossRef]
- Yi, Y.; Liu, P.; Hu, T.; Qu, Q.; Akkermans, R.A.D. Experimental investigations on co-rotating vortex pair merger in convergent/divergent channel flow with single-side-wall deflection. Exp. Fluids 2018, 59, 188. [Google Scholar] [CrossRef]
- Ansari, S.A.; Żbikowski, R.; Knowles, K. Aerodynamic modelling of insect-like flapping flight for micro air vehicles. Prog. Aerosp. Sci. 2006, 42, 129–172. [Google Scholar] [CrossRef]
- Sun, M.; Tang, H. Unsteady aerodynamic force generation by a model fruit fly wing in flapping motion. J. Exp. Biol. 2002, 205, 55–70. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| θm | Cθ | θ0 | αm | Cα | αd | αu |
|---|---|---|---|---|---|---|
| 30° | 0.8 | 0° | 52.5° | 2.5 | 65° | 170° |
| Group | ID | αd | αu |
|---|---|---|---|
| Benchmark | 0 | 65° | 170° |
| Group 1 | 1–6 | 45°, 55°, 65°, 75°, 85°, 95° | 170° |
| Group 2 | 7–12 | 65° | 150°, 160°, 170°, 180°, 190°, 200° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, M.; Peng, L.; Su, G.; Pan, T.; Li, Q. Experimental Investigation on Aerodynamic Performance of Inclined Hovering with Asymmetric Wing Rotation. Biomimetics 2024, 9, 225. https://doi.org/10.3390/biomimetics9040225
Zheng M, Peng L, Su G, Pan T, Li Q. Experimental Investigation on Aerodynamic Performance of Inclined Hovering with Asymmetric Wing Rotation. Biomimetics. 2024; 9(4):225. https://doi.org/10.3390/biomimetics9040225
Chicago/Turabian StyleZheng, Mengzong, Liansong Peng, Guanting Su, Tianyu Pan, and Qiushi Li. 2024. "Experimental Investigation on Aerodynamic Performance of Inclined Hovering with Asymmetric Wing Rotation" Biomimetics 9, no. 4: 225. https://doi.org/10.3390/biomimetics9040225
APA StyleZheng, M., Peng, L., Su, G., Pan, T., & Li, Q. (2024). Experimental Investigation on Aerodynamic Performance of Inclined Hovering with Asymmetric Wing Rotation. Biomimetics, 9(4), 225. https://doi.org/10.3390/biomimetics9040225