
Kinematics Analysis and Gait Study of Bionic Turtle Crawling Mechanism

Abstract
1. Introduction
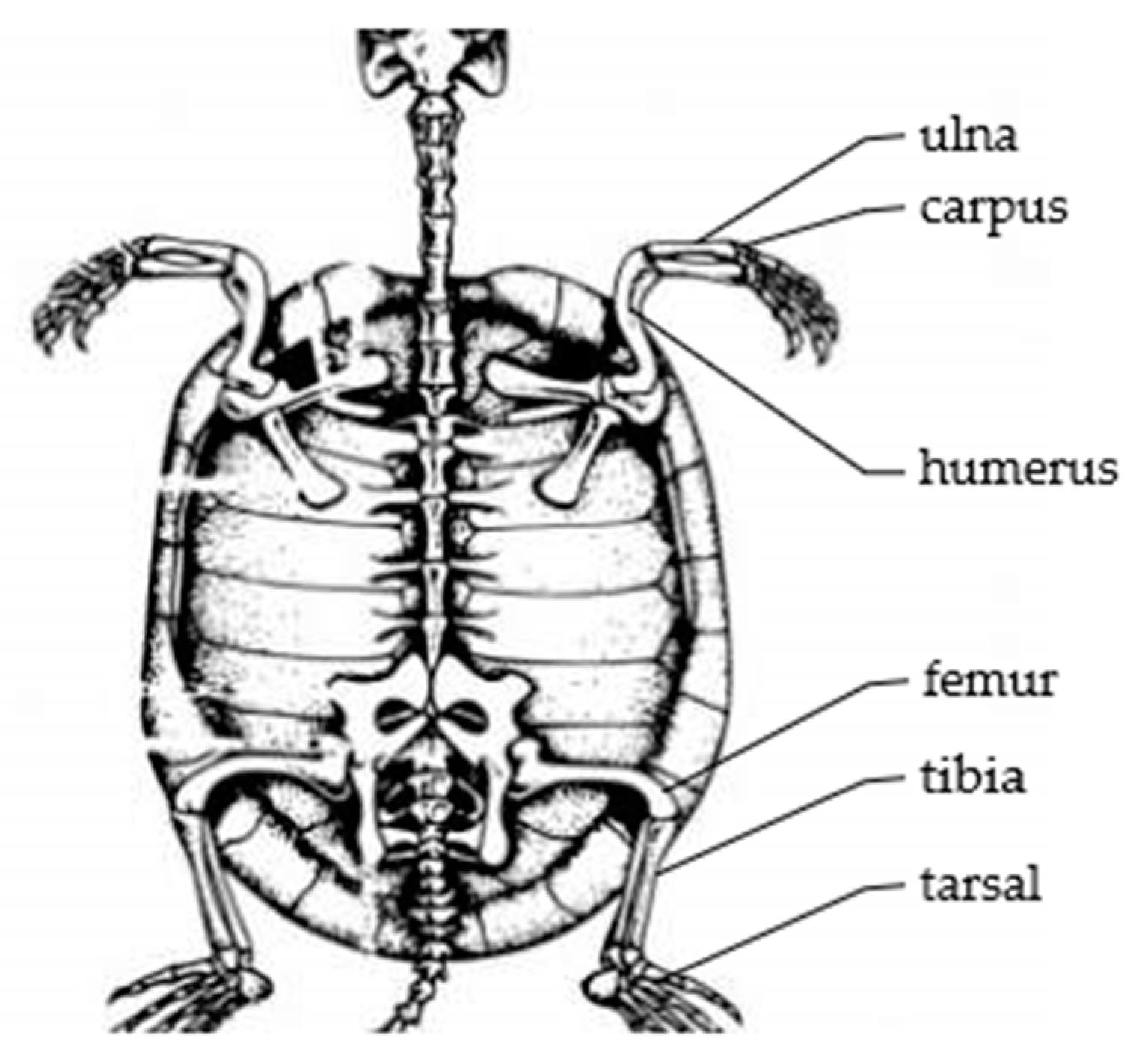
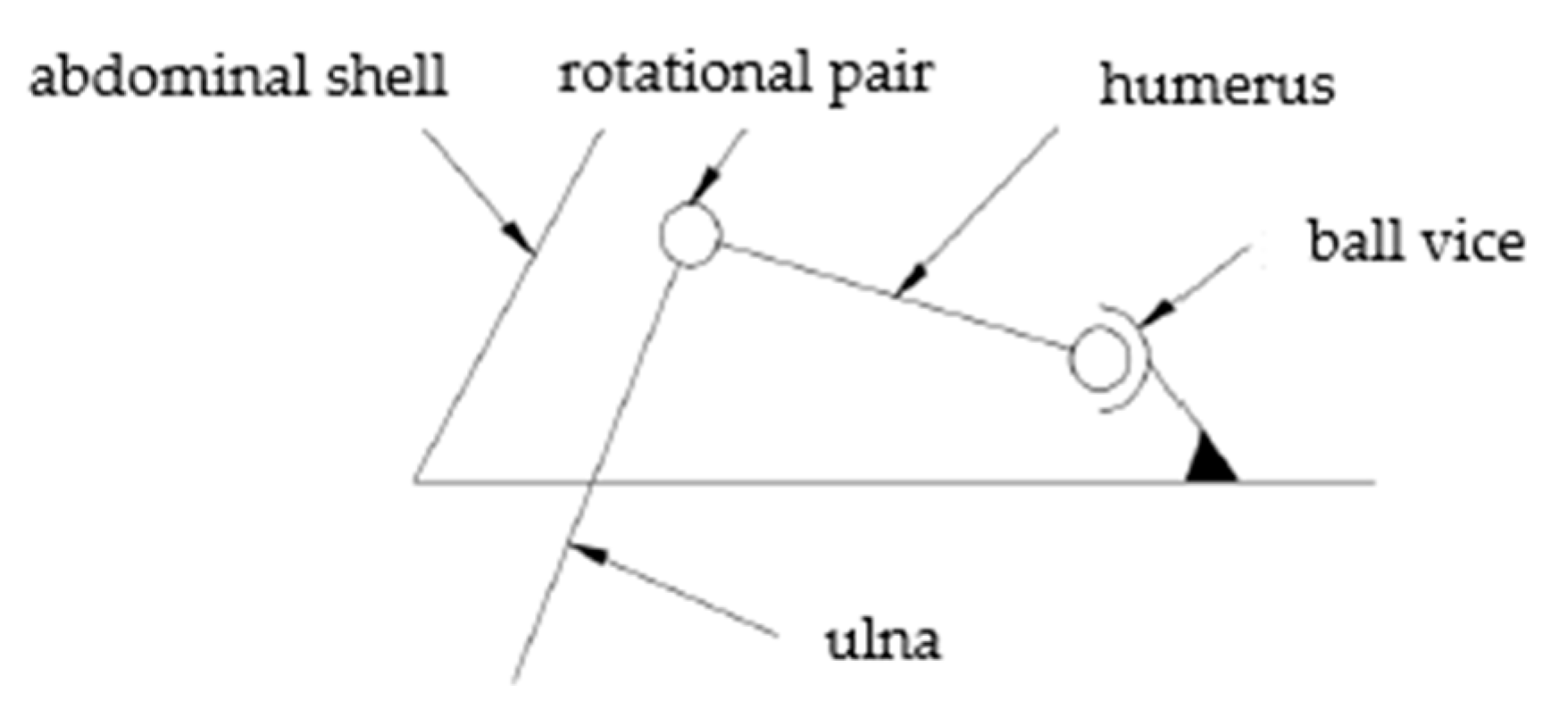
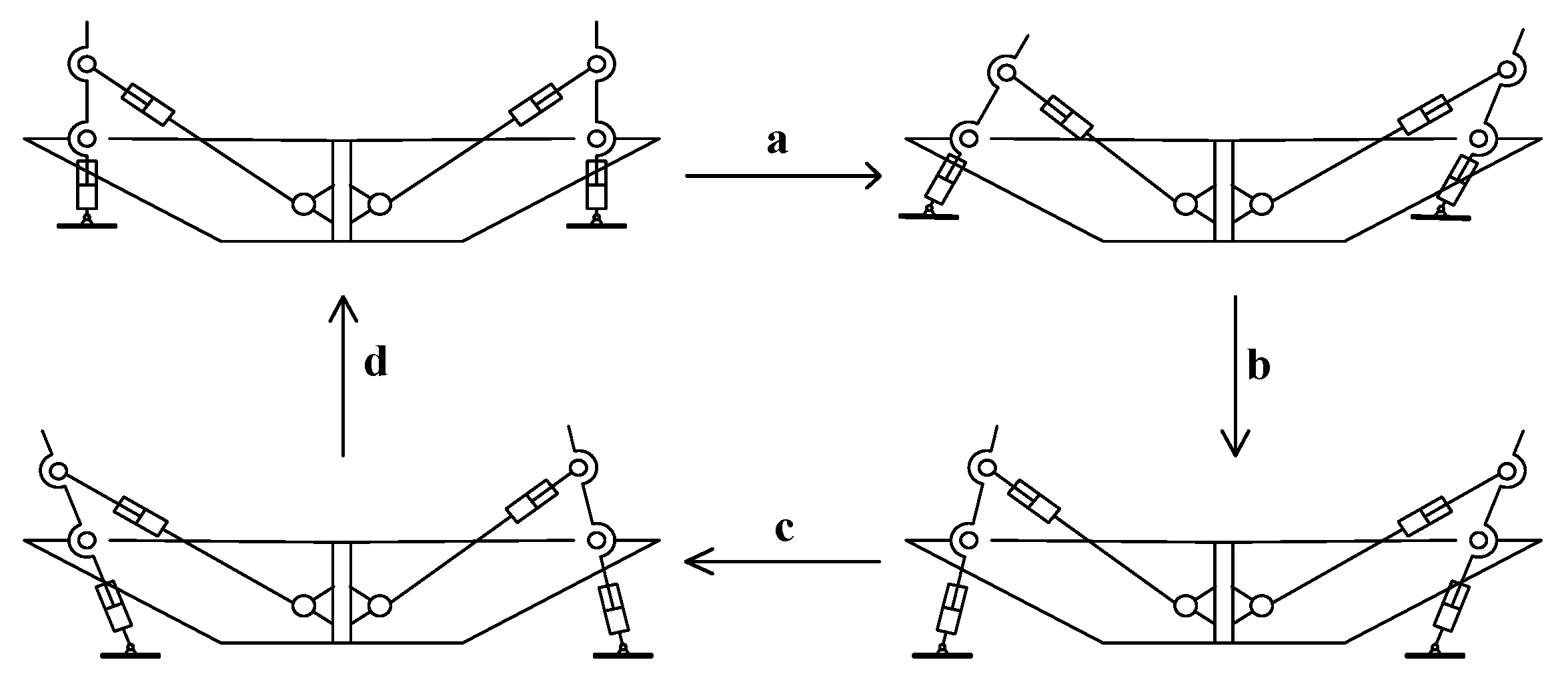
2. Overall Scheme Design
3. Kinematics and Dynamic Analysis
3.1. Forward Solution of Kinematics
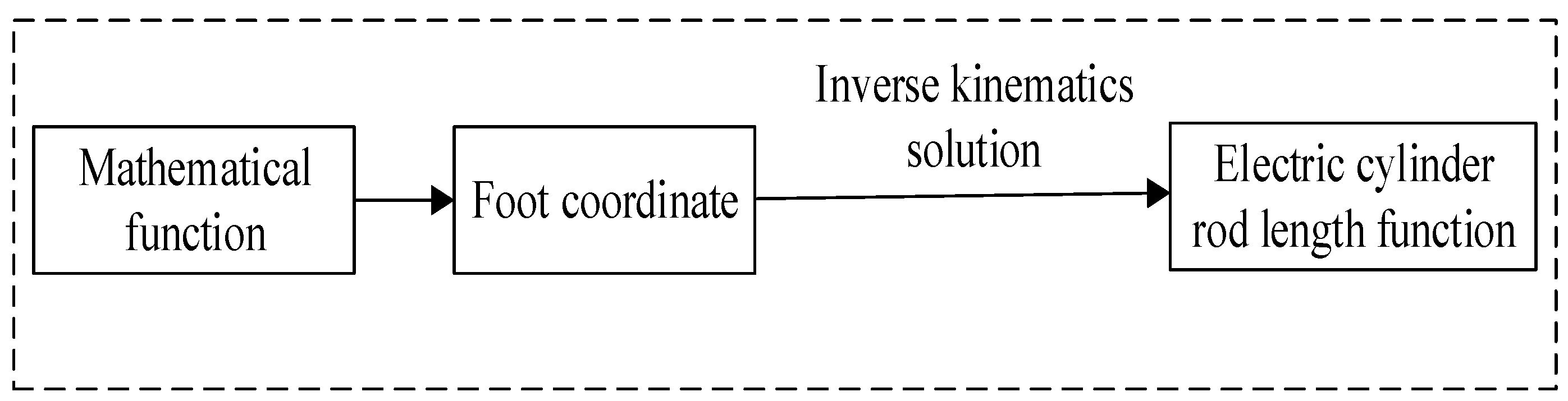
3.2. Inverse Kinematics Solution
3.3. Dynamic Analysis
4. Gait Planning and Energy Consumption Characteristics of Robot
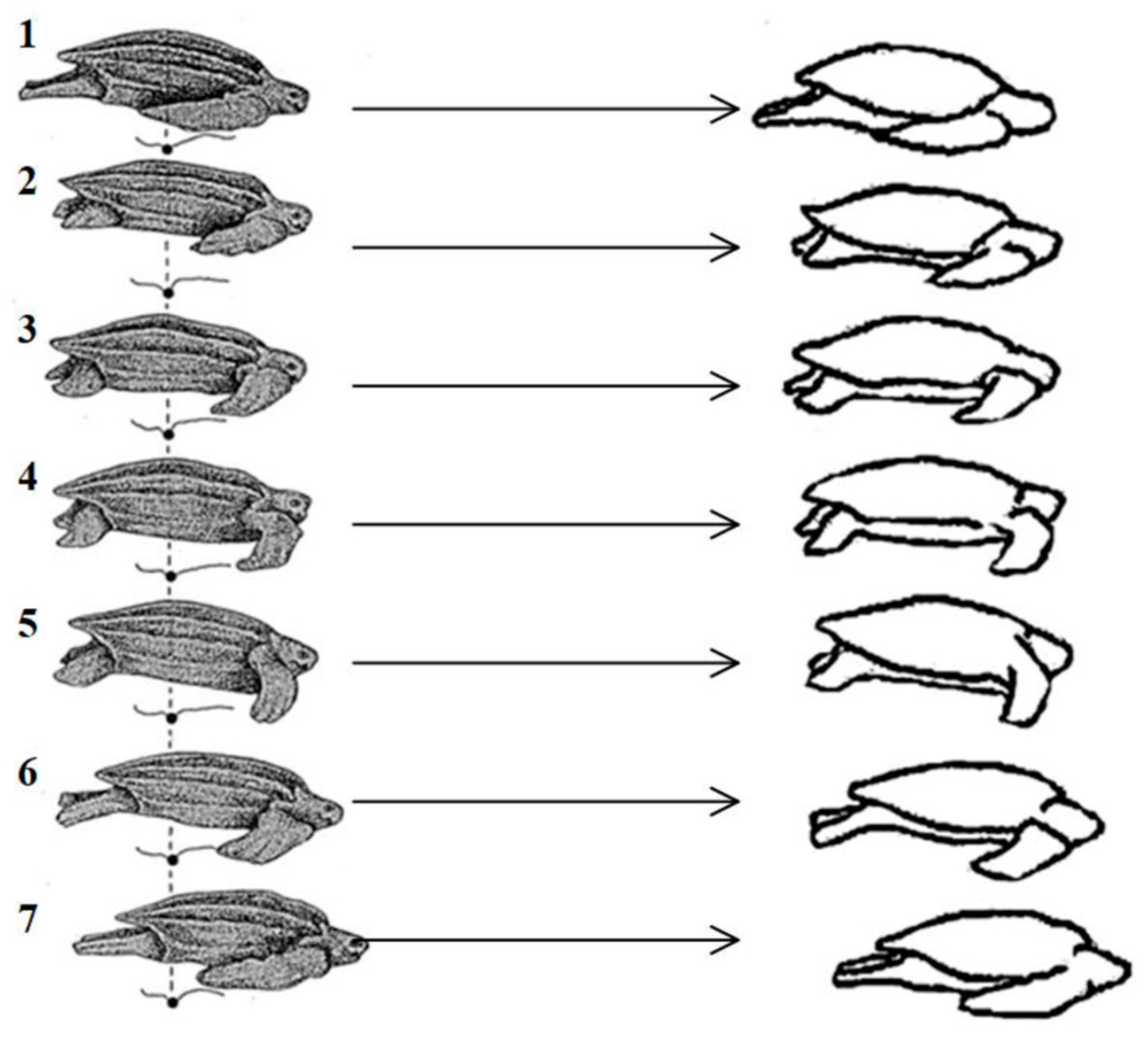
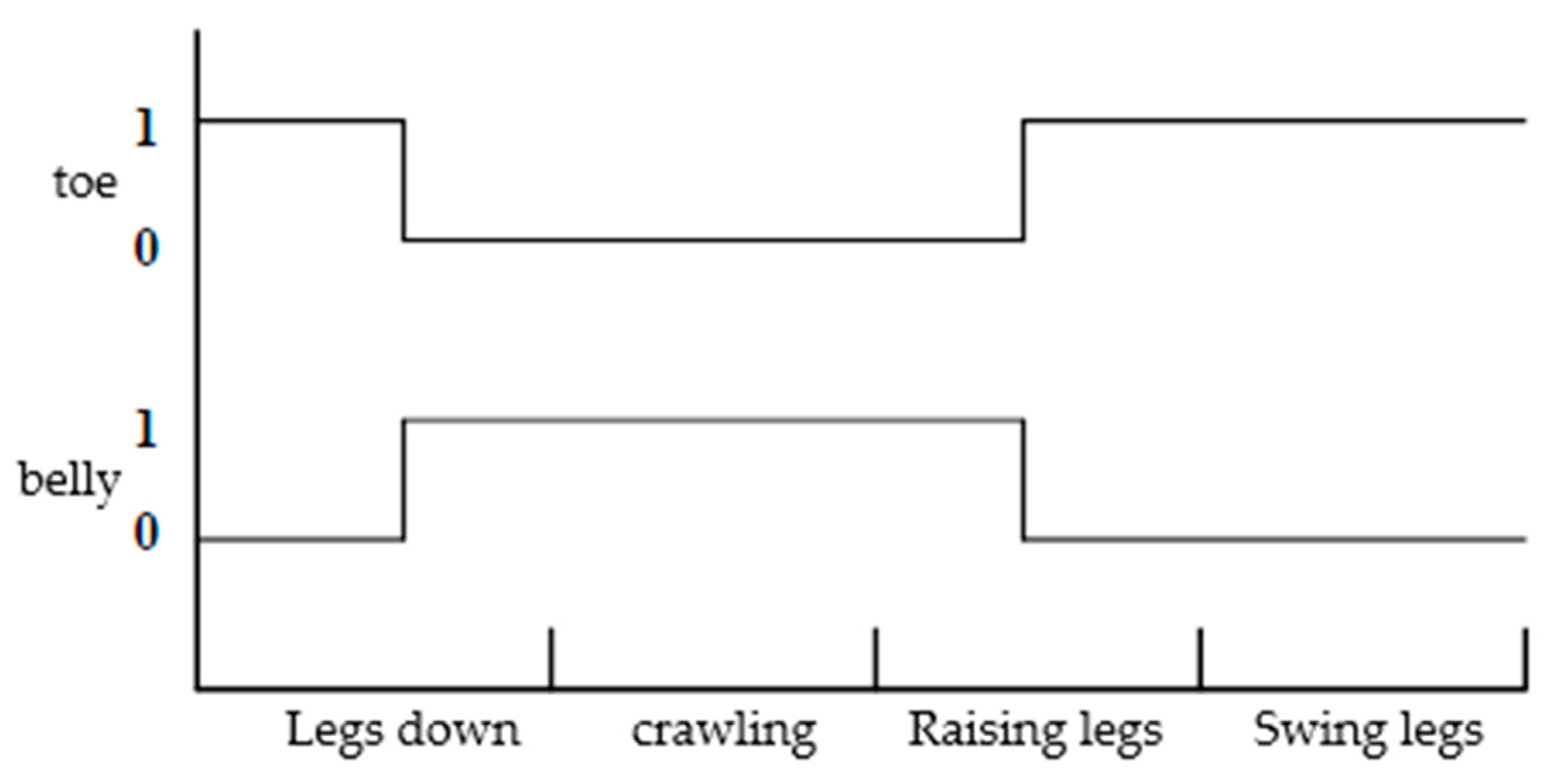
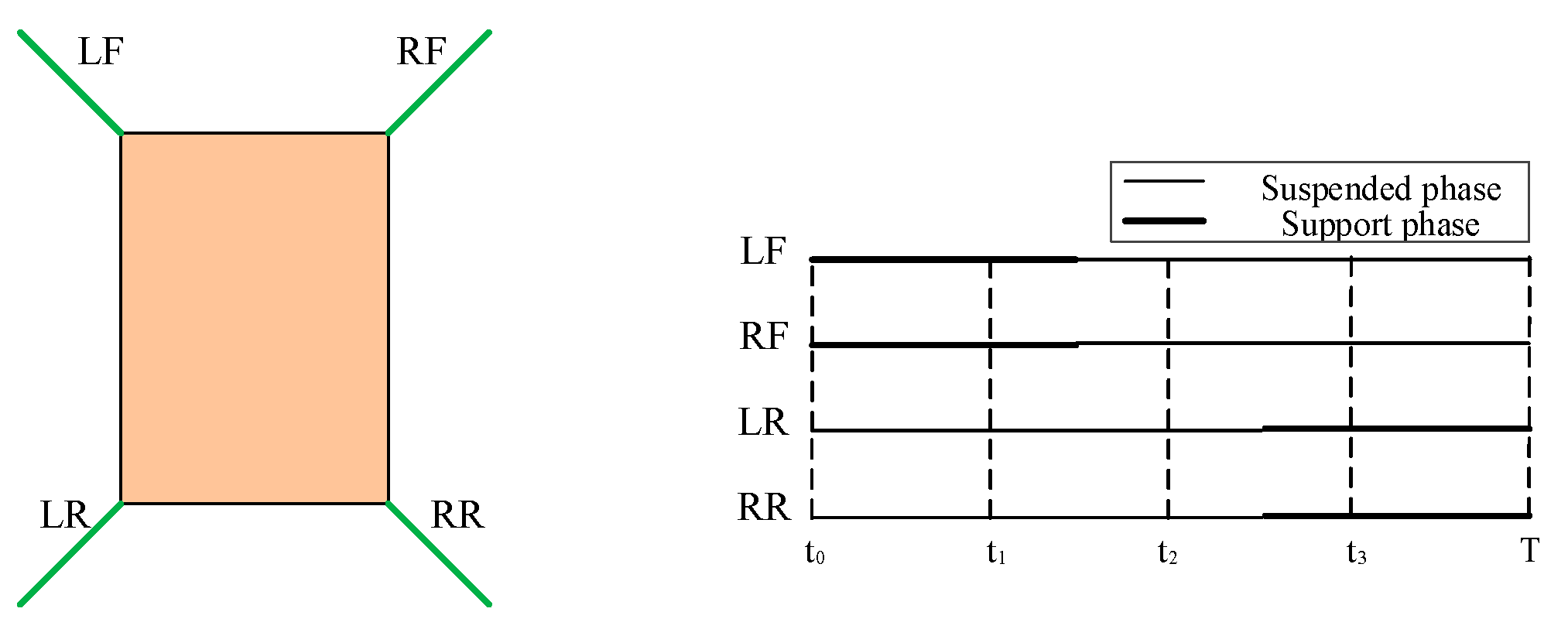
4.1. Crawling Gait of Imitation Turtle Belly
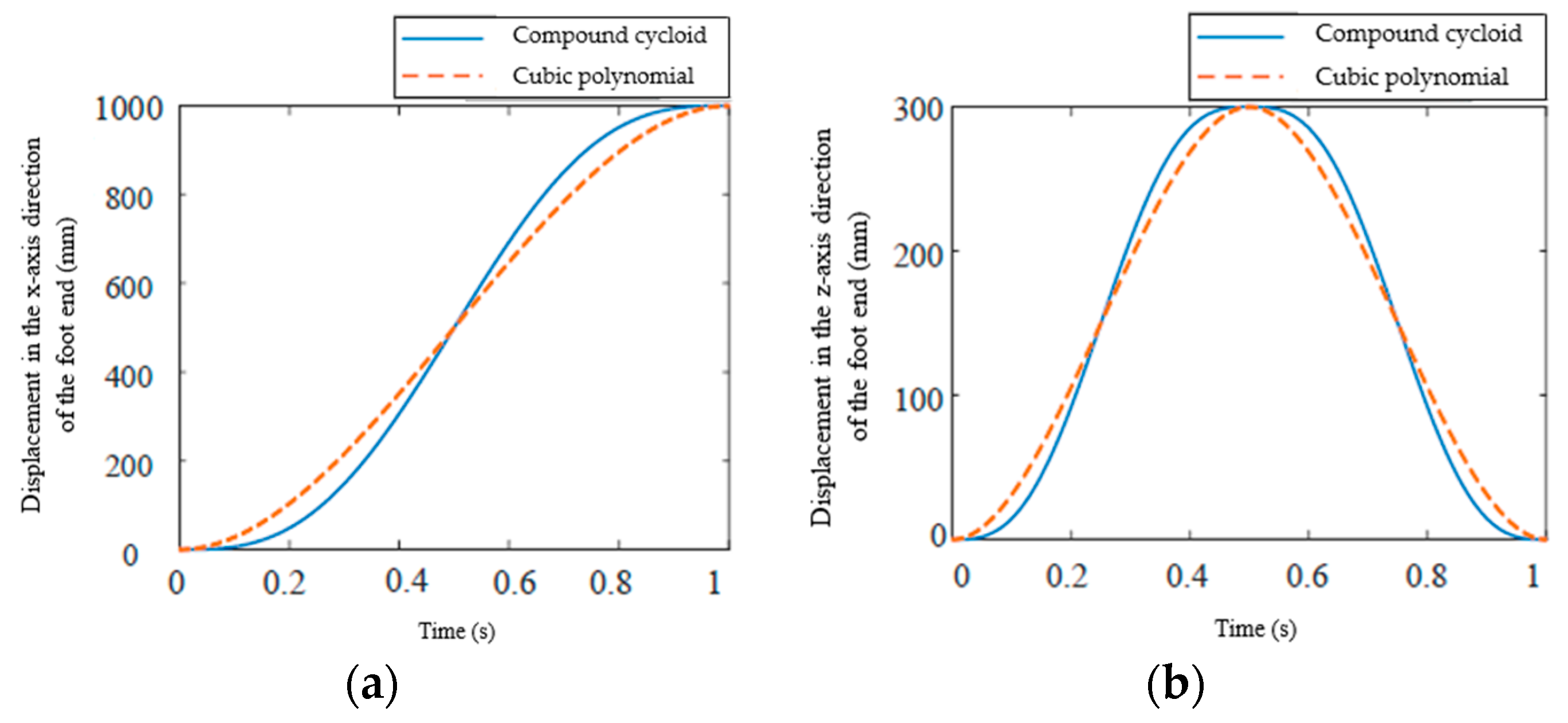
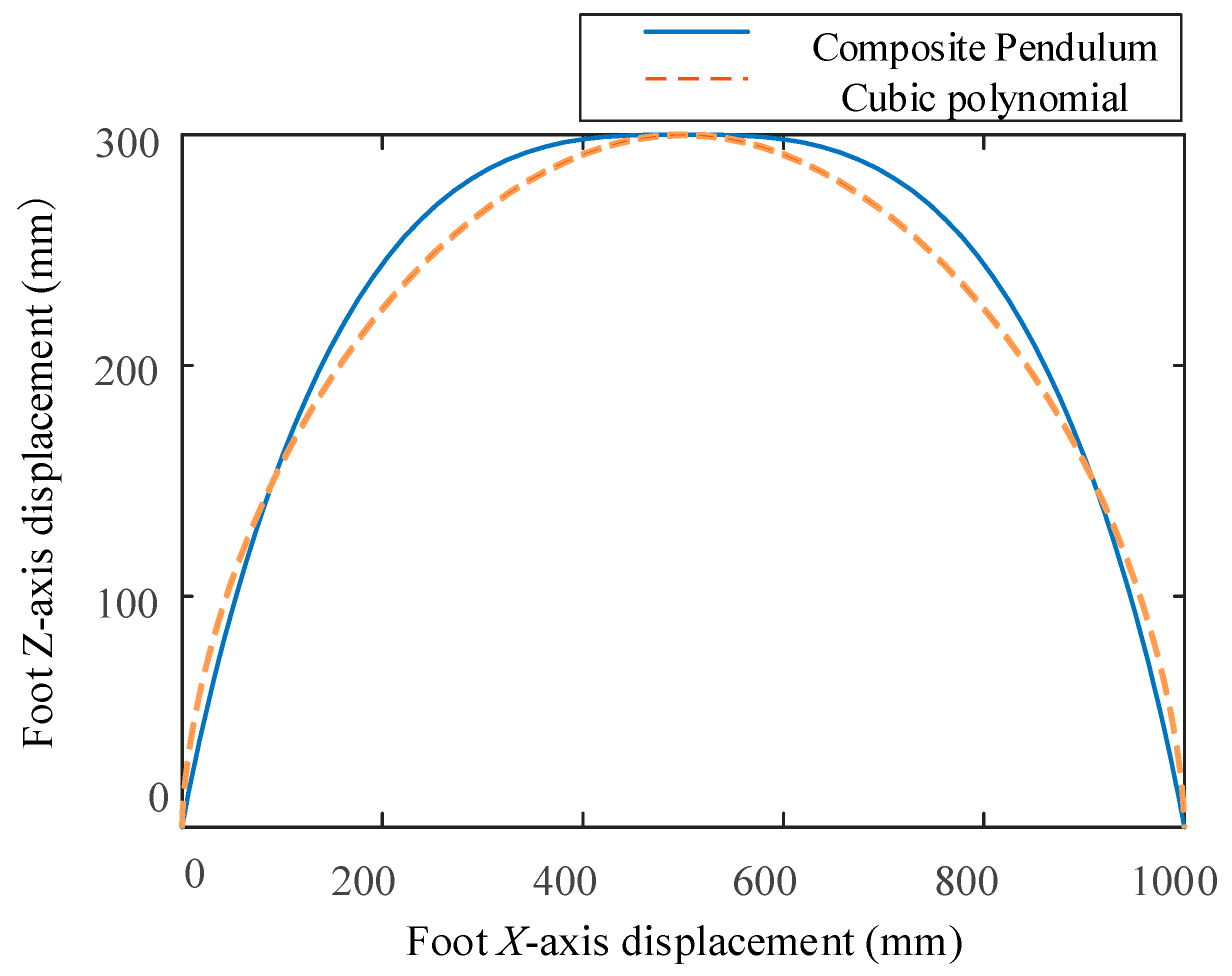
4.2. Foot Trajectory Planning
4.3. Robot Energy Consumption Model and Energy Consumption Evaluation Index
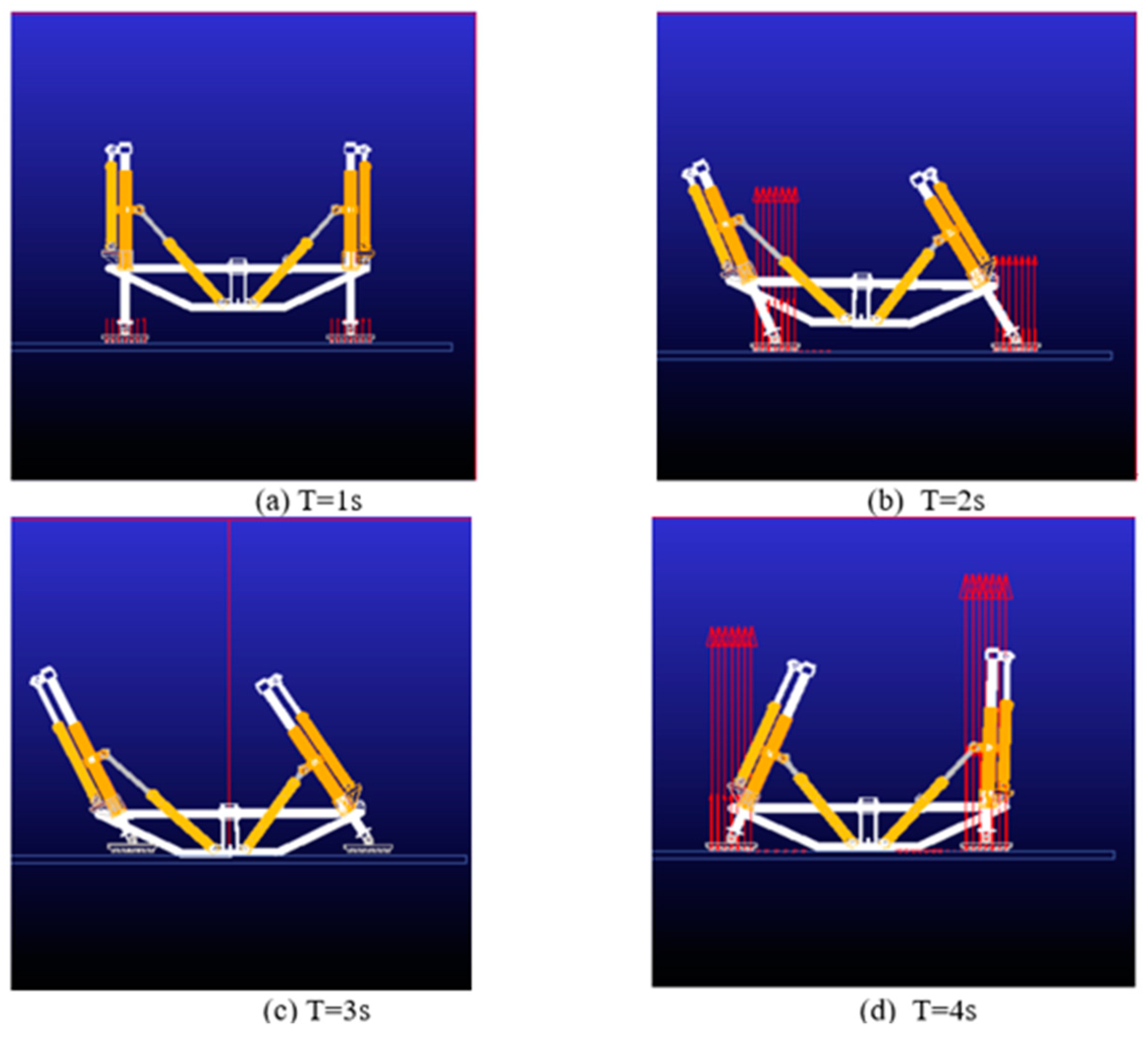
4.4. Robot Adams Simulation Experiment and Result Analysis
5. Robot Experiment
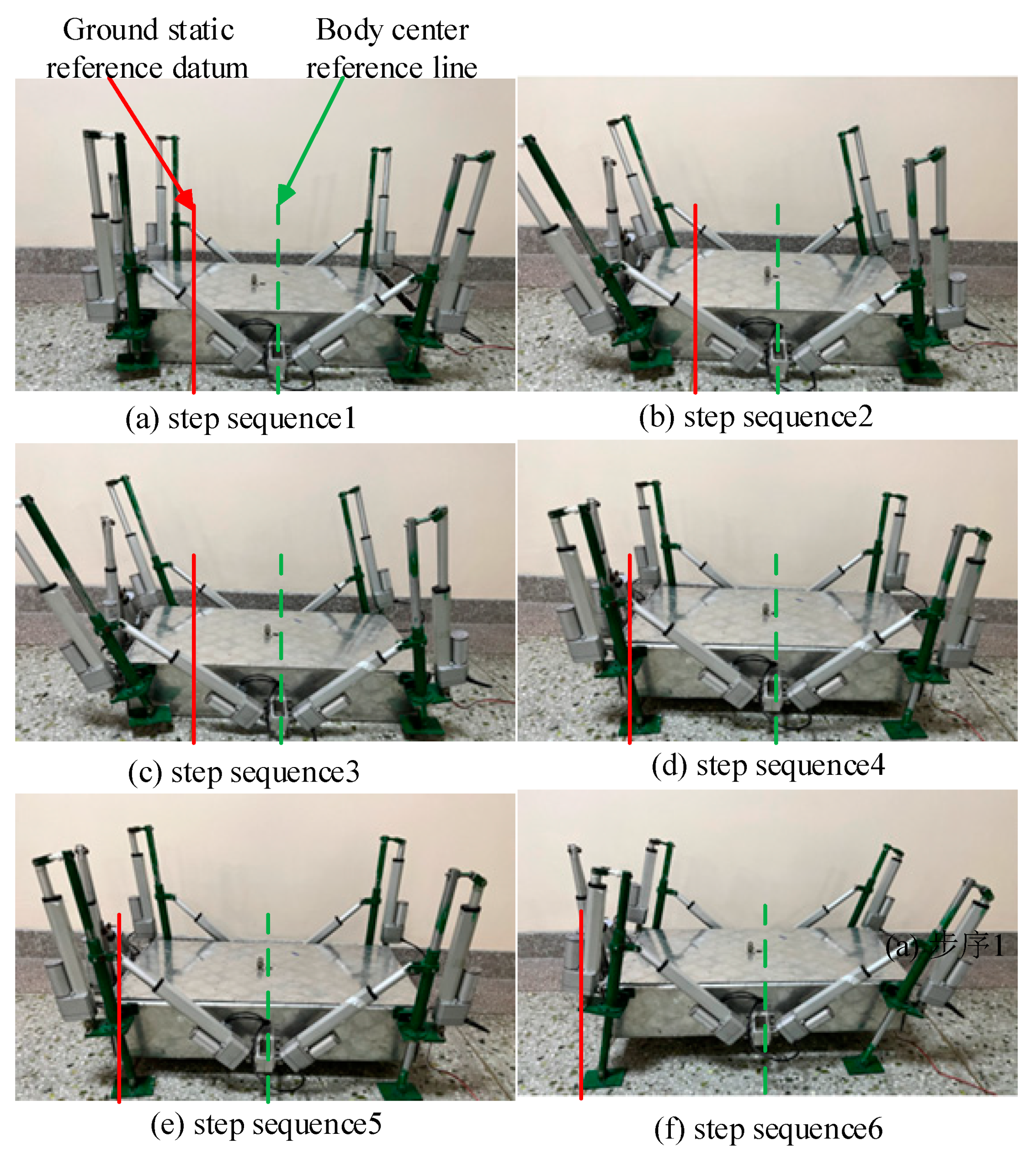
5.1. Robot Step Test
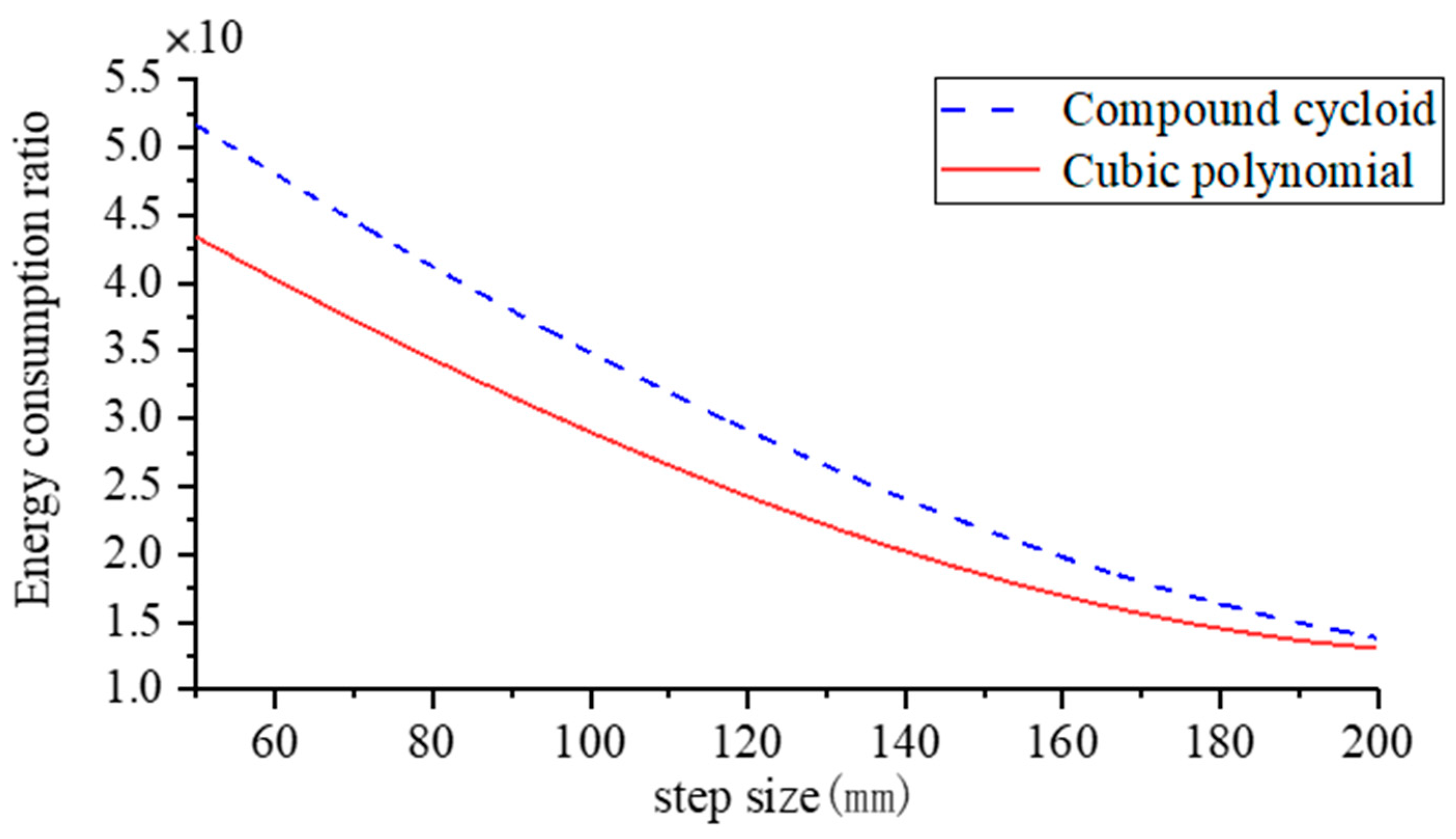
5.2. Phase Synchronization Step Size Experiment with High Parameters
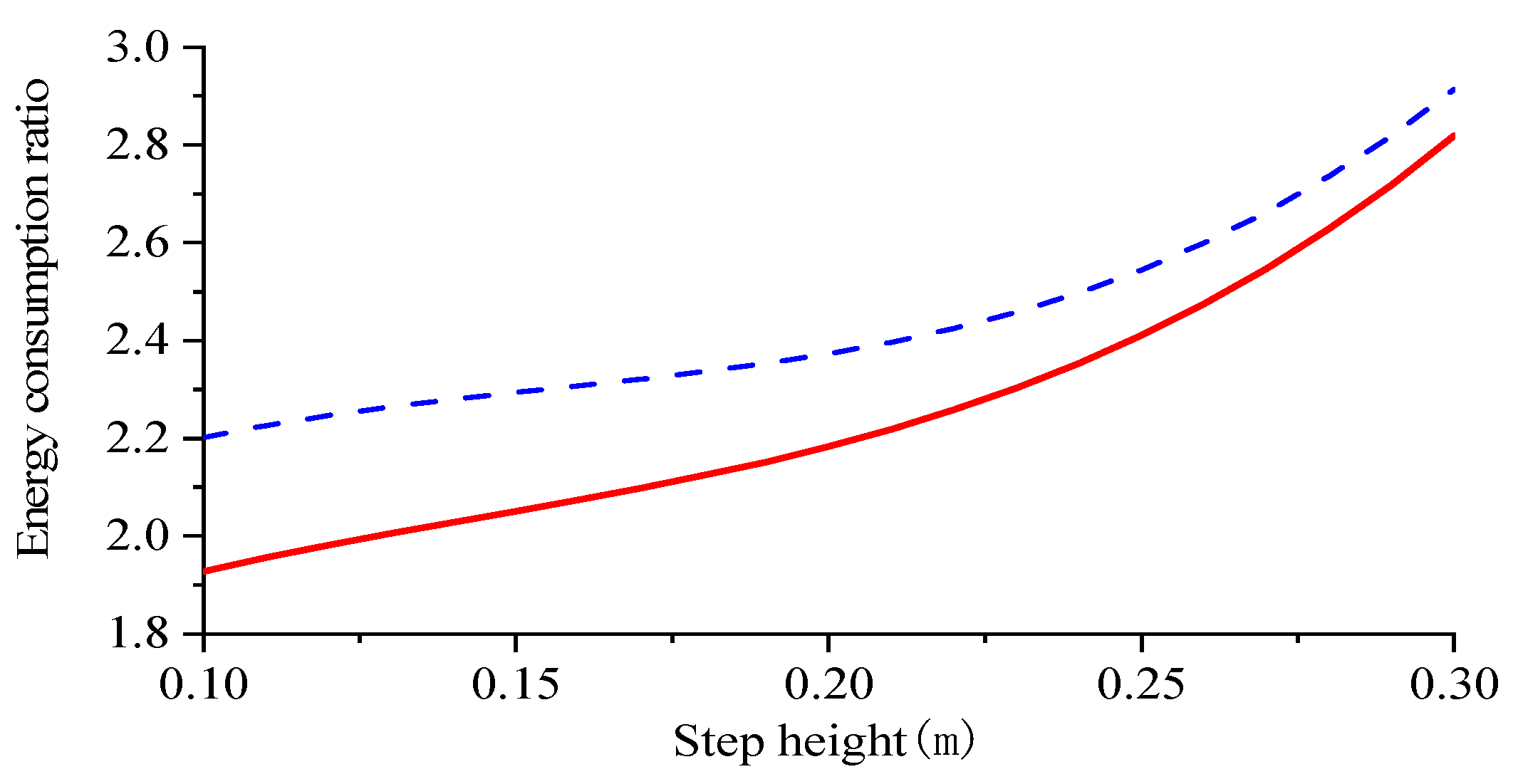
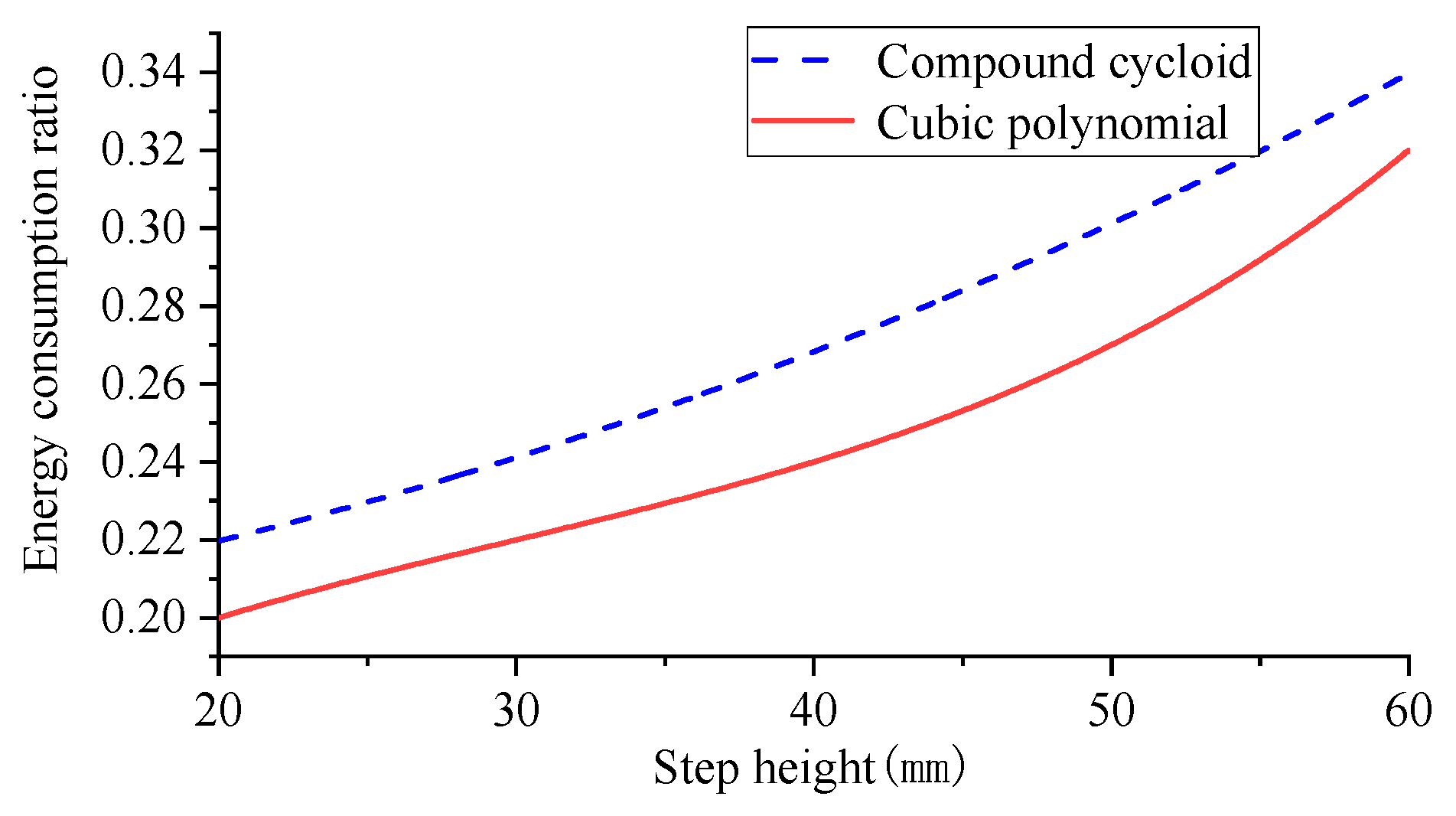
5.3. Prototype Step Height Experiment with the Same Step Parameters
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Tu, Q.; Zhang, J.; Pan, M.; Jiang, C.; Huang, H. Research progress and development trend of footed crawling robots. J. Arms Equip. Eng. 2020, 41, 1–12. [Google Scholar]
- Zhao, R. Research on Gait Planning of Quadruped Robot and Its Optimization Method. Master’s Thesis, Beijing University of Technology, Beijing, China, 2016; pp. 8–10. [Google Scholar]
- Meng, J.; Liu, J.C.; Rong, X.W.; Li, Y.B. Current status and outlook of quadrupedal robot development. Sci. Technol. Her. 2015, 33, 59–63. [Google Scholar]
- Mahdi, A.; Stephen, S.N. Foot force based reactive stability of multi-legged robots to external perturbations. J. Intell. Robot. Syst. 2016, 81, 287–300. [Google Scholar]
- Liu, J.; Tan, M.; Zhao, X. Legged robots—An overview. Trans. Inst. Meas. Control. 2007, 29, 185–202. [Google Scholar] [CrossRef]
- Koray, K.A.; Adams, G.G. Modeling and simulation of an artificial muscle and its application to biomimetic robot posture control. Robot. Auton. Syst. 2002, 41, 225–243. [Google Scholar]
- Tanaka, T.; Tetsuya, S. Development of Automated Shoreline Surveying System using Amphibious Walking Robot-The Design Concepts and the 1st Field Experiment. In Proceedings of the 23rd International Symposium on Automation and Robotics in Construction 2006, Tokyo, Japan, 3–5 October 2006; pp. 46–51. [Google Scholar]
- Tanaka, T.; Sakai, H.; Akizono, J. Design concept of a prototype amphibious walking robot for automated shore line survey work. In Proceedings of the Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No. 04CH37600), Kobe, Japan, 9–12 November 2004; IEEE: New York, NY, USA, 2004; pp. 834–839. [Google Scholar]
- Ren, K.; Yu, J.C. Research status of bionic amphibious robots: A review. Ocean. Eng. 2021, 227, 108862. [Google Scholar] [CrossRef]
- Jun, B.H.; Shim, H.; Park, J.Y.; Kim, B.; Lee, P.M. A new concept and technologies of multi-legged underwater robot for high tidal current environment. In Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologie, Tokyo, Japan, 5–8 April 2011; IEEE: New York, NY, USA, 2011; pp. 1–5. [Google Scholar]
- Jun, B.H.; Shim, H.; Kim, B.; Park, J.Y.; Baek, H.; Lee, P.M.; Kim, W.J.; Park, Y.S. Preliminary design of the multi-legged underwater walking robot CR200. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Republic of Korea, 21–24 May 2012; IEEE: New York, NY, USA, 2012; pp. 1–4. [Google Scholar]
- Low, K.H.; Chunlin, Z.; Ong, T.W.; Junzhi, Y. Modular design and initial gait study of an amphibian robotic turtle. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007; IEEE: New York, NY, USA, 2008; pp. 535–540. [Google Scholar]
- Kim, H.; Lee, J. Design, swimming motion planning and implementation of a legged underwater robot (CALEB10: D.BeeBot) by biomimetic approach. Ocean Eng. 2017, 130, 310–327. [Google Scholar] [CrossRef]
- Grezmak, J.; Graf, N.; Behr, A.; Daltorio, K. Terrain Classification Based on Sensed Leg Compliance for Amphibious Crab Robot. IEEE Sens. J. 2021, 21, 23308–23316. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L.; Hou, X.; Liu, Y.; Liu, H.; Hu, Y.; Xia, D.; Li, Z. A Novel Small-scale Turtle-inspired Amphibious Spherical Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: New York, NY, USA, 2009; pp. 1702–1707. [Google Scholar]
- Xing, H.; Liu, C.; Guo, S.; Shi, L.; Liu, W.; Li, H.; Zhao, Y. Multimodal motion study of a small amphibious turtle-like robot. Robotics 2022, 44, 212–223. [Google Scholar]
- Chai, H.; Li, Y.; Song, R.; Zhang, G.; Zhang, Q.; Liu, S.; Hou, J.; Xin, Y.; Yuan, M.; Zhang, G.; et al. A survey of the development of quadruped robots: Joint configuration, dynamic locomotion control method and mobile manipulation approach. Biomim. Intell. Robot. 2022, 2, 100029. [Google Scholar] [CrossRef]
- Chernyshev, V.V.; Pryanichnikov, V.E.; Arykantsev, V.V.; Vershinina, I.P.; Kalinin, Y.V. Research of the walking type of movement in underwater conditions. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Li, S.-X.; Chen, H.-L. Application of underwater robotic scientific research technology. Ship Eng. 2021, 43, 8–13. [Google Scholar]
- Chen, G.; Chen, J.; Jin, B.; Chen, Y. Methods to Resist Water Current Disturbances for Underwater Walking Robots. Mar. Technol. Soc. J. 2016, 50, 73–87. [Google Scholar] [CrossRef]
- Rui, H.; Li, L.; Cao, W. Gait Planning and Analysis of amphibious turtle Imitation Robot. Mech. Sci. Technol. Aerosp. Eng. 2023, 42, 46–52. [Google Scholar]
- Zhan, Q. Robotics: Mechanisms, Kinematics, Dynamics, and Motion Planning; Tsinghua University Press: Beijing, China, 2019; pp. 20–35. [Google Scholar]
- Xiong, Y.L.; Li, W.L. Robotics: Modeling, Control, and Vision; Huazhong University of Science and Technology Press: Wuhan, China, 2020; pp. 97–107. [Google Scholar]
- Huang, Y.; Jia, L.; Guo, Y.; Tao, Y.; Zheng, J. Dynamics study of rope driven quasi continuous robotic arm. Missile Space Launch Technol. 2021, 328, 81–87. [Google Scholar]
- Ding, K. Research on Biomimetic Gait Planning and Control System for Hexapod Robots. Master’s Thesis, Southeast University, Nanjing, China, 2016; pp. 1–20. [Google Scholar]
- Gong, D.; Wang, P.; Zhao, S.; Du, L.; Duan, Y. Bionic Quadruped Robot Dynamic Gait Control Strategy Based on Twenty Degrees of Freedom. IEEE/CAA J. Autom. Sin. 2018, 5, 382–388. [Google Scholar] [CrossRef]
- Wang, S.; Zong, X.; Chen, G. Research on Energy Consumption of Hydraulic 4-legged Robot Based on Diagonal Gait. J. Beijing Inst. Technol. 2016, 36, 399–404. [Google Scholar]
- Han, X.; Shang, L.; Yang, Y. Quadruped robot centroid position planning and stability analysis. Comput. Simul. 2015, 32, 308–313. [Google Scholar]
- Messuri, D.; Klein, C. Automatic body regulation for maintaining stability of a legged vehicle during rough-terrain locomotion. IEEE J. Robot. Autom. 1985, 1, 132–141. [Google Scholar] [CrossRef]
- Li, Y.; Rong, X. The Theory, Technology, and Implementation of Hydraulic Driven Quadruped Biomimetic Robots; Science Press: Beijing, China, 2018; pp. 100–110. [Google Scholar]
- Wang, M.; Sun, L.; Meng, Q. Energy analysis of bionic robot crab motion system. Mech. Des. 2005, 8, 19–21. [Google Scholar]
- Pei, F.; Cao, P.; Wan, L. Similarity theory and its application in simulation tests. Min. Technol. 2007, 28, 64–78. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
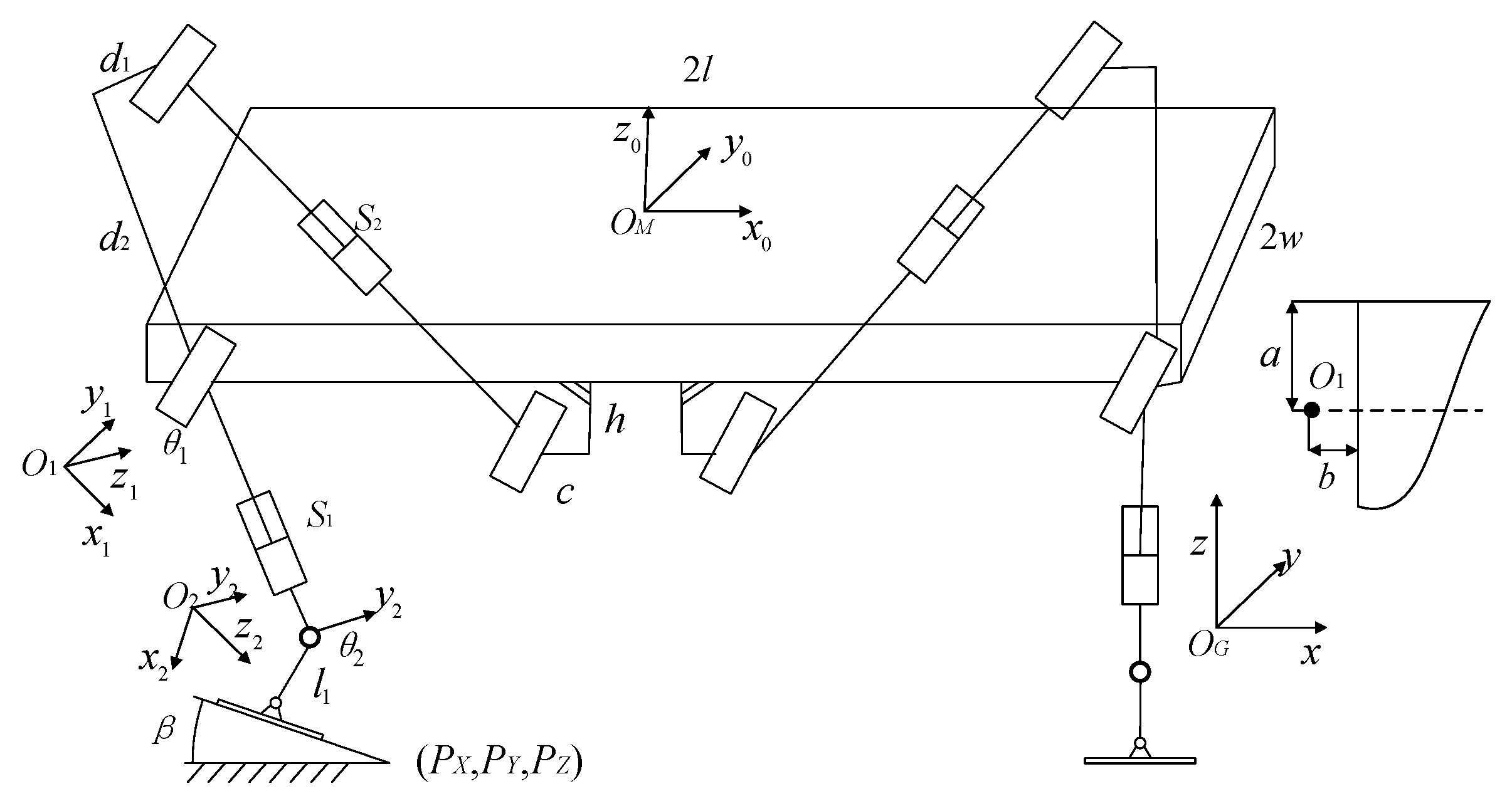
| Parameter Symbol | Parameter Meaning | Numerical Value |
|---|---|---|
| l1 | The distance between the center of the upper plantar face of the robot and the ankle joint | 60 mm |
| d1 | Vertical distance between the articulation point of the upper side of the supporting leg and the hip joint | 220 mm |
| d2 | Distance between the upper lateral articulation point and the hip joint parallel to the direction of the supporting leg | 510 mm |
| h | Distance between the hinge point of the swing leg and the plane of the body | 580 mm |
| c | The distance between the swing leg hinge point and the central cross section of the body | 100 mm |
| a | Distance from hip joint to front end of body | 150 mm |
| b | Distance from hip joint to lateral surface of body | 165 mm |
| l | 1/2 the length of the robot | 1600 mm |
| w | 1/2 the width of the robot | 700 mm |
| θ1 | Swing Angle of support leg | −0.75π~−0.25π |
| Step Parameter (mm) | Consume Energy (J) | Energy Consumption Ratio |
|---|---|---|
| 50 | 10,458 | 52.29 |
| 75 | 12,814 | 42.71 |
| 100 | 14,046 | 35.12 |
| 125 | 14,622 | 29.24 |
| 150 | 12,749 | 21.25 |
| 175 | 12,131 | 17.33 |
| 200 | 11,585 | 14.48 |
| Step Parameter (mm) | Consume Energy (J) | Energy Consumption Ratio |
|---|---|---|
| 50 | 8641 | 43.21 |
| 75 | 11,386 | 37.95 |
| 100 | 11,331 | 28.33 |
| 125 | 11,786 | 23.57 |
| 150 | 11,553 | 19.26 |
| 175 | 10,784 | 15.41 |
| 200 | 10,629 | 13.29 |
| Step Height Parameter (mm) | Consume Energy (J) | Energy Consumption Ratio |
|---|---|---|
| 20 | 8846 | 22.12 |
| 30 | 9732 | 24.33 |
| 40 | 11,041 | 27.60 |
| 50 | 12,138 | 30.34 |
| 60 | 13,763 | 34.41 |
| Step Height Parameter (mm) | Consume Energy (J) | Energy Consumption Ratio |
|---|---|---|
| 20 | 8207 | 20.52 |
| 30 | 9113 | 22.78 |
| 40 | 9681 | 24.20 |
| 50 | 10,957 | 27.39 |
| 60 | 13,104 | 32.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Peng, W.; Zhang, B. Kinematics Analysis and Gait Study of Bionic Turtle Crawling Mechanism. Biomimetics 2024, 9, 147. https://doi.org/10.3390/biomimetics9030147
Wang Z, Peng W, Zhang B. Kinematics Analysis and Gait Study of Bionic Turtle Crawling Mechanism. Biomimetics. 2024; 9(3):147. https://doi.org/10.3390/biomimetics9030147
Chicago/Turabian StyleWang, Zhuo, Wanlang Peng, and Bo Zhang. 2024. "Kinematics Analysis and Gait Study of Bionic Turtle Crawling Mechanism" Biomimetics 9, no. 3: 147. https://doi.org/10.3390/biomimetics9030147
APA StyleWang, Z., Peng, W., & Zhang, B. (2024). Kinematics Analysis and Gait Study of Bionic Turtle Crawling Mechanism. Biomimetics, 9(3), 147. https://doi.org/10.3390/biomimetics9030147