
Biomimetic Structure and Surface for Grasping Tasks


Abstract
1. Introduction
2. Wedge-Shaped Adhesive Surface
2.1. Mechanism
2.1.1. Origin
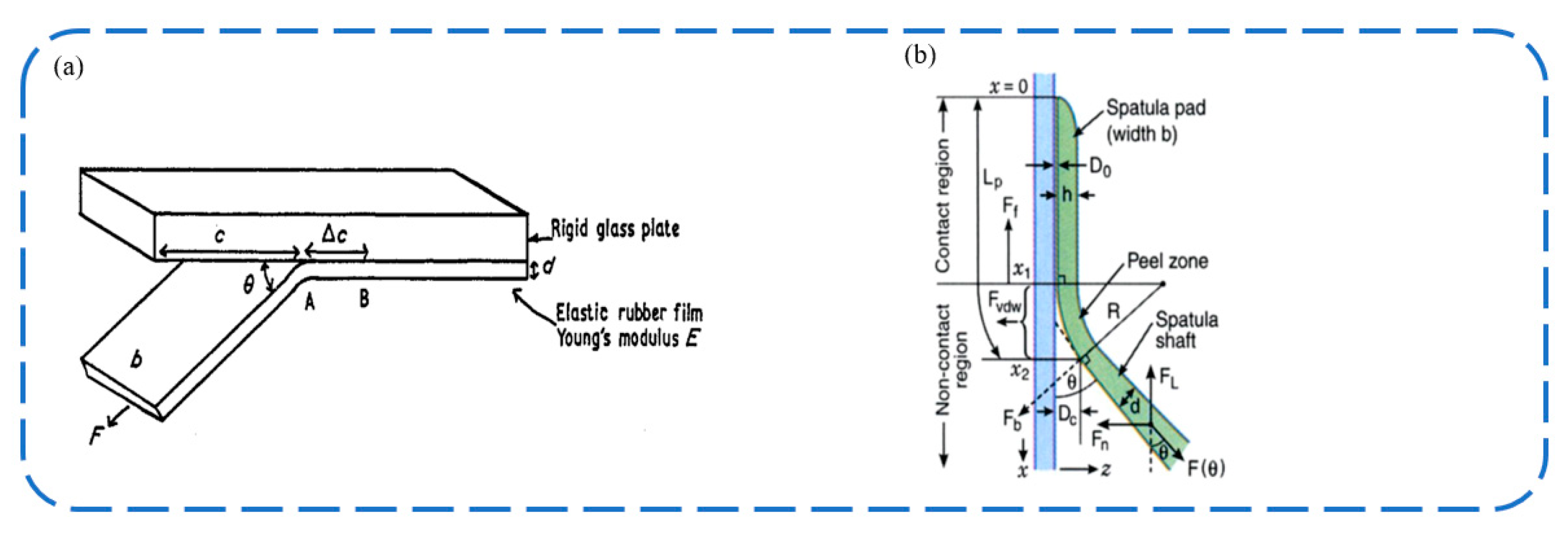
2.1.2. Kendall Peel Model
2.1.3. Peel Zone Model
2.2. Surface Capability
2.2.1. Basic Capability
2.2.2. Shape Optimization
2.3. Applications
3. The Suction Cup Surface
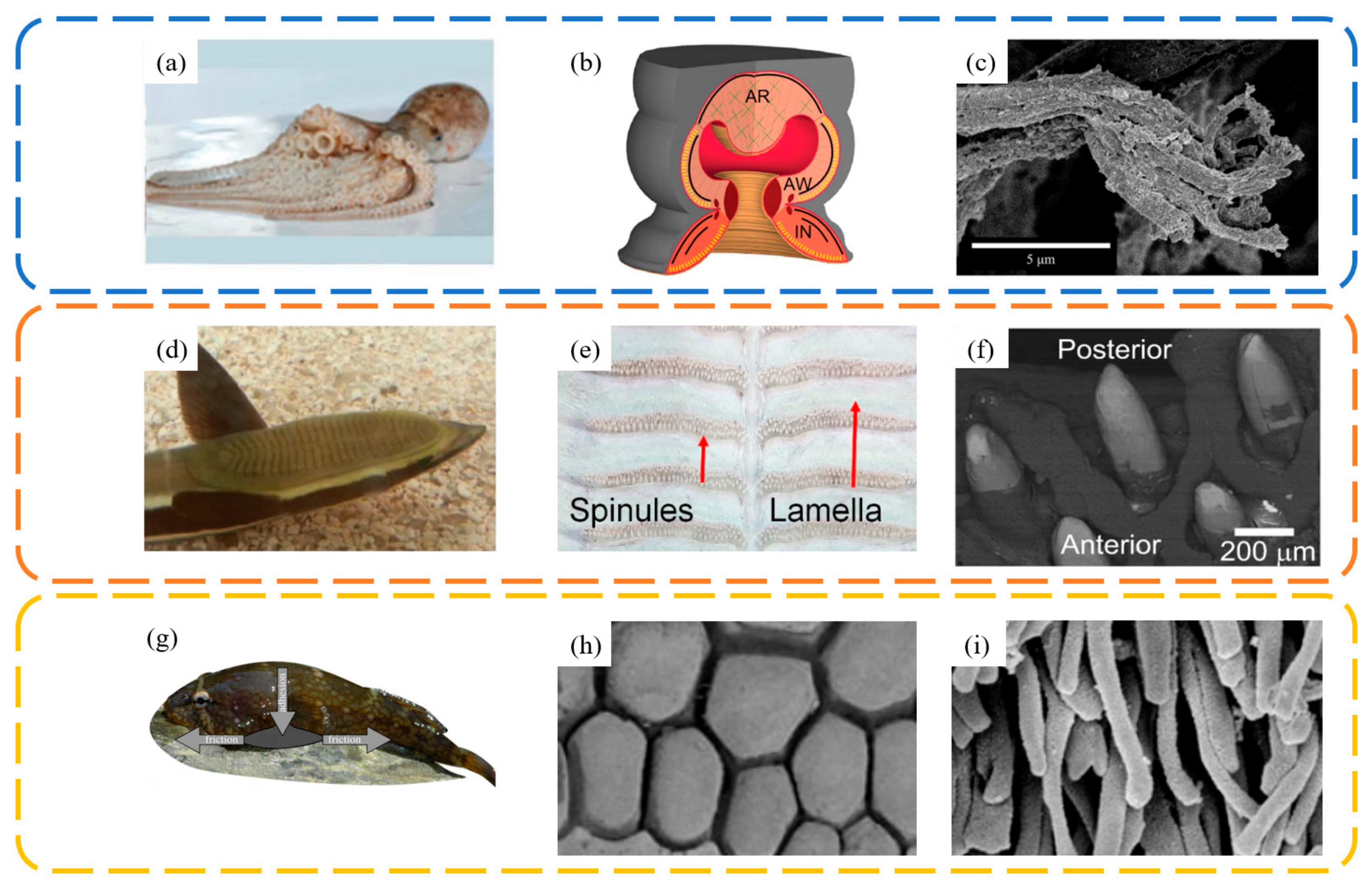
3.1. Mechanism
3.1.1. Suction Force
3.1.2. Friction Force
3.2. Manufacturing Process and Surface Capability
3.3. Applications

4. Claw Thorn Surface
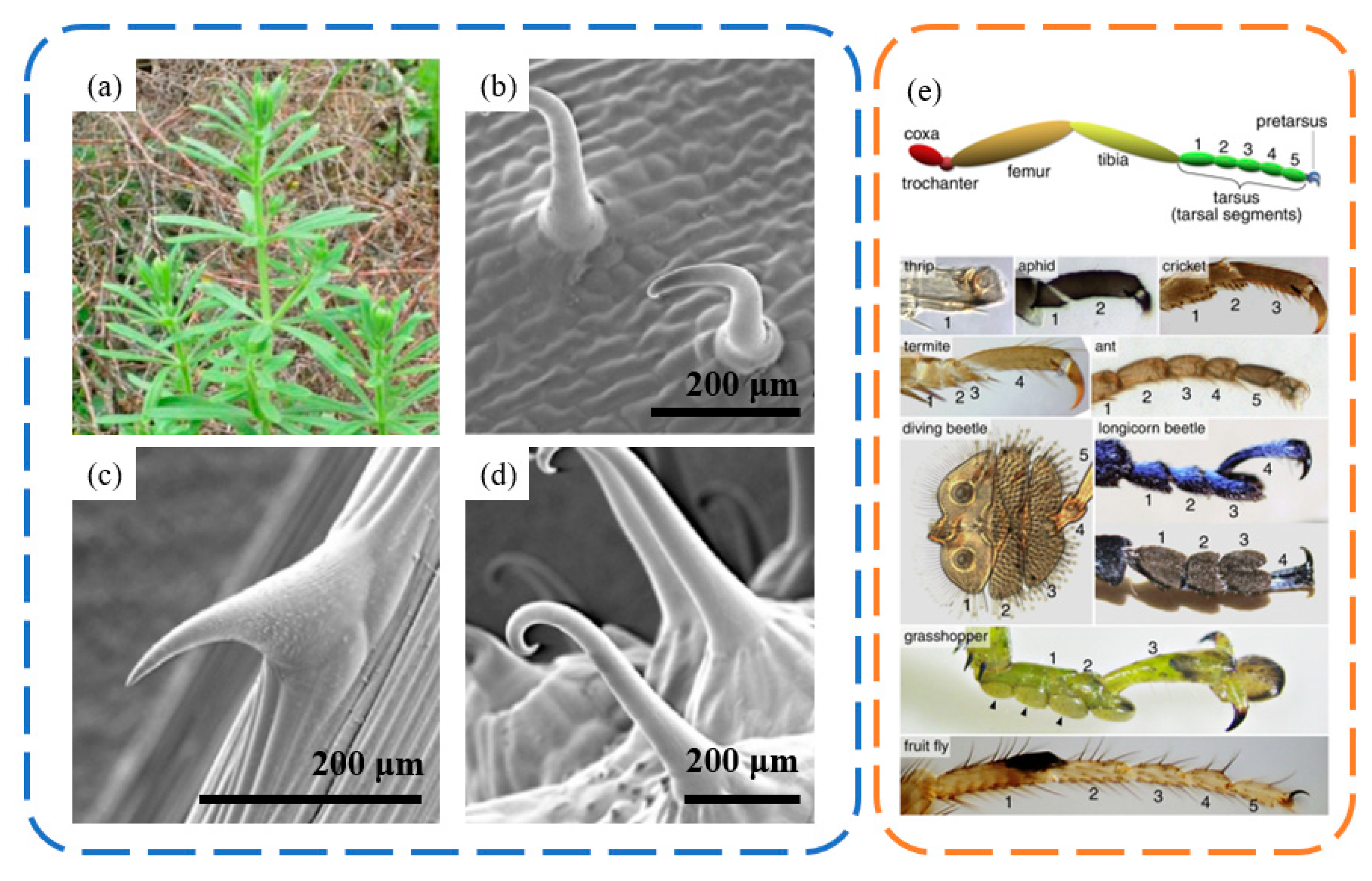
4.1. Mechanism
4.2. Applications
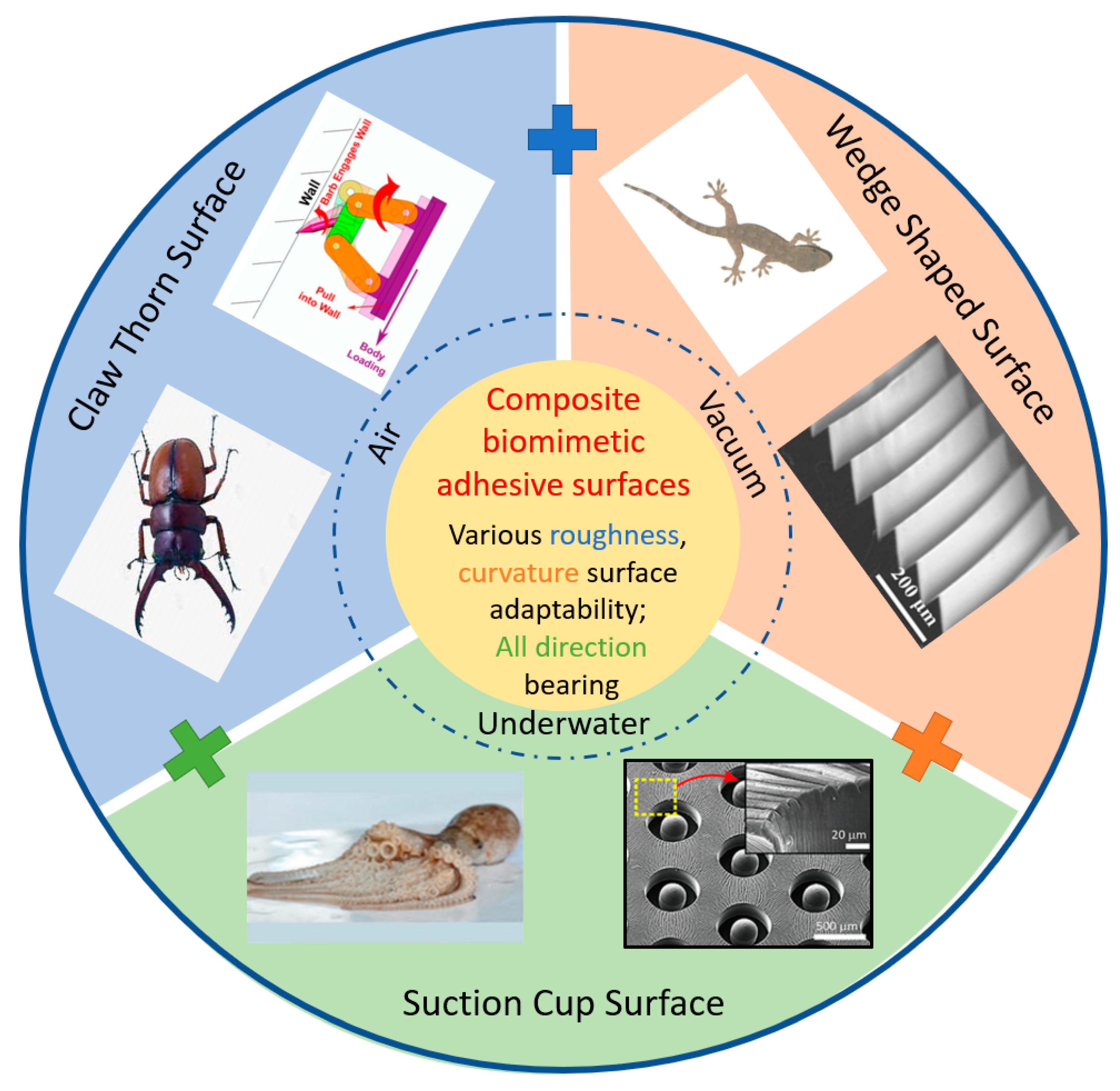
5. Composite Biomimetic Adhesive Surface

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Bioinspired | Shape | Feature Length a (μm) | Target Curvature | Target Surface Roughness | Main Loading Direction | Environment |
|---|---|---|---|---|---|---|---|
| [1,11,63,64,65,66,69,72,73,74,75,110] | Octopus | Sucker | Sucker radius: 0.1~105 | >a | <<a | Normal | Underwater/Air |
| [20,26,32,41,43,49,111,112,113,114] | Gecko | Wedge shaped | Height: 101~103 | >a | <<a | Tangential | Air/Vacuum |
| [6,80,86,87,115] | Beetle | Thorn | Tip radius: 1~103 | >a | >a | Normal/Tangential | Underwater/ Air/Vacuum |
| [104,105] | Bird | Claw | Claw length: ≈104 | ≈a | <a | Normal/Tangential | Underwater/ Air/Vacuum |
| [106,109] | Remora | Sucker + Thorn | Sucker radius: a ≈ 105 Tip radius: 1 < b < 103 | >a | <<a >b | Normal/Tangential | Underwater/Air |
6. Conclusions and Perspective
- a.
- Composite Biomimetic Adhesive Surface:
- b.
- Rapid and Robust Gripper:
- c.
- Active Perception for Dexterous Grasping:
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, Z.; Yuan, F.; Liu, J.; Tian, L.; Chen, B.; Fu, Z.; Mao, S.; Jin, T.; Wang, Y.; He, X. Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robot. 2023, 8, eadh7852. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, J.; Liu, X.; Zhang, Q.; Cong, Q.; Chen, T.; Liu, C. Advanced Bionic Attachment Equipment Inspired by the Attachment Performance of Aquatic Organisms: A Review. Biomimetics 2023, 8, 85. [Google Scholar] [CrossRef] [PubMed]
- Parness, A.; Abcouwer, N.; Fuller, C.; Wiltsie, N.; Nash, J.; Kennedy, B. LEMUR 3: A limbed climbing robot for extreme terrain mobility in space. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5467–5473. [Google Scholar]
- Smith, A.M. Cephalopod sucker design and the physical limits to negative pressure. J. Exp. Biol. 1996, 199, 949–958. [Google Scholar] [CrossRef] [PubMed]
- Tramacere, F.; Appel, E.; Mazzolai, B.; Gorb, S.N. Hairy suckers: The surface microstructure and its possible functional significance in the Octopus vulgaris sucker. Beilstein J. Nanotechnol. 2014, 5, 561–565. [Google Scholar] [CrossRef] [PubMed]
- Dai, Z.D.; Gorb, S.N.; Schwarz, U. Roughness-dependent friction force of the tarsal claw system in the beetle Pachnoda marginata (Coleoptera, Scarabaeidae). J. Exp. Biol. 2002, 205, 2479–2488. [Google Scholar] [CrossRef] [PubMed]
- Persson, B.N.J.; Gorb, S. The effect of surface roughness on the adhesion of elastic plates with application to biological systems. J. Chem. Phys. 2003, 119, 11437–11444. [Google Scholar] [CrossRef]
- Armada, M.A.; de González Santos, P.; Provancher, W.R.; Clark, J.E.; Geisler, B.; Cutkosky, M.R. Towards penetration-based clawed climbing. In Climbing and Walking Robots: Proceedings of the 7th International Conference CLAWAR 2004; Springer : Berlin/Heidelberg, Germany, 2005; pp. 961–970. [Google Scholar]
- Choi, M.K.; Park, O.K.; Choi, C.; Qiao, S.T.; Ghaffari, R.; Kim, J.; Lee, D.J.; Kim, M.; Hyun, W.; Kim, S.J.; et al. Cephalopod-Inspired Miniaturized Suction Cups for Smart Medical Skin. Adv. Healthc. Mater. 2016, 5, 80–87. [Google Scholar] [CrossRef] [PubMed]
- Pang, C.; Mak, K.; Zhang, Y.; Yang, Y.; Tse, Y.A.; Wang, M.Y. Viko: An adaptive gecko gripper with vision-based tactile sensor. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021–5 June 2021; pp. 736–742. [Google Scholar]
- Baik, S.; Lee, H.J.; Kim, D.W.; Min, H.; Pang, C. Capillarity-Enhanced Organ-Attachable Adhesive with Highly Drainable Wrinkled Octopus-Inspired Architectures. Acs Appl. Mater. Interfaces 2019, 11, 25674–25681. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.; Park, J.; Sohn, J.; Cho, D.; Jeon, S. Bioinspired, Highly Stretchable, and Conductive Dry Adhesives Based on 1D-2D Hybrid Carbon Nanocomposites for All-in-One ECG Electrodes. ACS Nano 2016, 10, 4770–4778. [Google Scholar] [CrossRef]
- Wu, J.; Ji, K.; Liu, S.; Huo, T.; Wang, X.; Tu, C.; Zhao, J.; Deng, K.; Dai, Z.; Gorb, S.N. Bio-inspired anti-slip and anti-adhesion surface with hemispherical microstructures for wafer handling. Tribol. Int. 2024, 191, 109178. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Fei, B.; Hu, H.; Lai, C.; Xin, J.H. Bioinspired, Stimuli-Responsive, Multifunctional Superhydrophobic Surface with Directional Wetting, Adhesion, and Transport of Water. Adv. Funct. Mater. 2015, 25, 5047–5056. [Google Scholar] [CrossRef]
- Linghu, C.; Wang, C.; Cen, N.; Wu, J.; Lai, Z.; Song, J. Rapidly tunable and highly reversible bio-inspired dry adhesion for transfer printing in air and a vacuum. Soft Matter 2019, 15, 30–37. [Google Scholar] [CrossRef]
- Jiang, H.; Hawkes, E.W.; Fuller, C.; Estrada, M.A.; Suresh, S.A.; Abcouwer, N.; Han, A.K.; Wang, S.Q.; Ploch, C.J.; Parness, A.; et al. A robotic device using gecko-inspired adhesives can grasp and manipulate large objects in microgravity. Sci. Robot. 2017, 2, eaan4545. [Google Scholar] [CrossRef]
- Zhou, M.; Pesika, N.; Zeng, H.B.; Tian, Y.; Israelachvili, J. Recent advances in gecko adhesion and friction mechanisms and development of gecko-inspired dry adhesive surfaces. Friction 2013, 1, 114–129. [Google Scholar] [CrossRef]
- Li, X.S.; Tao, D.S.; Lu, H.Y.; Bai, P.P.; Liu, Z.Y.; Ma, L.R.; Meng, Y.G.; Tian, Y. Recent developments in gecko-inspired dry adhesive surfaces from fabrication to application. Surf. Topogr. Metrol. Prop. 2019, 7, 023001. [Google Scholar] [CrossRef]
- Sun, W.; Neuzil, P.; Kustandi, T.S.; Oh, S.; Samper, V.D. The nature of the gecko lizard adhesive force. Biophys. J. 2005, 89, L14–L17. [Google Scholar] [CrossRef]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Natuar 2000, 405, 681–685. [Google Scholar] [CrossRef] [PubMed]
- Singla, S.; Jain, D.; Zoltowski, C.M.; Voleti, S.; Stark, A.Y.; Niewiarowski, P.H.; Dhinojwala, A. Direct evidence of acid-base interactions in gecko adhesion. Sci. Adv. 2021, 7, eabd9410. [Google Scholar] [CrossRef] [PubMed]
- Skopic, B.H.; Schniepp, H.C. Peeling in biological and bioinspired adhesive systems. JOM 2020, 72, 1509–1522. [Google Scholar] [CrossRef]
- Huber, G.; Mantz, H.; Spolenak, R.; Mecke, K.; Jacobs, K.; Gorb, S.N.; Arzt, E. Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements. Proc. Natl. Acad. Sci. USA 2005, 102, 16293–16296. [Google Scholar] [CrossRef] [PubMed]
- Kendall, K. Thin-film peeling—Elastic term. J. Phys. D-Appl. Phys. 1975, 8, 1449–1452. [Google Scholar] [CrossRef]
- Pesika, N.S.; Tian, Y.; Zhao, B.X.; Rosenberg, K.; Zeng, H.B.; McGuiggan, P.; Autumn, K.; Israelachvili, J.N. Peel-zone model of tape peeling based on the gecko adhesive system. J. Adhes. 2007, 83, 383–401. [Google Scholar] [CrossRef]
- Tian, Y.; Pesika, N.; Zeng, H.; Rosenberg, K.; Zhao, B.; McGuiggan, P.; Autumn, K.; Israelachvili, J. Adhesion and friction in gecko toe attachment and detachment. Proc. Natl. Acad. Sci. USA 2006, 103, 19320–19325. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Tian, Y.; Pesika, N.; Zeng, H.; Wan, J.; Meng, Y.; Wen, S. The extended peel zone model: Effect of peeling velocity. J. Adhes. 2011, 87, 1045–1058. [Google Scholar] [CrossRef]
- Li, Y.; Pesika, N.S.; Zhou, M.; Tian, Y. Spring Contact Model of Tape Peeling: A Combination of the Peel-Zone Approach and the Kendall Approach. Front. Mech. Eng. 2018, 4, 22. [Google Scholar] [CrossRef]
- He, L.; Lou, J.; Kitipornchai, S.; Yang, J.; Du, J. Peeling mechanics of hyperelastic beams: Bending effect. Int. J. Solids Struct. 2019, 167, 184–191. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Recent advances in the fabrication and adhesion testing of biomimetic dry adhesives. Smart Mater. Struct. 2010, 19, 103001. [Google Scholar] [CrossRef]
- Parness, A.; Soto, D.; Esparza, N.; Gravish, N.; Wilkinson, M.; Autumn, K.; Cutkosky, M. A microfabricated wedge-shaped adhesive array displaying gecko-like dynamic adhesion, directionality and long lifetime. J. R. Soc. Interface 2009, 6, 1223–1232. [Google Scholar] [CrossRef] [PubMed]
- Tao, D.S.; Gao, X.; Lu, H.Y.; Liu, Z.Y.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.G.; Tian, Y. Controllable Anisotropic Dry Adhesion in Vacuum: Gecko Inspired Wedged Surface Fabricated with Ultraprecision Diamond Cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Son, D.; Liimatainen, V.; Sitti, M. Machine Learning-Based and Experimentally Validated Optimal Adhesive Fibril Designs. Small 2021, 17, 2102867. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Y.; Hensel, R.; Arzt, E. A design strategy for mushroom-shaped microfibrils with optimized dry adhesion: Experiments and finite element analyses. J. Appl. Mech. 2021, 88, 031015. [Google Scholar] [CrossRef]
- Kim, Y.; Yang, C.; Kim, Y.; Gu, G.X.; Ryu, S. Designing an adhesive pillar shape with deep learning-based optimization. ACS Appl. Mater. Interfaces 2020, 12, 24458–24465. [Google Scholar] [CrossRef] [PubMed]
- Aksak, B.; Sahin, K.; Sitti, M. The optimal shape of elastomer mushroom-like fibers for high and robust adhesion. Beilstein J. Nanotechnol. 2014, 5, 630–638. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Yeo, J.; Park, K.; Destrée, A.; Qin, Z.; Ryu, S. Designing directional adhesive pillars using deep learning-based optimization, 3D printing, and testing. Mech. Mater. 2023, 185, 104778. [Google Scholar] [CrossRef]
- Gwon, M.; Park, G.; Hong, D.; Park, Y.-J.; Han, S.; Kang, D.; Koh, J.-s. Soft directional adhesion gripper fabricated by 3D printing process for gripping flexible printed circuit boards. Int. J. Precis. Eng. Manuf. Green. Technol. 2022, 9, 1151–1163. [Google Scholar] [CrossRef]
- Kwak, M.K.; Jeong, H.E.; Bae, W.G.; Jung, H.S.; Suh, K.Y. Anisotropic adhesion properties of triangular-tip-shaped micropillars. Small 2011, 7, 2296–2300. [Google Scholar] [CrossRef] [PubMed]
- del Campo, A.; Greiner, C.; Arzt, E. Contact shape controls adhesion of bioinspired fibrillar surfaces. Langmuir 2007, 23, 10235–10243. [Google Scholar] [CrossRef]
- Jin, K.; Cremaldi, J.C.; Erickson, J.S.; Tian, Y.; Israelachvili, J.N.; Pesika, N.S. Biomimetic bidirectional switchable adhesive inspired by the gecko. Adv. Funct. Mater. 2014, 24, 574–579. [Google Scholar] [CrossRef]
- Pang, C.; Wang, Q.; Mak, K.; Yu, H.; Wang, M.Y. Viko 2.0: A hierarchical gecko-inspired adhesive gripper with visuotactile sensor. IEEE Robot. Autom. Lett. 2022, 7, 7842–7849. [Google Scholar] [CrossRef]
- Ruotolo, W.; Brouwer, D.; Cutkosky, M.R. From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper. Sci. Robot. 2021, 6, eabi9773. [Google Scholar] [CrossRef]
- Alizadehyazdi, V.; Bonthron, M.; Spenko, M. An electrostatic/gecko-inspired adhesives soft robotic gripper. IEEE Robot. Autom. Lett. 2020, 5, 4679–4686. [Google Scholar] [CrossRef]
- Roberge, J.-P.; Ruotolo, W.; Duchaine, V.; Cutkosky, M. Improving industrial grippers with adhesion-controlled friction. IEEE Robot. Autom. Lett. 2018, 3, 1041–1048. [Google Scholar] [CrossRef]
- Estrada, M.A.; Hockman, B.; Bylard, A.; Hawkes, E.W.; Cutkosky, M.R.; Pavone, M. Free-flyer acquisition of spinning objects with gecko-inspired adhesives. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4907–4913. [Google Scholar]
- Hawkes, E.W.; Jiang, H.; Cutkosky, M.R. Three-dimensional dynamic surface grasping with dry adhesion. Int. J. Robot. Res. 2016, 35, 943–958. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. A shape memory alloy-actuated gecko-inspired robotic gripper. Sens. Actuators A Phys. 2018, 276, 76–82. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. Development of a gecko-like robotic gripper using Scott–Russell mechanisms. Robotica 2020, 38, 541–549. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Jiang, H.; Christensen, D.L.; Han, A.K.; Cutkosky, M.R. Grasping without squeezing: Design and modeling of shear-activated grippers. IEEE Trans. Robot. 2017, 34, 303–316. [Google Scholar] [CrossRef]
- Bogue, R. Climbing robots: Recent research and emerging applications. Ind. Robot Int. J. Robot. Res. Appl. 2019, 46, 721–727. [Google Scholar] [CrossRef]
- Sameoto, D.; Khungura, H.; Benvidi, F.H.; Asad, A.; Liang, T.; Bacca, M. Space applications for gecko-inspired adhesives. In Biomimicry for Aerospace; Elsevier: Amsterdam, The Netherlands, 2022; pp. 423–458. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Henrey, M.; Téllez, J.P.D.; Wormnes, K.; Pambaguian, L.; Menon, C. Towards the use of mushroom-capped dry adhesives in outer space: Effects of low pressure and temperature on adhesion strength. Aerosp. Sci. Technol. 2013, 29, 185–190. [Google Scholar] [CrossRef]
- Chen, Y.P.; Meng, J.X.; Gu, Z.; Wan, X.Z.; Jiang, L.; Wang, S.T. Bioinspired Multiscale Wet Adhesive Surfaces: Structures and Controlled Adhesion. Adv. Funct. Mater. 2020, 30, 1905287. [Google Scholar] [CrossRef]
- Tramacere, F.; Beccai, L.; Kuba, M.; Gozzi, A.; Bifone, A.; Mazzolai, B. The Morphology and Adhesion Mechanism of Octopus vulgaris Suckers. PLoS ONE 2013, 8, e65074. [Google Scholar] [CrossRef] [PubMed]
- Culler, M.; Ledford, K.A.; Nadler, J.H. The role of topology and tissue mechanics in remora attachment. MRS Online Proc. Libr. 2014, 1648, mrsf13-1648-hh1610-1602. [Google Scholar] [CrossRef]
- Beckert, M.; Flammang, B.E.; Nadler, J.H. Remora fish suction pad attachment is enhanced by spinule friction. J. Exp. Biol. 2015, 218, 3551–3558. [Google Scholar] [CrossRef]
- Wainwright, D.K.; Kleinteich, T.; Kleinteich, A.; Gorb, S.N.; Summers, A.P. Stick tight: Suction adhesion on irregular surfaces in the northern clingfish. Biol. Lett. 2013, 9, 20130234. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, Y.; Liu, S.; Liu, J. Insights into adhesion of abalone: A mechanical approach. J. Mech. Behav. Biomed. Mater. 2018, 77, 331–336. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Ma, C.; Liu, J.; Dong, X.; Liu, J. The co-effect of microstructures and mucus on the adhesion of abalone from a mechanical perspective. Biosurface Biotribology 2021, 7, 180–186. [Google Scholar] [CrossRef]
- Tramacere, F.; Beccai, L.; Mattioli, F.; Sinibaldi, E.; Mazzolai, B. Artificial Adhesion Mechanisms inspired by Octopus Suckers. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St Paul, MN, USA, 14–18 May 2012; pp. 3846–3851. [Google Scholar]
- Chen, Y.C.; Yang, H.T. Octopus-Inspired Assembly of Nanosucker Arrays for Dry/Wet Adhesion. Acs Nano 2017, 11, 5332–5338. [Google Scholar] [CrossRef]
- Baik, S.; Kim, J.; Lee, H.J.; Lee, T.H.; Pang, C. Highly Adaptable and Biocompatible Octopus-Like Adhesive Patches with Meniscus-Controlled Unfoldable 3D Microtips for Underwater Surface and Hairy Skin. Adv. Sci. 2018, 5, 1800100. [Google Scholar] [CrossRef]
- Hwang, G.W.; Lee, H.J.; Kim, D.W.; Yang, T.H.; Pang, C. Soft Microdenticles on Artificial Octopus Sucker Enable Extraordinary Adaptability and Wet Adhesion on Diverse Nonflat Surfaces. Adv. Sci. 2022, 9, 2202978. [Google Scholar] [CrossRef]
- Wu, Y.; Li, X.; Tian, H.; Wang, D.; Zhang, J.; Wang, L.; Shao, J. Microtemplated Electrowetting for Fabrication of Shape-Controllable Microdomes in Extruded Microsucker Arrays toward Octopus-Inspired Dry/Wet Adhesion. Adv. Funct. Mater. 2023, 33, 2210562. [Google Scholar] [CrossRef]
- Duan, W.; Yu, Z.; Cui, W.; Zhang, Z.; Zhang, W.; Tian, Y. Bio-inspired switchable soft adhesion for the boost of adhesive surfaces and robotics applications: A brief review. Adv. Colloid. Interface Sci. 2023, 313, 102862. [Google Scholar] [CrossRef] [PubMed]
- Dayan, C.B.; Chun, S.; Krishna-Subbaiah, N.; Drotlef, D.M.; Akolpoglu, M.B.; Sitti, M. 3D Printing of Elastomeric Bioinspired Complex Adhesive Microstructures. Adv. Mater. 2021, 33, 2103826. [Google Scholar] [CrossRef]
- Baik, S.; Kim, D.W.; Park, Y.; Lee, T.-J.; Ho Bhang, S.; Pang, C. A wet-tolerant adhesive patch inspired by protuberances in suction cups of octopi. Nature 2017, 546, 396–400. [Google Scholar] [CrossRef]
- Lee, Y.W.; Chun, S.; Son, D.; Hu, X.H.; Schneider, M.; Sitti, M. A Tissue Adhesion-Controllable and Biocompatible Small-Scale Hydrogel Adhesive Robot. Adv. Mater. 2022, 34, 2109325. [Google Scholar] [CrossRef]
- Wang, S.H.; Luo, H.Y.; Linghu, C.H.; Song, J.Z. Elastic Energy Storage Enabled Magnetically Actuated, Octopus-Inspired Smart Adhesive. Adv. Funct. Mater. 2021, 31, 2009217. [Google Scholar] [CrossRef]
- Wu, M.X.; Zheng, X.W.; Liu, R.S.; Hou, N.Z.; Afridi, W.H.; Afridi, R.H.; Guo, X.; Wu, J.N.; Wang, C.; Xie, G.M. Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing. Adv. Sci. 2022, 9, e2104382. [Google Scholar] [CrossRef] [PubMed]
- Mazzolai, B.; Mondini, A.; Tramacere, F.; Riccomi, G.; Sadeghi, A.; Giordano, G.; Del Dottore, E.; Scaccia, M.; Zampato, M.; Carminati, S. Octopus-Inspired Soft Arm with Suction Cups for Enhanced Grasping Tasks in Confined Environments. Adv. Intell. Syst. 2019, 1, 1900041. [Google Scholar] [CrossRef]
- Xie, Z.X.; Domel, A.G.; An, N.; Green, C.; Gong, Z.Y.; Wang, T.M.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Frey, S.T.; Haque, A.T.; Tutika, R.; Krotz, E.V.; Lee, C.; Haverkamp, C.B.; Markvicka, E.J.; Bartlett, M.D. Octopus-inspired adhesive skins for intelligent and rapidly switchable underwater adhesion. Sci. Adv. 2022, 8, eabq1905. [Google Scholar] [CrossRef]
- Gorb, E.; Gorb, S. Contact separation force of the fruit burrs in four plant species adapted to dispersal by mechanical interlocking. Plant Physiol. Biochem. 2002, 40, 373–381. [Google Scholar] [CrossRef]
- Chen, Q.; Gorb, S.N.; Gorb, E.; Pugno, N. Mechanics of plant fruit hooks. J. R. Soc. Interface 2013, 10, 20120913. [Google Scholar] [CrossRef] [PubMed]
- Kojima, T. Developmental mechanism of the tarsus in insect legs. Curr. Opin. Insect Sci. 2017, 19, 36–42. [Google Scholar] [CrossRef] [PubMed]
- Andrews, H.G.; Badyal, J.P.S. Bioinspired hook surfaces based upon a ubiquitous weed (Galium aparine) for dry adhesion. J. Adhes. Sci. Technol. 2014, 28, 1243–1255. [Google Scholar] [CrossRef]
- Busshardt, P.; Kunze, D.; Gorb, S.N. Interlocking-based attachment during locomotion in the beetle Pachnoda marginata (Coleoptera, Scarabaeidae). Sci. Rep. 2014, 4, 6998. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Dai, Z.D.; Wang, Z.Y.; Ji, A.H.; Gorb, S.N. The synergy between the insect-inspired claws and adhesive pads increases the attachment ability on various rough surfaces. Sci. Rep. 2016, 6, 26219. [Google Scholar] [CrossRef] [PubMed]
- Dodds, G.S.; Hisaw, F.L. Ecological studies of aquatic insects I Adaptations of mayfly nymphs to swift streams. Ecology 1924, 5, 137–148. [Google Scholar] [CrossRef]
- Ditsche-Kuru, P.; Koop, J.H.E. New insights into a life in current: Do the gill lamellae of Epeorus assimilis and Iron alpicola larvae (Ephemeroptera: Heptageniidae) function as a sucker or as friction pads? Aquat. Insects 2009, 31, 495–506. [Google Scholar] [CrossRef]
- Ditsche-Kuru, P.; Barthlott, W.; Koop, J.H.E. At which surface roughness do claws cling? Investigations with larvae of the running water mayfly Epeorus assimilis (Heptageniidae, Ephemeroptera). Zoology 2012, 115, 379–388. [Google Scholar] [CrossRef]
- Johal, M.S.; Rawal, Y.K. Mechanism of adhesion in a hillstream fish, Glyptothorax garhwali Tilak, as revealed by scanning electron microscopy of adhesive apparatus. Curr. Sci. 2003, 85, 1273–1275. [Google Scholar]
- Asbeck, A.T. Compliant Directional Suspensions for Climbing with Spines and Adhesives; Stanford University: Stanford, CA, USA, 2010. [Google Scholar]
- Asbeck, A.T.; Kim, S.; Cutkosky, M.R.; Provancher, W.R.; Lanzetta, M. Scaling hard vertical surfaces with compliant microspine arrays. Int. J. Robot. Res. 2006, 25, 1165–1179. [Google Scholar] [CrossRef]
- Liu, Y.; Lam, T.L.; Qian, H.; Xu, Y. Design and analysis of gripper with retractable spine for tree climbing robots. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 350–355. [Google Scholar]
- Kim, S.; Asbeck, A.T.; Cutkosky, M.R.; Provancher, W.R. SpinybotII: Climbing hard walls with compliant microspines. In Proceedings of the ICAR’05. Proceedings., 12th International Conference on Advanced Robotics, Seattle, WA, USA, 18–20 July 2005; pp. 601–606. [Google Scholar]
- Asbeck, A.T.; Kim, S.; McClung, A.; Parness, A.; Cutkosky, M.R. Climbing walls with microspines. In Proceedings of the IEEE ICRA, Orlando, FL, USA, 15–19 May 2006; pp. 4315–4317. [Google Scholar]
- Autumn, K.; Buehler, M.; Cutkosky, M.; Fearing, R.; Full, R.J.; Goldman, D.; Groff, R.; Provancher, W.; Rizzi, A.A.; Saranli, U. Robotics in scansorial environments. In Proceedings of the Unmanned Ground Vehicle Technology VII, Orlando, FL, USA, 28 March—1 April 2005; pp. 291–302. [Google Scholar]
- Spenko, M.J.; Haynes, G.C.; Saunders, J.; Cutkosky, M.R.; Rizzi, A.A.; Full, R.J.; Koditschek, D.E. Biologically inspired climbing with a hexapedal robot. J. Field Robot. 2008, 25, 223–242. [Google Scholar] [CrossRef]
- Haynes, G.C.; Khripin, A.; Lynch, G.; Amory, J.; Saunders, A.; Rizzi, A.A.; Koditschek, D.E. Rapid pole climbing with a quadrupedal robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2767–2772. [Google Scholar]
- Daltorio, K.A.; Wei, T.E.; Gorb, S.N.; Ritzmann, R.E.; Quinn, R.D. Passive foot design and contact area analysis for climbing mini-whegs. In Proceedings of the Proceedings 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1274–1279. [Google Scholar]
- Daltorio, K.A.; Wei, T.E.; Horchler, A.D.; Southard, L.; Wile, G.D.; Quinn, R.D.; Gorb, S.N.; Ritzmann, R.E. Mini-whegs TM climbs steep surfaces using insect-inspired attachment mechanisms. Int. J. Robot. Res. 2009, 28, 285–302. [Google Scholar] [CrossRef]
- Clark, J.E.; Goldman, D.I.; Lin, P.-C.; Lynch, G.; Chen, T.S.; Komsuoglu, H.; Full, R.J.; Koditschek, D. Design of a Bio-Inspired Dynamical Vertical Climbing Robot; MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Parness, A. Anchoring foot mechanisms for sampling and mobility in microgravity. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 6596–6599. [Google Scholar]
- Parness, A.; Frost, M.; Thatte, N.; King, J.P. Gravity-independent mobility and drilling on natural rock using microspines. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3437–3442. [Google Scholar]
- Kennedy, B.; Okon, A.; Aghazarian, H.; Badescu, M.; Bao, X.; Bar-Cohen, Y.; Chang, Z.; Dabiri, B.E.; Garrett, M.; Magnone, L. Lemur IIb: A robotic system for steep terrain access. Ind. Robot Int. J. 2006, 33, 265–269. [Google Scholar] [CrossRef]
- Parness, A.; Willig, A.; Berg, A.; Shekels, M.; Arutyunov, V.; Dandino, C.; Kennedy, B. A microspine tool: Grabbing and anchoring to boulders on the asteroid redirect mission. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–10. [Google Scholar]
- Parness, A.; Evans, T.; Raff, W.; King, J.; Carpenter, K.; Willig, A.; Grimes-York, J.; Berg, A.; Fouad, E.; Wiltsie, N. Maturing microspine grippers for space applications through test campaigns. In Proceedings of the AIAA SPACE and Astronautics Forum and Exposition, Orlando, FL, USA, 12–14 September 2017; p. 5311. [Google Scholar]
- Liu, G.; Liu, Y.; Wang, X.; Wu, X.; Mei, T. Design and experiment of a bioinspired wall-climbing robot using spiny grippers. In Proceedings of the 2016 IEEE international conference on mechatronics and automation, Harbin, China, 7–10 August 2016; pp. 665–670. [Google Scholar]
- Liu, Y.; Wang, L.; Niu, F.; Li, P.; Li, Y.; Mei, T. A track-type inverted climbing robot with bio-inspired spiny grippers. J. Bionic Eng. 2020, 17, 920–931. [Google Scholar] [CrossRef]
- Roderick, W.R.T.; Cutkosky, M.R.; Lentink, D. Bird-inspired dynamic grasping and perching in arboreal environments. Sci. Robot. 2021, 6, eabj7562. [Google Scholar] [CrossRef]
- Zufferey, R.; Tormo Barbero, J.; Feliu Talegon, D.; Nekoo, S.R.; Acosta, J.-A.; Ollero, A. How Ornithopters Can Perch Autonomously On A Branch. Nat. Commun. 2022, 13, 7713. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef]
- Lee, S.H.; Song, H.W.; Kang, B.S.; Kwak, M.K. Remora-Inspired Reversible Adhesive for Underwater Applications. Acs Appl. Mater. Interfaces 2019, 11, 47571–47576. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar] [CrossRef]
- Li, L.; Wang, S.; Zhang, Y.; Song, S.; Wang, C.; Tan, S.; Zhao, W.; Wang, G.; Sun, W.; Yang, F. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef]
- Kier, W.M.; Smith, A.M. The structure and adhesive mechanism of octopus suckers. Integr. Comp. Biol. 2002, 42, 1146–1153. [Google Scholar] [CrossRef] [PubMed]
- Jin, K.; Tian, Y.; Erickson, J.S.; Puthoff, J.; Autumn, K.; Pesika, N.S. Design and Fabrication of Gecko-Inspired Adhesives. Langmuir 2012, 28, 5737–5742. [Google Scholar] [CrossRef] [PubMed]
- Gillies, A.G.; Kwak, J.; Fearing, R.S. Controllable Particle Adhesion with a Magnetically Actuated Synthetic Gecko Adhesive. Adv. Funct. Mater. 2013, 23, 3256–3261. [Google Scholar] [CrossRef]
- Zhou, M.; Tian, Y.; Sameoto, D.; Zhang, X.J.; Meng, Y.G.; Wen, S.Z. Controllable Interfacial Adhesion Applied to Transfer Light and Fragile Objects by Using Gecko Inspired Mushroom-Shaped Pillar Surface. ACS Appl. Mater. Interfaces 2013, 5, 10137–10144. [Google Scholar] [CrossRef]
- Mahdavi, A.; Ferreira, L.; Sundback, C.; Nichol, J.W.; Chan, E.P.; Carter, D.J.D.; Bettinger, C.J.; Patanavanich, S.; Chignozha, L.; Ben-Joseph, E.; et al. A biodegradable and biocompatible gecko-inspired tissue adhesive. Proc. Natl. Acad. Sci. USA 2008, 105, 2307–2312. [Google Scholar] [CrossRef]
- Pang, C.; Kang, D.; Kim, T.-I.; Suh, K.-Y. Analysis of Preload-Dependent Reversible Mechanical Interlocking Using Beetle-Inspired Wing Locking Device. Langmuir 2012, 28, 2181–2186. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yin, F.; Tian, Y. Biomimetic Structure and Surface for Grasping Tasks. Biomimetics 2024, 9, 144. https://doi.org/10.3390/biomimetics9030144
Li J, Yin F, Tian Y. Biomimetic Structure and Surface for Grasping Tasks. Biomimetics. 2024; 9(3):144. https://doi.org/10.3390/biomimetics9030144
Chicago/Turabian StyleLi, Jingyang, Fujie Yin, and Yu Tian. 2024. "Biomimetic Structure and Surface for Grasping Tasks" Biomimetics 9, no. 3: 144. https://doi.org/10.3390/biomimetics9030144
APA StyleLi, J., Yin, F., & Tian, Y. (2024). Biomimetic Structure and Surface for Grasping Tasks. Biomimetics, 9(3), 144. https://doi.org/10.3390/biomimetics9030144