
Stable Walking of a Biped Robot Controlled by Central Pattern Generator Using Multivariate Linear Mapping


Abstract
1. Introduction
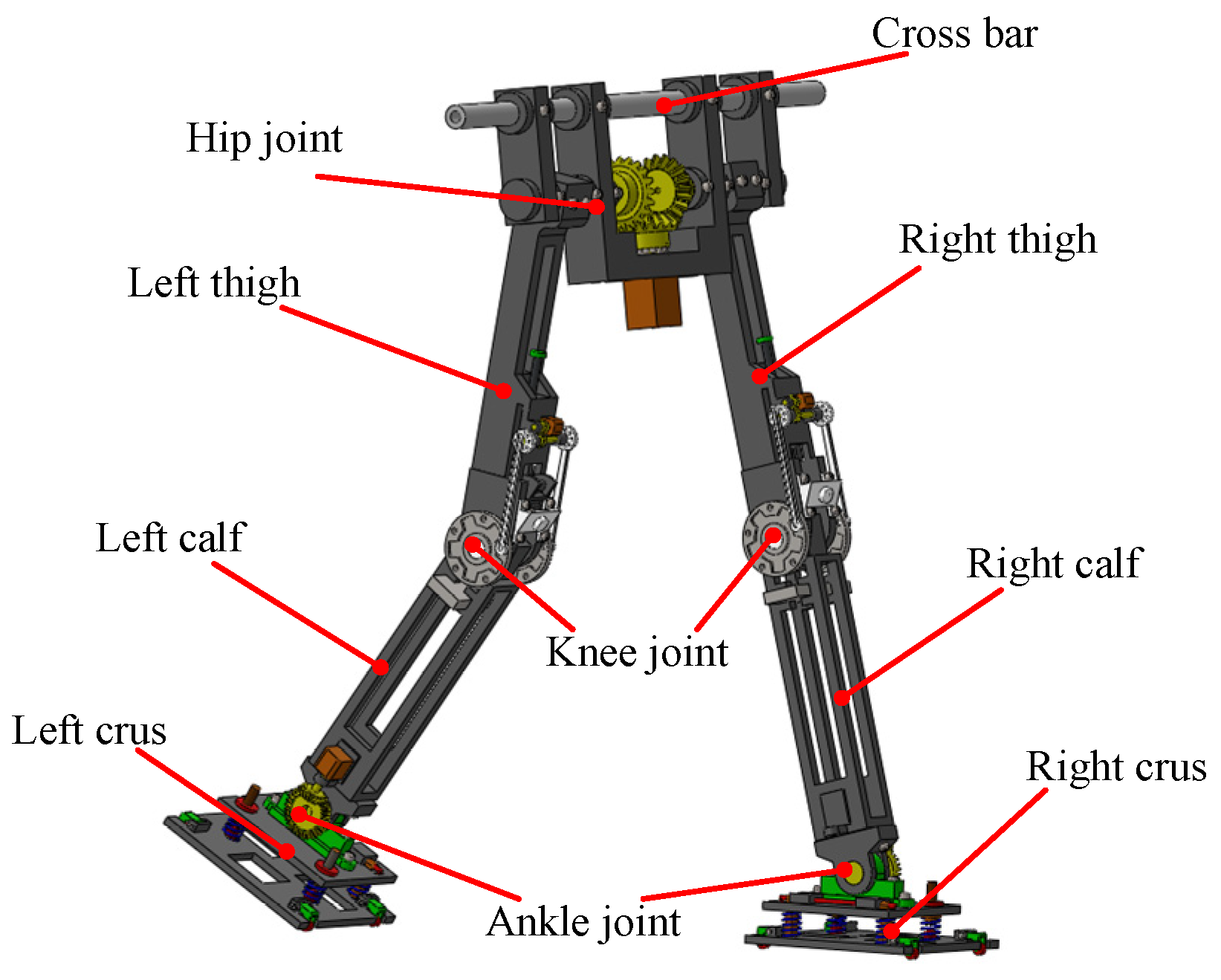
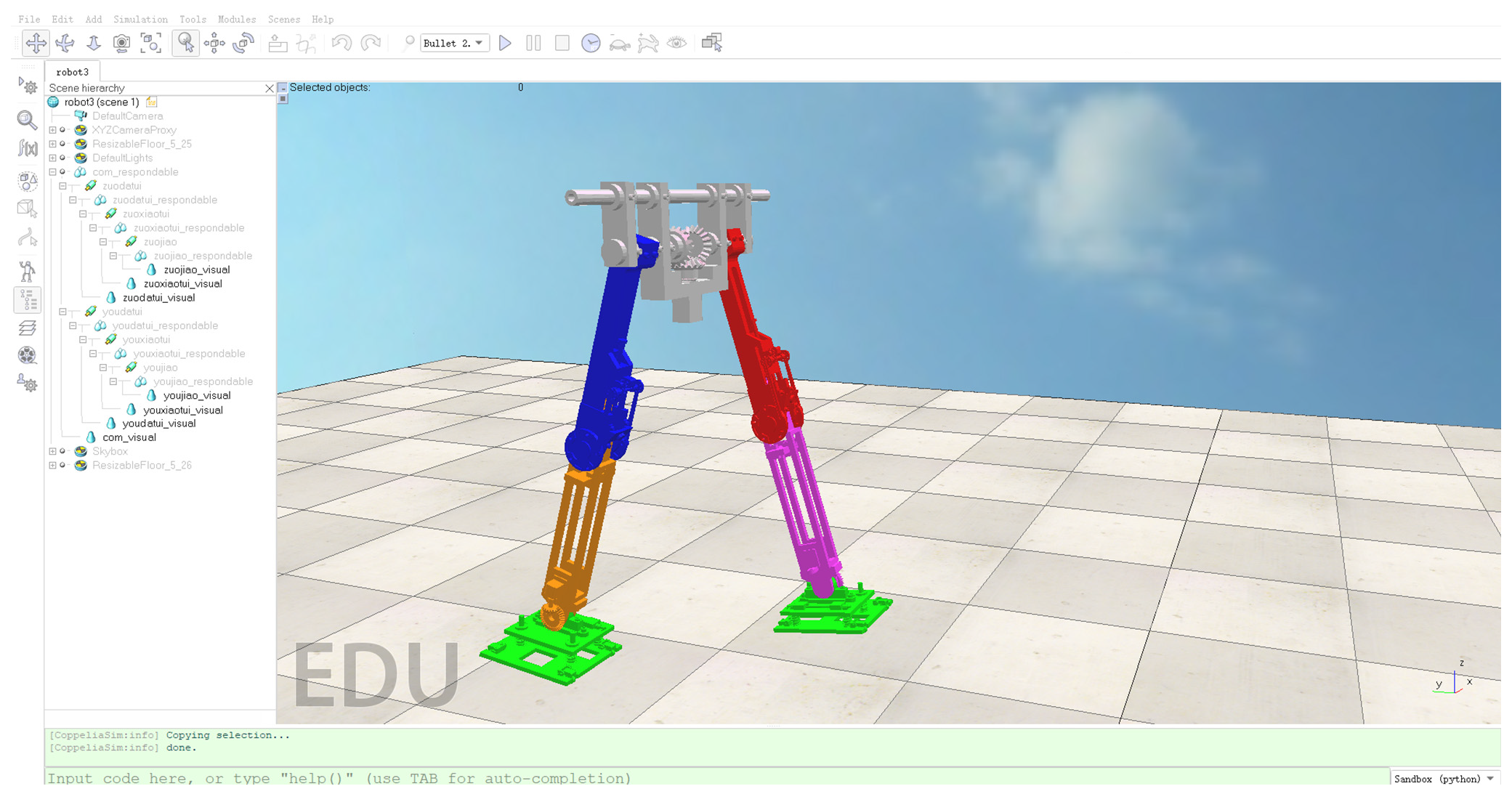
2. Mechanical Structure of Biped Robot
3. Hybrid Dynamics of Biped Robot
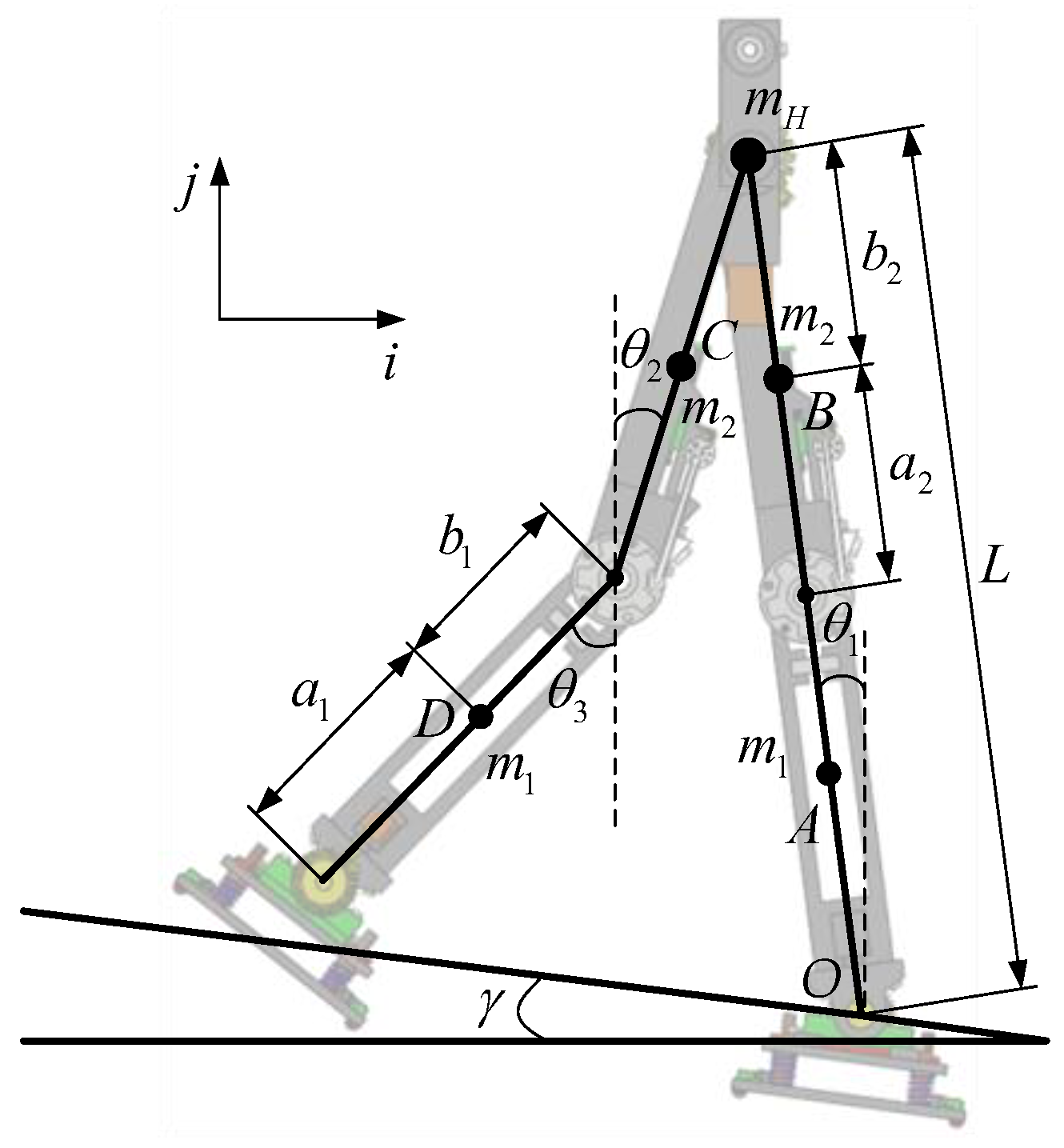
3.1. Dynamics of Biped Robot
- The support foot has maintained contact with the ground, and there is no relative slip whether the biped robot is in the single-legged support phase or double-legged support phase.
- In the support leg support stage, the knee joint collision between the thigh and calf of the swing leg begins, and the collision process is instantaneous.
- The contact process between the swing leg and the ground is assumed to be a completely elastic collision, and the collision time is instantaneous.
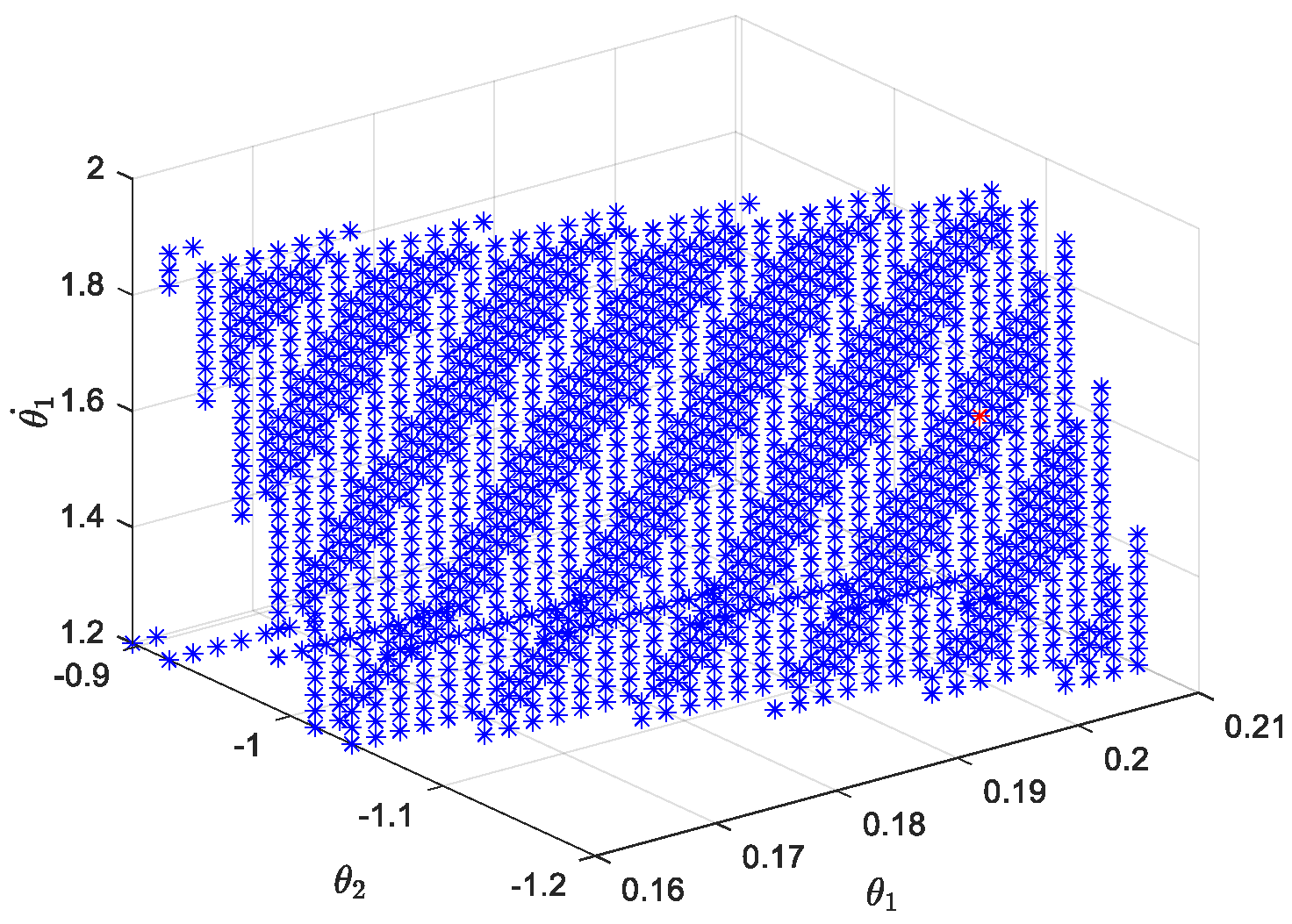
3.2. Initial Value Solution of Passive Walking
4. Walking Control of Biped Robot Based on New CPG
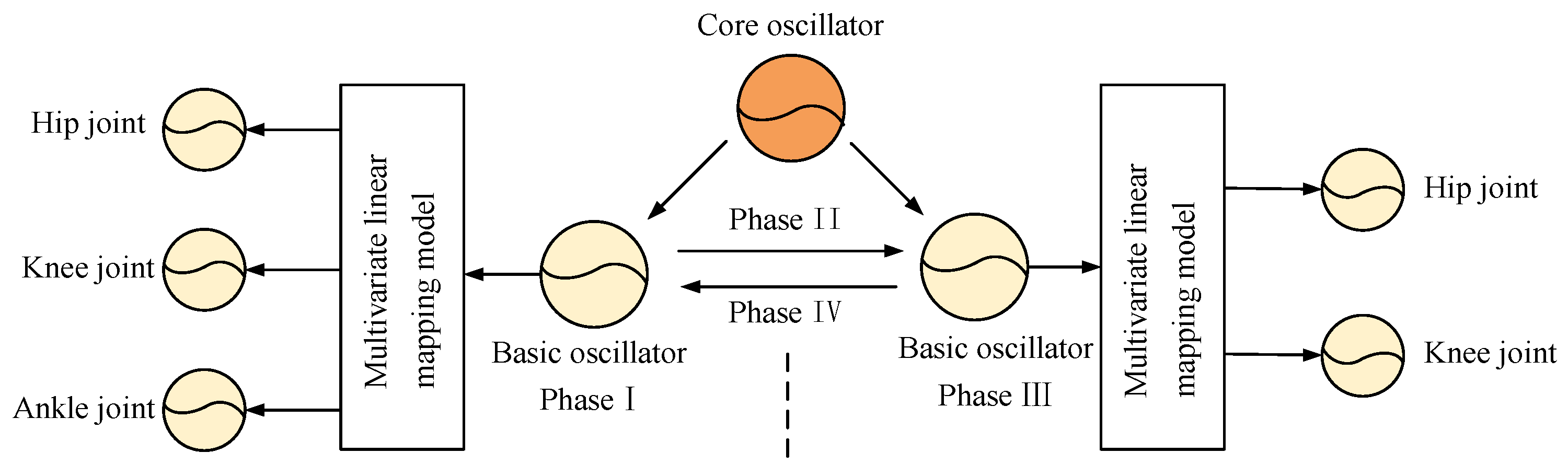
4.1. CPG Controller Based on Multivariate Linear Mapping
4.2. Walk on Flat Ground
4.3. Walking on the Uphill
4.4. General CPG Parameter-Tuning Idea
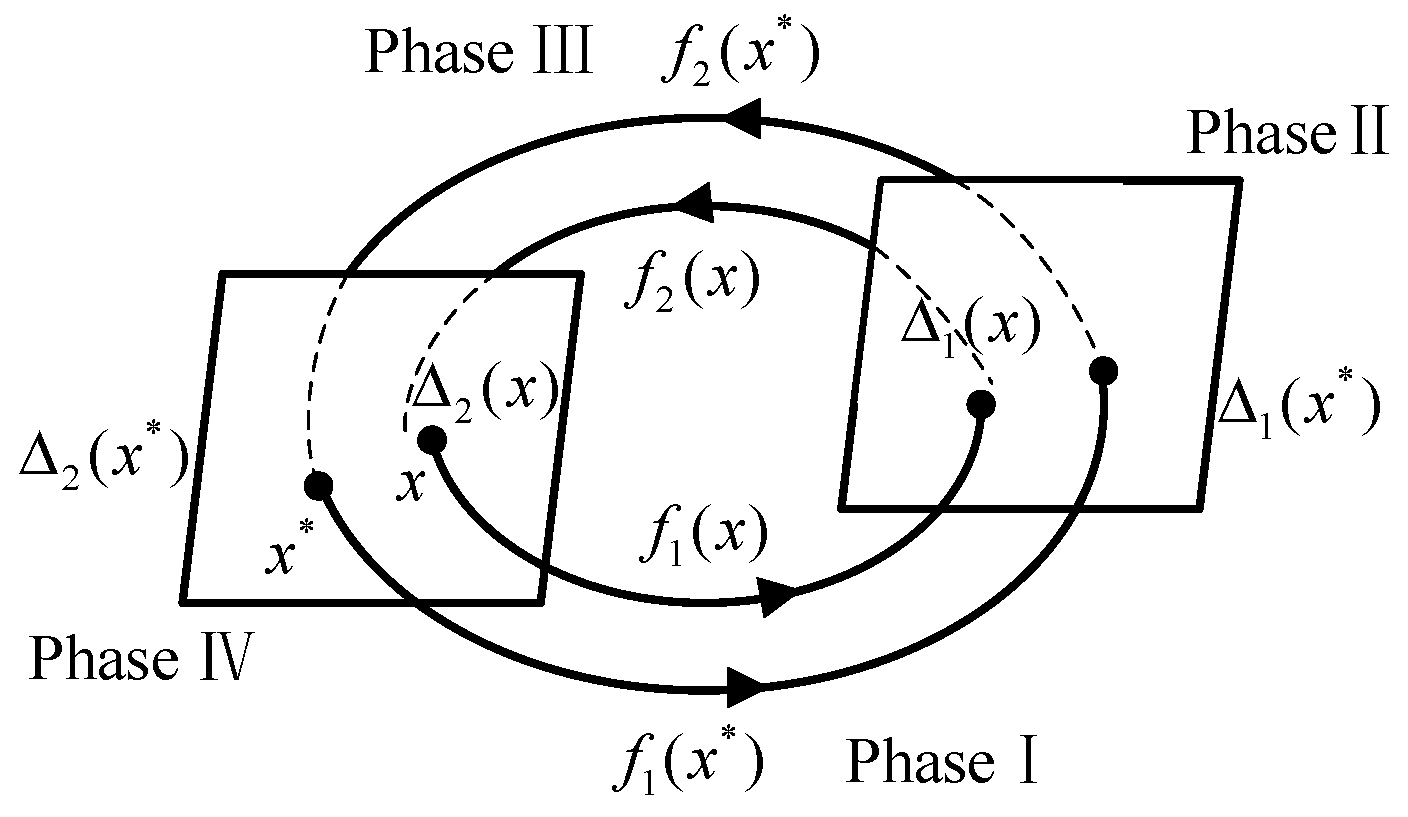
- Firstly, according to the gait phase I and III, the basic oscillator model is established, respectively, and the oscillator parameter is initialized.
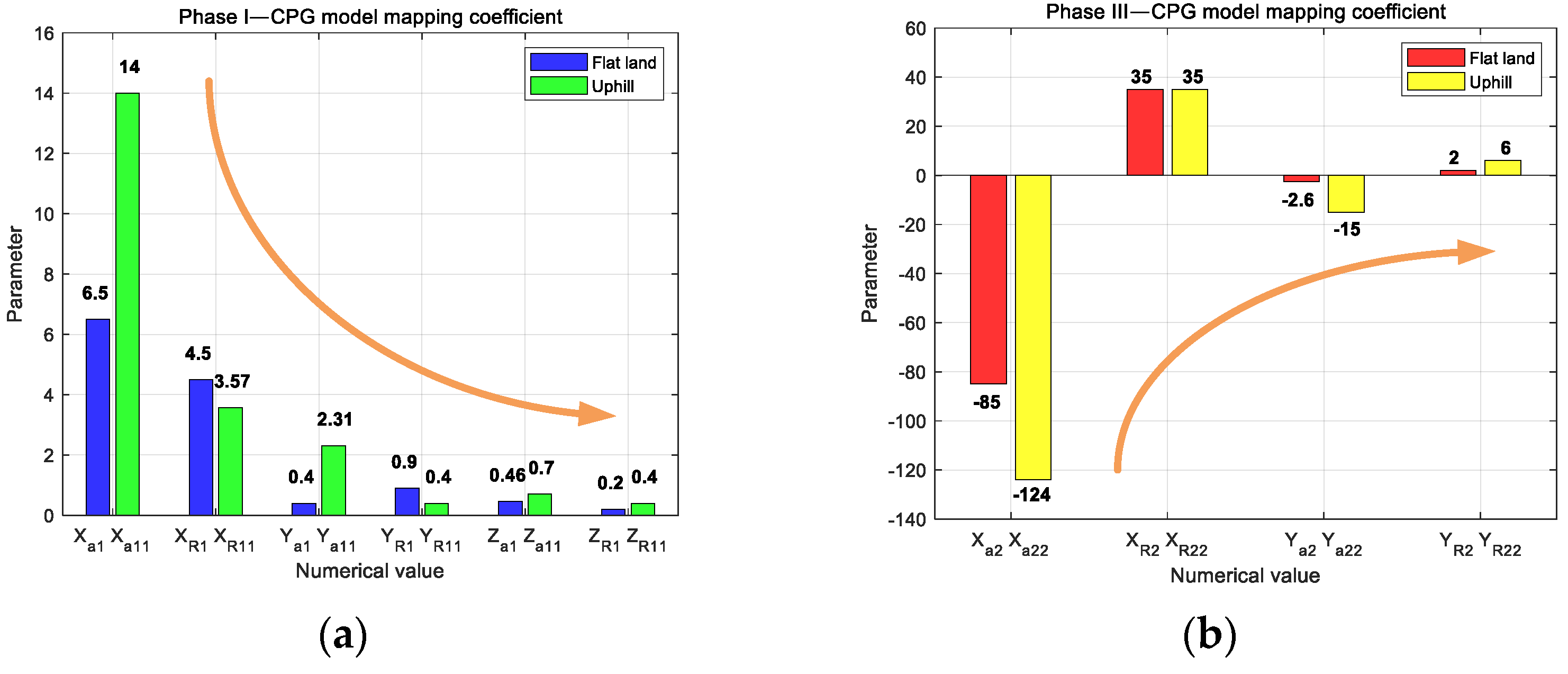
- Establish a multivariate linear mapping model that matches phase I and III.
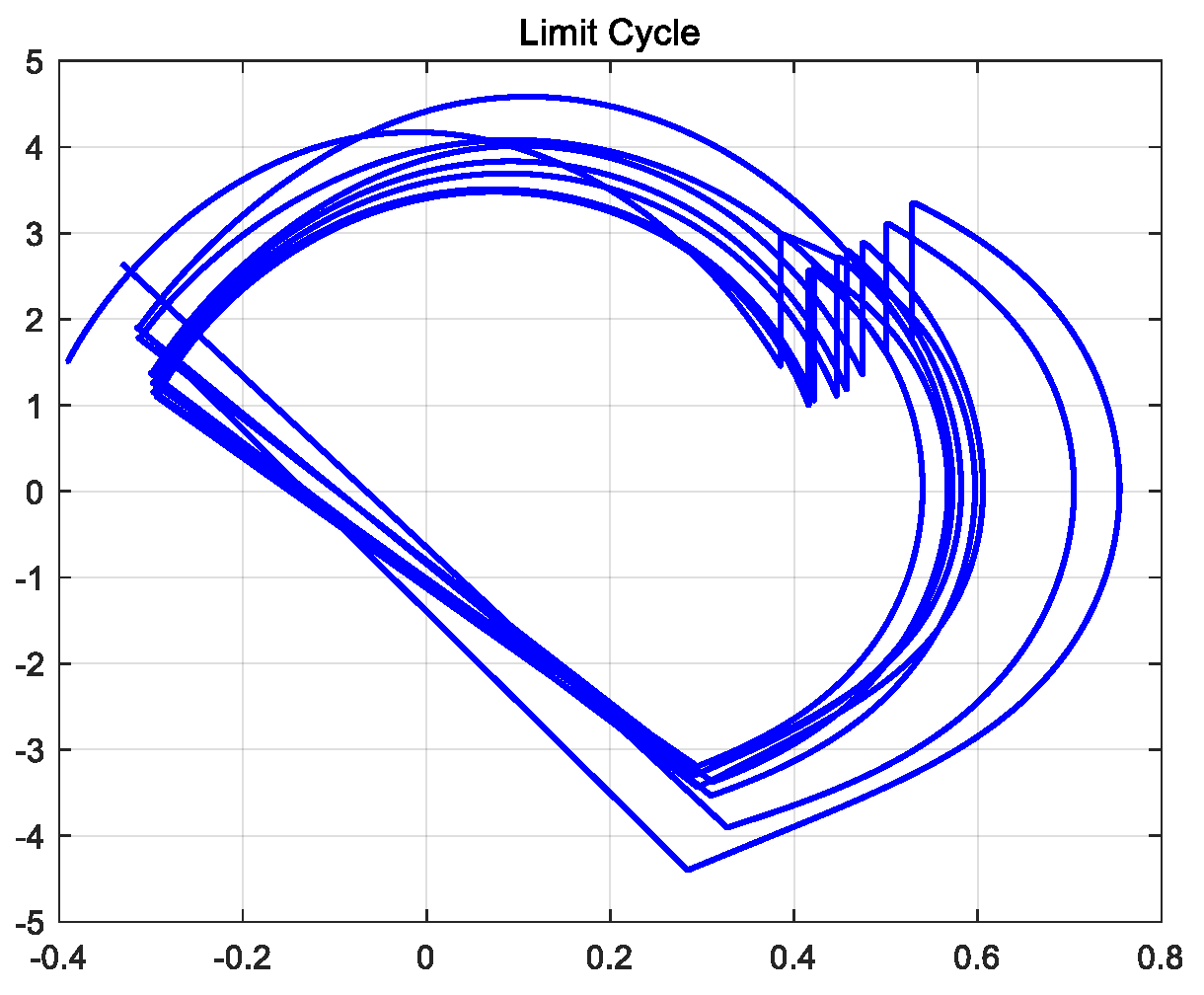
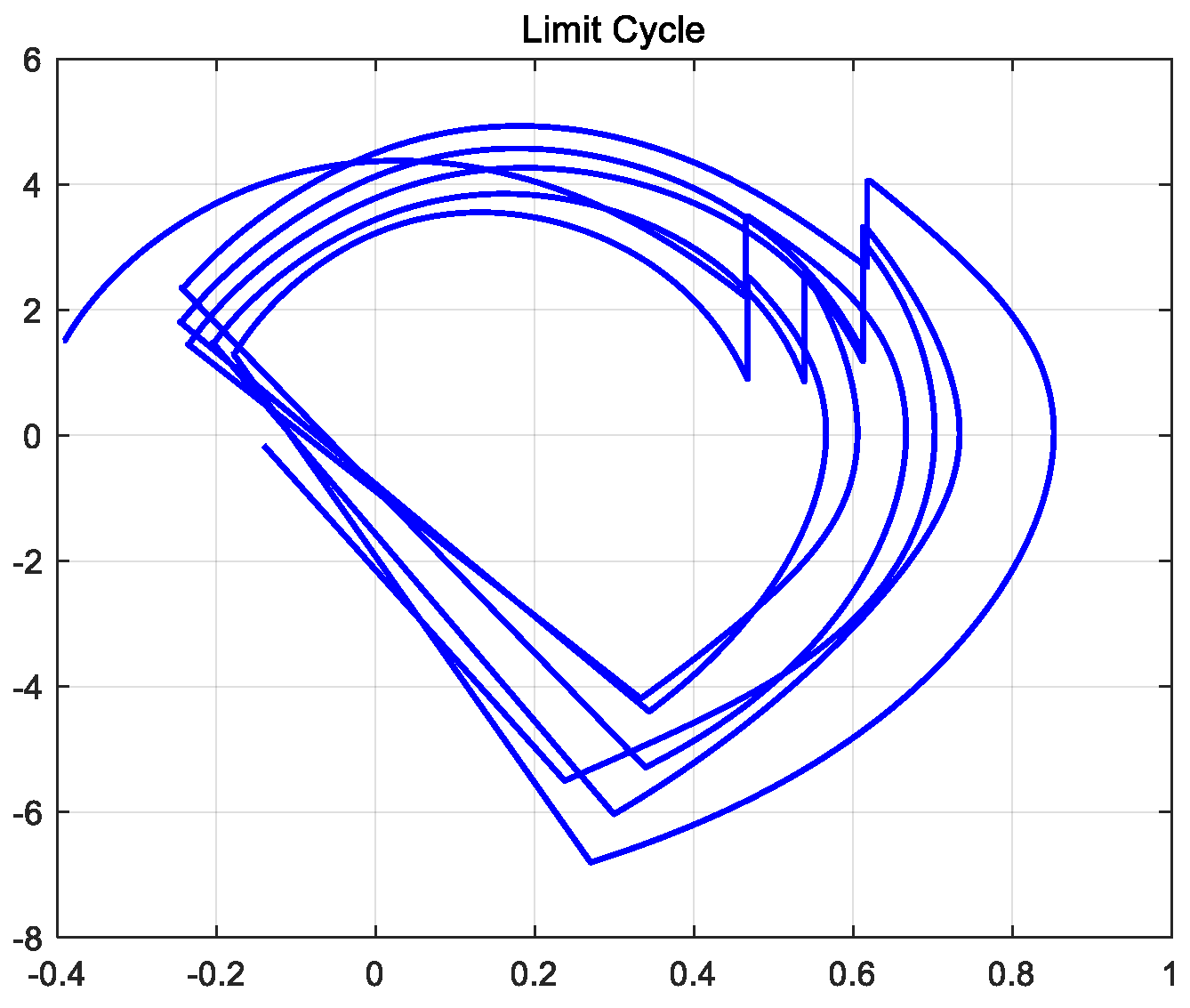
- According to the parameter distribution of phase I and phase III, the CPG parameters of the stable walking of the biped robot on terrain are preliminarily adjusted. The parameters in phase I are preset, and the mapping parameters are assigned according to the trend from large to small. In phase III, the parameters are assigned according to eight times the absolute value of the parameters in phase I, and the sign changes are noted. According to the obtained biped robot walking limit cycle, the CPG parameters are fine-tuned.
- The optimization algorithm [34] is used to adjust the CPG parameters of the biped robot in other terrains near a set of parameters successfully debugged.
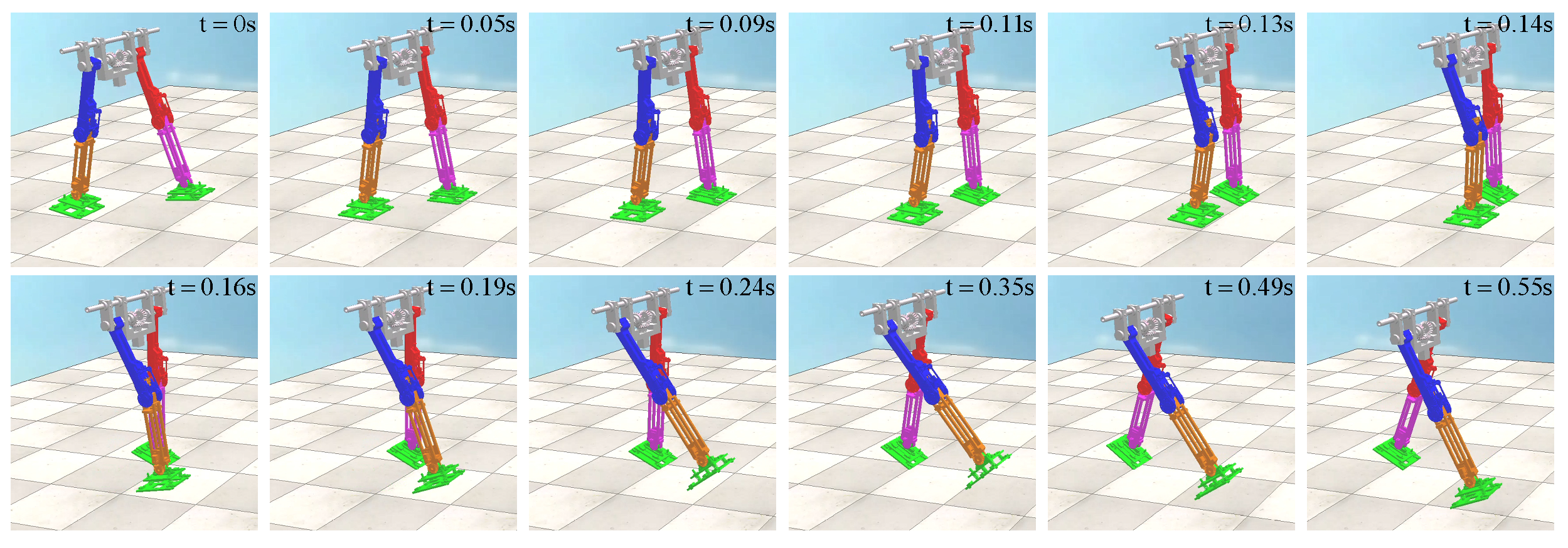
5. Walking Results under CPG
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Passive Walking Gait Modeling of Underactuated Biped Robot
Appendix A.1.1. Phase I
Appendix A.1.2. Phase II
Appendix A.1.3. Phase III
Appendix A.1.4. Phase IV
References
- Baines, R.; Patiballa, S.K.; Booth, J.; Ramirez, L.; Sipple, T.; Garcia, A.; Fish, F.; Kramer-Bottiglio, R. Multi-environment robotic transitions through adaptive morphogenesis. Nature 2022, 610, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Vishwanath, A.; Singh, A.; Chua, Y.H.V.; Dauwels, J.; Magnenat-Thalmann, N. Humanoid co-workers: How is it like to work with a robot? In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Tokyo, Japan, 12–15 August 2019; pp. 1–6. [Google Scholar]
- Cui, J.; Trinkle, J. Toward next-generation learned robot manipulation. Sci. Robot. 2021, 6, eabd9461. [Google Scholar] [CrossRef] [PubMed]
- Chavdarov, I.; Yovchev, K.; Miteva, L.; Stefanov, A.; Nedanovski, D. A strategy for controlling motions related to sensory information in a walking robot big foot. Sensors 2023, 23, 1506. [Google Scholar] [CrossRef]
- McCartney, G.; McCartney, A. Rise of the machines: Towards a conceptual service-robot research framework for the hospitality and tourism industry. Int. J. Contemp. Hosp. Manag. 2020, 32, 3835–3851. [Google Scholar] [CrossRef]
- Chen, B.; Zang, X.; Zhang, Y.; Gao, L.; Zhu, Y.; Zhao, J. A non-flat terrain biped gait planner based on DIRCON. Biomimetics 2022, 7, 203. [Google Scholar] [CrossRef] [PubMed]
- McGeer, T. Passive Dynamic Walking. Int. J. Robot. Res. 1990, 9, 62–82. [Google Scholar] [CrossRef]
- Kim, D.; Jorgensen, S.J.; Lee, J.; Ahn, J.; Luo, J.; Sentis, L. Dynamic locomotion for passive-ankle biped robots and humanoids using whole-body locomotion control. Int. J. Robot. Res. 2020, 39, 936–956. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, H.; Wang, Z.; Chen, Q. Finite-time stabilization of periodic orbits for under-actuated biped walking with hybrid zero dynamics. Commun. Nonlinear Sci. Numer. Simul. 2020, 80, 104949. [Google Scholar] [CrossRef]
- Westervelt, E.R.; Grizzle, J.W.; Koditschek, D.E. Hybrid zero dynamics of planar biped walkers. IEEE Trans. Autom. Control 2003, 48, 42–56. [Google Scholar] [CrossRef]
- Wu, Y.; Yao, D.; Xiao, X.; Guo, Z. Intelligent controller for passivity-based biped robot using deep Q network. J. Intell. Fuzzy Syst. 2019, 36, 731–745. [Google Scholar] [CrossRef]
- Wu, Y.; Qiao, S.; Yao, D. A hybrid chaotic controller integrating hip stiffness modulation and reinforcement learning-based torque control to stabilize passive dynamic walking. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 673–691. [Google Scholar] [CrossRef]
- Zhang, F.; Demiris, Y. Learning garment manipulation policies toward robot-assisted dressing. Sci. Robot. 2022, 7, eabm6010. [Google Scholar] [CrossRef] [PubMed]
- Silvério, J.; Calinon, S.; Rozo, L.; Caldwell, D.G. Learning task priorities from demonstrations. IEEE Trans. Robot. 2018, 35, 78–94. [Google Scholar] [CrossRef]
- Tong, Y.; Liu, H.; Zhang, Z. Advancements in humanoid robots: A comprehensive review and future prospects. IEEE/CAA J. Autom. Sin. 2024, 11, 301–328. [Google Scholar] [CrossRef]
- Thor, M.; Kulvicius, T.; Manoonpong, P. Generic neural locomotion control framework for legged robots. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4013–4025. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Fang, Q.; Liu, C.; Chen, Q. Central Pattern Generator with Defined Pulse Signals for Compliant-Resistant Control of Biped Robots. Biomimetics 2023, 8, 100. [Google Scholar] [CrossRef] [PubMed]
- Şafak, K.K.; Baturalp, T.B.; Bozkurt, S. Parametric Design and Prototyping of a Low-Power Planar Biped Robot. Biomimetics 2023, 8, 346. [Google Scholar] [CrossRef]
- Yu, J.; Tan, M.; Chen, J.; Zhang, J. A survey on CPG-inspired control models and system implementation. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 441–456. [Google Scholar] [CrossRef]
- Wang, Y.; Xue, X.; Chen, B. Matsuoka’s CPG with desired rhythmic signals for adaptive walking of humanoid robots. IEEE Trans. Cybern. 2018, 50, 613–626. [Google Scholar] [CrossRef]
- Pasandi, V.; Sadeghian, H.; Keshmiri, M.; Pucci, D. An integrated programmable CPG with bounded output. IEEE Trans. Autom. Control 2022, 67, 4658–4673. [Google Scholar] [CrossRef]
- Deshpande, A.M.; Hurd, E.; Minai, A.A.; Kumar, M. Deepcpg policies for robot locomotion. IEEE Trans. Cogn. Dev. Syst. 2023, 15, 2108–2121. [Google Scholar] [CrossRef]
- Akkawutvanich, C.; Knudsen, F.I.; Riis, A.F.; Larsen, J.C.; Manoonpong, P. Adaptive parallel reflex-and decoupled CPG-based control for complex bipedal locomotion. Robot. Auton. Syst. 2020, 134, 103663. [Google Scholar] [CrossRef]
- Bai, L.; Hu, H.; Chen, X.; Sun, Y.; Ma, C.; Zhong, Y. CPG-based gait generation of the curved-leg hexapod robot with smooth gait transition. Sensors 2019, 19, 3705. [Google Scholar] [CrossRef]
- He, B.; Si, Y.; Wang, Z.; Zhou, Y. Hybrid CPG–FRI dynamic walking algorithm balancing agility and stability control of biped robot. Auton. Robot. 2019, 43, 1855–1865. [Google Scholar] [CrossRef]
- Liu, C.; Yang, J.; An, K.; Chen, Q. Rhythmic-reflex hybrid adaptive walking control of biped robot. J. Intell. Robot. Syst. 2019, 94, 603–619. [Google Scholar] [CrossRef]
- Yao, C.; Liu, C.; Xia, L.; Liu, M.; Chen, Q. Humanoid adaptive locomotion control through a bioinspired CPG-based controller. Robotica 2022, 40, 762–779. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Fang, Y.; Liu, H.; Guo, X. A Novel Design Methodology of CPG Model for a Salamander-like Robot. IEEE Robot. Autom. Lett. 2024, 9, 6115–6122. [Google Scholar] [CrossRef]
- Wang, J.; Lu, S.; Chen, J. A CPG-based gait planning method for bipedal robots. Artif. Life Robot. 2024, 29, 340–348. [Google Scholar]
- Li, G.; Ijspeert, A.; Hayashibe, M. AI-CPG: Adaptive Imitated Central Pattern Generators for Bipedal Locomotion Learned Through Reinforced Reflex Neural Networks. IEEE Robot. Autom. Lett. 2024, 9, 5190–5197. [Google Scholar] [CrossRef]
- Hsu, C.S. A Theory of Cell-to-Cell Mapping Dynamical Systems. J. Appl. Mech. 1980, 47, 931–939. [Google Scholar] [CrossRef]
- Znegui, W.; Gritli, H.; Belghith, S. A new Poincaré map for investigating the complex walking behavior of the compass-gait biped robot. Appl. Math. Model. 2021, 94, 534–557. [Google Scholar] [CrossRef]
- Tang, J.; Huang, H.; Zhang, T.; Du, Q. Motion Control of Quadruped Robot Based on Improved CPG Algorithm. In Proceedings of the 2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 15–17 March 2024; pp. 1527–1533. [Google Scholar]
- Wu, Y.; Yao, D.; Xiao, X. Optimal design for flexible passive biped walker based on chaotic particle swarm optimization. J. Electr. Eng. Technol. 2018, 13, 2493–2503. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Sign | Values [Unit] |
|---|---|---|
| Leg length | 0.9062 [m] | |
| Waist mass | 11 [kg] | |
| Leg mass | 2.2 [kg] | |
| Thigh mass | 11 [kg] | |
| Centroid position of calf | 0.614 | |
| Centroid position of thigh | 0.468 | |
| Acceleration of gravity | g | 9.8 [m s−2] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Tang, B.; Tang, J.; Qiao, S.; Pang, X.; Guo, L. Stable Walking of a Biped Robot Controlled by Central Pattern Generator Using Multivariate Linear Mapping. Biomimetics 2024, 9, 626. https://doi.org/10.3390/biomimetics9100626
Wu Y, Tang B, Tang J, Qiao S, Pang X, Guo L. Stable Walking of a Biped Robot Controlled by Central Pattern Generator Using Multivariate Linear Mapping. Biomimetics. 2024; 9(10):626. https://doi.org/10.3390/biomimetics9100626
Chicago/Turabian StyleWu, Yao, Biao Tang, Jiawei Tang, Shuo Qiao, Xiaobing Pang, and Lei Guo. 2024. "Stable Walking of a Biped Robot Controlled by Central Pattern Generator Using Multivariate Linear Mapping" Biomimetics 9, no. 10: 626. https://doi.org/10.3390/biomimetics9100626
APA StyleWu, Y., Tang, B., Tang, J., Qiao, S., Pang, X., & Guo, L. (2024). Stable Walking of a Biped Robot Controlled by Central Pattern Generator Using Multivariate Linear Mapping. Biomimetics, 9(10), 626. https://doi.org/10.3390/biomimetics9100626