

Effect of Indentation Depth on Friction Coefficient in Adhesive Contacts: Experiment and Simulation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theoretical Estimation of the Friction Coefficient for Adhesive Contacts
- (1)
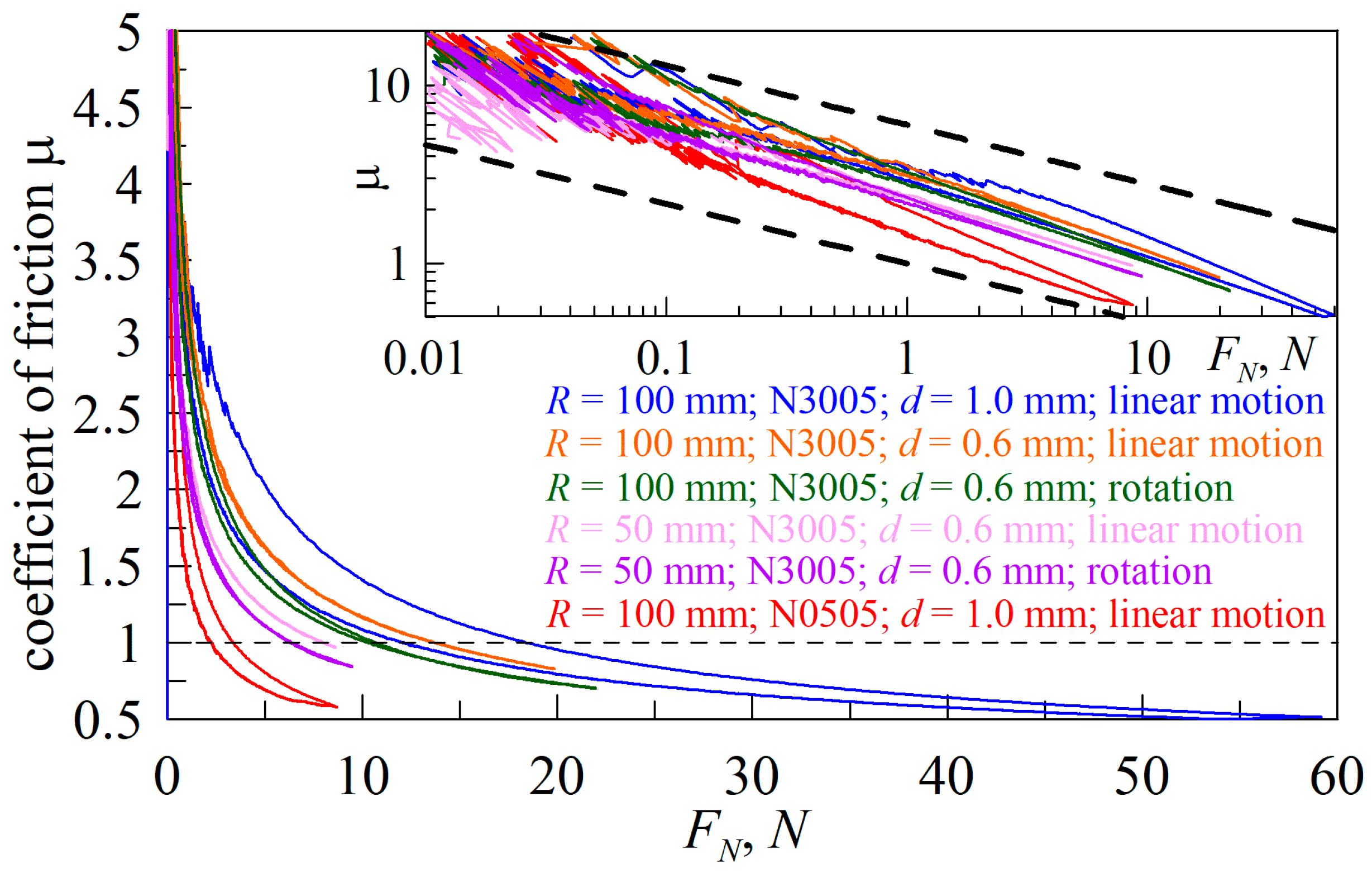
- In the case of 0 < n < 1, the friction coefficient (μ) increases with the increase in normal force. The reason for this behavior lies in the fact that with such forms of the indenter, the normal force (FN) increases slower than the contact area (A).
- (2)
- For conical indenters, where n = 1, the friction coefficient does not depend on either the normal force (FN) or the indentation depth (d) and is equal to a constant value
- (3)
- In the case n > 1, the friction coefficient decreases with the increase in normal force (FN).
- (4)
- In the case when n >> 1, the indenter turns into a flat stamp (the contact area (A) is a constant and is independent from indentation depth and normal force). Therefore, for n → ∞, Equation (13) shows the asymptotic behavior
3. Experimental Technique
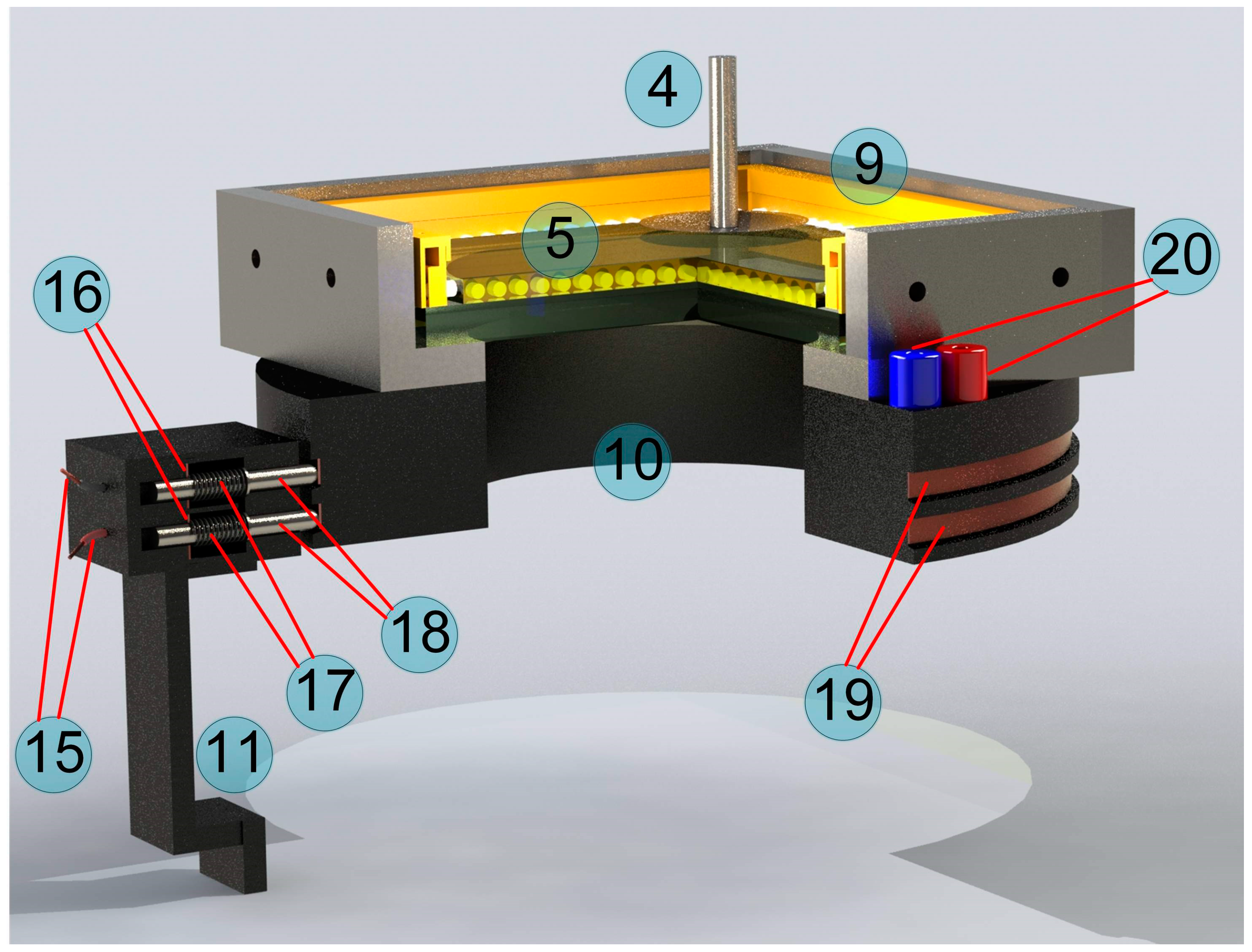
3.1. Description of Experimental Equipment
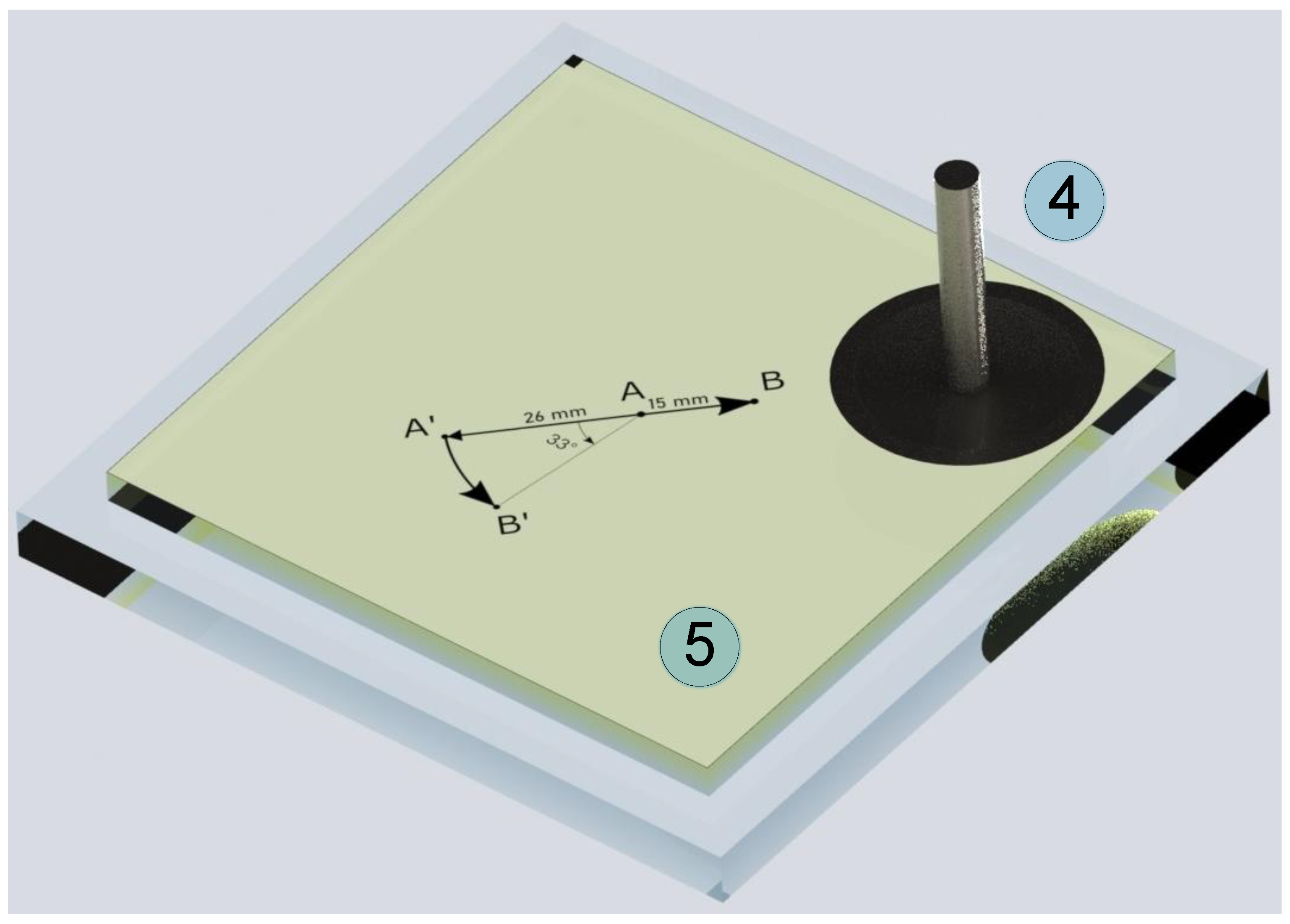
3.2. Techniques of Experimentation
4. Results of Experiments
4.1. Two Scenarios of Contact Loading
- (1)
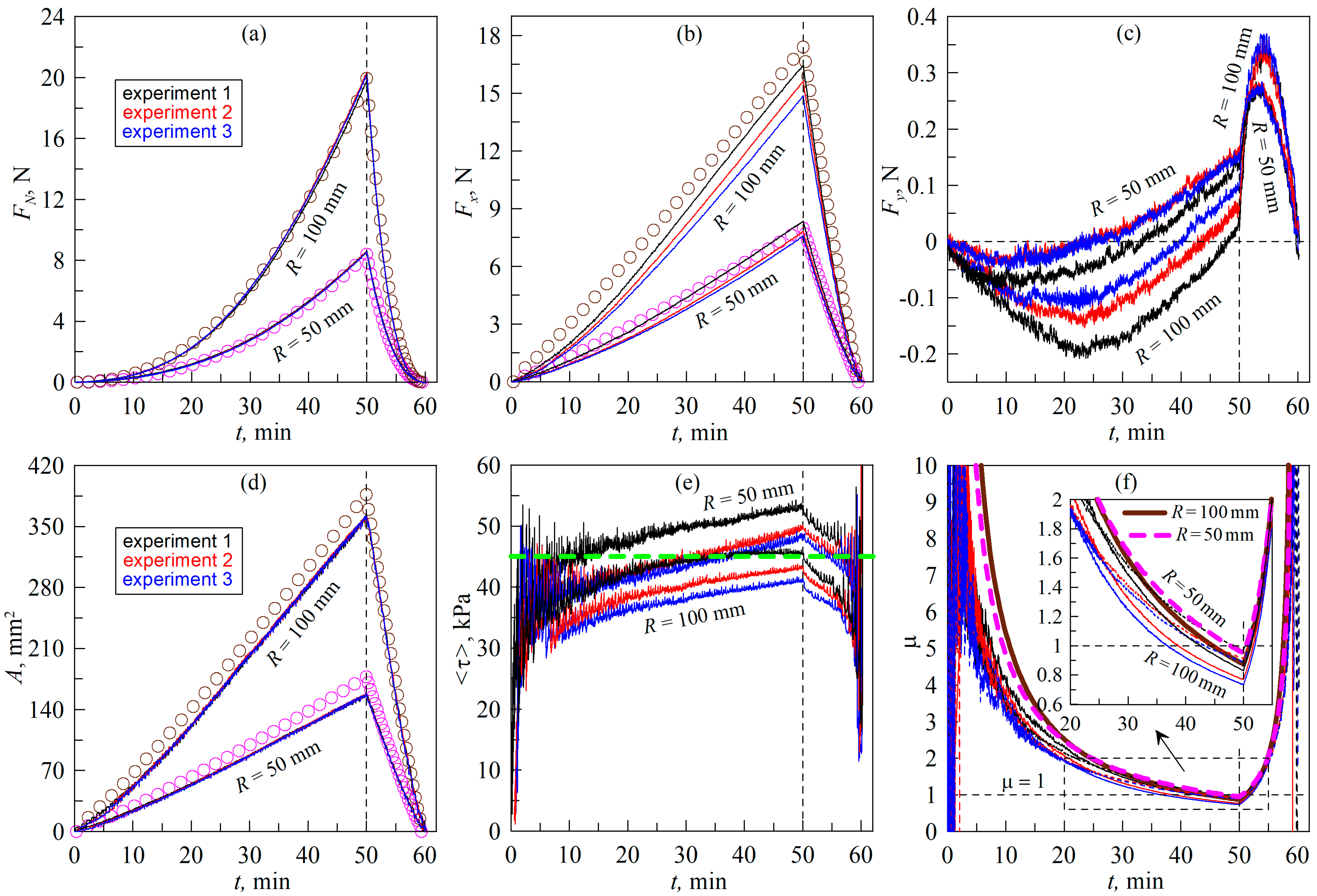
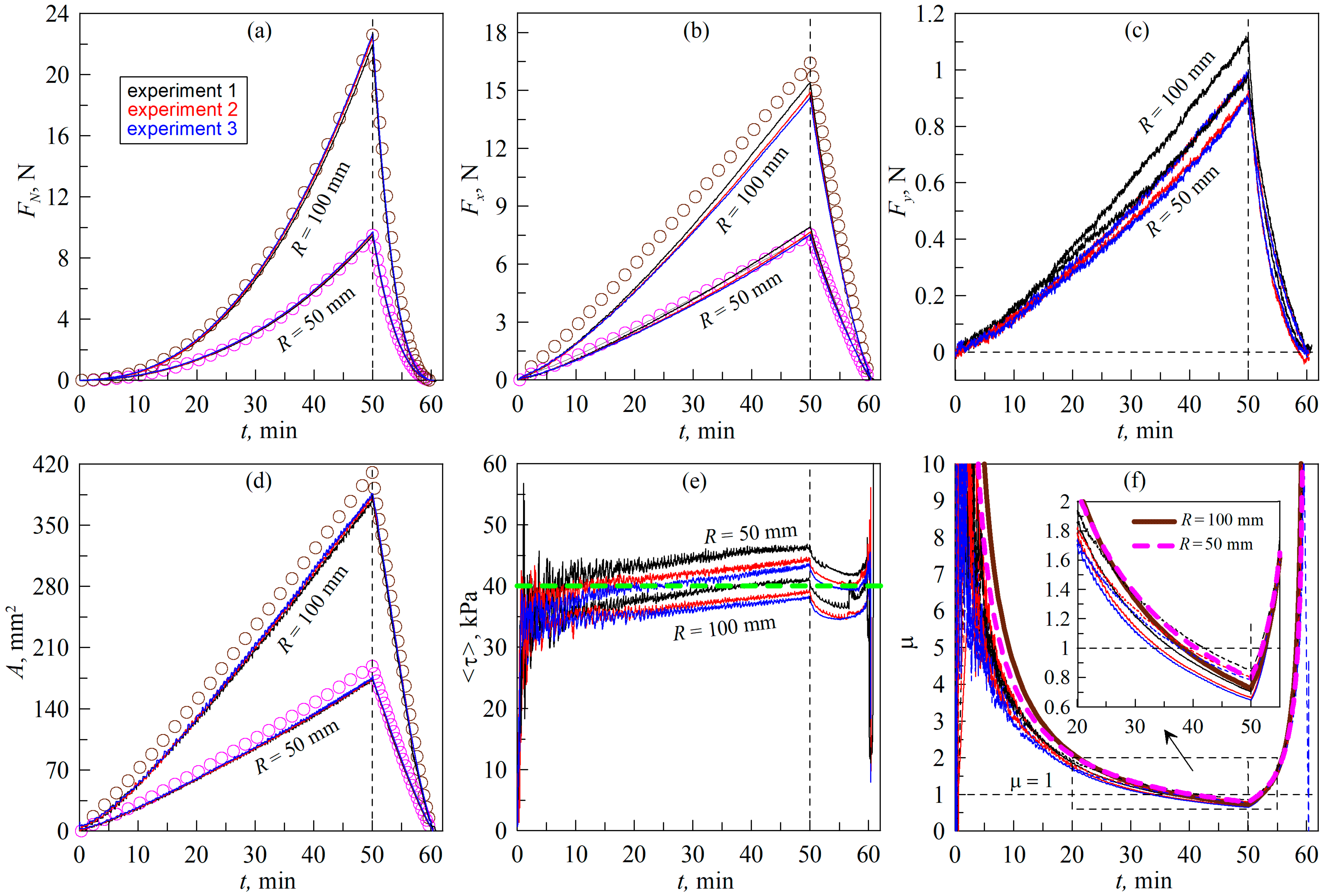
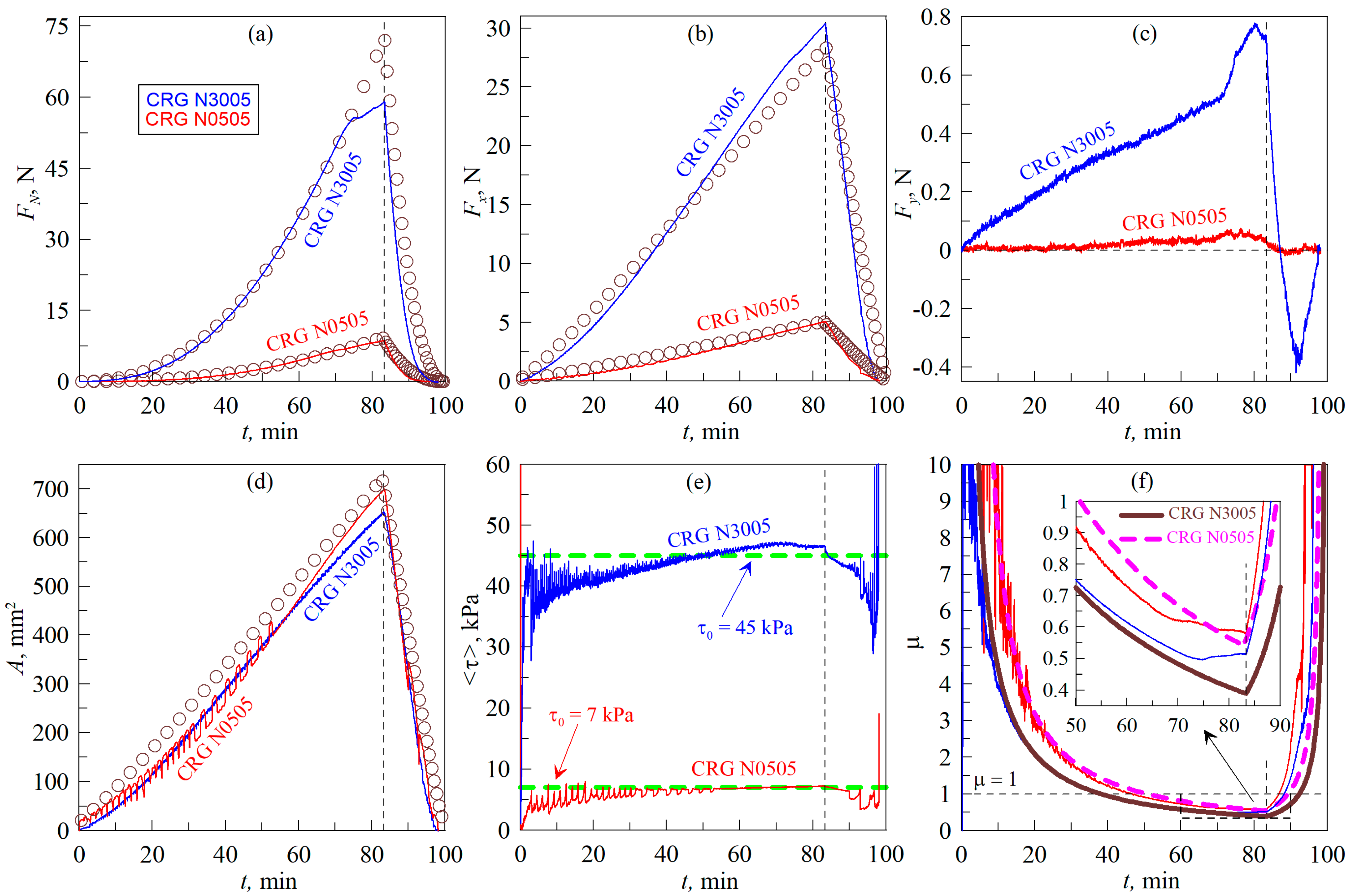
- In the case of the elastomer rotation (Figure 7), the maximum indentation depth (dmax = 0.6 mm) corresponds to a larger normal force (FN) and contact area (A) compared to the case of the tangential indenter movement (Figure 5). This can be explained by the fact that, in the experiment shown in Figure 7, the initial contact of the indenter with the elastomer was carried out in the area where there were no pronounced irregularities. This is confirmed by the fact that the BEM simulation results, shown in Figure 7, also correspond to a maximum depth of dmax = 0.6 mm, while in Figure 5, in the simulation, the maximum depth (dmax) has a smaller value of 0.568 mm (see description of Figure 5 in the text of the paper).
- (2)
- In Figure 7, smaller values of tangential stresses (τ0) are observed. Therefore, the value τ0 = 40 kPa was chosen in the BEM simulation, while in the situation demonstrated in Figure 5, a higher value of τ0 = 45 kPa was used. It is worth noting here that the steady-state value of τ0 may differ slightly in different experiments [29,30] since it depends on the current chemical state of the friction surfaces, which changes with time. Therefore, the existence of such differences is not related to the geometric features of the compared experiments.
- (3)
- The objectively registerable difference between the experiment with rotation of the elastomer (Figure 7) and the experiment with tangential movement of the indenter (Figure 5) is that, in the case of rotation of the elastomer, larger values of the lateral force (Fy) are observed for obvious reasons (see Figure 7c). This causes the direction of the resulting force (Ft) to change, as shown in Figure 6b. However, this fact does not affect the dependence of the friction coefficient μ(t), which is shown in Figure 7f (compare with Figure 5f).
- (4)
- In the experiment with elastomer rotation, visible differences are observed in the contact configuration and in its evolution compared to the experiment using linear motion. These differences can be seen in the Supplementary Videos attached to the article. These differences are also due to the fact that, when the elastomer is rotated, the parts of the indenter that are in contact have different distances from the rotation axis and therefore slide with different linear velocities through the elastomer. The differences in slip velocities can be significant as the contact size increases. This feature opens up the possibility of analyzing the influence of movement velocity on the sliding processes in experiments using a fixed angular velocity for the elastomer. Moreover, rotating contacts are often used in various branches of technology, so such studies are also of practical interest.
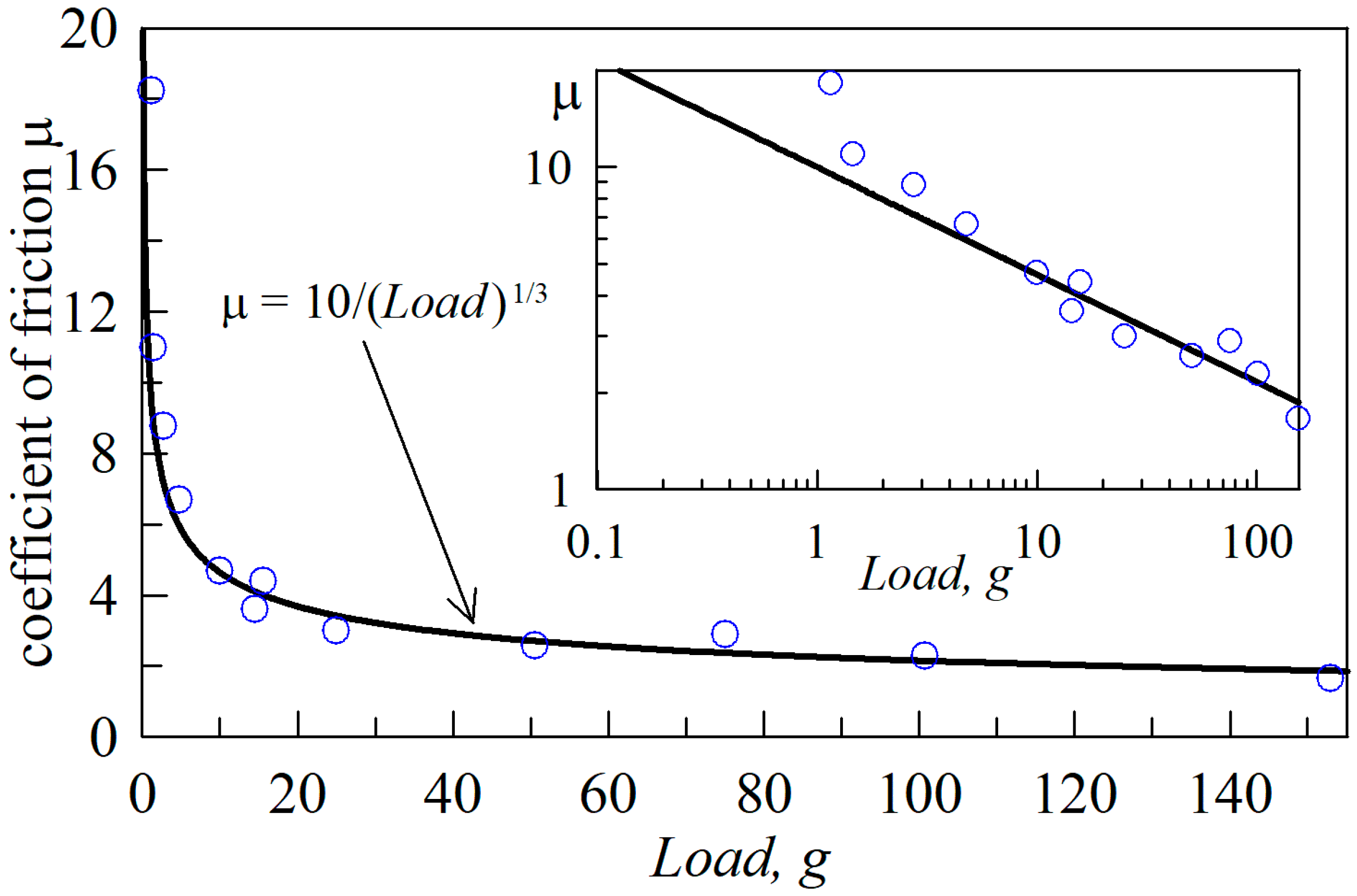
4.2. Friction Coefficient at High Loads
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alberts, B.; Johnson, A.; Lewis, J.; Morgan, D.; Raff, M.; Roberts, K.; Walter, P. Molecular Biology of the Cell, 6th ed.; Garland Science: New York, NY, USA, 2014; ISBN 9780815344322. [Google Scholar]
- Gumbiner, B.M. Cell Adhesion: The Molecular Basis of Tissue Architecture and Morphogenesis. Cell 1996, 84, 345–357. [Google Scholar] [CrossRef]
- Linke, D.; Goldman, A. (Eds.) Bacterial Adhesion—Chemistry, Biology and Physics; Advances in Experimental Medicine and Biology Book Series; AEMB; Springer: Dordrecht, The Netherlands, 2011; Volume 715, p. 374. [Google Scholar] [CrossRef]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 2005, 37, 275–285. [Google Scholar] [CrossRef]
- Lutz, T.M.; Kimna, C.; Casini, A.; Lieleg, O. Bio-based and bio-inspired adhesives from animals and plants for biomedical applications. Mater. Today Bio 2022, 13, 100203. [Google Scholar] [CrossRef] [PubMed]
- Dirks, J.-H.; Federle, W. Fluid-based adhesion in insects—Principles and challenges. Soft Matter 2011, 7, 11047–11053. [Google Scholar] [CrossRef]
- Huber, G.; Mantz, H.; Spolenak, R.; Mecke, K.; Jacobs, K.; Gorb, S.N.; Arzt, E. Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements. Proc. Natl. Acad. Sci. USA 2005, 102, 16293. [Google Scholar] [CrossRef] [PubMed]
- Higham, T.E.; Russell, A.P.; Niewiarowski, P.H.; Wright, A.; Speck, T. The Ecomechanics of Gecko Adhesion: Natural Surface Topography, Evolution, and Biomimetics. Commun. Integr. Biol. 2019, 59, 148–167. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Liu, S.; Liu, J. Insights into adhesion of abalone: A mechanical approach. J. Mech. Behav. 2018, 77, 331–336. [Google Scholar] [CrossRef]
- Xi, P.; Ye, S.; Cong, Q. Abalone adhesion: The role of various adhesion forces and their proportion to total adhesion force. PLoS ONE 2023, 18, e0286567. [Google Scholar] [CrossRef]
- Federle, W.; Labonte, D. Dynamic biological adhesion: Mechanisms for controlling attachment during locomotion. Phil. Trans. R. Soc. 2019, 374, 20190199. [Google Scholar] [CrossRef]
- Wang, Z.; Xing, Q.; Wang, W.; Ji, A.; Dai, Z. Contribution of friction and adhesion to the reliable attachment of a gecko to smooth inclines. Friction 2018, 6, 407–419. [Google Scholar] [CrossRef]
- Jagota, A.; Hui, C.Y. Adhesion, friction, and compliance of bio-mimetic and bio-inspired structured interfaces. Mater. Sci. Eng. R Rep. 2011, 72, 253–292. [Google Scholar] [CrossRef]
- Niederegger, S.; Gorb, S.N. Friction and adhesion in the tarsal and metatarsal scopulae of spiders. J. Comp. Physiol. A 2006, 192, 1223–1232. [Google Scholar] [CrossRef]
- Waters, J.F.; Guduru, P.R. Mode-mixity-dependent adhesive contact of a sphere on a plane surface. Proc. R. Soc. A 2010, 466, 1303–1325. [Google Scholar] [CrossRef]
- Peng, X.; Zhang, Z. Improvement of paint adhesion of environmentally friendly paint film on wood surface by plasma treatment. Prog. Org. Coat. 2019, 134, 255–263. [Google Scholar] [CrossRef]
- Schmitt, P.; Eberlein, D.; Ebert, C.; Tranitz, M.; Eitner, U.; Wirth, H. Adhesion of Al-metallization in Ultra-Sonic Soldering on the Al-Rear Side of Solar Cells. Energy Procedia 2013, 38, 380–386. [Google Scholar] [CrossRef]
- Wang, H.Y.; Liu, L.M. Analysis of the influence of adhesives in laser weld bonded joints. Int. J Adhes. 2014, 52, 77–81. [Google Scholar] [CrossRef]
- Ma, C.; Sun, J.; Li, B.; Feng, Y.; Sun, Y.; Xiang, L.; Wu, B.; Xiao, L.; Liu, B.; Petrovskii, V.S.; et al. Ultra-strong bio-glue from genetically engineered polypeptides. Nat. Commun. 2021, 12, 3613. [Google Scholar] [CrossRef]
- Przywara, M.; Dürr, R.; Otto, E.; Kienle, A.; Antos, D. Process Behavior and Product Quality in Fertilizer Manufacturing Using Continuous Hopper Transfer Pan Granulation-Experimental Investigations. Processes 2021, 9, 1439. [Google Scholar] [CrossRef]
- Pizzi, A.; Mittal, K.L. Handbook of Adhesive Technology, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Derjaguin, B. Molekulartheorie der äußeren Reibung. Z. Physik 1934, 88, 661–675. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L.; Borysiuk, V. Indentation and Detachment in Adhesive Contacts between Soft Elastomer and Rigid Indenter at Simultaneous Motion in Normal and Tangential Direction: Experiments and Simulations. Biomimetics 2023, 8, 477. [Google Scholar] [CrossRef]
- Bowden, F.P.; Tabor, D. The Friction and Lubrication of Solids; Oxford University Press: New York, NY, USA, 1950; p. 337. [Google Scholar]
- Yoshizava, H.; Chen, Y.-L.; Israelachvili, J. Fundamental mechanisms of interfacial friction. 1. Relation between adhesion and friction. J. Phys. Chem. 1993, 97, 4128–4140. [Google Scholar] [CrossRef]
- Ozaki, S.; Mieda, K.; Matsuura, T.; Maegawa, S. Simple Prediction Method for Rubber Adhesive Friction by the Combining Friction Test and FE Analysis. Lubricants 2018, 6, 38. [Google Scholar] [CrossRef]
- Liang, X.M.; Xing, Y.Z.; Li, L.T.; Yuan, W.K.; Wang, G.F. An experimental study on the relation between friction force and real contact area. Sci. Rep. 2021, 11, 20366. [Google Scholar] [CrossRef]
- Otsuki, M.; Matsukawa, H. Systematic Breakdown of Amontons’ Law of Friction for an Elastic Object Locally Obeying Amontons’ Law. Sci. Rep. 2013, 3, 1586. [Google Scholar] [CrossRef] [PubMed]
- Popov, V.L.; Li, Q.; Lyashenko, I.A.; Pohrt, R. Adhesion and friction in hard and soft contacts: Theory and experiment. Friction 2021, 9, 1688–1706. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L. The influence of adhesion on rolling and sliding friction: An experiment. Tech. Phys. 2022, 67, 203–214. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L.; Borysiuk, V. Experimental Verification of the Boundary Element Method for Adhesive Contacts of a Coated Elastic Half-Space. Lubricants 2023, 11, 84. [Google Scholar] [CrossRef]
- McFarlane, J.S.; Tabor, D. Relation between friction and adhesion. Proc. R. Soc. Lond. A 1950, 202, 244–253. [Google Scholar] [CrossRef]
- Homola, A.M.; Israelachvili, J.N.; McGuiggan, P.M.; Gee, M.L. Fundamental experimental studies in tribology: The transition from “interfacial” friction of undamaged molecularly smooth surfaces to “normal” friction with wear. Wear 1990, 136, 65–83. [Google Scholar] [CrossRef]
- Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. A 1971, 324, 301–313. [Google Scholar] [CrossRef]
- Hertz, H. Ueber die Berührung fester elastischer Körper. J. Reine Angew. Math. 1881, 92, 156–171. [Google Scholar] [CrossRef]
- Popov, V.L.; Hess, M. Method of dimensionality reduction in contact mechanics and friction: A users handbook. I. Axially-Symmetric Contacts. Facta Univ. Ser. Mech. Eng. 2014, 12, 1–14. [Google Scholar]
- Davis, P.J. Leonhard Euler’s Integral: A Historical Profile of the Gamma Function. Am. Math. Mon. 1959, 66, 849–869. [Google Scholar] [CrossRef]
- Roberts, E.W. Ultralow friction films of MoS2 for space applications. Thin Solid Films 1989, 181, 461–473. [Google Scholar] [CrossRef]
- Martin, J.-M. 13—Superlubricity of Molybdenum Disulfide. In Superlubricity; Erdemir, A., Martin, J.-M., Eds.; Elsevier: Amsterdam, The Netherlands, 2007; pp. 207–225. ISBN 978-0-444-52772-1. [Google Scholar] [CrossRef]
- Müser, M.H. Theoretical Studies of Superlubricity. In Fundamentals of Friction and Wear on the Nanoscale; Gnecco, E., Meyer, E., Eds.; NanoScience and Technology; Springer: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L.; Pohrt, R.; Borysiuk, V. High-Precision Tribometer for Studies of Adhesive Contacts. Sensors 2023, 23, 456. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L. Hysteresis in an adhesive contact upon a change in the indenter direction of motion: An experiment and phenomenological model. Tech. Phys. 2021, 66, 672–690. [Google Scholar] [CrossRef]
- Pohrt, R. Friction Influenced by Vibrations: A Refined Contact-Mechanics View on Lateral and Rotational Oscillations. Front. Mech. Eng. 2020, 6, 566440. [Google Scholar] [CrossRef]
- Li, Q.; Pohrt, R.; Lyashenko, I.A.; Popov, V.L. Boundary element method for nonadhesive and adhesive contacts of a coated elastic half-space. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 73–83. [Google Scholar] [CrossRef]
- Greenwood, J.A. Reflections on and Extensions of the Fuller and Tabor Theory of Rough Surface Adhesion. Tribol. Lett. 2017, 65, 159. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Popov, V.L. The effect of contact duration and indentation depth on adhesion strength: Experiment and numerical simulation. Tech. Phys. 2020, 65, 1695–1707. [Google Scholar] [CrossRef]
- Lyashenko, I.A.; Pohrt, R. Adhesion between rigid indenter and soft rubber layer: Influence of roughness. Front. Mech. Eng. 2020, 6, 49. [Google Scholar] [CrossRef]
- Schallamach, A. How does rubber slide? Wear 1971, 17, 301–312. [Google Scholar] [CrossRef]
- Barquins, M. Sliding Friction of Rubber and Schallamach Waves—A Review. Mater. Sci. Eng. 1985, 73, 45–63. [Google Scholar] [CrossRef]
- Chen, Z. Friction Reduction Effect of Soft Coatings. J. Tribol. 2019, 141, 104501. [Google Scholar] [CrossRef]
- Nasir, R.M.; El-Tayeb, N.S.M. Surface morphology, mechanical and tribological properties of blended deproteinized natural and polyisoprene rubbers. J. Thermoplast. Compos. Mater. 2011, 25, 701–715. [Google Scholar] [CrossRef]
- Merkher, Y.; Sivan, S.; Etison, I.; Maroudas, A.; Halperin, G.; Yosef, A. A rational friction test using human cartilageon-cartilage arrangement. In Proceedings of the AITC-AIT 2006 International Conference on Tribology, Parma, Italy, 20–22 September 2006. [Google Scholar]
- Naveen, G.J.; SampathKumaran, P.; Badrinath, P.; Vynatheya, S.; Sailaja, R.R.N.; Seetharamu, S.; Deepthi, M.V.; Niranjan, H.B. Role of Graphene oxide and addition of MoS2 in HDPE matrix for improved tribological properties. IOP Conf. Ser. Mater. Sci. Eng. 2018, 376, 012077. [Google Scholar] [CrossRef]
- Tyagi, R.; Nath, S.K.; Ray, S. Effect of martensite content on friction and oxidative wear behavior of 0.42 Pct carbon dual-phase steel. Metall. Mater. Trans. A 2002, 33, 3479–3488. [Google Scholar] [CrossRef]
- Nabhan, A.; El-Sharkawy, M.R.; Ali, W.Y. Proper Selection of Floor Materials for Wheelchair Users. In Proceedings of the New Vision to Challenge Disabilities International Conference, Minia University, Minya, Egypt, March 2017; Available online: https://www.researchgate.net/publication/319141404 (accessed on 31 December 2023).
- Sun, K.; Peng, W.; Wei, B.; Yang, L.; Fang, L. Friction and Wear Characteristics of 18Ni(300) Maraging Steel under High-Speed Dry Sliding Conditions. Materials 2020, 13, 1485. [Google Scholar] [CrossRef] [PubMed]
- Voyer, J.; Ausserer, F.; Klien, S.; Velkavrh, I.; Diem, A. Reduction of the Adhesive Friction of Elastomers through Laser Texturing of Injection Molds. Lubricants 2017, 5, 45. [Google Scholar] [CrossRef]
- Santra, T.S.; Bhattacharyya, T.K.; Tseng, F.G.; Barik, T.K. Diamond-Like Nanocomposite (DLN) Films for Microelectro-Mechanical System (MEMS). In Proceedings of the IJCA International Symposium on Devices MEMS, Intelligent Systems & Communication (ISDMISC), Gangtok, India, 12–14 April 2011; Volume 6, pp. 6–9. Available online: https://www.researchgate.net/publication/267610153 (accessed on 31 December 2023).
- Duan, Y.; Qu, S.; Yang, C.; Li, X.; Liu, F. Drop Tower Experiment to Study the Effect of Microgravity on Friction Behavior: Experimental Set-up and Preliminary Results. Microgravity Sci. Technol. 2020, 32, 1095–1104. [Google Scholar] [CrossRef]
- Doaa, G.Z.; Meshref, A.A.; Mazen, A.A. Friction and wear of epoxy reinforced by iron nano particles. EGTRIB J. J. Egypt. Soc. Tribol. 2018, 15, 71–79. [Google Scholar]
- Fagiani, R.; Massi, F.; Chatelet, E.; Costes, J.P.; Berthier, Y. Contact of a Finger on Rigid Surfaces and Textiles: Friction Coefficient and Induced Vibrations. Tribol. Lett. 2012, 48, 145–158. [Google Scholar] [CrossRef]
- Nijjar, S.; Sudhakara, P.; Sharma, S.; Saini, S.; Teklemariam, A.; Mariselvam, V.; Sampath, S.K.; Song, J.I. Influence of Alkali Treatment and Maleated Polypropylene (MAPP) Compatibilizer on the Dry-Sliding Wear and Frictional Behavior of Borassus Fruit Fine Fiber (BFF)/Polypropylene (PP) Polymer Composites for Various Engineering Applications. Adv. Mater. Sci. Eng. 2021, 2021, 5822245. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyashenko, I.A.; Pham, T.H.; Popov, V.L. Effect of Indentation Depth on Friction Coefficient in Adhesive Contacts: Experiment and Simulation. Biomimetics 2024, 9, 52. https://doi.org/10.3390/biomimetics9010052
Lyashenko IA, Pham TH, Popov VL. Effect of Indentation Depth on Friction Coefficient in Adhesive Contacts: Experiment and Simulation. Biomimetics. 2024; 9(1):52. https://doi.org/10.3390/biomimetics9010052
Chicago/Turabian StyleLyashenko, Iakov A., Thao H. Pham, and Valentin L. Popov. 2024. "Effect of Indentation Depth on Friction Coefficient in Adhesive Contacts: Experiment and Simulation" Biomimetics 9, no. 1: 52. https://doi.org/10.3390/biomimetics9010052
APA StyleLyashenko, I. A., Pham, T. H., & Popov, V. L. (2024). Effect of Indentation Depth on Friction Coefficient in Adhesive Contacts: Experiment and Simulation. Biomimetics, 9(1), 52. https://doi.org/10.3390/biomimetics9010052