
The Effect of Spanwise Folding on the Aerodynamic Performance of a Passively Deformed Flapping Wing


Abstract
1. Introduction
2. Theoretical Methods
2.1. Aerodynamic Model
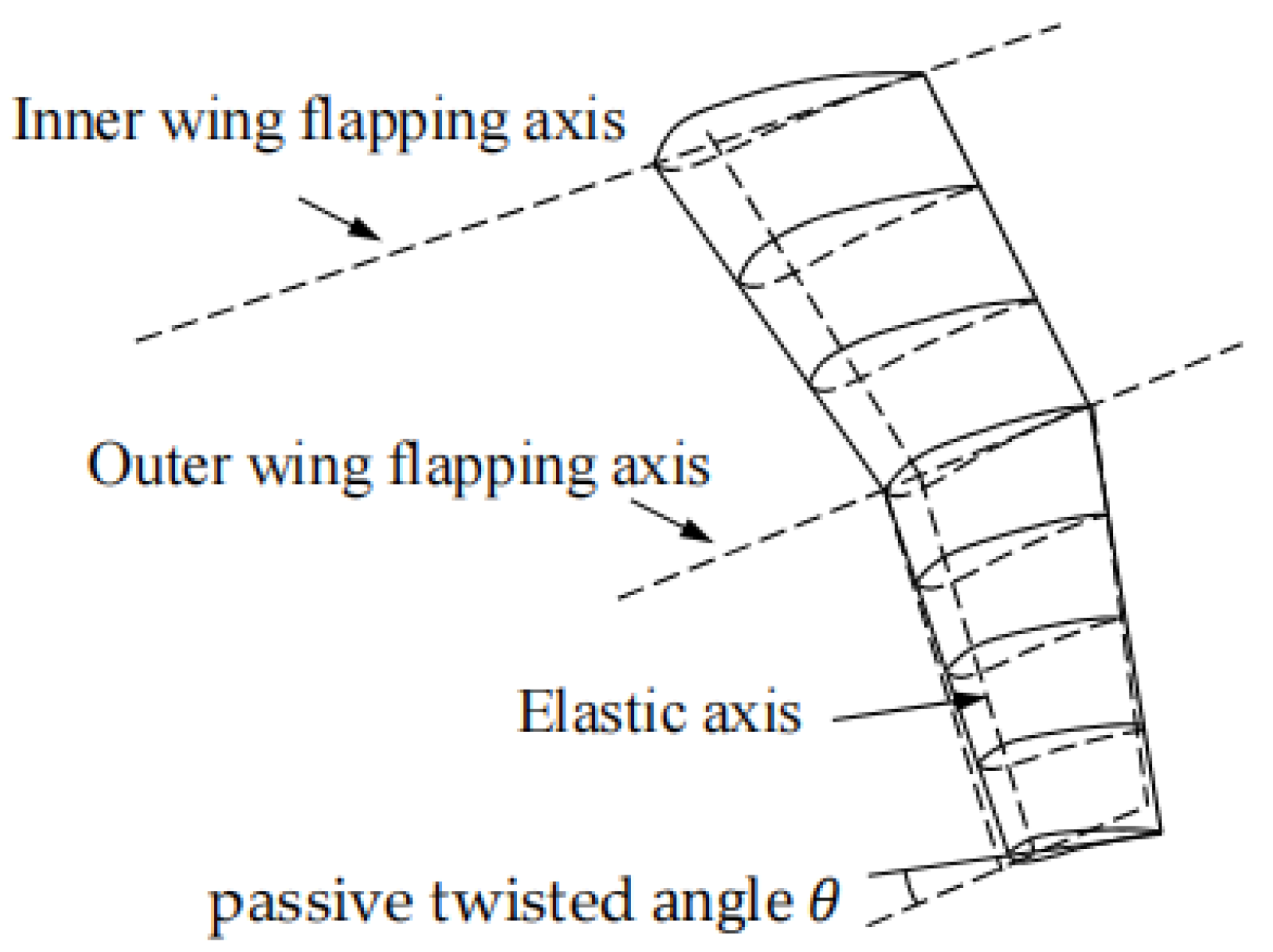
2.2. Structural Model
2.3. Aeroelastic Coupling
2.4. Performance Parameters
2.5. Solver Validation
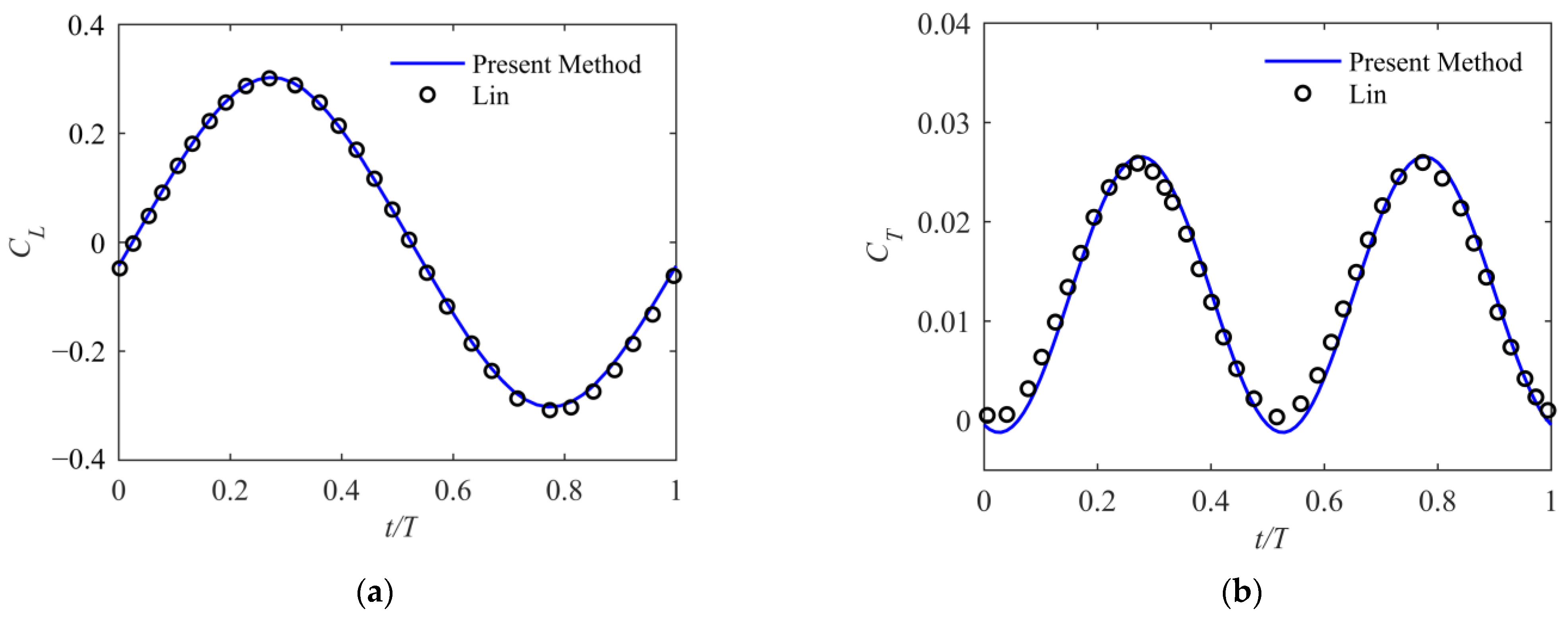
2.5.1. Aerodynamic Force
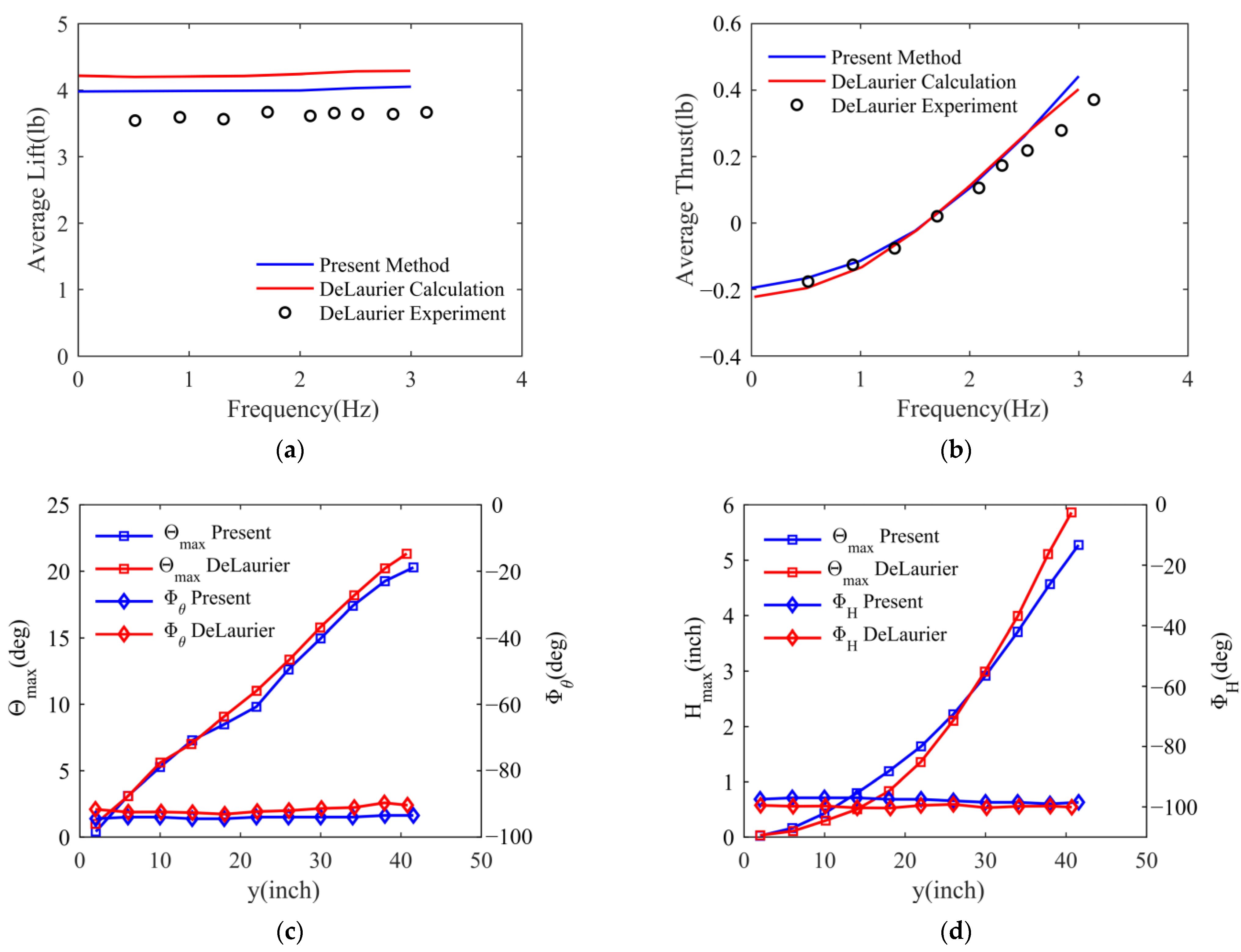
2.5.2. Fluid–Structure Coupling
3. Wing Model
3.1. Wing Calculation Model
3.2. Structural and Kinematic Parameters
4. Results and Discussion
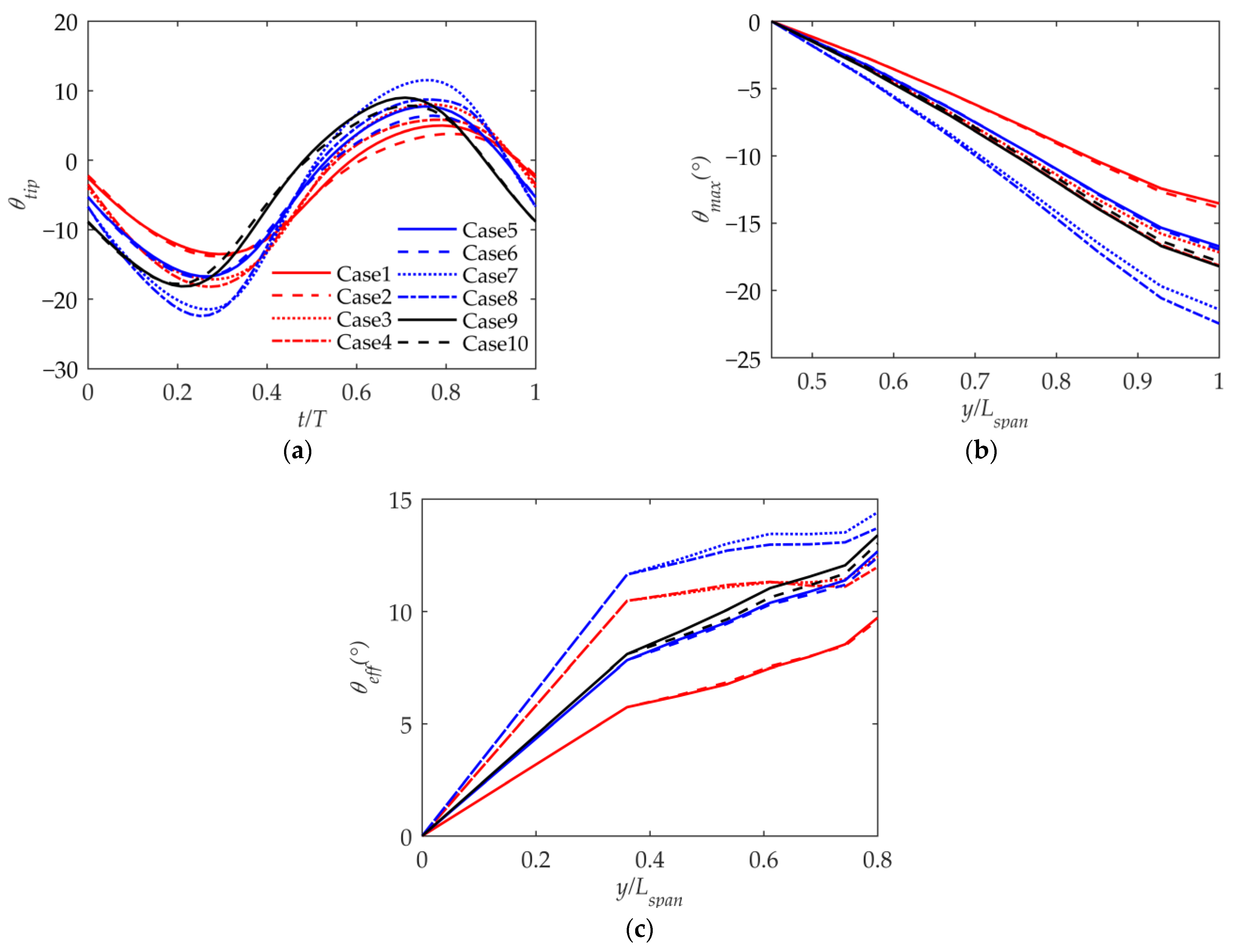
4.1. Kinematic Analysis
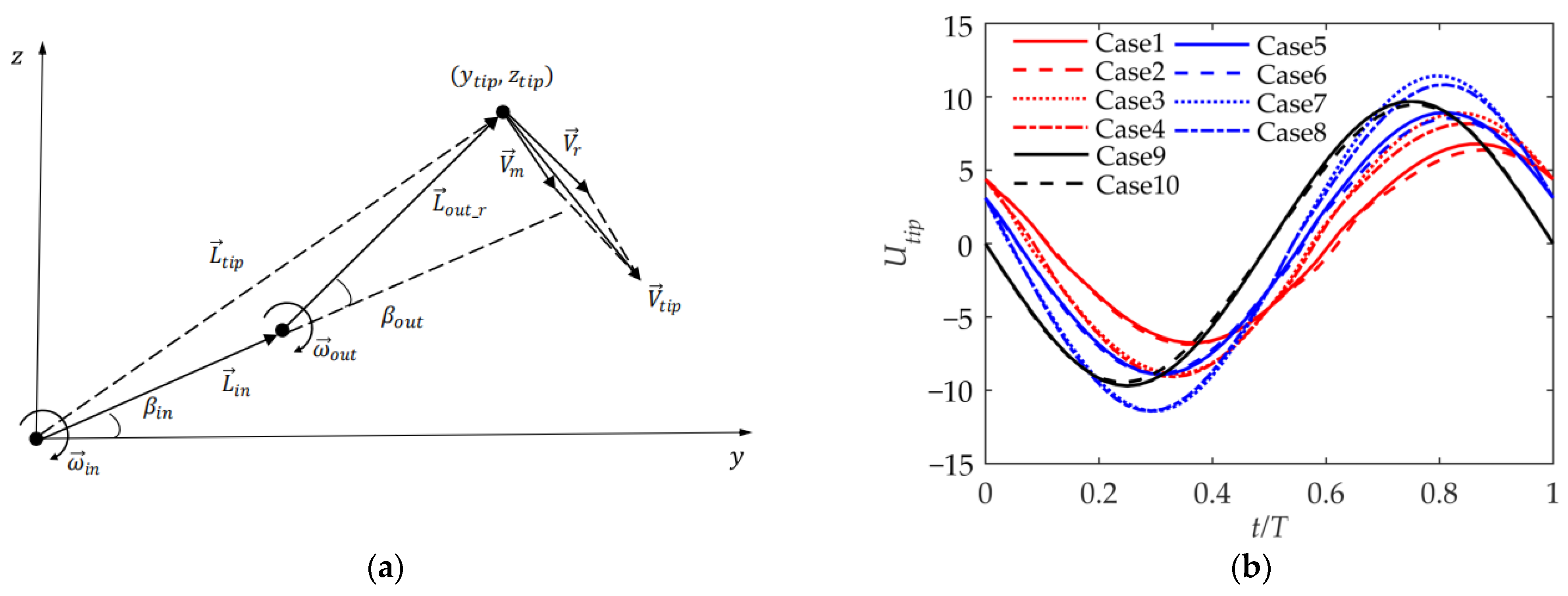
4.1.1. Flapping Trajectory of the Folding Flapping Wing
4.1.2. Velocity of Wing Tip
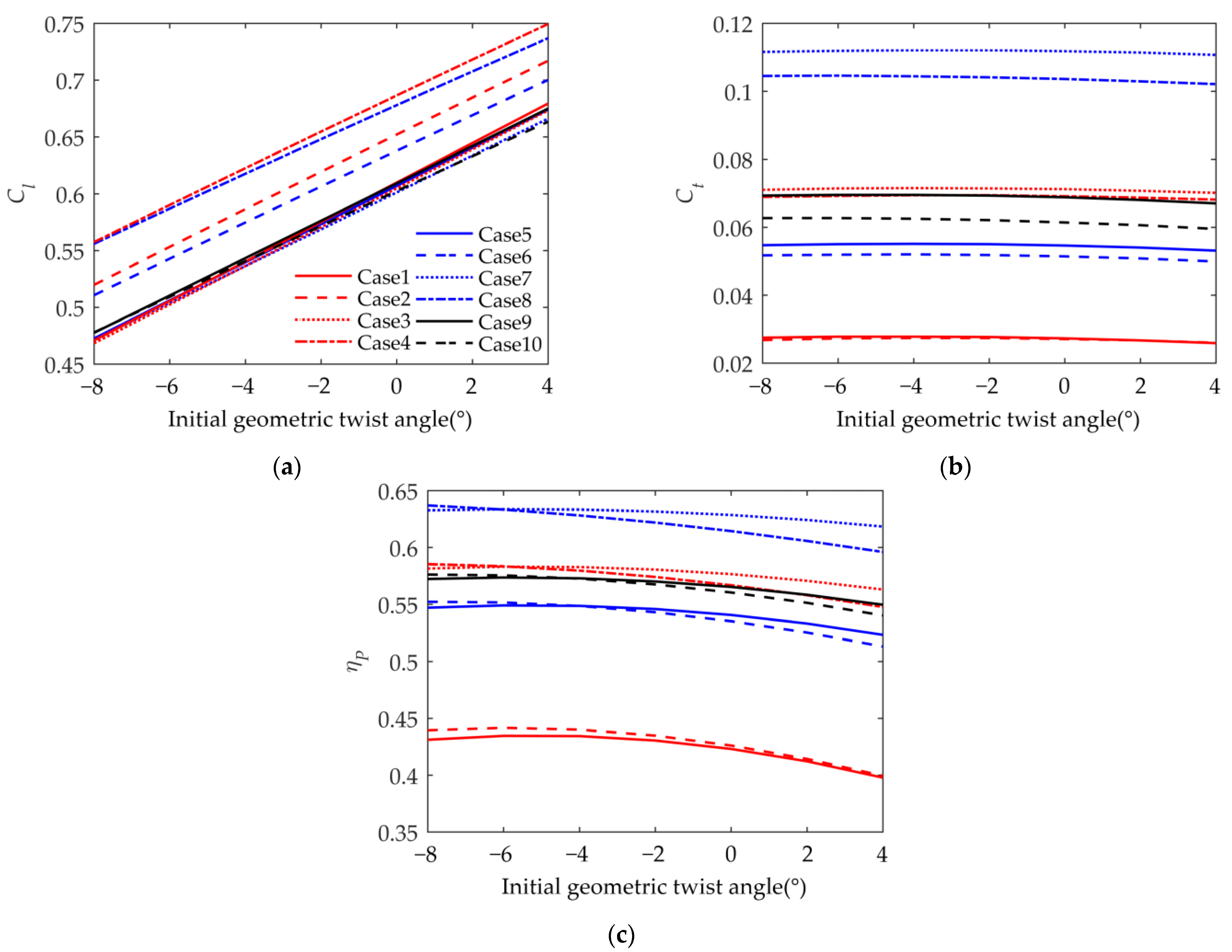
4.2. Aerodynamic Performance
4.3. Parameters within a Cycle
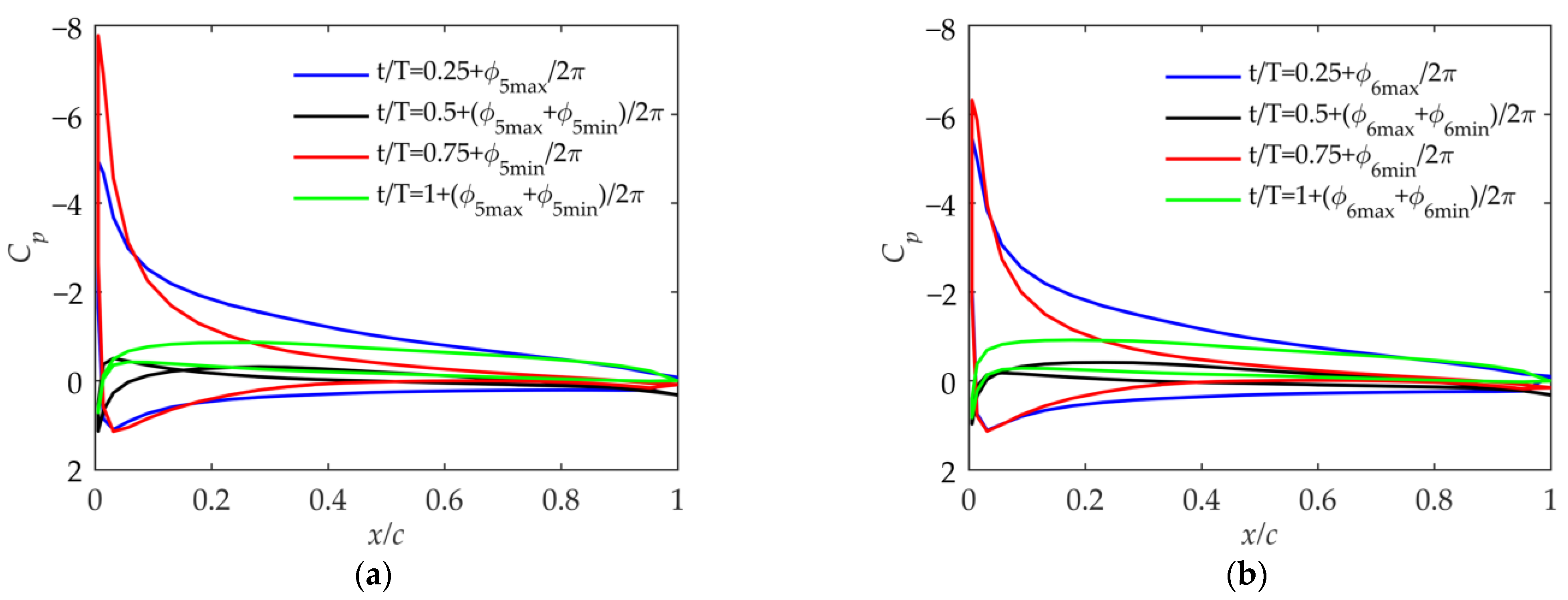
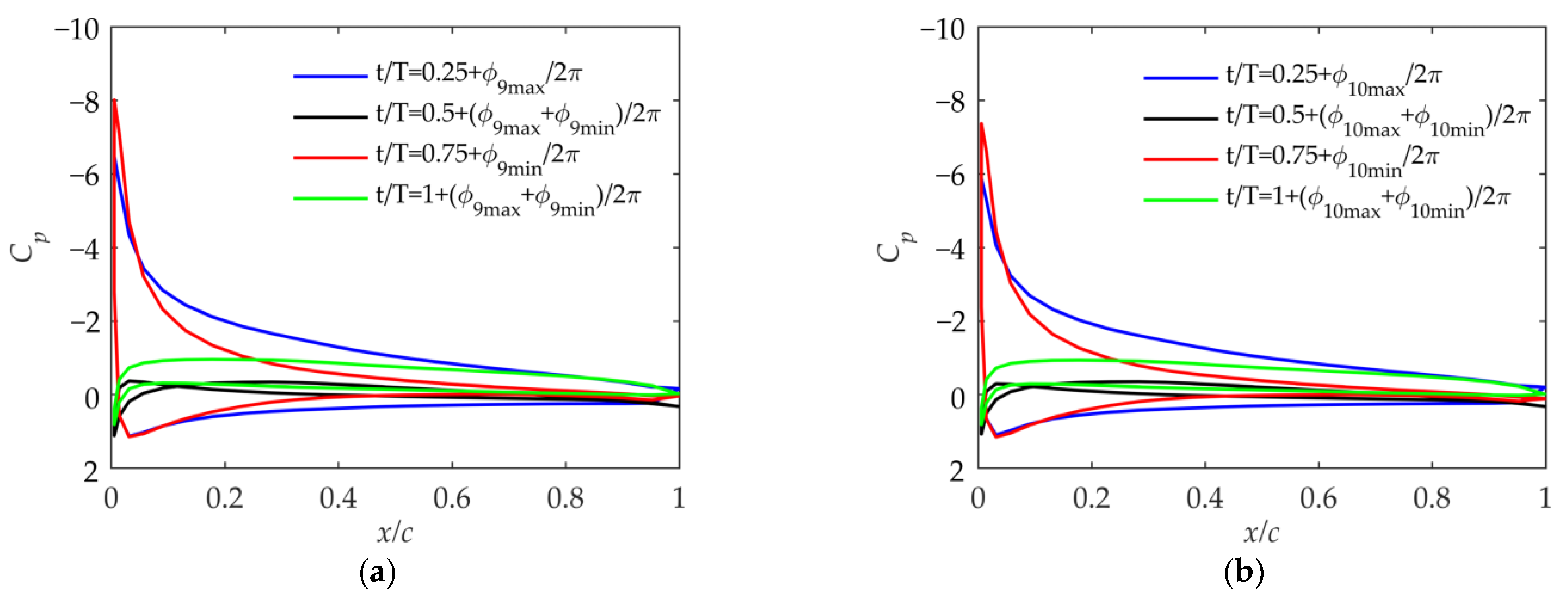
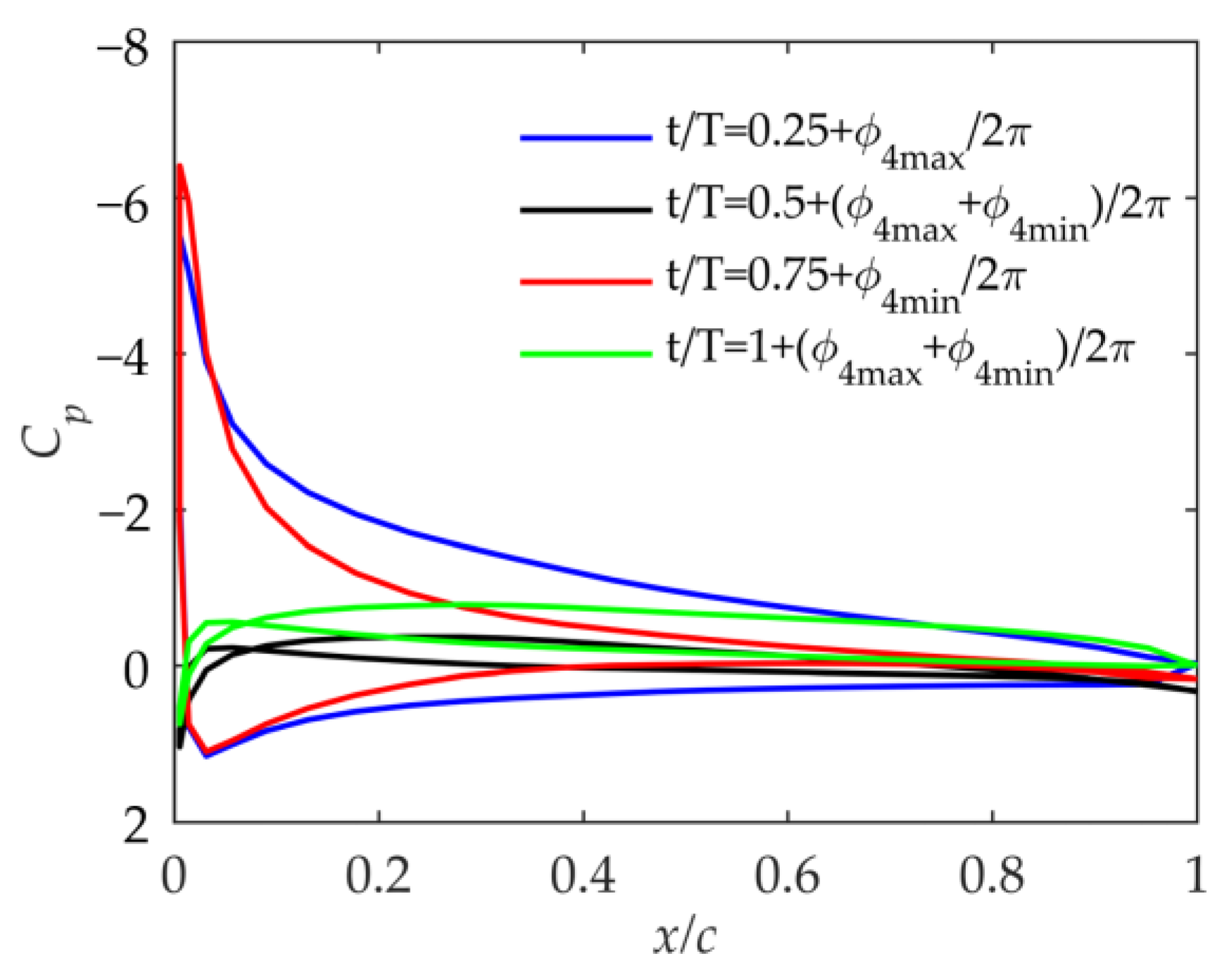
4.4. Pressure Coefficient
5. Conclusions
- Kinematic parameters significantly impact performance. The flapping phase angle between the inner and outer wings affects the movement velocity of the outer wing. A larger implies a smaller flapping velocity for the outer wing, resulting in a smaller thrust coefficient and a more pronounced lag in the lift coefficient phase. A Larger also indicates asymmetry in the flapping trajectory.
- The average folding angle significantly influences the lift coefficient as it impacts the trajectory of the flapping wing. When is positive, the folding motion is noticeable during the upward-flapping process, resulting in small lift loss and, consequently, a larger lift coefficient during this phase. It has a minor impact on the thrust coefficient and propulsion efficiency but greatly affects the effective angle of attack of the outer wing. should be designed to align with the initial geometric twist angle. Otherwise, the airfoil’s angle of attack throughout the period might become excessive, leading to severe airflow separation and reduced propulsion efficiency.
- The flapping angle of the inner wing primarily influences the overall wing’s unsteadiness. An increase in results in an elevation in the thrust coefficient, but it may lead to an excessive effective angle of attack for the outer wing, reducing the propulsion efficiency.
- For folding flapping wings, there are principles for selecting kinematic parameters. From the perspective of the lift coefficient, the folding motion should be applied to reduce lift loss during the upward-flapping phase. The configuration of the wing during the period should be asymmetrical, and a large flapping phase angle and a positive average folding angle should be selected. Regarding the thrust coefficient and propulsion efficiency, the generation of thrust should be concentrated in the downward-flapping phase when the lift-to-drag ratio is high. So, a positive should be selected. The inner wing flapping angle can adjust the overall unsteadiness of the wing and the thrust. The initial geometric twist angle can be matched with the average folding angle to maintain the airfoil’s effective angle of attack within a reasonable range during upward and downward flapping.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| lift coefficient of the wing | |
| thrust coefficient of the wing | |
| pressure coefficient | |
| propulsion efficiency of the wing | |
| flapping angle of inner wing | |
| flapping angle of outer wing | |
| flapping amplitude of the inner wing | |
| flapping amplitude of the outer wing | |
| mean folding angle | |
| flapping velocity of the wing tip | |
| GJ | torsional stiffnesses of the beam |
| EI | bending stiffnesses of the beam |
| phase difference between the flapping angles of the inner and outer wings | |
| phase angle deviations relative to the inner wing flapping angle at maximum lift coefficient point | |
| phase angle deviations relative to the inner wing flapping angle at maximum lift coefficient point | |
| initial geometric twist angle of the wing | |
| effective angle of attack of wing | |
| maximum twisting angle of the wing | |
| passive twisting angle of the wing tip | |
| flapping elastic amplitude of the wing | |
| phase angles between twisting angle and flapping motion | |
| phase angles between bending response and flapping motion | |
| velocity potential of the upper surface of the trailing edge | |
| velocity potential of the upper surface of the trailing edge | |
| k | reduced frequency |
| Strouhal number |
References
- Shyy, W.; Aono, H.; Kang, C. An Introduction to Flapping Wing Aerodynamics; Cambridge University Press: Cambridge, UK, 2013; pp. 27–29. [Google Scholar]
- Tobalske, B.; Dial, K. Flight Kinematics of Black-Billed Magpies and Pigeons Over a Wide Range of Speeds. J. Exp. Biol. 1996, 199, 263–280. [Google Scholar] [CrossRef] [PubMed]
- Shyy, W.; Berg, M.; Ljungqvist, D. Flapping and flexible wings for biological and micro air vehicles. Prog. Aerosp. Sci. 1999, 35, 455–505. [Google Scholar] [CrossRef]
- Send, W.; Fischer, M.; Jebens, K.; Mugrauer, R.; Nagarathinam, A.; Scharstein, F. Artificial hinged-wing bird with active torsion and partially linear kinematics. In Proceeding of 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Kim, S.; Kim, M.; Kim, S.; Suk, J. Design, fabrication, and flight test of articulated ornithopter. In Proceedings of the 10th International Micro Air Vehicles Conference, Melbourne, Australia, 22–23 November 2018; pp. 1–6. [Google Scholar]
- Huang, M. Optimization of flapping wing mechanism of bionic eagle. Proc. Inst. Mech. Eng. 2019, 233 Pt G, 3260. [Google Scholar] [CrossRef]
- Han, C. Investigation of unsteady aerodynamic characteristics of a seagull wing in level flight. J. Bionic. Eng. 2009, 6, 408–414. [Google Scholar] [CrossRef]
- Yang, H.H.; Lee, S.G.; Addo-Akoto, R.; Han, J.H. Parameter Optimization of Foldable Flapping-Wing Mechanism for Maximum Lift. J. Mech. Robot. 2024, 16, 031002. [Google Scholar] [CrossRef]
- Karimian, S.; Jahanbin, Z. Bond graph modeling of a typical flapping wing micro-air-vehicle with the elastic articulated wings. Meccanica 2020, 55, 1263–1294. [Google Scholar] [CrossRef]
- Verstraete, M.L.; Preidikman, S.; Roccia, B.A.; Mook, D.T. A numerical model to study the nonlinear and unsteady aerodynamics of bioinspired morphing-wing concepts. Int. J. Micro Air Veh. 2015, 7, 327–345. [Google Scholar] [CrossRef]
- Chang, X.; Zhang, L.; Ma, R.; Wang, N. Numerical investigation on aerodynamic performance of a bionic flapping wing. Appl. Math. Mech. 2019, 40, 1625–1646. [Google Scholar] [CrossRef]
- Lang, X.; Song, B.; Yang, W.; Yang, X. Effect of spanwise folding on the aerodynamic performance of three dimensional flapping flat wing. Phys. Fluids. 2022, 34, 021906. [Google Scholar] [CrossRef]
- Bie, D.; Li, D.; Li, H.; Kan, Z.; Tu, Z. Analytical study on lift performance of a bat-inspired foldable flapping wing: Effect of wing arrangement. Aerospace 2022, 9, 653. [Google Scholar] [CrossRef]
- Ryu, S.W.; Lee, J.G.; Kim, H.J. Design, fabrication, and analysis of flapping and folding wing mechanism for a robotic bird. J. Bionic Eng. 2020, 17, 229. [Google Scholar] [CrossRef]
- Chen, W.H.; Yeh, S.I. Aerodynamic effects on an emulated hovering passerine with different wing-folding amplitudes. Bioinspir. Biomim. 2021, 16, 046011. [Google Scholar] [CrossRef] [PubMed]
- Qin, S.; Weng, Z.; Li, Z.; Xiang, Y.; Liu, H. On the controlled evolution for wingtip vortices of a flapping wing model at bird scale. Aerosp. Sci. Technol. 2021, 110, 106460. [Google Scholar] [CrossRef]
- Winslow, J.; Otsuka, H.; Govindarajan, B.; Chopra, I. Basic understanding of airfoil characteristics at low Reynolds numbers (104–105). J. Aircr. 2018, 55, 1050–1061. [Google Scholar] [CrossRef]
- Vest, M.S. Unsteady Aerodynamics and Propulsive Characteristics of Flapping Wings with Applications to Avian Flight. Ph.D. Thesis, University of California, San Diego, CA, USA, 1996. [Google Scholar]
- Magnus, A.E.; Epton, M.A. PAN AIR A Computer Program for Predicting Subsonic or Supersonic Linear Potential Flows About Arbitrary Configurations Using a Higher Order Panel Method. Volume 1: Theory Document (Version 1.1); Technical Report No. NASA-CR-3251; NASA: Washington, DC, USA, 1981.
- Ashby, D.L. Potential Flow Theory and Operation Guide for the Panel Code PMARC; Technical Report No. A-00V0005; NASA: Washington, DC, USA, 1999.
- Maskew, B. Program VSAERO Theory Document: A Computer Program for Calculating Nonlinear Aerodynamic Characteristics of Arbitrary Config Urations; Technical Report No. NASA 1.26: 4023; NASA: Washington, DC, USA, 1987.
- Johnson, F.T. A General Panel Method for the Analysis and Design of Arbitrary Configurations in Incompressible Flows; Technical Report No. NASA-CR-3079; NASA: Washington, DC, USA, 1980.
- Hess, J.L. Calculation of Potential Flow about Arbitrary Three-Dimensional Lifting Bodies; Technical Report No. MDC J5679-01; Douglas Aircraft Company: Long Beach, CA, USA, 1972. [Google Scholar]
- Reichert, T. Kinematic Optimization In birds, Bats and Ornithopters. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2011. [Google Scholar]
- Willis, D.J. An Unsteady, Accelerated, High Order Panel Method with Vortex Particle Wakes. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2006. [Google Scholar]
- Qi, M.; Zhu, W.; Li, S. The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing. Aerospace 2023, 10, 1035. [Google Scholar] [CrossRef]
- Larijani, R.F.; DeLaurier, J.D. A Nonlinear Aeroelastic Model for the Study of Flapping Wing Flight. In Fixed and Flapping Wing Aerodynamics for Micro Aerial Vehicle Applications; Mueller, T.J., Ed.; AIAA: Reston, VA, USA, 2001; pp. 399–428. [Google Scholar]
- Teng, N.H. The Development of a Computer Code (U2DIIF) for the Numerical Solution of Unsteady, Inviscid and Incompressible Flow over an Airfoil. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 1987. [Google Scholar]
- Lin, S.Y.; Hu, J.J. Aerodynamic performance study of flapping-wing flow fields. In Proceedings of the 23rd AIAA Applied Aerodynamics Conference, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- DeLaurier, J.D. The development of an efficient ornithopter wing. Aeronaut. J. 1993, 97, 153–162. [Google Scholar] [CrossRef]
- Anderson, J.M.; Streitlien, K.; Barrett, D.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Case 2 | Case 3 | Case 4 | |
| Case 5 | Case 6 | Case 7 | Case 8 | |
| Case 9 | Case 10 |
| Case 1 −4 | Case 2 −4 | Case3 −4 | Case 4 −4 | Case 5 −4 | Case 6 −4 | Case 7 −4 | Case 8 −4 | Case 9 −4 | Case 10 −4 | Case 4 −7 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.540 | 0.586 | 0.536 | 0.623 | 0.540 | 0.575 | 0.536 | 0.618 | 0.543 | 0.541 | 0.575 | |
| 0.0278 | 0.0274 | 0.0715 | 0.0694 | 0.0551 | 0.0520 | 0.112 | 0.104 | 0.0695 | 0.0625 | 0.0691 | |
| 0.431 | 0.435 | 0.581 | 0.574 | 0.546 | 0.543 | 0.632 | 0.622 | 0.570 | 0.568 | 0.584 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, M.; Ding, M.; Zhu, W.; Li, S. The Effect of Spanwise Folding on the Aerodynamic Performance of a Passively Deformed Flapping Wing. Biomimetics 2024, 9, 42. https://doi.org/10.3390/biomimetics9010042
Qi M, Ding M, Zhu W, Li S. The Effect of Spanwise Folding on the Aerodynamic Performance of a Passively Deformed Flapping Wing. Biomimetics. 2024; 9(1):42. https://doi.org/10.3390/biomimetics9010042
Chicago/Turabian StyleQi, Ming, Menglong Ding, Wenguo Zhu, and Shu Li. 2024. "The Effect of Spanwise Folding on the Aerodynamic Performance of a Passively Deformed Flapping Wing" Biomimetics 9, no. 1: 42. https://doi.org/10.3390/biomimetics9010042
APA StyleQi, M., Ding, M., Zhu, W., & Li, S. (2024). The Effect of Spanwise Folding on the Aerodynamic Performance of a Passively Deformed Flapping Wing. Biomimetics, 9(1), 42. https://doi.org/10.3390/biomimetics9010042