


An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs


 ,
,
Abstract
:1. Introduction
- The trotting speed can be controlled. The fastest trotting speed can reach 23 cm/s (0.9 body length/s), which is one of the fastest untethered terrestrial soft robots.
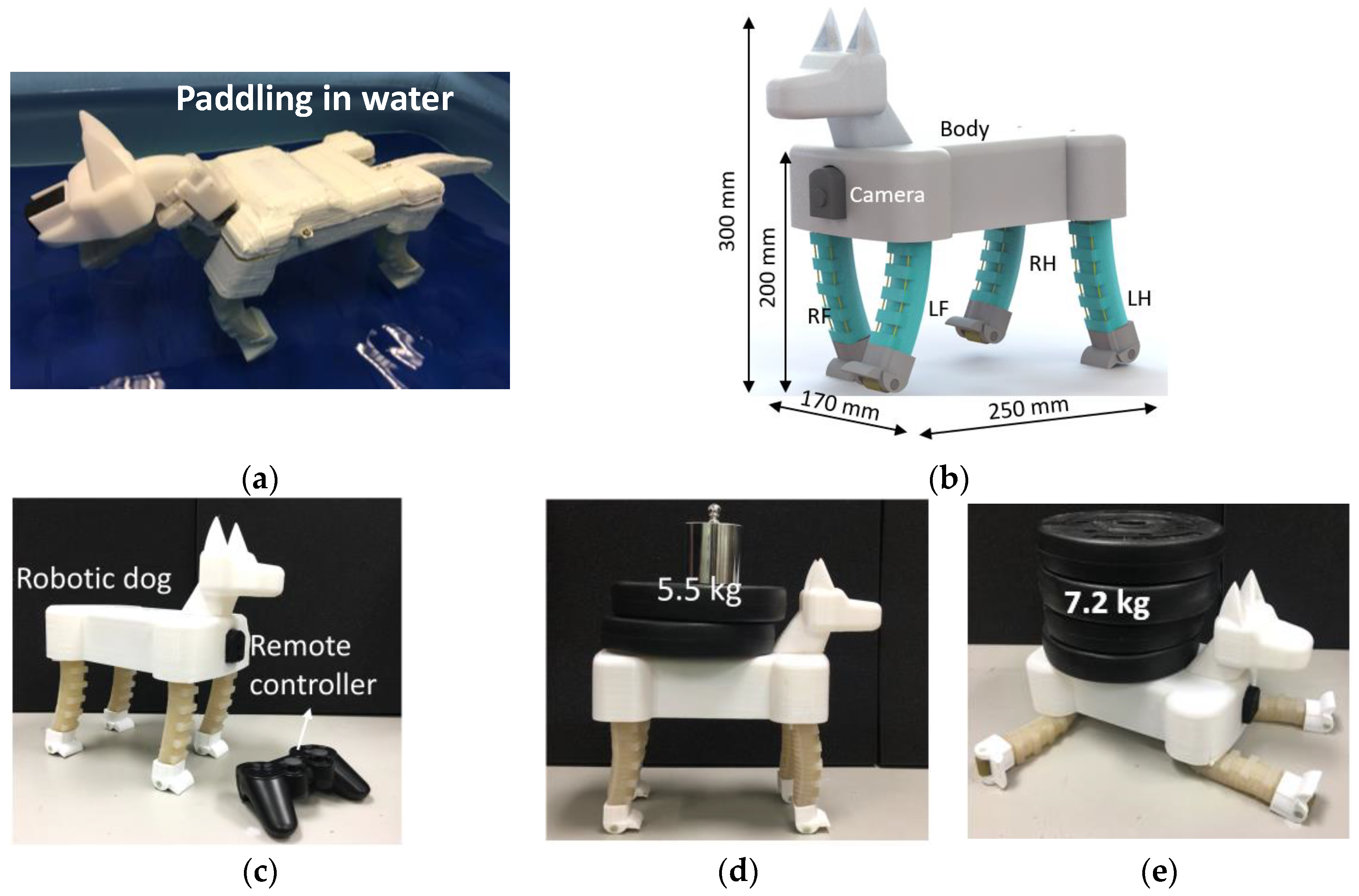
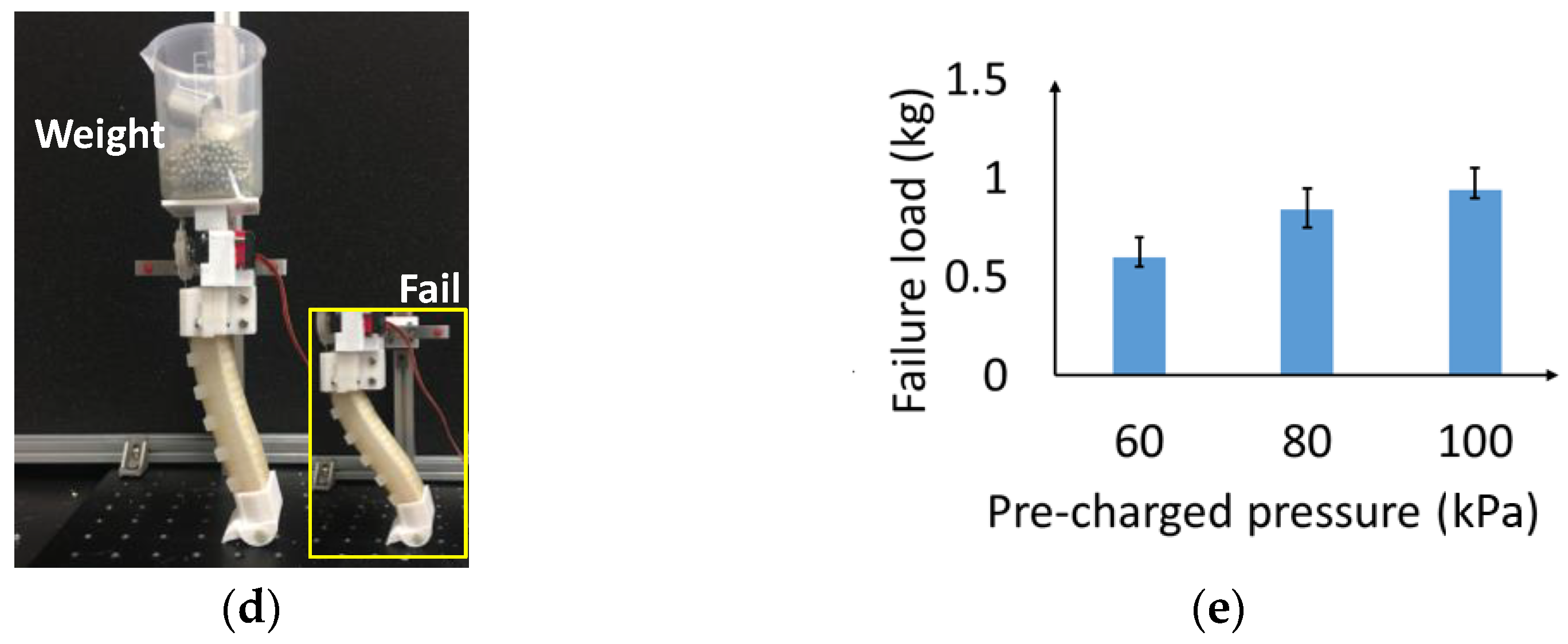
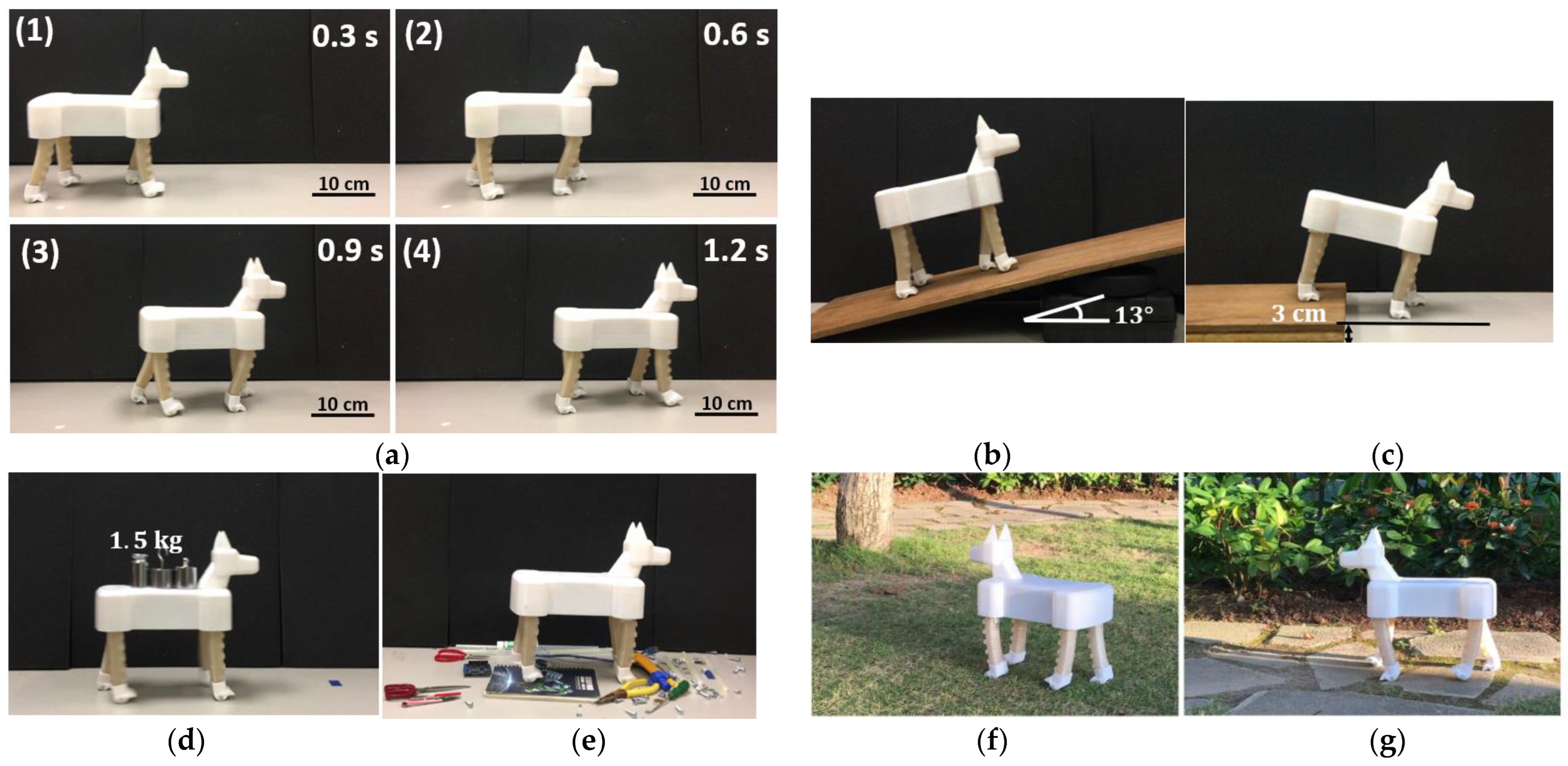
- The robotic dog has a large load-to-weight ratio, i.e., the largest static load can be up to 5.5 kg (Figure 1d), and the largest load during locomotion can be 1.5 kg (nearly the same as the body mass).
- The robotic dog’s trotting gait shows compliance and robustness. It can trot through different terrain conditions without feedback, and it can trot even when a 1.5 kg load is suddenly added to its back.
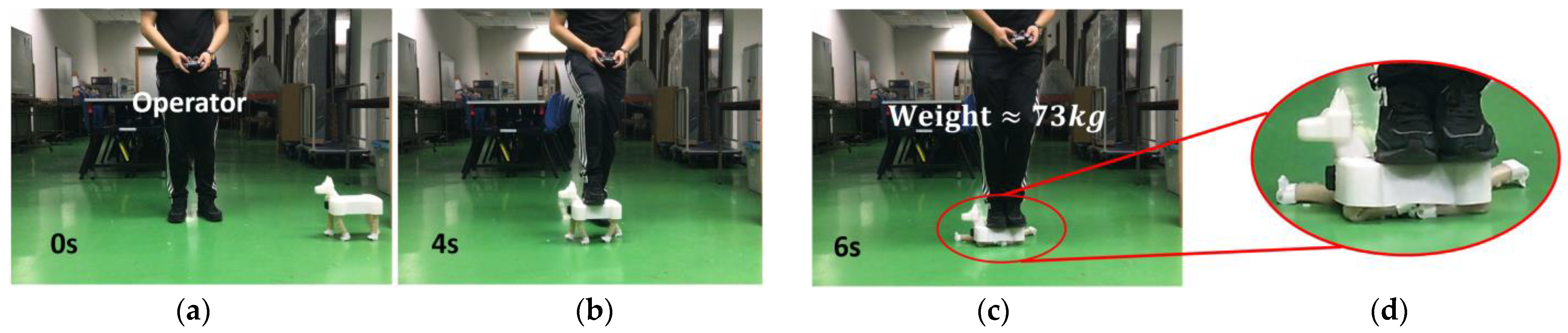
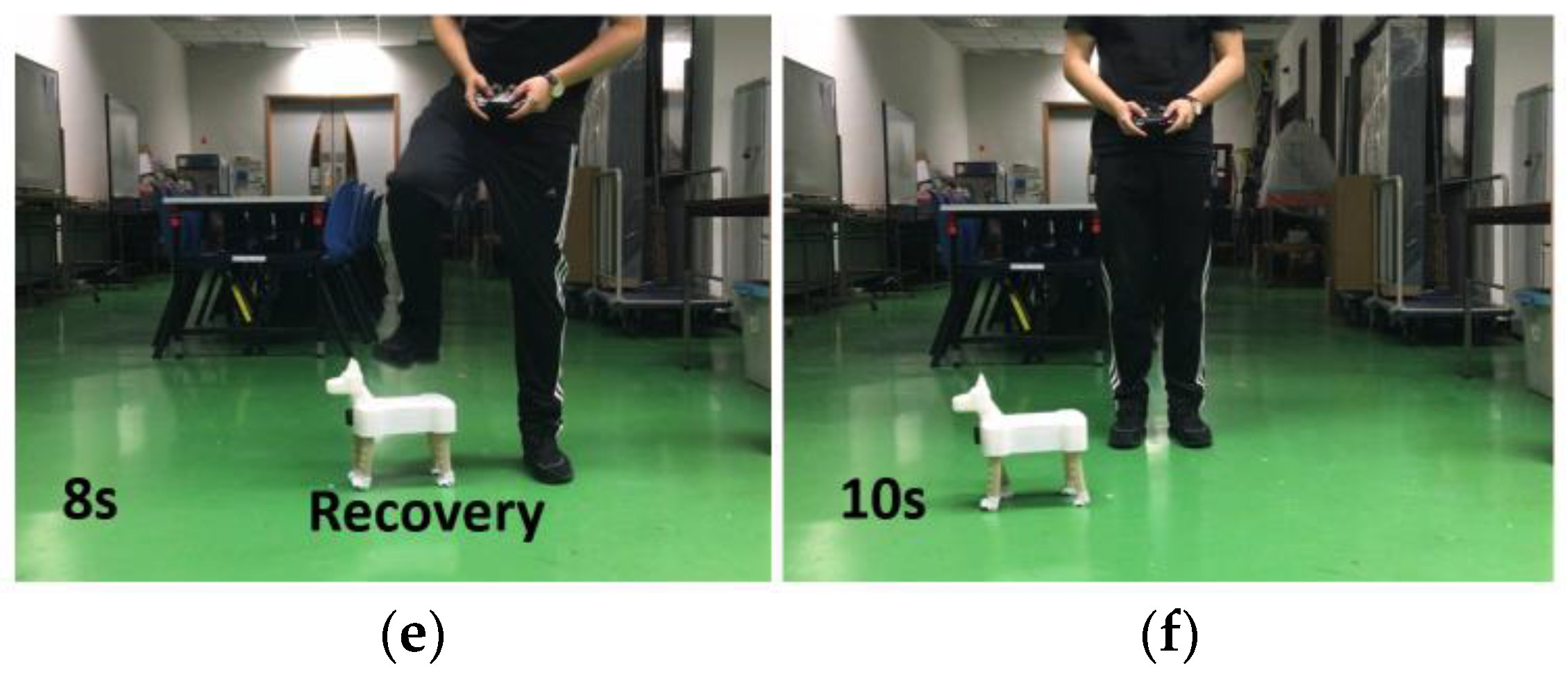
- The robotic dog shows damage resistance to large impact during trotting, as shown in Figure 1e. In the follow-up experiment, even when a person (mass is nearly 50 times that of the robot) stands on the robotic dog, the soft legs experience extreme deformation, and the mobility of the robotic dog is not damaged.
2. Mechanical Design and Modeling of the Robot
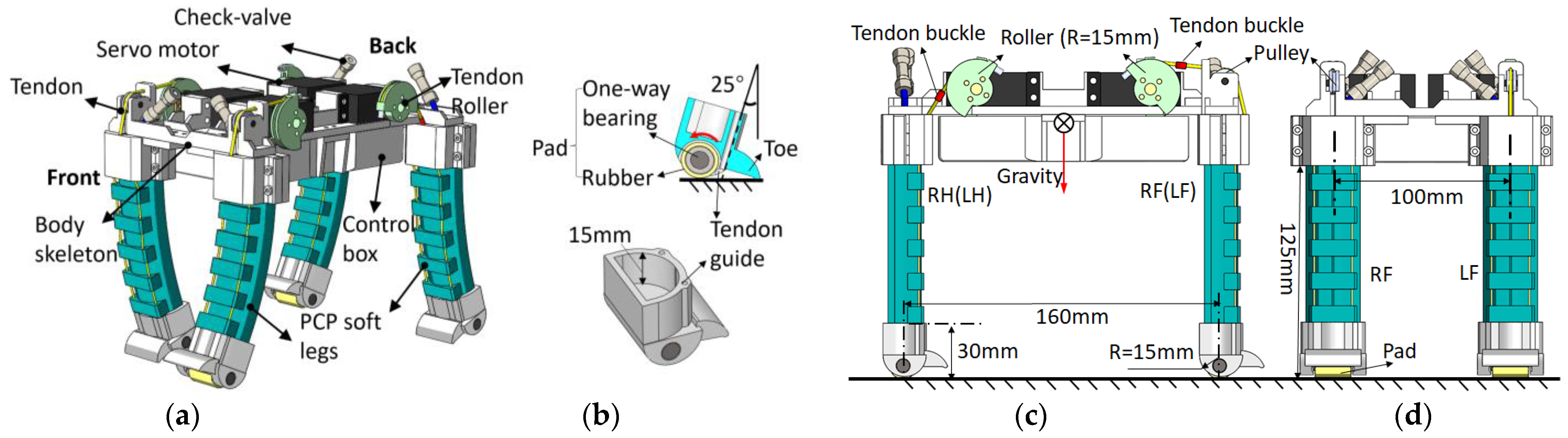
2.1. Design of the Soft Leg
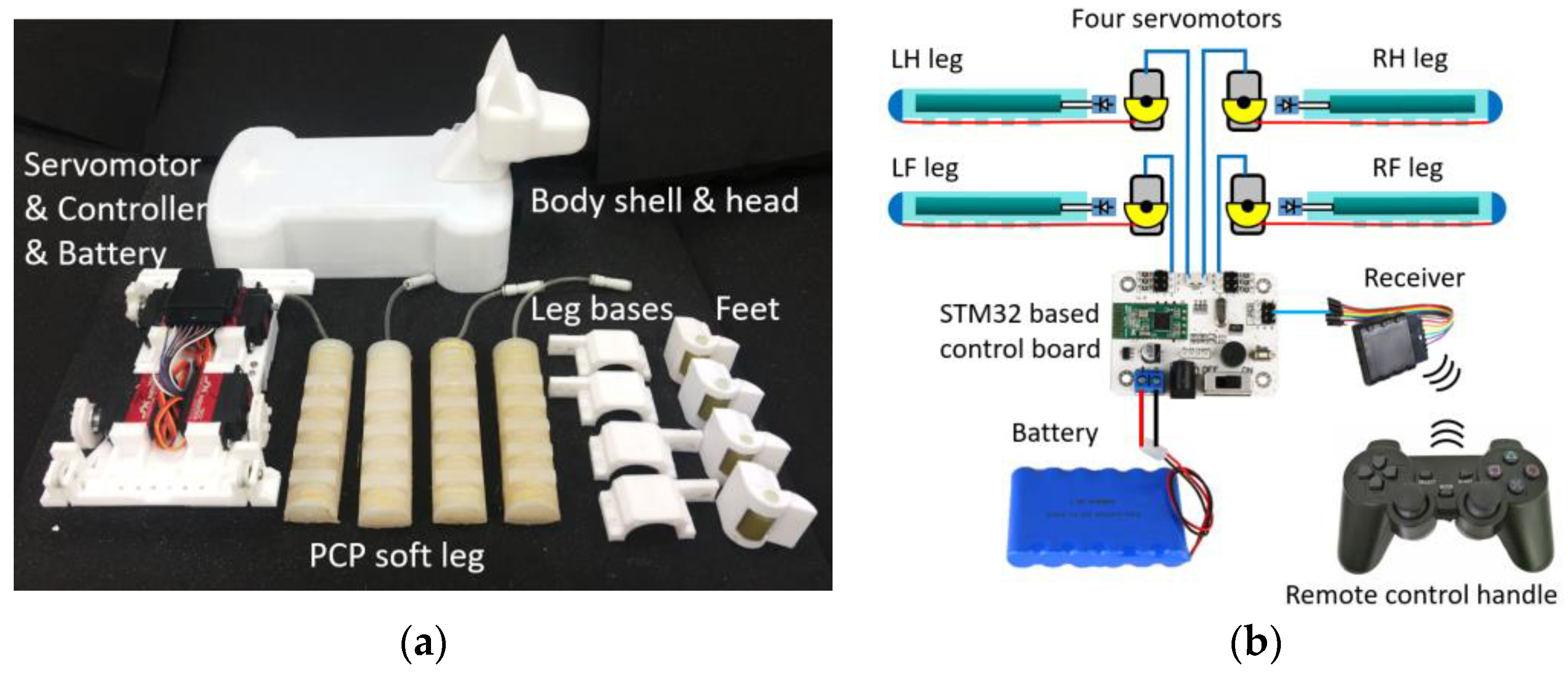
2.2. Design of the Robotic Dog
3. Trotting Gait Design and Analysis
3.1. Kinematic Analysis of a Soft Leg in One Motion Cycle
3.2. Trotting Gait Design
4. Experimental Test and Discussion of PCP Soft Legs and the Robotic Dog
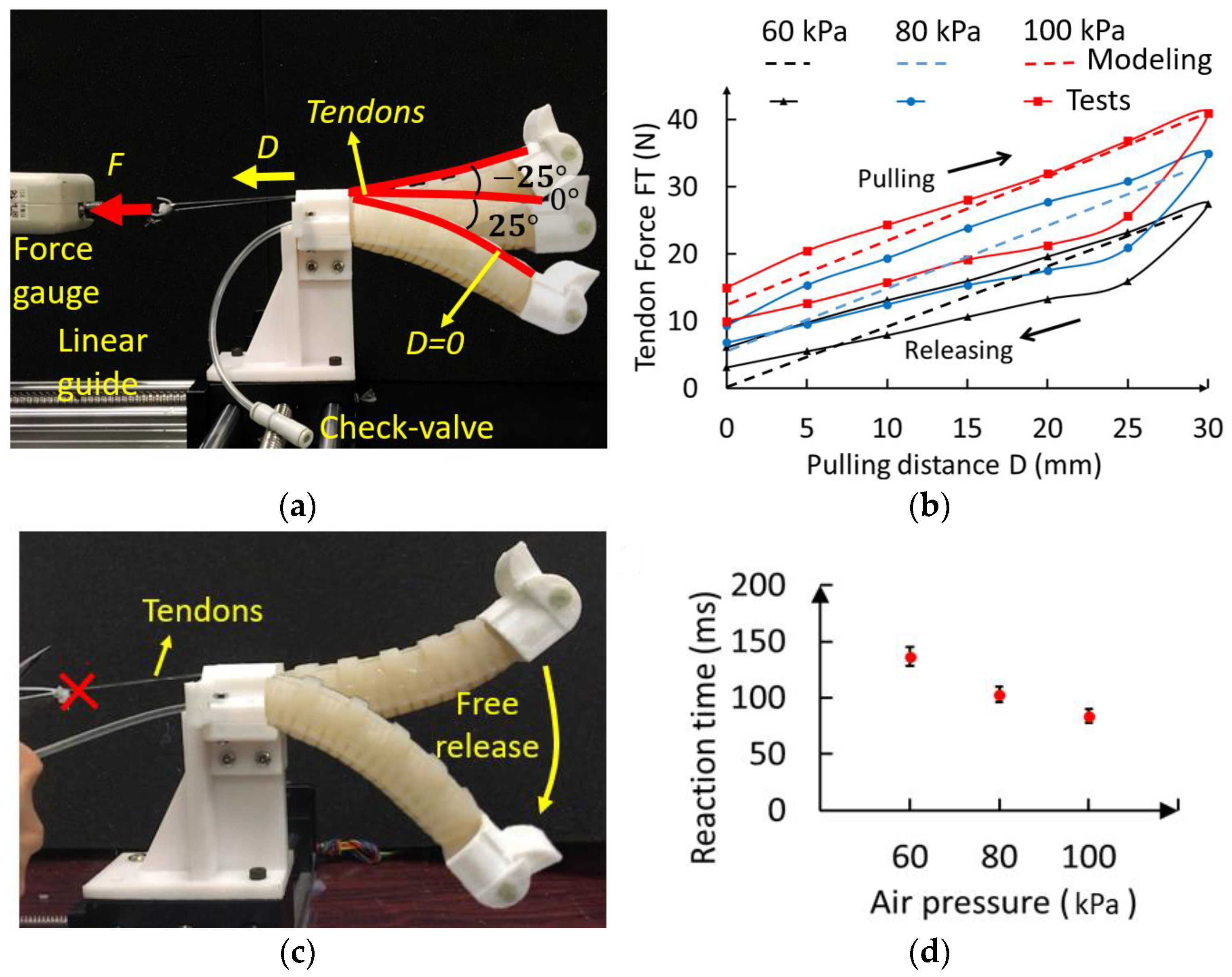
4.1. Experimental Test of the Pulling Force and Reaction Time of the PCP Soft Legs
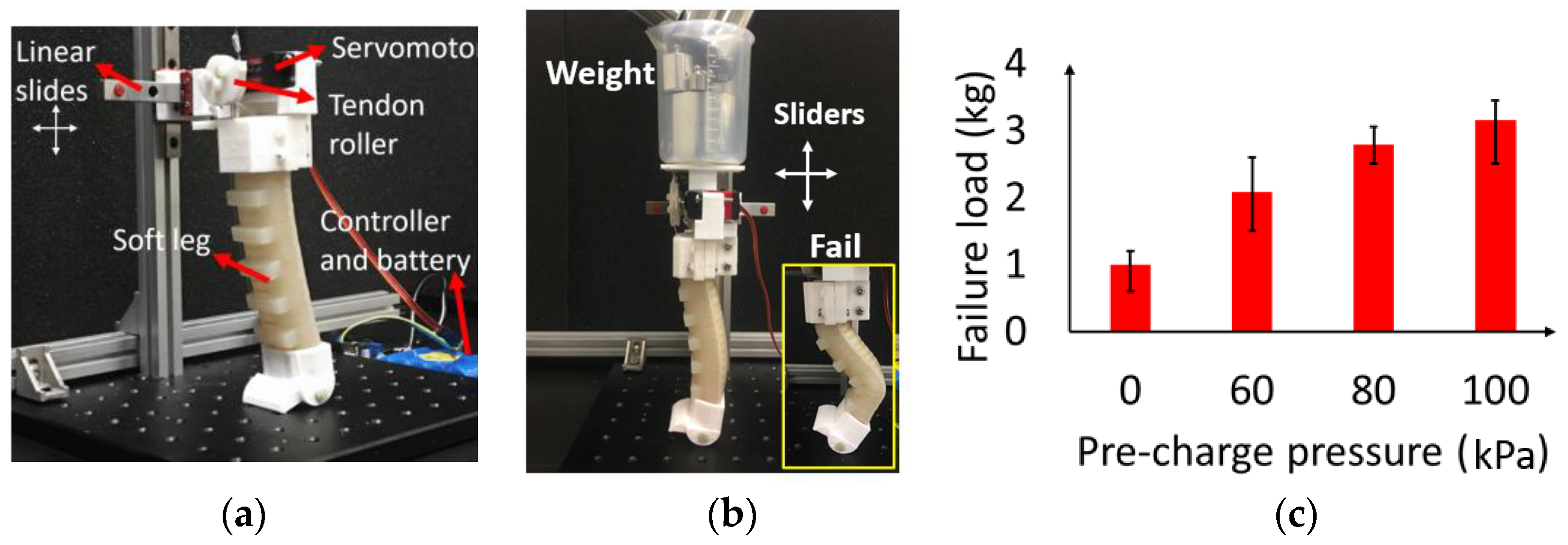
4.2. Experimental Test of the Load-Carrying Abilities of the PCP Soft Legs
4.3. Experimental Test of the Trotting Gait Controllability and Robustness of the Robotic Dog
4.4. Experimental Test of Robotic Dog Impact Resistance
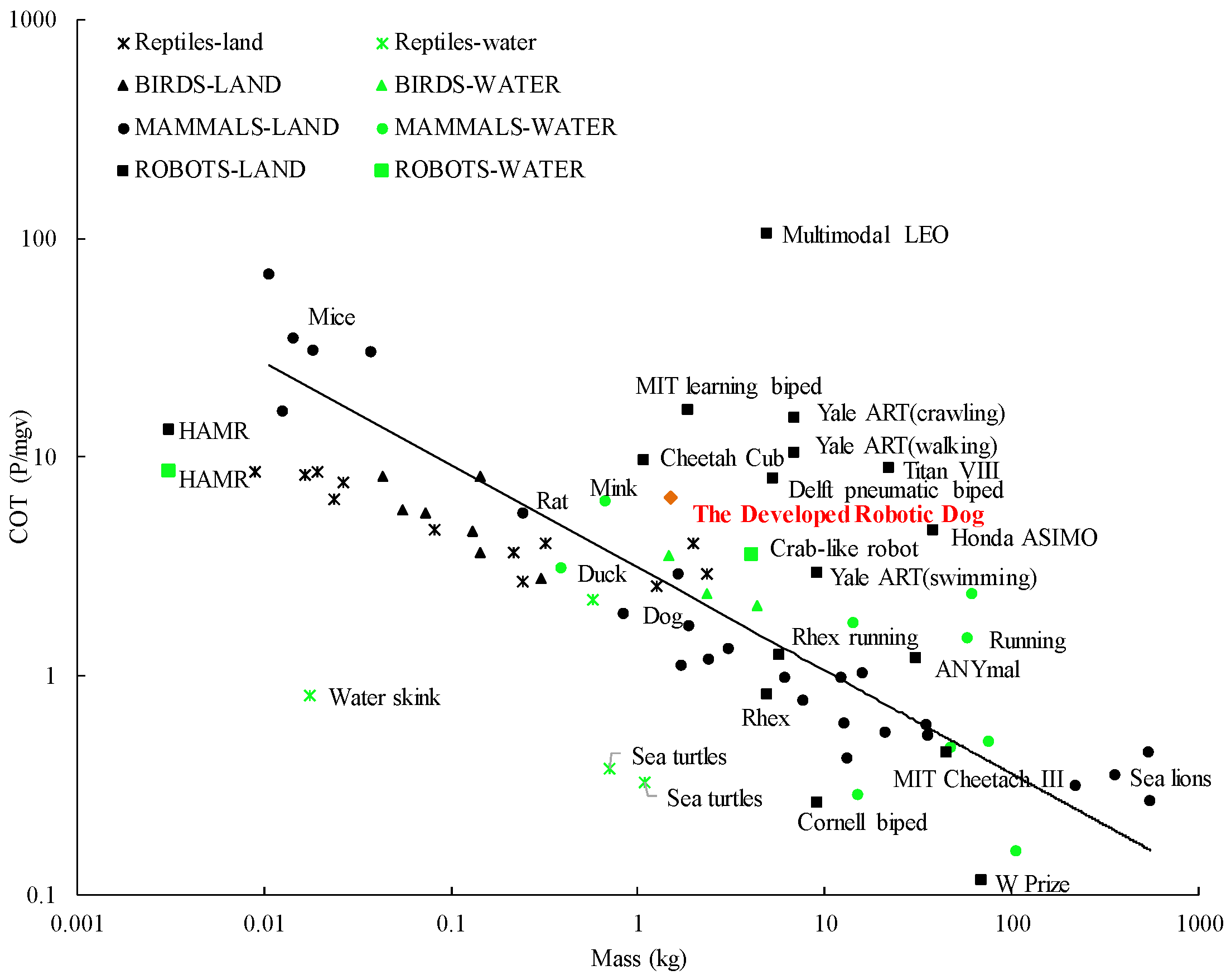
4.5. Comparison of the Robotic Dog with Related Work
5. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef]
- Armanini, C.; Boyer, F.; Mathew, A.T.; Duriez, C.; Renda, F. Soft Robots Modeling: A Structured Overview. IEEE Trans. Robot. 2021, 39, 1728–1748. [Google Scholar] [CrossRef]
- Majidi, C. Soft robotics: A perspective—Current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Alicea, R.; Georgarakis, A.M.; Haufe, F.L.; Wolf, P.; Masia, L.; Riener, R. Soft Robotic Suits: State of the Art, Core Technologies, and Open Challenges. IEEE Trans. Robot. 2022, 38, 1343–1362. [Google Scholar] [CrossRef]
- Khalil, I.S.; Klingner, A.; Hamed, Y.; Hassan, Y.S.; Misra, S. Controlled noncontact manipulation of nonmagnetic untethered microbeads orbiting two-tailed soft microrobot. IEEE Trans. Robot. 2020, 36, 1320–1332. [Google Scholar] [CrossRef]
- Jin, T.; Li, L.; Wang, G.; Cai, J.; Tian, Y.; Zhang, Q. Origami-Inspired Soft Actuators for Stimulus Perception and Crawling Robot Applications. IEEE Trans. Robot. 2022, 38, 748–764. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, D.; Yan, P.; Zhou, P.; Zou, J.; Gu, G. Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion. IEEE Trans. Robot. 2021, 38, 1806–1819. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef]
- Drotman, D.; Jadhav, S.; Karimi, M.; Dezonia, P.; Tolley, M.T. 3D printed soft actuators for a legged robot capable of navigating unstructured terrain. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5532–5538. [Google Scholar] [CrossRef]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef]
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef]
- Duggan, T.; Horowitz, L.; Ulug, A.; Baker, E.; Petersen, K. Inchworm-Inspired Locomotion in Untethered Soft Robots. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 200–205. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Karpelson, M.; Bartlett, N.W.; Galloway, K.C.; Wehner, M.; Nunes, R.; Whitesides, G.M.; Wood, R.J. An untethered jumping soft robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 561–566. [Google Scholar] [CrossRef]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161–165. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, Y.; Zhong, S.; Peng, Y.; Pu, H. A multi-modes flow control valve for simplifying the driving system of pneumatic soft robots. IEEE Trans. Ind. Electron. 2020, 68, 12472–12481. [Google Scholar] [CrossRef]
- Yang, H.; Xu, M.; Li, W.; Zhang, S. Design and implementation of a soft robotic arm driven by SMA coils. IEEE Trans. Ind. Electron. 2018, 66, 6108–6116. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Nasab, A.M.; Ye, Z.; Shan, W.; Majidi, C. Chasing biomimetic locomotion speeds: Creating untethered soft robots with shape memory alloy actuators. Sci. Robot. 2018, 3, eaau7557. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Ye, Z.; Majidi, C. Soft Electrically Actuated Quadruped (SEAQ)—Integrating a Flex Circuit Board and Elastomeric Limbs for Versatile Mobility. IEEE Robot. Autom. Lett. 2019, 4, 2415–2422. [Google Scholar] [CrossRef]
- Cao, J.; Qin, L.; Liu, J.; Ren, Q.; Foo, C.C.; Wang, H.; Lee, H.P.; Zhu, J. Untethered soft robot capable of stable locomotion using soft electrostatic actuators. Extreme Mech. Lett. 2018, 21, 9–16. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Wang, Y.; Minori, A.; Tolley, M.T.; Cai, S. Electrically controlled liquid crystal elastomer–based soft tubular actuator with multimodal actuation. Sci. Adv. 2019, 5, eaax5746. [Google Scholar] [CrossRef]
- Lee, D.V.; Bertram, J.E.; Todhunter, R.J. Acceleration and balance in trotting dogs. J. Exp. Biol. 1999, 202, 3565–3573. [Google Scholar] [CrossRef]
- Carr, B.J.; Dycus, D.L. Canine gait analysis. Recovery Rehab 2016, 6, 93–100. [Google Scholar]
- Hildebrand, M. Walking and running. In Functional Vertebrate Morphology; Hildebrand, M., Bramble, D.M., Liem, K.F., Eds.; Harvard University Press: London, UK, 1985; pp. 38–57. [Google Scholar]
- Raibert, M.; Blankespoor, K.; Nelson, G. Bigdog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Boston Dynamics’ SpotMini Is All Electric, Agile, and Has a Capable Face-Arm. Available online: https://spectrum.ieee.org/automaton/robotics/home-robots/boston-dynamics-spotmini (accessed on 30 September 2023).
- Spröwitz, A.; Tuleu, A.; Vespignani, M.; Ajallooeian, M.; Badri, E.; Ijspeert, A.J. Towards dynamic trot gait locomotion: Design, control, and experiments with Cheetah-cub, a compliant quadruped robot. Ind. Robot. 2013, 32, 932–950. [Google Scholar] [CrossRef]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ—A hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Kimura, H.; Fukuoka, Y.; Cohen, A.H. Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts. Ind. Robot. 2007, 26, 475–490. [Google Scholar] [CrossRef]
- Lucas, P.; Oota, S.; Conradt, J.; Knoll, A. Development of the neurorobotic mouse. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 299–304. [Google Scholar] [CrossRef]
- Sun, Y.; Zong, C.; Pancheri, F.; Chen, T.; Lueth, T.C. Design of topology optimized compliant legs for bio-inspired quadruped robots. Sci. Rep. 2013, 13, 4875. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, H. Precharged pneumatic soft actuators and their applications to untethered soft robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef] [PubMed]
- Ren, T.; Li, Y.; Xu, M.; Li, Y.; Chen, Y. A novel tendon-driven soft actuator with self-pumping property. Soft Robot. 2019, 7, 130–139. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Li, Y. Pre-Charged Pneumatic Soft Gripper with Closed-Loop Control. IEEE Robot. Autom. Let. 2019, 4, 1402–1408. [Google Scholar] [CrossRef]
- Li, Y.; Fish, F.; Chen, Y.; Ren, T.; Zhou, J. Bio-inspired robotic dog paddling: Kinematic and hydro-dynamic analysis. Bioinspir. Biomim. 2019, 14, 066008. [Google Scholar] [CrossRef]
- Li, Y.; Ren, T.; Li, Y.; Liu, Q.; Chen, Y. Untethered-bioinspired quadrupedal robot based on double-chamber pre-charged pneumatic soft actuators with highly flexible trunk. Soft Robot. 2020, 8, 97–108. [Google Scholar] [CrossRef]
- Jiang, M.; Zhou, Z.; Gravish, N. Flexoskeleton printing enables versatile fabrication of hybrid soft and rigid robots. Soft Robot. 2020, 7, 770–778. [Google Scholar] [CrossRef]
- Usevitch, N.S.; Hammond, Z.M.; Schwager, M.; Okamura, A.M.; Hawkes, E.W.; Follmer, S. An untethered isoperimetric soft robot. Sci. Robot. 2020, 5, eaaz0492. [Google Scholar] [CrossRef]
- Drotman, D.; Jadhav, S.; Sharp, D.; Chan, C.; Tolley, M.T. Electronics-free pneumatic circuits for controlling soft-legged robots. Sci. Robot. 2021, 6, eaay2627. [Google Scholar] [CrossRef]
- Dong, X.; Tang, C.; Jiang, S.; Shao, Q.; Zhao, H. Increasing the payload and terrain adaptivity of an untethered crawling robot via soft-rigid coupled linear actuators. IEEE Robot. Autom. Let. 2021, 6, 2405–2412. [Google Scholar] [CrossRef]
- Shao, Q.; Dong, X.; Lin, Z.; Tang, C.; Sun, H.; Liu, X.J.; Zhao, H. Untethered Robotic Millipede Driven by Low-Pressure Microfluidic Actuators for Multi-Terrain Exploration. IEEE Robot. Autom. Let. 2022, 7, 12142–12149. [Google Scholar] [CrossRef]
- Baines, R.; Patiballa, S.K.; Booth, J.; Ramirez, L.; Sipple, T.; Garcia, A.; Fish, F.; Kramer-Bottiglio, R. Multi-environment robotic transitions through adaptive morphogenesis. Nature 2022, 610, 283–289. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| States in Figure 4a | A | B | C | D | E |
|---|---|---|---|---|---|
| Bending angle | −25° | 0° | 25° | 0° | −25° |
| Servomotor angle | −30° | 0° | 30° | 0° | −30° |
| Sequence | RF | LF | RH | LH | Time Interval |
|---|---|---|---|---|---|
| 1 | −30° | 30° | 30° | −30° | 1 to 2: t1 |
| 2 | 0° | 30° | 30° | 0° | 2 to 3: t2 |
| 3 | 0° | 0° | 0° | 0° | 3 to 4: t3 (t4) |
| 4 | 30° | −30° | −30° | 30° | 4 to 5: t1 |
| 5 | 30° | 0° | 0° | 30° | 5 to 6: t2 |
| 6 | 0° | 0° | 0° | 0° | 6 to 1: t3 (t4) |
| Trotting Gait Cycle | Trotting Speed | ||||
|---|---|---|---|---|---|
| T = 2(t1 +t2 +t3) | 60 kPa | 80 kPa | 100 kPa | ||
| T1 ≈ 500 ms | 13.3 cm/s | 14.2 cm/s | 15 cm/s | ||
| t1 = 83 ms | t2 = 83 ms | t3 = t4 = 83 ms | |||
| T2 ≈ 1000 ms | 6.9 cm/s | 7.3 cm/s | 7.7 cm/s | ||
| t1 = 166 ms | t2 = 166 ms | t3 = t4 = 166 ms | |||
| Research | Actuation | Gait Type | Max Speed |
|---|---|---|---|
| [12] | Pneumatic | Crawling | 1.9 cm/s (0.07 BL/s) |
| [14] | Pneumatic | Crawling | 0.5 cm/s (0.007 BL/s) |
| [18] | SMA | Trotting | 3.2 cm/s (0.56 BL/s) |
| [20] | DEA | Crawling | 0.2 cm/s (0.02 BL/s) |
| [21] | LCE | Walking | 0.004 cm/s (0.0005 BL/s) |
| [36] | DCPCP | Walking | 10 cm/s (0.33BL/s) |
| [37] | Tendon | Trotting | 4.3 cm/s (~0.22BL/s) |
| [38] | Pneumatic | Rolling | 6 cm/s (~0.036 BL/s) |
| [39] | Pneumatic | Walking | (0.09 BL/s) |
| [40] | Pneumatic | Crawling | 1.412 cm/s (0.082BL/s). |
| [41] | Pneumatic | Crawling | 0.516 cm/s (0.0225BL/s) |
| Our robot | PCP | Trotting | 23 cm/s (~0.98 BL/s) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, Y.; Ren, T.; Xia, J.; Liu, H.; Wu, C.; Lin, S.; Chen, Y. An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs. Biomimetics 2023, 8, 596. https://doi.org/10.3390/biomimetics8080596
Li Y, Li Y, Ren T, Xia J, Liu H, Wu C, Lin S, Chen Y. An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs. Biomimetics. 2023; 8(8):596. https://doi.org/10.3390/biomimetics8080596
Chicago/Turabian StyleLi, Yunquan, Yujia Li, Tao Ren, Jiutian Xia, Hao Liu, Changchun Wu, Senyuan Lin, and Yonghua Chen. 2023. "An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs" Biomimetics 8, no. 8: 596. https://doi.org/10.3390/biomimetics8080596
APA StyleLi, Y., Li, Y., Ren, T., Xia, J., Liu, H., Wu, C., Lin, S., & Chen, Y. (2023). An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs. Biomimetics, 8(8), 596. https://doi.org/10.3390/biomimetics8080596