

Adaptive Guided Equilibrium Optimizer with Spiral Search Mechanism to Solve Global Optimization Problems

Abstract
:1. Introduction
- Utilizing the structure of EO, an enhanced variant called SSEO is proposed, which employs two simple yet effective mechanisms to improve population diversity, convergence performance, and the balance between exploration and exploitation.
- SSEO incorporates an adaptive inertia weight mechanism to enhance population diversity in EO and a swarm-inspired spiral search mechanism to expand the search space. The simultaneous operation of these two mechanisms ensures a stable balance between exploration and exploitation.
- To evaluate the effectiveness and problem-solving capability of SSEO, the CEC 2017 benchmark function set is utilized. Experimental results demonstrate that the proposed algorithm outperforms the basic EO, several recently reported EO variants, and other state-of-the-art metaheuristic algorithms.
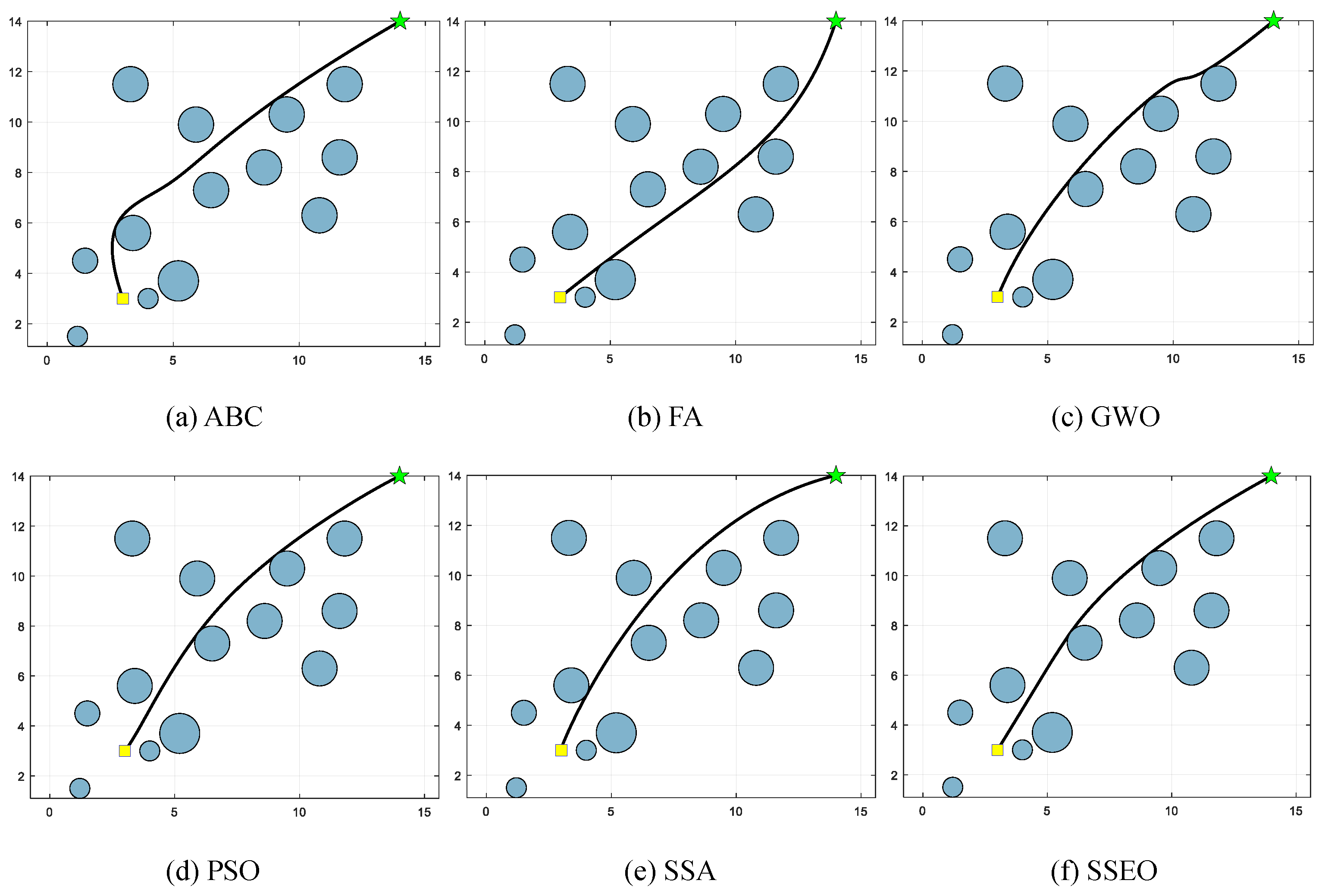
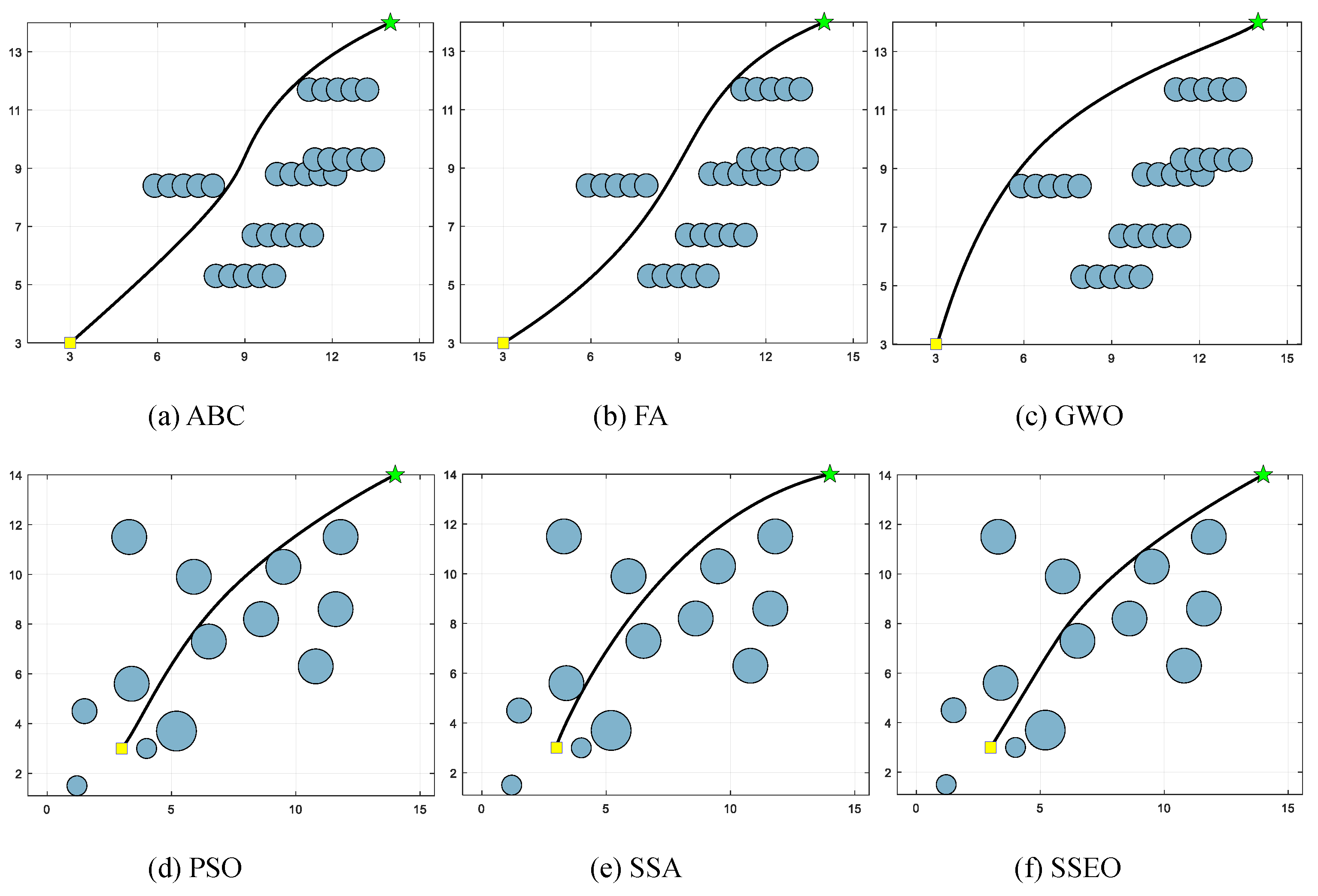
- To investigate the ability of the proposed EO variant in solving real-world problems, it is applied to address the MRPP problem. Simulation results indicate that, compared to the benchmark algorithms, SSEO can provide reasonable collision-free paths for the mobile robot in different environmental settings.
2. Related Work
3. The Original EO
4. Proposed Improved EO
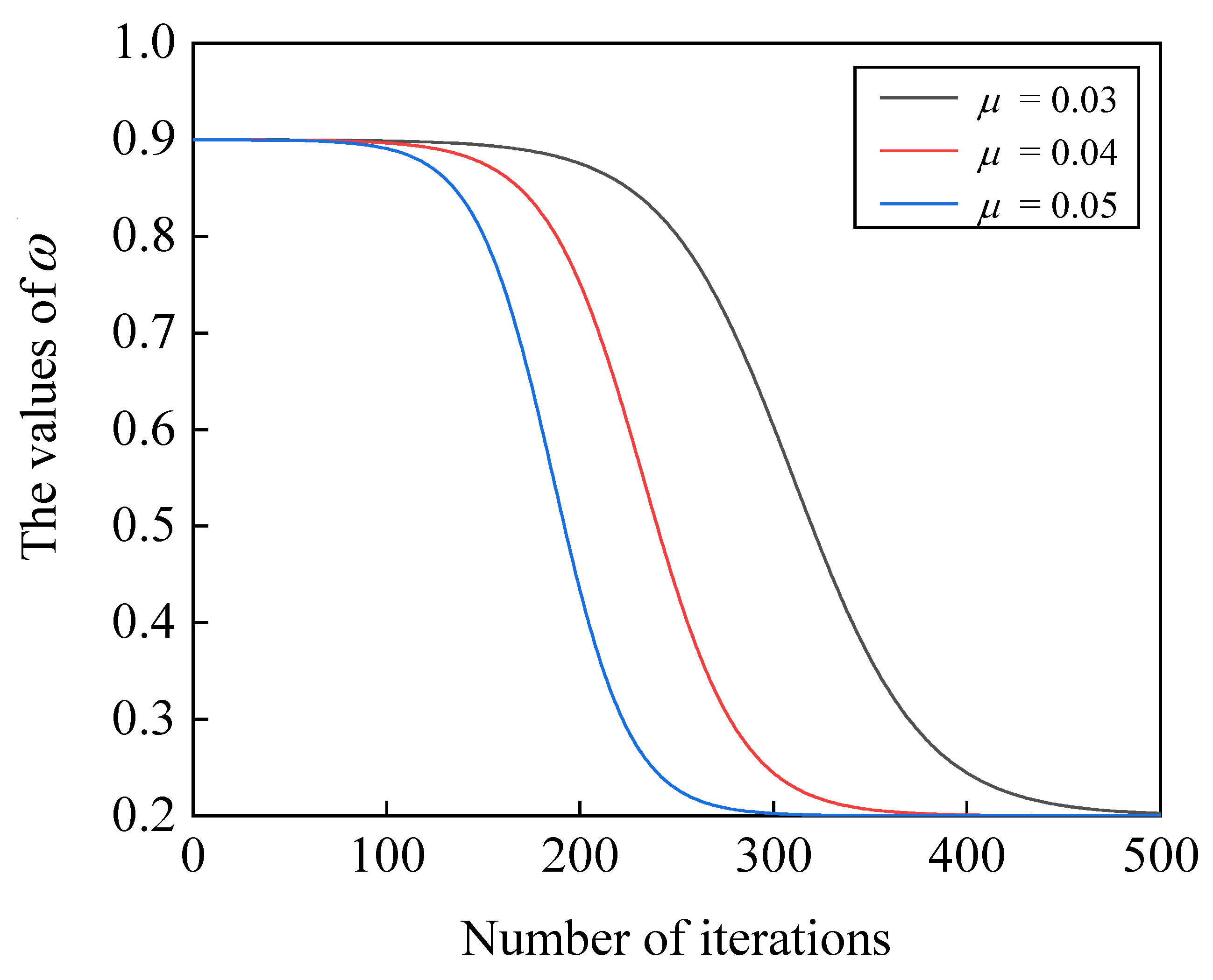
4.1. Adaptive Inertia Weight Strategy
4.2. Spiral Search Strategy
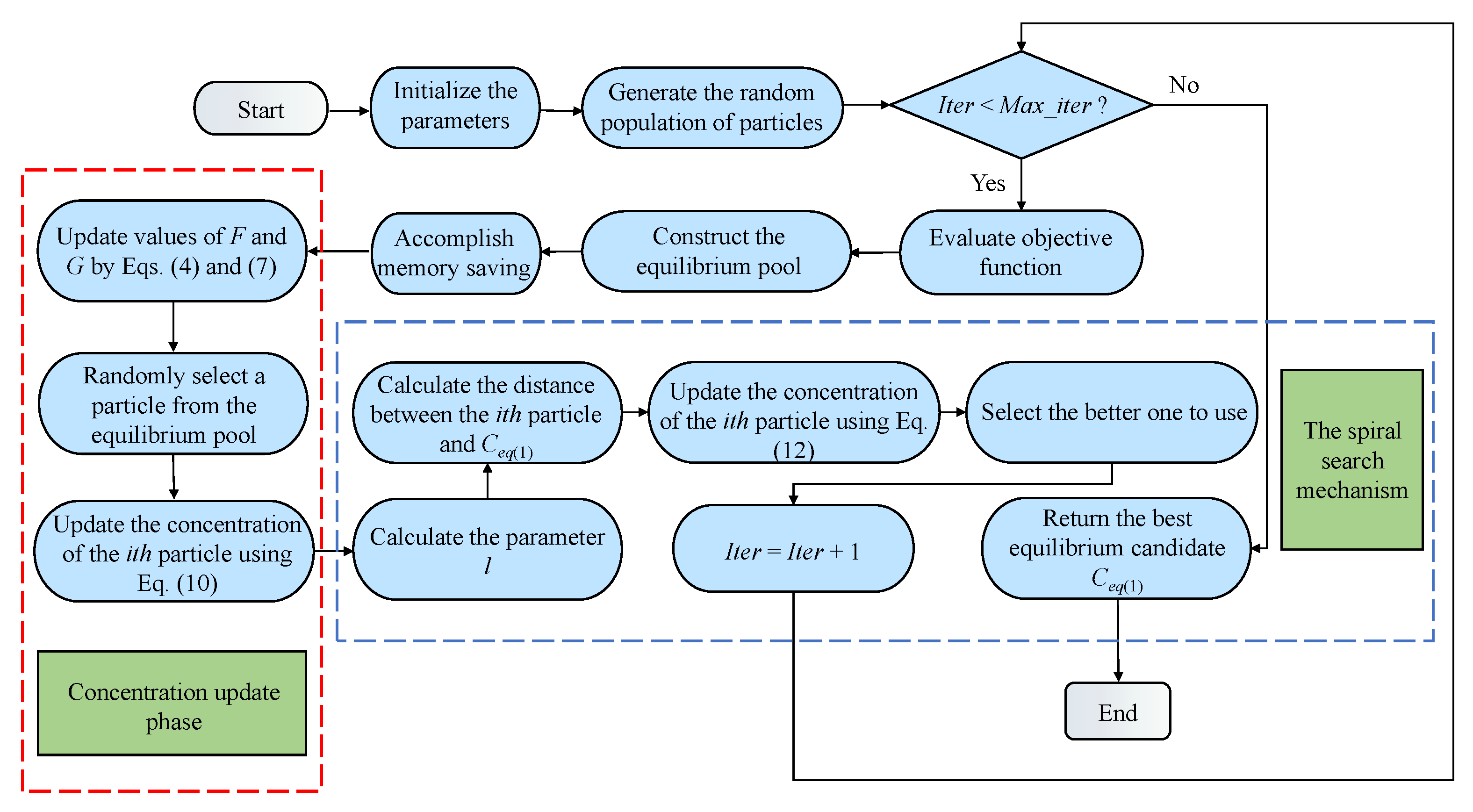
4.3. The Flowchart of SSEO
5. Simulation Results and Discussion
5.1. Benchmark Functions
5.2. Experimental Setup
5.3. Comparison of SSEO with Other Well-Performing EO-Based Methods
6. Architecture of Mobile Robot Path Planning Using SSEO
6.1. Robot Path Planning Problem Description
6.2. Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gharehchopogh, F.S. Quantum-inspired metaheuristic algorithms: Comprehensive survey and classification. Artif. Intell. Rev. 2022, 56, 5479–5543. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Yang, J.; Wang, J.; Li, B.; Yang, Z.; Hou, P. Advanced orthogonal opposition-based learning-driven dynamic salp swarm algorithm: Framework and case studies. IET Control. Theory Appl. 2022, 16, 945–971. [Google Scholar] [CrossRef]
- Kaveh, A.; Zaerreza, A. A new framework for reliability-based design optimization using metaheuristic algorithms. Structures 2022, 38, 1210–1225. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Yang, J.; Hou, P.; Dhiman, G.; Wang, J.; Yang, Z.; Li, A. Orthogonal pinhole-imaging-based learning salp swarm algorithm with self-adaptive structure for global optimization. Front. Bioeng. Biotechnol. 2022, 10, 1018895. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Azeem, S.A.A.; Jameel, M.; Abouhawwash, M. Kepler optimization algorithm: A new metaheuristic algorithm inspired by Kepler’s laws of planetary motion. Knowl.-Based Syst. 2023, 268, 110454. [Google Scholar] [CrossRef]
- Khishe, M.; Mosavi, M.R. Chimp optimization algorithm. Expert Syst. Appl. 2020, 149, 113338. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Hossein, G.A.; Yang, X.-S.; Alavi, A.H. Mixed variable structural optimization using firefly algorithm. Comput. Struct. 2011, 89, 2325–2336. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Choi, K.; Jang, D.-H.; Kang, S.-I.; Lee, J.-H.; Chung, T.-K.; Kim, H.-S. Hybrid Algorithm Combing Genetic Algorithm with Evolution Strategy for Antenna Design. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Price, K.V. Differential evolution. In Handbook of Optimization: From Classical to Modern Approach; Springer: Berlin/Heidelberg, Germany, 2013; pp. 187–214. [Google Scholar]
- Civicioglu, P. Backtracking Search Optimization Algorithm for numerical optimization problems. Appl. Math. Comput. 2013, 219, 8121–8144. [Google Scholar] [CrossRef]
- Salimi, H. Stochastic Fractal Search: A powerful metaheuristic algorithm. Knowl.-Based Syst. 2015, 75, 1–18. [Google Scholar] [CrossRef]
- Amali, D.G.B.; Dinakaran, M. Wildebeest herd optimization: A new global optimization algorithm inspired by wildebeest herding behaviour. J. Intell. Fuzzy Syst. 2019, 37, 8063–8076. [Google Scholar] [CrossRef]
- Dimitris, B.; Tsitsiklis, J. Simulated annealing. Stat. Sci. 1993, 8, 10–15. [Google Scholar]
- Osman, K.E.; Eksin, I. A new optimization method: Big bang–big crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar]
- Richard, A.F. Central force optimization. Prog. Electromagn. Res. 2007, 77, 425–491. [Google Scholar]
- Hosseini, H.S. The intelligent water drops algorithm: A nature-inspired swarm-based optimization algorithm. Int. J. Bio-Inspired Comput. 2009, 1, 71–79. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Wang, H.-J.; Dao, T.-K.; Pan, J.-S.; Liu, J.-H.; Weng, S. An Improved Slime Mold Algorithm and its Application for Optimal Operation of Cascade Hydropower Stations. IEEE Access 2020, 8, 226754–226772. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Abualigah, L.; Elaziz, M.A.; Sumari, P.; Khasawneh, A.M.; Alshinwan, M.; Mirjalili, S.; Shehab, M.; Abuaddous, H.Y.; Gandomi, A.H. Black hole algorithm: A comprehensive survey. Appl. Intell. 2022, 52, 11892–11915. [Google Scholar] [CrossRef]
- Sadollah, A.; Eskandar, H.; Lee, H.M.; Yoo, D.G.; Kim, J.H. Water cycle algorithm: A detailed standard code. SoftwareX 2016, 5, 37–43. [Google Scholar] [CrossRef]
- Shareef, H.; Ibrahim, A.A.; Mutlag, A.H. Lightning search algorithm. Appl. Soft Comput. 2015, 36, 315–333. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-Verse Optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2015, 27, 495–513. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Futur. Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Goodarzimehr, V.; Shojaee, S.; Hamzehei-Javaran, S.; Talatahari, S. Special relativity search: A novel metaheuristic method based on special relativity physics. Knowl.-Based Syst. 2022, 257, 109484. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y.; Zhang, X. Seeker optimization algorithm for optimal reactive power dispatch. IEEE Trans. Power Syst. 2009, 24, 1218–1231. [Google Scholar]
- Kaveh, A.; Talatahari, S. Optimum design of skeletal structures using imperialist competitive algorithm. Comput. Struct. 2010, 88, 1220–1229. [Google Scholar] [CrossRef]
- Cheng, S.; Qin, Q.; Chen, J.; Shi, Y. Brain storm optimization algorithm: A review. Artif. Intell. Rev. 2016, 46, 445–458. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput.-Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Mirjalili, S.; Chakrabortty, R.K.; Ryan, M.J. Solar photovoltaic parameter estimation using an improved equilibrium optimizer. Sol. Energy 2020, 209, 694–708. [Google Scholar] [CrossRef]
- Ahmed, S.; Ghosh, K.K.; Mirjalili, S.; Sarkar, R. AIEOU: Automata-based improved equilibrium optimizer with U-shaped transfer function for feature selection. Knowl.-Based Syst. 2021, 228, 107283. [Google Scholar] [CrossRef]
- Wunnava, A.; Naik, M.K.; Panda, R.; Jena, B.; Abraham, A. A novel interdependence based multilevel thresholding technique using adaptive equilibrium optimizer. Eng. Appl. Artif. Intell. 2020, 94, 103836. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K.; Mirjalili, S. An efficient equilibrium optimizer with mutation strategy for numerical optimization. Appl. Soft Comput. 2020, 96, 106542. [Google Scholar] [CrossRef]
- Houssein, E.H.; Helmy, B.E.-D.; Oliva, D.; Jangir, P.; Premkumar, M.; Elngar, A.A.; Shaban, H. An efficient multi-thresholding based COVID-19 CT images segmentation approach using an improved equilibrium optimizer. Biomed. Signal Process. Control 2022, 73, 103401. [Google Scholar] [CrossRef]
- Liu, J.; Li, W.; Li, Y. LWMEO: An efficient equilibrium optimizer for complex functions and engineering design problems. Expert Syst. Appl. 2022, 198, 116828. [Google Scholar] [CrossRef]
- Tan, W.-H.; Mohamad-Saleh, J. A hybrid whale optimization algorithm based on equilibrium concept. Alex. Eng. J. 2023, 68, 763–786. [Google Scholar] [CrossRef]
- Zhang, X.; Lin, Q. Information-utilization strengthened equilibrium optimizer. Artif. Intell. Rev. 2022, 55, 4241–4274. [Google Scholar] [CrossRef]
- Minocha, S.; Singh, B. A novel equilibrium optimizer based on levy flight and iterative cosine operator for engineering optimization problems. Expert Syst. 2022, 39, e12843. [Google Scholar] [CrossRef]
- Balakrishnan, K.; Dhanalakshmi, R.; Akila, M.; Sinha, B.B. Improved equilibrium optimization based on Levy flight approach for feature selection. Evol. Syst. 2023, 14, 735–746. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Ma, L.; Wang, C.; Xie, N.-G.; Shi, M.; Ye, Y.; Wang, L. Moth-flame optimization algorithm based on diversity and mutation strategy. Appl. Intell. 2021, 51, 5836–5872. [Google Scholar] [CrossRef]
- Shan, W.; Qiao, Z.; Heidari, A.A.; Chen, H.; Turabieh, H.; Teng, Y. Double adaptive weights for stabilization of moth flame optimizer: Balance analysis, engineering cases, and medical diagnosis. Knowl.-Based Syst. 2021, 214, 106728. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Yang, Z.; Li, B.; Guan, Z.; Bao, L. Rank-driven salp swarm algorithm with orthogonal opposition-based learning for global optimization. Appl. Intell. 2022, 52, 7922–7964. [Google Scholar] [CrossRef]
- Ding, H.; Cao, X.; Wang, Z.; Dhiman, G.; Hou, P.; Wang, J.; Li, A.; Hu, X. Velocity clamping-assisted adaptive salp swarm algorithm: Balance analysis and case studies. Math. Biosci. Eng. 2022, 19, 7756–7804. [Google Scholar] [CrossRef] [PubMed]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Hidalgo-Paniagua, A.; Vega-Rodríguez, M.A.; Ferruz, J.; Pavón, N. Solving the multi-objective path planning problem in mobile robotics with a firefly-based approach. Soft Comput. 2017, 21, 949–964. [Google Scholar] [CrossRef]
- Xu, F.; Li, H.; Pun, C.-M.; Hu, H.; Li, Y.; Song, Y.; Gao, H. A new global best guided artificial bee colony algorithm with application in robot path planning. Appl. Soft Comput. 2020, 88, 106037. [Google Scholar] [CrossRef]
- Ou, Y.; Yin, P.; Mo, L. An Improved Grey Wolf Optimizer and Its Application in Robot Path Planning. Biomimetics 2023, 8, 84. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | No. | Description | Search Range | Optimal |
|---|---|---|---|---|
| Unimodal | 1 | Shifted and Rotated Bent Cigar Function | [−100, 100] | 100 |
| 2 | Shifted and Rotated Sum of Different Power Function | [−100, 100] | 200 | |
| 3 | Shifted and Rotated Zakharov Function | [−100, 100] | 300 | |
| Multimodal | 4 | Shifted and Rotated Rosenbrock’s Function | [−100, 100] | 400 |
| 5 | Shifted and Rotated Rastrigin’s Function | [−100, 100] | 500 | |
| 6 | Shifted and Rotated Expanded Scaffer’s Function | [−100, 100] | 600 | |
| 7 | Shifted and Rotated Lunacek Bi-Rastrigin Function | [−100, 100] | 700 | |
| 8 | Shifted and Rotated Non-Continuous Rastrigin’s Function | [−100, 100] | 800 | |
| 9 | Shifted and Rotated Levy Function | [−100, 100] | 900 | |
| 10 | Shifted and Rotated Schwefel’s Function | [−100, 100] | 1000 | |
| Hybrid | 11 | Hybrid Function 1 (N = 3) | [−100, 100] | 1100 |
| 12 | Hybrid Function 2 (N = 3) | [−100, 100] | 1200 | |
| 13 | Hybrid Function 3 (N = 3) | [−100, 100] | 1300 | |
| 14 | Hybrid Function 4 (N = 4) | [−100, 100] | 1400 | |
| 15 | Hybrid Function 5 (N = 4) | [−100, 100] | 1500 | |
| 16 | Hybrid Function 6 (N = 4) | [−100, 100] | 1600 | |
| 17 | Hybrid Function 6 (N = 5) | [−100, 100] | 1700 | |
| 18 | Hybrid Function 6 (N = 5) | [−100, 100] | 1800 | |
| 19 | Hybrid Function 6 (N = 5) | [−100, 100] | 1900 | |
| 20 | Hybrid Function 6 (N = 6) | [−100, 100] | 2000 | |
| Composition | 21 | Composition Function 1 (N = 3) | [−100, 100] | 2100 |
| 22 | Composition Function 2 (N = 3) | [−100, 100] | 2200 | |
| 23 | Composition Function 3 (N = 4) | [−100, 100] | 2300 | |
| 24 | Composition Function 4 (N = 4) | [−100, 100] | 2400 | |
| 25 | Composition Function 5 (N = 5) | [−100, 100] | 2500 | |
| 26 | Composition Function 6 (N = 5) | [−100, 100] | 2600 | |
| 27 | Composition Function 7 (N = 6) | [−100, 100] | 2700 | |
| 28 | Composition Function 8 (N = 6) | [−100, 100] | 2800 | |
| 29 | Composition Function 9 (N = 3) | [−100, 100] | 2900 | |
| 30 | Composition Function 10 (N = 3) | [−100, 100] | 3000 |
| Algorithms | Parameters Setting |
|---|---|
| EO [31] | = 2, = 1, GP = 0.5 (Default) |
| mEO [39] | = 2, = 1, GP = 0.5 (Default) |
| LWMEO [41] | = 2, = 1, GP = 0.5, c = 1 (Default) |
| ISEO [43] | = 2, = 1, GP = 0.5 (Default) |
| IEO [40] | = 2, = 1 (Default) |
| MFO [46] | b = 1 and a decreases linearly from −1 to −2 (Default) |
| DMMFO [47] | b = 1 and a decreases linearly from −1 to −2 (Default) |
| WEMFO [48] | b = 1, s = 0, and a decreases linearly from −1 to −2 (Default) |
| PSO [8] | = 2, = 2, and linear reduction from 0.9 to 0.1 (Default) |
| OOSSA [51] | b = 0.55, k = 10,000, decreases nonlinearly from 2 to 0 (Default) |
| Function | Results | EO | mEO | LWMEO | ISEO | IEO | MFO | WEMFO | DMMFO | OOSSA | PSO | SSEO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | Mean | 9.85E+04 | 6.73E+06 | 9.14E+03 | 9.62E+09 | 4.91E+03 | 1.21E+10 | 1.95E+08 | 2.03E+08 | 5.81E+03 | 9.22E+07 | 4.19E+03 |
| Std | 1.04E+05 | 8.77E+06 | 8.49E+03 | 2.08E+09 | 4.84E+03 | 7.54E+09 | 1.62E+08 | 2.66E+08 | 4.58E+03 | 3.55E+08 | 5.47E+03 | |
| f-rank | 5 | 6 | 4 | 10 | 2 | 11 | 8 | 9 | 3 | 7 | 1 | |
| F3 | Mean | 5.21E+04 | 1.28E+04 | 5.17E+04 | 1.34E+05 | 3.67E+04 | 1.83E+05 | 7.23E+04 | 1.77E+05 | 3.32E+04 | 4.29E+04 | 4.11E+03 |
| Std | 1.33E+04 | 3.43E+03 | 3.46E+04 | 3.02E+04 | 1.01E+04 | 5.35E+04 | 7.48E+03 | 4.09E+04 | 9.01E+03 | 1.21E+04 | 4.96E+03 | |
| f-rank | 7 | 2 | 6 | 9 | 4 | 11 | 8 | 10 | 3 | 5 | 1 | |
| F4 | Mean | 5.12E+02 | 5.09E+02 | 4.85E+02 | 1.33E+03 | 5.04E+02 | 1.05E+03 | 5.75E+02 | 5.68E+02 | 5.10E+02 | 5.02E+02 | 5.02E+02 |
| Std | 1.81E+01 | 2.06E+01 | 2.93E+01 | 3.18E+02 | 1.87E+01 | 6.30E+02 | 4.88E+01 | 5.91E+01 | 1.64E+01 | 2.36E+01 | 1.92E+02 | |
| f-rank | 7 | 5 | 1 | 11 | 4 | 10 | 9 | 8 | 6 | 2 | 3 | |
| F5 | Mean | 5.94E+02 | 5.88E+02 | 7.35E+02 | 7.36E+02 | 5.63E+02 | 7.15E+02 | 6.75E+02 | 6.59E+02 | 6.09E+02 | 6.91E+02 | 5.79E+02 |
| Std | 2.28E+01 | 2.24E+01 | 5.16E+01 | 1.98E+01 | 2.03E+01 | 5.26E+01 | 5.15E+01 | 2.62E+01 | 2.76E+01 | 2.75E+01 | 2.56E+01 | |
| f-rank | 4 | 3 | 10 | 11 | 1 | 9 | 7 | 6 | 5 | 8 | 2 | |
| F6 | Mean | 6.02E+02 | 6.03E+02 | 6.57E+03 | 6.18E+02 | 6.01E+02 | 6.42E+02 | 6.32E+02 | 6.30E+02 | 6.27E+02 | 6.46E+02 | 6.01E+02 |
| Std | 1.94E+00 | 1.73E+00 | 7.49E+00 | 4.66E+00 | 1.28E−01 | 1.19E+01 | 1.78E+01 | 1.23E+01 | 1.17E+01 | 7.39E+01 | 9.08E−01 | |
| f-rank | 3 | 4 | 11 | 5 | 1 | 9 | 8 | 7 | 6 | 10 | 2 | |
| F7 | Mean | 8.41E+02 | 8.24E+02 | 1.17E+03 | 1.17E+03 | 7.99E+02 | 1.21E+03 | 9.46E+02 | 9.50E+02 | 8.66E+02 | 9.01E+02 | 8.09E+02 |
| Std | 2.76E+01 | 2.54E+01 | 1.19E+02 | 9.14E+01 | 1.89E+01 | 1.58E+02 | 3.79E+01 | 7.42E+01 | 2.89E+01 | 4.17E+01 | 2.61E+01 | |
| f-rank | 4 | 3 | 10 | 9 | 1 | 11 | 7 | 8 | 5 | 6 | 2 | |
| F8 | Mean | 8.94E+02 | 8.79E+02 | 9.80E+02 | 1.04E+03 | 8.98E+02 | 9.99E+02 | 9.99E+02 | 9.58E+02 | 9.11E+02 | 9.41E+02 | 8.77E+02 |
| Std | 2.79E+01 | 1.65E+01 | 5.27E+01 | 2.33E+01 | 1.56E+01 | 3.68E+01 | 5.16E+01 | 3.36E+01 | 2.71E+01 | 2.36E+01 | 1.71E+01 | |
| f-rank | 3 | 2 | 8 | 11 | 4 | 9 | 10 | 7 | 5 | 6 | 1 | |
| F9 | Mean | 1.35E+03 | 1.13E+03 | 6.67E+03 | 2.09E+03 | 9.14E+02 | 7.91E+03 | 5.78E+03 | 5.11E+03 | 3.53E+03 | 4.13E+03 | 1.02E+03 |
| Std | 4.98E+02 | 2.95E+02 | 2.41E+03 | 3.44E+02 | 4.23E+01 | 2.21E+03 | 3.09E+03 | 1.63E+03 | 1.42E+03 | 7.28E+02 | 1.48E+02 | |
| f-rank | 4 | 3 | 10 | 5 | 1 | 11 | 9 | 8 | 6 | 7 | 2 | |
| F10 | Mean | 5.72E+03 | 5.02E+03 | 5.43E+03 | 8.66E+03 | 5.21E+03 | 5.42E+03 | 5.31E+03 | 5.25E+03 | 5.02E+03 | 4.71E+03 | 4.58E+03 |
| Std | 8.37E+02 | 5.78E+02 | 7.62E+02 | 2.98E+02 | 7.59E+02 | 7.29E+02 | 7.40E+02 | 6.76E+02 | 6.03E+02 | 5.23E+02 | 7.05E+02 | |
| f-rank | 10 | 3 | 9 | 11 | 5 | 8 | 7 | 6 | 4 | 2 | 1 | |
| F11 | Mean | 1.25E+03 | 1.26E+03 | 1.29E+03 | 2.20E+03 | 1.20E+03 | 4.87E+03 | 1.81E+03 | 4.41E+03 | 1.34E+03 | 1.23E+03 | 1.16E+03 |
| Std | 4.76E+01 | 4.28E+01 | 7.13E+01 | 3.61E+02 | 4.17E+01 | 4.51E+03 | 5.47E+02 | 3.64E+03 | 7.54E+01 | 3.72E+01 | 3.42E+01 | |
| f-rank | 4 | 5 | 6 | 9 | 2 | 11 | 8 | 10 | 7 | 3 | 1 | |
| F12 | Mean | 1.60E+06 | 3.21E+06 | 1.05E+06 | 2.24E+08 | 4.83E+05 | 3.11E+08 | 2.33E+07 | 8.94E+06 | 1.61E+07 | 1.04E+06 | 7.84E+05 |
| Std | 1.27E+06 | 1.86E+06 | 9.06E+05 | 9.39E+07 | 5.12E+05 | 5.62E+08 | 4.34E+07 | 8.53E+06 | 1.99E+07 | 5.55E+05 | 6.07E+05 | |
| f-rank | 5 | 6 | 4 | 10 | 1 | 11 | 9 | 7 | 8 | 3 | 2 | |
| F13 | Mean | 2.48E+04 | 9.74E+04 | 2.08E+04 | 1.94E+07 | 2.44E+04 | 1.29E+08 | 2.66E+06 | 4.89E+05 | 9.21E+04 | 1.63E+05 | 2.37E+04 |
| Std | 2.67E+04 | 5.52E+04 | 1.86E+04 | 1.55E+07 | 2.30E+04 | 4.44E+08 | 7.59E+06 | 2.41E+06 | 6.92E+04 | 8.09E+05 | 2.03E+04 | |
| f-rank | 4 | 6 | 1 | 10 | 3 | 11 | 9 | 8 | 5 | 7 | 2 | |
| F14 | Mean | 8.36E+04 | 6.55E+04 | 8.06E+04 | 2.33E+05 | 5.04E+04 | 3.97E+05 | 7.67E+05 | 1.21E+06 | 5.07E+04 | 5.47E+04 | 2.78E+04 |
| Std | 5.95E+04 | 6.29E+04 | 7.08E+04 | 1.97E+05 | 3.71E+04 | 4.75E+05 | 8.51E+05 | 1.63E+06 | 4.24E+04 | 2.55E+04 | 2.68E+04 | |
| f-rank | 7 | 5 | 6 | 8 | 2 | 9 | 10 | 11 | 3 | 4 | 1 | |
| F15 | Mean | 5.68E+03 | 9.74E+03 | 1.06E+04 | 3.47E+06 | 8.39E+03 | 6.86E+04 | 4.42E+04 | 1.49E+04 | 2.62E+04 | 5.62E+03 | 4.89E+03 |
| Std | 4.70E+03 | 6.67E+03 | 9.37E+03 | 7.62E+06 | 8.14E+03 | 7.24E+04 | 4.65E+04 | 1.13E+04 | 1.45E+04 | 1.33E+04 | 4.00E+03 | |
| f-rank | 3 | 5 | 6 | 11 | 4 | 10 | 9 | 7 | 8 | 2 | 1 | |
| F16 | Mean | 2.54E+03 | 2.46E+03 | 2.97E+03 | 3.38E+03 | 2.36E+03 | 3.18E+03 | 2.99E+03 | 2.95E+03 | 2.74E+03 | 2.72E+03 | 2.35E+03 |
| Std | 3.13E+02 | 2.89E+02 | 4.19E+02 | 2.52E+02 | 3.39E+02 | 4.50E+02 | 3.45E+02 | 3.06E+02 | 4.02E+02 | 2.61E+02 | 3.15E+02 | |
| f-rank | 4 | 3 | 8 | 11 | 2 | 10 | 9 | 7 | 6 | 5 | 1 | |
| F17 | Mean | 2.04E+03 | 1.94E+03 | 2.55E+03 | 2.44E+03 | 1.97E+03 | 2.62E+03 | 2.43E+03 | 2.30E+03 | 2.13E+03 | 2.44E+03 | 2.03E+03 |
| Std | 1.71E+02 | 1.43E+02 | 2.84E+02 | 2.16E+02 | 1.62E+02 | 2.69E+02 | 2.24E+02 | 2.62E+02 | 1.71E+02 | 2.57E+02 | 1.88E+02 | |
| f-rank | 4 | 1 | 10 | 8 | 2 | 11 | 7 | 6 | 5 | 9 | 3 | |
| F18 | Mean | 1.39E+06 | 4.84E+05 | 3.88E+05 | 8.69E+06 | 5.96E+05 | 8.96E+06 | 3.99E+06 | 3.20E+06 | 7.80E+05 | 8.14E+05 | 3.26E+05 |
| Std | 1.62E+06 | 3.94E+05 | 3.02E+05 | 5.34E+06 | 4.77E+05 | 1.09E+07 | 3.24E+06 | 5.04E+06 | 6.95E+05 | 3.44E+05 | 3.09E+05 | |
| f-rank | 7 | 3 | 2 | 10 | 4 | 11 | 9 | 8 | 5 | 6 | 1 | |
| F19 | Mean | 1.30E+04 | 8.25E+03 | 1.16E+04 | 7.97E+05 | 1.09E+04 | 6.85E+06 | 2.32E+05 | 3.37E+04 | 1.93E+06 | 7.73E+03 | 6.50E+03 |
| Std | 1.61E+04 | 7.86E+03 | 1.10E+04 | 9.25E+05 | 1.32E+04 | 1.94E+07 | 4.72E+05 | 5.33E+04 | 1.65E+06 | 1.12E+04 | 4.45E+03 | |
| f-rank | 6 | 3 | 5 | 9 | 4 | 11 | 8 | 7 | 10 | 2 | 1 | |
| F20 | Mean | 2.35E+03 | 2.25E+03 | 2.79E+03 | 2.74E+03 | 2.33E+03 | 2.74E+03 | 2.64E+03 | 2.52E+03 | 2.48E+03 | 2.67E+03 | 2.31E+03 |
| Std | 1.41E+02 | 1.12E+02 | 2.81E+02 | 1.73E+02 | 1.41E+02 | 2.39E+02 | 1.96E+02 | 2.22E+02 | 1.82E+02 | 1.83E+02 | 1.43E+02 | |
| f-rank | 4 | 1 | 11 | 9 | 3 | 10 | 7 | 6 | 5 | 8 | 2 | |
| F21 | Mean | 2.39E+03 | 2.38E+03 | 2.52E+03 | 2.52E+03 | 2.36E+03 | 2.49E+03 | 2.46E+03 | 2.45E+03 | 2.41E+03 | 2.50E+03 | 2.35E+03 |
| Std | 3.19E+01 | 2.68E+01 | 6.87E+01 | 1.38E+01 | 1.88E+01 | 4.56E+01 | 5.82E+1 | 4.94E+01 | 2.83E+01 | 3.51E+01 | 1.82E+01 | |
| f-rank | 4 | 3 | 11 | 10 | 2 | 8 | 7 | 6 | 5 | 9 | 1 | |
| F22 | Mean | 4.33E+03 | 2.32E+03 | 6.14E+03 | 6.35E+03 | 3.44E+03 | 6.83E+03 | 5.95E+03 | 5.05E+03 | 2.31E+03 | 4.83E+03 | 2.30E+03 |
| Std | 2.24E+03 | 6.81E+00 | 2.11E+03 | 3.33E+03 | 1.98E+03 | 1.35E+03 | 2.12E+03 | 2.23E+03 | 1.17E+00 | 1.97E+03 | 1.52E+00 | |
| f-rank | 5 | 3 | 9 | 10 | 4 | 11 | 8 | 7 | 2 | 6 | 1 | |
| F23 | Mean | 2.73E+03 | 2.74E+03 | 2.98E+03 | 2.86E+03 | 2.71E+03 | 2.85E+03 | 2.81E+03 | 2.78E+03 | 2.78E+03 | 3.23E+03 | 2.73E+03 |
| Std | 2.24E+01 | 3.17E+01 | 9.47E+01 | 1.45E+01 | 2.03E+01 | 4.64E+01 | 4.57E+01 | 3.47E+01 | 4.08E+01 | 1.17E+02 | 2.56E+01 | |
| f-rank | 2 | 4 | 10 | 9 | 1 | 8 | 7 | 5 | 6 | 11 | 3 | |
| F24 | Mean | 2.90E+03 | 2.90E+03 | 3.15E+03 | 3.03E+03 | 2.88E+03 | 2.98E+03 | 2.97E+03 | 2.96E+03 | 2.92E+03 | 3.25E+03 | 2.88E+03 |
| Std | 2.61E+01 | 3.22E+01 | 8.49E+01 | 1.51E+01 | 2.72E+01 | 3.31E+01 | 3.19E+01 | 4.39E+01 | 3.19E+01 | 8.19E+01 | 2.08E+01 | |
| f-rank | 3 | 4 | 10 | 9 | 2 | 8 | 7 | 6 | 5 | 11 | 1 | |
| F25 | Mean | 2.91E+03 | 2.91E+03 | 2.92E+03 | 3.29E+03 | 2.90E+03 | 3.51E+03 | 2.96E+03 | 2.97E+03 | 2.92E+03 | 2.90E+03 | 2.89E+03 |
| Std | 1.99E+01 | 1.91E+01 | 2.52E+01 | 1.39E+02 | 6.12E+00 | 7.33E+02 | 2.70E+01 | 7.55E+01 | 2.01E+01 | 1.05E+01 | 1.08E+01 | |
| f-rank | 5 | 4 | 7 | 10 | 2 | 11 | 8 | 9 | 6 | 3 | 1 | |
| F26 | Mean | 4.29E+03 | 4.30E+03 | 7.25E+03 | 5.92E+03 | 4.04E+03 | 5.82E+03 | 5.51E+03 | 5.45E+03 | 4.58E+03 | 5.03E+03 | 3.88E+03 |
| Std | 5.61E+02 | 3.56E+02 | 1.35E+03 | 1.95E+02 | 3.71E+02 | 5.03E+02 | 4.84E+02 | 5.26E+02 | 7.29E+02 | 1.75E+03 | 6.59E+02 | |
| f-rank | 3 | 4 | 11 | 10 | 2 | 9 | 8 | 7 | 5 | 6 | 1 | |
| F27 | Mean | 3.23E+03 | 3.22E+03 | 3.28E+03 | 3.22E+03 | 3.22E+03 | 3.25E+03 | 3.26E+03 | 3.24E+03 | 3.24E+03 | 3.57E+03 | 3.22E+03 |
| Std | 9.55E+01 | 1.01E+01 | 3.17E+01 | 6.93E+00 | 7.97E+02 | 2.62E+01 | 5.25E+01 | 1.53E+01 | 2.51E+01 | 1.40E+02 | 1.19E+01 | |
| f-rank | 5 | 2 | 10 | 1 | 4 | 8 | 9 | 6 | 7 | 11 | 3 | |
| F28 | Mean | 3.25E+03 | 3.26E+03 | 3.28E+03 | 3.54E+03 | 3.23E+03 | 4.20E+03 | 3.41E+03 | 3.43E+03 | 3.28E+03 | 3.24E+03 | 3.21E+03 |
| Std | 2.33E+01 | 2.71E+01 | 1.24E+02 | 1.04E+02 | 2.11E+01 | 8.34E+02 | 8.01E+01 | 1.43E+02 | 3.87E+01 | 1.84E+01 | 1.88E+01 | |
| f-rank | 4 | 5 | 7 | 10 | 2 | 11 | 8 | 9 | 6 | 3 | 1 | |
| F29 | Mean | 3.78E+03 | 3.69E+03 | 4.24E+03 | 4.39E+03 | 3.66E+03 | 4.20E+03 | 4.23E+03 | 4.05E+03 | 4.06E+03 | 4.24E+03 | 3.65E+03 |
| Std | 2.09E+02 | 1.91E+02 | 2.98E+02 | 2.43E+02 | 1.53E+02 | 3.18E+02 | 3.01E+02 | 2.48E+02 | 2.63E+02 | 2.31E+02 | 1.88E+02 | |
| f-rank | 4 | 3 | 10 | 11 | 2 | 7 | 8 | 5 | 6 | 9 | 1 | |
| F30 | Mean | 1.89E+04 | 8.42E+04 | 1.94E+04 | 3.60E+06 | 1.37E+04 | 1.09E+06 | 1.15E+06 | 1.38E+05 | 7.54E+06 | 1.98E+04 | 1.09E+04 |
| Std | 1.76E+04 | 7.87E+04 | 1.06E+04 | 3.67E+06 | 9.90E+03 | 1.91E+06 | 2.86E+06 | 3.69E+05 | 6.31E+06 | 6.08E+03 | 3.91E+03 | |
| f-rank | 3 | 6 | 4 | 10 | 2 | 8 | 9 | 7 | 11 | 5 | 1 | |
| Average f-rank | 4.5862 | 3.6897 | 7.4828 | 9.2069 | 2.5172 | 9.7586 | 8.1724 | 7.3448 | 5.6552 | 6.0690 | 1.5172 | |
| Overall f-rank | 4 | 3 | 8 | 10 | 2 | 11 | 9 | 7 | 5 | 6 | 1 |
| Function | EO p-Value | mEO p-Value | LWMEO p-Value | ISEO p-Value | IEO p-Value | MFO p-Value | WEMFO p-Value | DMMFO p-Value | OOSSA p-Value | PSO p-Value |
|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 9.92E−11 | 3.02E−11 | 4.51E−02 | 3.02E−11 | 2.84E−01 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 6.07E−11 | 2.59E−01 |
| F3 | 3.69E−11 | 1.33E−10 | 1.11E−06 | 3.02E−11 | 3.26E−07 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.07E−09 |
| F4 | 5.55E−02 | 1.58E−01 | 2.07E−02 | 3.02E−11 | 5.69E−01 | 2.15E−10 | 8.99E−11 | 6.01E−08 | 2.53E−04 | 9.94E−01 |
| F5 | 4.86E−03 | 7.01E−02 | 3.69E−11 | 3.02E−11 | 6.67E−03 | 1.09E−10 | 3.47E−10 | 1.78E−10 | 6.28E−06 | 4.50E−11 |
| F6 | 2.60E−05 | 3.50E−09 | 3.02E−11 | 3.02E−11 | 2.32E−06 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 |
| F7 | 1.41E−04 | 5.19E−02 | 3.02E−11 | 3.02E−11 | 9.63E−02 | 3.02E−11 | 3.02E−11 | 4.97E−11 | 3.82E−09 | 5.00E−09 |
| F8 | 1.63E−02 | 7.39E−01 | 4.98E−11 | 3.02E−11 | 3.37E−05 | 3.02E−11 | 1.33E−10 | 7.39E−11 | 7.60E−07 | 1.09E−10 |
| F9 | 3.56E−04 | 7.29E−03 | 3.02E−1 | 3.69E−11 | 1.41E−09 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.69E−11 | 3.02E−11 |
| F10 | 3.32E−06 | 1.03E−02 | 1.11E−04 | 3.02E−11 | 1.86E−03 | 6.77E−05 | 2.84E−04 | 1.06E−03 | 5.57E−03 | 5.49E−01 |
| F11 | 7.12E−09 | 8.89E−10 | 1.78E−10 | 3.02E−11 | 4.46E−04 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.60E−07 |
| F12 | 6.10E−03 | 9.83E−08 | 3.48E−01 | 3.02E−11 | 1.27E−02 | 3.02E−11 | 3.02E−11 | 5.09E−08 | 3.02E−11 | 5.40E−01 |
| F13 | 7.28E−01 | 2.67E−09 | 4.55E−01 | 3.02E−11 | 1.37E−01 | 4.18E−09 | 2.78E−07 | 5.75E−02 | 1.86E−06 | 1.54E−01 |
| F14 | 4.35E−05 | 3.85E−03 | 9.79E−05 | 1.69E−09 | 4.43E−03 | 3.92E−09 | 1.09E−10 | 1.01E−08 | 1.39E−06 | 1.58E−01 |
| F15 | 3.71E−01 | 2.25E−04 | 2.62E−03 | 3.02E−11 | 1.15E−01 | 2.87E−10 | 3.65E−08 | 1.49E−04 | 3.50E−09 | 4.20E−01 |
| F16 | 3.27E−02 | 2.12E−01 | 2.57E−07 | 5.49E−11 | 7.85E−01 | 3.82E−09 | 6.53E−08 | 6.01E−08 | 7.38E−10 | 1.64E−05 |
| F17 | 9.23E−01 | 3.39E−02 | 1.56E−08 | 4.31E−08 | 2.32E−02 | 1.17E−09 | 6.53E−08 | 1.68E−04 | 9.51E−06 | 2.57E−07 |
| F18 | 5.09E−06 | 3.27E−02 | 1.02E−01 | 3.02E−11 | 5.57E−03 | 1.17E−09 | 3.20E−09 | 1.55E−09 | 4.11E−07 | 1.17E−03 |
| F19 | 7.62E−01 | 8.07E−01 | 6.57E−02 | 3.02E−11 | 7.51E−01 | 6.01E−08 | 9.83E−08 | 4.86E−03 | 3.69E−11 | 3.11E−01 |
| F20 | 1.62E−01 | 1.30E−01 | 4.57E−09 | 8.89E−10 | 5.59E−01 | 9.26E−09 | 3.08E−08 | 1.89E−04 | 7.09E−08 | 5.46E−09 |
| F21 | 8.15E−05 | 8.56E−04 | 3.02E−11 | 3.02E−11 | 8.77E−01 | 3.02E−11 | 6.70E−11 | 6.70E−11 | 1.43E−08 | 3.02E−11 |
| F22 | 4.18E−09 | 3.34E−11 | 3.50E−09 | 3.02E−11 | 1.58E−04 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 8.89E−10 | 3.08E−08 |
| F23 | 8.65E−01 | 6.41E−01 | 3.02E−11 | 3.02E−11 | 2.50E−03 | 5.49E−11 | 8.89E−10 | 3.96E−08 | 1.07E−07 | 3.02E−11 |
| F24 | 1.54E−01 | 5.90E−01 | 3.02E−11 | 3.02E−11 | 8.12E−04 | 1.09E−10 | 4.20E−10 | 1.41E−09 | 4.12E−06 | 3.02E−11 |
| F25 | 7.74E−06 | 2.68E−06 | 1.29E−06 | 3.02E−11 | 3.40E−01 | 8.15E−11 | 4.98E−11 | 5.07E−10 | 5.49E−11 | 5.08E−03 |
| F26 | 4.43E−03 | 6.67E−03 | 2.92E−09 | 3.02E−11 | 7.39E−01 | 3.02E−11 | 3.02E−11 | 4.50E−11 | 2.38E−07 | 1.26E−01 |
| F27 | 2.71E−01 | 8.30E−01 | 1.61E−10 | 4.73E−01 | 1.99E−02 | 4.44E−07 | 1.56E−08 | 4.64E−05 | 1.55E−09 | 3.02E−11 |
| F28 | 2.88E−06 | 8.35E−08 | 3.32E−06 | 3.02E−11 | 3.67E−03 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.33E−10 | 6.55E−04 |
| F29 | 2.61E−02 | 4.64E−01 | 2.03E−09 | 4.98E−11 | 9.35E−01 | 8.48E−09 | 2.92E−09 | 8.35E−08 | 2.87E−10 | 1.55E−09 |
| F30 | 1.27E−02 | 6.70E−11 | 2.39E−04 | 3.02E−11 | 3.79E−01 | 3.02E−11 | 9.92E−11 | 6.70E−11 | 3.02E−11 | 1.34E−05 |
| +/=/− | 24/4/1 | 24/4/1 | 29/0/0 | 29/0/0 | 23/6/0 | 29/0/0 | 29/0/0 | 29/0/0 | 29/0/0 | 25/3/1 |
| Function | Results | EO | mEO | LWMEO | ISEO | IEO | MFO | WEMFO | DMMFO | OOSSA | PSO | SSEO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.49E+10 | 9.12E+09 | 7.13E+09 | 1.89E+11 | 2.41E+09 | 1.57E+11 | 5.47E+10 | 5.08E+10 | 2.67E+09 | 2.81E+09 | 1.86E+05 |
| Std | 5.52E+09 | 2.89E+09 | 5.39E+09 | 2.53E+10 | 2.46E+09 | 5.37E+10 | 1.00E+10 | 1.05E+10 | 7.71E+08 | 2.37E+09 | 1.29E+07 | |
| f-rank | 7 | 6 | 5 | 11 | 2 | 10 | 9 | 8 | 3 | 4 | 1 | |
| F3 | Mean | 5.80E+05 | 3.22E+05 | 6.83E+05 | 1.10E+06 | 5.23E+05 | 1.02E+06 | 4.11E+05 | 9.27E+05 | 2.99E+05 | 4.79E+05 | 2.86E+05 |
| Std | 1.26E+05 | 3.02E+04 | 1.45E+05 | 2.93E+05 | 7.07E+04 | 1.53E+09 | 9.33E+04 | 1.40E+05 | 1.25E+04 | 9.35E+04 | 1.85E+04 | |
| f-rank | 7 | 3 | 8 | 11 | 6 | 10 | 4 | 9 | 2 | 5 | 1 | |
| F4 | Mean | 1.84E+03 | 1.82E+03 | 2.08E+03 | 3.83E+04 | 1.14E+03 | 2.84E+04 | 6.21E+03 | 6.50E+03 | 1.31E+03 | 1.01E+03 | 9.01E+02 |
| Std | 4.12E+02 | 2.78E+02 | 5.81E+02 | 8.17E+03 | 1.31E+02 | 1.25E+04 | 1.53E+03 | 1.95E+03 | 1.14E+02 | 2.79E+02 | 6.41E+01 | |
| f-rank | 6 | 5 | 7 | 11 | 3 | 10 | 8 | 9 | 4 | 2 | 1 | |
| F5 | Mean | 1.32E+03 | 1.25E+03 | 1.49E+03 | 1.71E+03 | 1.10E+03 | 1.94E+03 | 1.50E+03 | 1.72E+03 | 1.14E+03 | 1.28E+03 | 1.08E+03 |
| Std | 9.93E+01 | 7.06E+01 | 1.54E+02 | 7.26E+01 | 8.52E+01 | 1.96E+02 | 1.08E+02 | 1.29E+02 | 1.12E+02 | 6.47E+01 | 7.43E+01 | |
| f-rank | 6 | 4 | 7 | 9 | 2 | 11 | 8 | 10 | 3 | 5 | 1 | |
| F6 | Mean | 6.36E+02 | 6.36E+02 | 6.67E+02 | 6.61E+02 | 6.18E+02 | 6.84E+02 | 6.85E+02 | 6.79E+02 | 6.48E+02 | 6.63E+02 | 6.15E+02 |
| Std | 6.75E+00 | 6.94E+00 | 6.51E+00 | 5.77E+00 | 3.32E+00 | 7.96E+00 | 1.37E+01 | 9.20E+00 | 2.98E+00 | 4.09E+00 | 5.60E+00 | |
| f-rank | 3 | 4 | 8 | 6 | 2 | 10 | 11 | 9 | 5 | 7 | 1 | |
| F7 | Mean | 2.11E+03 | 2.06E+03 | 3.58E+03 | 3.25E+03 | 1.72E+03 | 5.78E+03 | 2.86E+03 | 4.33E+03 | 1.69E+03 | 2.05E+03 | 1.71E+03 |
| Std | 2.09E+02 | 1.58E+02 | 4.59E+02 | 8.75E+02 | 1.38E+02 | 6.91E+02 | 1.54E+02 | 5.24E+02 | 1.28E+02 | 2.74E+02 | 1.93E+02 | |
| f-rank | 6 | 5 | 9 | 8 | 3 | 11 | 7 | 10 | 1 | 4 | 2 | |
| F8 | Mean | 1.59E+03 | 1.51E+03 | 1.90E+03 | 2.00E+03 | 1.41E+03 | 2.31E+03 | 1.81E+03 | 2.04E+03 | 1.41E+03 | 1.68E+03 | 1.33E+03 |
| Std | 8.92E+01 | 8.48E+01 | 2.62E+02 | 5.07E+01 | 8.38E+01 | 1.95E+02 | 1.41E+02 | 1.42E+02 | 1.12E+02 | 7.82E+01 | 1.02E+02 | |
| f-rank | 5 | 4 | 8 | 9 | 2 | 11 | 7 | 10 | 3 | 6 | 1 | |
| F9 | Mean | 3.52E+04 | 2.53E+04 | 3.13E+04 | 3.03E+04 | 1.85E+04 | 5.88E+04 | 5.83E+04 | 5.62E+04 | 3.34E+04 | 5.08E+04 | 2.31E+04 |
| Std | 6.78E+03 | 6.39E+03 | 9.06E+03 | 5.16E+03 | 4.73E+03 | 7.54E+03 | 1.73E+04 | 1.16E+04 | 2.64E+03 | 1.15E+04 | 3.24E+03 | |
| f-rank | 7 | 3 | 5 | 4 | 1 | 11 | 10 | 9 | 6 | 8 | 2 | |
| F10 | Mean | 2.37E+04 | 2.12E+04 | 1.71E+04 | 3.28E+04 | 2.27E+04 | 1.98E+04 | 2.10E+04 | 1.97E+04 | 1.73E+04 | 1.59E+04 | 1.57E+04 |
| Std | 1.91E+03 | 2.13E+03 | 2.22E+03 | 7.39E+02 | 1.78E+03 | 1.87E+03 | 1.38E+03 | 1.18E+03 | 1.30E+03 | 1.28E+03 | 1.38E+03 | |
| f-rank | 10 | 8 | 3 | 11 | 9 | 6 | 7 | 5 | 4 | 2 | 1 | |
| F11 | Mean | 6.81E+04 | 2.05E+04 | 3.48E+04 | 2.05E+05 | 4.50E+04 | 2.15E+05 | 1.09E+05 | 2.05E+05 | 4.66E+04 | 3.75E+04 | 2.66E+04 |
| Std | 1.56E+04 | 4.72E+03 | 2.84E+04 | 4.29E+04 | 9.96E+03 | 5.41E+04 | 1.94E+04 | 4.52E+04 | 1.06E+04 | 1.14E+04 | 6.41E+03 | |
| f-rank | 7 | 1 | 3 | 9 | 5 | 11 | 8 | 10 | 6 | 4 | 2 | |
| F12 | Mean | 4.80E+08 | 7.42E+08 | 2.68E+08 | 4.90E+10 | 9.37E+07 | 4.36E+10 | 5.24E+09 | 5.97E+09 | 6.34E+08 | 1.14E+09 | 5.17E+07 |
| Std | 4.79E+08 | 2.41E+08 | 1.85E+08 | 1.02E+10 | 3.81E+07 | 1.86E+10 | 1.63E+09 | 2.51E+09 | 2.29E+08 | 1.25E+09 | 2.16E+07 | |
| f-rank | 4 | 6 | 3 | 11 | 2 | 10 | 8 | 9 | 5 | 7 | 1 | |
| F13 | Mean | 1.23E+05 | 3.35E+06 | 1.74E+05 | 8.09E+09 | 1.62E+04 | 6.32E+09 | 8.05E+07 | 6.26E+07 | 5.27E+04 | 2.02E+07 | 4.76E+04 |
| Std | 8.11E+04 | 3.01E+06 | 7.79E+05 | 1.68E+09 | 4.97E+03 | 3.68E+09 | 8.32E+07 | 8.34E+07 | 2.32E+04 | 8.85E+07 | 7.38E+04 | |
| f-rank | 4 | 6 | 5 | 11 | 1 | 10 | 9 | 8 | 3 | 7 | 2 | |
| F14 | Mean | 5.17E+06 | 3.81E+06 | 1.86E+06 | 6.44E+07 | 4.91E+06 | 1.87E+07 | 1.95E+07 | 1.95E+07 | 3.69E+06 | 1.90E+06 | 1.16E+06 |
| Std | 2.36E+06 | 1.69E+06 | 1.01E+06 | 2.46E+07 | 2.76E+06 | 1.61E+07 | 9.59E+06 | 1.13E+07 | 1.78E+06 | 6.77E+05 | 5.22E+05 | |
| f-rank | 7 | 5 | 2 | 11 | 6 | 8 | 9 | 10 | 4 | 3 | 1 | |
| F15 | Mean | 2.33E+04 | 1.78E+05 | 1.67E+04 | 1.54E+09 | 5.60E+03 | 1.29E+09 | 1.53E+07 | 5.34E+06 | 5.68E+04 | 1.74E+04 | 9.29E+03 |
| Std | 1.36E+04 | 1.32E+05 | 1.47E+04 | 6.20E+08 | 3.11E+03 | 1.54E+09 | 4.13E+07 | 1.18E+07 | 2.69E+04 | 9.55E+03 | 3.35E+03 | |
| f-rank | 5 | 7 | 3 | 11 | 1 | 10 | 9 | 8 | 6 | 4 | 2 | |
| F16 | Mean | 6.91E+03 | 7.01E+03 | 6.72E+03 | 1.07E+04 | 5.96E+03 | 8.44E+03 | 8.19E+03 | 7.37E+03 | 6.59E+03 | 6.07E+03 | 5.62E+03 |
| Std | 9.98E+02 | 8.66E+02 | 8.50E+02 | 4.48E+02 | 8.09E+02 | 1.05E+03 | 9.34E+02 | 6.52E+02 | 6.09E+02 | 6.35E+02 | 6.12E+02 | |
| f-rank | 6 | 7 | 5 | 11 | 2 | 10 | 9 | 8 | 4 | 3 | 1 | |
| F17 | Mean | 5.24E+03 | 5.42E+03 | 6.43E+03 | 9.47E+03 | 4.97E+03 | 1.14E+04 | 6.68E+03 | 6.98E+03 | 5.49E+03 | 5.35E+03 | 5.17E+03 |
| Std | 7.07E+02 | 5.65E+02 | 7.32E+02 | 9.83E+02 | 5.21E+02 | 9.67E+03 | 5.94E+02 | 9.38E+02 | 5.22E+02 | 5.66E+02 | 5.69E+02 | |
| f-rank | 3 | 5 | 7 | 10 | 1 | 11 | 8 | 9 | 6 | 4 | 2 | |
| F18 | Mean | 5.15E+06 | 4.25E+06 | 2.83E+06 | 1.14E+08 | 5.46E+06 | 2.46E+07 | 1.91E+07 | 2.71E+07 | 5.01E+06 | 3.49E+06 | 2.52E+06 |
| Std | 2.78E+06 | 1.96E+06 | 1.39E+06 | 5.29E+07 | 2.38E+06 | 1.92E+07 | 7.92E+06 | 1.19E+07 | 3.84E+06 | 2.16E+06 | 7.85E+05 | |
| f-rank | 6 | 4 | 2 | 11 | 7 | 9 | 8 | 10 | 5 | 3 | 1 | |
| F19 | Mean | 7.77E+04 | 2.00E+06 | 2.62E+04 | 1.38E+09 | 4.81E+03 | 1.47E+09 | 1.50E+07 | 1.01E+07 | 6.98E+06 | 2.78E+06 | 6.60E+03 |
| Std | 2.00E+05 | 1.47E+06 | 3.14E+04 | 4.65E+08 | 2.71E+03 | 1.93E+09 | 1.41E+07 | 2.49E+02 | 9.22E+06 | 1.49E+07 | 5.41E+03 | |
| f-rank | 4 | 5 | 3 | 10 | 1 | 11 | 9 | 8 | 7 | 6 | 2 | |
| F20 | Mean | 5.74E+03 | 5.45E+03 | 5.84E+03 | 7.78E+03 | 5.33E+03 | 5.97E+03 | 6.04E+03 | 5.76E+03 | 5.23E+03 | 5.24E+03 | 4.82E+03 |
| Std | 5.75E+02 | 4.80E+02 | 4.42E+02 | 3.52E+02 | 5.38E+02 | 5.75E+02 | 5.15E+02 | 6.17E+02 | 4.97E+02 | 6.12E+02 | 6.05E+02 | |
| f-rank | 6 | 5 | 8 | 11 | 4 | 9 | 10 | 7 | 2 | 3 | 1 | |
| F21 | Mean | 3.01E+03 | 2.94E+03 | 3.90E+03 | 3.45E+03 | 2.83E+03 | 3.77E+03 | 3.39E+03 | 3.55E+03 | 3.08E+03 | 3.72E+03 | 2.73E+03 |
| Std | 1.13E+02 | 8.88E+01 | 2.11E+02 | 5.35E+01 | 8.33E+01 | 1.35E+02 | 1.23E+02 | 1.62E+02 | 9.78E+01 | 1.17E+02 | 6.98E+01 | |
| f-rank | 4 | 3 | 11 | 7 | 2 | 10 | 6 | 8 | 5 | 9 | 1 | |
| F22 | Mean | 2.63E+04 | 2.36E+04 | 2.08E+04 | 3.52E+04 | 2.61E+04 | 2.18E+04 | 2.36E+04 | 2.22E+04 | 1.69E+04 | 1.89E+04 | 1.50E+04 |
| Std | 1.66E+03 | 1.64E+03 | 2.12E+03 | 5.94E+02 | 2.19E+03 | 1.61E+03 | 1.53E+03 | 1.51E+03 | 7.95E+03 | 1.40E+03 | 7.27E+03 | |
| f-rank | 10 | 8 | 4 | 11 | 9 | 5 | 7 | 6 | 2 | 3 | 1 | |
| F23 | Mean | 3.40E+03 | 3.36E+03 | 4.63E+03 | 3.83E+03 | 3.24E+03 | 3.89E+03 | 3.83E+03 | 3.79E+03 | 3.59E+03 | 5.30E+03 | 3.21E+03 |
| Std | 8.37E+01 | 8.86E+01 | 2.72E+02 | 5.35E+01 | 6.27E+01 | 1.06E+02 | 1.10E+02 | 1.54E+02 | 1.15E+02 | 3.94E+02 | 9.11E+01 | |
| f-rank | 4 | 3 | 10 | 7 | 2 | 9 | 8 | 6 | 5 | 11 | 1 | |
| F24 | Mean | 3.91E+03 | 3.87E+03 | 5.59E+03 | 4.33E+03 | 3.74E+03 | 4.55E+03 | 4.55E+03 | 4.39E+03 | 3.98E+03 | 5.47E+03 | 3.69E+03 |
| Std | 1.13E+02 | 1.16E+02 | 3.95E+02 | 5.21E+01 | 7.83E+01 | 1.59E+02 | 2.18E+02 | 1.42E+02 | 7.98E+01 | 3.21E+02 | 1.06E+02 | |
| f-rank | 4 | 3 | 11 | 6 | 2 | 8 | 9 | 7 | 5 | 10 | 1 | |
| F25 | Mean | 4.49E+03 | 4.44E+03 | 4.4E+03 | 2.38E+04 | 3.83E+03 | 2.11E+04 | 7.97E+03 | 1.11E+04 | 4.23E+03 | 3.49E+03 | 3.62E+03 |
| Std | 3.09E+02 | 1.84E+02 | 3.11E+02 | 5.35E+03 | 9.48E+01 | 8.01E+03 | 9.31E+02 | 2.51E+03 | 1.97E+02 | 6.99E+01 | 7.34E+01 | |
| f-rank | 7 | 6 | 5 | 11 | 3 | 10 | 8 | 9 | 4 | 1 | 2 | |
| F26 | Mean | 1.48E+04 | 1.31E+04 | 2.71E+04 | 1.81E+04 | 1.17E+04 | 2.01E+04 | 1.91E+04 | 1.86E+04 | 1.41E+04 | 2.01E+04 | 1.11E+04 |
| Std | 2.36E+03 | 1.89E+03 | 3.15E+03 | 6.58E+02 | 2.09E+03 | 1.81E+03 | 2.01E+03 | 1.47E+03 | 1.35E+03 | 7.55E+03 | 4.72E+03 | |
| f-rank | 5 | 3 | 11 | 6 | 2 | 9 | 8 | 7 | 4 | 10 | 1 | |
| F27 | Mean | 3.68E+03 | 3.66E+03 | 4.19E+03 | 4.09E+03 | 3.57E+03 | 4.11E+03 | 4.09E+03 | 3.94E+03 | 3.83E+03 | 4.33E+03 | 3.55E+03 |
| Std | 7.95E+01 | 9.81E+01 | 1.97E+02 | 1.92E+02 | 7.86E+01 | 2.78E+02 | 1.81E+02 | 1.39E+02 | 1.07E+02 | 3.05E+02 | 6.27E+01 | |
| f-rank | 4 | 3 | 10 | 8 | 2 | 9 | 7 | 6 | 5 | 11 | 1 | |
| F28 | Mean | 5.38E+03 | 4.87E+03 | 5.83E+03 | 2.05E+04 | 4.16E+03 | 1.99E+04 | 1.75E+04 | 1.69E+04 | 5.23E+03 | 3.76E+03 | 3.71E+03 |
| Std | 5.75E+02 | 3.67E+02 | 1.13E+03 | 2.57E+03 | 2.24E+02 | 1.76E+03 | 3.37E+03 | 2.45E+03 | 4.82E+02 | 3.99E+02 | 6.81E+01 | |
| f-rank | 6 | 4 | 7 | 11 | 3 | 10 | 9 | 8 | 5 | 2 | 1 | |
| F29 | Mean | 7.75E+03 | 7.63E+03 | 8.76E+03 | 1.36E+04 | 6.81E+03 | 1.16E+04 | 9.52E+03 | 9.19E+03 | 9.79E+03 | 8.34E+03 | 6.86E+03 |
| Std | 6.09E+02 | 5.53E+02 | 6.40E+02 | 1.42E+03 | 6.22E+02 | 3.28E+03 | 7.00E+02 | 8.79E+02 | 1.09E+03 | 5.81E+02 | 7.36E+02 | |
| f-rank | 4 | 3 | 6 | 11 | 1 | 10 | 8 | 7 | 9 | 5 | 2 | |
| F30 | Mean | 2.05E+06 | 1.38E+07 | 3.05E+06 | 3.11E+09 | 2.25E+05 | 2.94E+09 | 7.68E+07 | 6.89E+07 | 1.16E+08 | 3.95E+07 | 1.88E+05 |
| Std | 1.22E+06 | 9.22E+06 | 2.54E+06 | 8.63E+08 | 1.21E+05 | 1.95E+09 | 4.32E+07 | 8.47E+07 | 7.68E+07 | 1.22E+08 | 1.23E+05 | |
| f-rank | 3 | 5 | 4 | 11 | 2 | 10 | 8 | 7 | 9 | 6 | 1 | |
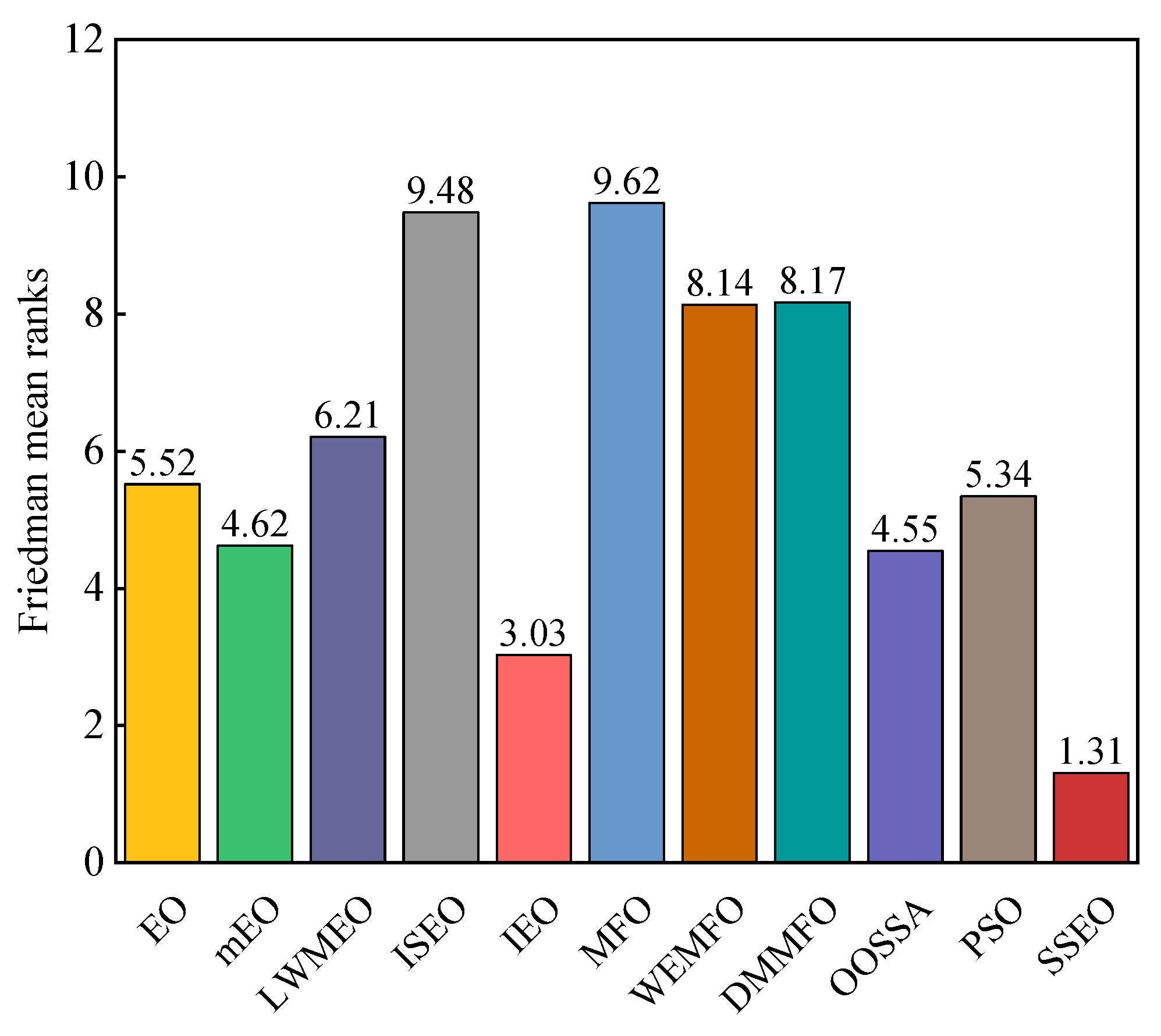
| Average f-rank | 5.5172 | 4.6207 | 6.2069 | 9.4828 | 3.0345 | 9.6207 | 8.1379 | 8.1724 | 4.5517 | 5.3448 | 1.3103 | |
| Overall f-rank | 6 | 4 | 7 | 10 | 2 | 11 | 8 | 9 | 3 | 5 | 1 |
| Function | EO p-Value | mEO p-Value | LWMEO p-Value | ISEO p-Value | IEO p-Value | MFO p-Value | WEMFO p-Value | DMMFO p-Value | OOSSA p-Value | PSO p-Value |
|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 2.15E−10 |
| F3 | 3.02E−11 | 3.83E−06 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.34E−11 | 3.02E−11 | 3.82E−09 | 3.02E−11 |
| F4 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.96E−10 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 9.47E−01 |
| F5 | 1.61E−10 | 1.86E−09 | 3.02E−11 | 3.02E−11 | 5.59E−01 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 9.26E−09 | 8.15E−11 |
| F6 | 4.44E−07 | 1.03E−06 | 3.02E−11 | 3.02E−11 | 2.67E−09 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 |
| F7 | 3.08E−08 | 5.09E−08 | 3.02E−11 | 4.50E−11 | 6.74E−01 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 5.61E−05 | 5.60E−07 |
| F8 | 6.72E−10 | 4.31E−08 | 3.69E−11 | 3.02E−11 | 1.44E−03 | 3.02E−11 | 3.69E−11 | 3.02E−11 | 8.48E−09 | 8.99E−11 |
| F9 | 1.41E−09 | 2.71E−01 | 3.01E−07 | 1.73E−07 | 1.68E−04 | 3.02E−11 | 6.70E−11 | 3.34E−11 | 1.10E−08 | 3.34E−11 |
| F10 | 3.02E−11 | 1.78E−10 | 1.03E−02 | 3.02E−11 | 3.34E−11 | 1.29E−09 | 5.49E−11 | 2.37E−10 | 9.92E−11 | 5.30E−01 |
| F11 | 3.69E−11 | 5.27E−05 | 6.10E−01 | 3.02E−11 | 4.57E−09 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 2.59E−05 |
| F12 | 3.02E−11 | 3.02E−11 | 3.20E−09 | 3.02E−11 | 4.42E−06 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.96E−10 |
| F13 | 5.97E−09 | 3.02E−11 | 5.90E−01 | 3.02E−11 | 2.19E−08 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 6.74E−06 | 2.42E−02 |
| F14 | 1.61E−10 | 2.87E−10 | 4.43E−03 | 3.02E−11 | 3.82E−10 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 4.98E−11 | 3.37E−05 |
| F15 | 4.11E−07 | 3.02E−11 | 2.89E−03 | 3.02E−11 | 3.83E−05 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 4.08E−11 | 2.60E−05 |
| F16 | 1.39E−06 | 2.38E−07 | 7.73E−06 | 3.02E−11 | 1.12E−05 | 3.69E−11 | 5.49E−11 | 7.39E−11 | 3.08E−08 | 1.08E−02 |
| F17 | 5.11E−01 | 1.09E−01 | 3.96E−08 | 3.02E−11 | 1.49E−01 | 3.34E−11 | 3.47E−10 | 2.92E−09 | 6.20E−04 | 3.48E−01 |
| F18 | 2.32E−06 | 3.37E−04 | 6.95E−01 | 3.02E−11 | 2.03E−07 | 3.34E−11 | 3.02E−11 | 3.02E−11 | 8.35E−08 | 2.81E−02 |
| F19 | 1.73E−06 | 3.02E−11 | 2.43E−05 | 3.02E−11 | 2.28E−01 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 4.35E−05 |
| F20 | 3.26E−07 | 1.17E−04 | 1.85E−08 | 3.02E−11 | 4.03E−03 | 2.83E−08 | 3.20E−09 | 1.49E−06 | 4.35E−05 | 2.15E−02 |
| F21 | 1.78E−10 | 9.76E−10 | 3.02E−11 | 3.02E−11 | 1.34E−05 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 |
| F22 | 3.69E−11 | 1.61E−10 | 1.64E−05 | 3.02E−11 | 3.69E−11 | 3.08E−08 | 1.96E−10 | 2.92E−09 | 4.11E−07 | 1.02E−01 |
| F23 | 1.01E−08 | 1.25E−07 | 3.02E−11 | 3.02E−11 | 4.68E−02 | 3.02E−11 | 3.02E−11 | 3.69E−11 | 3.34E−11 | 3.02E−11 |
| F24 | 6.52E−09 | 4.11E−07 | 3.02E−11 | 3.02E−11 | 2.71E−02 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.69E−11 | 3.02E−11 |
| F25 | 3.02E−11 | 3.02E−11 | 3.34E−11 | 3.02E−11 | 9.75E−10 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.25E−07 |
| F26 | 5.61E−05 | 4.03E−03 | 4.08E−11 | 1.07E−07 | 6.31E−01 | 5.97E−09 | 2.60E−08 | 3.65E−08 | 1.29E−06 | 2.96E−05 |
| F27 | 4.69E−08 | 1.25E−05 | 3.02E−11 | 3.02E−11 | 1.37E−01 | 3.34E−11 | 3.02E−11 | 4.51E−11 | 3.02E−11 | 3.02E−11 |
| F28 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.69E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 1.03E−02 |
| F29 | 1.43E−05 | 4.94E−05 | 5.07E−10 | 3.02E−11 | 9.35E−01 | 3.69E−11 | 4.98E−11 | 3.16E−10 | 3.02E−11 | 9.26E−09 |
| F30 | 4.08E−11 | 3.02E−11 | 4.08E−11 | 3.02E−11 | 9.05E−02 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 | 3.02E−11 |
| +/=/− | 28/1/0 | 29/0/0 | 26/3/0 | 29/0/0 | 24/4/1 | 29/0/0 | 29/0/0 | 29/0/0 | 29/0/0 | 27/2/0 |
| Algorithms | Parameters Setting |
|---|---|
| ABC [7] | Limit = 50 (Default) |
| PSO [8] | = 2, = 2, and linear reduction from 0.9 to 0.1 (Default) |
| GWO [9] | a linear reduction from 2 to 0 (Default) |
| FA [10] | g = 1, a = 0.2, r = 0.5 (Default) |
| SSA [13] | decreases nonlinearly from 2 to 0 (Default) |
| Terrain | No. | Initial | Final | X Axis | Y Axis | Obstacle Radius |
|---|---|---|---|---|---|---|
| Obstacle | Coordinates | Coordinates | ||||
| Map 1 | 3 | 0, 0 | 4, 6 | [1 1.8 4.5] | [1 5.0 0.9] | [0.8 1.5 1] |
| Map 2 | 6 | 0, 0 | 10, 10 | [1.5 8.5 3.2 6.0 1.2 7.0] | [4.5 6.5 2.5 3.5 1.5 8.0] | [1.5 0.9 0.4 0.6 0.8 0.6] |
| Map 3 | 13 | 3, 3 | 14, 14 | [1.5 4.0 1.2 5.2 9.5 6.5 10.8 | [4.5 3.0 1.5 3.7 10.3 7.3 6.3 | [0.5 0.4 0.4 0.8 0.7 0.7 0.7 0.7 |
| 5.9 3.4 8.6 11.6 3.3 11.8] | 9.9 5.6 8.2 8.6 11.5 11.5] | 0.7 0.7 0.7 0.7 0.7] | ||||
| Map 4 | 30 | 3, 3 | 14, 14 | [10.1 10.6 11.1 11.6 12.1 11.2 | [8.8 8.8 8.8 8.8 8.8 11.7 11.7 | [0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 |
| 11.7 12.2 12.7 13.2 11.4 11.9 | 11.7 11.7 11.7 9.3 9.3 9.3 9.3 | 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||
| 12.4 12.9 13.4 8 8.5 9 9.5 10 | 9.3 5.3 5.3 5.3 5.3 5.3 6.7 6.7 | 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||
| 9.3 9.8 10.3 10.8 11.3 5.9 6.4 | 6.7 6.7 6.7 8.4 8.4 8.4 8.4 8.4] | 0.4 0.4 0.4 0.4 0.4 0.4] | ||||
| 6.9 7.4 7.9] | ||||||
| Map 5 | 45 | 0, 0 | 15, 15 | [2 2 2 2 2 2 4 4 4 4 4 4 4 4 4 | [8 8.5 9 9.5 10 10.5 3 3.5 4 4.5 5 | [0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 |
| 6 6 6 8 8 8 8 8 8 8 8 8 10 10 | 5.5 6 6.5 7 11 11.5 12 1 1.5 2 2.5 | 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||
| 10 10 10 10 10 10 10 12 12 | 3 3.4 4 4.5 5 6 6.5 7 7.5 8 8.5 9 9.5 | 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||
| 12 12 12 14 14 14 14] | 10 10 10.5 11 11.5 12 10 10.5 11 11.5] | 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||
| 0.4 0.4 0.4 0.4 0.4 0.4 0.4 0.4 | ||||||
| 0.4 0.4 0.4 0.4 0.4] |
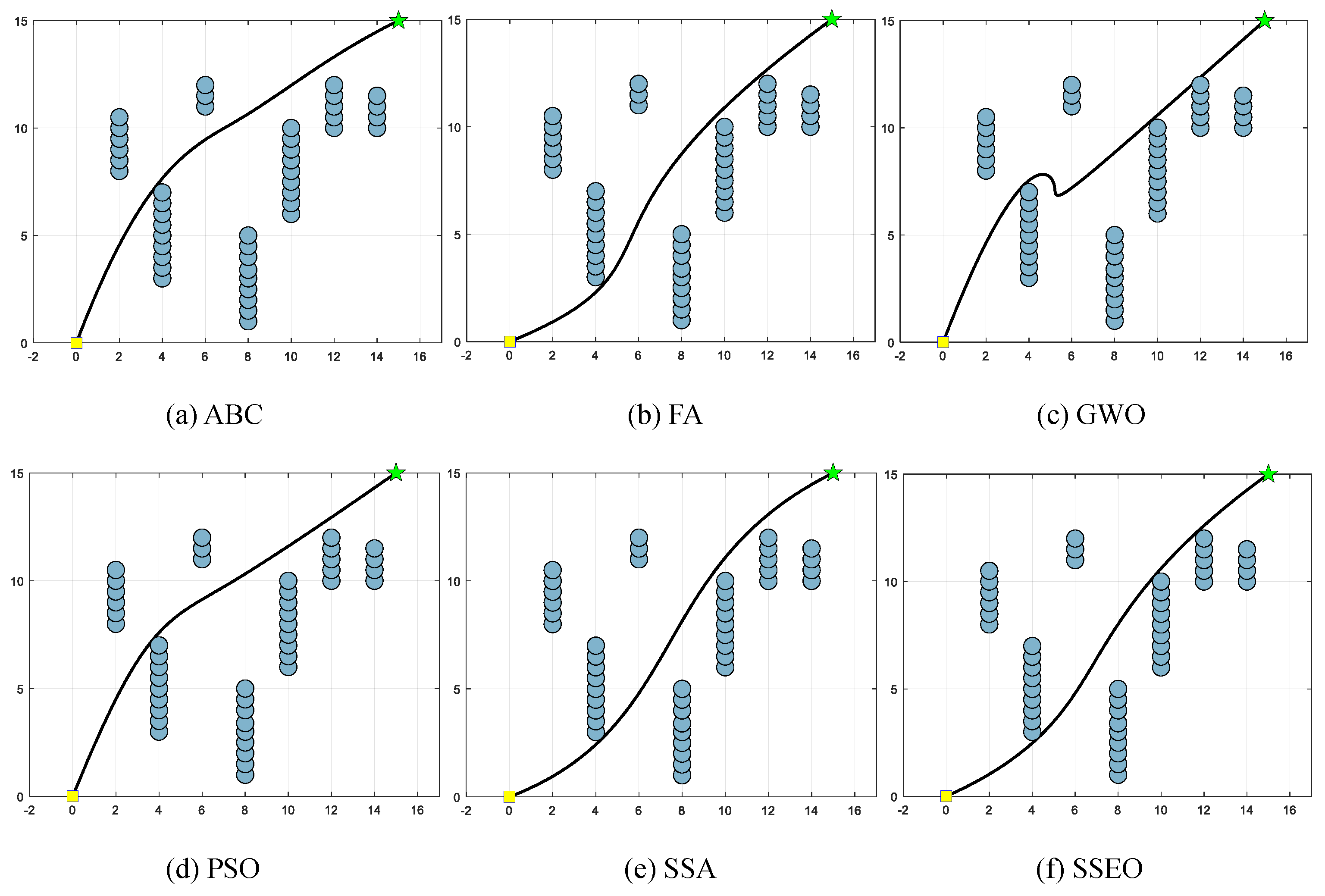
| Terrain | PSO | FA | ABC | GWO | SSA | SSEO |
|---|---|---|---|---|---|---|
| Path Length | Path Length | Path Length | Path Length | Path Length | Path Length | |
| Map 1 | 7.8497 | 7.6093 | 7.7471 | 7.7713 | 8.0469 | 7.4575 |
| Map 2 | 14.3354 | 14.5336 | 14.3881 | 14.4311 | 16.5022 | 14.3132 |
| Map 3 | 15.8629 | 15.866 | 16.9046 | 15.9311 | 16.2811 | 15.8597 |
| Map 4 | 16.2247 | 15.8489 | 15.7883 | 16.2379 | 16.2793 | 15.7398 |
| Map 5 | 21.9021 | 21.6739 | 21.9537 | 23.3205 | 21.6779 | 21.5298 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Liu, Y.; Wang, Z.; Jin, G.; Hu, P.; Dhiman, G. Adaptive Guided Equilibrium Optimizer with Spiral Search Mechanism to Solve Global Optimization Problems. Biomimetics 2023, 8, 383. https://doi.org/10.3390/biomimetics8050383
Ding H, Liu Y, Wang Z, Jin G, Hu P, Dhiman G. Adaptive Guided Equilibrium Optimizer with Spiral Search Mechanism to Solve Global Optimization Problems. Biomimetics. 2023; 8(5):383. https://doi.org/10.3390/biomimetics8050383
Chicago/Turabian StyleDing, Hongwei, Yuting Liu, Zongshan Wang, Gushen Jin, Peng Hu, and Gaurav Dhiman. 2023. "Adaptive Guided Equilibrium Optimizer with Spiral Search Mechanism to Solve Global Optimization Problems" Biomimetics 8, no. 5: 383. https://doi.org/10.3390/biomimetics8050383
APA StyleDing, H., Liu, Y., Wang, Z., Jin, G., Hu, P., & Dhiman, G. (2023). Adaptive Guided Equilibrium Optimizer with Spiral Search Mechanism to Solve Global Optimization Problems. Biomimetics, 8(5), 383. https://doi.org/10.3390/biomimetics8050383