1. Introduction
With the rapid development of large-scale network deployments, traditional wireless networks, such as Wi-Fi or cellular networks, have adopted a distributed architecture, where network intelligence is embedded in each access point or base station. This makes it difficult to manage and configure a network as a whole, especially in large-scale deployments. Software-Defined Networking (SDN) is an architectural approach that separates the control plane and data plane in network devices, thereby enabling centralized control and management of the network through a programmable software controller [
1,
2,
3,
4,
5]. Software-Defined Wireless Networking (SDWN) is a concept that extends the principles of SDNs to wireless communication networks, which apply these principles to wireless networks, enabling greater flexibility, scalability, and control over wireless infrastructure.
In SDWNs, similar to SDN, the control plane is separated from the data plane [
1,
2,
3,
4,
5,
6,
7,
8]. The control plane consists of a centralized software controller that manages and orchestrates the network resources, makes decisions about network policies and configurations, and dynamically controls the behavior of the wireless network infrastructure. The data plane comprises the wireless access points or base stations that handle the transmission and reception of data. The control plane of each forwarding device can only operate correctly when connected to SDWN-centralized controllers [
1,
2,
3,
4,
5,
6,
7,
8,
9].
With the continuous expansion of the scale of networks and user populations, an excessive number of network services may cause network congestion in SDWNs [
10,
11], which has provoked research into effectively controlling network congestion and stabilizing networks [
12,
13]. Congestion control is a crucial technology used in wireless networks to manage and prevent network congestion, employing congestion control mechanisms to regulate the sending rate when there is a high demand for wireless network resources that exceeds the available capacity. Congestion control technologies play a vital role in maintaining the stability, efficiency, and performance of wireless networks, thus ensuring that wireless network resources are utilized optimally. Stability congestion control, which is intended to maximize the throughput and enhance the stability of global networks, has drawn widespread attention and research interest [
14,
15]. Propagation latency and external disturbance are often considered to constitute two critical factors that affect global network stability. Propagation latency may lead to additional network costs and unreliability [
16], while the variability of external disturbance based on the relevant wireless characteristics leads to abrupt structural variations [
17]. Even if a wireless network is stable via stability congestion control, the global network may become unstable again because of these two factors and may not be able to maintain long-term stability.
Therefore, it is essential to restabilize SDWNs’ network parameters with optimal values to maintain long-term stability. Robust control, which maintains a global network under long-term control with propagation latency and external disturbance, is likely a solution with which to tackle this re-stabilization problem. Thus, robust congestion control is defined as a robust control scheme acting on network congestion in order to enable higher network efficiency and lower network congestion.
Some existing solutions favor the adoption of traditional network control methods to analyze the congestion control problem in SDWNs. A traditional network control system is modeled using stochastic network-induced latency [
18], in which the analytical study of network stability has been implemented to solve network-induced latency and design feedback control algorithms. In the SDWN architecture, a global network controller is responsible for the rate management of each OpenFlow device [
1,
2,
19,
20,
21,
22,
23]. In the separation of the control and data planes, control plane unification is implemented for different kinds of networks, including wired Internet Protocol (IP) networks [
5,
6,
8,
20,
23], Wavelength-Division Multiplexings (WDMs) [
24], and wireless networks [
25,
26,
27]. In recently published works, the AIMD adjustment scheme has been further optimized using Lyapunov–Krasovskii functionals for network congestion control in SDWNs [
28,
29]. In terms of the congestion control framework, the Additive-Increase Multiplicative-Decrease (AIMD) adjustment scheme is used to tackle network congestion control problems through the execution of proper source adjustments in SDWNs [
30,
31,
32]. In terms of robust control algorithms, various forwarding information control algorithms have been proposed through analyses of SDWN-centralized controllers with respect to improving network robustness and reacting to failures [
2,
23,
33,
34,
35]. In [
36,
37,
38], robust congestion control schemes have been proposed in order to achieve maximal network throughput in device-to-device paths by using Lyapunov–Krasovskii functionals. In terms of meta-heuristic optimization algorithms, several meta-heuristic optimization algorithms, such as the Social Spider Optimization (SSO) algorithm [
39], Bat Algorithm [
40], and Particle Swarm Optimization (PSO) algorithm [
41], have been utilized in wireless networks to greatly reduce the number of network data required to solve the network congestion problem [
42]. In this paper, we use the Whale Optimization Algorithm (WOA) to more effectively achieve optimization objectives using a new global scheduling strategy for solving the network congestion problem. The WOA algorithm, which simulates the foraging behavior of humpback whales, was first proposed in [
43]. It is often used to find the optimal solution for global optimization problems in various fields, among which those covered in reviews include engineering, clustering, classification, robot paths, image processing, networks, task scheduling, and other engineering applications [
44,
45,
46,
47,
48].
However, these solutions are limited by the following aspects.
- (i)
The control laws are separated from the centralized controllers but integrated into the forwarding devices in the form of flow tables;
- (ii)
An SDWN architecture with two kinds of propagation latency is seldom considered for robust congestion control;
- (iii)
The traditional theories are not compatible with the robust congestion control theory pertaining to SDWNs.
The major contributions of this paper are summarized as follows:
(i) First, we provide a novel sending rate adjustment model with propagation latency in device-to-device paths as the fundamental model in the forwarding layer. Then, we establish a closed-loop congestion control model with propagation latency in device–controller pairs as a supplementary model. The propagation latency strengthens the veracity of the stability analysis, and its influence is considered in both device-to-device paths and device–controller pairs from a global perspective. Moreover, we consider channel competition near the forwarding devices in order to more effectively design the congestion control model based on the broadcasting nature of the wireless medium.
(ii) We design a new, weighted, fair scheduling strategy to pre-set the control objective of the stability congestion control scheme in order to solve the global robust congestion problems faced by SDWNs, which is utilized to calculate the optimized values of network parameters. Moreover, external disturbance is also considered for robust congestion control. To eliminate external disturbance from the global network system, the stability congestion control model had to be converted into a robust congestion control model; consequently, the optimized status was maintained via the transformation of two closed-loop congestion control models into a normal robust control model.
(iii) An interdisciplinary effort is made to construct a robust congestion control scheme by combining stability analysis theory and congestion control principles in SDWNs. Exploiting the applicability of Lyapunov–Krasovskii functionals in stability analysis, this paper constructs novel optimized Lyapunov–Krasovskii functionals acting on the robust control model to achieve the desired global robust control system for solving network congestion.
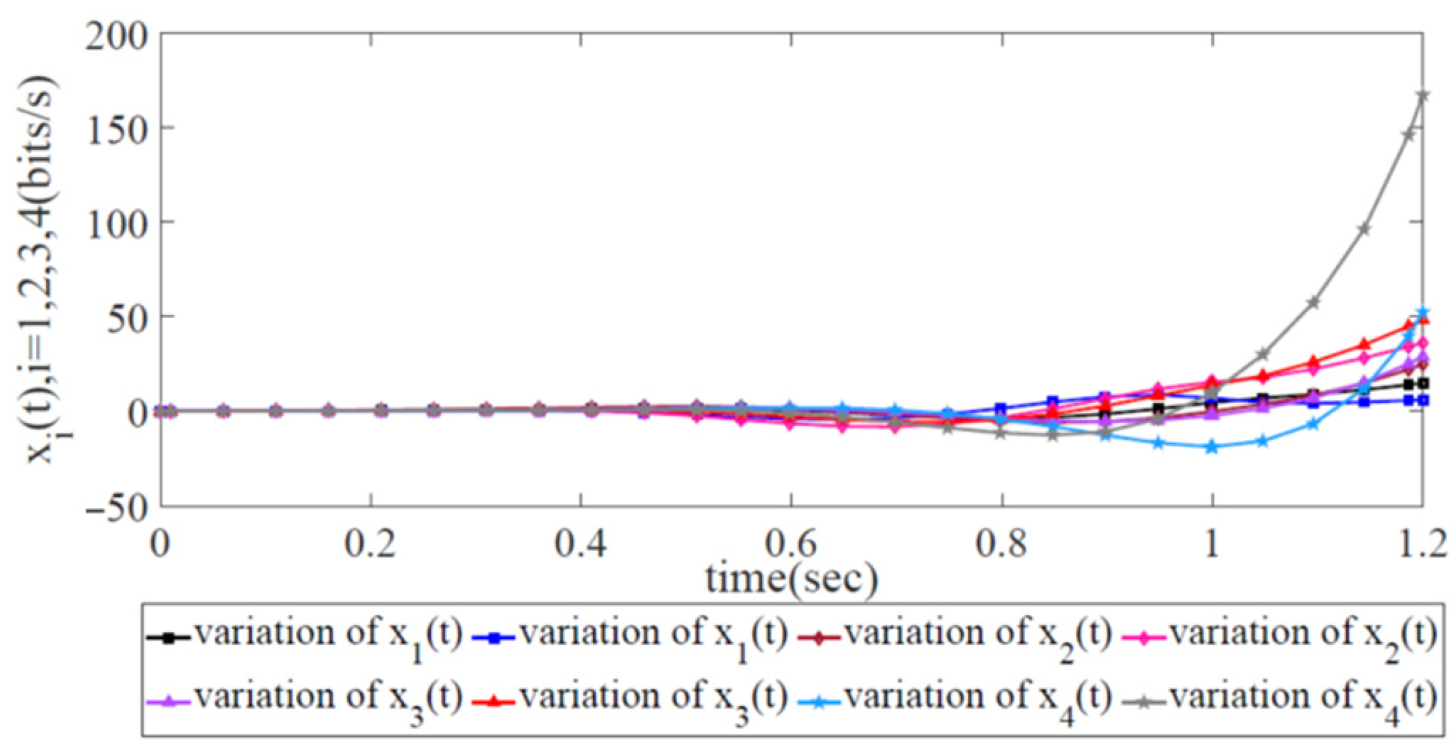
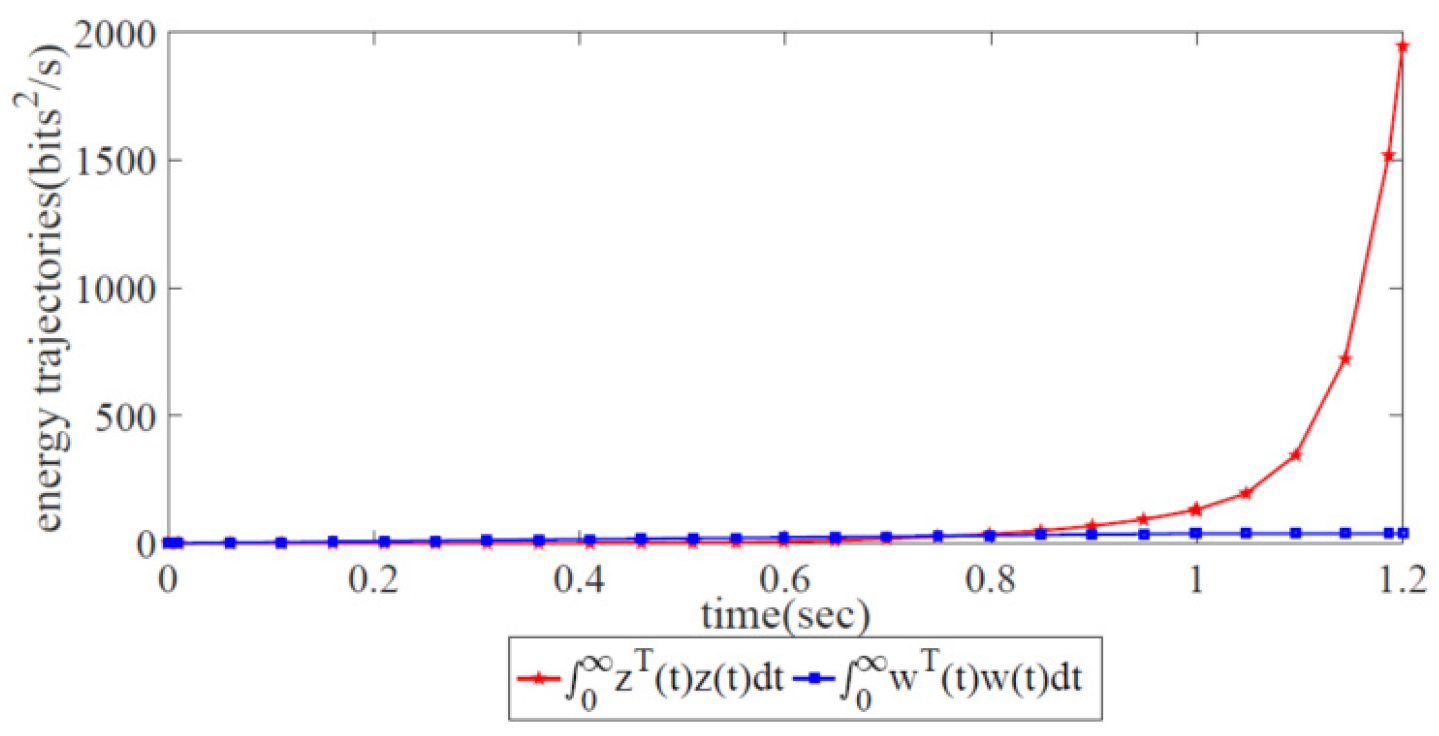
(iv) We design experiments on both the variations of error states and the energy trajectories for a robust control scheme implemented in the SDWN, including the AIMD adjustment scheme and the information-forwarding and control algorithm acting as benchmark algorithms. To evaluate the control performance, ablation experiments were conducted, which demonstrated the superiority of our proposed robust control scheme over the AIMD adjustment scheme and the information-forwarding and control algorithm with respect to maximizing the global SDWN throughput to maintain long-term stability with two kinds of propagation latencies and external disturbance.
In SDWNs, the forwarding devices first record their congestion state information and explicitly advertise it to the centralized controllers. The centralized controllers provide some control policies and send control instructions to the forwarding devices. Next, the forwarding devices follow these control instructions and make proper adjustments to the sending rates at the source-side. Previous works, such as [
36,
37,
38], studied the robust congestion control scheme with propagation latency in device–controller pairs, while this paper defines the propagation latency in both device–controller pairs and device-to-device paths as an upper bound of latency. Thus, two closed-loop congestion control models are established for the further research of the robust congestion control scheme. In our study, the AIMD adjustment scheme is still initially adopted to analyze network congestion with propagation latency in device–controller pairs, and two basic congestion control models are established. Next, a novel WOA-based scheduling strategy that considers each individual whale as a specific scheduling plan to allocate appropriate sending rates at the source side is proposed in the SDWN-centralized controllers to make proper adjustments in each forwarding device. Then, a novel robust congestion control model is proposed through the use of Lyapunov–Krasovskii functionals [
49,
50], and a theorem is proposed to determine the sufficient conditions for the robust control. These sufficient conditions are expressed as Linear Matrix Inequalities (LMIs). Finally, numerical instances are provided to demonstrate the effectiveness of our proposed scheme, which is able to more realistically analyze robust congestion control schemes under the influence of propagation latencies and external disturbance, over traditional schemes and those from previous works.
The following are also discussed in the remaining sections of this paper.
Section 2 presents a brief overview of related works. In
Section 3, an analytical network model, which was developed by implementing an AIMD adjustment scheme, is established to adjust the sending rate at the source side, and a WOA-based scheduling strategy that considers each individual whale as a specific scheduling plan to allocate appropriate sending rates at the source side is presented to address the error states of the sending rate.
Section 4 proposes a robust congestion control problem formulation, and some preliminaries are introduced.
Section 5 addresses network congestion control by using Lyapunov–Krasovskii functionals and calculates sufficient conditions.
Section 6 reports the results of a numerical network simulation to demonstrate the effectiveness of our proposed robust congestion control scheme, and comparisons with other congestion control approaches applied in SDWNs are also provided.
Section 7 presents the conclusions and directions for future work.
3. Model and Analysis
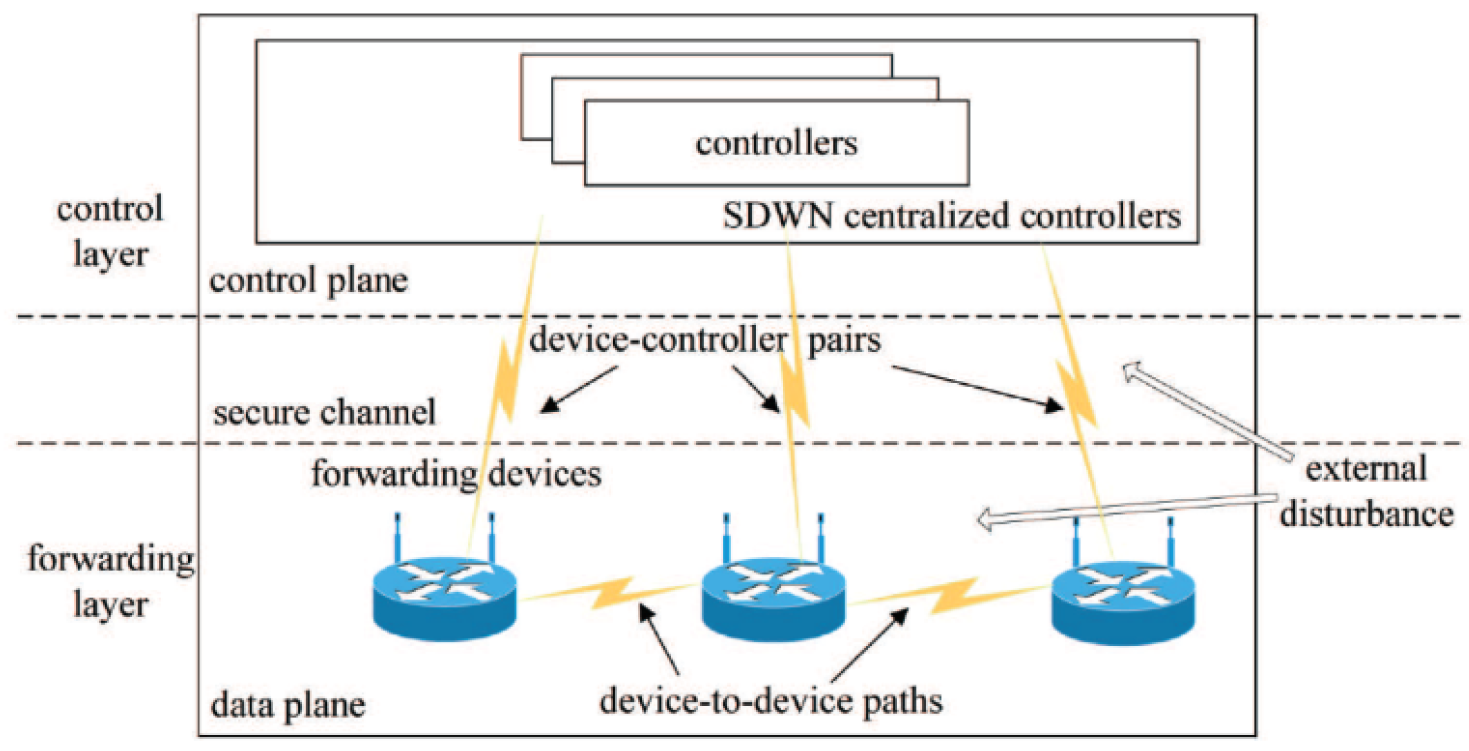
A typical SDWN architecture with two kinds of propagation latency is presented in
Figure 1. Two kinds of propagation latency exist in SDWN: (1) propagation latency in the device-to-device path, and (2) propagation latency in device–controller pairs, which divides the entirety of SDWN into two closed-loop networks for analyzing network congestion. SDWN-centralized controllers consist of a series of controllers with distributed designs for enhancing network reliability, scalability, and resiliency [
35]. The OpenFlow-based forwarding devices at the source side advertise their state information to the centralized controllers via a wireless channel and properly adjust their sending rates via the AIMD adjustment scheme after receiving the control instructions from the centralized controllers. These control instructions are provided to process individual network services by means of the WOA-based scheduling strategy. In order to maintain the network parameters’ long-term stability in the SDWN, this paper focuses on maximizing the global SDWN throughput and stabilizing global network parameters at their optimal values under the robust congestion control scheme with two kinds of propagation latency and external disturbance. Thus, a new WOA-based scheduling strategy that considers each individual whale as a specific scheduling plan to allocate appropriate sending rates at the source side is adopted to optimize global network performance by properly arranging the network parameters. There is an optimized stable state constituting a key network parameter in each forwarding device for the robust congestion control scheme.
The analysis of these two closed-loop congestion control systems is classified into four parts in the subsections below.
3.1. A Sending Rate Adjustment Model with Propagation Latency in Device-to-Device Paths
First, in order to analyze the sending rate adjustment at the source side, the following assumptions and definitions are proposed.
Assumption 1. There exist infinite flows at the source side that await transmission.
Definition 1. There exists an ideal queue length that has been verified as being capable of achieving the best performance with respect to the sending rate arrangement after multiple experiments.
Assumption 2. Define two queue lengths in any forwarding device, where one is the current queue length and the other is the ideal queue length . At the source side, the variation in the sending rate is represented as the difference of the queue length . If the difference value , the sending rate additively increases; otherwise, when , the sending rate multiplicatively decreases. The magnitude of the difference value positively correlates with the level of rate variation at the source side. An AIMD adjustment scheme is implemented in every forwarding device based on the difference value .
Assumption 3. The neighboring forwarding devices record their congestion state information and periodically send them to the SDWN-centralized controllers. Then, the centralized controllers optimize some control laws via the congestion state information and send them to the source-forwarding device according to the control instructions. We assume the existence of a local Congestion State (CS) value that is incorporated into the control instruction. This feedback control instruction shows the CS reflected in the current condition of the neighboring links in the whole round-trip. The CS is either non-positive (, i.e., no congestion occurred) or positive (, i.e., congestion occurred).
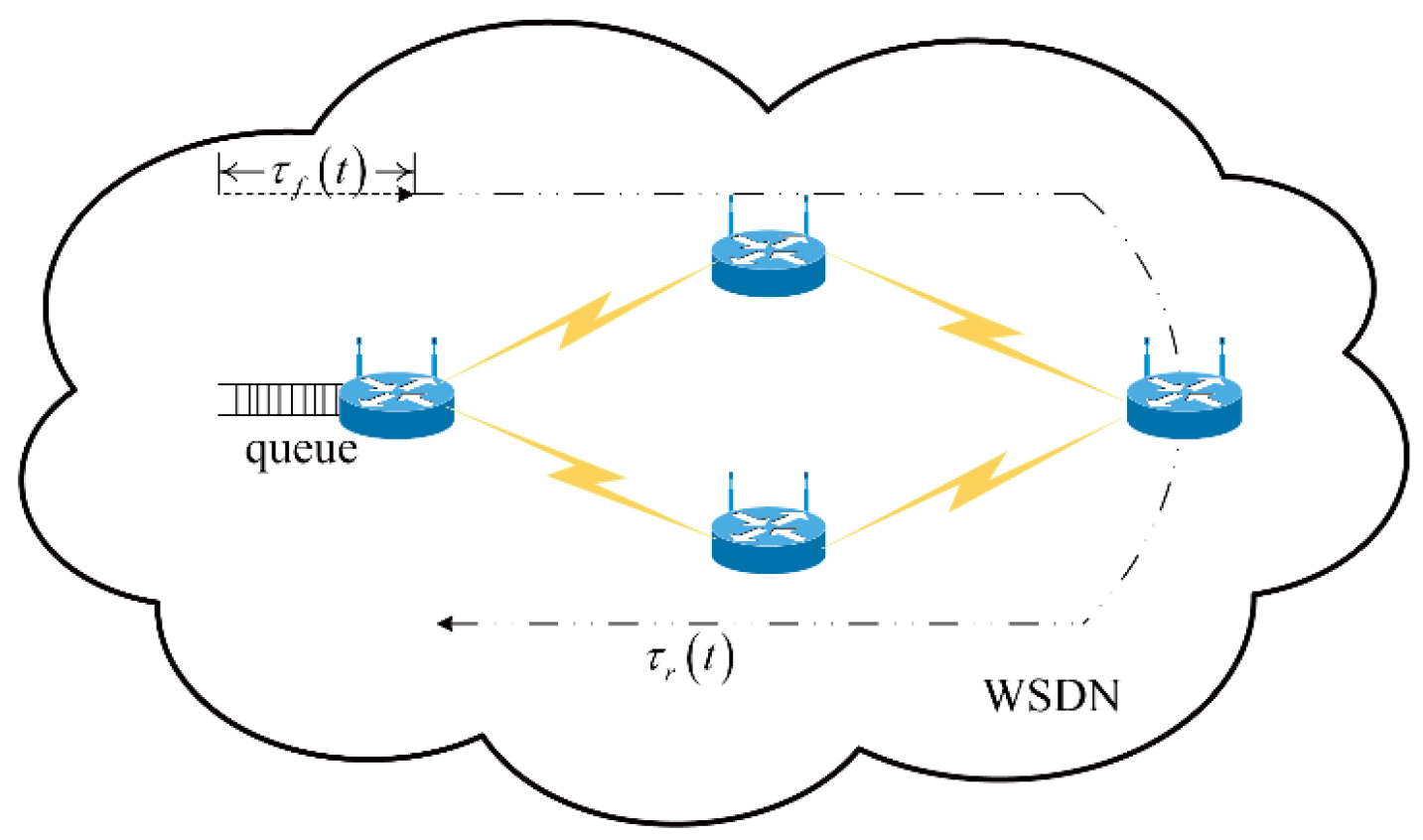
Figure 2 presents an example of the data transmission process with propagation latency in device-to-device paths in the SDWN, which can be modeled as a closed-loop congestion control system. By incorporating the CS feedback from the centralized controllers and using the AIMD adjustment scheme to tackle the congestion control problems, the AIMD parameters are analyzed, and the basic network congestion model is established as a linear continuous closed-loop congestion control system.
In the SDWN, the neighboring forwarding devices shift their congestion state information to the centralized controllers, in which the global network traffic state messages are concentrated. After an essential analysis, the centralized controllers optimize their control laws and make proper adjustments to every sending rate at the source side. If network congestion has occurred in the neighboring forwarding devices, said devices feed control instructions (CS > 0) back to the source forwarding devices within fixed time intervals to communicate the adjustments of the sending rates; when a state of non-congestion occurs in the neighboring forwarding devices, they feed control instructions (CS < 0) back.
At the source side, suppose that the CS occurs at the moment
, for which the time-varying sending rate is denoted as
.
and
denote process latency and forward channel propagation latency, respectively. Using the AIMD adjustment scheme, this section considers the fixed constant weight
as indicating an additive-increase and
as indicating a multiplicative-decrease, respectively. At the source side, if the CS is non-positive, the sending rate increases by weight
; otherwise, CS is positive, and the sending rate decreases by weight
. Thus, the behavioral equation can be expressed as follows:
Then, we obtain
where
is defined as a fixed constant weight,
.
is the sensitivity degree of the adjustment,
denotes the probability parameter,
represents instantaneous queue length, and
is the current moment.
Let
, and suppose
=
,
in an equilibrium state; thus, the following is yielded:
Eliminating
from (1) yields the second-order differential equation
where
are the parameters of this second-order system, and
denotes the round-trip of propagation latency from the source forwarding device to the destination. Note that the second-order dynamic Equation (2) can be rewritten in a matrix form, as follows.
Note that
are the weights of the network parameters. Thus, Equation (3) can be converted into
In this section, Equation (4), as the state variable equation, represents a closed-loop congestion control system, which utilizes an AIMD adjustment scheme at the source side after receiving state feedback. Obviously, the congestion control system shown in
Figure 2 can be modeled using Equation (4). Solving Equation (4) yields the solution to the congestion control problem.
3.2. A Closed-Loop Congestion Control Model with Propagation Latency in Device–Controller Pairs
As shown in
Figure 3, the propagation latency from a forwarding device to the centralized controllers (DC) and that from the centralized controllers to a forwarding device (CD) are defined as
and
, respectively. Assume that the centralized controllers can monitor
and that the forwarding devices can receive the CS from the centralized controllers with
. Let
, which is termed propagation latency in device–controller pairs.
When a flow joins the SDWN or is generated in an OpenFlow forwarding device, it is first placed in a queue, in which is waits to be processed and sent. When a communication channel is free, the centralized controllers establish a device-to-device path after receiving all communications from the whole network. Then, they design a control policy and sends the control instructions to adjust the sending rate at the source side. The whole process is described as follows.
First, the flow entry in the source forwarding device sends a complete or partial copy of the sending rate to the centralized controllers (a packet-in message). Next, the centralized controllers calculate the state of the forwarding device by means of the packet-in message, classify the global state information, and create a control policy to stabilize the sending rate. The control policy is utilized to re-stabilize the sending rate via control instructions . Then, the controllers adjust the weighted matrix (matrix , ) accordingly, where represents the completion of the flow (which generates the packet-in message) associated with the control instructions.
Therefore, the SDWN architecture with propagation latency in device–controller pairs can be modeled as
where
is the matrix of the network parameters.
Let the control instruction is denote control strength, and the control instruction be represented as where is the control input in the forwarding device, and is the sample time at moment . Rewrite as where denotes the entirety of propagation latency in the device–controller pairs.
Substitute
into Equation (5); consequently, the SDWN architecture with propagation latency in device–controller pairs becomes a linear closed-loop congestion control system.
3.3. Effect of Channel Competition from Neighboring Forwarding Devices
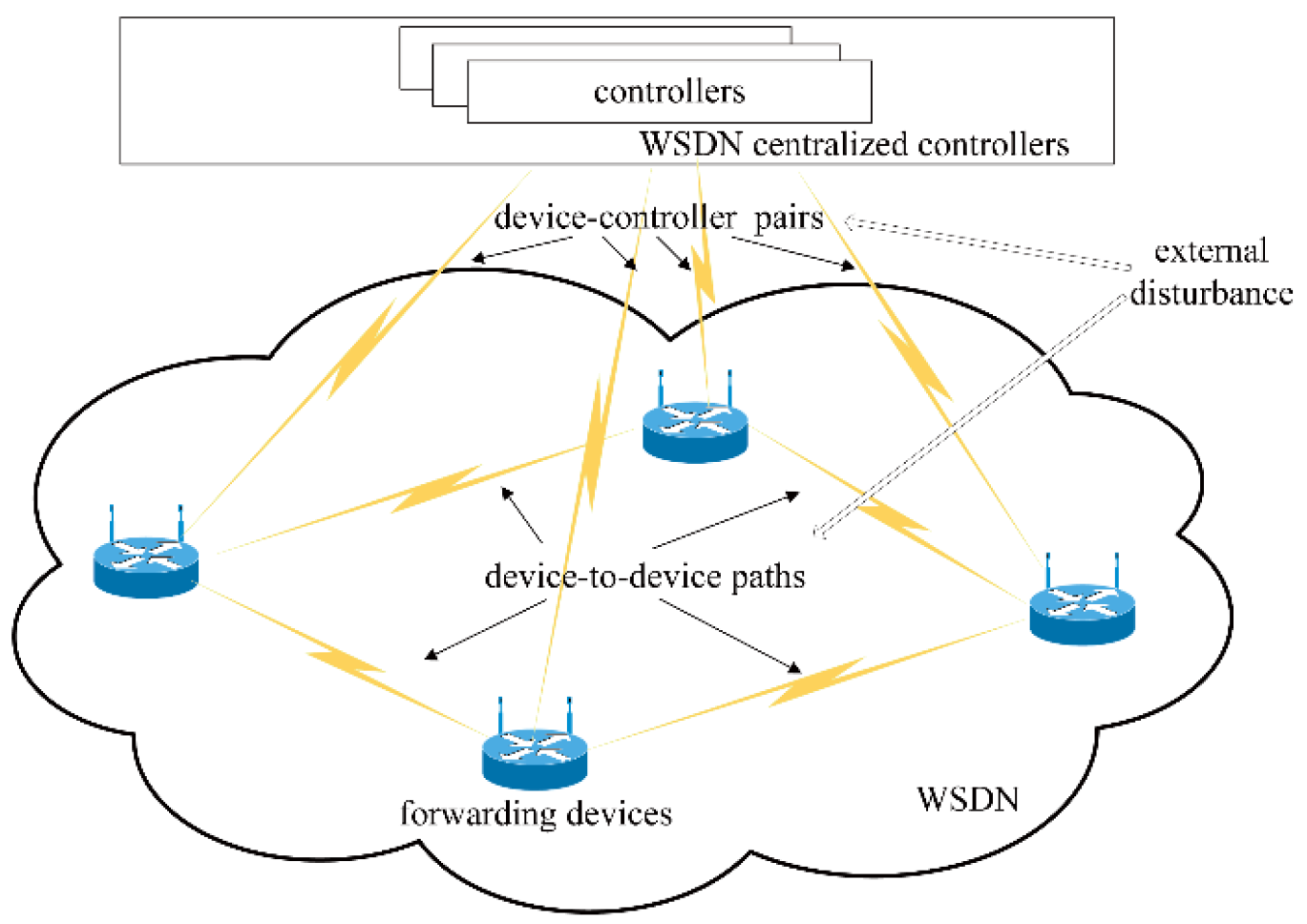
The problem of wireless channel competition is a critical issue impacting the sending rate adjustment at the source side in the SDWN. The centralized controllers contain information on global topology. Due to the broadcasting nature of the wireless medium, the forwarding devices cannot use and occupy the same wireless channel at the same moment. The other forwarding devices around the source forwarding device may contain data that can be transmitted simultaneously. Thus, every forwarding device needs to compete for the shared channel in order to send data, as shown in
Figure 4. Optimizing the sending rates of the different source forwarding devices is essential in a period of channel competition. By centralizing control in the SDWN, the effect of coupling connection is reflected in the control instructions received from the centralized controllers. All network information is aggregated, and the control laws are designed in the centralized controllers to control network congestion.
Figure 4 shows an instance of channel competition in the SDWN. When there are data that have been sent from the forwarding device A to the forwarding device B, A provides updated information to the centralized controllers. At this moment, forwarding device C communicates with forwarding device D, occupying the wireless channel. Thus, forwarding device A receives the control instructions and must wait until the wireless channel is free. Meanwhile, when forwarding device E coupled with forwarding device F also have data to transmit, they must also compete with forwarding device A. The centralized controllers require all information and make proper adjustments of the control laws of the different forwarding devices, which feed this information back to the forwarding devices via the control instructions.
Assumption 4. The coupled forwarding devices are defined as the reciprocal channel effect in SDWNs. The whole network is diffusively coupled, and all network information is sent to the centralized controllers. Define as the Laplace coupling matrix, whose diagonal elements are considered to correspond to . This represents the network topology of the global SDWN. If there is a connection between forwarding device and (i.e., and are neighbors), ; otherwise, . The row sum of is zero. The whole SDWN is connected, and matrix is irreducible.
Based on the Laplace coupling matrix
in Assumption 4, the control policies
in the forwarding device
that represent the topology relationship between all neighbor forwarding devices can be described as follows
where appropriate dimensions
,
denote the coupling weights of the proper adjustments. The information on global network topology and wireless channel competition with propagation latency in the device-to-device path
is used to update the information sent to the centralized controllers. Then, the centralized controllers send the control instructions to the forwarding device at the source side based on analyzing the global network topology and wireless channel competition with a global view.
Therefore, all control instructions in the centralized controllers are expressed by Equation (7) to implement stable congestion control in the SDWN, which consists of topology information and the influence of the other forwarding devices with propagation latency in device-to-device paths.
Now, when the forwarding device at the source side receives the control instructions from the centralized controllers, the propagation latency in the device–controller pairs
must be considered. This means that the forwarding device makes an adjustment in latency
behind the centralized controllers sending the control instructions. Additionally, considering the presence of external disturbance, this closed-loop congestion control model can be converted into a robust control model. In addition, by combining Equations (4) with (6) as a data transmission process model and considering the global topology expressed by Equation (7), the linear closed-loop SDWN architecture incorporating the external disturbance can be described as follows
where
is the weight of the network parameters, and
is the weight of the external disturbance. Let
and
.
Therefore, the congestion control system with two kinds of propagation latencies is converted into a robust congestion control model, which can be modeled by Equation (8).
3.4. A WOA-Based Scheduling Strategy Designed to Maximize Global SDWN Throughput
This section describes a WOA-based scheduling strategy designed to maximize global SDWN throughput, which can be non-preemptively pre-set to determine the network parameters of each forwarding device stabilization process.
3.4.1. Whale Optimization Algorithm
First, the WOA algorithm, used as a preliminary strategy, is briefly introduced as follows. The WOA is a meta-heuristic optimization algorithm that simulates the foraging behavior of humpback whales, including their encircling of prey, bubble-net attacking strategies, and prey detection behavior [
37,
38,
39,
40].
Encircling Prey
Humpback whales have the capacity to identify the location of prey and hem them in. Owing to the optimal position designed such that it is not a priori, this paper assumes that the current best candidate solution is the location of prey. Each whale tries to update their position with respect to approaching to the prey. This foraging behavior can be modeled as follows.
where
indicates the
th iteration,
and
are coefficient vectors, the position vector of prey
signifies the best solution,
is the position vector,
presents the absolute value, and
represents Hadamard’s product of vectors. In addition,
should be updated in each iteration if there is a better solution.
The vectors
and
are described as follows.
where
is a random vector, and
is convergence vector from 2 to 0 with the iterations.
where
is the maximum number of the iterations.
Bubble-Net Attacking
Figure 5 presents an image of the humpback whale’s hunting strategy, in which it prefers to attack its prey close to the surface. It swims down, generates bubbles in a spiral shape around its prey, and then dives up toward the surface to consume them.
While engaging in this foraging behavior, the whale generates distinctive bubbles arranged in a circle, including a coral loop, a lobtail, and a capture loop.
The WOA can be divided into two approaches:
By analyzing the value of , our study can mathematically model the foraging behavior of a humpback whale.
- 2.
Spiral Updating Position
By calculating the distance between the current position of the whale and the location of its prey, this approach mathematically simulates the whale’s foraging behavior, which can be expressed as follows.
where
represents the distance of the
th whale to its prey;
, as a constant, indicates the shape of the logarithmic spiral; and
is a random number. It has been reported that the whale swims around the prey within a shrinking circle and along a spiral-shaped path simultaneously.
Then, we assume that both the shrinking encircling mechanism and the spiral updating position can be selected with a probability of to optimize the position of the whale.
Therefore, the bubble-net attacking method can be modelled as follows
where
is a random value.
Search for Prey
As discussed in the above-mentioned analysis, the variation of the vector
is considered to be a critical parameter with respect to the random search for prey according to the position of each whale. Consequently, the whale should be forced to move far away from a reference position if
. The position of the whale is updated according to a randomly selected whale rather than the best solution, for which a global search is performed. The model is described as follows.
where
is a random position vector of a whale, which is selected from the current population.
3.4.2. The Details of the WOA-Based Scheduling Strategy
The centralized controllers are considered to constitute a criterion device, in which a scheduling problem must be pre-set in order to solve the network congestion problem. Hence, each individual whale is considered to represent a specific scheduling plan in order to allocate appropriate sending rates at the source side based on the control instructions from the centralized controllers. After multiple iterations, the optimal individual whale output is selected as the best scheduling scheme according to an evaluation of the effectiveness of each scheduling scheme.
Ideally, the sending rate in each forwarding device remains stable and needs to be optimized under congestion control in order to maximize the global SDWN throughput with limited wireless network resources.
The specific steps of the WOA-based scheduling strategy are as follows.
Step 1. Represent the number of whales as for defining all specific scheduling plans and consider a set of forwarding devices that has a maximum processing capacity of . Suppose that only levels of the sending rate exist at the source side with a weight .
Step 2. Configurate a set of data flows waiting to be processed at the moment . All of them must be processed and then transmitted to the destination.
Step 3. Suppose that and ignore the process latency of the forwarding devices to simplify the optimized scheduling model.
Step 4. Process each data flow using a series of forwarding devices (not all forwarding devices). Thus, define the processing data flow of these forwarding devices as , for which the maximum process capability is , respectively.
Step 5. To maximize the global throughput, the optimized whale with an appropriate ideal rate of each forwarding device is denoted as . Define .
Therefore, the optimization problem can be described as follows.
The optimized whale with an appropriate ideal rate of forwarding devices can be set under the above-mentioned constraints before data transmission in Equation (9). Initially, the optimized problem of maximizing the global SDWN throughput can be easily solved, and an uncomplicated allocated weighted proportion is defined as an ideal, optimized pre-set state by calculating each . Therefore, the WOA-based scheduling strategy has been presented to pre-set the goal of the stability congestion control scheme.
Based on the above-mentioned analysis, the stability congestion control model can be established. Then, external disturbance is incorporated to convert the stability congestion control model into a robust congestion control model in order to develop our global robust congestion control algorithm.
Remark 1. In this section, our study utilizes the WOA algorithm to implement the weighted fair scheduling strategy, which provides the control target of maximizing the global SDWN throughput for stability congestion control. The WOA algorithm can obtain solutions of required precision due to its low computational complexity and time consumption. Furthermore, a WOA algorithm that must be pre-set only provides the goal of the robust congestion control before executing the robust congestion control algorithm, which means that the WOA algorithm cannot be used in discussion regarding robust control performance.
4. Problem Formulation of Robust Congestion Control
This section proposes a continuous, robust congestion control scheme with two kinds of propagation latencies in the SDWN. Its specific steps are as follows.
Step 1. The AIMD adjustment scheme is analyzed based on the congestion control system with propagation latency in device-to-device paths, and the values and are calculated after receiving the CS at the source side.
Step 2. A closed-loop congestion control model with propagation latency in device–controller pairs is proposed, and the data transmission process model is analyzed to provide decisions regarding control instructions in the centralized controllers.
Step 3. The effect of channel competition between neighboring forwarding devices is analyzed. Based on the global network topology and considering the effect of channel competition, all control instructions in the centralized controllers are expressed to stabilize congestion control.
Step 4. The WOA-based scheduling strategy is analyzed to calculate each optimized parameter value , and the target of the congestion control stability procedure is proposed in order to maximize the global SDWN throughput.
Step 5. Based on the first four steps, the stability congestion control model is established. Then, external disturbance is accounted for to convert the stability congestion control model into a robust congestion control model.
Step 6. A novel, robust control model is proposed to solve the robust congestion control model, thereby necessitating the determination of a robustness condition.
At the current stage, this paper focuses on establishing the robust control model and determining its robustness condition, which are introduced in the following two subsections.
4.1. Sending Rates at Source Side Approaching the Ideal Optimized Rates
Our study first considers the sending rates at the source side approaching the ideal optimized rates for establishing the robust control model. By means of optimized scheduling, the data flows are assigned for maximizing the throughput of global SDWN under the aforementioned satisfactory conditions. Then, the problem becomes keeping the optimization model network stable in the SDWN, which maintains an allocated weighted proportion at the source side according to the ideal optimized state . If the global SDWN achieves robustness, it is stable at the maximal network throughput influenced by propagation latencies and external disturbance. Therefore, when is calculated and achieved, the sending rate of each forwarding device needs to approach its value.
It is preferred to keep the ideal optimized state stable under robust congestion control. The sending rate of each forwarding device needs to be unified as follows: ( which means ).
To unify the sending rates at the source side, the variable
is defined as the error state. Thus, the robust congestion control system (modeled by Equation (8)) can be converted into a global error system of the robust congestion control, which is described below:
4.2. Robust H∞ Control Model
Our study also considers the linear closed-loop SDWN with two kinds of propagation latency and external disturbance as the robust
control model, which is described as follows.
where
is the error state denoting the state of the difference between the real-time state and the ideal optimized pre-set state;
represents the control instruction in the centralized controllers;
is the controlled output, which can reflect the energy trajectory;
is the external disturbance with a covariance matrix equal to
and expectation equal to zero; and
as the continuous time satisfies
where
, and
are constants.
At this stage, definitions required for the analysis of the robust control model are provided as follows.
Definition 2. There exists a description of the energy relation between the controlled output and the external disturbance output . By considering the real SDWN, the energy relationship of these two outputs is believed to be , where is a prescribed positive scalar. This shows that the energy of the external disturbance has been absorbed after being controlled, which implies that robust control has been achieved.
Lemma 1 (Kronecker product):
Let denote the notation of Kronecker product. Accordingly, the following properties are satisfied in appropriate dimensions:
- (i)
- (ii)
- (iii)
Lemma 2 [
51]:
For any matrix and a vector function , if the integrals concerned are well defined, the following inequality holds: Lemma 3 [
52]:
For any matrices , and with , and a vector function , if the integrals concerned are well defined, then the following inequality holds: Lemma 4 [
53]:
For any matrix and a differentiable signal in , the following inequality holds:where Lemma 5 [
54]:
Let be a differentiable function: . For symmetric matrices and , and any matrices and satisfying the following inequality holds:whereand is similarly defined in Lemma 4. 

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}