
Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm

 , ,
, ,
Abstract
1. Introduction
- 1.
- A novel swarm-based algorithm for solving the optimal path planning problem of the mobile robot, named as ISSA-DWA, is proposed by combining several advanced strategies in this paper.
- 2.
- In the proposed ISSA-DWA method, the Cauchy reverse learning theory is used to enrich the diversity of sparrow population to avoid the algorithm falling into premature maturity.
- 3.
- In order to solve the problem of the weak search ability in the later iterations of the SSA, the sine–cosine algorithm is used to update the location of the producers so as to balance the exploration and exploitation capability of the algorithm.
- 4.
- Since the SSA is prone to fall into local optimal solutions, the Lévy flight strategy is used to update the scroungers’ position in the ISSA-DWA, which could increase the probability of jumping out of the local optimum.
- 5.
- An improved azimuth evaluation function is proposed in the ISSA-DWA. Combined with the optimal path point information given by the ISSA, the proposed ISSA-DWA makes the mobile robot move smoothly to the optimal path.
- 6.
- The experimental results and analysis show that the proposed ISSA-DWA is more competitive in solving the optimal path planning problem of mobile robot.
2. Standard Sparrow Search Algorithm
- 1.
- The initial population of the standard SSA is generated at random, and there are several issues existing, including an uneven distribution of the population and poor diversity. In the subsequent iterations, this will lead to an insufficient search scope, low quality of the initial solution and slow convergence speed of the algorithm.
- 2.
- The update method of the producers’ location of the standard SSA is poor, where it is unable to balance both the exploration and exploitation capability. The dimensions of producers will decrease slowly in the later iteration, which will lead to a decline in its search ability and slow convergence speed.
- 3.
- Since the standard SSA algorithm iterates for a specific amount of times, if the fitness value of the producers stayed constant, the producers will become the scroungers and the algorithm will fall into the local optimum easily.
3. Improved Sparrow Search Algorithm
- 1.
- Pointing at the disadvantages of the standard SSA, such as an insufficient population distribution and population diversity, Cauchy reverse learning was used to initialize the sparrow population, which enriches the diversity of the sparrow population and improves the quality of the initial solution of the algorithm.
- 2.
- Aiming at the problem of the poor update method of the producers’ location, the sine–cosine algorithm and dynamic learning factor were used to balance both the exploration and exploitation capability.
- 3.
- To solve the problem of it being easy for the standard SSA to fall into the local optimum, the Lévy flight strategy was used to update the position of the scroungers and increase the probability of the algorithm jumping out of the local optimal solution.
3.1. Cauchy Reverse Learning
3.2. Sine–Cosine Algorithm
3.3. Lévy Flight Strategy
3.4. Path Optimization Strategy
4. Dynamic Window Approach and Its Improvements
4.1. Standard Dynamic Window Approach
4.1.1. A Mobile Robot Model
4.1.2. Velocity Sampling
- 1.
- Restricted by the maximum and minimum velocity of the robot’s own model:
- 2.
- Limited by the safe distance between the robot and the obstruction:
- 3.
- Limited by the performance of the robot’s motors:
4.1.3. Evaluation Function
4.2. Improved Dynamic Window Approach
4.2.1. Algorithm Fusion
| Algorithm 1: ISSA-DWA pseudo code |
Input: Warning value: R2. Safety value: ST. The number of sparrow populations: n. The maximum number of iterations: itermax. The initial number of producers: PDNumber. The initial number of sparrows in charge of vigilance: SDNumber. The parameters of the DWA: Output: The smooth optimal trajectory.
|
4.2.2. Complexity Analysis
5. Experiments and Analysis
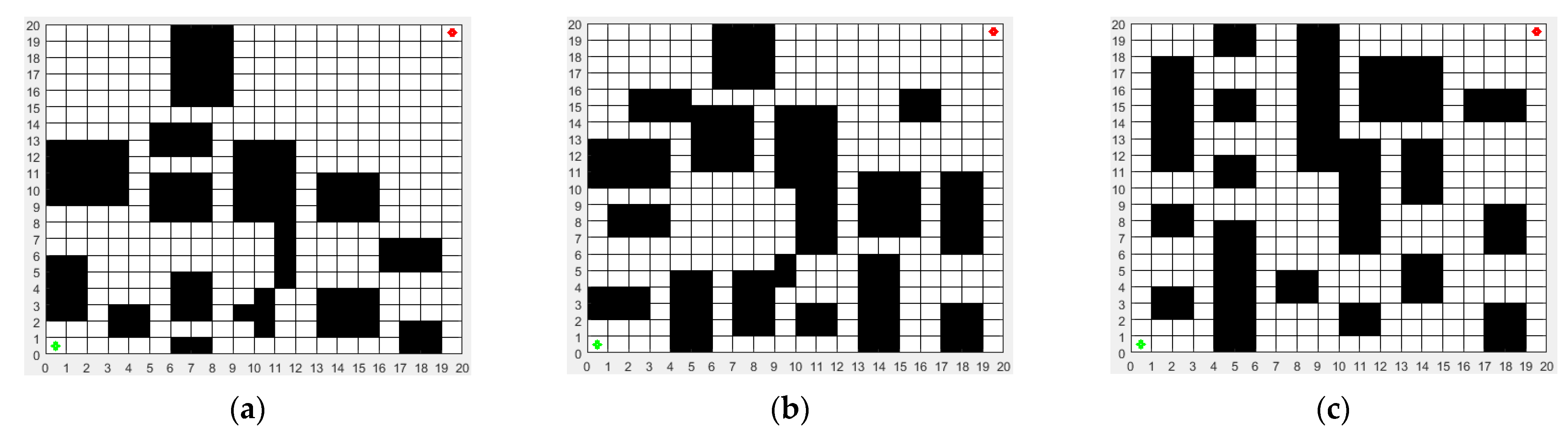
5.1. Experimental Environment Construction
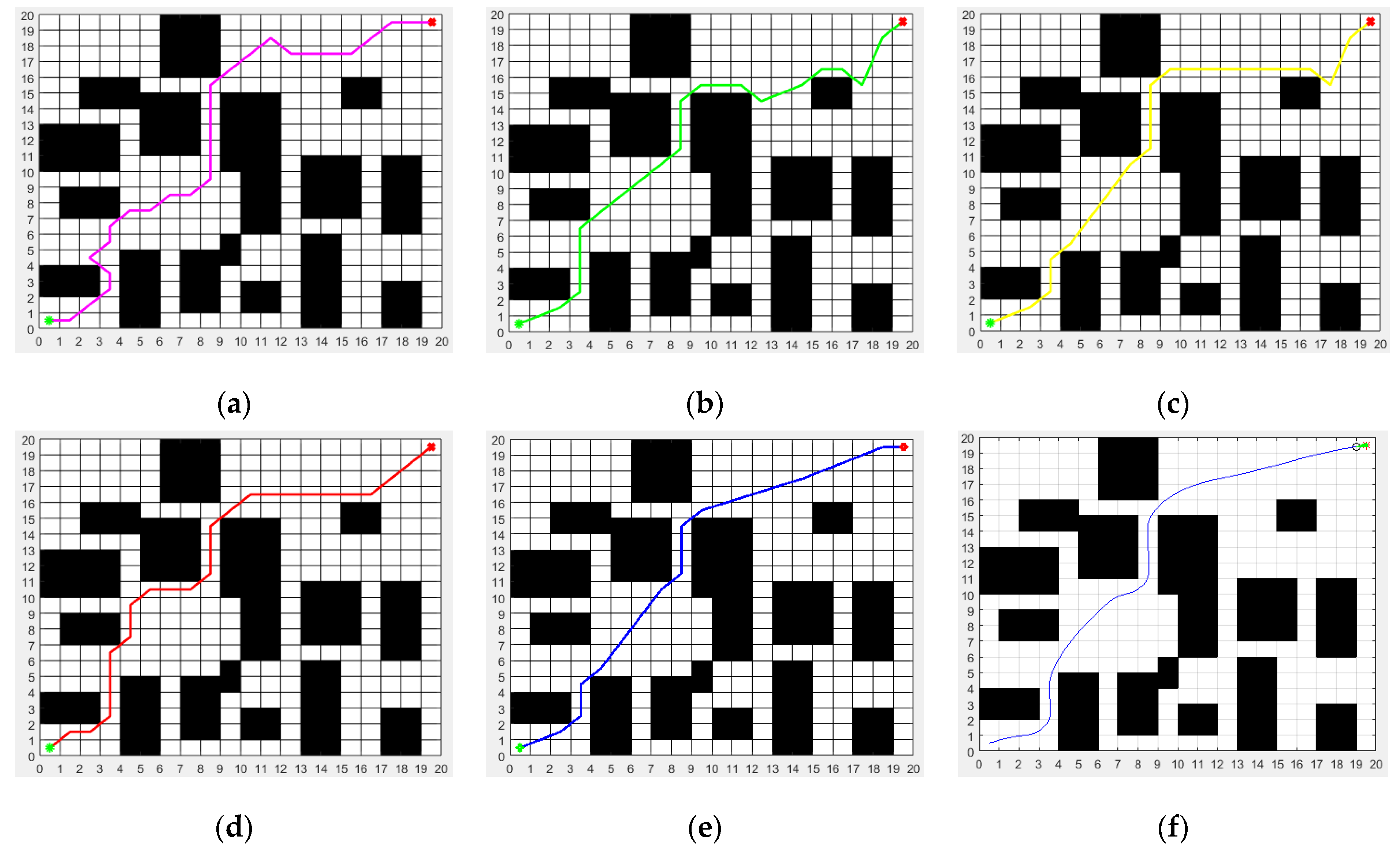
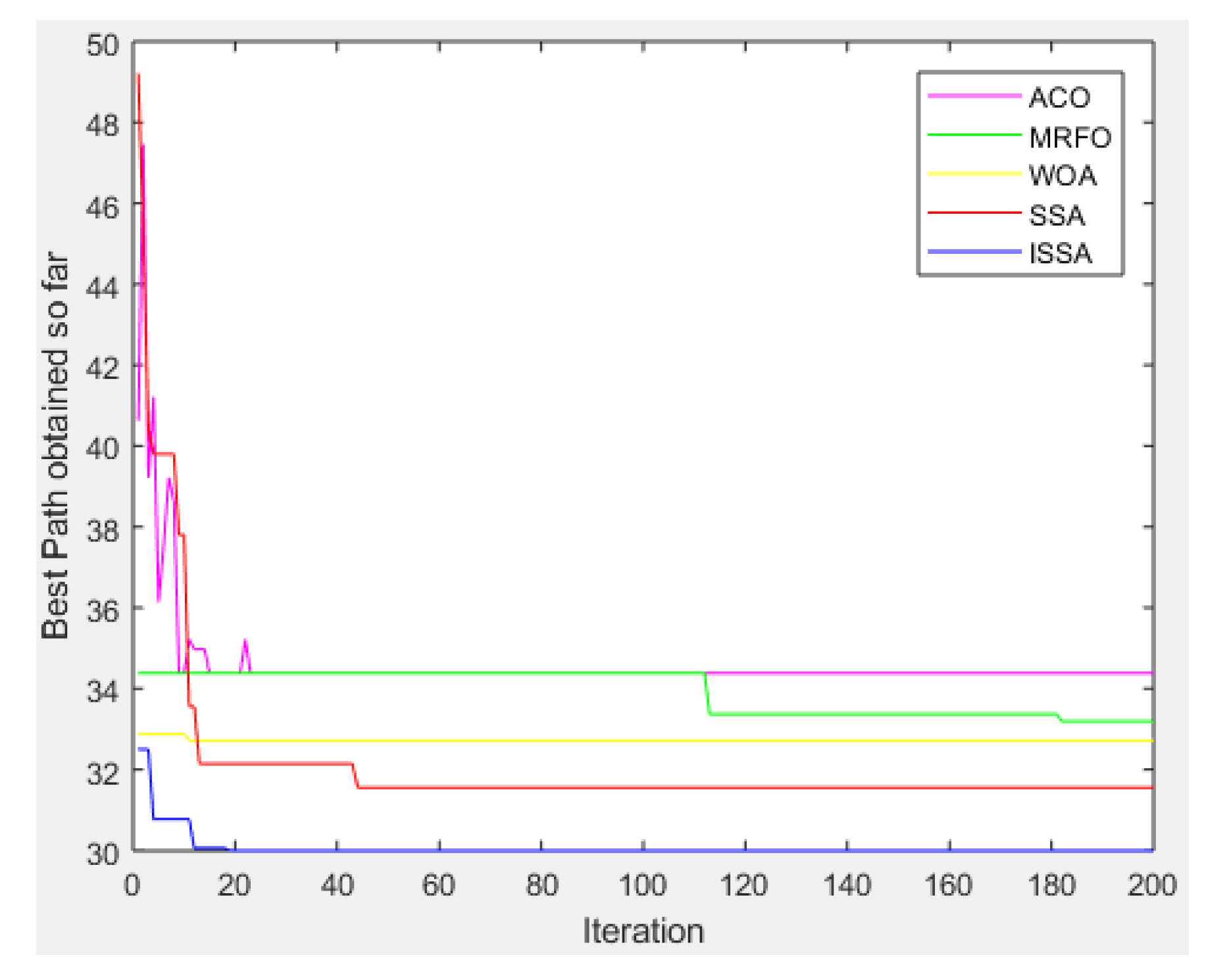
5.2. Static Obstacle Avoidance Experiment
5.3. Dynamic Obstacle Avoidance Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sánchez-Ibáñez, J.R.; Pérez-del-Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef]
- Zhu, D.-D.; Sun, J.-Q. A New Algorithm Based on Dijkstra for Vehicle Path Planning Considering Intersection Attribute. IEEE Access 2021, 9, 19761–19775. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, J.; Dai, J.; He, C. Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 236, 72–81. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, H.; Cai, P.; Lan, X.; Wu, D. Multi-point traversal path planning of manipulator based on improved RRT algorithm. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019. [Google Scholar]
- Cao, K.; Cheng, Q.; Gao, S.; Chen, Y.; Chen, C. Improved PRM for Path Planning in Narrow Passages. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019. [Google Scholar]
- Chen, Z.; Xu, B. AGV Path Planning Based on Improved Artificial Potential Field Method. In Proceedings of the 2021 IEEE International Conference on Power Electronics, Computer Applications (ICPECA), Shenyang, China, 22–24 January 2021. [Google Scholar]
- Liu, T.; Yan, R.; Wei, G.; Sun, L. Local Path Planning Algorithm for Blind-guiding Robot Based on Improved DWA Algorithm. In Proceedings of the 31th China Control and Decision-Making Conference (2019CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Huang, Y.; Xie, Q.; Wang, X. Research on Path Planning for Reducing Vibration Fatigue of Precision Equipment Transportation. J. Comput. Inf. Sci. Eng. 2022, 22, 011009. [Google Scholar] [CrossRef]
- Ju, C.; Luo, Q.; Yan, X. Path Planning Using an Improved A-star Algorithm. In Proceedings of the 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), Jinan, China, 23–25 October 2020. [Google Scholar]
- Zhang, J.; Liu, Z.; Wang, Y.; Zhang, F.; Li, Y. Research on Effective Path Planning Algorithm Based on Improved A* Algorithm. Proc. J. Phys. Conf. Ser. 2022, 2188, 012014. [Google Scholar] [CrossRef]
- Wang, H.; Li, G.; Hou, J.; Chen, L.; Hu, N. A Path Planning Method for Underground Intelligent Vehicles Based on an Improved RRT* Algorithm. Electronics 2022, 11, 294. [Google Scholar] [CrossRef]
- Kamil, A.R.M.; Shithil, S.M.; Ismail, Z.H.; Mahmud, M.S.A.; Faudzi, A.A.M. Path Planning Based on Inflated Medial Axis and Probabilistic Roadmap for Duct Environment. In Computational Intelligence in Machine Learning; Springer Nature: Singapore, 2022; pp. 441–449. [Google Scholar] [CrossRef]
- Liang, Q.; Zhou, H.; Xiong, W.; Zhou, L. Improved artificial potential field method for UAV path planning. In Proceedings of the 2022 14th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 15–16 January 2022; pp. 657–660. [Google Scholar]
- Li, X.; Hu, X.; Wang, Z.; Du, Z. Path Planning Based on Combinaion of Improved A-STAR Algorithm and DWA Algorithm. In Proceedings of the 2020 2nd International Conference on Artificial Intelligence and Advanced Manufacture (AIAM), Manchester, UK, 15–17 October 2020. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stützle, T. Ant Colony Optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Li, Y.; Guo, D.; Qin, W. Research on Manipulator Path Planning Based on PSO Algorithm. In Proceedings of 2021 Chinese Intelligent Systems Conference; Lecture notes in electrical engineering; Springer: Singapore, 2022. [Google Scholar]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Guo, J.L.; Yang, H.; Wang, Z.Q.; Liu, H.L. Research on navigation of bidirectional A* algorithm based on ant colony algorithm. J. Supercomput. 2021, 77, 1958–1975. [Google Scholar] [CrossRef]
- Yu, J.; Deng, W.; Zhao, Z.; Wang, X.; Shen, Z. A Hybrid Path Planning Method for an Unmanned Cruise Ship in Water Quality Sampling. IEEE Access 2019, 7, 87127–87140. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Z.; Wang, J.; Dong, Z. A Hybrid Path Planning and Formation Control Strategy of Multi-Robots in a Dynamic Environment. J. Adv. Comput. Intell. Intell. Inform. 2022, 26, 342–354. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. Open Access J. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Hu, C.; Deng, M.; Zhu, D. A Learning Vector Particle Swarm Algorithm Incorporating Sparrow for UAV Path Planning. Int. J. Swarm Intell. Res. 2022, 13, 1–20. [Google Scholar] [CrossRef]
- Lee, Y.D.; Lin, W.C.; Jiang, J.L.; Cai, J.H.; Huang, W.T.; Yao, K.C. Optimal Individual Phase Voltage Regulation Strategies in Active Distribution Networks with High PV Penetration Using the Sparrow Search Algorithm. Energies 2021, 14, 8370. [Google Scholar] [CrossRef]
- Jia, J.; Yuan, S.; Shi, Y.; Wen, J.; Pang, X.; Zeng, J. Improved sparrow search algorithm optimization deep extreme learning machine for lithium-ion battery state-of-health prediction. iScience 2022, 25, 103988. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Ngo, T.G.; Dao, T.K.; Nguyen, T. Microgrid Operations Planning Based on Improving the Flying Sparrow Search Algorithm. Symmetry 2022, 14, 168. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Wang, Q.; Yang, S. Dynamic path planning for AGV based on Tent chaotic sparrow search algorithm. In Proceedings of the 2021 International Conference on Information Control, Electrical Engineering and Rail Transit (ICEERT), Lanzhou, China, 30 October–1 November 2021. [Google Scholar]
- Yu, W.; Liu, J.; Zhou, J. A Novel Sparrow Particle Swarm Algorithm (SPSA) for Unmanned Aerial Vehicle Path Planning. Sci. Program. 2021, 2021, 5158304. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, E. A Random Opposition-Based Sparrow Search Algorithm for Path Planning Problem. In Artificial Intelligence. CICAI 2021; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Ouyang, C.; Zhu, D.; Wang, F. A Learning Sparrow Search Algorithm. Comput. Intell. Neurosci. 2021, 2021, 3946958. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Zhang, Y.; Li, M.; Zhang, Z.; Shang, J. Multi-UAV Path Planning Based on Fusion of Sparrow Search Algorithm and Improved Bioinspired Neural Network. IEEE Access 2021, 9, 124670–124681. [Google Scholar] [CrossRef]
- Li, F.; Lin, Y.; Zou, L.; Zhong, L. Improved Sparrow Search Algorithm applied to path planning of mobile robot. In Proceedings of the 2021 International Conference on Computer Information Science and Artificial Intelligence (CISAI), Kunming, China, 17–19 September 2021. [Google Scholar]
- Zhang, Z.; He, R.; Yang, K. A bioinspired path planning approach for mobile robots based on improved sparrow search algorithm. Adv. Manuf. 2022, 10, 114–130. [Google Scholar] [CrossRef]
- Feng, W.T.; Deng, B. A Cauchy Reverse Whale Optimization Algorithm Based on Cross Selection. Chin. J. Weapon. Equip. Eng. 2020, 41, 131–137. [Google Scholar]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mao, Q.H.; Zhang, Q.; Mao, C.C.; Bai, J.X. Hybrid Sine-Cosine Algorithm and Lévy Flying Sparrow Algorithm. J. Shanxi Univ. (Nat. Sci. Ed.) 2021, 44, 1086–1091. [Google Scholar]
- Houssein, E.H.; Saad, M.R.; Hashim, F.A.; Shaban, H.; Hassaballah, M. Lévy flight distribution: A new metaheuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 94, 103731. [Google Scholar] [CrossRef]
- Fareh, R.; Baziyad, M.; Rabie, T.; Bettayeb, M. Enhancing Path Quality of Real-Time Path Planning Algorithms for Mobile Robots: A Sequential Linear Paths Approach. IEEE Access 2020, 8, 167090–167104. [Google Scholar] [CrossRef]
- Seder, M.; Petrović, I. Dynamic window based approach to mobile robot motion control in the presence of moving obstacles. In Proceedings of the IEEE International Conference on Robotics & Automation, Rome, Italy, 10–14 April 2007. [Google Scholar]
- Liu, L.; Yao, J.; He, D.; Chen, J.; Guo, J. Global Dynamic Path Planning Fusion Algorithm Combining Jump-A* Algorithm and Dynamic Window Approach. IEEE Access 2021, 9, 19632–19638. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ENV. Model | Index | Path Length (m) | Turning Times | Smoothness (smt) | Execution Time (s) | |
|---|---|---|---|---|---|---|
| Algorithm | ||||||
| ENV. 1 | ACO | 32.971 | 17 | 0.271 | 21.053 | |
| MRFO | 32.419 | 9 | 0.114 | 3.651 | ||
| WOA | 31.921 | 11 | 0.345 | 6.966 | ||
| SSA | 32.142 | 14 | 0.281 | 1.956 | ||
| ISSA | 28.438 | 4 | 0.092 | 1.075 | ||
| ENV. 2 | ACO | 34.385 | 11 | 0.337 | 18.633 | |
| MRFO | 33.191 | 13 | 0.144 | 1.957 | ||
| WOA | 32.715 | 11 | 0.111 | 7.257 | ||
| SSA | 31.556 | 14 | 0.282 | 2.838 | ||
| ISSA | 29.992 | 7 | 0.096 | 1.157 | ||
| ENV. 3 | ACO | 40.042 | 16 | 0.349 | 20.202 | |
| MRFO | 35.126 | 12 | 0.194 | 1.913 | ||
| WOA | 36.792 | 14 | 0.193 | 6.911 | ||
| SSA | 37.799 | 17 | 0.408 | 2.233 | ||
| ISSA | 34.541 | 7 | 0.189 | 1.121 | ||
| ENV. Model | ENV. 1 | ENV. 2 | ENV. 3 | |
|---|---|---|---|---|
| Avoidance Index | ||||
| distance (m) | 1.632 | 1.423 | 1.125 | |
| time-consumption (s) | 6.528 | 4.312 | 4.125 | |
| angle (°) | 20.125 | 40.523 | 55.684 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Liang, J.; Guo, K.; Ke, C.; He, D.; Chen, J. Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics 2023, 8, 182. https://doi.org/10.3390/biomimetics8020182
Liu L, Liang J, Guo K, Ke C, He D, Chen J. Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics. 2023; 8(2):182. https://doi.org/10.3390/biomimetics8020182
Chicago/Turabian StyleLiu, Lisang, Jingrun Liang, Kaiqi Guo, Chengyang Ke, Dongwei He, and Jian Chen. 2023. "Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm" Biomimetics 8, no. 2: 182. https://doi.org/10.3390/biomimetics8020182
APA StyleLiu, L., Liang, J., Guo, K., Ke, C., He, D., & Chen, J. (2023). Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics, 8(2), 182. https://doi.org/10.3390/biomimetics8020182