

Analysis of UAV Thermal Soaring via Hawk-Inspired Swarm Interaction


Abstract
1. Introduction
2. Methodology
2.1. Problem Statement
2.2. Agent Model
2.3. Thermal Updraft Model
2.4. Map Parameters
2.5. Simulation Infrastructure
2.6. Agent Behavior Model
2.7. Simulation Hardware
3. Results
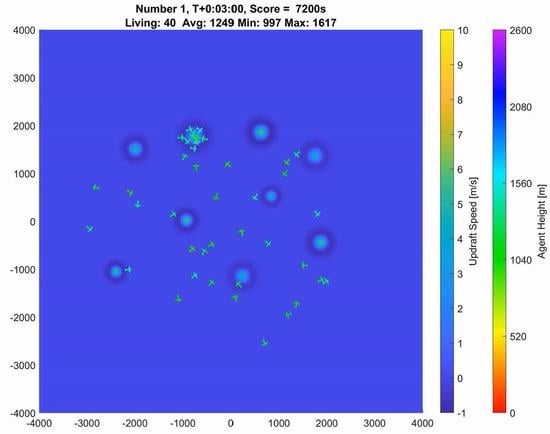
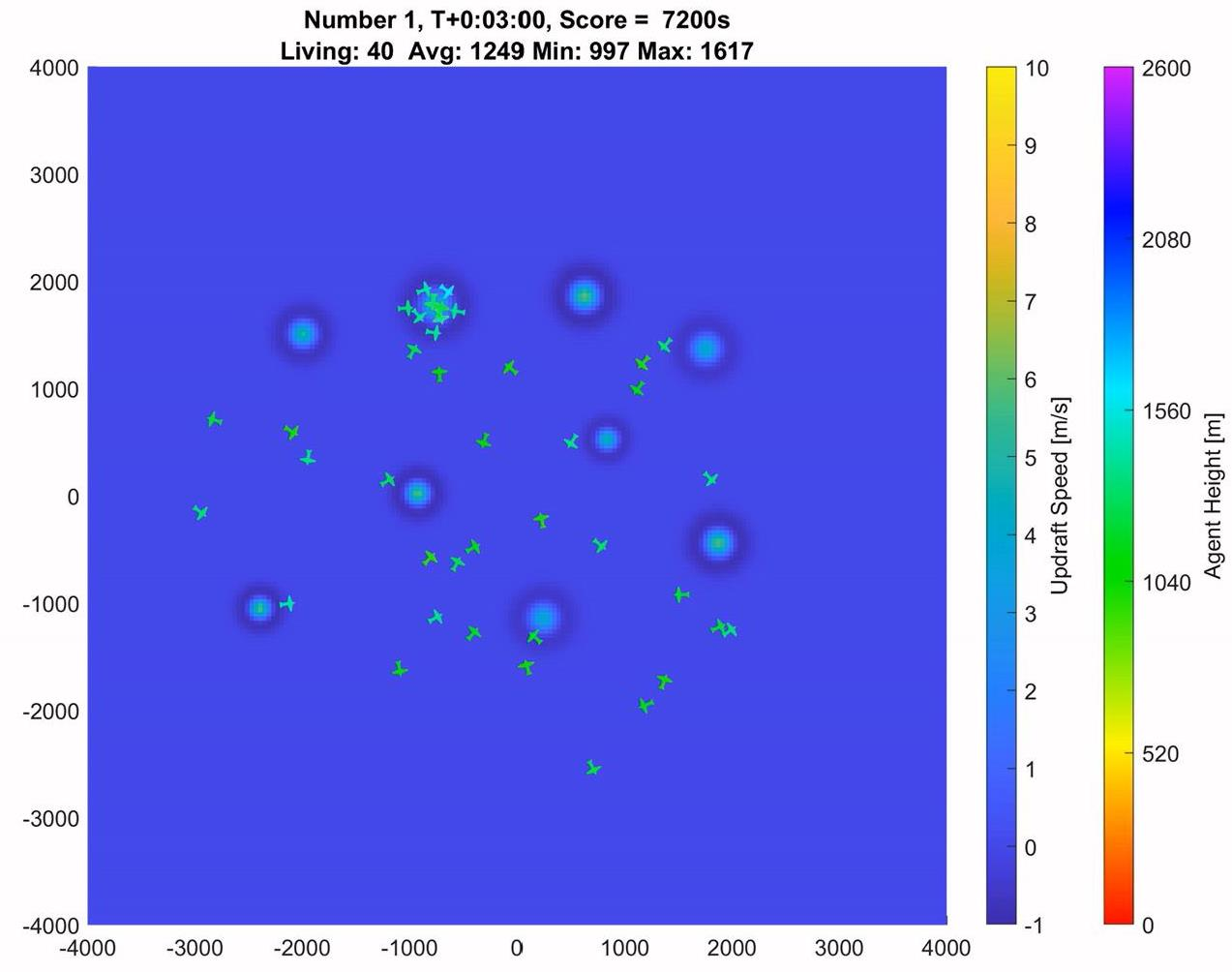
3.1. Behavior Insights from an Individual Simulation Trial
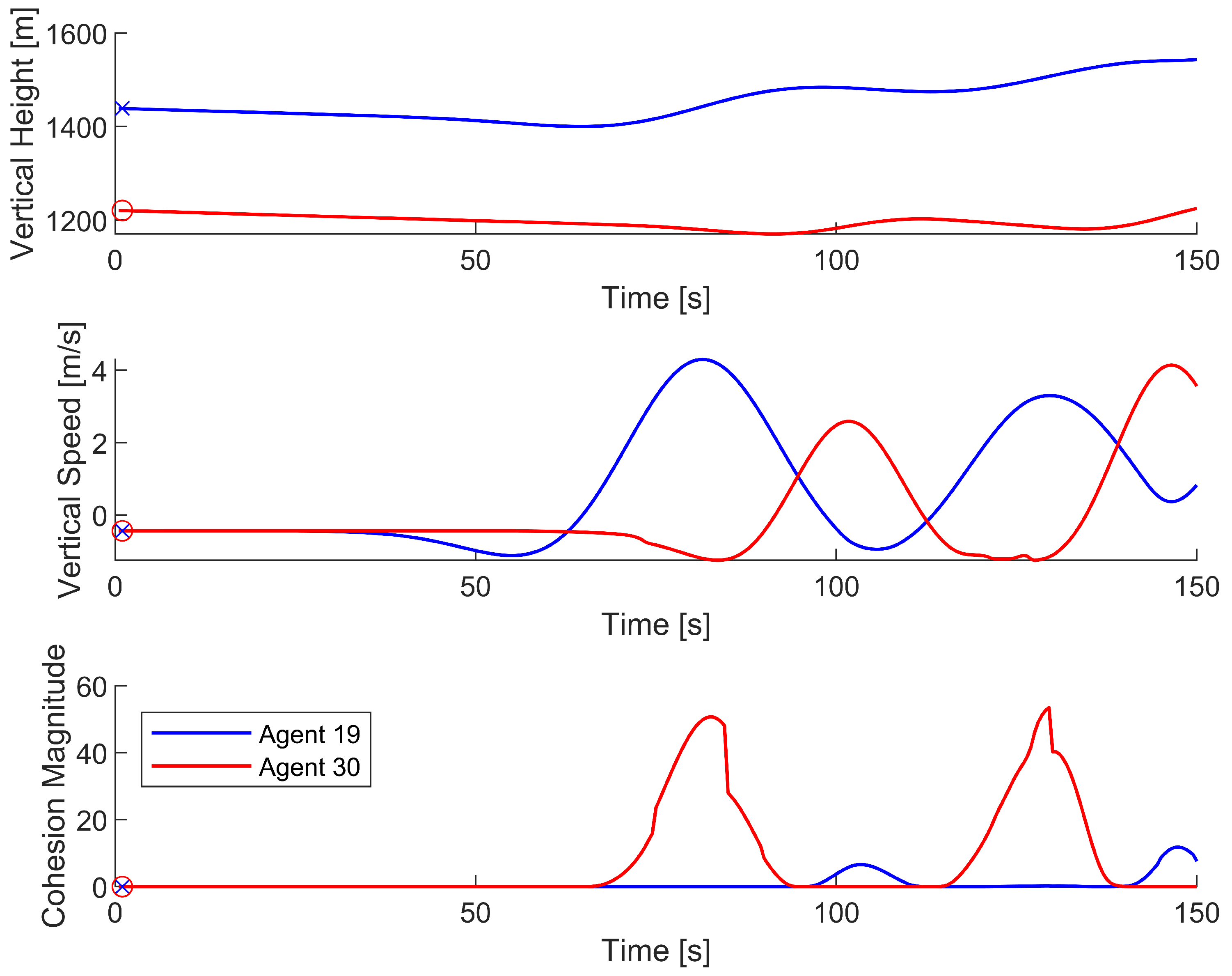
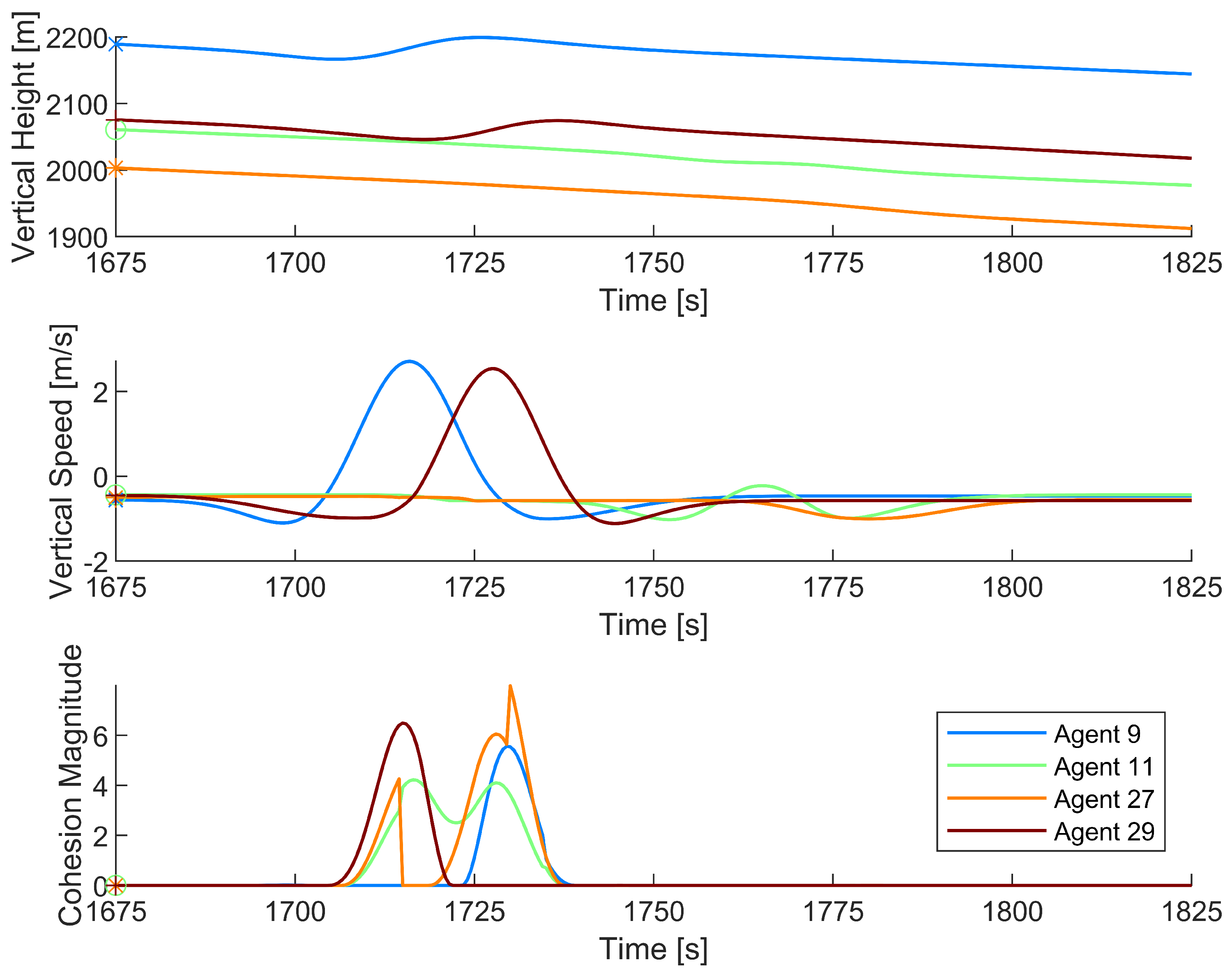
3.2. Discovery of a Thermal Updraft
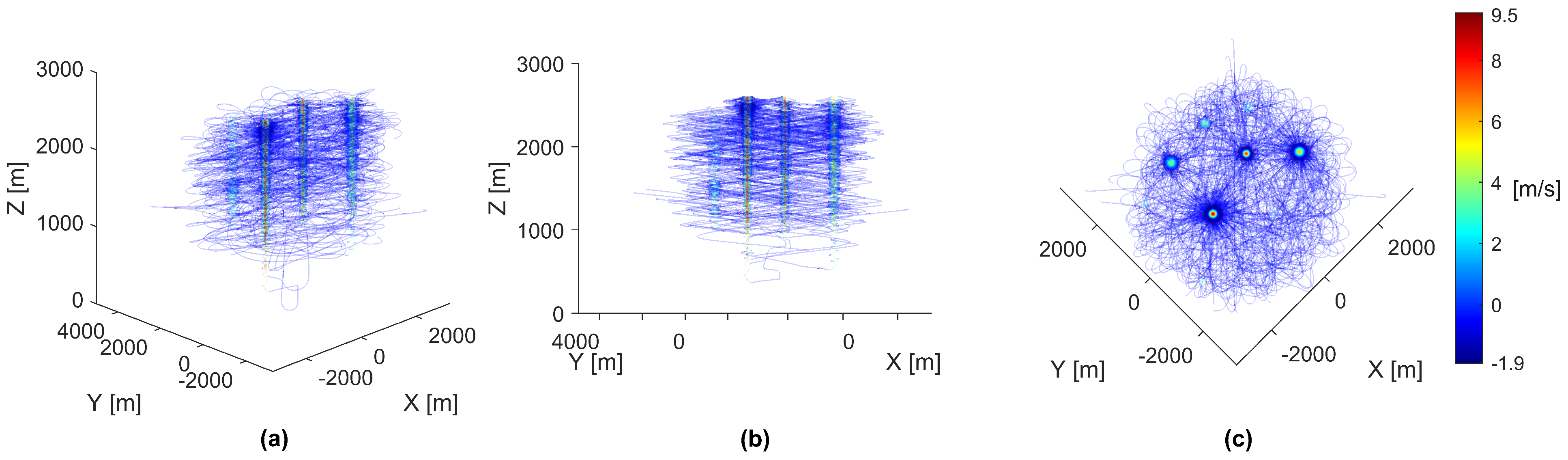
3.3. Exploitation of a Thermal Updraft
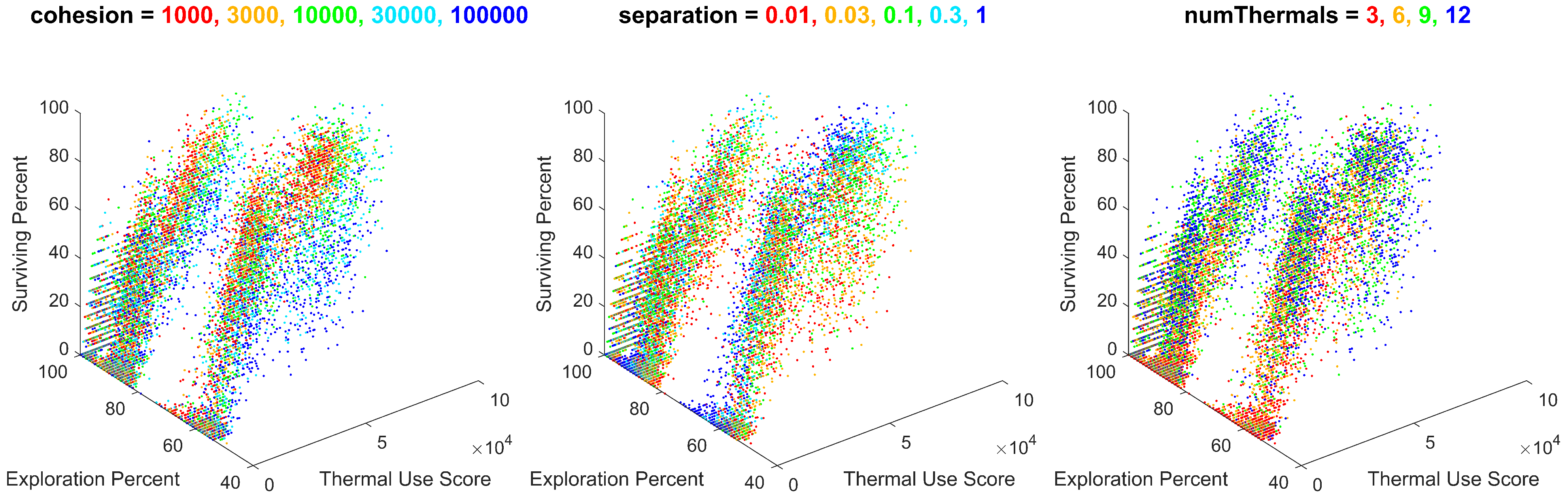
3.4. General Trends from Large Batch Simulation
3.4.1. Sensitivity to Number of Agents
3.4.2. Sensitivity to Number of Thermals
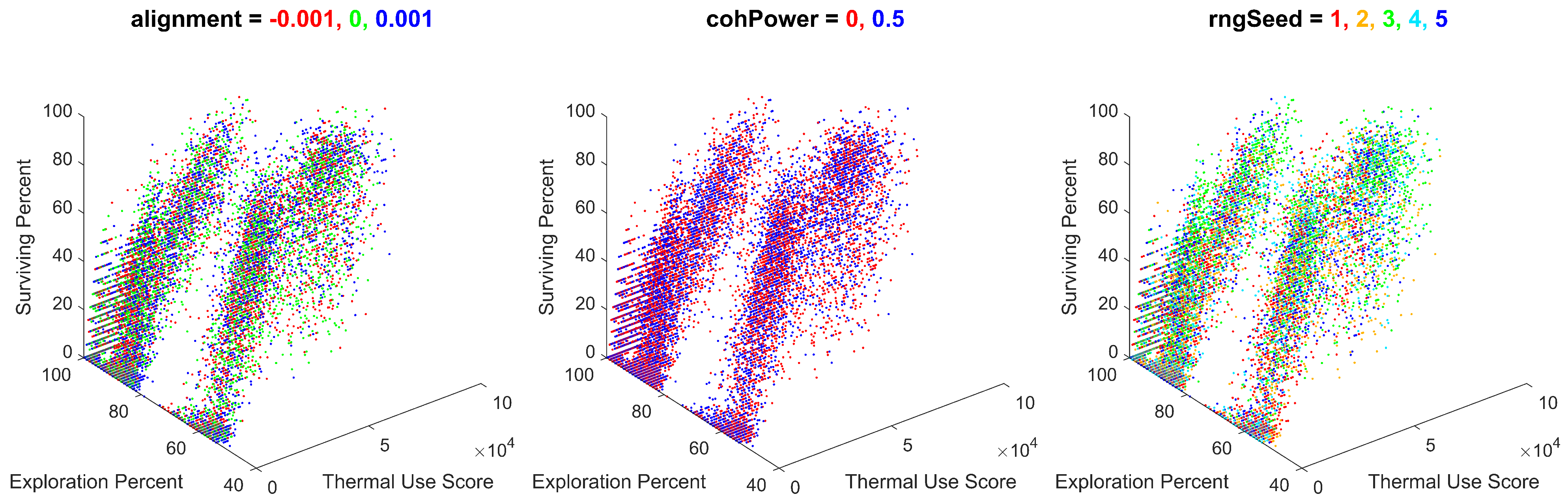
3.4.3. Sensitivity to Migration
3.4.4. Sensitivity to Cohesion Power and Alignment
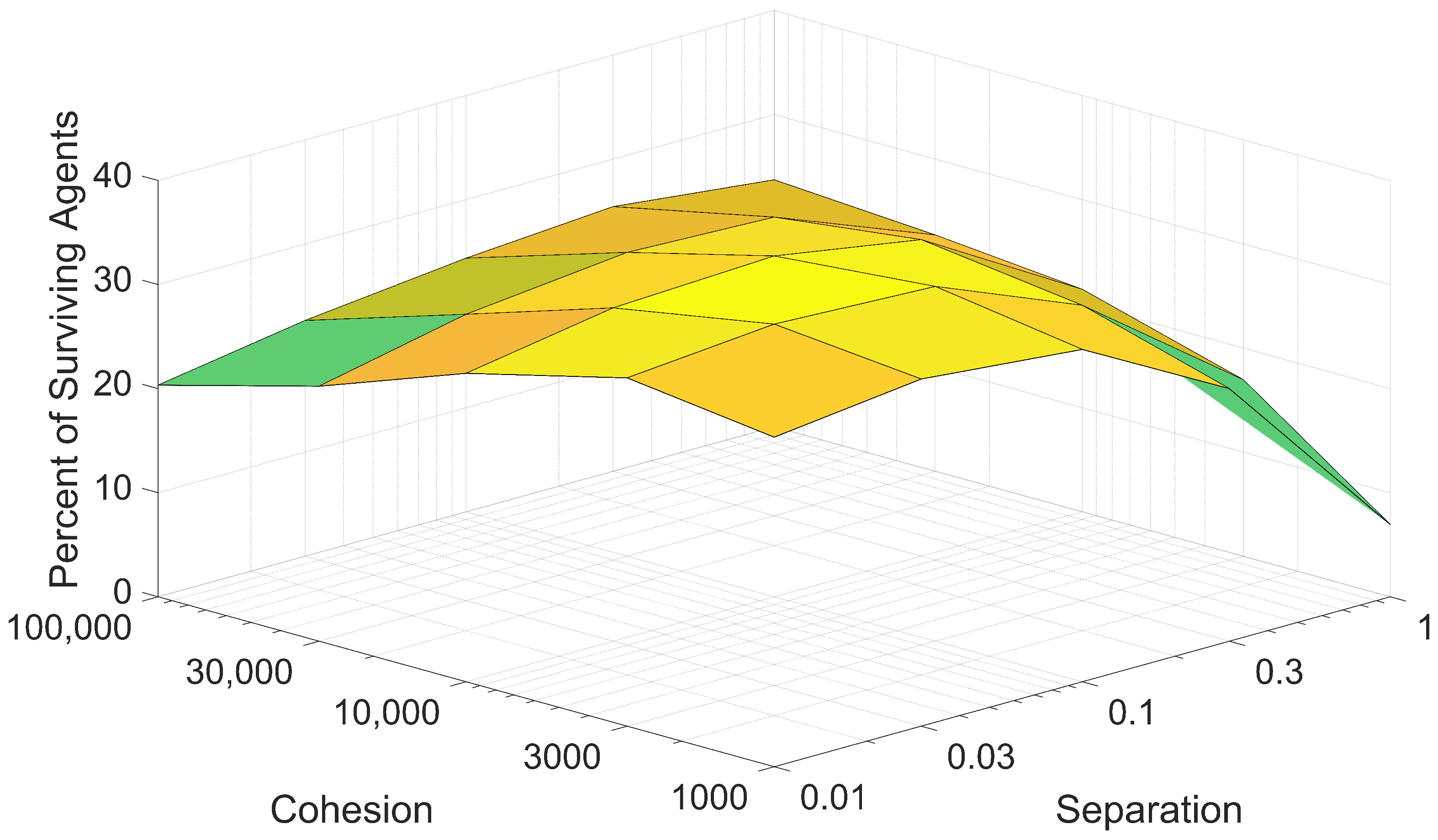
3.4.5. Sensitivity to Cohesion and Separation
3.5. Further Analysis of Metrics
4. Conclusions
Limitations and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Description | Typical Value |
|---|---|---|
| dt | Duration of each step | 0.2–1.0 s |
| totalTime | Duration of simulation | 7200 s |
| numAgents | 20, 40 | |
| numThermals | 3, 6, 9, 12 | |
| neighborFrameSkip | Number of frames between agents checking local neighborhood | 10 |
| rngSeed | 1, 2, 3, 4, 5 | |
| mapSize | Width of simulated area, XY | [−4000, 4000] m |
| agentSpawnPosRange | XY range in which agents are spawned | [−3000, −3000; 3000, 3000] m |
| agentSpawnAltiRange | Altitude range in which agents are spawned | [1100, 1500] m |
| cohesion | Cohesion gain | , , , |
| , | ||
| heightFactorPower | Exponent of cohesion’s height factor | 1 |
| cohesionAscensionIgnore | Minimum relative ascension to ignore agents with less | 0 m/s |
| cohesionAscensionMax | Maximum perceived relative ascension | 10 |
| ascensionFactorPower | Exponent of cohesion’s ascension factor | 2 |
| cohPower | Exponent of cohesion’s distance factor | 0, 0.5 |
| separation | Separation gain | , , , |
| , 1 | ||
| separationHeightWidth | Vertical gap to mask out separation | 200 m |
| sepPower | Exponent of separation’s distance factor | −2 |
| alignment | Alignment gain | , 0, |
| alignmentHeightWidth | Vertical gap to mask out alignment | 200 m |
| aliPower | Exponent of alignment’s distance factor | −2 |
| migration | Migration gain | , , |
| migPower | Exponent of migration’s distance factor | 5 |
| neighborRadius | Radius within which nearby agents can be seen | 1000 m |
| k | Maximum number of perceived nearby neighbors, prioritizing closer neighbors | 10 |
| forwardSpeedMin | Minimum allowed horizontal speed | 8 m/s |
| forwardSpeedMax | Maximum allowed horizontal speed | 13 m/s |
| bankMin | Minimum bank angle | /12 |
| bankMax | Maximum bank angle | /12 |
| fov | Agent field of view | 11/12 |
| funcName | Name of agent control function | Unified |
| funcName | Name of agent local neighborhood function | KNNInFixedRadius |
| [23 inputs] | Controls output appearance | |
| [8 inputs] | Controls agent physical properties | |
| [10 inputs] | Controls thermal physical properties |
References
- Wright, T.; SPACE, A. When is a drone swarm not a swarm? Air Space Mag. 2018. [Google Scholar]
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Trianni, V.; Nolfi, S.; Dorigo, M. Evolution, self-organization and swarm robotics. In Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2008; pp. 163–191. [Google Scholar]
- Zhou, Y.; Rao, B.; Wang, W. UAV swarm intelligence: Recent advances and future trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Colozza, A. Preliminary design of a long-endurance Mars aircraft. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990; p. 2000. [Google Scholar]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Alexis, K.; Siegwart, R. Perpetual flight with a small solar-powered UAV: Flight results, performance analysis and model validation. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–8. [Google Scholar]
- Jain, K.P.; Tang, J.; Sreenath, K.; Mueller, M.W. Staging energy sources to extend flight time of a multirotor UAV. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1132–1139. [Google Scholar]
- Sarkar, S.; Totaro, M.W.; Kumar, A. An intelligent framework for prediction of a uav’s flight time. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 328–332. [Google Scholar]
- Nagy, M.; Leven, S.; Vicsek, T. Thermal soaring flight of birds and UAVs. Bioinspir. Biomim 2010, 5, 3–12. [Google Scholar]
- Langelaan, J. Long distance/duration trajectory optimization for small UAVs. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, South California, CA, USA, 20–23 August 2007; p. 6737. [Google Scholar]
- Federal Aviation Administration; United States Flight Standards Service. Glider Flying Handbook; Aviation Supplies & Academics: Newcastle, WA, USA, 2004. [Google Scholar]
- Depenbusch, N.T.; Bird, J.J.; Langelaan, J.W. The AutoSOAR autonomous soaring aircraft, part 1: Autonomy algorithms. J. Field Robot. 2018, 35, 868–889. [Google Scholar] [CrossRef]
- Depenbusch, N.T.; Bird, J.J.; Langelaan, J.W. The AutoSOAR autonomous soaring aircraft part 2: Hardware implementation and flight results. J. Field Robot. 2018, 35, 435–458. [Google Scholar] [CrossRef]
- Black, R.W.; Borowske, A. The morphology, flight, and flocking behaviour of migrating raptors. Evol. Ecol. Res. 2009, 11, 413–420. [Google Scholar]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Corner, J.J.; Lamont, G.B. Parallel simulation of UAV swarm scenarios. In Proceedings of the 2004 Winter Simulation Conference, Washington, DC, USA, 5–8 December 2004; Volume 1. [Google Scholar]
- Wei, Y.; Blake, M.B.; Madey, G.R. An operation-time simulation framework for UAV swarm configuration and mission planning. Procedia Comput. Sci. 2013, 18, 1949–1958. [Google Scholar] [CrossRef]
- Dimakos, A.; Woodhall, D.; Asif, S. A study on centralised and decentralised swarm robotics architecture for part delivery system. Acad. J. Eng. Stud. 2021, 2, 1–9. [Google Scholar]
- Smith, T.; Gutierrez, E.; Bredu, J.A.; Gu, Y.; Gross, J. Cooperative and Coordinated Localization of Swarm Robots using Adaptive Boids Rules. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 2927–2940. [Google Scholar]
- Sherman, T.M.; Cady, T.; Caudle, M.; Elemy, T.S. Application of a Modified Boids Algorithm For Navigation and Mapping with a Swarm of Small UAVs. In Proceedings of the AIAA SciTech Forum and Exposition, San Diego, CA, USA, 7–19 January 2019; p. 853. [Google Scholar]
- Leu, G.; Tang, J. Survivable networks via UAV swarms guided by decentralized real-time evolutionary computation. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019; pp. 1945–1952. [Google Scholar]
- Edwards, D.J. Autonomous Locator of Thermals (ALOFT) Autonomous Soaring Algorithm; Technical Report; NAVAL Research Lab.: Washington, DC, USA, 2015. [Google Scholar]
- Ellias, J. Performance Testing of RNR’s SBXC Using GPS. 2016. Available online: http://www.xcsoaring.com/articles/john_ellias_1/sbxc_performance_test.pdf (accessed on 1 June 2022).
- Kerlinger, P.; Moore, F.R. Atmospheric structure and avian migration. In Current Ornithology; Springer: Boston, MA, USA, 1989; pp. 109–142. [Google Scholar]
- Raju, S.G.; Poquillon, E.; Rachelson, E. A Survey on Thermal Updraft Models; Technical Report; ISAE-SUPAERO: Toulouse, France, 2020. [Google Scholar]
- Childress, C.E. An Empirical Model of Thermal Updrafts Using Data Obtained from a Manned Glider. Master’s Thesis, University of Tennessee, Tennessee, TN, USA, 2010. [Google Scholar]
- Pennycuick, C.J. Field observations of thermals and thermal streets, and the theory of cross-country soaring flight. J. Avian Biol. 1998, 29, 33–43. [Google Scholar] [CrossRef]


















| Parameter | Description | Tested Values | Number of Values |
|---|---|---|---|
| numAgents | Number of agents at simulation start | 20, 40 | 2 |
| numThermals | Number of thermal updrafts | 3, 6, 9, 12 | 4 |
| rngSeed | RNG seeds for repeatability | 1, 2, 3, 4, 5 | 5 |
| cohesion | Cohesion gain | , , , , | 5 |
| separation | Separation gain | , , , , 1 | 5 |
| alignment | Alignment gain | , 0, | 3 |
| migration | Migration gain | , , | 3 |
| cohPower | Exponent of distance for cohesion | 0, 0.5 | 2 |
| Total Combinations | 18,000 |
| Input/Output | Recorded Variable Name | Recorded Value |
|---|---|---|
| Input | Cohesion | 1000 |
| Input | Separation | 0.3 |
| Input | Alignment | 0.001 |
| Input | Cohesion Power | 0 |
| Input | Migration | |
| Input | Number of Thermals | 9 |
| Input | Number of Agents | 40 |
| Input | RNG Seed | 2 |
| Output | Number of Surviving Agents | 40 |
| Output | Height Score | |
| Output | Thermal Use Score | 56708 |
| Output | Exploration Percentage | 67 |
| Output | Flight Time | 288,000 |
| Output | Collision Deaths | 0 |
| Output | Ground Deaths | 0 |
| Output | Final Height Maximum | 2271.22 |
| Output | Final Height Minimum | 752.903 |
| Output | Final Height Average | 2001.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pooley, A.; Gao, M.; Sharma, A.; Barnaby, S.; Gu, Y.; Gross, J. Analysis of UAV Thermal Soaring via Hawk-Inspired Swarm Interaction. Biomimetics 2023, 8, 124. https://doi.org/10.3390/biomimetics8010124
Pooley A, Gao M, Sharma A, Barnaby S, Gu Y, Gross J. Analysis of UAV Thermal Soaring via Hawk-Inspired Swarm Interaction. Biomimetics. 2023; 8(1):124. https://doi.org/10.3390/biomimetics8010124
Chicago/Turabian StylePooley, Adam, Max Gao, Arushi Sharma, Sachi Barnaby, Yu Gu, and Jason Gross. 2023. "Analysis of UAV Thermal Soaring via Hawk-Inspired Swarm Interaction" Biomimetics 8, no. 1: 124. https://doi.org/10.3390/biomimetics8010124
APA StylePooley, A., Gao, M., Sharma, A., Barnaby, S., Gu, Y., & Gross, J. (2023). Analysis of UAV Thermal Soaring via Hawk-Inspired Swarm Interaction. Biomimetics, 8(1), 124. https://doi.org/10.3390/biomimetics8010124