
Anisotropic Wettability of Bioinspired Surface Characterized by Friction Force

 , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Preparation
2.2. Surface Wettability
2.3. Surface Morphology
3. Results and Discussion
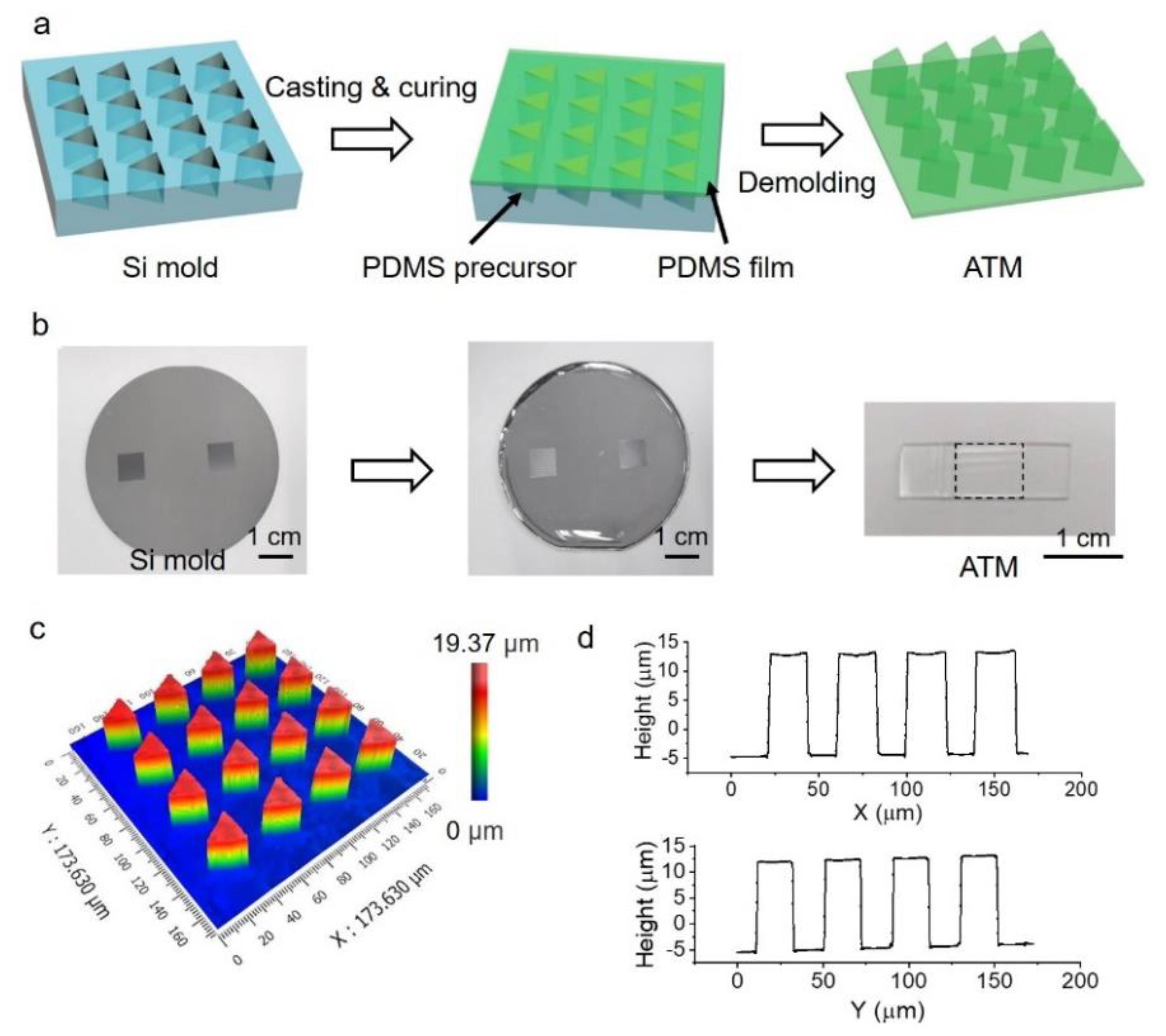
3.1. Fabrication of ATM
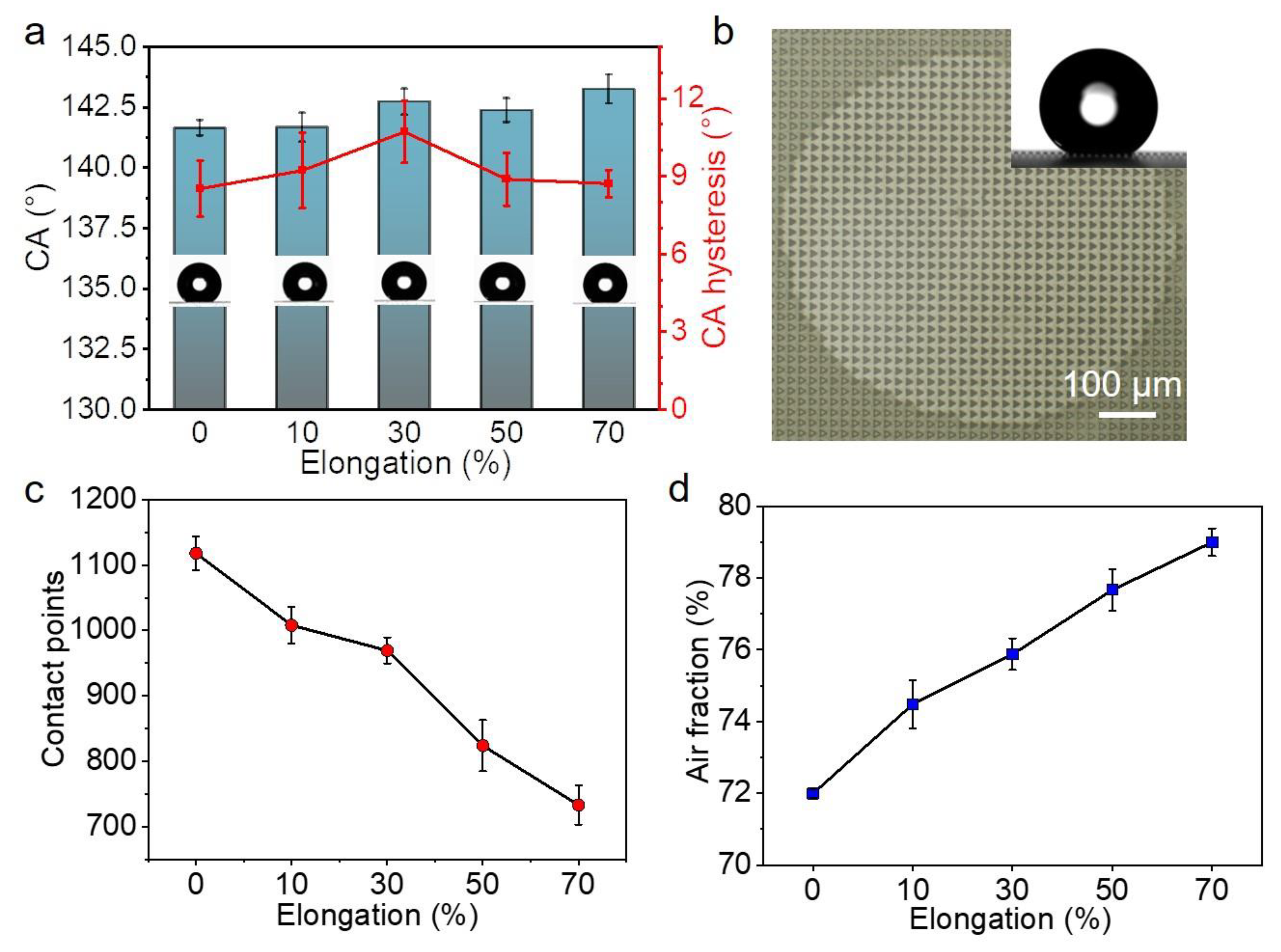
3.2. Characterization of Wetting Property of ATMs
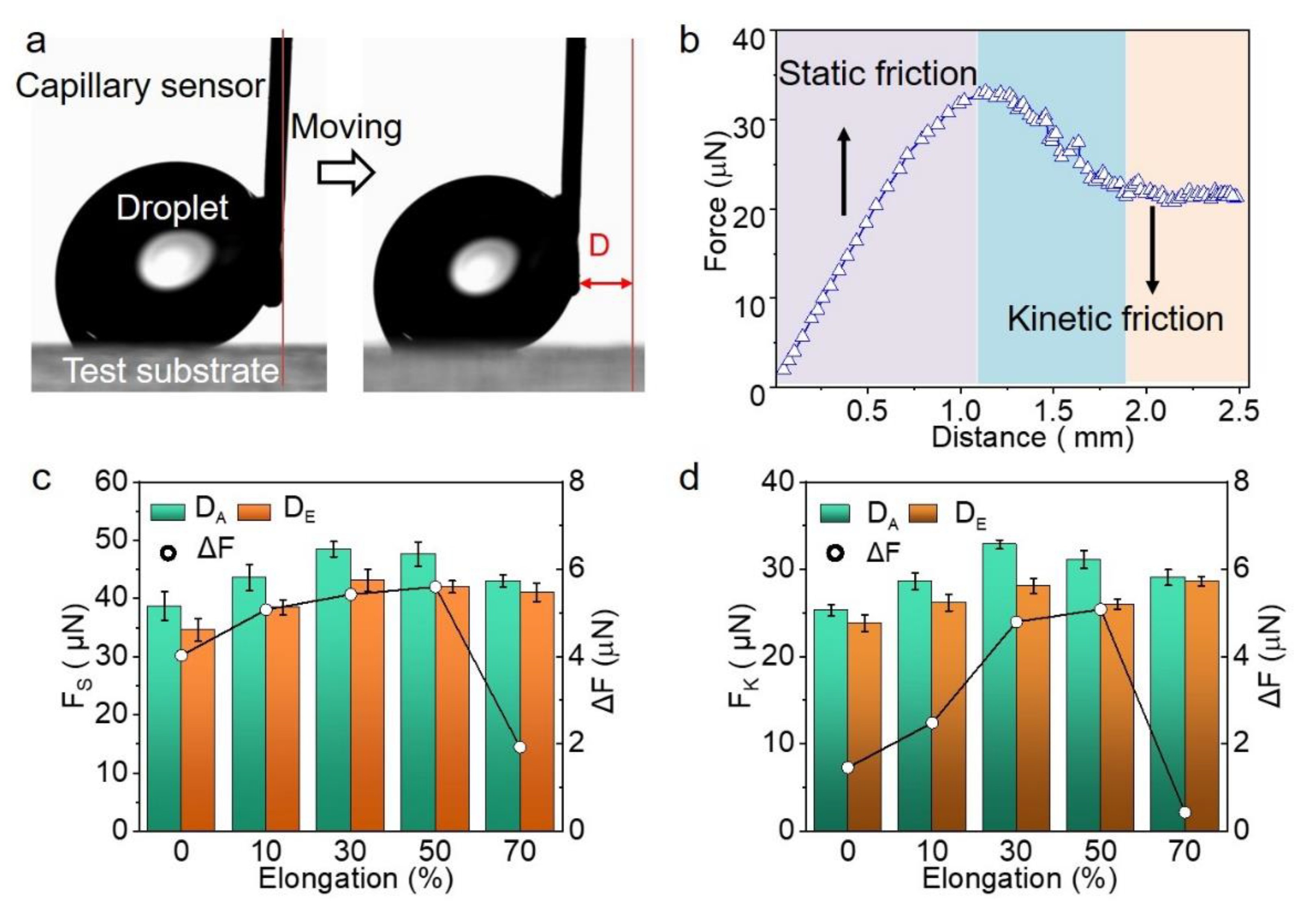
3.3. Friction at Solid-Liquid Interface
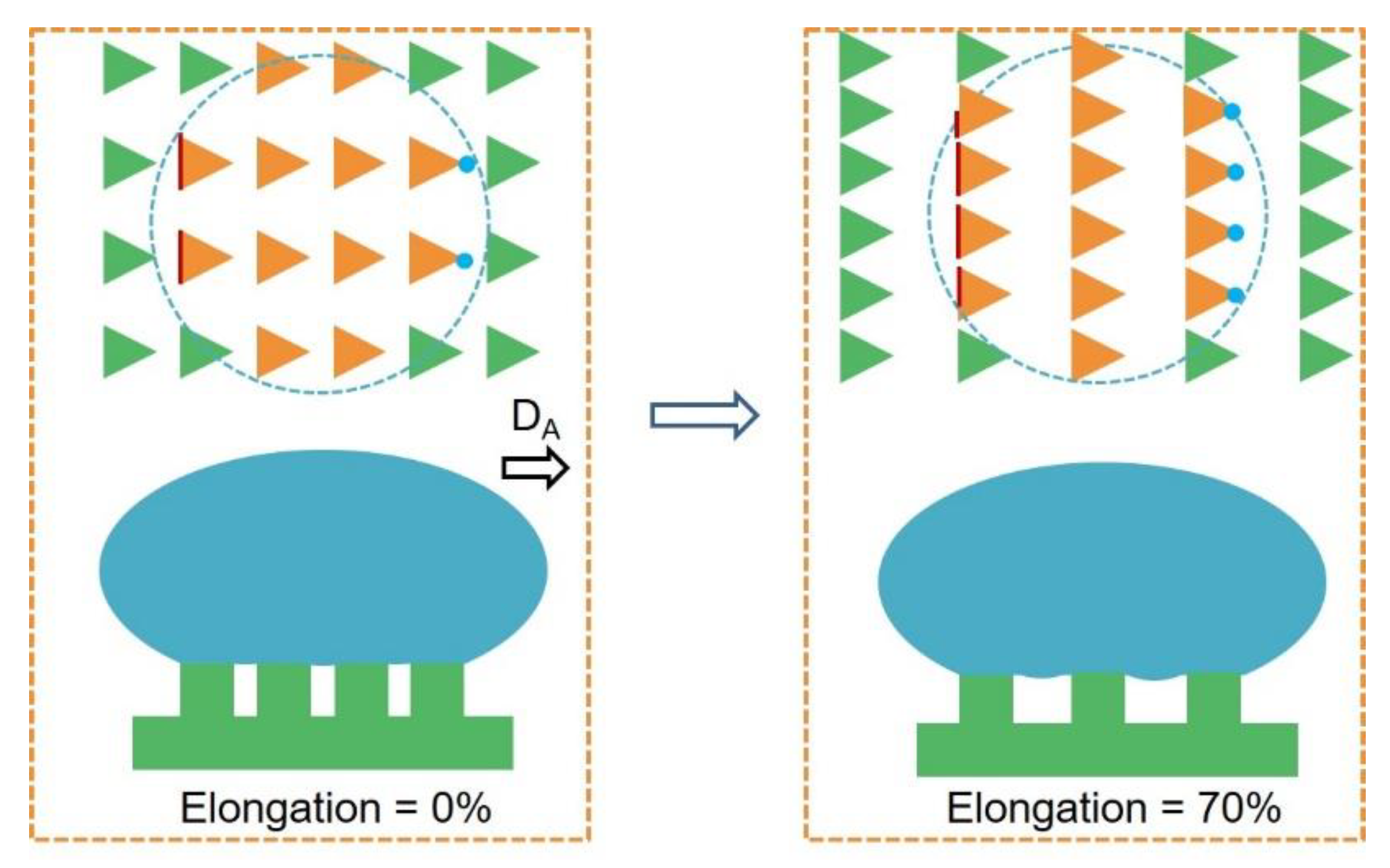
3.4. Mechanism for Anisotropic Friction
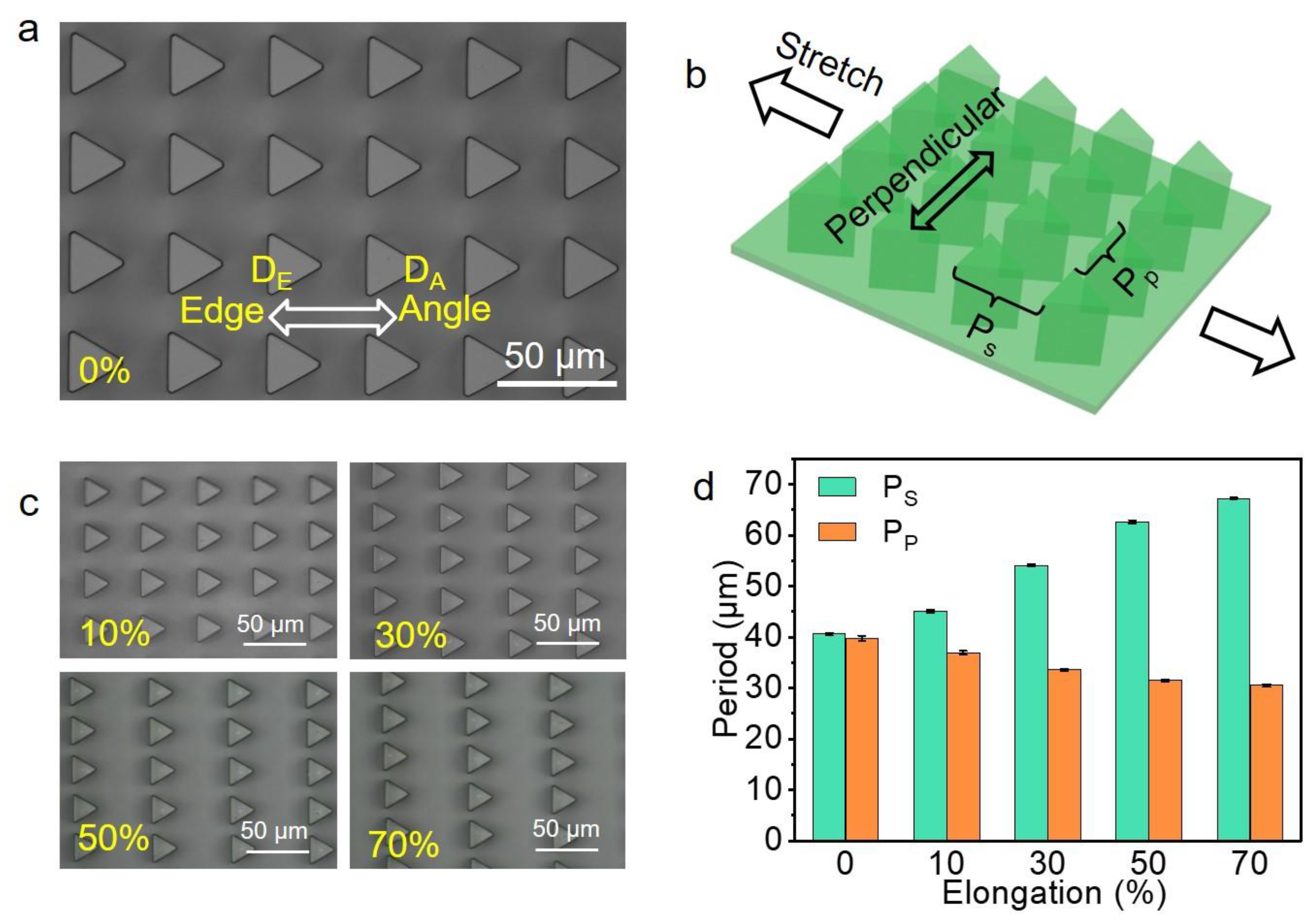
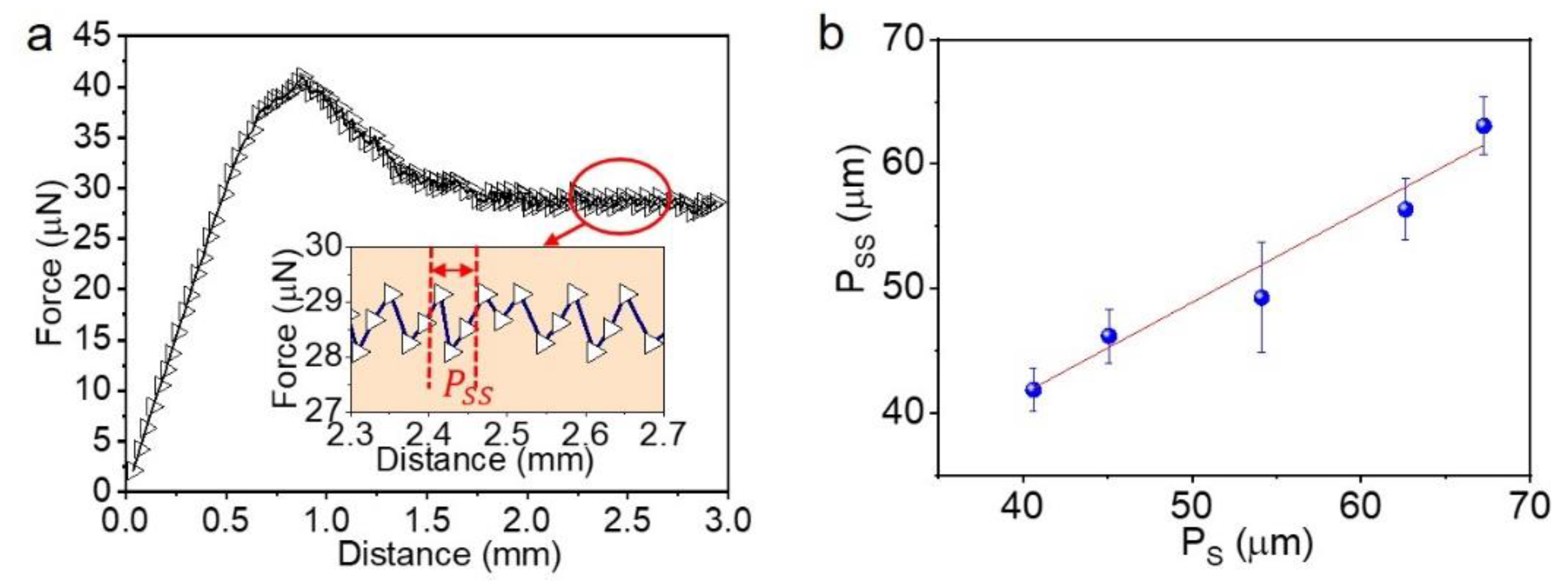
3.5. Revealing of Surface Periodicity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, L.; Li, S.; Li, Y.; Li, H.; Zhang, L.; Zhai, J.; Song, Y.; Liu, B.; Jiang, L.; Zhu, D. Super-hydrophobic surfaces: From natural to artificial. Adv. Mater. 2002, 14, 1857–1860. [Google Scholar] [CrossRef]
- Yong, J.; Chen, F.; Yang, Q.; Huo, J.; Hou, X. Superoleophobic surfaces. Chem. Soc. Rev. 2017, 46, 4168–4217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, B.; Tian, Y.; Jiang, L. Bioinspired interfaces with superwettability: From materials to chemistry. J. Am. Chem. Soc. 2016, 138, 1727–1748. [Google Scholar] [CrossRef]
- Kong, T.; Luo, G.; Zhao, Y.; Liu, Z. Bioinspired superwettability micro/nano-architectures: Fabrications and applications. Adv. Funct. Mater. 2019, 29, 1808012. [Google Scholar] [CrossRef]
- Liu, M.; Wang, S.; Jiang, L. Nature-inspired superwettability systems. Nat. Rev. Mater. 2017, 2, 17036. [Google Scholar] [CrossRef]
- Zheng, Y.; Gao, X.; Jiang, L. Directional adhesion of superhydrophobic butterfly wings. Soft Matter 2006, 3, 178–182. [Google Scholar] [CrossRef] [PubMed]
- Bush, J.W.M.; Hu, D.L.; Prakash, M. The integument of water-walking arthropods: Form and function. Adv. Insect. Physiol. 2007, 34, 117–192. [Google Scholar]
- Oelschlägel, B.; Gorb, S.; Wanke, S.; Neinhuis, C. Structure and biomechanics of trapping flower trichomes and their role in the pollination biology of Aristolochia plants (Aristolochiaceae). New. Phytol. 2009, 184, 988–1002. [Google Scholar] [CrossRef]
- Wen, L.P.; Tian, Y.; Jiang, L. Bioinspired super-wettability from fundamental research to practical applications. Angew. Chem. Int. Ed. 2015, 54, 3387–3399. [Google Scholar] [CrossRef]
- Qian, Z.; Zhang, S.; Xue, L. Numerical study of mitigating cloud cavitation shedding using biomimetic protuberant stripes. J. Fluids Eng. 2022, 144, 091201. [Google Scholar] [CrossRef]
- Sun, Y.; Guo, Z. Recent advances of bioinspired functional materials with specific wettability: From nature and beyond nature. Nanoscale Horiz. 2018, 4, 52–76. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Guo, Z.; Liu, W. Adhesion behaviors on superhydrophobic surfaces. Chem. Commun. 2013, 50, 3900–3913. [Google Scholar] [CrossRef] [PubMed]
- Mertens, S.F.L.; Hemmi, A.; Muff, S.; Gröning, O.; De Feyter, S.; Osterwalder, J.; Greber, T. Switching stiction and adhesion of a liquid on a solid. Nature 2016, 534, 676–679. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ge, P.; Wang, S.; Zhang, J.; Yang, B. Micro-/nanostructures meet anisotropic wetting: From preparation methods to applica-tions. Mater. Horiz. 2020, 7, 2566–2595. [Google Scholar] [CrossRef]
- Huang, S.; Li, J.; Liu, L.; Zhou, L.; Tian, X. Lossless fast drop self-transport on anisotropic omniphobic surfaces: Origin and elimination of microscopic liquid residue. Adv. Mater. 2019, 31, e1901417. [Google Scholar] [CrossRef]
- Li, Q.; Li, L.; Shi, K.; Yang, B.; Wang, X.; Shi, Z.; Tan, D.; Meng, F.; Liu, Q.; Hu, S.; et al. Reversible structure engineering of bioinspired anisotropic surface for droplet recognition and transportation. Adv. Sci. 2020, 7. [Google Scholar] [CrossRef]
- Shi, K.; Li, Q.; Zhang, J.; Li, L.; Yang, B.; Hu, S.; Lei, Y.; Liu, Z.; Liu, S.; Xue, L. Quantitative characterization of surface wettability by friction force. Appl. Surf. Sci. 2020, 536, 147788. [Google Scholar] [CrossRef]
- Arzt, E.; Quan, H.; McMeeking, R.M.; Hensel, R. Functional surface microstructures inspired by nature—From adhesion and wetting principles to sustainable new devices. Prog. Mater. Sci. 2021, 120, 100823. [Google Scholar] [CrossRef]
- Chen, F.; Xiang, W.; Yin, S.; Huang, S. Magnetically responsive superhydrophobic surface with switchable adhesivity based on electrostatic air spray deposition. ACS Appl. Mater. Interfaces 2021, 13, 20885–20896. [Google Scholar] [CrossRef]
- Liu, K.; Vuckovac, M.; Latikka, M.; Huhtamäki, T.; Ras, R.H.A. Improving surface-wetting characterization. Science 2019, 363, 1147–1148. [Google Scholar] [CrossRef] [Green Version]
- Boutopoulos, C.; Papageorgiou, D.P.; Zergioti, I.; Papathanasiou, A.G. Sticking of droplets on slippery superhydrophobic surfaces by laser induced forward transfer. Appl. Phys. Lett. 2013, 103, 024104. [Google Scholar] [CrossRef]
- Kumar, M.; Bhardwaj, R.; Sahu, K. Motion of a droplet on an anisotropic microgrooved surface. Langmuir 2019, 35, 2957–2965. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Du, K.; Wang, K. Surface wettability of TiO2 nanotube arrays prepared by electrochemical anodization. Appl. Surf. Sci. 2016, 388, 313–320. [Google Scholar] [CrossRef]
- Wenzel, R.N. Resistance of solid surfaces to wetting by water. Ind. Eng. Chem. 1936, 28, 988–994. [Google Scholar] [CrossRef]
- Cassie, A.B.D.; Baxter, S. Wettability of porous surfaces. Trans. Faraday Soc. 1944, 40, 546–551. [Google Scholar] [CrossRef]
- Xu, P.; Zhang, Y.; Li, L.; Lin, Z.; Zhu, B.; Chen, W.; Li, G.; Liu, H.; Xiao, K.; Xiong, Y.; et al. Adhesion behaviors of water droplets on bioinspired superhydrophobic surfaces. Bioinspir. Biomim. 2022, 17, 041003. [Google Scholar] [CrossRef]
- Nine, M.J.; Tung, T.T.; Alotaibi, F.; Tran, D.N.H.; Losic, D. Facile adhesion-tuning of superhydrophobic surfaces between “lotus” and “petal” effect and their influence on icing and deicing properties. ACS Appl. Mater. Interfaces 2017, 9, 8393–8402. [Google Scholar] [CrossRef]
- Feng, L.; Zhang, Y.; Xi, J.; Zhu, Y.; Wang, N.; Xia, A.F.; Jiang, L. Petal effect: A superhydrophobic state with high adhesive force. Langmuir 2008, 24, 4114–4119. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, K.; Xu, P.; Li, Q.; Xue, L. The dynamic regulation of friction force of a water droplet on goose bumps-inspired surfaces. Surf. Tech. 2021, 50, 66–73. [Google Scholar]
- Zhang, J.; Shi, K.; Xu, P.; Li, Q.; Xue, L. Characterization of classical biological surfaces with special wettabilities by liquid-solid friction force. Surf. Tech. 2021, 50, 187–193. [Google Scholar] [CrossRef]
- Iturri, J.; Xue, L.; Kappl, M.; García-Fernández, L.; Barnes, W.J.P.; Butt, H.-J.; del Campo, A. Torrent frog-inspired adhesives: Attachment to flooded surfaces. Adv. Funct. Mater. 2015, 25, 1499–1505. [Google Scholar] [CrossRef]
- Marmur, A.; Della, V.C.; Siboni, S.; Amirfazli, A.; Drelich, J.W. Contact angles and wettability: Towards common and accurate terminology. Surf. Innov. 2017, 5, 3–8. [Google Scholar] [CrossRef] [Green Version]
- Miwa, M.; Nakajima, A.; Fujishima, A.; Hashimoto, K.; Watanabe, T. Effects of the surface roughness on sliding angles of water droplets on superhydrophobic surfaces. Langmuir 2000, 16, 5754–5760. [Google Scholar] [CrossRef]
- Marmur, A. Wetting on hydrophobic rough surfaces: To be heterogeneous or not to be? Langmuir 2003, 19, 8343–8348. [Google Scholar] [CrossRef]
- Wang, S.; Liu, K.; Yao, X.; Jiang, L. Bioinspired surfaces with superwettability: New insight on theory, design, and applications. Chem. Rev. 2015, 115, 8230–8293. [Google Scholar] [CrossRef]
- Gao, N.; Geyer, F.; Pilat, D.W.; Wooh, S.; Vollmer, D.; Butt, H.-J.; Berger, R. How drops start sliding over solid surfaces. Nat. Phys. 2017, 14, 191–196. [Google Scholar] [CrossRef]
- Schellenberger, F.; Encinas, N.; Vollmer, D.; Butt, H.-J. How water advances on superhydrophobic surfaces. Phys. Rev. Lett. 2016, 116, 096101. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Li, L.; Xu, P.; Lei, Y.; Song, Q.; Liu, J.; Xiong, Y.; Yang, S.; Zhang, Y.; Xue, L. Anisotropic Wettability of Bioinspired Surface Characterized by Friction Force. Biomimetics 2022, 7, 108. https://doi.org/10.3390/biomimetics7030108
Zhang J, Li L, Xu P, Lei Y, Song Q, Liu J, Xiong Y, Yang S, Zhang Y, Xue L. Anisotropic Wettability of Bioinspired Surface Characterized by Friction Force. Biomimetics. 2022; 7(3):108. https://doi.org/10.3390/biomimetics7030108
Chicago/Turabian StyleZhang, Jinhong, Lijun Li, Peng Xu, Yifeng Lei, Qianlin Song, Junwei Liu, Yunhe Xiong, Sixing Yang, Yurong Zhang, and Longjian Xue. 2022. "Anisotropic Wettability of Bioinspired Surface Characterized by Friction Force" Biomimetics 7, no. 3: 108. https://doi.org/10.3390/biomimetics7030108
APA StyleZhang, J., Li, L., Xu, P., Lei, Y., Song, Q., Liu, J., Xiong, Y., Yang, S., Zhang, Y., & Xue, L. (2022). Anisotropic Wettability of Bioinspired Surface Characterized by Friction Force. Biomimetics, 7(3), 108. https://doi.org/10.3390/biomimetics7030108