1. Introduction
Inspired by biological systems’ exceptional functionality and adaptability, biomimetic robotics and sensing technologies have become revolutionary tools in the healthcare and rehabilitation fields [
1]. These cutting-edge technologies aim to mimic the complex workings of nature, utilizing the complementary fields of biology and engineering to improve patient care and rehabilitation results. Biomimetic sensors and robots provide novel answers to long-standing problems in medical and rehabilitation procedures by mimicking the shape and functionality of biological species, from the agility of animal locomotion to the dexterity of the human hand [
2,
3]. In addition to providing more individualized and effective care routes, the smooth integration of these technologies into healthcare settings can transform diagnosis, treatment, and monitoring. From bio-inspired materials to sensors and assistive medical systems, the healthcare sector is actively harnessing biomimetics.
The capacity to mimic natural movements and responses, which are frequently more flexible and effective than those of strictly constructed systems, drives biomimetic robotics and sensing [
4,
5]. These features, such as rehabilitation robots, exoskeletons, and prosthetics, are essential for applications that restore or enhance human function. These systems enable real-time, adaptive interactions between patients and assistive devices, which are made possible by sensing technologies inspired by biological processes, such as tactile sensors that simulate the skin’s sensitivity or visual systems that resemble the human eye [
6,
7]. More dynamic and successful rehabilitation techniques are made possible by these bio-inspired sensors’ ability to track physiological parameters, identify minute changes in a patient’s state, and modify treatment approaches accordingly [
8,
9].
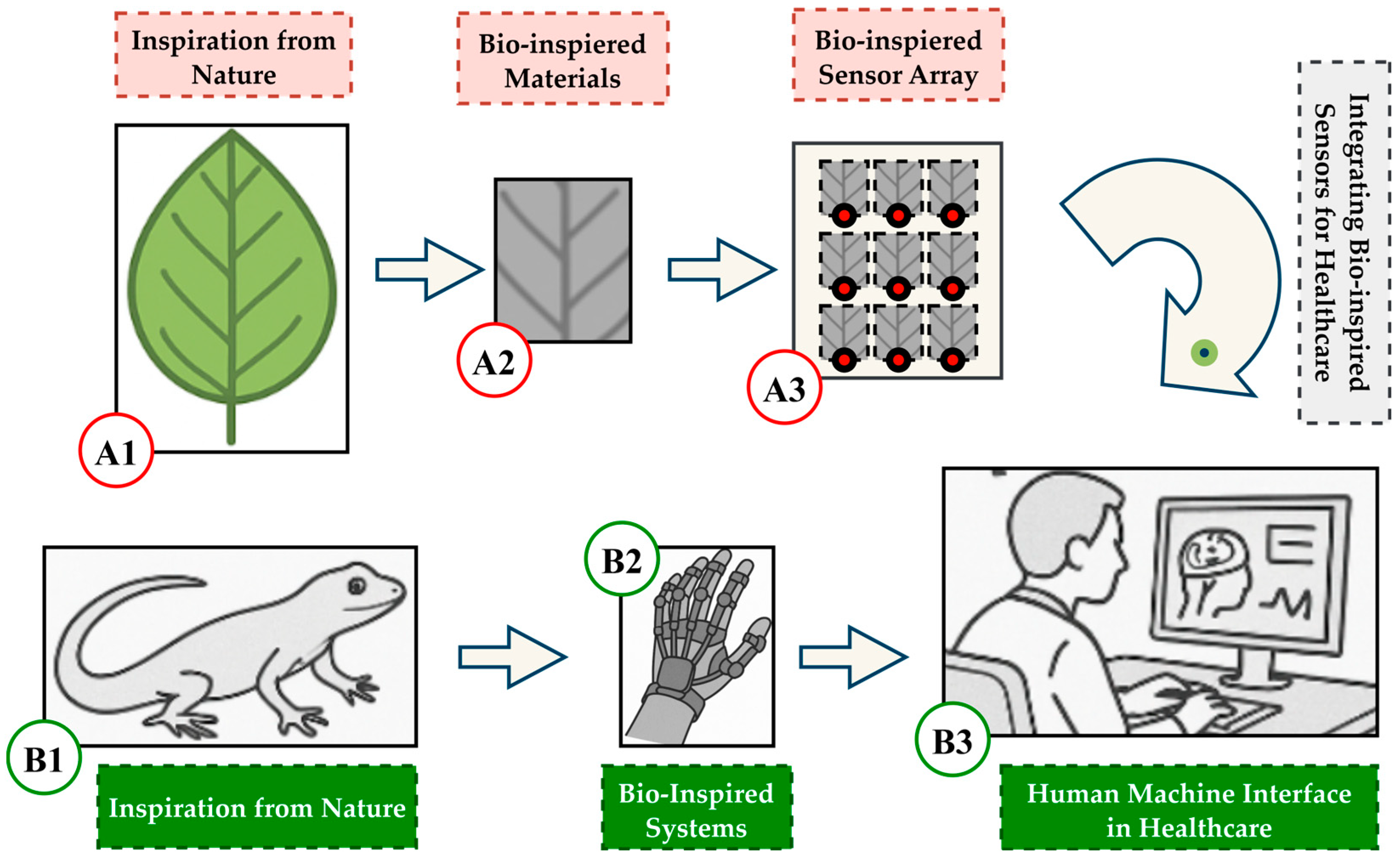
Figure 1 presents two conceptual pathways showing how bio-inspired ideas lead to technological innovations. Path A traces inspiration from natural structures (like a leaf) to bio-inspired materials and sensor arrays. The Path B follows animal-inspired systems (like a lizard) to robotic devices and healthcare interfaces, such as exoskeletons. As shown in the illustration, both contributed to the role of nature-inspired design in advancing sensing technologies and human–machine interfaces in the healthcare sector.
Despite notable advancements in the multidisciplinary field of biomimetic robotics and sensing technologies, particularly within healthcare and rehabilitation contexts, a comprehensive understanding of the field’s current state remains insufficient. Systematic reviews are crucial in synthesizing existing research, identifying knowledge gaps, and establishing coherent frameworks to guide future innovations. This systematic review offers a detailed examination of biomimetic robotics and sensing technologies applied in healthcare and rehabilitation, focusing on their design principles, functional mechanisms, clinical efficacy, and potential for integration across diverse medical settings.
By evaluating the current landscape and highlighting promising directions, this review underscores both the technological progress achieved and the essential role of interdisciplinary collaboration in shaping the future of patient-centered care. The exploration of biomimetic robotics and sensing technologies is fundamentally driven by a commitment to enhancing quality of life, restoring lost functions, and expanding the capabilities of both patients and healthcare providers.
What distinguishes this publication from existing reviews is its systematic and up-to-date synthesis of 89 studies published between 2020 and early 2025. The review employs a PRISMA-based methodology to identify relevant studies and categorizes the findings into interdisciplinary technological clusters. In addition to documenting recent technological advancements, the review identifies critical areas for future inquiry, such as the development of compliant actuators and the challenges of clinical translation, offering valuable insights to inform subsequent research and innovation.
2. Source Screening Methodology
This section outlines the review design methodology. The authors conducted the literature screening process by the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines [
10].
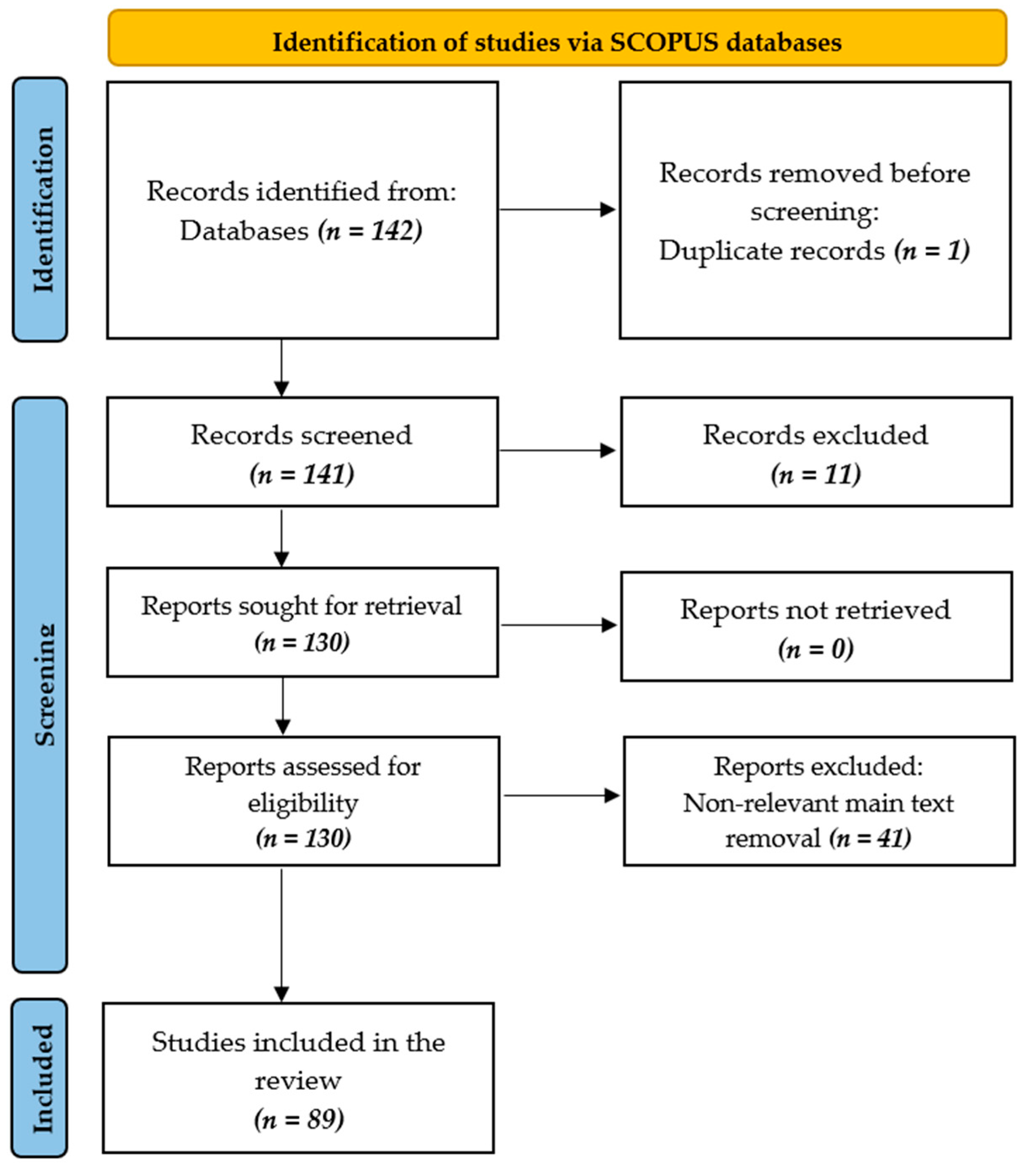
Figure 2 displays the PRISMA flow diagram that depicts the review procedure.
The PRISMA checklist was also used to ensure transparent and standardized reporting. The Scopus database was selected due to its extensive coverage of peer-reviewed engineering and medical publications. Under the PRISMA guidelines, the initial literature search was conducted using the Scopus database, targeting publications from 2020 to 2025 with keywords and keyword combinations such as “bio-inspired,” “biomimetic,” “biomimicry,” “rehabilitation,” “diagnosis,” “surgical technique,” “robotics,” and “sensing.” The search was restricted to English-language documents, including articles, conference papers, and book chapters. This yielded 142 records, from which studies unrelated to direct medical, diagnostic, and rehabilitative applications and duplicated records were excluded, resulting in 130 sources for further analysis. The 41 more sources were omitted from a content analysis because they were irrelevant (purely mechanical or structural biomimetic systems not directly used in rehabilitation, diagnosis, surgery, or sensing). Eighty-nine sources were selected for the final review, and this review study is based on the information derived from those sources.
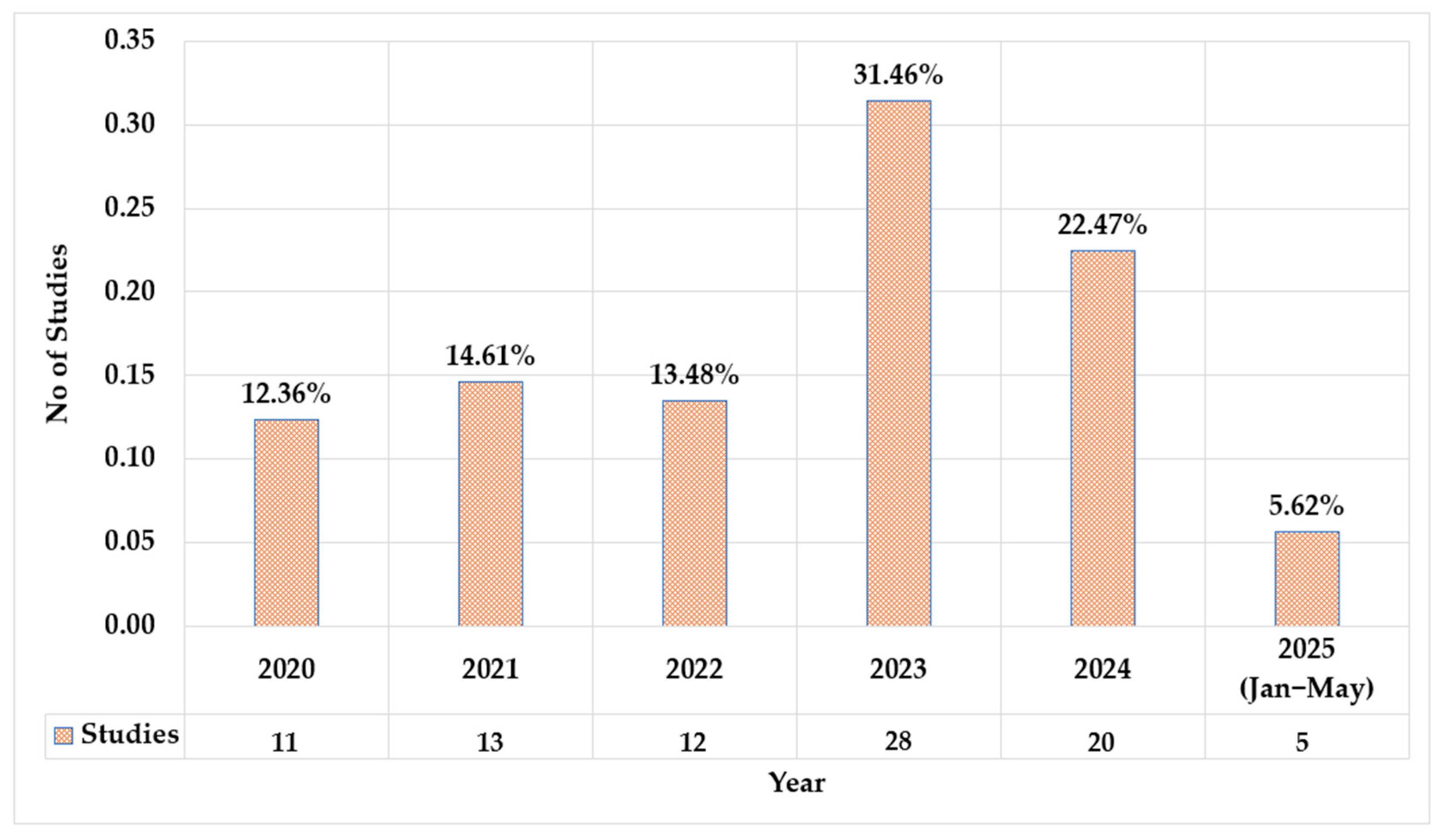
Figure 3 illustrates the annual distribution of studies from 2020 to May 2025. The number of studies remained relatively stable between 2020, 2021, and 2022, ranging from 11, 13, and 12, with corresponding percentages between 12.36%, 14.61%, and 13.48%. A significant increase occurred in 2023, reaching the highest number of studies at 28 (31.46%). This was followed by a slight decrease in 2024, with 20 studies (22.47%). For the partial year of 2025 (January to May), the figure dropped considerably to 5 studies, accounting for only 5.62%. This trend also emphasizes that there is still a demand for development and the filling of research gaps in the domain.
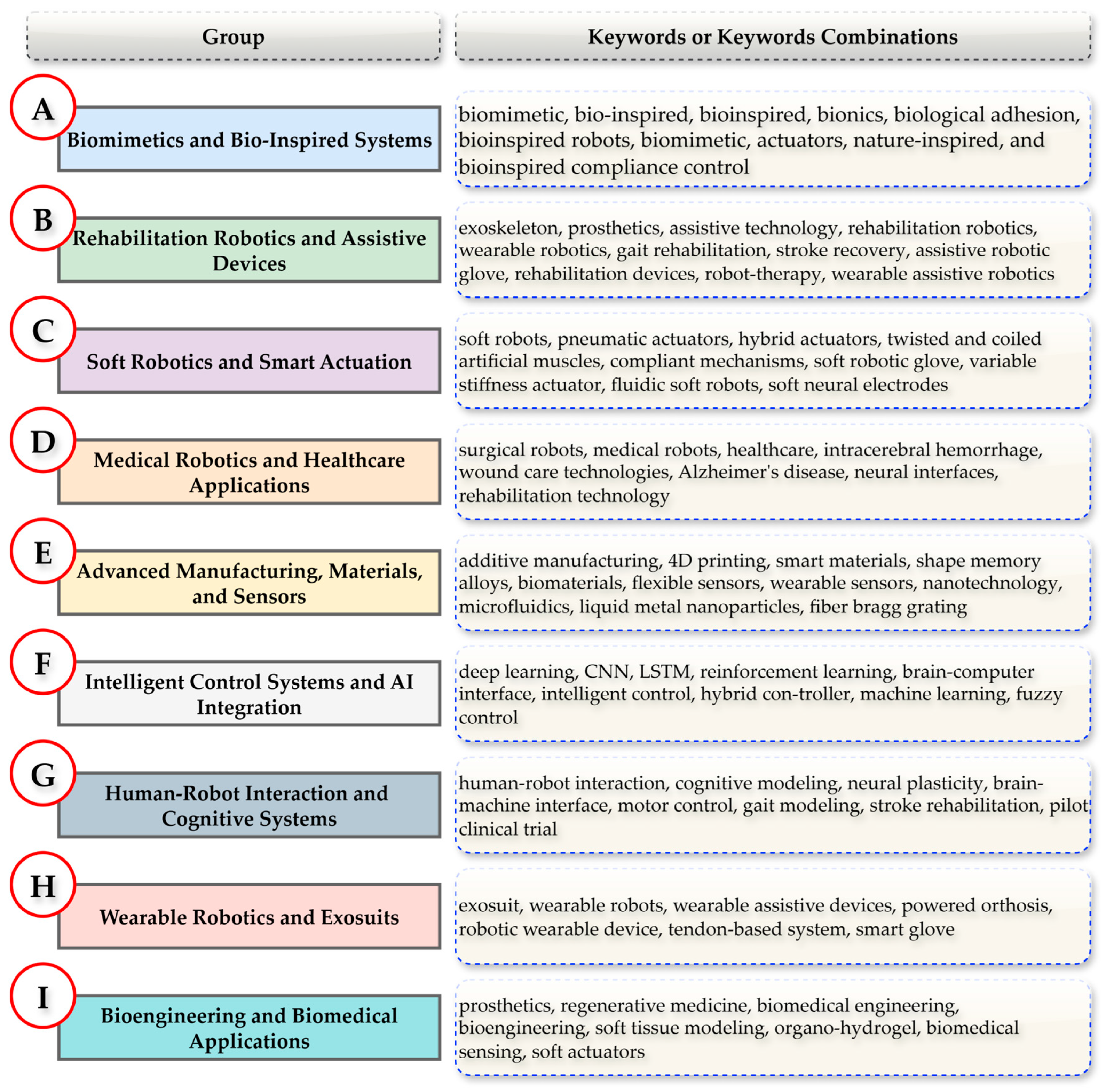
To classify the studies by application domain, the authors organized them into nine distinct groups (Group A–I) based on keywords or keyword combinations. As illustrated in
Figure 4, the sources were assigned to their respective application domains according to the identified keywords or keyword combinations. The methodology employed for this classification process is detailed in Algorithm 1, which outlines the use of predefined keywords to categorize the sources systematically. This keyword-based approach facilitates the grouping of studies within thematically related domains.
| Algorithm 1: Categorization Based on Keywords or Keyword Combinations |
| 1: Load dataset D ← CSV |
| 2: For each record di ∈ D do |
| 3: If di.k = ∅ then |
| 4: di.k ← "" |
| 5: End if |
| 6: di.k ← lowercase(di.k) |
| 7: End for |
| 8: Define category-keyword map: = {c1 ↦ K1,…, cn ↦ Kn} |
| 9: For each di ∈ D do |
| 10: Si ← ∅ |
| 11: For each (cⱼ, Kⱼ) ∈ do |
| 12: If ∃k ∈ Kⱼ such that k ∈ di.k then |
| 13: Si ← Si ∪ {cⱼ} |
| 14: End if |
| 15: End for |
| 16: di.c ← Si |
| 17: End for |
4. Discussion
In recent years, there has been a steady increase in the general trajectory of research in biomimetic robotics and sensing for healthcare applications and rehabilitation, indicating a greater understanding of its revolutionary potential. The number of research studies increased dramatically from 11 to 28 between 2020 and 2023, indicating increased interest and potential enhancements in resource allocation and field-wide collaboration. Significant advancements, such as creating more sophisticated and efficient biomimetic devices, are probably the result of such a surge. Additionally, 20 research studies were still conducted in 2024, demonstrating that this high activity level has continued past the 2023 peak and is not a fad. These encouraging patterns indicate a growing corpus of research emphasizing the significance of biomimetic strategies for assistive healthcare and rehabilitation devices. The expanding body of research may reveal the wider attractiveness of bio-inspired design in addressing complex patient care issues like improving sensory feedback, boosting patient engagement in treatment, and improving mobility. Transforming this study into clinical practice will require sustained funding and interdisciplinary cooperation, guaranteeing that the advancements of the past few years result in observable, practical advantages for both patients and caregivers.
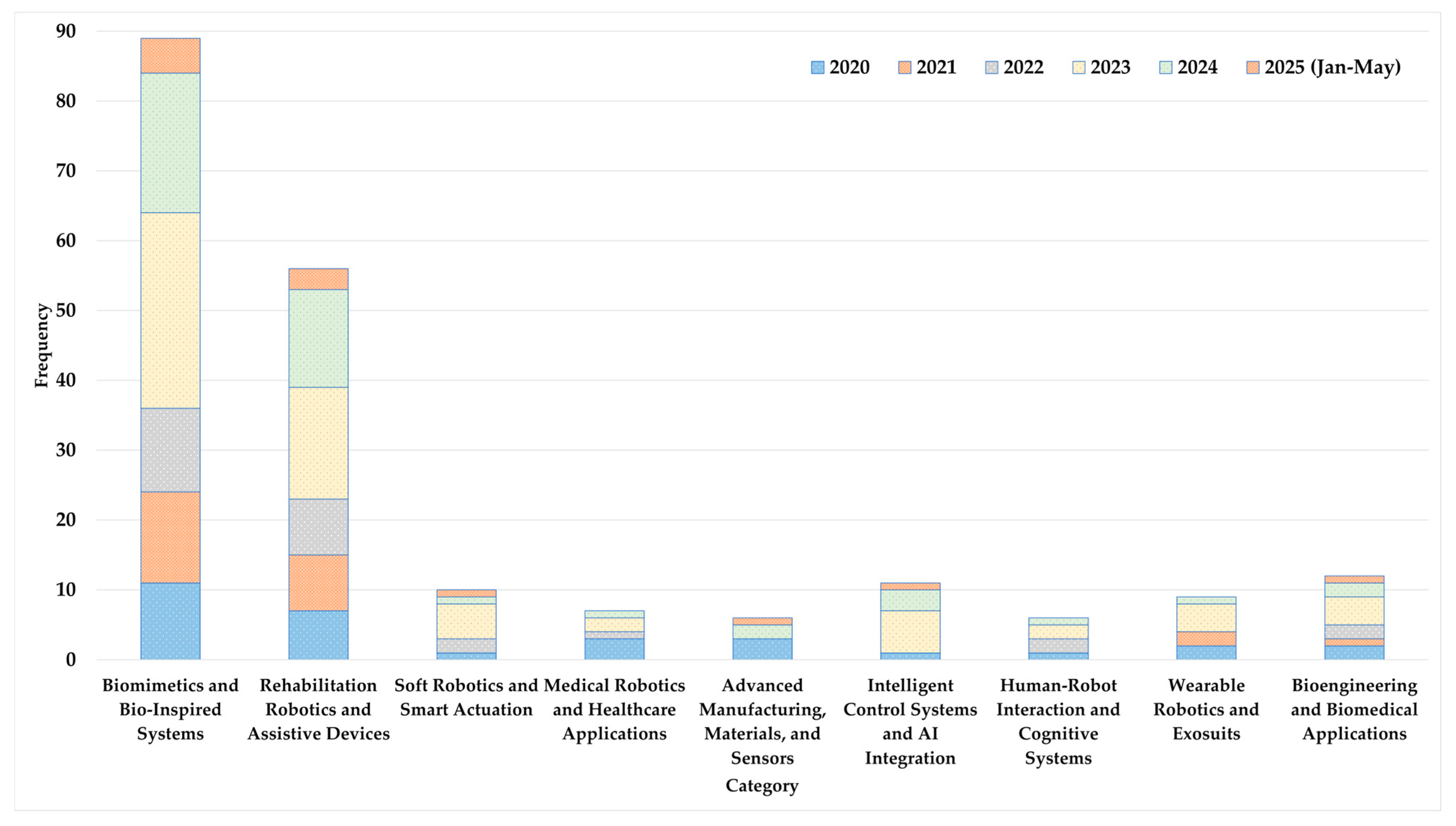
The frequency of domain usages in robotics and related disciplines across different categories is shown in
Figure 5. With 89 occurrences, biomimetics and bio-inspired systems are in the lead, demonstrating their crucial importance in contemporary research and applications. The rising emphasis on healthcare and human mobility solutions is reflected in the 55 instances (61.8%) of rehabilitation robotics and assistive devices that follow. The integration of intelligent algorithms in robotics is highlighted by the 11 appearances (12.36%) of intelligent control systems and AI integration. Innovation in responsive and flexible systems is emphasized in soft robotics with smart actuation (10; 11.24%) and bioengineering and biomedical applications (12; 13.48%). Medical robotics and healthcare applications (7; 7.87%) represent particular applications in healthcare settings, while wearable robotics and exosuits (9; 10.11%) indicate developments in enhancing human capabilities. Emerging multidisciplinary interests are shown by the six appearances (6.74%) of advanced manufacturing, cognitive systems, and human–robot interaction.
Table 5 shows the summary of the review study based on the keywords or keyword combinations available in the main content of the study. The 2020–early 2025 review study groups publications into Groups A–I, emphasizing the interconnection and changing research focuses. With significant overlaps with Groups B, E, and G, Group A had the most references in 2020, indicating foundational explorations. With pieces like [
48,
55,
60,
63,
91,
92,
98], Group B strongly overlapped with Group A, suggesting their interests were similar. Group A led the 2021 landscape, while Groups B and G gained importance, while Groups E and H experienced targeted action. Group A was again in the center by 2022, with growth in Groups B and D following suit, indicating more sophisticated research areas.
Groups C and G continued to be active, but less so. Research output exploded in 2023, with Group A having the most references (see
Table 5), indicating a more thorough thematic investigation. Significant representation was shown by Groups B and F, and Group I’s participation increased as well. Group B (see
Table 5) was the most active during the consolidation phase that began in 2024, while Groups G, H, and I concentrated on recurring themes. Data from January through May of 2025 indicate a slower start, with Groups H and I, while Group B ([
31,
78,
80]) maintained concentration. This progression highlights research themes that are both dynamic and interrelated.
As shown in
Figure 6, research in bioengineering and robotics exhibits noteworthy trends in several domains between 2020 and early 2025. Strong interest in nature-inspired solutions is demonstrated by the consistent leadership of biomimetics and bio-inspired systems, which peaked in 2023 with 28 studies. The steady growth of rehabilitation robotics and assistive devices focuses on enhancing mobility and aiding technology. There is growing interest in flexible robotics, as seen by the moderate but erratic attention given to soft robotics and intelligent actuators. With a focus on continuous healthcare innovation, medical robotics and healthcare applications continue to be active, although at a slower pace. The relevance of advanced manufacturing, materials, sensors, intelligent control systems, and AI integration is increasing. In particular, AI saw a sharp increase in 2023, demonstrating the expanding use of intelligent algorithms. Wearable robotics, bioengineering, and human–robot interaction all make steady but minor contributions, highlighting biomedical and human-centered methods. The evidence points to a vibrant research environment centered on biomimicry, rehabilitation, integrating AI, and improving human–robot cooperation.
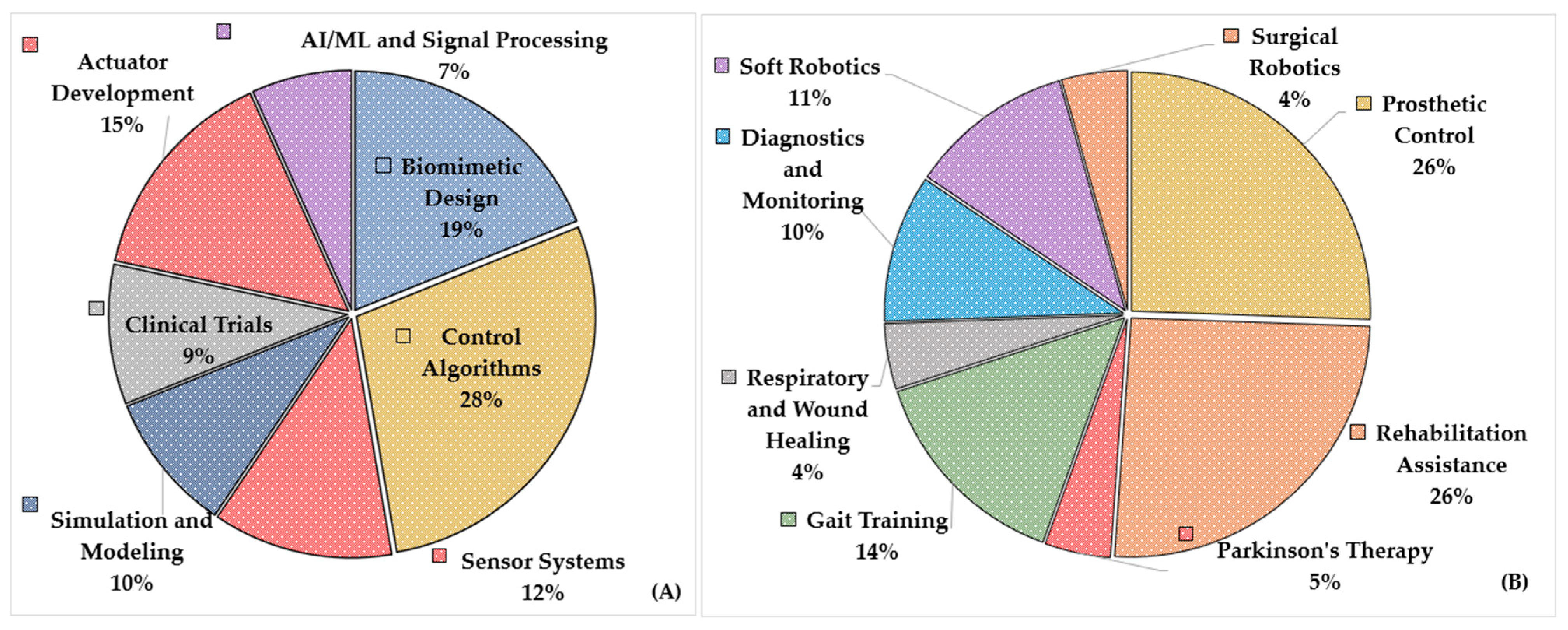
Figure 7A shows the distribution of the studies related to the culmination of methodologies, and
Figure 7B shows clustering based on objectives. Control algorithms dominate the methodological landscape with about 28.4% of the 74 papers. The field’s emphasis on improving feedback systems, adaptive control, and real-time regulation to provide stable and responsive robotic behavior is highlighted by this prominence. The remaining 18.9% of studies are in biomimetic design, which reflects continuous attempts to mimic biological structures and functions in the choice of materials and technology. More than a quarter of the research was focused on sensor systems (12.2%) and actuator development (14.9%), which emphasize ongoing innovation in the “muscle and nervous system” analogs of robotic devices. In the meantime, clinical trials, modeling, and simulation account for roughly 9.5% of the total, showing that theoretical validation and translational research are given equal weight. Lastly, the 6.8% share of AI/ML and signal processing indicates an increasing, albeit still infant, interest in using data-driven methods for pattern identification and decision making.
Prosthetic control and rehabilitation aid are tied for the most common purposes (25.6%) when grouped by objectives (90 studies). This parity indicates that almost half of the selected sources’ research community focused on developing devices and interfaces for rehabilitation and assistance that facilitate movement recovery, which indicates priorities and clinical demand. In total, 14.4% is made up of gait training, which represents specialist therapies for ambulation issues. Diagnostics/monitoring (10.0%) and soft robotics (11.1%) highlight the drive for patient-friendly, compliant equipment and ongoing health monitoring. Other specialized fields include surgical robotics, respiratory and wound healing, and Parkinson’s therapy, each accounting for about 4.4%. These smaller groups could indicate highly specialized or emerging subfields ready to expand.
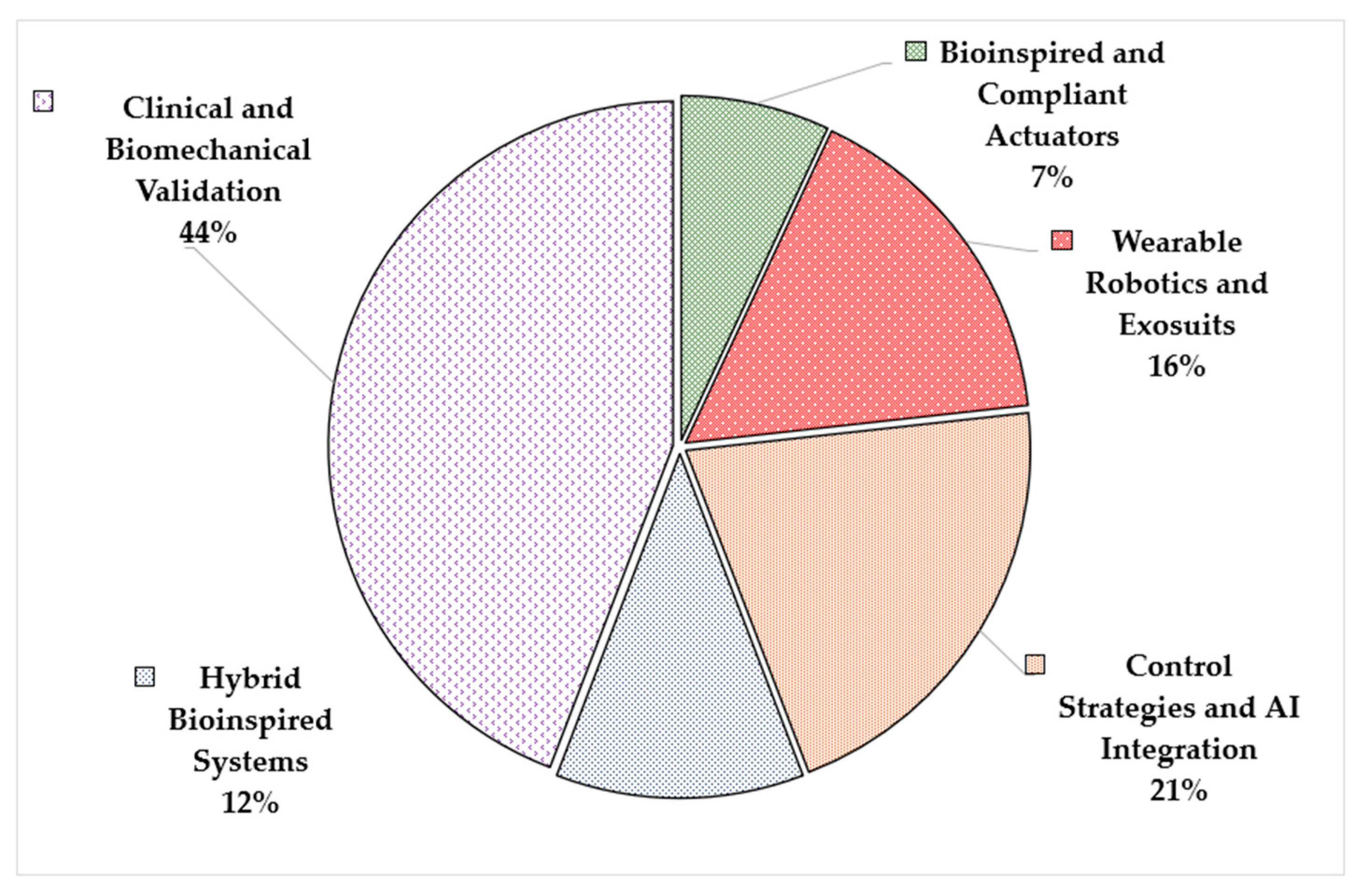
As shown in
Figure 8, the analysis of 43 studies focusing on “bio-inspired exoskeletons and robotics studies” reveals a precise distribution of research efforts. Clinical and biomechanical validation emerges as the most explored topic, accounting for 44.19% of the studies. This emphasizes real-world applications and patient outcomes, reflecting the field’s growing maturity and importance in healthcare. Control Strategies and AI Integration also receive significant attention (20.93%), likely due to the critical role of adaptive algorithms in ensuring safe, responsive interaction between humans and exoskeletons. Research on Wearable Robotics and Exosuits (16.28%) and Hybrid Bio-inspired Systems (11.63%) highlights ongoing efforts to refine and personalize wearable devices. However, Bio-inspired and Compliant Actuators remain underexplored (6.98%), suggesting an opportunity for further innovation in actuation technologies. The distribution reflects a balanced but application-focused research landscape, prioritizing translational impact while recognizing the need for continued technological advancement.
Each abstract and keywords or keyword combinations were examined to identify the specific AI methodology employed, such as neural networks, fuzzy logic, genetic algorithms, etc., based on both explicit mentions and contextual descriptions of algorithmic frameworks.
Table 6 presents an overview of rehabilitation-focused research studies, highlighting the AI methodologies utilized and summarizing the primary contributions discussed in each study.
The prevalence of biomimetics, bio-inspired systems, and rehabilitation robotics in the frequency analysis and the expanding amount of research indicate that nature-inspired solutions are evolving from specialized experiments to become essential components of contemporary healthcare robotics. Intelligent control systems, AI integration, and soft robotics are examples of how biology, engineering, and data science are coming together to provide responsive, flexible, and patient-specific solutions. Though the quick development and clinical testing of bio-inspired exoskeletons and robotics hold out the promise of improving mobility and rehabilitation results, they also bring with them implementation challenges, including the requirement for strong safety regulations, well-defined regulatory processes, and ethical concerns about data privacy in AI-driven systems. Furthermore, the uneven emphasis on actuator development and understudied areas like bio-inspired compliant actuators suggests gaps that need to be filled to realize these devices’ full therapeutic potential, even though the ubiquity of clinical validation initiatives indicates that the field is growing. Additionally, these bio-inspired methods promise more intuitive and effective patient care by utilizing human-like flexibility to develop devices that smoothly integrate with natural movement and offer subtle sensory feedback, essential for engagement and rehabilitation. These technologies’ capacity to handle intricate patient care problems, such as enhancing mobility and providing individualized support, can significantly improve patients’ quality of life while lessening the strain on healthcare systems and caregivers.
In addition to cataloging technological trends, the reviewed studies provide meaningful insights into how biomimetic and bio-inspired systems translate into real-world healthcare settings. For example, high-DOF soft robotic gloves [
25], tendon-driven exosuits [
54], and pediatric hand exoskeletons [
41] have moved beyond laboratory proof-of-concept. They are undergoing clinical testing to support patient-specific motor recovery. Similarly, adaptive control strategies such as EMG-driven impedance modulation [
28,
40] demonstrate strong potential for personalized rehabilitation programs, particularly for stroke or neurodegenerative disease patients. These developments underscore biomimetic devices’ increasing clinical relevance and ability to integrate with real-time feedback systems, thereby enhancing patient outcomes in naturalistic rehabilitation scenarios.
Significantly, wearable robotic technologies, such as the Mag-PGE [
50] and TENG-SPA [
31], demonstrate how rehabilitation tools are becoming more portable, lightweight, and responsive to patient needs, essential for adoption in home-based care and telemedicine models. Using low-cost, smartphone-integrated biosensors [
37] and paper-based diagnostics also reflects a significant shift toward scalable solutions in low-resource environments, extending the global reach of healthcare innovations.
Future research should not only focus on refining technical components such as compliant actuators and AI-driven control systems but also prioritize deployment strategies. These include co-design with clinicians, rigorous longitudinal trials, and economic assessments to evaluate cost-benefit trade-offs. Furthermore, unresolved challenges such as signal degradation in dynamic environments, power efficiency in wearable systems, and dataset scarcity for AI training demand targeted research efforts. By focusing on these areas, the field can ensure that technological advances meaningfully translate into improved care delivery and enhanced quality of life for patients.
However, several critical challenges must be addressed to fully realize the clinical and practical potential of biomimetic and bio-inspired healthcare robotics. Packaging constraints, power consumption, and the overall hardware footprint represent significant barriers to widespread deployment. The reviewed literature underscores the importance of compact, lightweight designs that integrate multiple sensing and actuation components without compromising performance. Power efficiency is especially vital for mobile or wearable systems, prompting the exploration of strategies such as low-power electronics, duty-cycled operation, and energy harvesting through solar, thermal, or vibrational sources. Modular and scalable hardware designs are also emphasized for greater adaptability across diverse clinical environments. Despite these proposed solutions, detailed considerations of packaging techniques, system robustness, and long-term durability under realistic operating conditions remain relatively scarce. These technical limitations are compounded by broader issues, including reliance on complex and often costly materials and fabrication methods, which can hinder scalability and exacerbate disparities in access to care.
To better align biomimetic innovations with real-world clinical applications and to guide future research,
Table 7 summarizes common current limitations and outlines actionable research directions across key domains in this field. These insights reinforce the need for translational frameworks that integrate patient feedback, economic viability, and long-term usability to ensure the success of next-generation biomimetic systems in everyday clinical practice.
Additionally, integrating AI and data-driven systems raises concerns about algorithmic bias, data privacy, and the risk of overdependence on automated decision-making that may fail to account for patient-specific nuances. The technical complexity of these systems also necessitates specialized expertise for operation and maintenance, posing potential barriers in healthcare settings where training resources may be limited. Addressing these multifaceted challenges requires a comprehensive, interdisciplinary approach that fosters collaboration across engineering, biology, clinical practice, ethics, and policy development. Advancing inclusivity, ensuring robust ethical safeguards, and promoting innovation in fundamental technologies and practical deployment strategies will transition these systems from promising research into impactful healthcare solutions.



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}