
Numerical Investigations of Flow over Cambered Deflectors at Re = 1 × 105: A Parametric Study



Abstract
1. Introduction
2. Material and Methods
2.1. Deflector Models
2.2. Viscous Fluid Dynamics Solver
2.2.1. Governing Equations
2.2.2. Computational Domain, Grids and Boundary Conditions
2.2.3. Numerical Schemes
2.3. An Improved Metamodeling Workflow with CFD Simulations
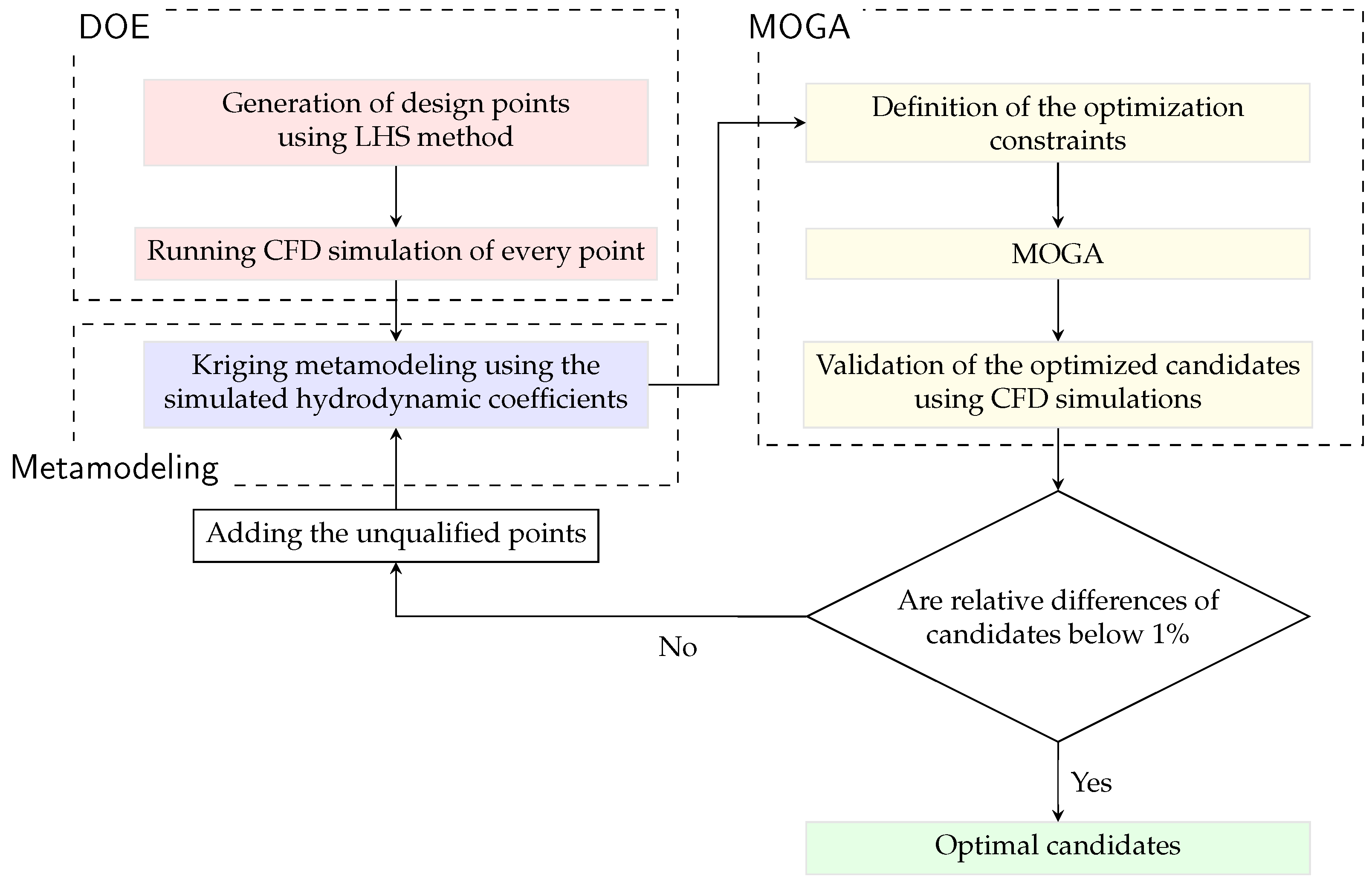
- DOE: As opposed to the typical Monte Carlo random sampling, LHS is introduced in a fully stratified manner, which significantly improves the coverage of multi-dimensional design space [39]. Given an m-dimensional input space (with variables ) and a desired sample size N, LHS partitions the range of each variable into N disjoint equiprobable intervals with equal probability. One random sample is then drawn from each interval of each , yielding N values for each variable. Next, the N values obtained for each are randomly permuted and combined across variables to form N distinct m-dimensional sampling vector. Each such vector contains exactly one value from each , and this construction ensures that each interval of every variable is represented exactly once across the entire sample set. In contrast, the exponential growth of the number of design points with respect to multi-dimensional cases is expected by classical designs like CCD strategy, which proves to be inefficient in engineering fields occasionally [40].
- Metamodeling: Kriging method gives the better unbiased predictions than the polynomial regression analysis [41], showing its flexibility to identify non-linearities with a limited number of observed data. The governing equation for the targeted response is formulated using two terms (Equation (11)). One is the mean response expressed by the polynomial basis, and the other refers to local responses , which obeys the Gaussian distribution with zero mean and non-zero covariance. For the derivation of the unknown of interest, readers are referred to Wang et al. [26].
- MOGA: Following the ideas of the regulated elitism concepts, MOGA is primarily characterized by the Non-dominated Sorted Genetic Algorithm-II (NSGA-II) [42], which aims to identify optimized solutions within multiple predefined constraints. The offspring are generated from the selected chromosomes based on the objectives, utilizing crossover and mutation processes inherent in MOGA. This approach balances the stability and randomness of the population. For a more detailed explanation of the procedures, readers can refer to Wang et al. [26]. In this study, the initial population consists of 3000 samples, with 600 samples generated per iteration. The crossover rate is set at 0.98, while the mutation rate is 0.01. To ensure the algorithm ultimately converges, the maximum allowable number of iterations is 20.
2.4. Data Statistics
3. Results and Discussions
3.1. Validations of the Numerical Method
3.2. Phase 1: Flow over an Isolated Deflector with the Variation of Inclination Angles
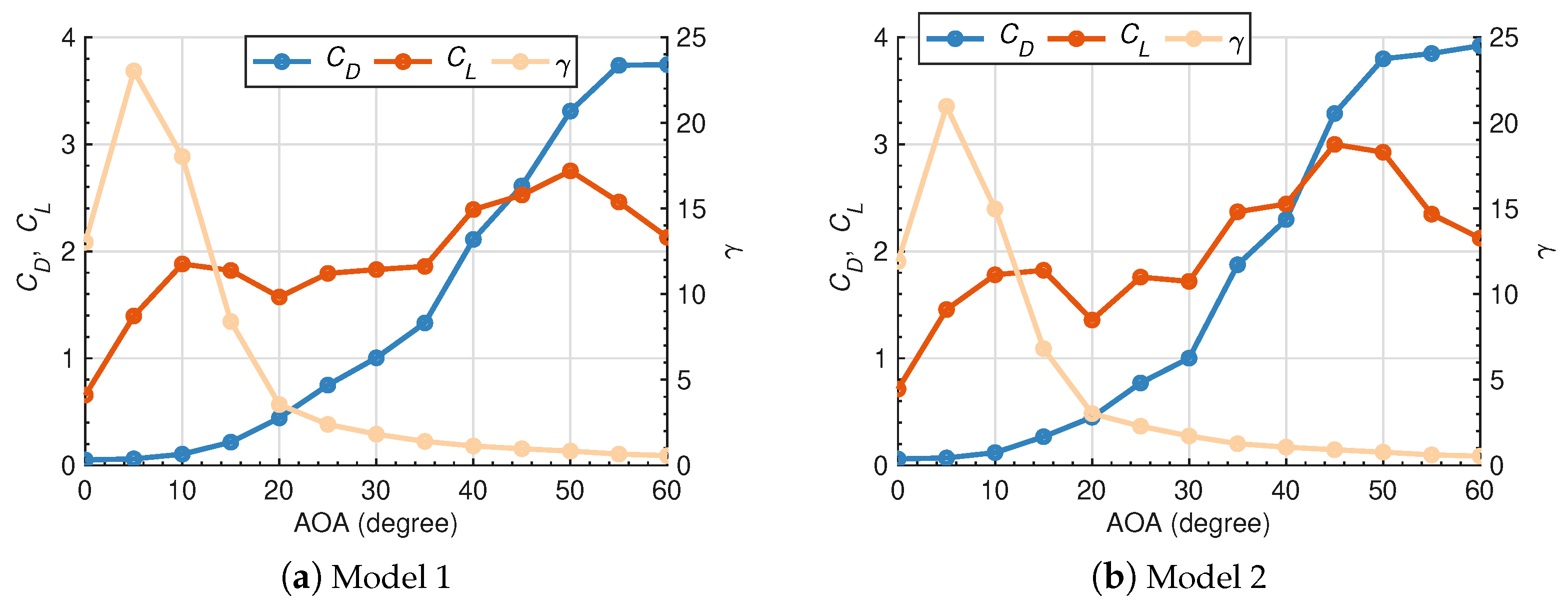
3.2.1. Force Coefficients
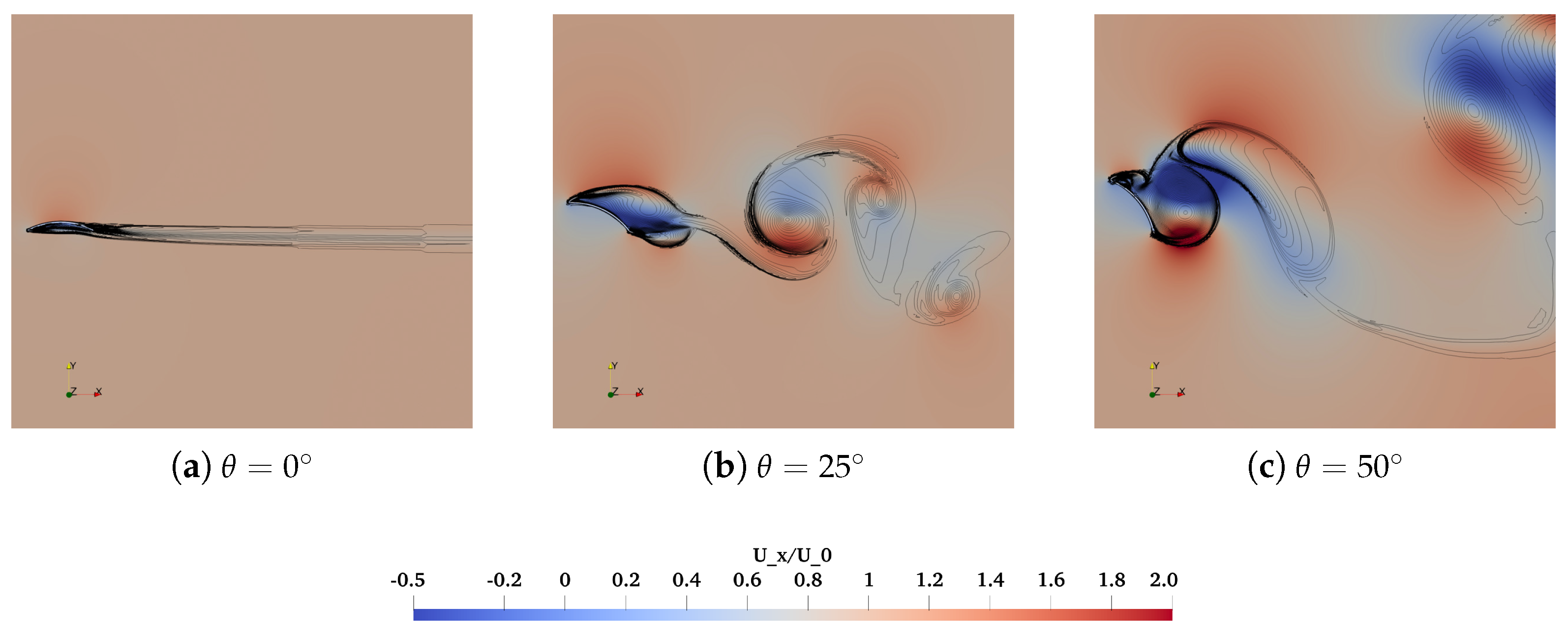
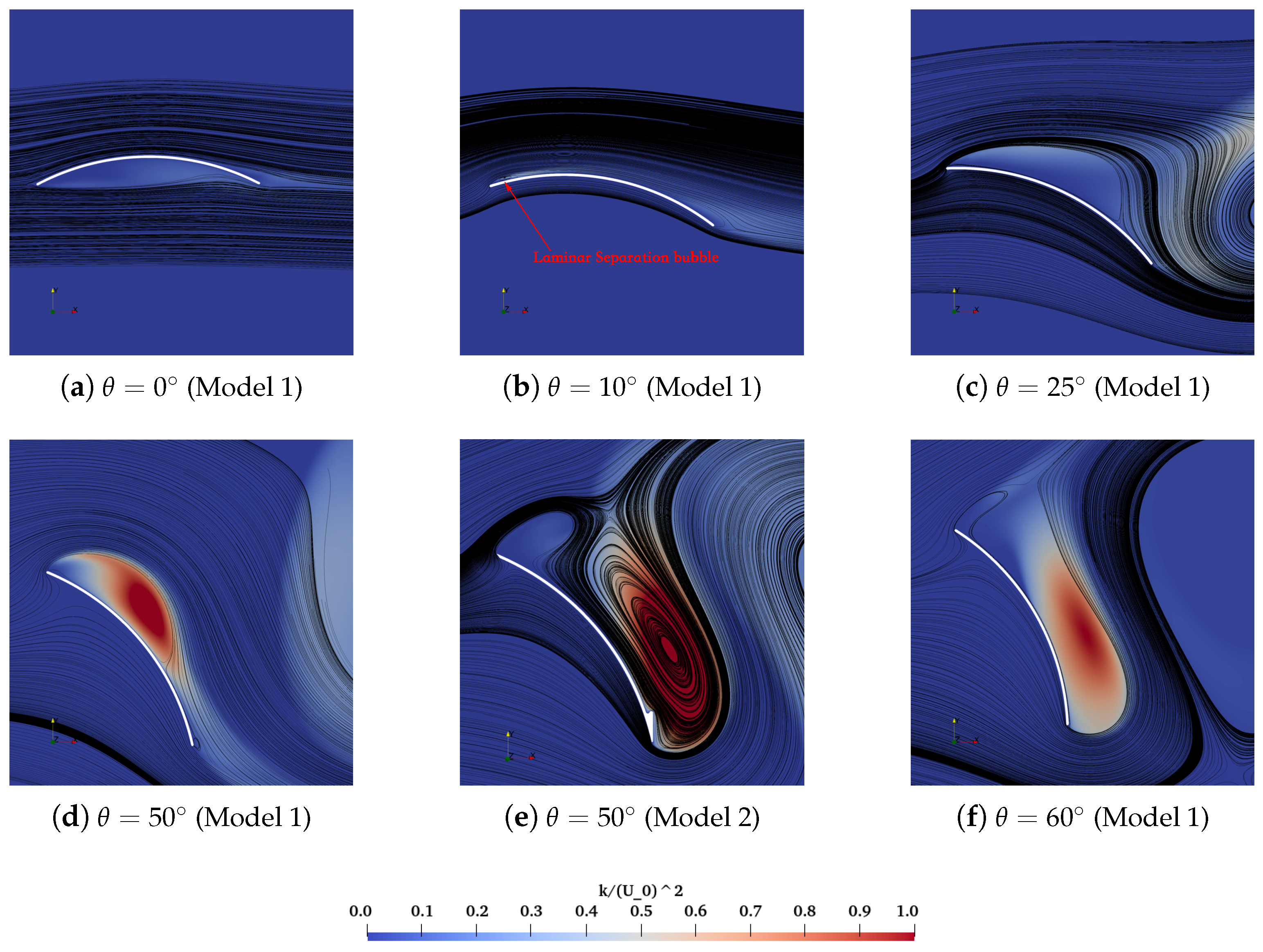
3.2.2. Characteristics of Flow Fields
3.3. Phase 2: The Metamodel of Force Coefficients of Tandem Deflectors
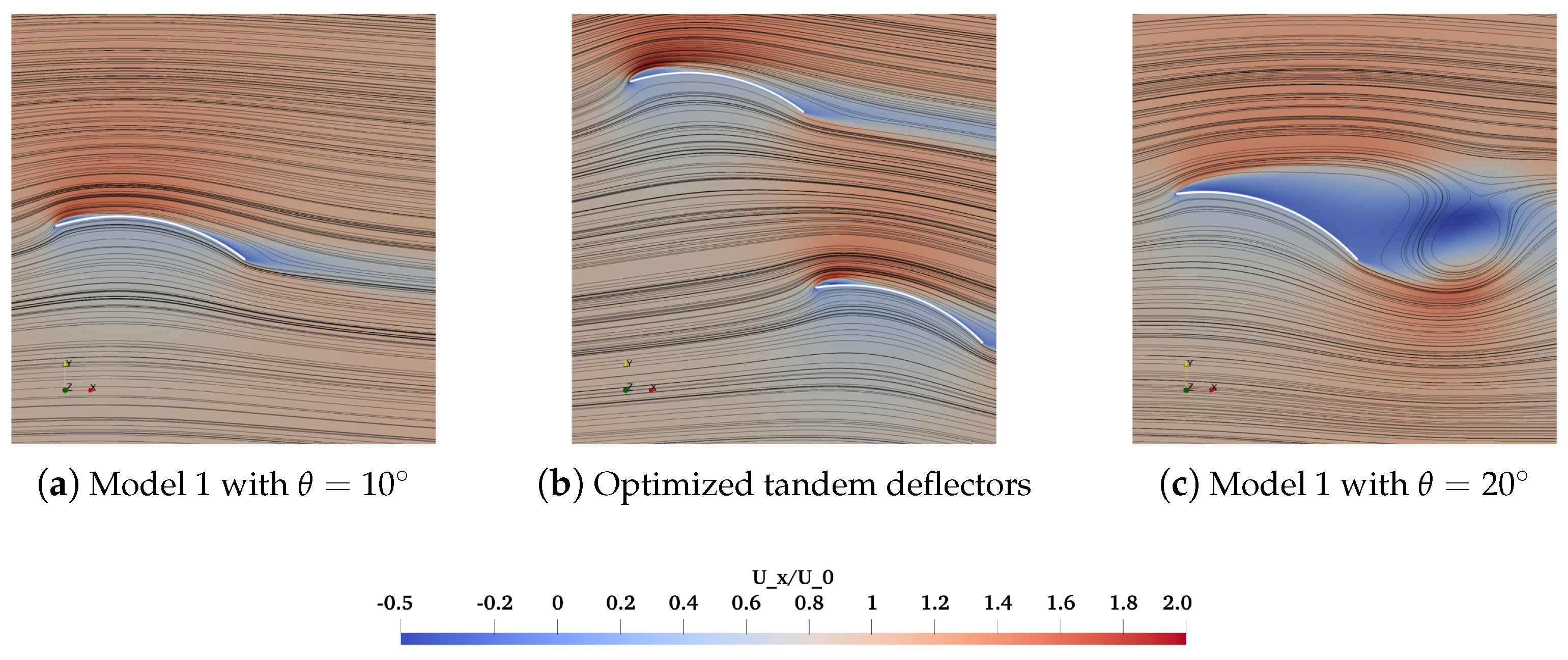
3.4. Phase 3: Hydrodynamics Implications of the Optimized Tandem Deflectors
4. Conclusions and Outlooks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Freestream velocity | |
| Reynolds number | |
| G | Gap |
| S | Stagger |
| Angle of attack | |
| Relative camber | |
| Mean drag coefficient | |
| Mean lift coefficient | |
| Lift-drag ratio | |
| Skin-friction coefficient | |
| Pressure coefficient | |
| k | Turbulent kinetic energy |
| Turbulent specific dissipation rate | |
| Turbulent dissipation rate | |
| CFD | Computational Fluid Dynamics |
| EARSM | Explicit Algebraic Reynolds Stress Model |
| HLTD | Hyper-Lift Trawl Door |
| LSB | Laminar Separation Bubbles |
| MOGA | Multi-Objective Genetic Algorithm |
| PIV | Particle Image Velocimetry |
| RD | Relative Divergences |
| RF | Random Forest |
| SST | Shear Stress Transport |
| URANS | Unsteady Reynolds-Averaged Navier–Stokes |
References
- Katsaprakakis, D.A.; Papadakis, N.; Ntintakis, I. A Comprehensive Analysis of Wind Turbine Blade Damage. Energies 2021, 14, 5974. [Google Scholar] [CrossRef]
- Winslow, J.; Otsuka, H.; Govindarajan, B.; Chopra, I. Basic Understanding of Airfoil Characteristics at Low Reynolds Numbers (104–105). J. Aircr. 2018, 55, 1050–1061. [Google Scholar] [CrossRef]
- Takahashi, Y.; Fujimori, Y.; Hu, F.; Shen, X.; Kimura, N. Design of trawl otter boards using computational fluid dynamics. Fish. Res. 2015, 161, 400–407. [Google Scholar] [CrossRef]
- Hreiz, R.; Sialve, B.; Morchain, J.; Escudié, R.; Steyer, J.P.; Guiraud, P. Experimental and Numerical Investigation of Hydrodynamics in Raceway Reactors Used for Algaculture. Chem. Eng. J. 2014, 250, 230–239. [Google Scholar] [CrossRef]
- Masojídek, J.; Lhotský, R.; Štěrbová, K.; Zittelli, G.C.; Torzillo, G. Solar Bioreactors Used for the Industrial Production of Microalgae. Appl. Microbiol. Biotechnol. 2023, 107, 6439–6458. [Google Scholar] [CrossRef] [PubMed]
- Hoerner, S.H. Fluid-Dynamic Lift; Hoerner Fluid Dynamics: Bakersfield, CA, USA, 1985. [Google Scholar]
- Badrya, C.; Govindarajan, B.; Chopra, I. Basic Understanding of Unsteady Airfoil Aerodynamics at Low Reynolds Numbers. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Tank, J.D.; Klose, B.F.; Jacobs, G.B.; Spedding, G.R. Flow Transitions on a Cambered Airfoil at Moderate Reynolds Number. Phys. Fluids 2021, 33, 093105. [Google Scholar] [CrossRef]
- Di Luca, M.; Mintchev, S.; Su, Y.; Shaw, E.; Breuer, K. A Bioinspired Separated Flow Wing Provides Turbulence Resilience and Aerodynamic Efficiency for Miniature Drones. Sci. Robot. 2020, 5, eaay8533. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Xue, R.; Ma, H. Preliminary aerodynamic exploration for bioinspired separated flow airfoil at low Reynolds number. J. Aerosp. Power 2022, 37, 1516–1527, (In Chinese with English Abstract). [Google Scholar]
- Scharpf, D.F.; Mueller, T.J. Experimental Study of a Low Reynolds Number Tandem Airfoil Configuration. J. Aircr. 1992, 29, 231–236. [Google Scholar] [CrossRef]
- Chen, F.; Yu, J.; Mei, Y. Aerodynamic Design Optimization for Low Reynolds Tandem Airfoil. Proc. Inst. Mech. Eng. Part G 2018, 232, 1047–1062. [Google Scholar] [CrossRef]
- Yin, B.; Guan, Y.; Wen, A.; Karimi, N.; Doranehgard, M.H. Numerical Simulations of Ultra-Low-Re Flow around Two Tandem Airfoils in Ground Effect: Isothermal and Heated Conditions. J. Therm. Anal. Calorim. 2021, 145, 2063–2079. [Google Scholar] [CrossRef]
- Jones, R.; Cleaver, D.J.; Gursul, I. Aerodynamics of Biplane and Tandem Wings at Low Reynolds Numbers. Exp. Fluids 2015, 56, 124. [Google Scholar] [CrossRef]
- Kurt, M.; Eslam Panah, A.; Moored, K.W. Flow Interactions Between Low Aspect Ratio Hydrofoils in In-line and Staggered Arrangements. Biomimetics 2020, 5, 13. [Google Scholar] [CrossRef]
- Shen, X.; Hu, F.; Kumazawa, T.; Shiode, D.; Tokai, T. Hydrodynamic characteristics of a hyper-lift otter board with wing-end plates. Fish. Sci. 2015, 81, 433–442. [Google Scholar] [CrossRef]
- You, X.; Hu, F.; Kumazawa, T.; Shiode, D.; Tokai, T. Performance of new hyper-lift trawl door for both mid-water and bottom trawling. Ocean Eng. 2020, 199, 106989. [Google Scholar] [CrossRef]
- You, X.; Hu, F.; Zhuang, X.; Dong, S.; Shiode, D. Effect of wingtip flow on hydrodynamic characteristics of cambered otter board. Ocean Eng. 2021, 222, 108611. [Google Scholar] [CrossRef]
- You, X.; Hu, F.; Dong, S.; Takahashi, Y.; Shiode, D. Shape optimization approach for cambered otter board using neural network and multi-objective genetic algorithm. Appl. Ocean Res. 2020, 100, 102148. [Google Scholar] [CrossRef]
- You, X.; Hu, F.; Kumazawa, T.; Dong, S.; Shiode, D. Hydrodynamic performance of a newly designed biplane-type hyper-lift trawl door for otter trawling. Appl. Ocean Res. 2020, 104, 102354. [Google Scholar] [CrossRef]
- Zhuang, X.; You, X.; Kumazawa, T.; Shiode, D.; Takahashi, Y.; Hu, F. Effect of spanwise slit on hydrodynamic characteristics of biplane hyper-lift trawl door. Ocean Eng. 2022, 249, 110961. [Google Scholar] [CrossRef]
- Xie, S.j.; Wu, R.k.; Hu, F.x.; Song, W.h. Hydrodynamic Characteristics of the Biplane-Type Otter Board with the Canvas Through Flume-Tank Experiment. China Ocean Eng. 2022, 36, 911–921. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, X.; Wan, R.; Xu, Q.; Qi, G. Optimization of the Hydrodynamic Performance of a Double-Vane Otter Board Based on Orthogonal Experiments. J. Mar. Sci. Eng. 2022, 10, 1177. [Google Scholar] [CrossRef]
- Lin, X.; Zhou, T.; Liu, Y.; Wu, J. A sudden alteration in the self-propulsion of tandem flapping foils. Phys. Fluids 2025, 37, 021915. [Google Scholar] [CrossRef]
- Xu, Q.C.; Feng, C.L.; Huang, L.Y.; Xu, J.Q.; Wang, L.; Zhang, X.; Liang, Z.L.; Tang, Y.L.; Zhao, F.F.; Wang, X.X.; et al. Parameter Optimization of a Double-Deflector Rectangular Cambered Otter Board: Numerical Simulation Study. Ocean Eng. 2018, 162, 108–116. [Google Scholar] [CrossRef]
- Wang, G.; Huang, L.; Wang, L.; Zhao, F.; Li, Y.; Wan, R. A Metamodeling with CFD Method for Hydrodynamic Optimisations of Deflectors on a Multi-Wing Trawl Door. Ocean Eng. 2021, 232, 109045. [Google Scholar] [CrossRef]
- Chu, W.; Cui, S.; Zhai, M.; Cao, Y.; Zhang, X. The Influence of Flow Field Bottom Effect and Sand Cloud Effect on the Hydrodynamic Performance and Stability of Bottom Trawling Otter Board under Tilted Attitudes. Appl. Ocean Res. 2024, 152, 104176. [Google Scholar] [CrossRef]
- Xu, Q.C.; Huang, L.Y.; Liang, Z.L.; Zhao, F.F.; Wang, X.X.; Wan, R.; Tang, Y.L.; Dong, T.W.; Cheng, H.; Xu, J.Q. Experimental and Simulative Study on the Hydrodynamics of the Rectangular Otter Board. In Proceedings of the 2nd Annual International Conference on Advanced Material Engineering (AME 2016), Wuhan, China, 15–17 April 2016. [Google Scholar]
- Traub, L.W. Theoretical and Experimental Investigation of Biplane Delta Wings. J. Aircr. 2001, 38, 536–546. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. In Proceedings of the 4th International Symposium on Turbulence Heat and Mass Transfer, Antalya, Turkey, 12–17 October 2003; Volume 4, pp. 625–632. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998. [Google Scholar]
- Jones, W.; Launder, B. The Calculation of Low-Reynolds-number Phenomena with a Two-Equation Model of Turbulence. Int. J. Heat Mass Transf. 1973, 16, 1119–1130. [Google Scholar] [CrossRef]
- Tian, X.; Ong, M.C.; Yang, J.; Myrhaug, D. Unsteady RANS simulations of flow around rectangular cylinders with different aspect ratios. Ocean Eng. 2013, 58, 208–216. [Google Scholar] [CrossRef]
- Zhao, M.; Wan, D.; Gao, Y. Comparative Study of Different Turbulence Models for Cavitational Flows around NACA0012 Hydrofoil. J. Mar. Sci. Eng. 2021, 9, 742. [Google Scholar] [CrossRef]
- Yin, G.; Andersen, M.; Ong, M.C. Numerical simulations of flow around two tandem wall-mounted structures at high Reynolds numbers. Appl. Ocean Res. 2020, 99, 102124. [Google Scholar] [CrossRef]
- Brørs, B. Numerical Modeling of Flow and Scour at Pipelines. J. Hydraul. Eng. 1999, 125, 511–523. [Google Scholar] [CrossRef]
- Huang, L.; Li, Y.; Wang, G.; Wang, Y.; Wu, Q.; Jia, M.; Wan, R. An Improved Morison Hydrodynamics Model for Knotless Nets Based on CFD and Metamodelling Methods. Aquac. Eng. 2022, 96, 102220. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Wang, G.G. Adaptive Response Surface Method Using Inherited Latin Hypercube Design Points. J. Mech. Des. 2003, 125, 210–220. [Google Scholar] [CrossRef]
- Kleijnen, J.P. Kriging Metamodeling in Simulation: A Review. Eur. J. Oper. Res. 2009, 192, 707–716. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Li, Y.; Huang, L.; Wang, G.; Xu, Q.; Jia, M. Study of the Structural Effects on the Hydrodynamics of a Hollow Rectangular Cambered Otter Board Using the CFD Method. Int. J. Offshore Polar Eng. 2022, 32, 348–355. [Google Scholar] [CrossRef]
- Xu, Q.; Huang, L.; Li, X.; Li, Y.; Zhao, X. Parameter Optimization of a Rectangular Cambered Otter Board Using Response Surface Method. Ocean Eng. 2021, 220, 108475. [Google Scholar] [CrossRef]
- Kurtulus, D.F. On the Unsteady Behavior of the Flow around NACA 0012 Airfoil with Steady External Conditions at Re=1000. Int. J. Micro Air Veh. 2015, 7, 301–326. [Google Scholar] [CrossRef]
- Bak, C.; Madsen, H.A.; Fuglsang, P.; Rasmussen, F. Observations and Hypothesis of Double Stall. Wind Energy 1999, 2, 195–210. [Google Scholar] [CrossRef]
- Ohtake, T.; Nakae, Y.; Motohashi, T. Nonlinearity of the Aerodynamic Characteristics of NACA0012 Aerofoil at Low Reynolds Numbers. J. Jpn. Soc. Aeronaut. Space Sci. 2007, 55, 439–445. [Google Scholar]
- Tanaka, H. Flow Visualization and PIV Measurements of Laminar Separation Bubble Oscillating at Low Frequency on an Airfoil near Stall. In Proceedings of the 24th International Congress of the Aeronautical Sciences, Yokohama, Japan, 29 August–3 September 2004; pp. 1–15. [Google Scholar]
- Choudhry, A.; Arjomandi, M.; Kelso, R. A Study of Long Separation Bubble on Thick Airfoils and Its Consequent Effects. Int. J. Heat Fluid Flow 2015, 52, 84–96. [Google Scholar] [CrossRef]
- Sharma, D.; Goyal, R. Methodologies to Improve the Performance of Vertical Axis Wind Turbine: A Review on Stall Formation and Mitigation. Sustain. Energy Technol. Assessments 2023, 60, 103561. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Janitza, S.; Tutz, G.; Boulesteix, A.L. Random Forest for Ordinal Responses: Prediction and Variable Selection. Comput. Stat. Data Anal. 2016, 96, 57–73. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | G | S | |
|---|---|---|---|
| Range | 0.2c–1.0c | −0.5c–0.5c | – |
| Cases | Outer Grid | Near-Field | Grid | RD (/) [%] | ||
|---|---|---|---|---|---|---|
| Size [m] | Size [m] | Number | ||||
| M1 | 0.030 | 9.38 × 10−4 | 4.05 × 106 | 0.583 | 1.512 | −2.85%/12.54% |
| M2 | 0.025 | 7.81 × 10−4 | 6.82 × 106 | 0.602 | 1.410 | 0.31%/4.92% |
| M3 | 0.020 | 6.25 × 10−4 | 1.29 × 107 | 0.588 | 1.350 | −2.07%/0.45% |
| M4 | 0.015 | 4.69 × 10−4 | 2.38 × 107 | 0.595 | 1.341 | −0.77%/−0.15% |
| Exp. [43] | - | - | - | 0.600 | 1.343 | - |
| / | / | RD | / | RD | |
|---|---|---|---|---|---|
| (Exp. [43]) | (CFD [43]) | Present Study | |||
| 0.234/1.000 | 0.224/1.064 | −4.35%/6.44% | 0.233/0.961 | −0.26%/−3.95% | |
| 0.427/1.417 | 0.410/1.505 | −3.97%/6.22% | 0.434/1.366 | 1.49%/−3.60% | |
| 0.600/1.343 | 0.600/1.508 | 0.00%/12.29% | 0.588/1.350 | −2.07%/0.45% | |
| 0.840/0.993 | 0.820/1.137 | −2.38%/14.43% | 0.797/1.012 | −5.17%/1.91% |
| G | S | ||
|---|---|---|---|
| 23.56% | 67.83% | 8.62% | |
| 30.59% | 49.50% | 19.91% |
| [Degree] | ||||||
|---|---|---|---|---|---|---|
| Metamodel | 0.997 | 19.272 | 0.068 | 0.193 | 2.174 | 11.264 |
| CFD | 0.194 | 2.194 | 11.309 | |||
| |Relative error| | - | - | - | 0.72% | 0.90% | 0.40% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Wang, Z.; Jiao, Z.; Gong, P.; Guan, C. Numerical Investigations of Flow over Cambered Deflectors at Re = 1 × 105: A Parametric Study. Biomimetics 2025, 10, 385. https://doi.org/10.3390/biomimetics10060385
Wang G, Wang Z, Jiao Z, Gong P, Guan C. Numerical Investigations of Flow over Cambered Deflectors at Re = 1 × 105: A Parametric Study. Biomimetics. 2025; 10(6):385. https://doi.org/10.3390/biomimetics10060385
Chicago/Turabian StyleWang, Gang, Zhi Wang, Zhaoqi Jiao, Pihai Gong, and Changtao Guan. 2025. "Numerical Investigations of Flow over Cambered Deflectors at Re = 1 × 105: A Parametric Study" Biomimetics 10, no. 6: 385. https://doi.org/10.3390/biomimetics10060385
APA StyleWang, G., Wang, Z., Jiao, Z., Gong, P., & Guan, C. (2025). Numerical Investigations of Flow over Cambered Deflectors at Re = 1 × 105: A Parametric Study. Biomimetics, 10(6), 385. https://doi.org/10.3390/biomimetics10060385