
Octopus-Inspired Biomimetic Annular Sealing Grooves: Design and Performance Optimization Under Extreme Conditions


 and
and 
Abstract
1. Introduction
2. Structural Characterization and Adsorption Mechanism of Octopus Suckers
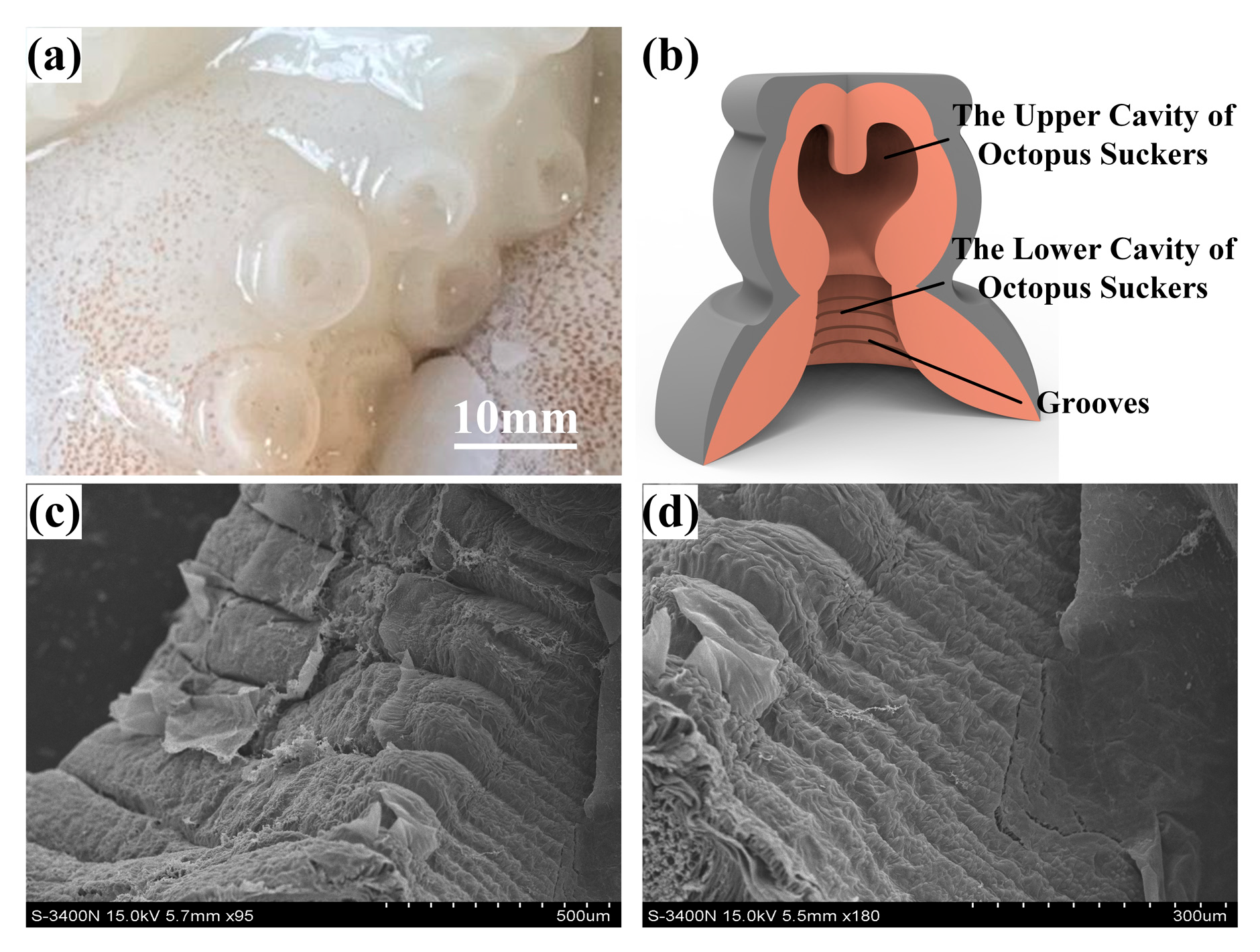
2.1. Biological Structure of Octopus Suckers
2.2. Adsorption Mechanism
3. Innovative Design of Annular Sealing Grooves Inspired by Octopus Suckers
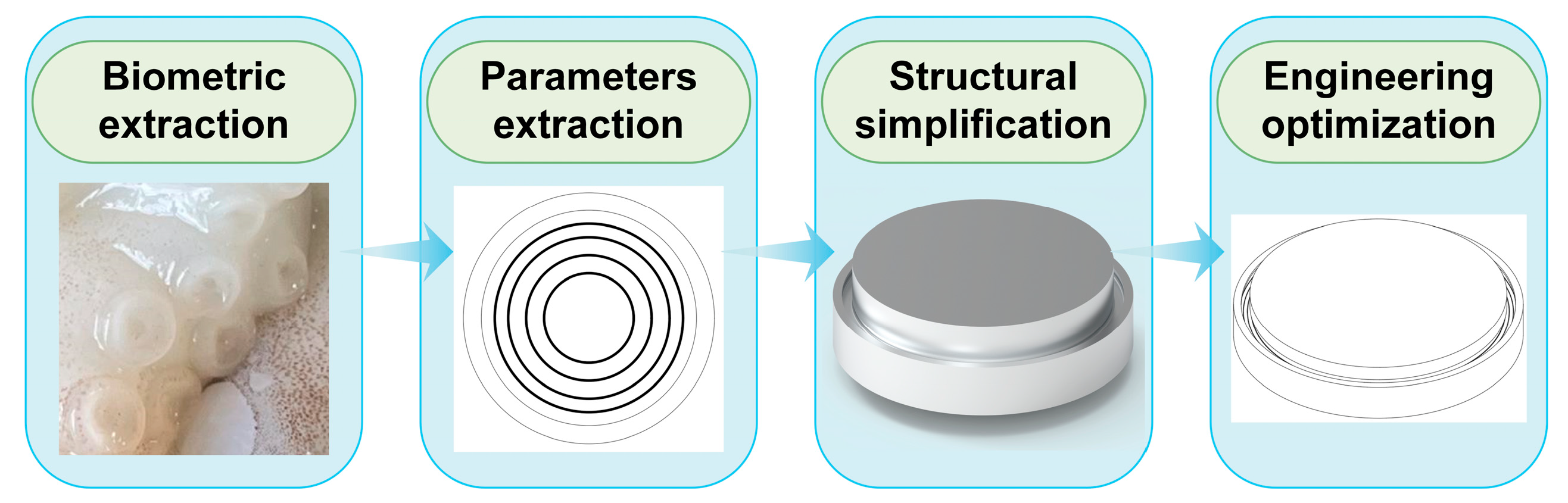
3.1. Methodology Transfer
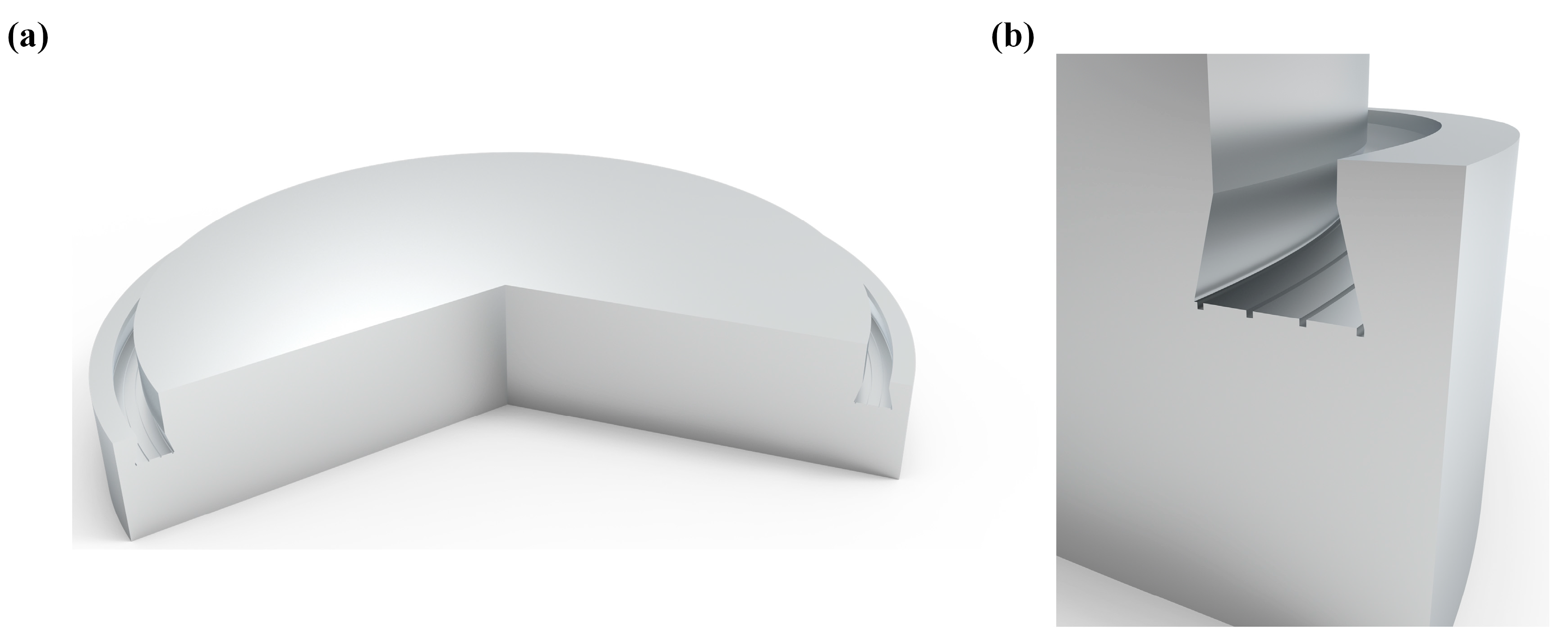
3.2. Sealing Structure
3.3. Structural Design Innovations
3.4. Innovation in Sealing Principle
3.5. Prototype Implementation
4. Performance Research Based on Simulation Tests
4.1. Simulation Analysis Method
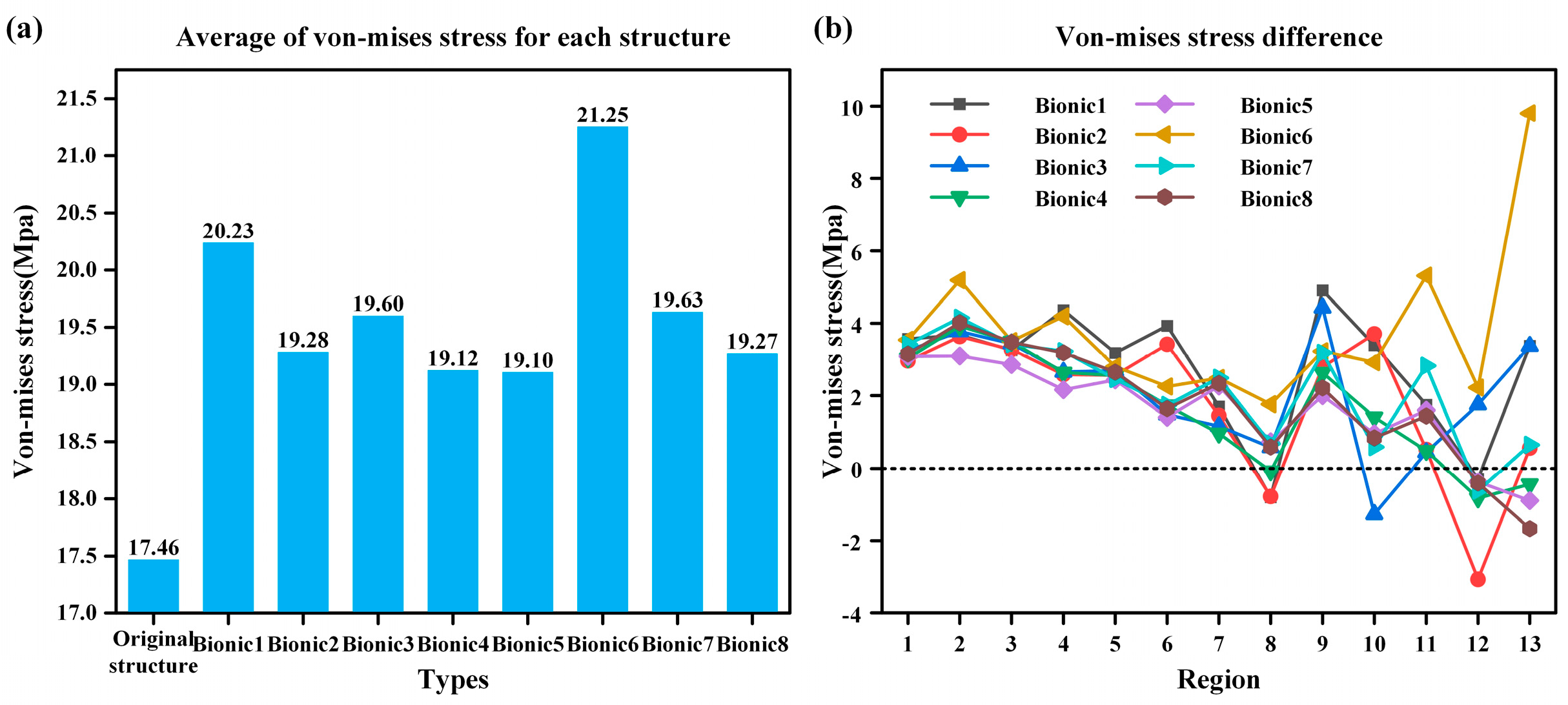
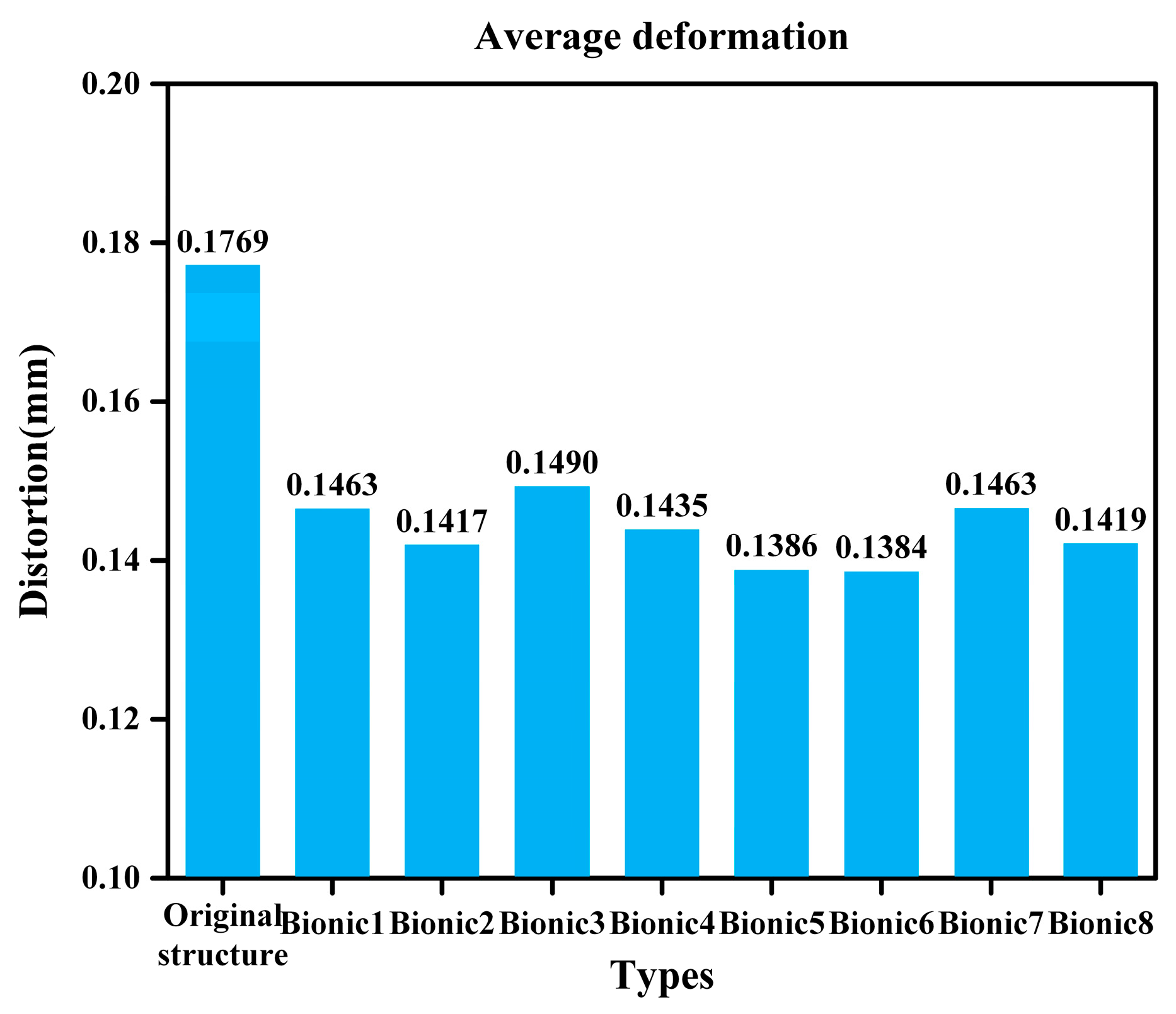
4.2. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, S.; Xiao, X.; Ma, X.; Li, Z.; Liu, Y.; Li, J.; Wang, D.; Li, X. Research on Dynamic Sealing Performance of Combined Sealing Structure under Extreme Working Conditions. Appl. Sci. 2023, 13, 10100. [Google Scholar] [CrossRef]
- Wang, Y.; Niu, S.; Zhang, J.; Feng, C.; Wang, Y.; Shen, D.; Li, D.; Li, T.; Cao, P.; Zhang, Y. Development Status of Dynamic Sealing Technology and Discussion on Advanced Sealing Technologies. Lubricants 2025, 13, 11. [Google Scholar] [CrossRef]
- He, S.; Peng, Y.; Qiu, S.; Du, X.; Jin, Y. Sealing Performance of Sealing Structure in a Sediment Sampler under Ultra-High Pressure. Sci. Rep. 2023, 13, 18548. [Google Scholar] [CrossRef]
- Akulichev, A.G.; Echtermeyer, A.T.; Persson, B.N.J. Interfacial Leakage of Elastomer Seals at Low Temperatures. Int. J. Press. Vessel. Pip. 2018, 160, 14–23. [Google Scholar] [CrossRef]
- Jaunich, M.; von der Ehe, K.; Wolff, D.; Voelzke, H.; Stark, W. Understanding Low Temperature Properties of Elastomer Seals. Packag. Transp. Storage Secur. Radioact. Mater. 2011, 22, 83–88. [Google Scholar] [CrossRef]
- Grelle, T.; Wolff, D.; Jaunich, M. Leakage Behaviour of Elastomer Seals under Dynamic Unloading Conditions at Low Temperatures. Polym. Test. 2017, 58, 219–226. [Google Scholar] [CrossRef]
- Jiang, J.-B.; Peng, X.-D.; Li, J.-Y.; Chen, Y. Leakage and Stiffness Characteristics of Bionic Cluster Spiral Groove Dry Gas Seal. Chin. J. Mech. Eng. 2018, 31, 21. [Google Scholar] [CrossRef]
- Jiang, J.; Peng, X.; Li, J.; Chen, Y. A Comparative Study on the Performance of Typical Types of Bionic Groove Dry Gas Seal Based on Bird Wing. J. Bionic Eng. 2016, 13, 324–334. [Google Scholar] [CrossRef]
- Kang, M.; Sun, K.; Seong, M.; Hwang, I.; Jang, H.; Park, S.; Choi, G.; Lee, S.-H.; Kim, J.; Jeong, H.E. Applications of Bioinspired Reversible Dry and Wet Adhesives: A Review. Front. Mech. Eng. 2021, 7, 20190131. [Google Scholar] [CrossRef]
- Xi, P.; Cong, Q.; Xu, J.; Qiu, K. Design, Experiment and Adsorption Mechanism Analysis of Bionic Sucker Based on Octopus Sucker. Proc. Inst. Mech. Eng. H 2019, 233, 1250–1261. [Google Scholar] [CrossRef]
- Baik, S.; Lee, H.J.; Kim, D.W.; Min, H.; Pang, C. Capillarity-Enhanced Organ-Attachable Adhesive with Highly Drainable Wrinkled Octopus-Inspired Architectures. ACS Appl. Mater. Interfaces 2019, 11, 25674–25681. [Google Scholar] [CrossRef] [PubMed]
- Tramacere, F.; Kovalev, A.; Kleinteich, T.; Gorb, S.N.; Mazzolai, B. Structure and Mechanical Properties of Octopus Vulgaris Suckers. J. R. Soc. Interface 2014, 11, 20130816. [Google Scholar] [CrossRef]
- Yu, Z.; Jiang, J.; Zhang, X.; Zhang, M.; Li, C. Comparative Study on the Leakage Characteristics and Parameter Influence of Bio-Inspired Fishway Staggered Labyrinth Seals. Lubricants 2025, 13, 95. [Google Scholar] [CrossRef]
- Xu, J.; Wang, L.; Zhang, D.; Shi, X.; Chen, T.; Cong, Q.; Liu, C. Bionic Ring Grooves Design and Experiment of the Suction Cup Applied in Oil-Immersed Substrate. Lubricants 2023, 11, 152. [Google Scholar] [CrossRef]
- Zhang, E.; Feng, J.; Zhang, X.; Watanabe, T.; Himeno, T.; Bai, B. A Novel Prediction Model for Leakage Flow of Scallop Bionic Damper Seals Operating in the Supercritical CO2 Compressor. Energy 2025, 314, 134248. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, J.; Chen, L.M. Design and Seal Performance Analysis of Bionic Sealing Ring for Dynamic Seal. Mechanics 2020, 26, 338–345. [Google Scholar] [CrossRef]
- Pi, J.; Liu, J.; Zhou, K.; Qian, M. An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping. Agriculture 2021, 11, 1014. [Google Scholar] [CrossRef]
- Chen, H.; Yan, Z.; Dai, W.; Zheng, Z.; Bie, Y.; Chen, Y. Numerical Simulation of the Lubrication Characteristics of Bionic Surface Textures on Mechanical Sealing Rings. J. Phys. Conf. Ser. 2024, 2740, 012015. [Google Scholar] [CrossRef]
- Han, C.; Zhang, H.; Zhang, J. Structural Design and Sealing Performance Analysis of Biomimetic Sealing Ring. Appl. Bionics Biomech. 2015, 2015, 358417. [Google Scholar] [CrossRef]
- Yan, N.; Wang, X.; Wu, X.; Zhu, J. Study on the Form of Sealing Ring and Its Sealing Characteristics of Centrifugal Pump. J. Phys. Conf. Ser. 2024, 2752, 012117. [Google Scholar] [CrossRef]
- Xi, P.; Qiao, Y.; Nie, X.; Cong, Q. Bionic Design and Adsorption Performance Analysis of Vacuum Suckers. Biomimetics 2024, 9, 623. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Cui, Y.; Wang, J.; Wang, M. Effect of Snake-Biomimetic Surface Texture on Finger Sealing Performance under Hydrodynamic Lubrication. Surf. Topogr. Metrol. Prop. 2021, 9, 035040. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.; He, Y.; Zhou, K.; Zhu, L. Octopus-Inspired Sucker to Absorb Soft Tissues: Stiffness Gradient and Acetabular Protuberance Improve the Adsorption Effect. Bioinspir. Biomim. 2022, 17, 036005. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Liu, Y. Newly Structured Design and Finite Element Analysis of Bionic Nonsmooth Surface Sealing Ring of Cone Bit. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Gao, T.; Su, B.; Jiang, L.; Cong, Q. Influence of Bionic Pit Structure on Friction and Sealing Performance of Reciprocating Plunger. Adv. Mater. Sci. Eng. 2020, 2020, 2130341. [Google Scholar] [CrossRef]
- Gu, Y.; Zhao, G.; Liu, H.; Zheng, J.; Ru, J.; Liu, M.; Chatto, A.R.; Wang, C. Characteristics of Seal Shell Body’s Rubber Ring with Bionic Dimpled Surfaces of Aerodynamic Extinguishing Cannon. J. Cent. South. Univ. 2013, 20, 3065–3076. [Google Scholar] [CrossRef]
- Cong, Q.; Gao, T.; Sun, Y.; Tian, W. Sealing Performance of Bionic Striped Mud Pump Piston. Adv. Mater. Sci. Eng. 2019, 2019, 8751540. [Google Scholar] [CrossRef]
- Hou, J.; Wright, E.; Bonser, R.H.C.; Jeronimidis, G. Development of Biomimetic Squid-Inspired Suckers. J. Bionic Eng. 2012, 9, 484–493. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, G.; Li, Z.; Zhang, W.; Meng, Q. Flexible Tactile Sensors with Biomimetic Microstructures: Mechanisms, Fabrication, and Applications. Adv. Colloid. Interface Sci. 2023, 320, 102988. [Google Scholar] [CrossRef]
- Sareh, S.; Althoefer, K.; Li, M.; Noh, Y.; Tramacere, F.; Sareh, P.; Mazzolai, B.; Kovac, M. Anchoring like Octopus: Biologically Inspired Soft Artificial Sucker. J. R. Soc. Interface 2017, 14, 20170395. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Suction Cup Serial Number | Recess Depth H (mm) | Notch Width L (mm) |
|---|---|---|
| 1 | 0.19 | 0.16 |
| 2 | 0.23 | 0.17 |
| 3 | 0.39 | 0.38 |
| 4 | 0.25 | 0.19 |
| 5 | 0.17 | 0.21 |
| 6 | 0.40 | 0.16 |
| 7 | 0.28 | 0.30 |
| 8 | 0.35 | 0.31 |
| 9 | 0.30 | 0.22 |
| 10 | 0.42 | 0.33 |
| Serial Number | Groove Width L (mm) | Groove Depth H (mm) | Number of Grooves | Groove Spacing (mm) |
|---|---|---|---|---|
| bionic1 | 0.2 | 0.2 | 4 | 1.4 |
| bionic2 | 0.2 | 0.4 | 4 | 1.4 |
| bionic3 | 0.4 | 0.2 | 4 | 1.4 |
| bionic4 | 0.4 | 0.4 | 4 | 1.4 |
| bionic5 | 0.2 | 0.2 | 7 | 0.7 |
| bionic6 | 0.2 | 0.4 | 7 | 0.7 |
| bionic7 | 0.4 | 0.2 | 7 | 0.7 |
| bionic8 | 0.4 | 0.4 | 7 | 0.7 |
| Region | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| initial model | 21.457 | 19.910 | 18.672 | 17.825 | 17.465 | 17.452 | 16.914 | 16.646 | 16.370 | 16.096 | 15.895 | 16.128 | 16.157 |
| bionic1 | 19.728 | 19.807 | 19.152 | 20.462 | 19.551 | 20.580 | 18.613 | 16.646 | 22.376 | 21.219 | 20.418 | 19.617 | 24.840 |
| bionic2 | 19.119 | 19.765 | 19.169 | 18.678 | 18.933 | 20.063 | 18.366 | 16.669 | 20.254 | 21.532 | 19.190 | 16.848 | 22.012 |
| bionic3 | 19.407 | 19.904 | 19.337 | 18.750 | 19.058 | 18.125 | 18.076 | 18.027 | 21.895 | 16.556 | 19.111 | 21.663 | 24.829 |
| bionic4 | 19.194 | 20.051 | 19.392 | 18.733 | 18.929 | 18.381 | 17.876 | 17.371 | 20.098 | 19.232 | 19.156 | 19.080 | 21.015 |
| bionic5 | 19.241 | 19.224 | 18.755 | 18.260 | 18.803 | 18.048 | 19.178 | 18.183 | 19.464 | 18.780 | 20.269 | 19.533 | 20.56 |
| bionic6 | 19.700 | 21.315 | 19.404 | 20.287 | 19.172 | 18.897 | 19.399 | 19.217 | 20.694 | 20.746 | 23.987 | 22.13 | 31.255 |
| bionic7 | 19.574 | 20.275 | 19.321 | 19.323 | 18.828 | 18.383 | 19.403 | 18.127 | 20.645 | 18.409 | 21.498 | 19.283 | 22.100 |
| bionic8 | 19.310 | 20.147 | 19.372 | 19.281 | 19.022 | 18.289 | 19.251 | 18.034 | 19.679 | 18.664 | 20.108 | 19.499 | 19.789 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Xu, S.; Guan, X.; Wang, Z.; Qi, Z.; Ye, X.; Dong, J.; Yao, Y.; Mu, Z. Octopus-Inspired Biomimetic Annular Sealing Grooves: Design and Performance Optimization Under Extreme Conditions. Biomimetics 2025, 10, 322. https://doi.org/10.3390/biomimetics10050322
Pan Z, Xu S, Guan X, Wang Z, Qi Z, Ye X, Dong J, Yao Y, Mu Z. Octopus-Inspired Biomimetic Annular Sealing Grooves: Design and Performance Optimization Under Extreme Conditions. Biomimetics. 2025; 10(5):322. https://doi.org/10.3390/biomimetics10050322
Chicago/Turabian StylePan, Zhipeng, Shijun Xu, Xiang Guan, Zhihong Wang, Zhenghai Qi, Xiangrui Ye, Jianyang Dong, Yongming Yao, and Zhengzhi Mu. 2025. "Octopus-Inspired Biomimetic Annular Sealing Grooves: Design and Performance Optimization Under Extreme Conditions" Biomimetics 10, no. 5: 322. https://doi.org/10.3390/biomimetics10050322
APA StylePan, Z., Xu, S., Guan, X., Wang, Z., Qi, Z., Ye, X., Dong, J., Yao, Y., & Mu, Z. (2025). Octopus-Inspired Biomimetic Annular Sealing Grooves: Design and Performance Optimization Under Extreme Conditions. Biomimetics, 10(5), 322. https://doi.org/10.3390/biomimetics10050322