

Development of a Bayesian Network-Based Parallel Mechanism for Lower Limb Gait Rehabilitation

 , , ,
, , ,
Abstract
1. Introduction
2. Related Research
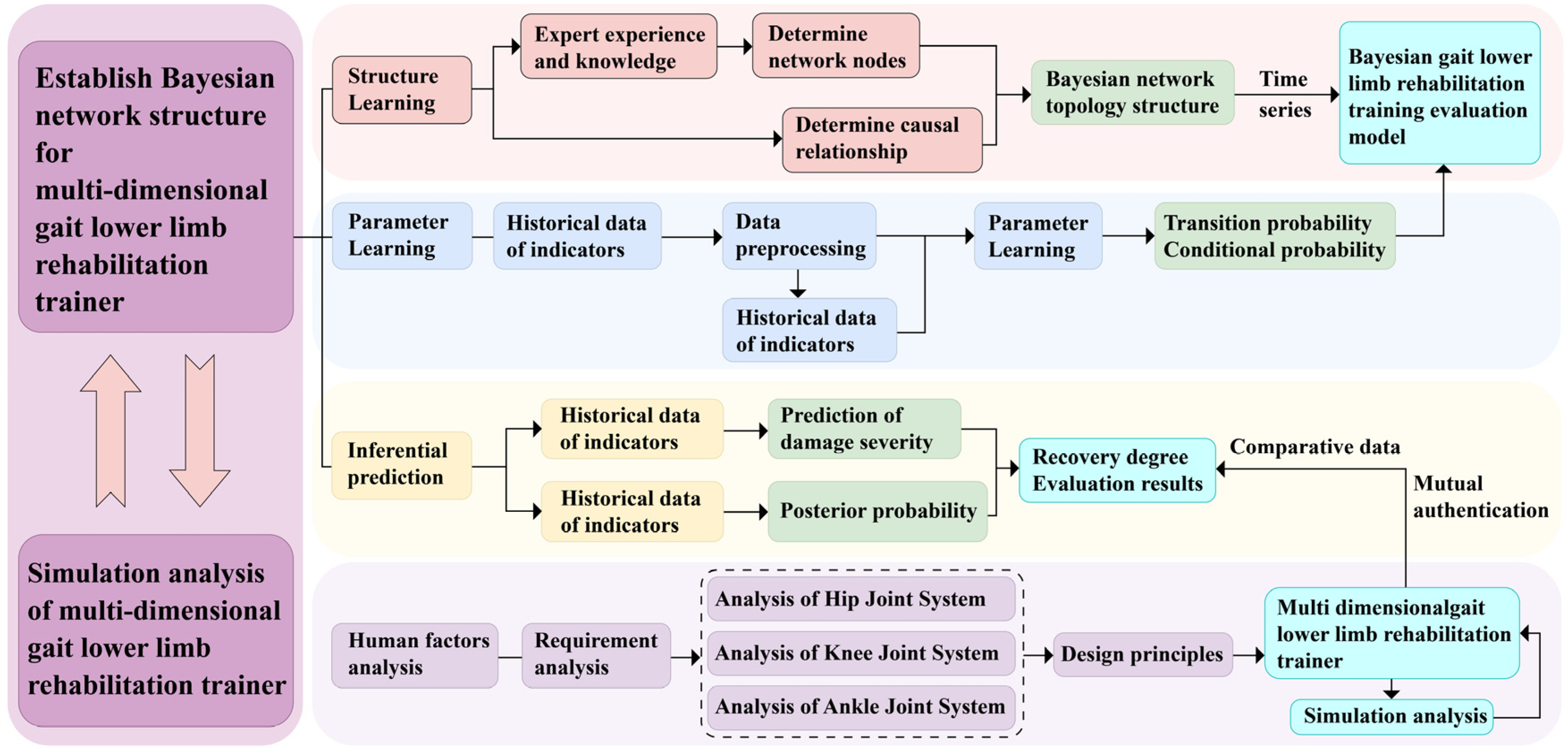
3. Patient-Centric Bayesian Network Modeling
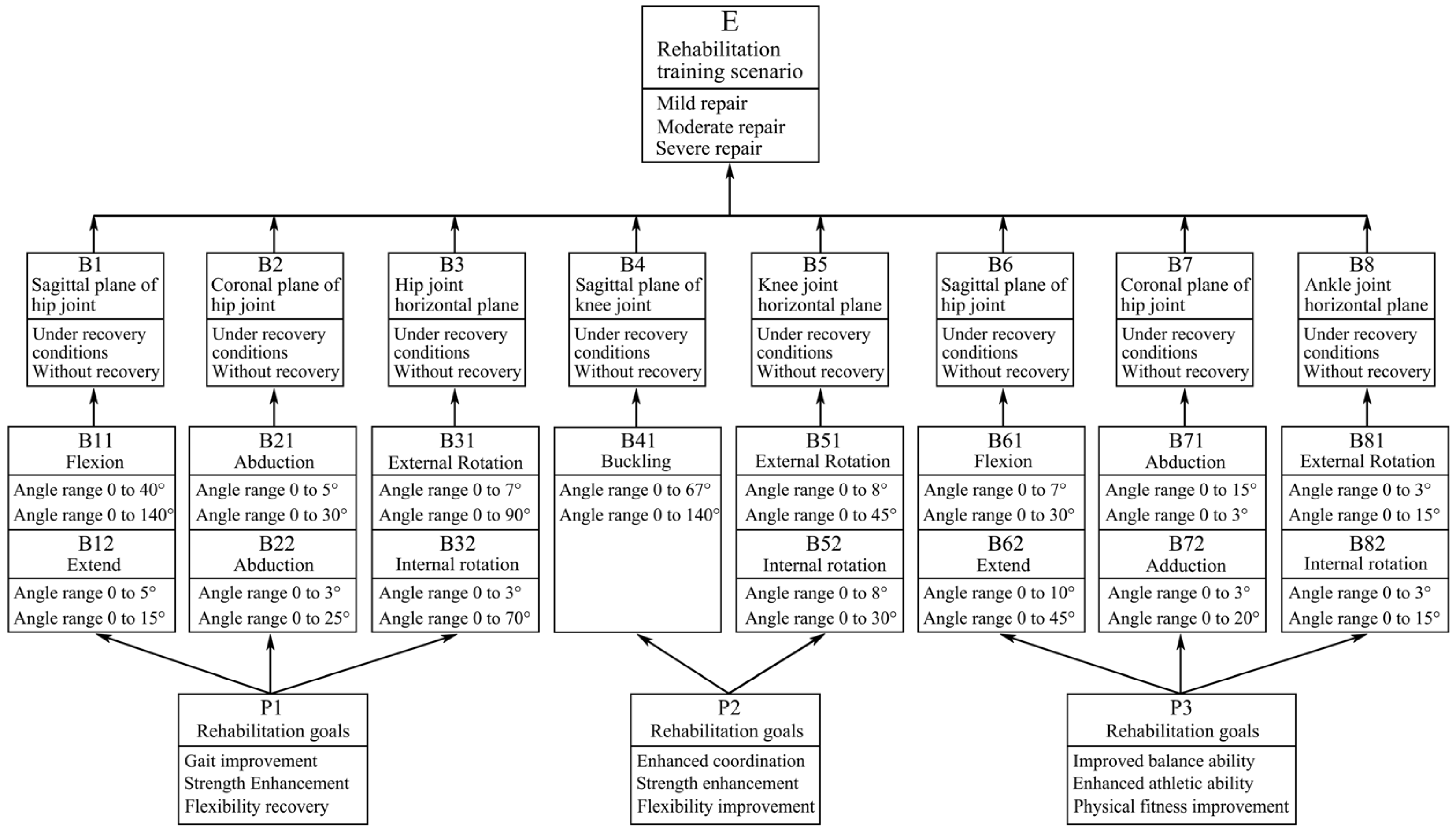
3.1. Construction of Bayesian Network Structural Model
3.2. Bayesian Network Computation and Analysis
4. Design and Evaluation of a Multidimensional Gait Lower Limb Rehabilitation Trainer
4.1. Design Considerations for Reducing Fatigue in Gait Rehabilitation Devices
4.1.1. Analyzing Design Requirements for Fatigue Prevention
4.1.2. Overall Analysis of the Lower Limbs
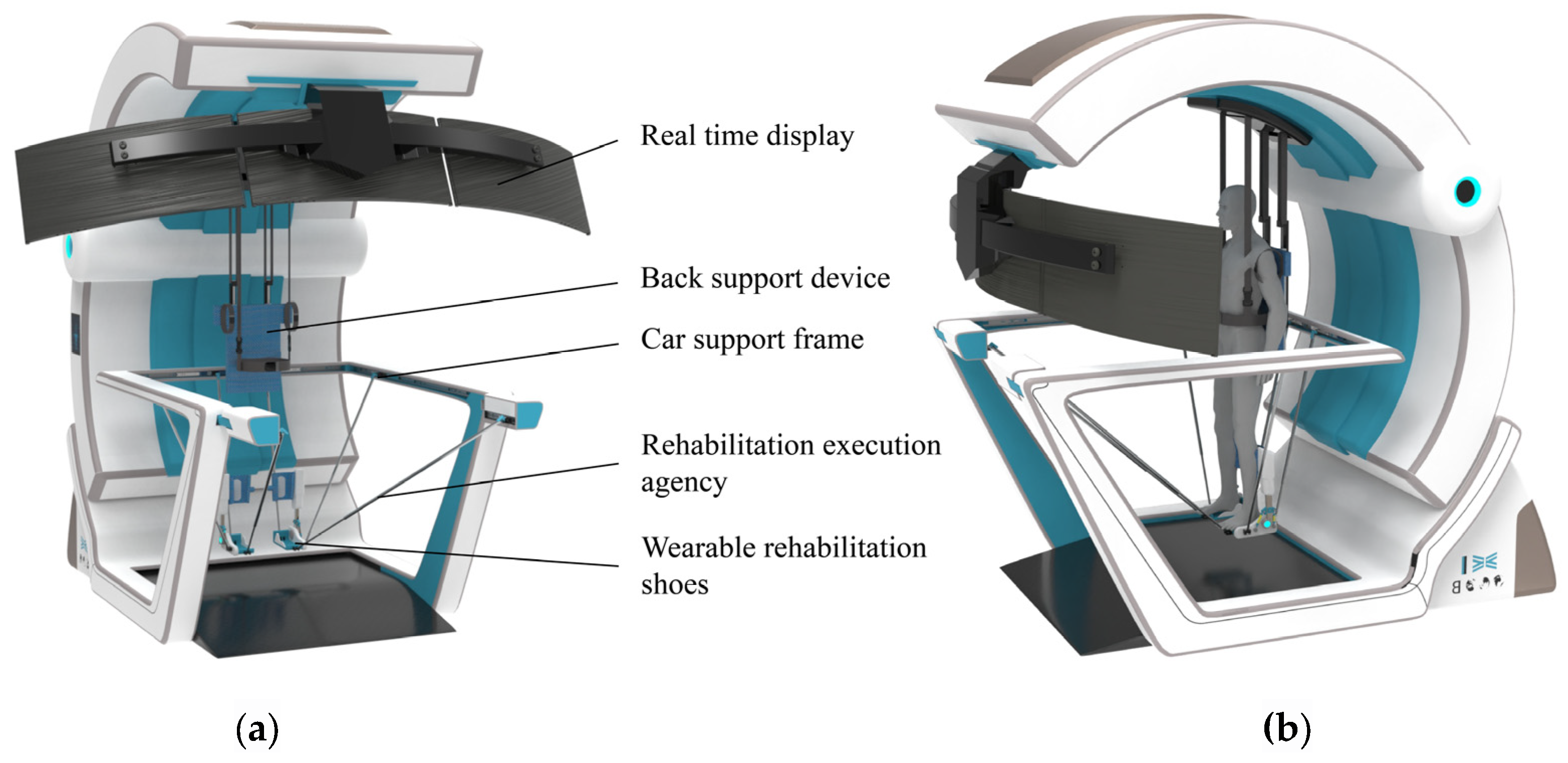
4.2. Equipment Design of the Multidimensional Gait Lower Limb Rehabilitation Training Device
Design of the Lumbar and Back Rehabilitation Structure
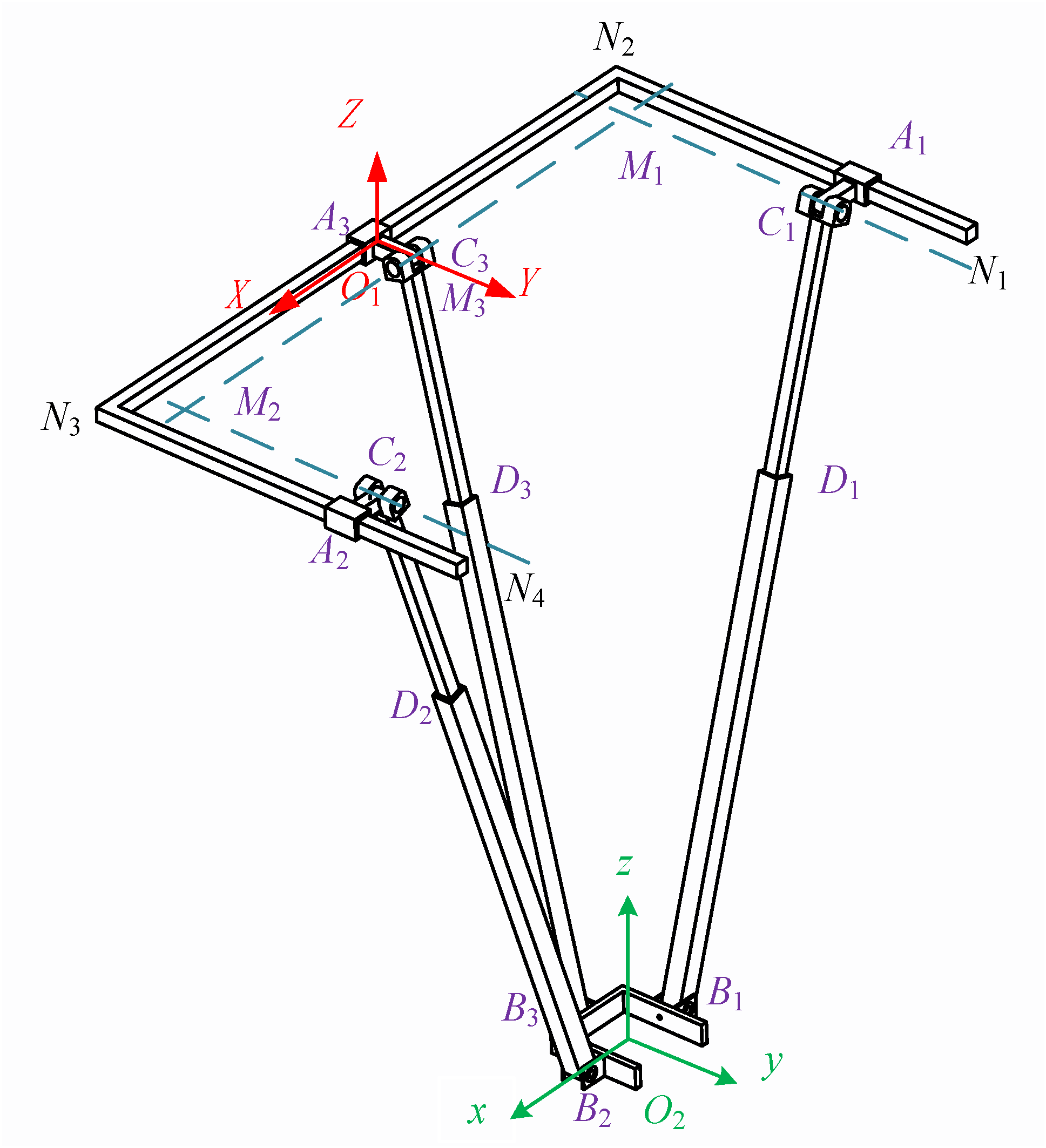
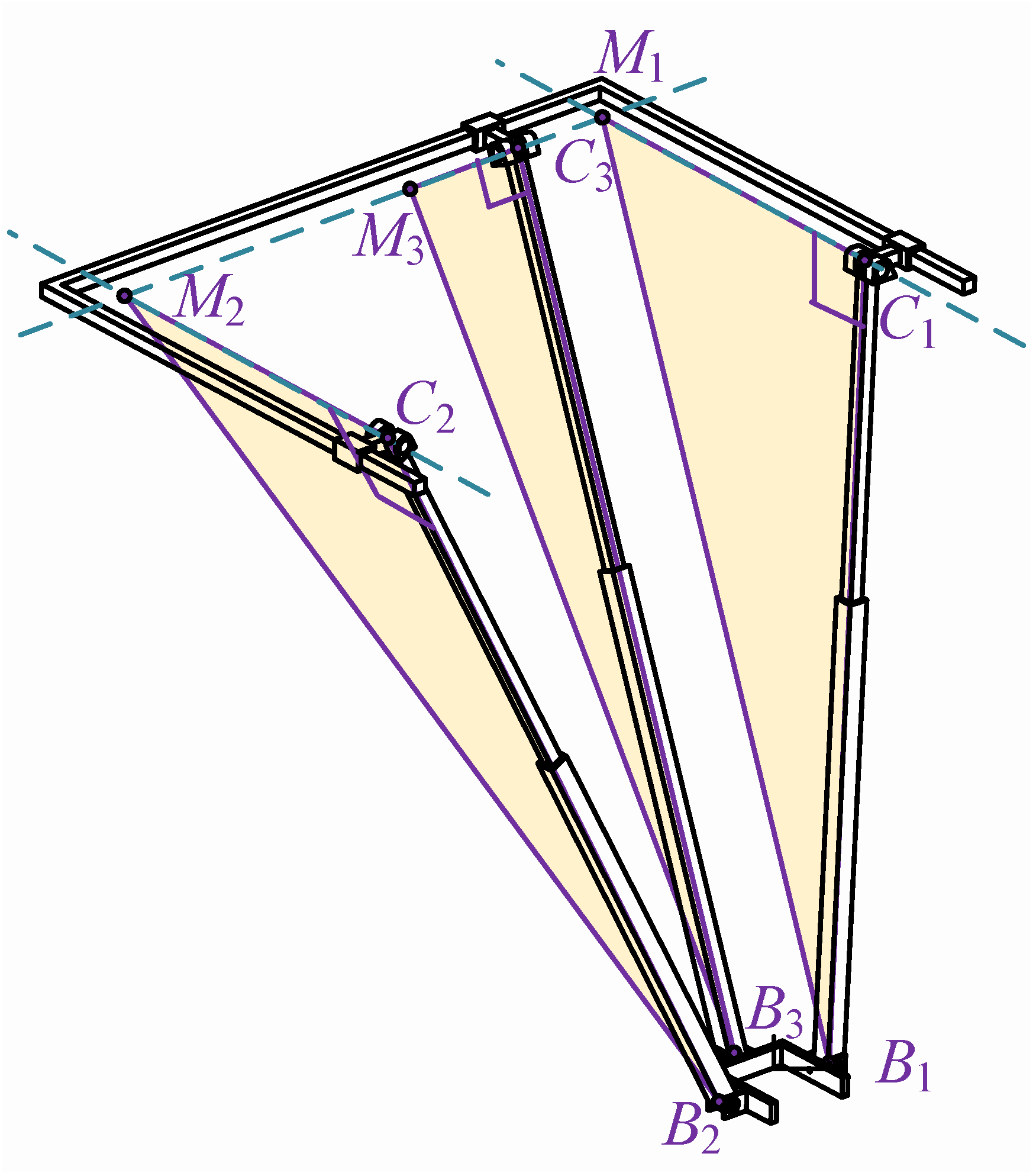
5. Kinematic Analysis of the Rehabilitation Actuator
Inverse Kinematics of the Rehabilitation Mechanism
6. Conclusions
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khan, N.A.; Hussain, S.; Spratford, W.; Goecke, R.; Kotecha, K.; Jamwal, P.K. Deep Learning-Driven Analysis of a Six-Bar Mechanism for Personalized Gait Rehabilitation. J. Comput. Inf. Sci. Eng. 2025, 25, 011001. [Google Scholar] [CrossRef]
- Kapsalyamov, A.; Brown, N.A.T.; Goecke, R.; Jamwal, P.K.; Hussain, S. Velocity Control of a Stephenson III Six-Bar Linkage-Based Gait Rehabilitation Robot Using Deep Reinforcement Learning. Neural Comput. Appl. 2025, 37, 5671–5682. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef]
- Zhang, X.; Yue, Z.; Wang, J. Robotics in Lower-Limb Rehabilitation after Stroke. Behav. Neurol. 2017, 2017, 3731802. [Google Scholar] [CrossRef]
- Torun, H.M.; Swaminathan, M.; Kavungal Davis, A.; Bellaredj, M.L.F. A Global Bayesian Optimization Algorithm and Its Application to Integrated System Design. IEEE Trans. VLSI Syst. 2018, 26, 792–802. [Google Scholar] [CrossRef]
- Bensi, M.; Kiureghian, A.D.; Straub, D. Efficient Bayesian Network Modeling of Systems. Reliab. Eng. Syst. Saf. 2013, 112, 200–213. [Google Scholar] [CrossRef]
- Freedman, H.; Metzger, J.; Abolhassani, N.; Tudor, A.; Tomlinson, B.; Paul, S. A Bayesian Approach to Constructing Probabilistic Models from Knowledge Graphs. Int. J. Semant. Comput. 2024, 18, 25–49. [Google Scholar] [CrossRef]
- Ziegler Haselein, B.; Da Silva, J.C.; Hooey, B.L. Multiple Machine Learning Modeling on near Mid-Air Collisions: An Approach towards Probabilistic Reasoning. Reliab. Eng. Syst. Saf. 2024, 244, 109915. [Google Scholar] [CrossRef]
- Yu, C.; Liu, J.; Nemati, S.; Yin, G. Reinforcement Learning in Healthcare: A Survey. ACM Comput. Surv. 2023, 55, 1–36. [Google Scholar] [CrossRef]
- Shen, T.; Zhang, M.; Wu, T. Emotion-Driven Action Interaction Design in Small Quadruped Robots: Leveraging NXEIK Multilevel Network. J. Eng. Des. 2024, 35, 159–194. [Google Scholar] [CrossRef]
- Hunte, J.L.; Neil, M.; Fenton, N.E. A Hybrid Bayesian Network for Medical Device Risk Assessment and Management. Reliab. Eng. Syst. Saf. 2024, 241, 109630. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Y.; Li, Z. A Novel Bayesian Pay-As-You-Drive Insurance Model with Risk Prediction and Causal Mapping. Decis. Anal. J. 2024, 13, 100522. [Google Scholar] [CrossRef]
- Vieider, F.M. Decisions Under Uncertainty as Bayesian Inference on Choice Options. Manag. Sci. 2024, 70, 9014–9030. [Google Scholar] [CrossRef]
- Philip, B.; AlJassmi, H. A Bayesian Decision Support System for Optimizing Pavement Management Programs. Heliyon 2024, 10, e25625. [Google Scholar] [CrossRef] [PubMed]
- Mitake, Y.; Inagaki, Y.; Tsuji, S.; Shimomura, Y. Identification of the Causal Relationship between Features and Barriers of Product–Service Systems Based on Bayesian Network Model. Procedia CIRP 2024, 122, 259–264. [Google Scholar] [CrossRef]
- Guo, J.; Ma, K. Risk Analysis for Hazardous Chemical Vehicle-Bridge Transportation System: A Dynamic Bayesian Network Model Incorporating Vehicle Dynamics. Reliab. Eng. Syst. Saf. 2024, 242, 109732. [Google Scholar] [CrossRef]
- Li, G.; Liu, Z.; Zhang, J.; Han, H.; Shu, Z. Bayesian Model Averaging by Combining Deep Learning Models to Improve Lake Water Level Prediction. Sci. Total Environ. 2024, 906, 167718. [Google Scholar] [CrossRef] [PubMed]
- Laborda, J.D.; Torrijos, P.; Puerta, J.M.; Gámez, J.A. Parallel Structural Learning of Bayesian Networks: Iterative Divide and Conquer Algorithm Based on Structural Fusion. Knowl.-Based Syst. 2024, 296, 111840. [Google Scholar] [CrossRef]
- Xu, W.; Futrell, R. A Hierarchical Bayesian Model for Syntactic Priming. arXiv 2024, arXiv:2405.15964. [Google Scholar]
- Gao, S.; Chen, J.; Chen, X.; Uchitel, J.; Tang, C.; Li, C.; Pan, Y.; Zhao, H. Temporal Dynamics and Physical Priori Multimodal Network for Rehabilitation Physical Training Evaluation. IEEE J. Biomed. Health Inform. 2024, 28, 5613–5623. [Google Scholar] [CrossRef]
- Sun, J.; Hu, F.; Gao, K.; Gao, F.; Ma, C.; Wang, J. Research and Experiment on Active Training of Lower Limb Based on Five-Bar Mechanism of Man-Machine Integration System. Robotica 2024, 42, 1453–1475. [Google Scholar] [CrossRef]
- Jin, W.; Liu, J.; Zhang, Q.; Zhang, X.; Wang, Q.; Xu, J.; Fang, H. Forward Dynamics Simulation of a Simplified Neuromuscular-Skeletal-Exoskeletal Model Based on the CMA-ES Optimization Algorithm: Framework and Case Studies. Multibody Syst. Dyn. 2024, 62, 525–558. [Google Scholar] [CrossRef]
- Qazi, A.; Simsekler, M.C.E.; Al-Mhdawi, M.K.S. Bayesian Network and Structural Equation Modeling of Dependencies between Country-Level Sustainability Risks and Logistics Performance. Ann. Oper. Res. 2024, 1–28. [Google Scholar] [CrossRef]
- Herlambang Cahya Pratama, Y.; Al Hafidz, M.; Lazuardy, N.; Naristi, K. Application Of User Centered Design (Ucd) Method For Ui/Ux Design At Husqy Petshop. MSJ 2024, 2, 62–70. [Google Scholar] [CrossRef]
- Hasim, W.; Wibirama, S.; Nugroho, H.A. Redesign of E-Participation Using User-Centered Design Approach for Improving User Experience. In Proceedings of the 2019 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 July 2019; pp. 857–861. [Google Scholar]
- Lowe, B.D.; Dempsey, P.G.; Jones, E.M. Ergonomics Assessment Methods Used by Ergonomics Professionals. Appl. Ergon. 2019, 81, 102882. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Gao, X.; Gao, R.; Dai, F.; Peng, J. A Novel Activity Recognition System for Alternative Control Strategies of a Lower Limb Rehabilitation Robot. Appl. Sci. 2019, 9, 3986. [Google Scholar] [CrossRef]
- Hernández-Ramírez, R. On the Origins and Basic Aspects of User-Centered Design and User Experience. In Emotional Design in Human-Robot Interaction; Ayanoğlu, H., Duarte, E., Eds.; Human–Computer Interaction Series; Springer International Publishing: Cham, Switzerland, 2019; pp. 71–92. ISBN 978-3-319-96721-9. [Google Scholar]
- Maguire, M. A Study of Student Creative Thinking in User-Centred Design. In Design, User Experience, and Usability: UX Research and Design; Soares, M.M., Rosenzweig, E., Marcus, A., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 12779, pp. 556–566. ISBN 978-3-030-78220-7. [Google Scholar]
- Graham, A.K.; Wildes, J.E.; Reddy, M.; Munson, S.A.; Barr Taylor, C.; Mohr, D.C. User-centered Design for Technology-enabled Services for Eating Disorders. Intl. J. Eat. Disord. 2019, 52, 1095–1107. [Google Scholar] [CrossRef]
- Carmo, A.A.; Kleiner, A.F.R.; Costa, P.H.L.D.; Barros, R.M.L. Three-Dimensional Kinematic Analysis of Upper and Lower Limb Motion during Gait of Post-Stroke Patients. Braz. J. Med. Biol. Res. 2012, 45, 537–545. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B11 Flexion (Hip) | B12 Extension (Hip) | B21 Abduction (Hip) | B22 Adduction (Hip) | B31 External Rotation (Hip) | B32 Internal Rotation (Hip) | P1 Rehabilitation Goal (Hip) | ||
|---|---|---|---|---|---|---|---|---|
| Gait Improvement | Strength Enhancement | Flexibility Restoration | ||||||
| State0 | State0 | State0 | State0 | State0 | State0 | 0.6 | 0.25 | 0.15 |
| State1 | 0.18 | 0.35 | 0.47 | |||||
| State1 | State0 | 0.56 | 0.23 | 0.21 | ||||
| State1 | 0.2 | 0.57 | 0.23 | |||||
| State1 | State0 | State0 | 0.72 | 0.14 | 0.14 | |||
| State1 | 0.22 | 0.46 | 0.32 | |||||
| State1 | State0 | 0.57 | 0.25 | 0.18 | ||||
| State1 | 0.22 | 0.62 | 0.16 | |||||
| State1 | State0 | State0 | State0 | 0.6 | 0.25 | 0.15 | ||
| State1 | 0.14 | 0.59 | 0.27 | |||||
| State1 | State0 | 0.48 | 0.39 | 0.13 | ||||
| State1 | 0.25 | 0.45 | 0.3 | |||||
| State1 | State0 | State0 | 0.64 | 0.21 | 0.15 | |||
| State1 | 0.21 | 0.64 | 0.15 | |||||
| State1 | State0 | 0.37 | 0.32 | 0.31 | ||||
| State1 | 0.15 | 0.75 | 0.1 | |||||
| State1 | State0 | State0 | State0 | State0 | 0.82 | 0.12 | 0.06 | |
| State1 | 0.27 | 0.65 | 0.08 | |||||
| State1 | State0 | 0.55 | 0.23 | 0.22 | ||||
| State1 | 0.24 | 0.58 | 0.18 | |||||
| State1 | State0 | State0 | 0.33 | 0.33 | 0.34 | |||
| State1 | 0.27 | 0.23 | 0.5 | |||||
| State1 | State0 | 0.31 | 0.34 | 0.35 | ||||
| State1 | 0.48 | 0.5 | 0.02 | |||||
| State1 | State0 | State0 | State0 | 0.37 | 0.26 | 0.37 | ||
| State1 | 0.11 | 0.14 | 0.75 | |||||
| State1 | State0 | 0.41 | 0.27 | 0.32 | ||||
| State1 | 0.05 | 0.5 | 0.45 | |||||
| State1 | State0 | State0 | 0.27 | 0.36 | 0.37 | |||
| State1 | 0.05 | 0.82 | 0.13 | |||||
| State1 | State0 | 0.41 | 0.41 | 0.18 | ||||
| State1 | 0.25 | 0.69 | 0.06 | |||||
| State1 | State0 | State0 | State0 | State0 | State0 | 0.26 | 0.35 | 0.39 |
| State1 | 0.41 | 0.27 | 0.32 | |||||
| State1 | State0 | 0.19 | 0.53 | 0.28 | ||||
| State1 | 0.4 | 0.4 | 0.2 | |||||
| State1 | State0 | State0 | 0.44 | 0.28 | 0.28 | |||
| State1 | 0.3 | 0.43 | 0.27 | |||||
| State1 | State0 | 0.29 | 0.3 | 0.41 | ||||
| State1 | 0.1 | 0.63 | 0.27 | |||||
| State1 | State0 | State0 | State0 | 0.49 | 0.1 | 0.41 | ||
| State1 | 0.25 | 0.45 | 0.3 | |||||
| State1 | State0 | 0.34 | 0.28 | 0.38 | ||||
| State1 | 0.35 | 0.35 | 0.3 | |||||
| State1 | State0 | State0 | 0.24 | 0.38 | 0.38 | |||
| State1 | 0.12 | 0.45 | 0.43 | |||||
| State1 | State0 | 0.3 | 0.68 | 0.02 | ||||
| State1 | 0.2 | 0.25 | 0.55 | |||||
| State1 | State0 | State0 | State0 | State0 | 0.29 | 0.36 | 0.35 | |
| State1 | 0.41 | 0.39 | 0.2 | |||||
| State1 | State0 | 0.3 | 0.25 | 0.45 | ||||
| State1 | 0.09 | 0.5 | 0.41 | |||||
| State1 | State0 | State0 | 0.37 | 0.5 | 0.13 | |||
| State1 | 0.3 | 0.22 | 0.48 | |||||
| State1 | State0 | 0.72 | 0.14 | 0.14 | ||||
| State1 | 0.18 | 0.27 | 0.55 | |||||
| State1 | State0 | State0 | State0 | 0.27 | 0.37 | 0.36 | ||
| State1 | 0.06 | 0.81 | 0.13 | |||||
| State1 | State0 | 0.4 | 0.4 | 0.2 | ||||
| State1 | 0.25 | 0.69 | 0.06 | |||||
| State1 | State0 | State0 | 0.56 | 0.24 | 0.2 | |||
| State1 | 0.24 | 0.57 | 0.19 | |||||
| State1 | State0 | 0.64 | 0.21 | 0.15 | ||||
| State1 | 0.48 | 0.5 | 0.02 | |||||
| B41 Flexion (Knee) | B51 External Rotation (Knee) | B52 Internal Rotation (Knee) | P2 Rehabilitation Goals (Knee) | ||
|---|---|---|---|---|---|
| Enhanced Coordination | Increased Strength | Improved Flexibility | |||
| State0 | State0 | State0 | 0.51 | 0.26 | 0.23 |
| State1 | 0.27 | 0.55 | 0.18 | ||
| State1 | State0 | 0.47 | 0.35 | 0.18 | |
| State1 | 0.25 | 0.57 | 0.18 | ||
| State1 | State0 | State0 | 0.31 | 0.34 | 0.35 |
| State1 | 0.38 | 0.28 | 0.34 | ||
| State1 | State0 | 0.41 | 0.33 | 0.26 | |
| State1 | 0.29 | 0.37 | 0.34 | ||
| B61 Flexion (Ankle) | B62 Dorsiflexion (Ankle) | B71 Abduction (Ankle) | B72 Adduction (Ankle) | B81 External Rotation (Ankle) | B82 Internal Rotation (Ankle) | P3 Rehabilitation Goals (Ankle) | ||
|---|---|---|---|---|---|---|---|---|
| Improved Balance Ability | Enhanced Motor Ability | Increased Physical Fitness | ||||||
| State0 | State0 | State0 | State0 | State0 | State0 | 0.17 | 0.46 | 0.37 |
| State1 | 0.53 | 0.27 | 0.2 | |||||
| State1 | State0 | 0.27 | 0.3 | 0.43 | ||||
| State1 | 0.35 | 0.22 | 0.43 | |||||
| State1 | State0 | State0 | 0.2 | 0.69 | 0.11 | |||
| State1 | 0.2 | 0.31 | 0.49 | |||||
| State1 | State0 | 0.22 | 0.38 | 0.4 | ||||
| State1 | 0.58 | 0.3 | 0.12 | |||||
| State1 | State0 | State0 | State0 | 0.31 | 0.29 | 0.4 | ||
| State1 | 0.49 | 0.31 | 0.2 | |||||
| State1 | State0 | 0.2 | 0.4 | 0.4 | ||||
| State1 | 0.14 | 0.46 | 0.4 | |||||
| State1 | State0 | State0 | 0.29 | 0.15 | 0.56 | |||
| State1 | 0.11 | 0.69 | 0.2 | |||||
| State1 | State0 | 0.48 | 0.04 | 0.48 | ||||
| State1 | 0.33 | 0.37 | 0.3 | |||||
| State1 | State0 | State0 | State0 | State0 | 0.05 | 0.55 | 0.4 | |
| State1 | 0.85 | 0.14 | 0.01 | |||||
| State1 | State0 | 0.1 | 0.3 | 0.6 | ||||
| State1 | 0.3 | 0.35 | 0.35 | |||||
| State1 | State0 | State0 | 0.09 | 0.51 | 0.4 | |||
| State1 | 0.71 | 0.19 | 0.1 | |||||
| State1 | State0 | 0.2 | 0.3 | 0.5 | ||||
| State1 | 0.33 | 0.27 | 0.4 | |||||
| State1 | State0 | State0 | State0 | 0.66 | 0.24 | 0.1 | ||
| State1 | 0.2 | 0.3 | 0.5 | |||||
| State1 | State0 | 0.24 | 0.36 | 0.4 | ||||
| State1 | 0.56 | 0.34 | 0.1 | |||||
| State1 | State0 | State0 | 0.28 | 0.36 | 0.36 | |||
| State1 | 0.05 | 0.85 | 0.1 | |||||
| State1 | State0 | 0.44 | 0.1 | 0.46 | ||||
| State1 | 0.31 | 0.38 | 0.31 | |||||
| State1 | State0 | State0 | State0 | State0 | State0 | 0.4 | 0.45 | 0.15 |
| State1 | 0.3 | 0.2 | 0.5 | |||||
| State1 | State0 | 0.15 | 0.4 | 0.45 | ||||
| State1 | 0.29 | 0.7 | 0.01 | |||||
| State1 | State0 | State0 | 0.47 | 0.33 | 0.2 | |||
| State1 | 0.2 | 0.4 | 0.4 | |||||
| State1 | State0 | 0.16 | 0.44 | 0.4 | ||||
| State1 | 0.64 | 0.26 | 0.1 | |||||
| State1 | State0 | State0 | State0 | 0.2 | 0.3 | 0.5 | ||
| State1 | 0.41 | 0.27 | 0.32 | |||||
| State1 | State0 | 0.09 | 0.73 | 0.18 | ||||
| State1 | 0.5 | 0.48 | 0.02 | |||||
| State1 | State0 | State0 | 0.2 | 0.32 | 0.48 | |||
| State1 | 0.1 | 0.73 | 0.17 | |||||
| State1 | State0 | 0.48 | 0.11 | 0.41 | ||||
| State1 | 0.41 | 0.5 | 0.09 | |||||
| State1 | State0 | State0 | State0 | State0 | 0.15 | 0.3 | 0.55 | |
| State1 | 0.25 | 0.38 | 0.37 | |||||
| State1 | State0 | 0.55 | 0.32 | 0.13 | ||||
| State1 | 0.11 | 0.49 | 0.4 | |||||
| State1 | State0 | State0 | 0.2 | 0.3 | 0.5 | |||
| State1 | 0.08 | 0.52 | 0.4 | |||||
| State1 | State0 | 0.72 | 0.18 | 0.1 | ||||
| State1 | 0.2 | 0.3 | 0.5 | |||||
| State1 | State0 | State0 | State0 | 0.4 | 0.3 | 0.3 | ||
| State1 | 0.19 | 0.43 | 0.38 | |||||
| State1 | State0 | 0.22 | 0.58 | 0.2 | ||||
| State1 | 0.37 | 0.15 | 0.48 | |||||
| State1 | State0 | State0 | 0.27 | 0.2 | 0.53 | |||
| State1 | 0.32 | 0.3 | 0.38 | |||||
| State1 | State0 | 0.32 | 0.2 | 0.48 | ||||
| State1 | 0.41 | 0.25 | 0.34 | |||||
| Rehabilitation Training | Rehabilitation Goals (Hip) | Rehabilitation Goals (Knee) | Rehabilitation Goals (Ankle) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Improved Gait | Strength Enhancement | Flexibility Restoration | Flexibility Restoration | Increased Strength | Improved Flexibility | Improved Balance Ability | Enhanced Motor Ability | Increased Physical Fitness | |
| Minor Repair | 0.410 | 0.350 | 0.240 | 0.416 | 0.350 | 0.234 | 0.278 | 0.384 | 0.337 |
| Minor Repair | 0.399 | 0.357 | 0.244 | 0.415 | 0.348 | 0.236 | 0.288 | 0.377 | 0.334 |
| Major Repair | 0.357 | 0.380 | 0.262 | 0.374 | 0.382 | 0.244 | 0.312 | 0.364 | 0.325 |
| Serial Number | Description of Requirement | Importance (Average Value) |
|---|---|---|
| 01 | Effectively supports the lower limbs and reduces joint burden. | 4.8 |
| 02 | Able to alleviate muscle fatigue in the waist and back of the trainee. | 4.5 |
| 03 | The equipment is comfortable to wear and does not restrict normal breathing of the trainee. | 4.0 |
| 04 | Equipment design ensures comfort for prolonged use. | 4.2 |
| 05 | Adjustable sizing to accommodate the body shapes of different patients. | 4.1 |
| 06 | Material is breathable and skin-friendly, reducing skin irritation. | 3.7 |
| 07 | The device is lightweight, facilitating easy wearing and movement for patients. | 3.9 |
| 08 | Operation is simple and intuitive, making it easy for patients to use. | 4.3 |
| 09 | The equipment has sufficient stability to ensure training safety. | 4.6 |
| 10 | Good wearing stability to prevent slipping during training. | 4.4 |
| Joint Name | Movement Parameters | Physiological Range of Motion (ROM) | Normal Gait Range |
|---|---|---|---|
| Hip joint | Sagittal plane (flexion/extension) | 0–140/0–15 | 0–40/0–5 |
| Coronal plane (abduction/adduction) | 0–30/0–25 | 0–5/0–3 | |
| Horizontal plane (external rotation/internal rotation) | 0–90/070 | 0–7/0–3 | |
| Knee joint | Sagittal plane (flexion/extension) | 0–140/0 | 0–67/0 |
| Coronal plane (abduction/adduction) | -- | -- | |
| Horizontal plane (external rotation/internal rotation) | 0–45/0–30 | 0–8/0–8 | |
| Ankle joint | Sagittal plane (flexion/extension) | 0–30/0–45 | 0–7/0–10 |
| Coronal plane (abduction/adduction) | 0–15/0–20 | 0–3/0–3 | |
| Horizontal plane (external rotation/internal rotation) | 0–15/0–15 | 0–3/0–3 |
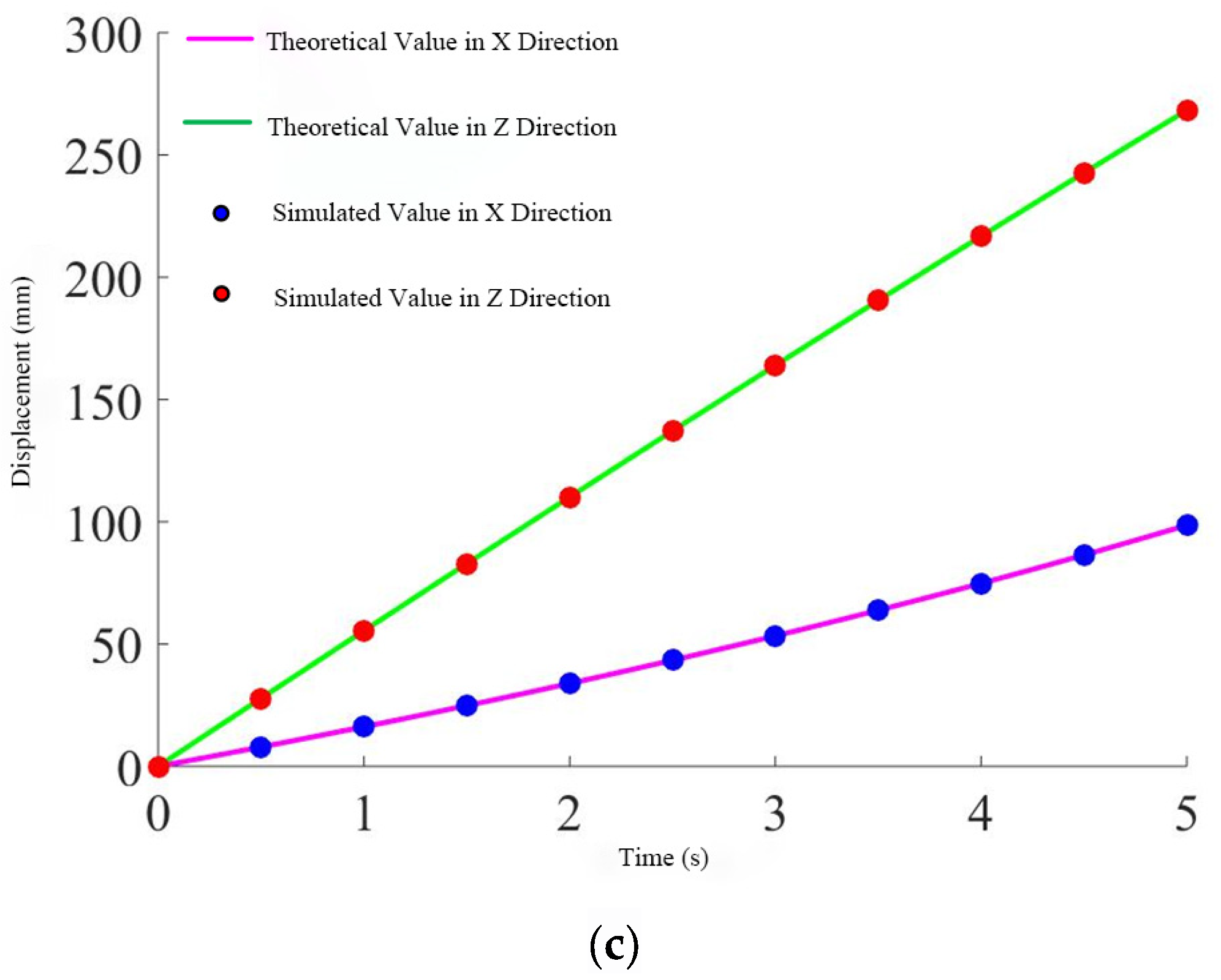
| Verification Position (mm) Px, Py, Pz | SolidWorks Model (mm) L1, L2, L3 | Theoretical Calculation (mm) L1, L2, L3 |
|---|---|---|
| 300, 400, −1000 200, 350, −900 −400, 450, −950 | 1187.26, 1000.80, 1028.39 1049.57, 910.82, 904.49 951.89, 1204.20, 950.05 | 1187.26, 1000.80, 1028.39 1049.57, 910.82, 904.49 951.89, 1204.20, 950.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, H.; Bao, Y.; Jia, C.; Chen, G.; Lan, J.; Shi, M.; Li, H.; Guo, Q.; Guan, L.; Li, S.; et al. Development of a Bayesian Network-Based Parallel Mechanism for Lower Limb Gait Rehabilitation. Biomimetics 2025, 10, 230. https://doi.org/10.3390/biomimetics10040230
Ma H, Bao Y, Jia C, Chen G, Lan J, Shi M, Li H, Guo Q, Guan L, Li S, et al. Development of a Bayesian Network-Based Parallel Mechanism for Lower Limb Gait Rehabilitation. Biomimetics. 2025; 10(4):230. https://doi.org/10.3390/biomimetics10040230
Chicago/Turabian StyleMa, Huiguo, Yuqi Bao, Chao Jia, Guoqiang Chen, Jingfu Lan, Mingxi Shi, He Li, Qihan Guo, Lei Guan, Shuang Li, and et al. 2025. "Development of a Bayesian Network-Based Parallel Mechanism for Lower Limb Gait Rehabilitation" Biomimetics 10, no. 4: 230. https://doi.org/10.3390/biomimetics10040230
APA StyleMa, H., Bao, Y., Jia, C., Chen, G., Lan, J., Shi, M., Li, H., Guo, Q., Guan, L., Li, S., & Zhang, P. (2025). Development of a Bayesian Network-Based Parallel Mechanism for Lower Limb Gait Rehabilitation. Biomimetics, 10(4), 230. https://doi.org/10.3390/biomimetics10040230