

Obstacle Avoidance Strategy and Path Planning of Medical Automated Guided Vehicles Based on the Bionic Characteristics of Antelope Migration

Abstract
1. Introduction
2. Selection of a Bionic Strategy Prototype and Algorithm
3. Prototype of the Bionic Strategy
- (1)
- Antelopes exhibit unique detour strategies during migration, enabling them to consider the types and distribution of obstacles, thereby guiding their decisions on future migration routes. The antelope circumvents fixed obstacles to find a new target point. These new target points are not only fixed points on the shortest path but also flexible and safe target points selected through circumnavigation thinking. This detour idea provides a kind of optimization and trade-off approach in path planning; we can evaluate the distance between different target points and assess whether the AGV can pass safely, thus enabling us to choose the most suitable path.
- (2)
- The antelope has a conical field of vision, with its eyes capable of observing nearly 300° ahead. This unique visual feature enables the antelope to effectively detect obstacles both ahead and to the side during migration. By leveraging this conical vision, the antelope can fully assess the width and openness of a feasible path, avoiding potential obstacles or safety risks by selecting a wider route.
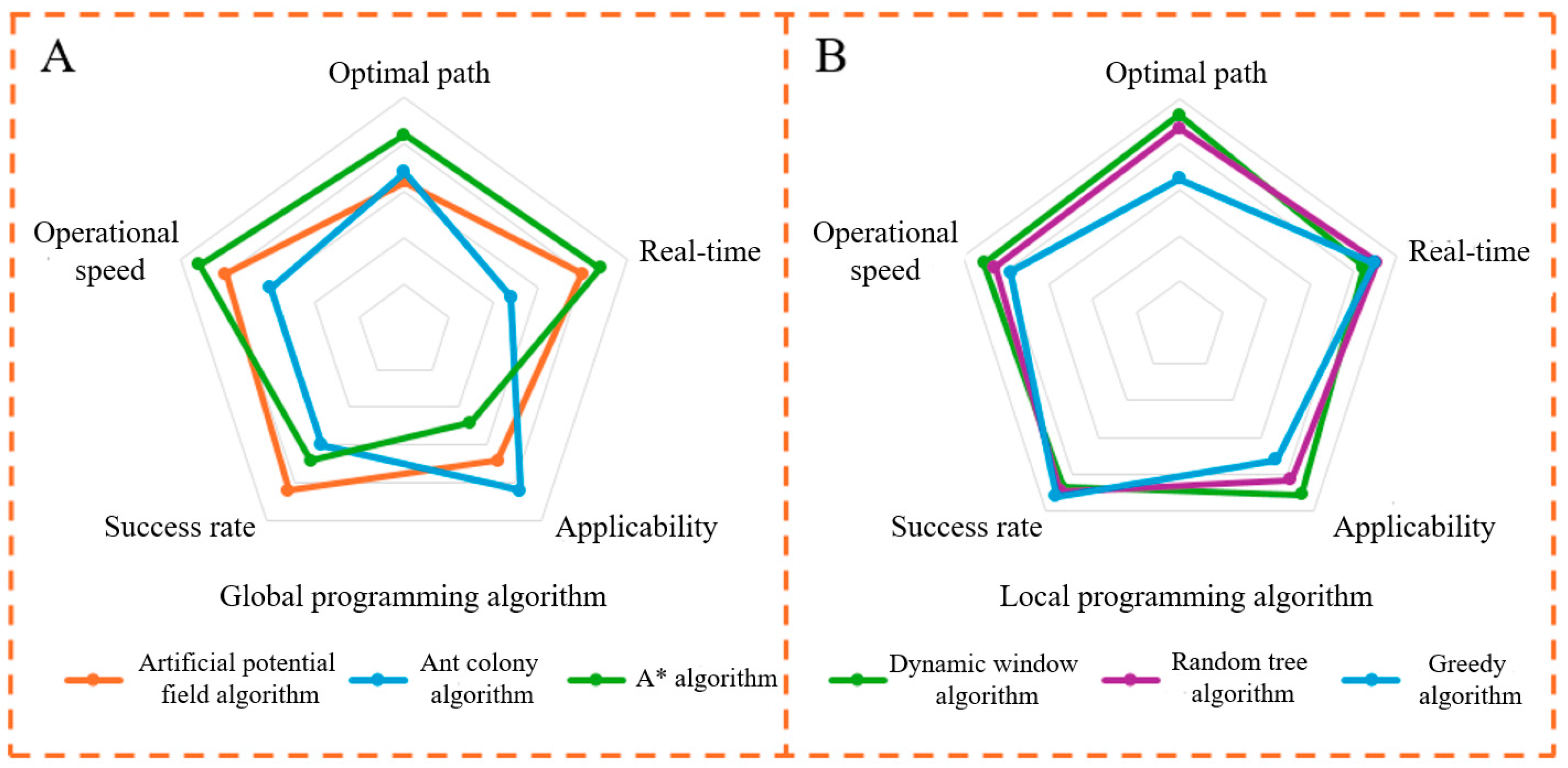
4. Selection of the Path Planning Algorithm
5. Algorithm Problems and Improvements
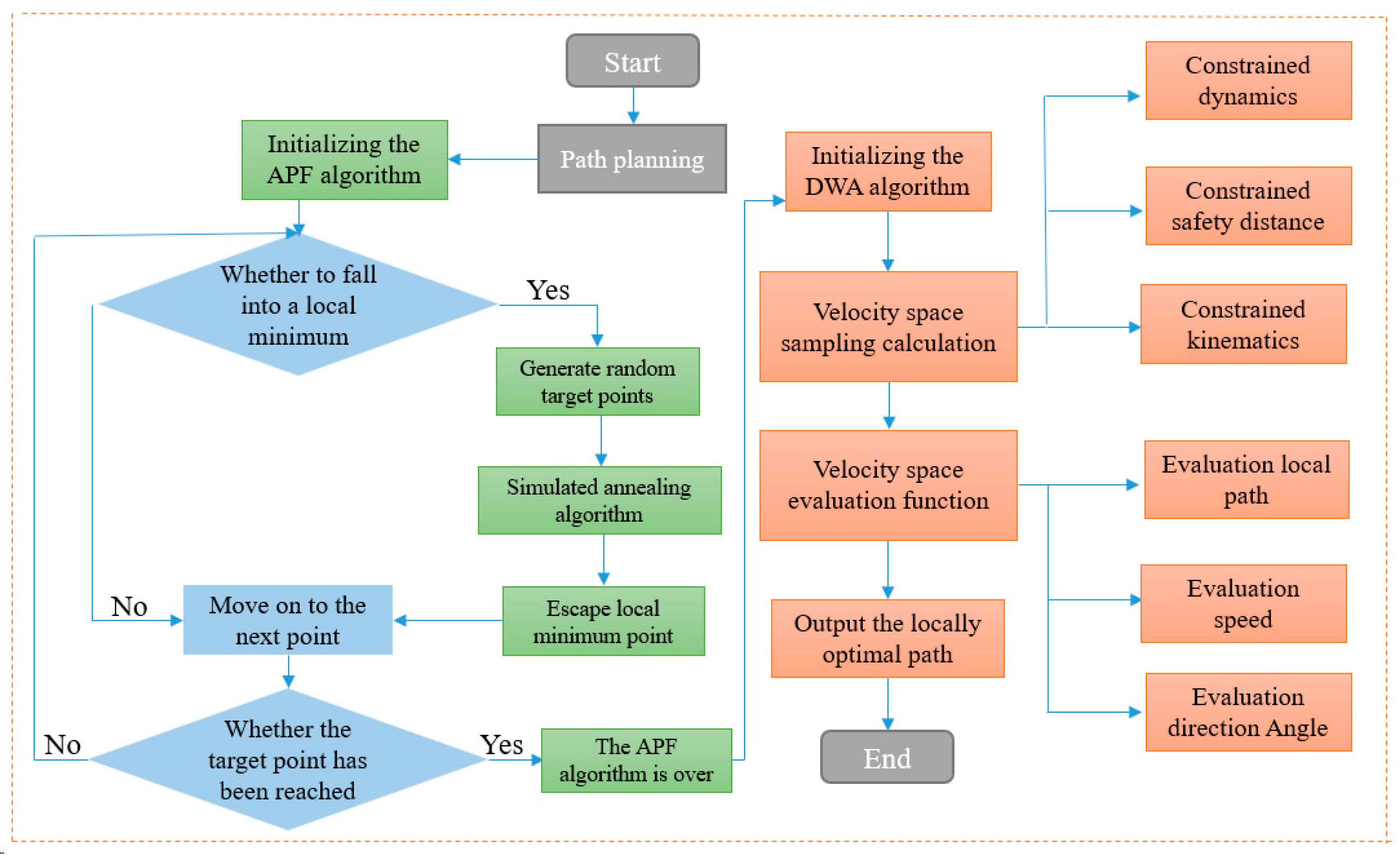
5.1. Artificial Potential Field Algorithm
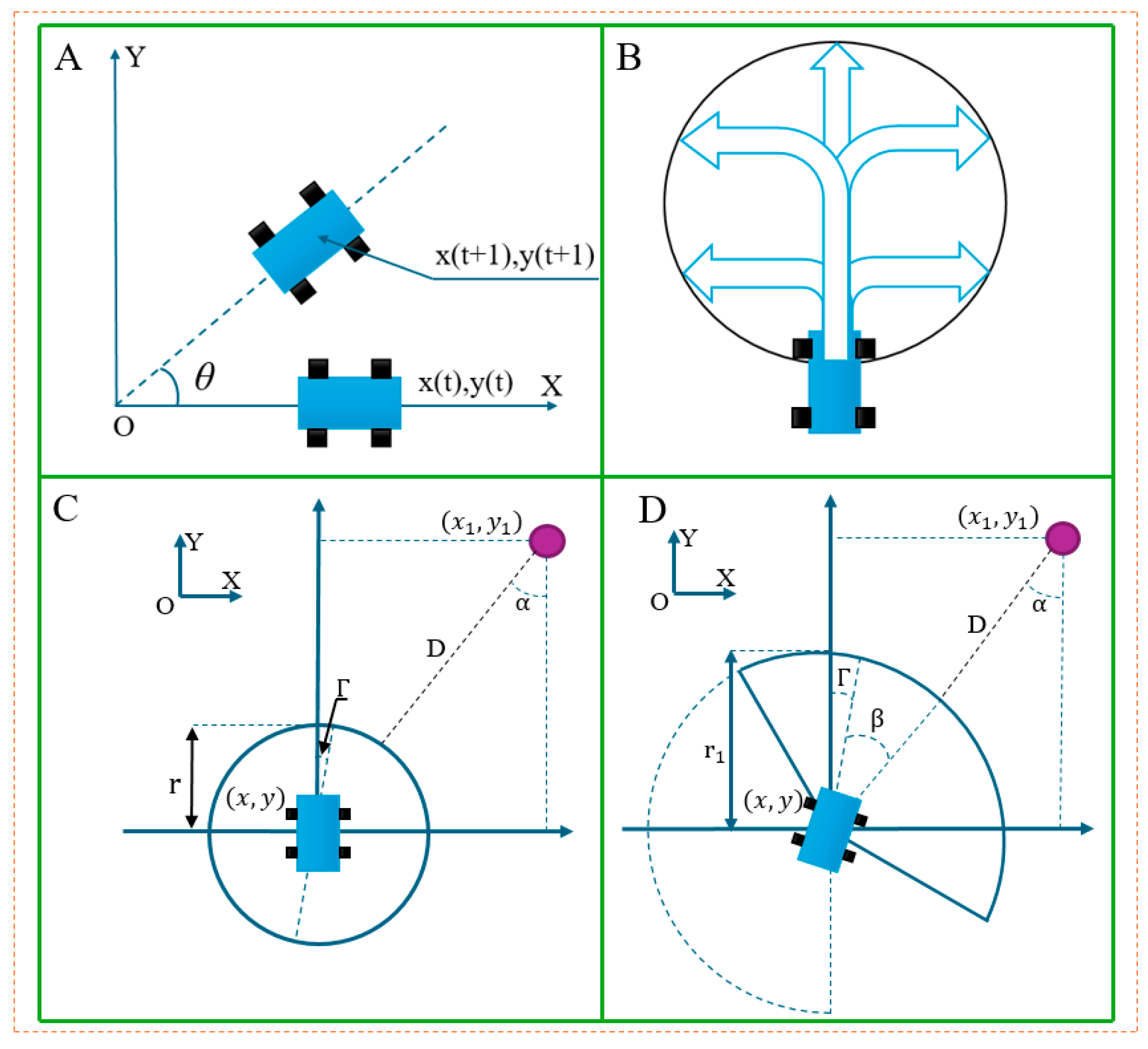
5.2. Dynamic Window Algorithm
6. Simulation Results and Data Processing
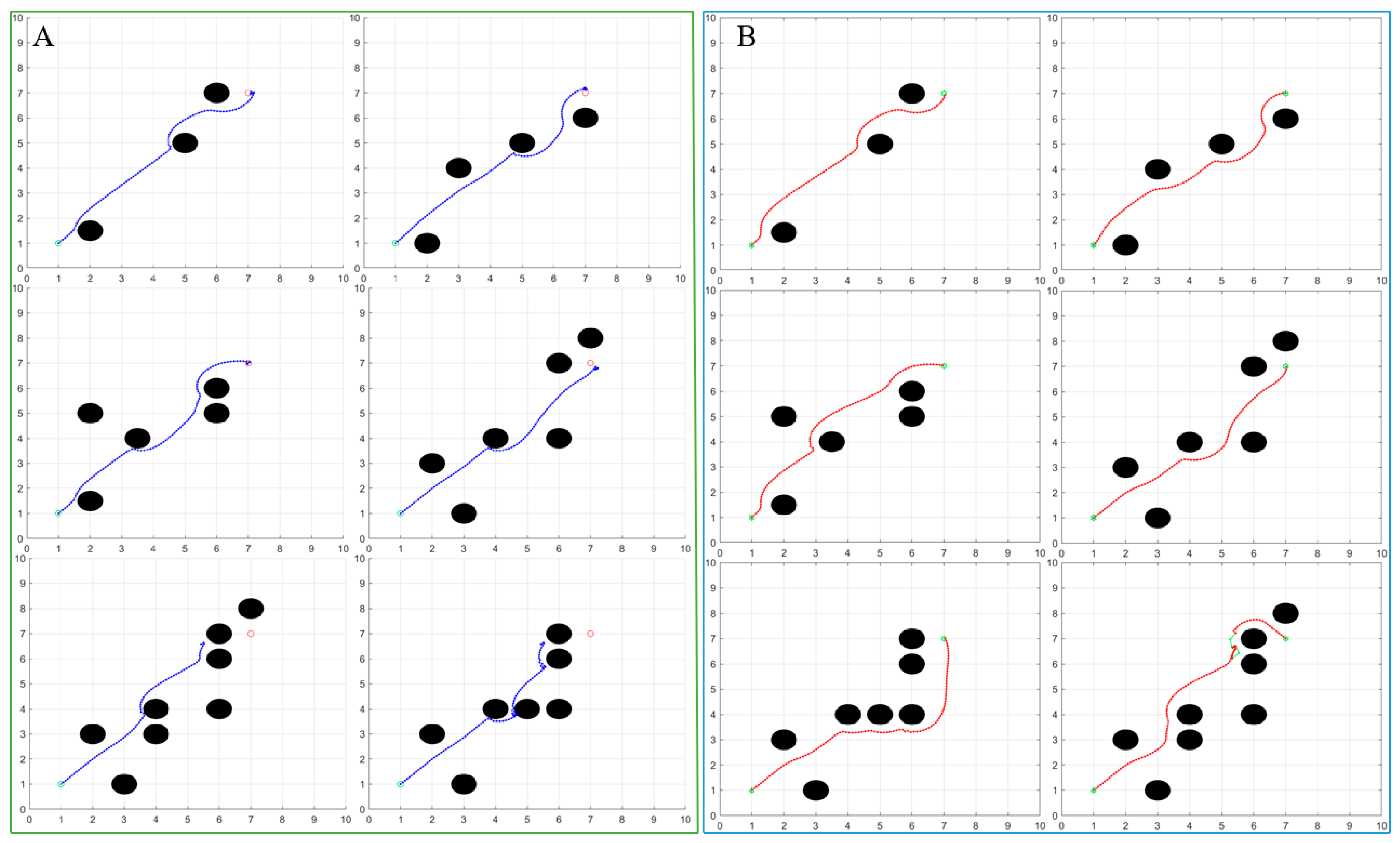
7. Artificial Potential Field Algorithm Simulation Experiment
8. Dynamic Window Algorithm Simulation Experiment
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, B.; Li, J.; Yang, S. An improved sliding mode approach for trajectory following control of nonholonomic mobile AGV. Sci. Rep. 2022, 12, 17763. [Google Scholar] [CrossRef] [PubMed]
- Heinemann, T.; Riedel, O.; Lechler, A. Generating Smooth Trajectories in Local Path Planning for Automated Guided Vehicles in Production. Sci. Direct Procedia Manuf. 2019, 39, 98–105. [Google Scholar] [CrossRef]
- Turaga, K.; Rao, A. Safety and efficacy of paediatric silicone Ahmed glaucoma valve (AGV) in adult eyes with post-VR surgery glaucoma. Eye 2019, 34, 1121–1128. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Liu, S.; Zhao, J. Autonomous port management based AGV path planning and optimization via an ensemble reinforcement learning framework. Ocean Coast. Manag. 2024, 251, 107087. [Google Scholar] [CrossRef]
- Fu, B.; Chen, L.; Zhou, Y. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Yu, W.; Lin, H.; Wang, Y. A ferrobotic system for automated microfluidic logistics. Sci. Robot. 2020, 5, eaba4411. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Zhang, L.; Song, L.; Wang, J. Obstacle avoidance path planning and simulation of garage AGV based on improved DWA. J. Syst. Simul. 2024, 36, 2265–2276. [Google Scholar] [CrossRef]
- Yoo, J.W.; Sim, E.S.; Cao, C.; Park, J.W. An algorithm for deadlock avoidance in an AGV System. Int. J. Adv. Manuf. Technol. 2005, 26, 659–668. [Google Scholar] [CrossRef]
- Zheng, K.; Tang, D.; Gu, W. Distributed control of multi-AGV system based on regional control model. Prod. Eng. Res. Dev. 2013, 7, 433–441. [Google Scholar] [CrossRef]
- Xiang, D.; Lin, H.; Ouyang, J. Combined improved A* and greedy algorithm for path planning of multi-objective mobile robot. Sci. Rep. 2022, 12, 13273. [Google Scholar] [CrossRef]
- Huo, F.; Zhu, S.; Dong, H. A new approach to smooth path planning of Ackerman mobile robot based on improved ACO algorithm and B-spline curve. Robot. Auton. Syst. 2024, 175, 104655. [Google Scholar] [CrossRef]
- Yang, C.; Pan, J.; Wei, K. A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents. J. Mar. Sci. Eng. 2024, 12, 285. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- Kang, M.; Chen, Q.; Fan, Z. A RRT based path planning scheme for multi-DOF robots in unstructured environments. Comput. Electron. Agric. 2024, 218, 108707. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.; Wang, L. A Path Planning System for Orchard Mower Based on Improved A* Algorithm. Agronomy 2024, 14, 391. [Google Scholar] [CrossRef]
- Zhang, W.; Ye, Z.; Wang, S. Research on the local path planning of an orchard mowing robot based on an elliptic repulsion scope boundary constraint potential field method. Front. Plant Sci. 2023, 14, 1184352. [Google Scholar] [CrossRef] [PubMed]
- Qin, P.; Liu, F.; Guo, Z. Hierarchical collision-free trajectory planning for autonomous vehicles based on improved artificial potential field method. Trans. Inst. Meas. Control 2024, 46, 799–812. [Google Scholar] [CrossRef]
- Zhang, R.; Guo, H.; Andriukaitis, D. Intelligent path planning by an improved RRT algorithm with dual grid map. Alex. Eng. J. 2024, 88, 91–104. [Google Scholar] [CrossRef]
- Zhao, J.; Deng, C.; Yu, H. Path planning of unmanned vehicles based on adaptive particle swarm optimization algorithm. Comput. Commun. 2024, 216, 112–129. [Google Scholar] [CrossRef]
- Jin, X.; Li, Z.; Ikiela, O.V.N. An Efficient Trajectory Planning Approach for Autonomous Ground Vehicles Using Improved Artificial Potential Field. Symmetry 2024, 16, 106. [Google Scholar] [CrossRef]
- Lee, H.; Moon, S.; Min, C. Path Planning Based on Artificial Potential Field with an Enhanced Virtual Hill Algorithm. Appl. Sci. 2024, 14, 8292. [Google Scholar] [CrossRef]
- Tao, B.; Kim, H.J. Mobile robot path planning based on bi-population particle swarm optimization with random perturbation strategy. J. King Saud Univ.-Comput. Inf. Sci. 2024, 36, 101974. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, Y.; Su, Y. Multi-Objective Reliable Optimization Dispatch of High-proportion Power System Based on Improved Particle Swarm Algorithm. J. Phys. Conf. Ser. 2024, 2890, 012028. [Google Scholar] [CrossRef]
- Liao, T.; Chen, F.; Wu, Y. Research on Path Planning with the Integration of Adaptive A-Star Algorithm and Improved Dynamic Window Approach. Electronics 2024, 13, 455. [Google Scholar] [CrossRef]
- Hou, J.; Jiang, W.; Luo, Z. Dynamic Path Planning for Mobile Robots by Integrating Improved Sparrow Search Algorithm and Dynamic Window Approach. Actuators 2024, 13, 24. [Google Scholar] [CrossRef]
- Hami, T.; Mohsen, S.; Samira, A. Path planning and optimal control of a 4WS vehicle using calculus of variations. Acta Mech. Sin. 2024, 40, 523217. [Google Scholar] [CrossRef]
- Zheng, K. Autonomous Obstacle Avoidance and Trajectory Planning for Mobile Robot Based on Dual-Loop Trajectory Tracking Control and Improved Artificial Potential Field Method. Actuators 2024, 13, 37. [Google Scholar] [CrossRef]
- Mai, X.; Li, D.; Ouyang, J. An improved dynamic window approach for local trajectory planning in the environment with dense objects. J. Phys. Conf. Ser. 2021, 1884, 012003. [Google Scholar] [CrossRef]
- Laiyi, Y.; Jing, B.; Haitao, F. Intelligent Path Planning for Mobile Robots Based on SAC Algorithm. J. Syst. Simul. 2023, 35, 1726–1736. [Google Scholar] [CrossRef]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Thorough robot navigation based on SVM local planning. Robot. Auton. Syst. 2015, 70, 166–180. [Google Scholar] [CrossRef]
- Cui, J.; Wu, L.; Huang, X. Multi-strategy adaptable ant colony optimization algorithm and its application in robot path planning. Knowl.-Based Syst. 2024, 288, 111459. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.; Wu, H. Mobile Robot Path Planning Based on Kinematically Constrained A-Star Algorithm and DWA Fusion Algorithm. Mathematics 2023, 11, 4552. [Google Scholar] [CrossRef]
- Jing, X.; Xiaokun, D. Path planning for UAV based on improved dynamic step RRT algorithm. J. Phys. Conf. Ser. 2021, 1983, 012034. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time Obstacle Avoidance System for Manipulators and Mobile Robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Suying, Z.; Yan, S.; Wen, C. Path Planning of mobile robot based on improved artificial potential field method. Microcomput. Inf. 2014, 154, 644–650. [Google Scholar] [CrossRef]
- Masoud, A.A. Decentralized Self-Organizing Potential Field-Based Control for Individually Motivated Mobile Agents in a Cluttered Environment: A Vector-Harmonic Potential Field Approach. IEEE transactions on systems, man, and cybernetics. Part A Syst. Hum. 2007, 37, 372–390. [Google Scholar] [CrossRef]
- Xiang, Y.; Chen, J.; Si, D. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method. J. Syst. Simul. 2024, 36, 3. [Google Scholar] [CrossRef]
- Wei, L.; Kun, Q.; Xiao, Y. COLREGS-based collision avoidance algorithm for unmanned surface vehicles using modified artificial potential fields. Phys. Commun. 2023, 57, 101980. [Google Scholar] [CrossRef]
- Qiang, X.; Jian, X.; Hai, H. Trajectory Optimization of Robotic Arm Based on Improved Simulated Annealing Genetic Algorithm. J. Syst. Simul. 2023, 1148. [Google Scholar] [CrossRef]
- Yan, L.; Ru, L.; Bo, S. Optimization of High Energy Efficiency for Self-Consistent Energy System in Highway Service Area via Simulated Annealing Algorithm-Genetic Algorithm. J. Xi’an JiaoTong Univ. 2024, 58, 019712. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameter | Magnitude |
|---|---|
| Gravitational gain coefficient (N/m) | 28 |
| Repulsion gain coefficient (N/m) | 15 |
| Obstacle evaluation radius (m) | 0.4 |
| AGV step length (m) | 0.1 |
| Global Path Planning | Success Rate | Average Path Length (m) | Time Required to Reach the Target (s) |
|---|---|---|---|
| Traditional APF | 66% | 10.284 | 3.59 s |
| Improved APF | 100% | 10.191 | 2.40 s |
| Main Parameter | Magnitude |
|---|---|
| Maximum speed (m/s) | 1 |
| Maximum rotation speed (rad/s) | 2 |
| Acceleration (m/s2) | 3 |
| Rotational acceleration (m/s2) | 4 |
| Speed resolution (rad/s) | 0.1 |
| Rotational speed resolution (rad/s) | 0.1 |
| Obstacle radius for conflict determination (m) | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Niu, J.; Zhang, B.; Gao, X.; Zhang, X.; Huang, S. Obstacle Avoidance Strategy and Path Planning of Medical Automated Guided Vehicles Based on the Bionic Characteristics of Antelope Migration. Biomimetics 2025, 10, 142. https://doi.org/10.3390/biomimetics10030142
Hu J, Niu J, Zhang B, Gao X, Zhang X, Huang S. Obstacle Avoidance Strategy and Path Planning of Medical Automated Guided Vehicles Based on the Bionic Characteristics of Antelope Migration. Biomimetics. 2025; 10(3):142. https://doi.org/10.3390/biomimetics10030142
Chicago/Turabian StyleHu, Jing, Junchao Niu, Bangcheng Zhang, Xiang Gao, Xinming Zhang, and Sa Huang. 2025. "Obstacle Avoidance Strategy and Path Planning of Medical Automated Guided Vehicles Based on the Bionic Characteristics of Antelope Migration" Biomimetics 10, no. 3: 142. https://doi.org/10.3390/biomimetics10030142
APA StyleHu, J., Niu, J., Zhang, B., Gao, X., Zhang, X., & Huang, S. (2025). Obstacle Avoidance Strategy and Path Planning of Medical Automated Guided Vehicles Based on the Bionic Characteristics of Antelope Migration. Biomimetics, 10(3), 142. https://doi.org/10.3390/biomimetics10030142