
Differences in Pedestrian Behavior at Crosswalk between Communicating with Conventional Vehicle and Automated Vehicle in Real Traffic Environment


Abstract
1. Introduction
2. Materials and Methods
2.1. Experiment Location and Period
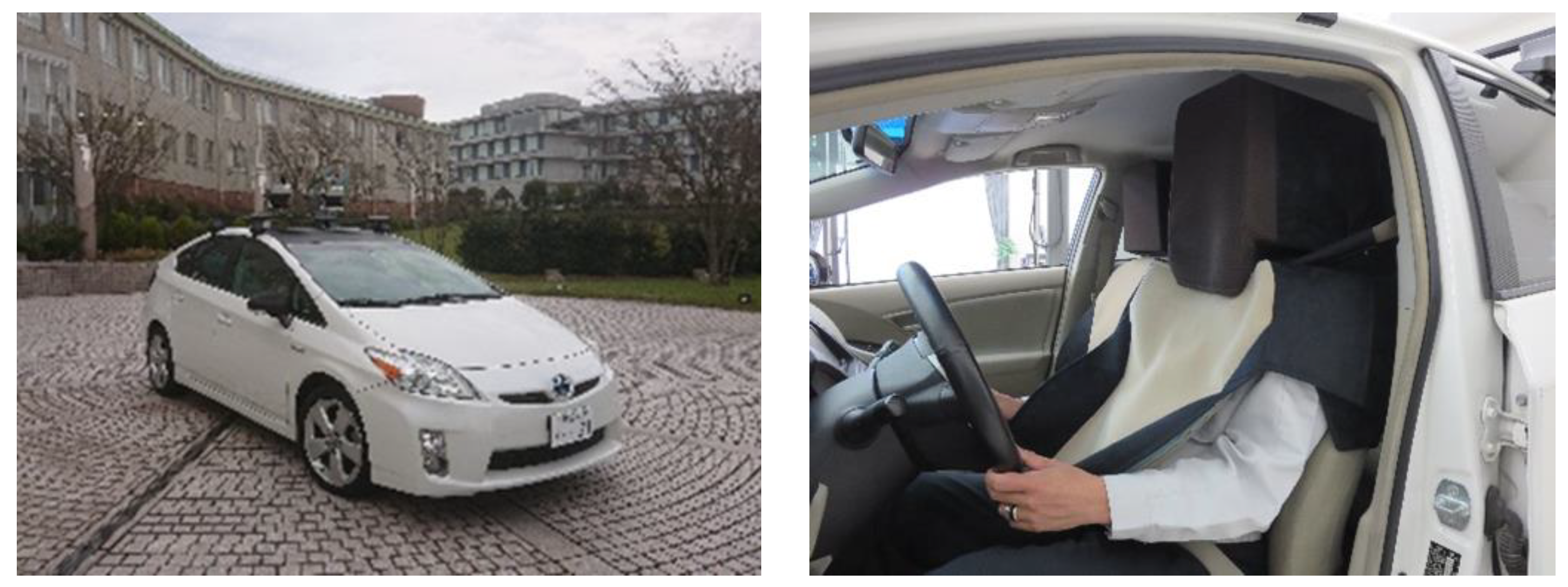
2.2. Vehicle and Devise
2.3. Positions of Pedestrian and Vehicle
2.4. Scenario
2.5. Procedure
- Participants were informed that the AV will not stop in front of the crosswalk in some cases.
- The vehicle (CV or AV) waited at a location 60 m from crosswalk.
- The participant stood in front of the crosswalk (pedestrian could not watch the vehicle start, because the instructor controlled the pedestrian’s body direction).
- The instructor instructed the participant to cross the road alone (each participant crossed the road once).
- Before the pedestrian crossed the road, the vehicle (CV or AV) approached the crosswalk at approximately 20 km/h and stopped in front of the crosswalk.
- The pedestrian communicated with vehicle (CV or AV) and then crossed the road (behavior was main communication tool by both pedestrians and vehicles).
- After the experiment, the participant provided answers to a questionnaire and an interview.
2.6. Questionnaire and Interview
2.7. Analysis
3. Results
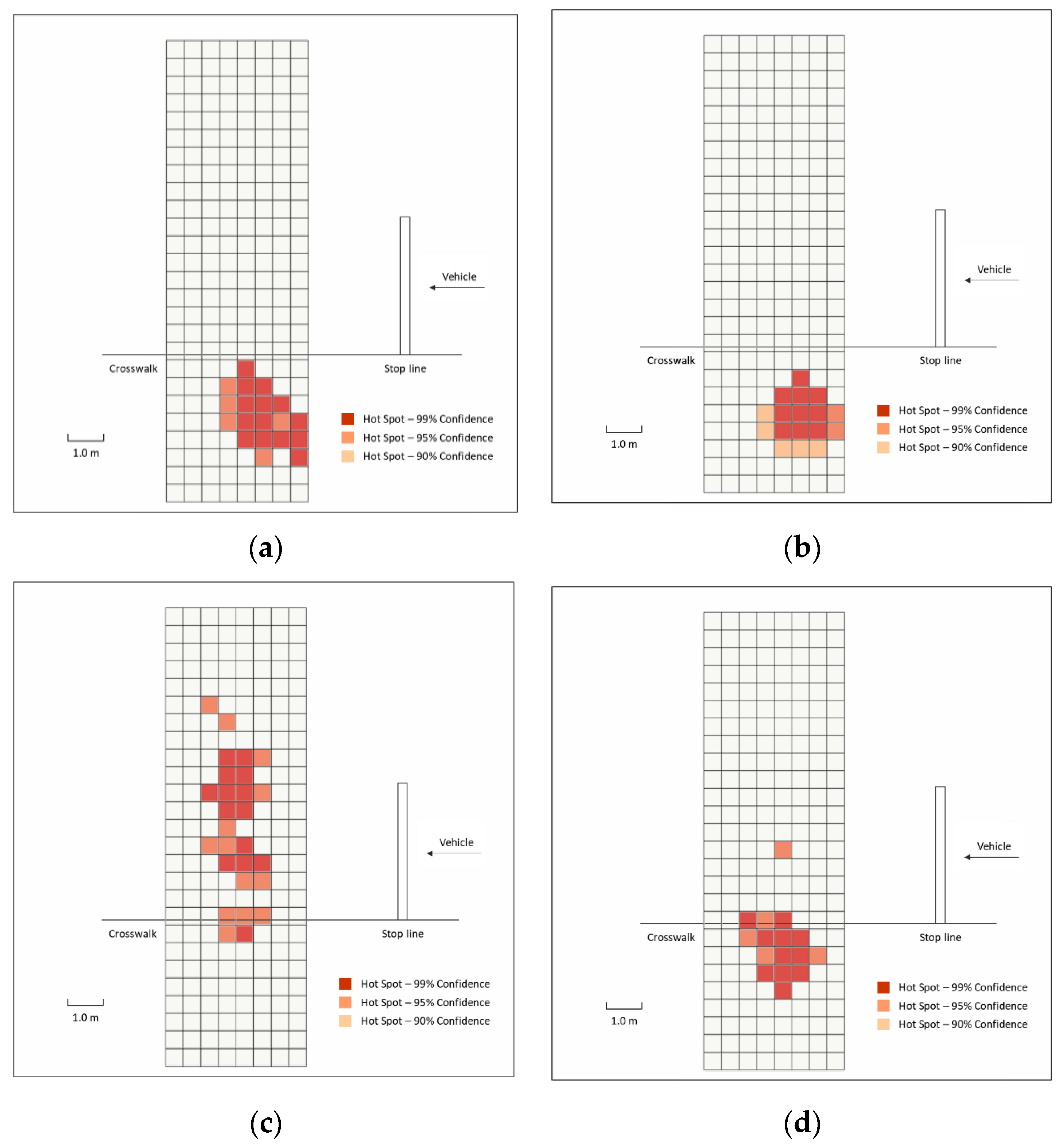
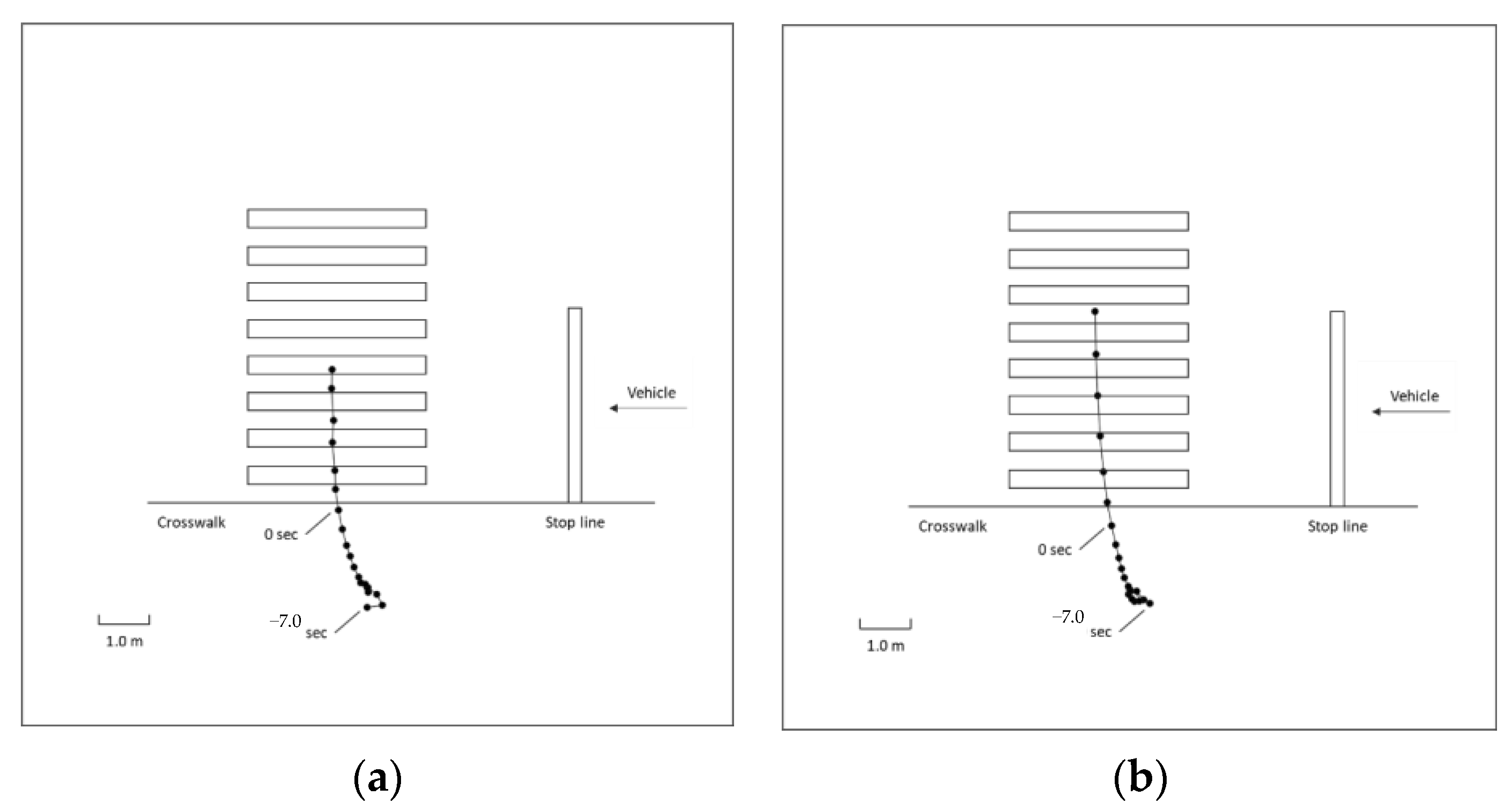
3.1. Effect of Vehicle Type (CV or AV) on Pedestrian Behavior
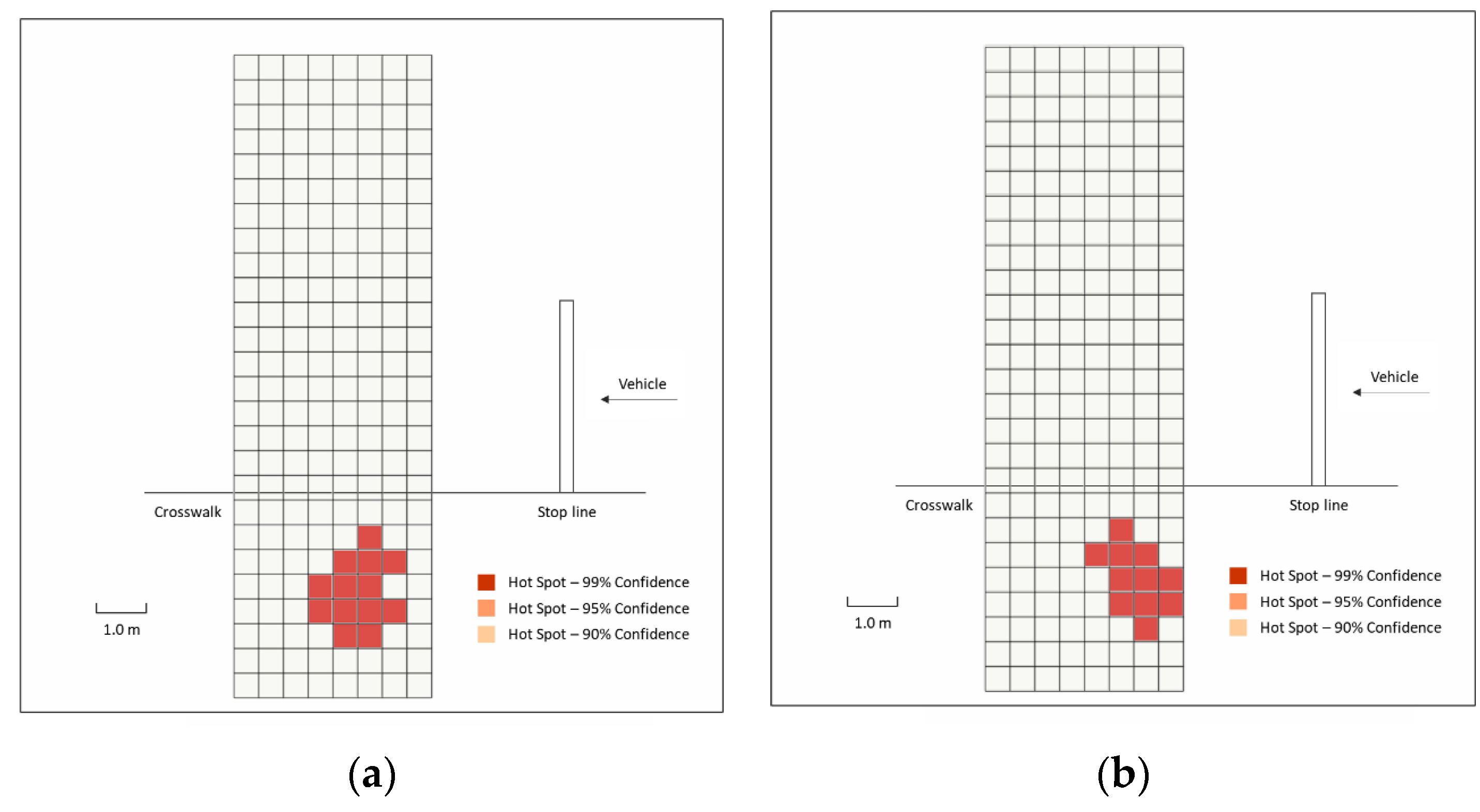
3.2. Effects of Perceived Safety on Pedestrian Behavior
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boggs, A.M.; Arvin, R.; Khattak, A.J. Exploring the who, what, when, where, and why of automated vehicle Disengagements. Accid. Anal. Prev. 2020, 136, 105406. [Google Scholar] [CrossRef] [PubMed]
- Sinha, A.; Chand, S.; Wijayaratna, K.P.; Virdi, N.; Dixit, V. Comprehensive safety assessment in mixed fleets with connected and automated vehicles: A crash severity and rate evaluation of conventional vehicles. Accid. Anal. Prev. 2020, 142, 105567. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zhong, H.; Ma, W.; Abdel-Aty, M.; Park, J. How many crashes can connected vehicle and automated vehicle technologies prevent: A meta-analysis. Accid. Anal. Prev. 2020, 136, 105299. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Li, G.; Chen, J.; Long, Y.; Chen, T.; Chen, L.; Xia, Q. The adaptability and challenges of autonomous vehicles to pedestrians in urban China. Accid. Anal. Prev. 2020, 145, 105692. [Google Scholar] [CrossRef] [PubMed]
- Petrović, Đ.; Mijailović, R.; Pešić, D. Traffic Accidents with Autonomous Vehicles: Type of Collisions, Manoeuvres and Errors of Conventional Vehicles’ Drivers. Transp. Res. Procedia 2020, 45, 161–168. [Google Scholar] [CrossRef]
- Habibovic, A.; Lundgren, V.M.; Andersson, J.; Klingegård, M.; Lagström, T.; Sirkka, A.; Fagerlönn, J.; Edgren, C.; Fredriksson, R.; Krupenia, S.; et al. Communicating intent of automated vehicles to pedestrians. Front. Psychol. 2018, 9, 1336. [Google Scholar] [CrossRef]
- Mirnig, N.; Perterer, N.; Stollnberger, G.; Tscheligi, M. Three strategies for autonomous car-to-pedestrian communication. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction-HRI’17, Vienna, Austria, 6–9 March 2017; pp. 209–210. [Google Scholar]
- Onishi, H. A survey: Why and how automated vehicles should communicate to other road-users. In Proceedings of the IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]
- Risto, M.; Emmenegger, C.; Vinkhuyzen, E.; Cefkin, M.; Hollan, J. Human-vehicle interfaces: The power of vehicle movement gestures in human road user coordination. In Proceedings of the Driving Assessment: The Ninth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Manchester Village, VT, USA, 26–29 June 2017; pp. 186–192. [Google Scholar]
- Schieben, A.; Wilbrink, M.; Kettwich, C.; Madigan, R.; Louw, T.; Merat, N. Designing the interaction of automated vehicles with other traffic participants: Design considerations based on human needs and expectations. Cogn. Technol. Work 2019, 21, 69–85. [Google Scholar] [CrossRef]
- Zimmermann, R.; Wettach, R. First Step into visceral interaction with autonomous vehicles. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications-AutomotiveUI’17, Oldenburg, Germany, 24–27 September 2017; pp. 58–64. [Google Scholar]
- Bennett, J.M.; Challinor, K.L.; Modesto, O.; Prabhakharan, P. Attribution of blame of crash causation across varying levels of vehicle automation. Saf. Sci. 2020, 132, 104968. [Google Scholar] [CrossRef]
- Emirler, M.T.; Wang, H.; Güvenç, B.A. Socially acceptable collision avoidance system for vulnerable road users. IFAC-PapersOnLine 2016, 49, 436–441. [Google Scholar] [CrossRef]
- Moody, J.; Bailey, N.; Zhao, J. Public perceptions of autonomous vehicle safety: An international comparison. Saf. Sci. 2020, 121, 634–650. [Google Scholar] [CrossRef]
- Tafidis, P.; Pirdavani, A.; Brijs, T.; Farah, H. Can automated vehicles improve cyclist safety in urban areas? Safety 2019, 5, 57. [Google Scholar] [CrossRef]
- Chen, B.; Zhao, D.; Peng, H. Evaluation of automated vehicles encountering pedestrians at unsignalized crossings. IEEE Intell. Veh. Symp. 2017, 1679–1685. [Google Scholar] [CrossRef]
- Ackermann, C.; Beggiato, M.; Schubert, S.; Krems, J.F. An experimental study to investigate design and assessment criteria: What is important for communication between pedestrians and automated vehicles? Appl. Ergon. 2019, 75, 272–282. [Google Scholar] [CrossRef] [PubMed]
- Merat, N.; Louw, T.; Madigan, R.; Wilbrink, M.; Schieben, A. What externally presented information do VRUs require when interacting with fully Automated Road Transport Systems in shared space? Accid. Anal. Prev. 2018, 118, 244–252. [Google Scholar] [CrossRef] [PubMed]
- Holländer, K.; Wintersberger, P.; Butz, A. Overtrust in external cues of automated vehicles: An experimental investigation. In Proceedings of the 11th International Conference Automotive User Interfaces, Utrecht, The Netherlands, 22–25 September 2019; pp. 211–222. [Google Scholar]
- Kaleefathullah, A.A.; Merat, N.; Lee, Y.M.; Eisma, Y.B.; Madigan, R.; Garcia, J.; de Winter, J. External human–machine interfaces can be misleading: An examination of trust development and misuse in a CAVE-based pedestrian simulation environment. Hum. Factors 2020, 64, 1070–1085. [Google Scholar] [CrossRef] [PubMed]
- Dey, D.; Martens, M.; Eggen, B.; Terken, J. Pedestrian road-crossing willingness as a function of vehicle automation, external appearance, and driving behaviour. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 191–205. [Google Scholar] [CrossRef]
- Merlino, S.; Mondada, L. Crossing the street: How pedestrians interact with cars. Lang. Commun. 2019, 65, 131–147. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, H.; Wu, J.; Zheng, Y.; Liu, H. Trajectory tracking and prediction of pedestrian’s crossing intention using roadside LiDAR. IET Intell. Transp. Syst. 2019, 13, 789–795. [Google Scholar] [CrossRef]
- Guéguen, N.; Meineri, S.; Eyssartier, C. A pedestrian’s stare and drivers’ stopping behavior: A field experiment at the pedestrian crossing. Saf. Sci. 2015, 75, 87–89. [Google Scholar] [CrossRef]
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef]
- Walker, I. Signals are informative but slow down responses when drivers meet bicyclists at road junctions. Accid. Anal. Prev. 2005, 37, 1074–1085. [Google Scholar] [CrossRef]
- Ackermann, C.; Beggiato, M.; Bluhm, L.F.; Krems, J. Vehicle movement and its potential as implicit communication signal for pedestrians and automated vehicles Retrieved. In Proceedings of the 6th Humanist Conference, The Hague, The Netherlands, 13–14 June 2018; pp. 1–7. [Google Scholar]
- Beggiato, M.; Witzlack, C.; Springer, S.; Krems, J.F. The right moment for braking as informal communication signal between automated vehicles and pedestrians in crossing situations. In Advances in Human Aspects of Transportation, Proceedings of the AHFE 2017 Conference on Human Factors in Transportation, Los Angeles, CA, USA, 17–21 July 2017; Stanton, N., Ed.; Springer: Cham, Switzerland, 2018; pp. 1072–1081. [Google Scholar]
- Rothenbucher, D.; Mok, B.; Li, J.; Ju, W.; Sirkin, D. Ghost driver: A platform for investigating interactions between pedestrians and driverless vehicles. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (Automotiveui’15), Nottingham, UK, 1–3 September 2015; pp. 44–49. [Google Scholar]
- Mitman, M.F.; Ragland, R.D.; Zegeer, V.C. The marked crosswalk dilemma: Uncovering some missing links in a 35-year debate. Transp. Res. Rec. 2008, 2073, 86–93. [Google Scholar]
- Zhuang, X.; Wu, C. The safety margin and perceived safety of pedestrians at unmarked roadway. Transp. Res. Part F Traffic Psychol. Behav. 2012, 15, 119–131. [Google Scholar] [CrossRef]
- Habibovic, A.; Andersson, J.; Nilsson, M.; Lundgren, V.M.; Nilsson, J. Evaluating interactions with non-existing automated vehicles: Three Wizard of Oz approaches. IEEE Intell. Veh. Symp. 2016, 32–37. [Google Scholar] [CrossRef]
- Getis, A.; Ord, J.K. The analysis of spatial association by use of distance statistics. Geogr. Anal. 1992, 24, 189–206. [Google Scholar] [CrossRef]
- Ord, J.K.; Getis, A. Local spatial autocorrelation statistics: Distributional issues and an application. Geogr. Anal. 1995, 27, 286–306. [Google Scholar] [CrossRef]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Rodríguez Palmeiro, A.; van der Kint, S.; Vissers, L.; Farah, H.; de Winter, J.C.F.; Hagenzieker, M. Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 1005–1020. [Google Scholar] [CrossRef]
- Lobjois, R.; Cavallo, V. Age-related differences in street-crossing decisions: The effects of vehicle speed and time constraints on gap selection in an estimation task. Accid. Anal. Prev. 2007, 39, 934–943. [Google Scholar] [CrossRef]
- Turner, C.; McClure, R. Age and gender differences in risk-taking behaviour as an explanation for high incidence of motor vehicle crashes as a driver in young males. Inj. Control Saf. Promot. 2003, 10, 123–130. [Google Scholar] [CrossRef]
- Montoro, L.; Useche, S.A.; Alonso, F.; Lijarcio, I.; Bosó-Seguí, P.; Martí-Belda, A. Perceived safety and attributed value as predictors of the intention to use autonomous vehicles: A national study with Spanish drivers. Saf. Sci. 2019, 120, 865–876. [Google Scholar] [CrossRef]
- de Clercq, K.; Dietrich, A.; Núñez Velasco, J.P.; de Winter, J.; Happee, R. External human–machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Hum. Factors 2019, 61, 1353–1370. [Google Scholar] [CrossRef] [PubMed]
- Klatt, W.K.; Chesham, A.; Lobmaier, J.S. Putting up a big front: Car design and size affect road-crossing behaviour. PLoS ONE 2016, 11, e0159455. [Google Scholar] [CrossRef] [PubMed]
- Windhager, S.; Bookstein, F.L.; Grammer, K.; Oberzaucher, E.; Said, H.; Slice, D.E.; Thorstensen, T.; Schaefer, K. ‘Cars have their own faces’: Cross-cultural ratings of car shapes in biological (stereotypical) terms. Evol. Hum. Behav. 2012, 33, 109–120. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Vehicle | Driver | Passenger |
|---|---|---|---|
| Scenario 1 | CV | Yes | No |
| Scenario 2 | AV | No (Wizard of Oz) | No |
| Age | Scenario 1 | Scenario 2 |
|---|---|---|
| 20–29 | 16 | 16 |
| 30–39 | 5 | 4 |
| 40–49 | 4 | 0 |
| 50–59 | 2 | 4 |
| 60–69 | 6 | 9 |
| 70–79 | 4 | 5 |
| 80–89 | 1 | 0 |
| Total | 38 | 38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taima, M.; Daimon, T. Differences in Pedestrian Behavior at Crosswalk between Communicating with Conventional Vehicle and Automated Vehicle in Real Traffic Environment. Safety 2023, 9, 2. https://doi.org/10.3390/safety9010002
Taima M, Daimon T. Differences in Pedestrian Behavior at Crosswalk between Communicating with Conventional Vehicle and Automated Vehicle in Real Traffic Environment. Safety. 2023; 9(1):2. https://doi.org/10.3390/safety9010002
Chicago/Turabian StyleTaima, Masahiro, and Tatsuru Daimon. 2023. "Differences in Pedestrian Behavior at Crosswalk between Communicating with Conventional Vehicle and Automated Vehicle in Real Traffic Environment" Safety 9, no. 1: 2. https://doi.org/10.3390/safety9010002
APA StyleTaima, M., & Daimon, T. (2023). Differences in Pedestrian Behavior at Crosswalk between Communicating with Conventional Vehicle and Automated Vehicle in Real Traffic Environment. Safety, 9(1), 2. https://doi.org/10.3390/safety9010002