
DRM-Based Colour Photometric Stereo Using Diffuse-Specular Separation for Non-Lambertian Surfaces


Abstract
1. Introduction
2. Colour PS Incorporating Dichromatic Reflectance Model
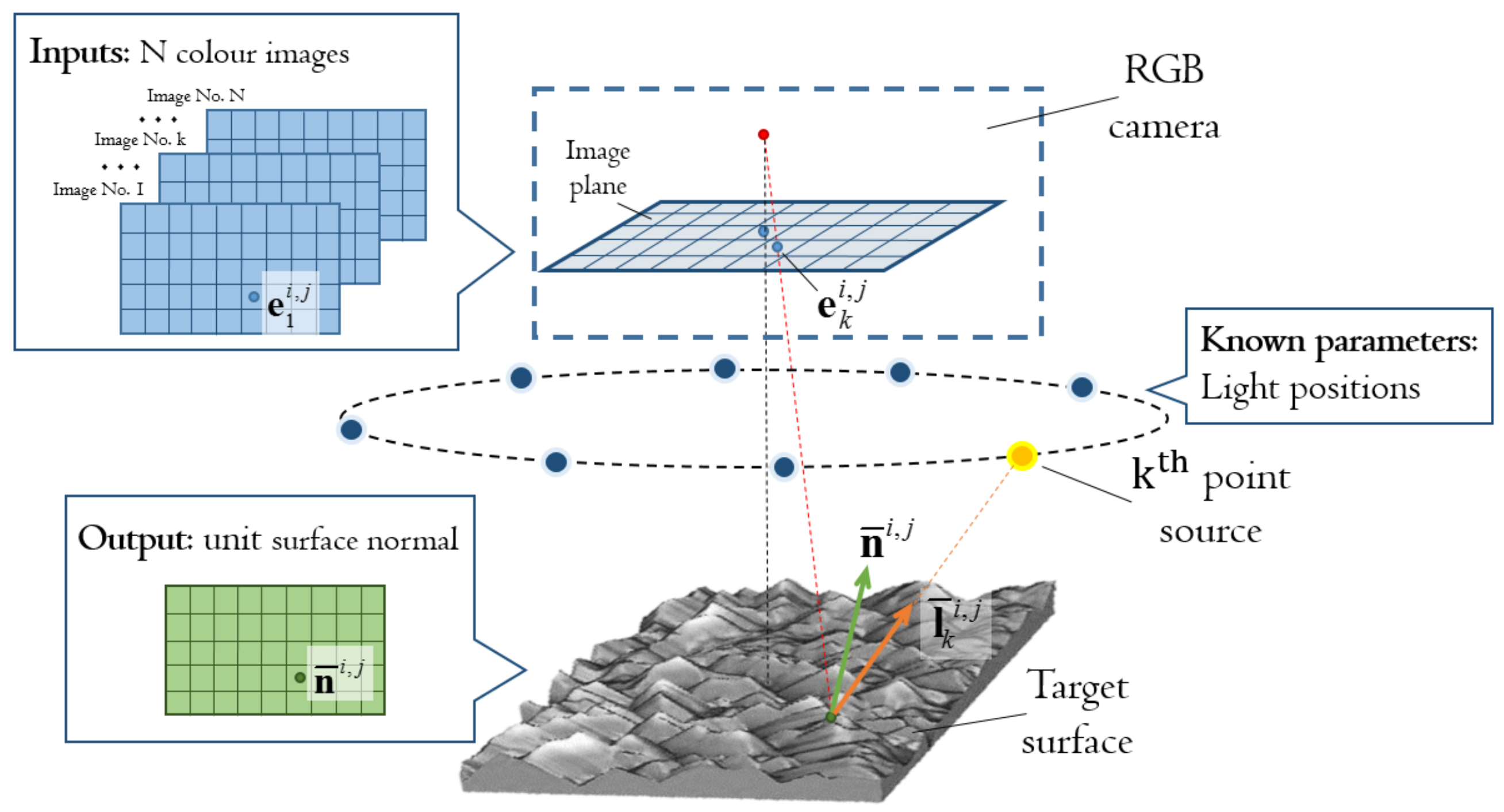
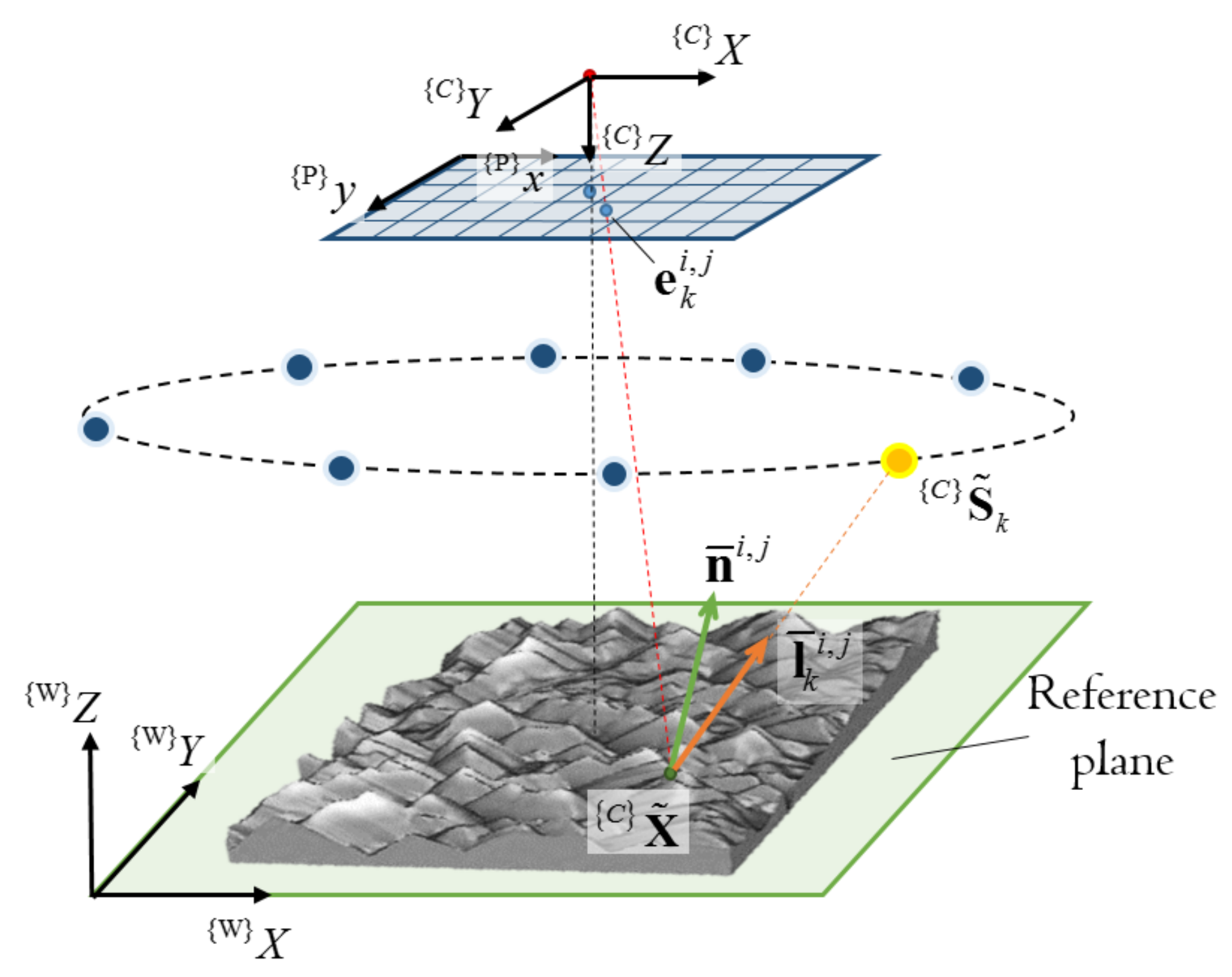
2.1. Generic Colour PS Problem Formulation
2.2. Colour Image Formation Model
2.3. Colour PS Methods Using DRM
3. DRM-Based Colour PS Method Using Diffuse-Specular Separation
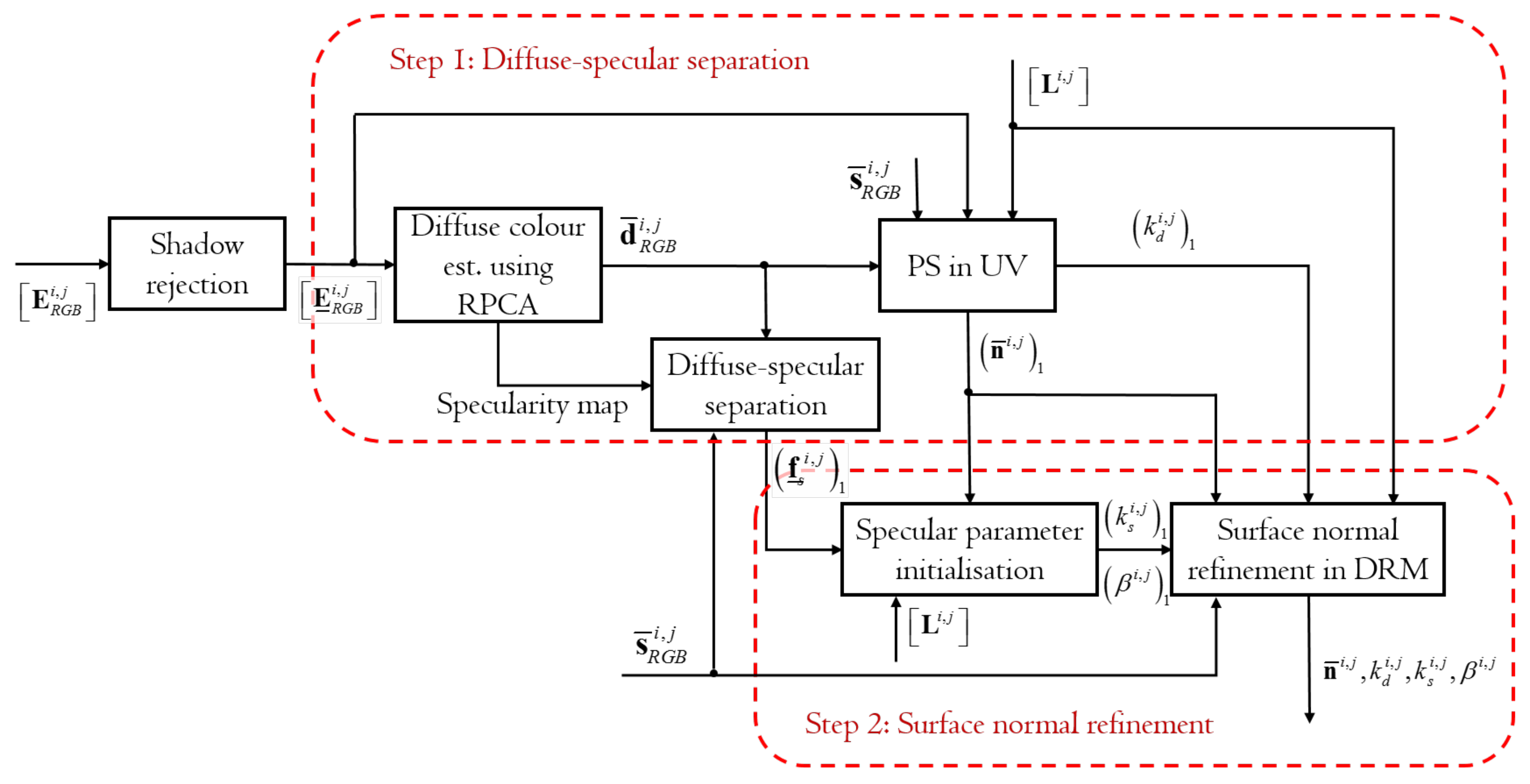
3.1. Overview of the Proposed Color PS Method
3.2. Diffuse-Specular Separation
3.2.1. Diffuse Color Estimation
- 1.
- Perform principle component analysis (PCA) for to estimate ;
- 2.
- Compute residual matrix: .
- 3.
- Compute residual vector: , where and denotes the hadamard square.
- 4.
- If the mean of , , is smaller than the threshold , terminate RPCA and output the current estimate of and the specularity map. Otherwise, find the element that provides the maximal value of and register in the specularity map. Remove the corresponding row vector in and repeat from step 1.
3.2.2. Diffuse-Specular Separability Check
3.2.3. PS in UV Space
3.2.4. Outlier Estimation
3.3. Surface Normal Refinement
3.3.1. Specular Parameter Initialisation
3.3.2. Surface Normal Refinement in DRM
4. Performance Evaluation on Surface Orientation Estimation
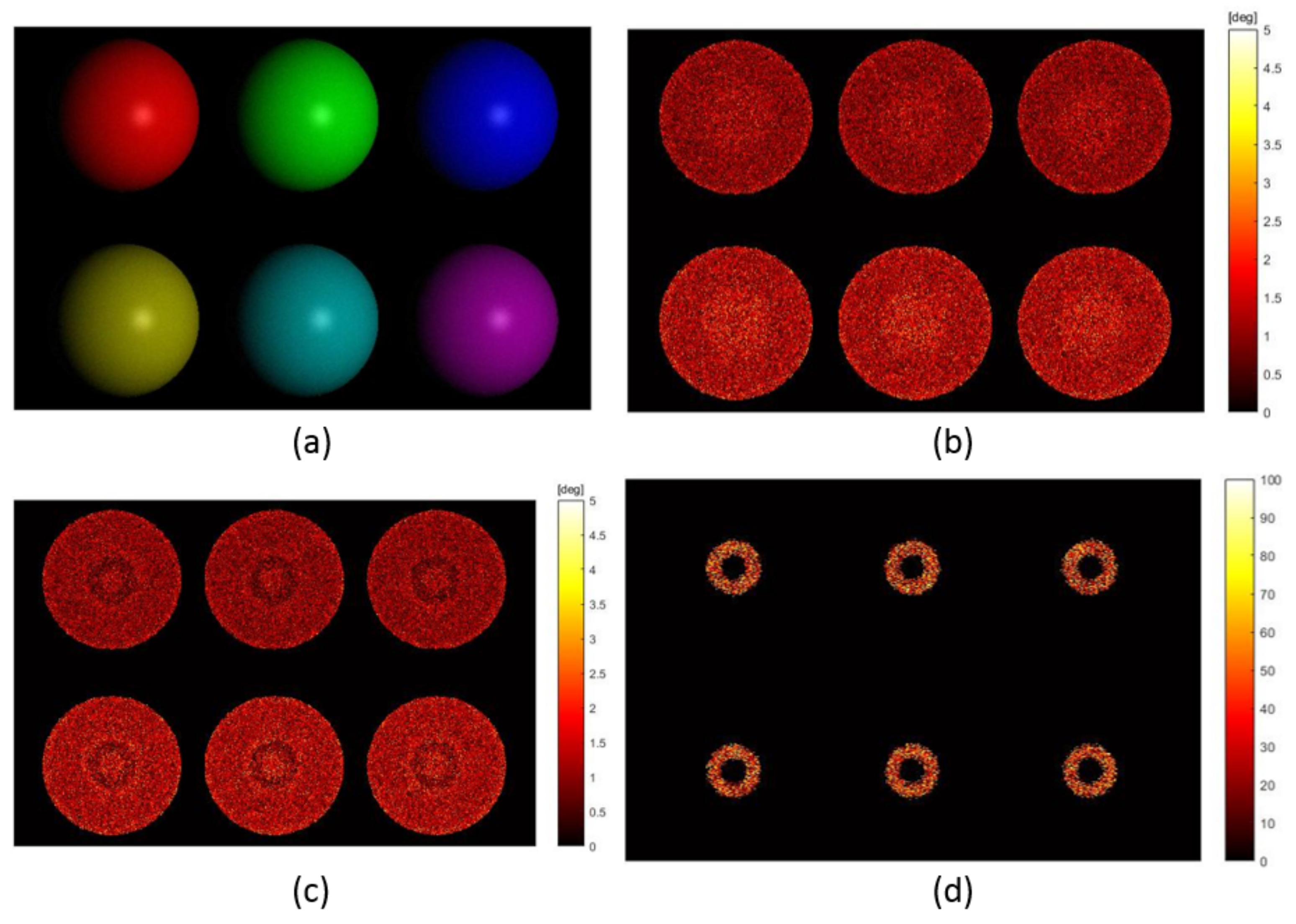
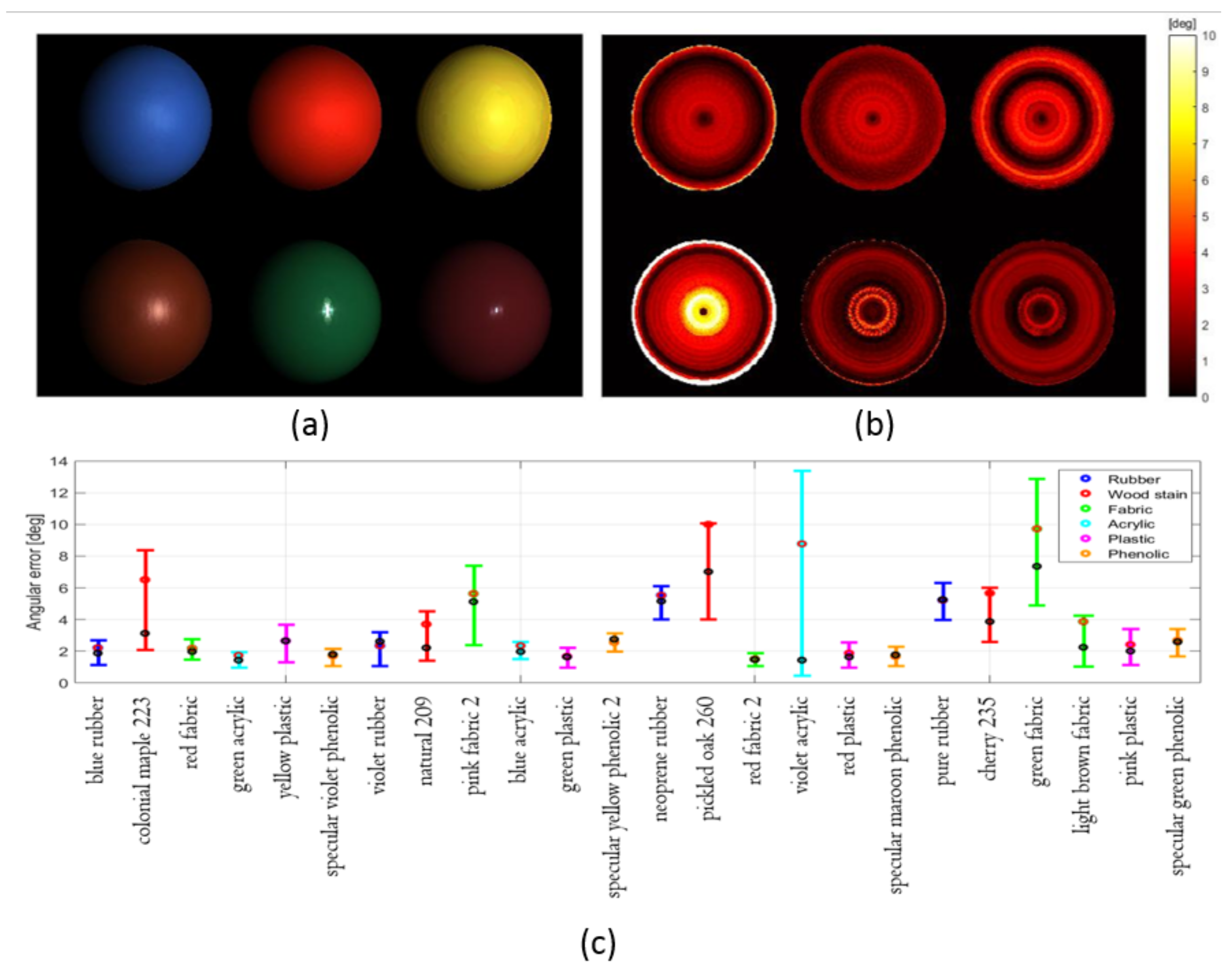
4.1. Evaluations Using Synthetic Images
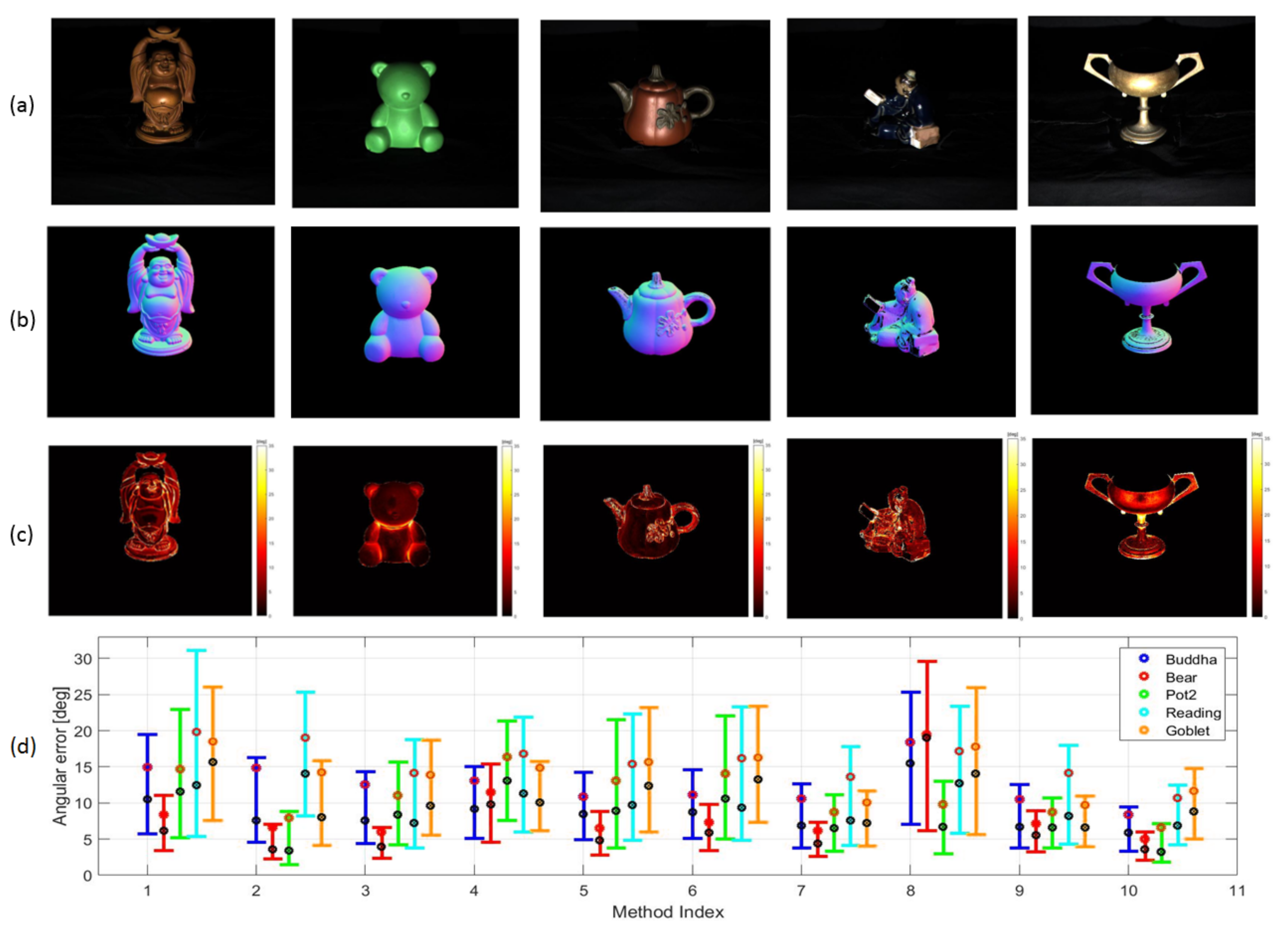
4.2. Evaluations Using Real Images
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ackermann, J.; Goesele, M. A survey of photometric stereo techniques. J. Found. Trends Comput. Graph. Vis. 2015, 9, 149–254. [Google Scholar] [CrossRef]
- Klasing, K.; Althoff, D.; Wollherr, D.; Buss, M. Comparison of surface normal estimation methods for range sensing applications. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3206–3211. [Google Scholar]
- Woodham, R.J. Photometric method for determining surface orientation from multiple images. Opt. Eng. 1980, 19, 139–144. [Google Scholar] [CrossRef]
- Shi, B.; Zhe, W.; Mo, Z.; Duan, D.; Yeung, S.; Tan, P. A benchmark dataset and evaluation for non-Lambertian and uncalibrated photometric stereo. In Proceedings of the Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3707–3716. [Google Scholar]
- Shell, J.R. Bidirectional Reflectance: An Overview with Remote Sensing Applications & Measurement Recommendations. 2004, pp. 37–50. Available online: http://web.gps.caltech.edu/~vijay/Papers/BRDF/shell-04.pdf (accessed on 4 January 2022).
- Nayar, S.K.; Ikeuchi, K.; Kanade, T. Determining shape and reflectance of hybrid surfaces by photometric sampling. IEEE Trans. Robot. Autom. 1990, 6, 418–431. [Google Scholar] [CrossRef]
- Torrance, K.E.; Sparrow, E.M. Theory for off-specular reflection from roughened surfaces. J. Opt. Soc. Am. 1967, 57, 1105–1114. [Google Scholar] [CrossRef]
- Georghiades, A. Incorporating the Torrance and Sparrow model of reflectance in uncalibrated photometric stereo. In Proceedings of the Proceedings Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 816–823. [Google Scholar]
- Goldman, D.B.; Curless, B.; Hertzmann, A.; Seitz, S.M. Shape and spatially-varying BRDFs from photometric stereo. IEEE Trans. PAMI 2010, 32, 1060–1071. [Google Scholar] [CrossRef] [PubMed]
- Ward, G.J. Measuring and modeling anisotropic reflection. In SIGGRAPH92: Proceedings of the 19th Annual Conference and Exhibition on Computer Graphics and Interactive Techniques; Association for Computing Machinery: New York, NY, USA, 1992; pp. 265–272. [Google Scholar]
- Alldrin, N.G.; Zickler, T.; Kriegman, D.J. Photometric stereo with non-parametric and spatially-varying reflectance. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Higo, T.; Matsushita, Y.; Ikeuchi, K. Consensus photometric stereo. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1157–1164. [Google Scholar]
- Shi, B.; Tan, P.; Matsushita, Y.; Ikeuchi, K. Bipolynomial modeling of low-frequency reflectances. IEEE Trans. PAMI 2014, 36, 1078–1091. [Google Scholar] [CrossRef] [PubMed]
- Ikehata, S.; Aizawa, K. Photometric stereo using constrained bivariate regression for general isotropic surfaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 23–28. [Google Scholar]
- Santo, H.; Samejima, M.; Sugano, Y.; Shi, B.; Matsushita, Y. Deep photometric stereo network. In Proceedings of the International Workshop on PBDL in Conjunction with IEEE ICCV, Venice, Italy, 22–29 October 2017; pp. 1–9. [Google Scholar]
- Santo, H.; Samejima, M.; Sugano, Y.; Shi, B.; Matsushita, Y. Deep photometric stereo networks for determining surface normal and reflectances. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 114–128. [Google Scholar] [CrossRef] [PubMed]
- Taniai, T.; Maehara, T. Neural inverse rendering for general reflectance photometric stereo. In Proceedings of the 35th International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018. [Google Scholar]
- Ikehata, S. CNN-PS: CNN-based photometric stereo for general non-convex surfaces. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–18. [Google Scholar]
- Wu, L.; Ganesh, A.; Shi, B.; Matsushita, Y.; Wang, Y.; Ma, Y. Robust photometric stereo via low-rank matrix completion and recovery. In Proceedings of the 10th Asian Conference on Computer Vision, Queenstown, New Zealand, 8–12 November 2010; pp. 703–717. [Google Scholar]
- Ikehata, S.; Wipf, D.; Matsushita, Y.; Aizawa, K. Robust photometric stereo using sparse regression. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 318–325. [Google Scholar]
- Barsky, S.; Petrou, M. The 4-source photometric stereo technique for three-dimensional surfaces in the presence of highlights and shadows. IEEE Trans. PAMI 2003, 25, 1239–1252. [Google Scholar] [CrossRef]
- Shafer, S.A. Using colour to separate reflection components. Color Res. Appl. 1985, 10, 210–218. [Google Scholar] [CrossRef]
- Zickler, T.; Mallick, S.P.; Kriegman, D.J.; Belhumeur, P.N. Color subspace as photometric invariants. Int. J. Comput. Vis. 2008, 79, 13–30. [Google Scholar] [CrossRef][Green Version]
- Hartley, R.; Zisserman, A. Chapter 6: Camera Models. In Multiple View Geometry; Cambridge University Press: Cambridge, UK, 2003; pp. 153–177. [Google Scholar]
- Angelopoulou, E. Specular highlight detection based on the fresnel reflection coefficient. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Blinn, J.F. Models of light reflection for computer synthesized pictures. In Proceedings of the 4th Annual Conference on Computer Graphics and Interactive Techniques, San Jose, CA, USA, 20–22 July 1977; pp. 192–198. [Google Scholar]
- Ngan, A.; Dur, F.; Matusik, W. Experimental validation of analytical BRDF models. In Proceedings of the ACM SIGGRAPH 2004 Sketches, Los Angeles, CA, USA, 8–12 August 2004; p. 90. [Google Scholar]
- Kao, Y.H.; Roy, B.V. Directed Principal Component Analysis. Oper. Res. 2014, 62, 957–972. [Google Scholar] [CrossRef][Green Version]
- Pope, A.J. The Statics of Residuals and the Detection of Outliers; NOAA Technical Report; 1976; Volume 1, p. 65. Available online: https://www.ngs.noaa.gov/PUBS_LIB/TRNOS65NGS1.pdf (accessed on 4 January 2022).
- Liu, C.; Freeman, W.T.; Szeliski, R.; Kang, S.B. Noise estimation from a single image. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 901–908. [Google Scholar]
- Artusi, A.; Banterle, F.; Chetverikov, D. A survey of specularity removal methods. Comput. Graph. Forum 2011, 30, 2208–2230. [Google Scholar] [CrossRef]
- Barrow, H.; Tanenbaum, J. Recovering intrinsic scene characteristic from images. Proc. Comput. Vis. Syst. 1978, 2, 3–26. [Google Scholar]
- Matusik, W.; Pfister, H.; Br, M.; McMillan, L. A Data-Driven Reflectance Model. ACM Trans. Graph. 2003, 22, 759–769. [Google Scholar] [CrossRef]
- Shi, B.; Tan, P.; Matsushita, Y.; Ikeuchi, K. Elevation angle from reflectance monotonicity: Photometric stereo for general isotropic reflectances. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 455–468. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Colour | Error of | Mean Improvement | |
|---|---|---|---|---|
| 1 | red | |||
| 2 | yellow | |||
| 3 | green | |||
| 4 | cyan | |||
| 5 | blue | |||
| 6 | magenta |
| Mean | Median | First Quantile | Third Quantile | Error of | ||
|---|---|---|---|---|---|---|
| 100 | ||||||
| 100 | ||||||
| 100 | ||||||
| 20 | ||||||
| 20 | ||||||
| 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Furukawa, T. DRM-Based Colour Photometric Stereo Using Diffuse-Specular Separation for Non-Lambertian Surfaces. J. Imaging 2022, 8, 40. https://doi.org/10.3390/jimaging8020040
Li B, Furukawa T. DRM-Based Colour Photometric Stereo Using Diffuse-Specular Separation for Non-Lambertian Surfaces. Journal of Imaging. 2022; 8(2):40. https://doi.org/10.3390/jimaging8020040
Chicago/Turabian StyleLi, Boren, and Tomonari Furukawa. 2022. "DRM-Based Colour Photometric Stereo Using Diffuse-Specular Separation for Non-Lambertian Surfaces" Journal of Imaging 8, no. 2: 40. https://doi.org/10.3390/jimaging8020040
APA StyleLi, B., & Furukawa, T. (2022). DRM-Based Colour Photometric Stereo Using Diffuse-Specular Separation for Non-Lambertian Surfaces. Journal of Imaging, 8(2), 40. https://doi.org/10.3390/jimaging8020040