
Image Reconstruction and Evaluation: Applications on Micro-Surfaces and Lenna Image Representation

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Modified TPS Algorithm
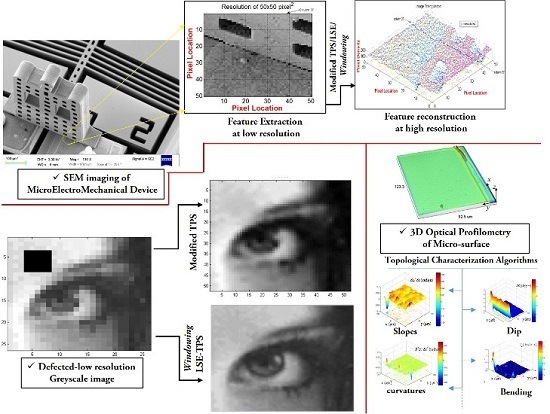
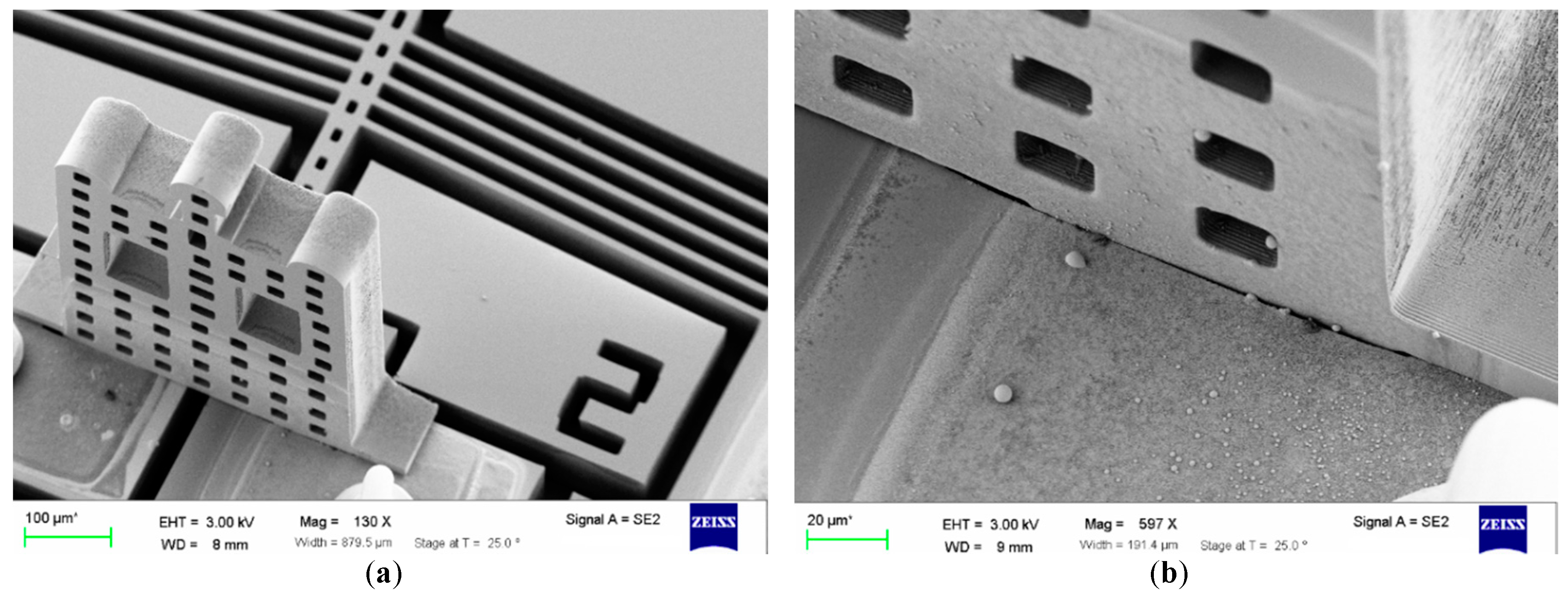
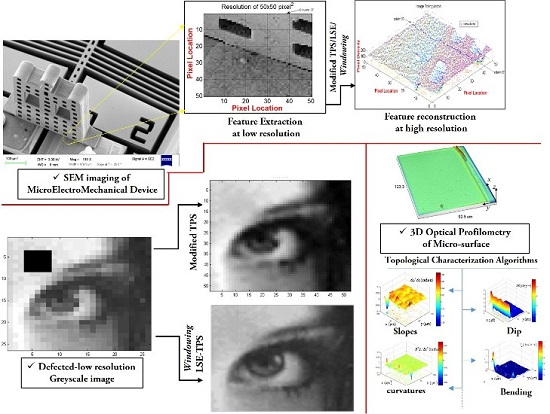
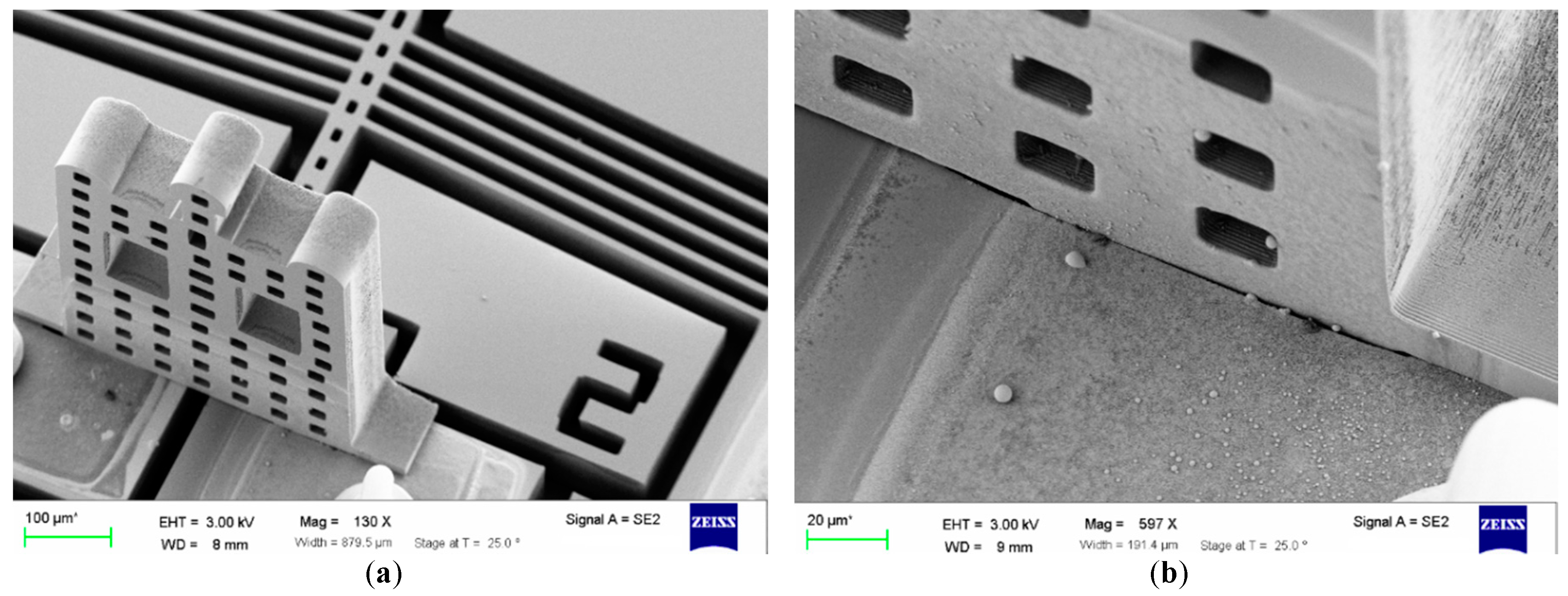
2.2. Characterization of MEMS Micro-Surfaces by Using Modified TPS Algorithm
2.3. Image Processing Based on Modified TPS Algorithms
2.3.1. Modified TPS Based Image-Reconstruction Method
- A spatial neighborhood: this technique reconstructs a region within an image by using the information that is available within it, and without the knowledge from other neighboring regions. The method can be applied either globally for the entire image, or locally for a selected region within the image.
- Spatio-to-temporal neighborhood: this technique reconstructs an image by sequentially updating the information from multiple neighborhoods. For example, an image could be reconstructed and warped from several regions.
2.3.2. Modified TPS Based Denoising Method
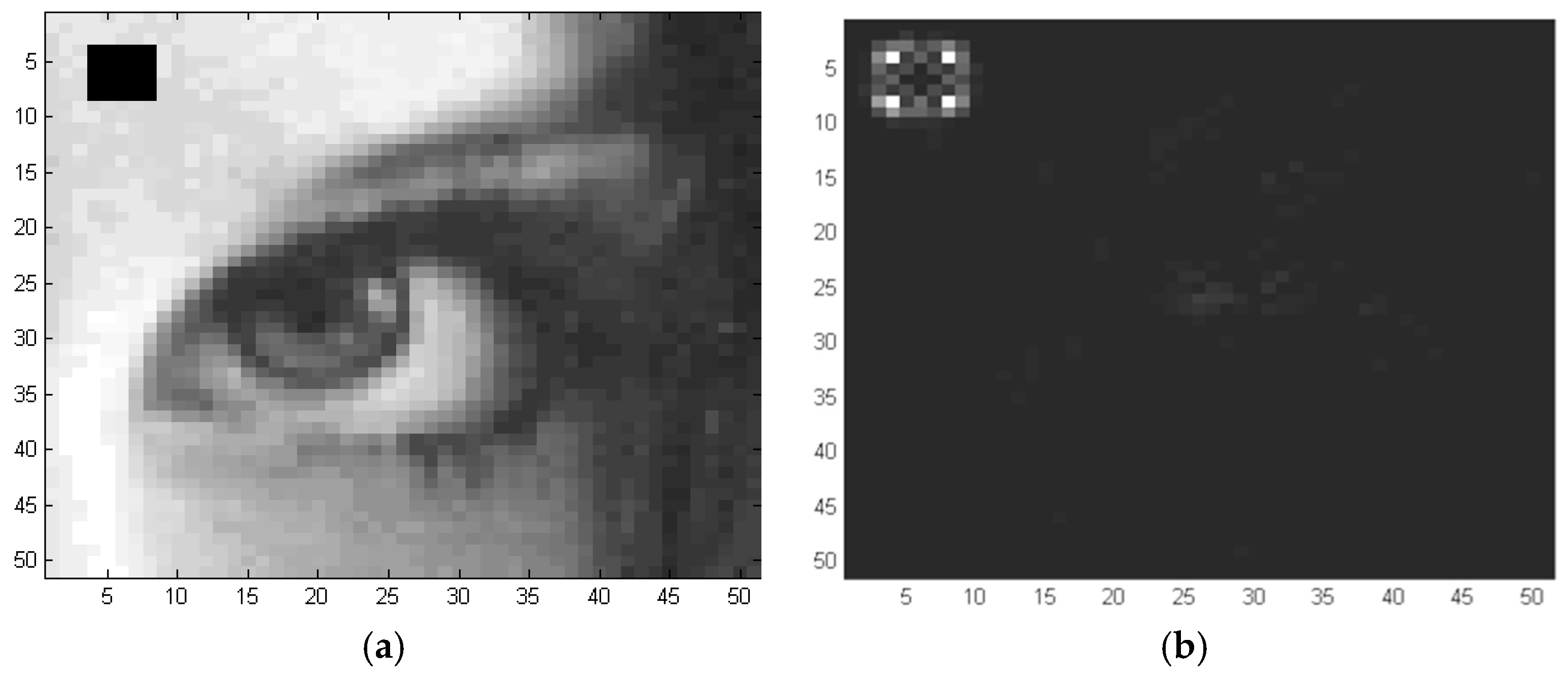
- Construct bending energy image, which is a greyscale intensity image of the defected image, and it is computed by using the bending energy index—Equation (18)—in the global coordinate. The impulsive defects are located in the constructed bending energy image because they are artifacts that tend to have black or white level with strong edges at their spatial boundaries [22]; therefore, a white pixel in the bending energy image corresponds to a black pixel in the original image, and it refers to a local maximum. A black pixel indicates a local minimum, and it corresponds to a white pixel in the original image.
- Obtain the locations of the defects from step (1), and then remove them to create a defect-free DEM; i.e., the original pixel intensity values are free of defect.
- Calculate the modified TPS coefficients from the updated DEM—from step (2)—by using Equation (8). There are two ways to calculate the modified TPS coefficients:
- Global: select all the available information from the updated DEM.
- Local: select a neighborhood for each defect.
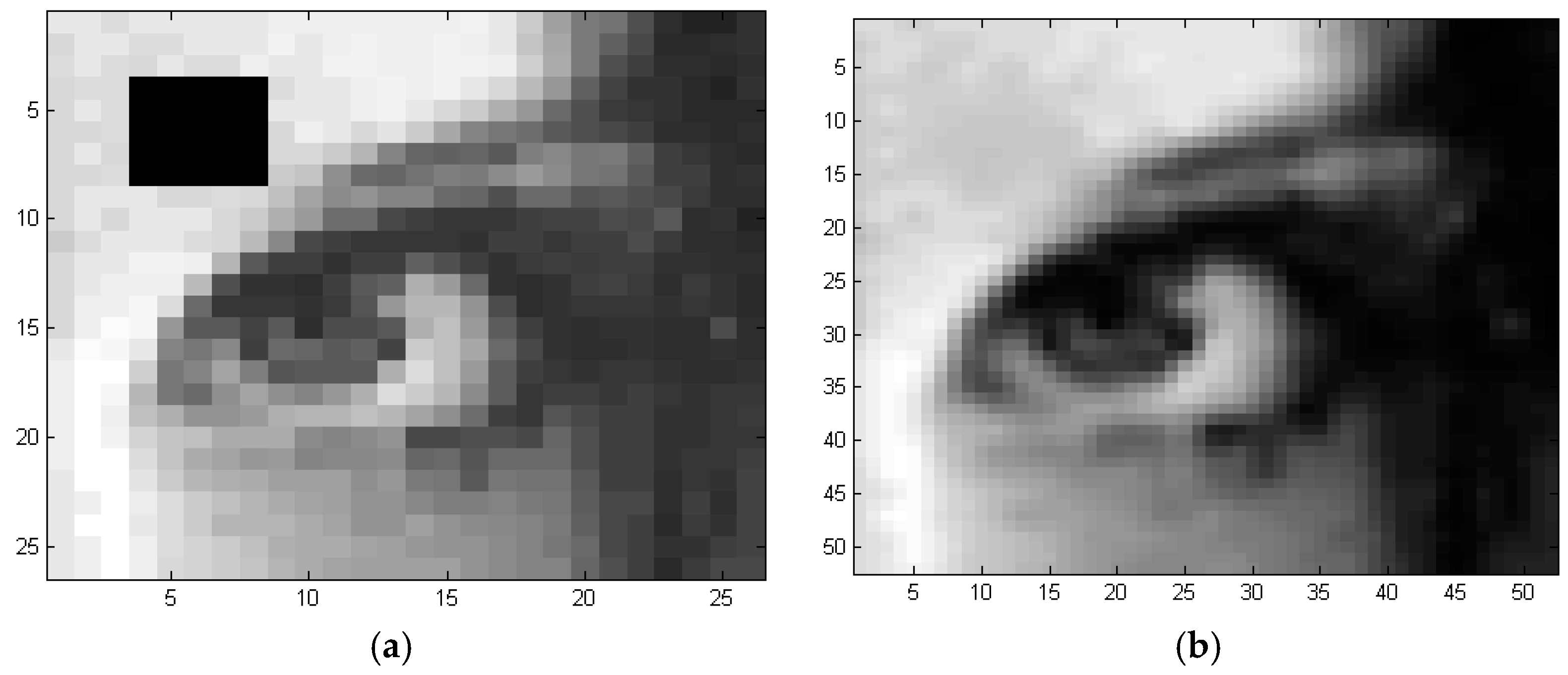
- Interpolate the intensity value of the removed data by using Equation (3).
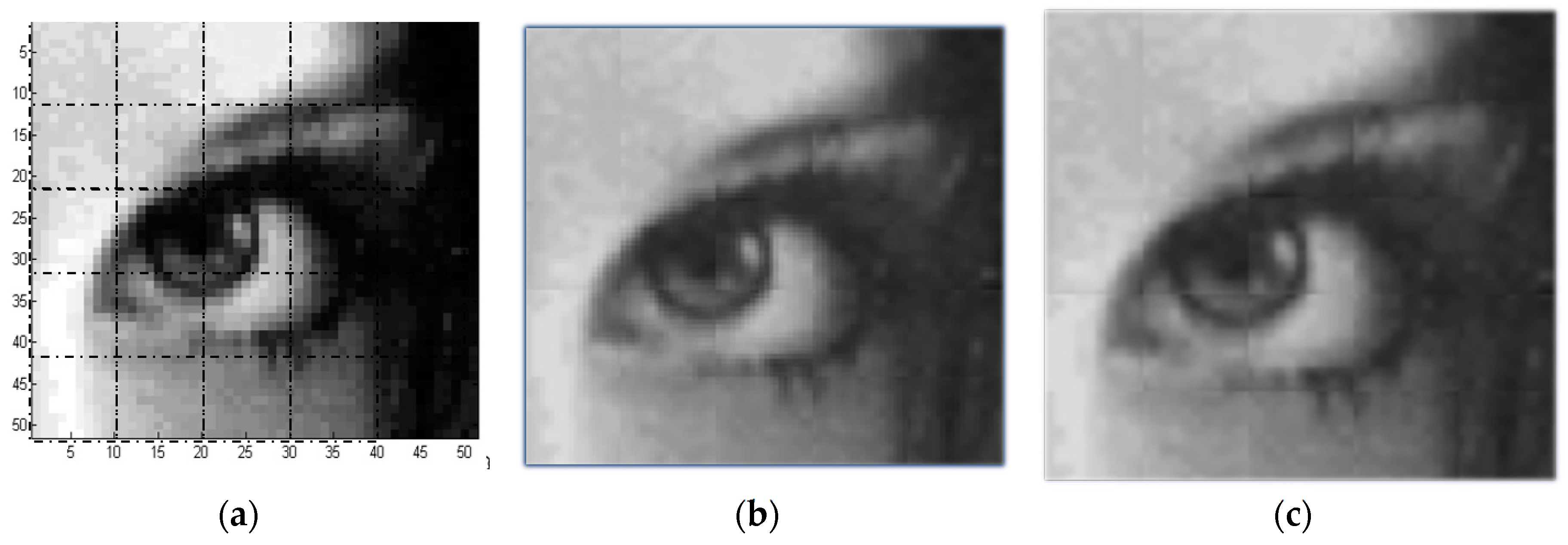
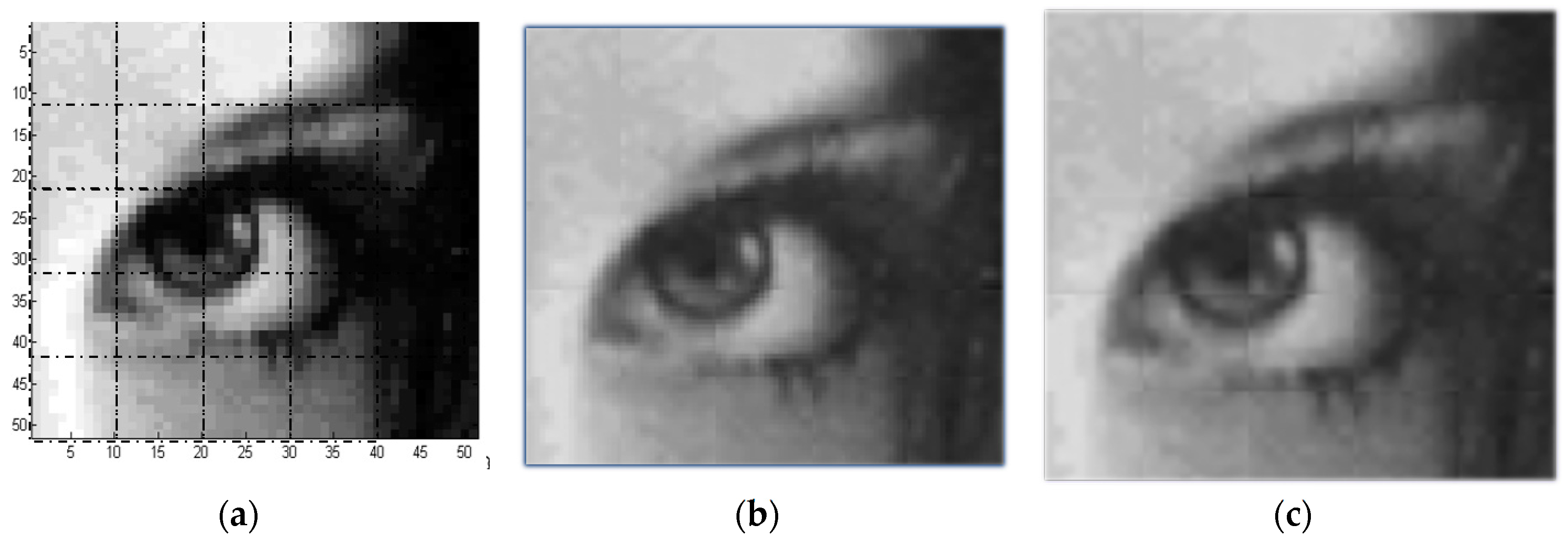
- If required, reconstruct high-resolution image by using the method described in Section 2.3.1.
2.3.3. LSE-TPS Based Warping Algorithm
2.3.4. LSE-TPS Based Rapid Reconstruction Method
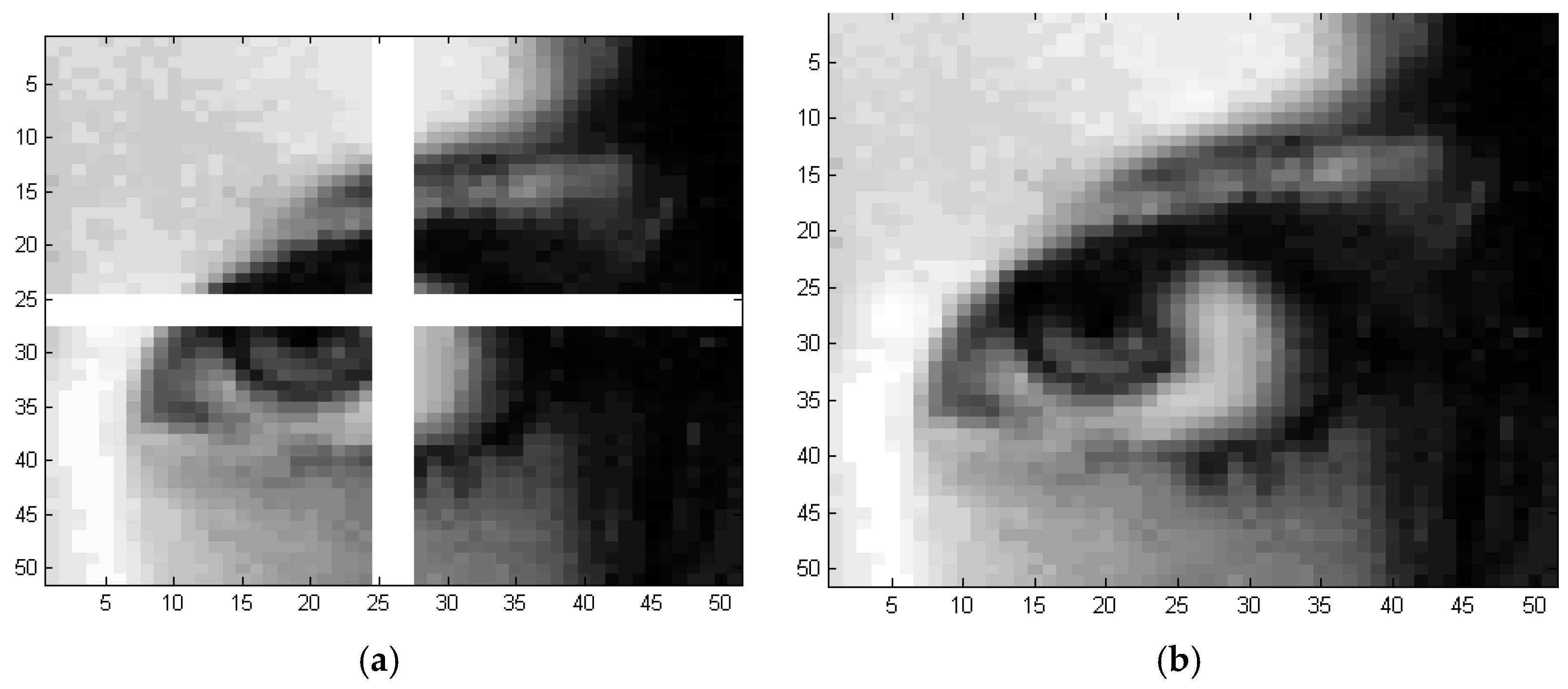
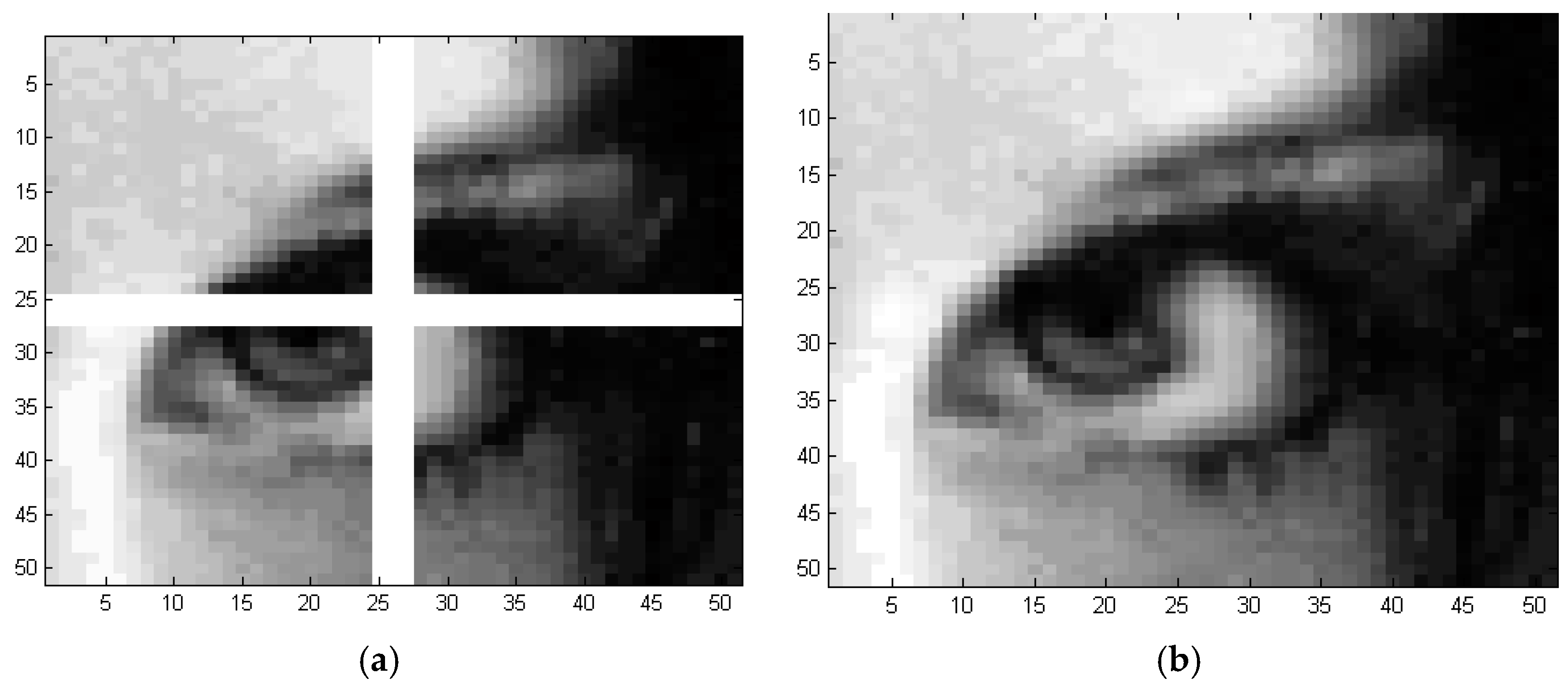
- Reconstruct each patch by using its own control points.
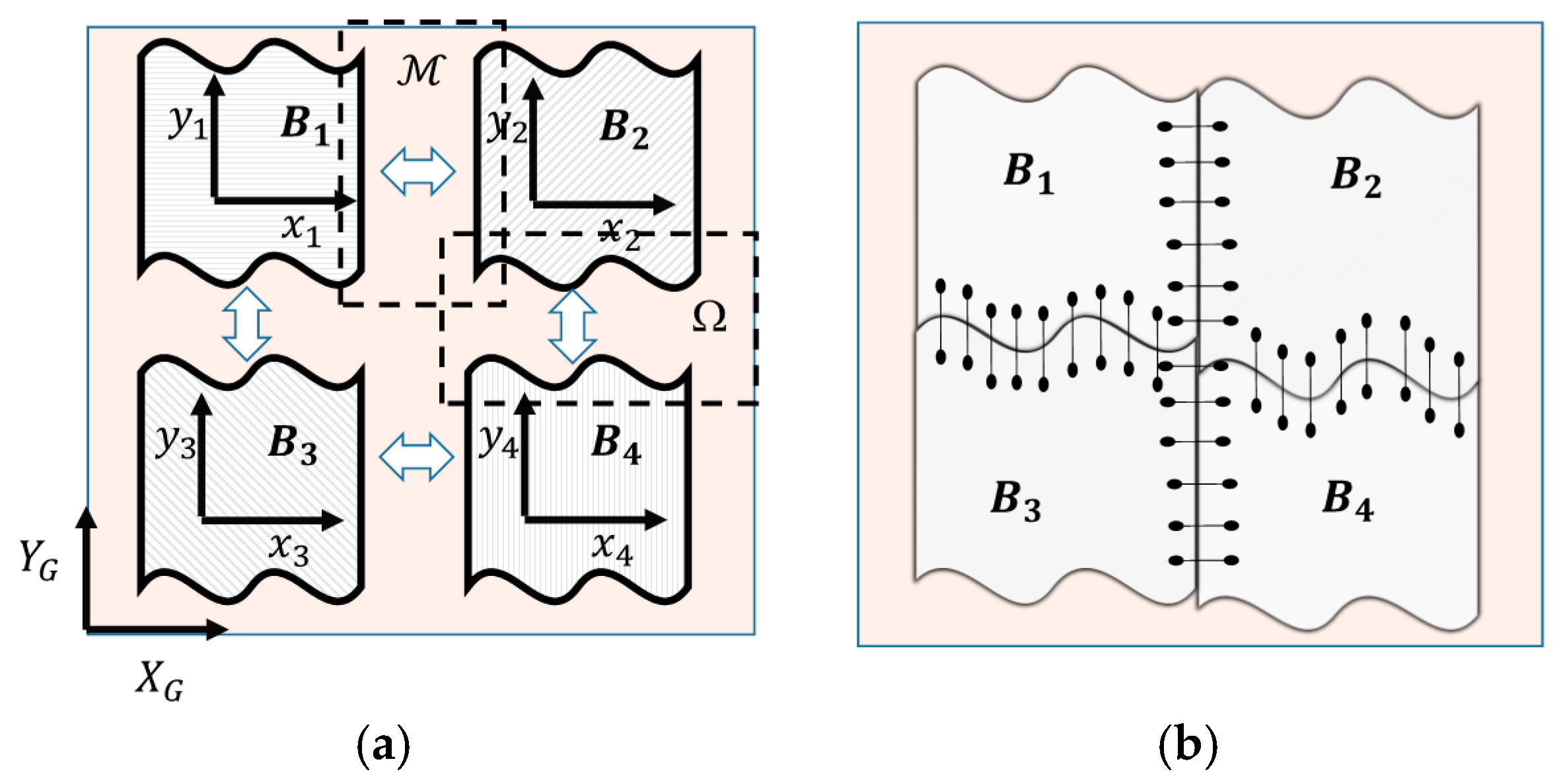
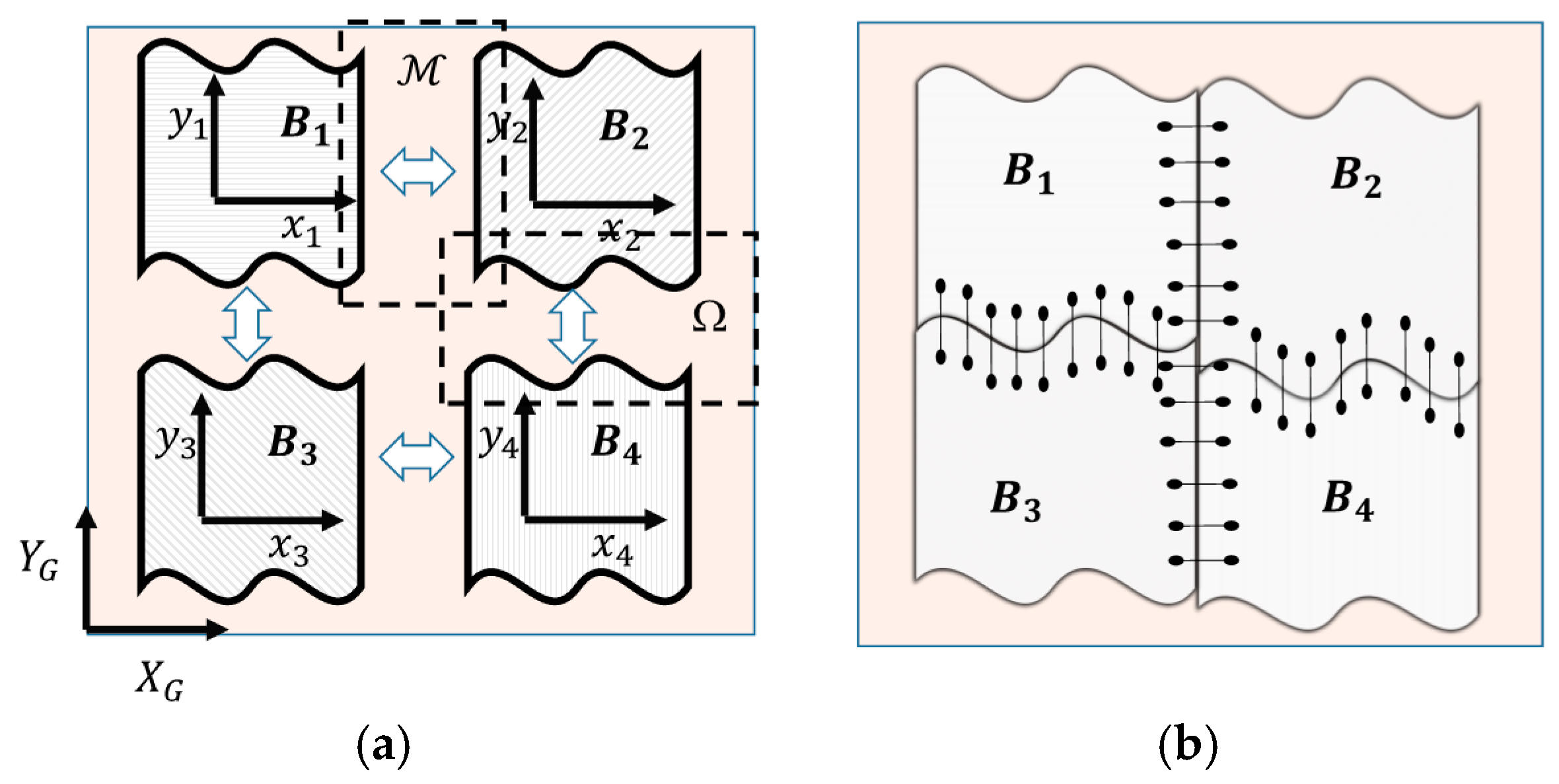
- Warp the patches at their spatial boundaries—for example, regions Ω and in Figure 3a—by selecting a neighboring set of control points for each boundary. Then, reconstruct the boundaries by using adequate method from Section 2.3.1, or the LSE-TPS algorithm that we described in Section 2.3.3. Figure 3b illustrate warping of multiple patches into a single image.
3. Discussion
3.1. Performance Studies of the Modified TPS and Windwoing Techniques
3.2. Previous Studies
4. Application Results
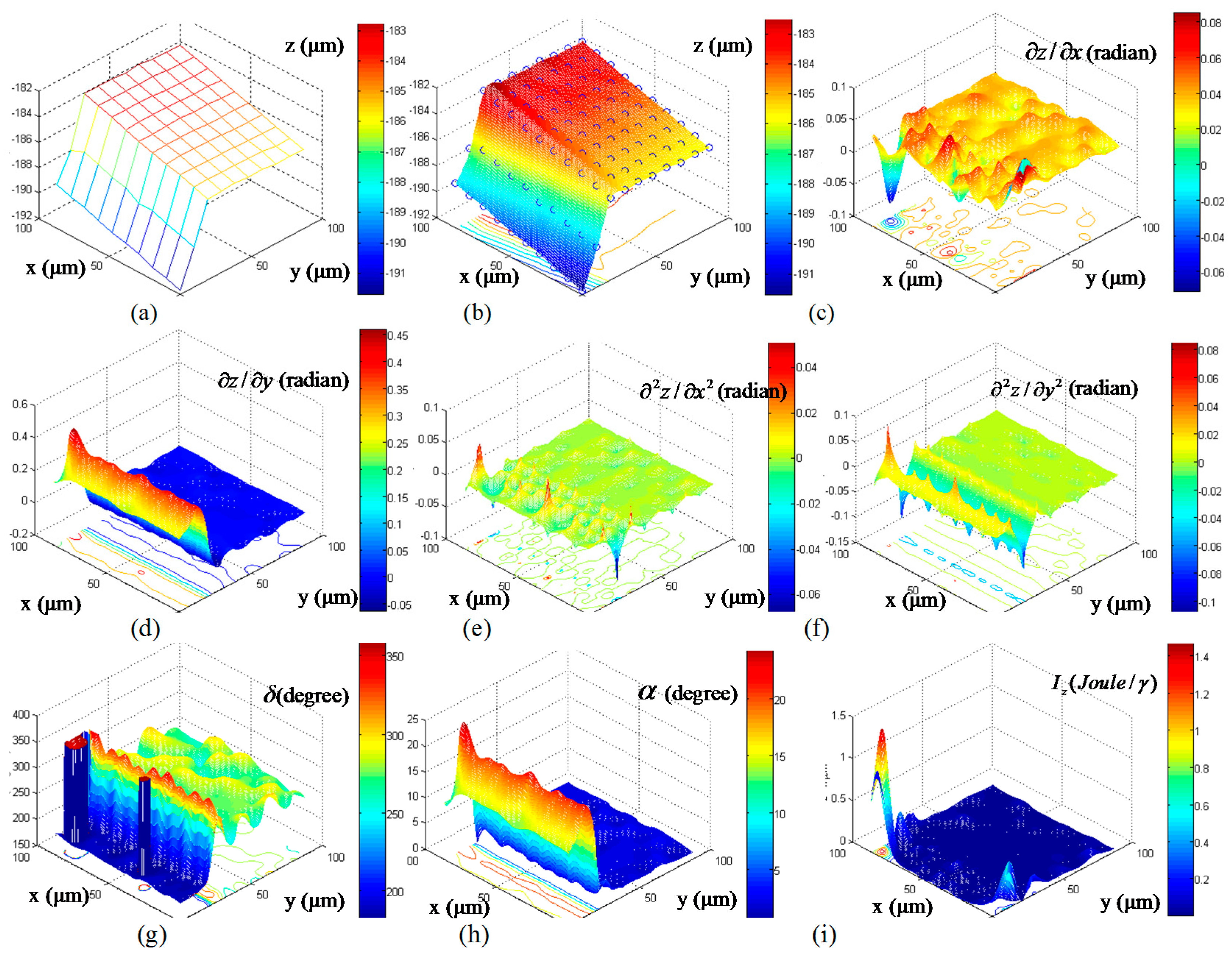
4.1. Characterization of Micro-Surfaces Topology
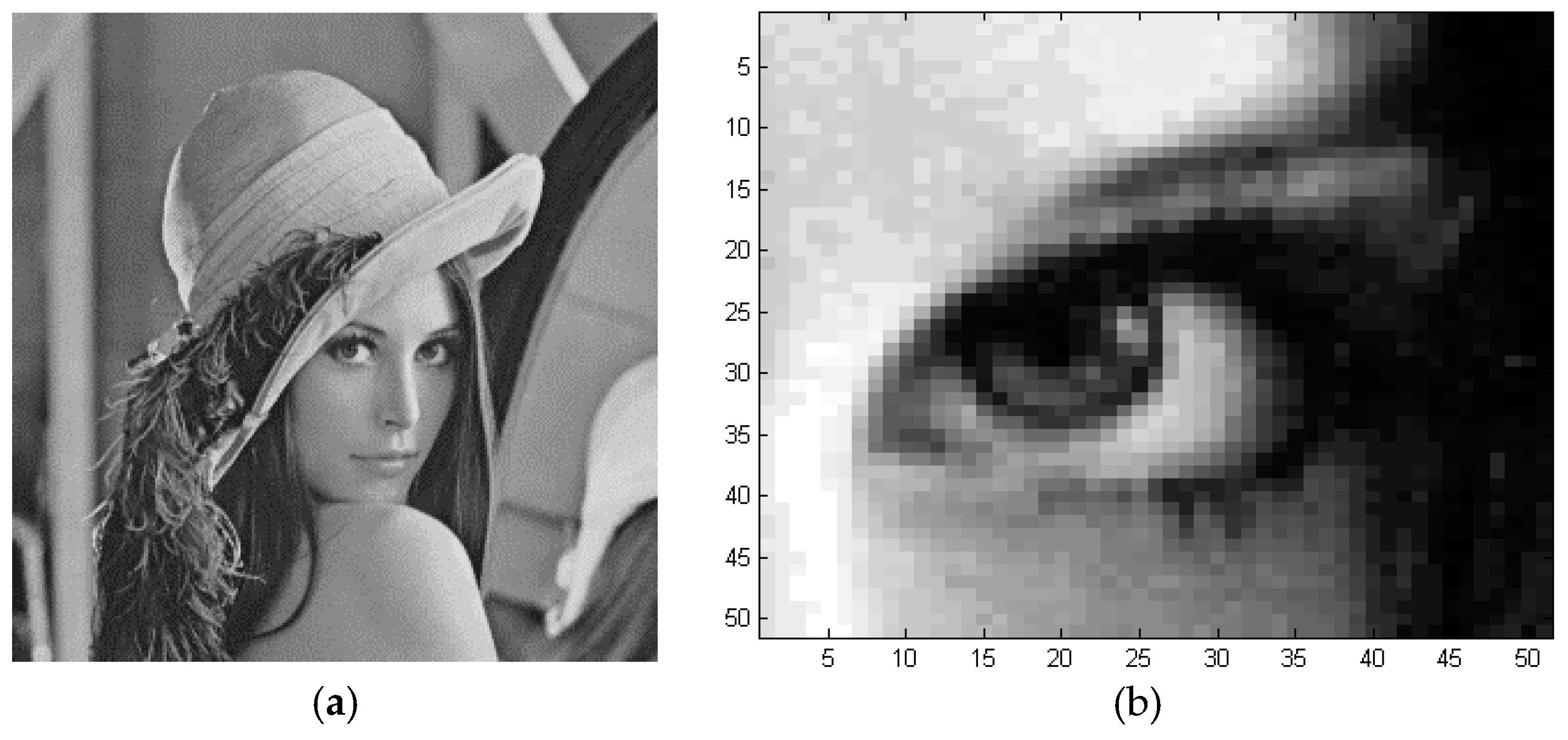
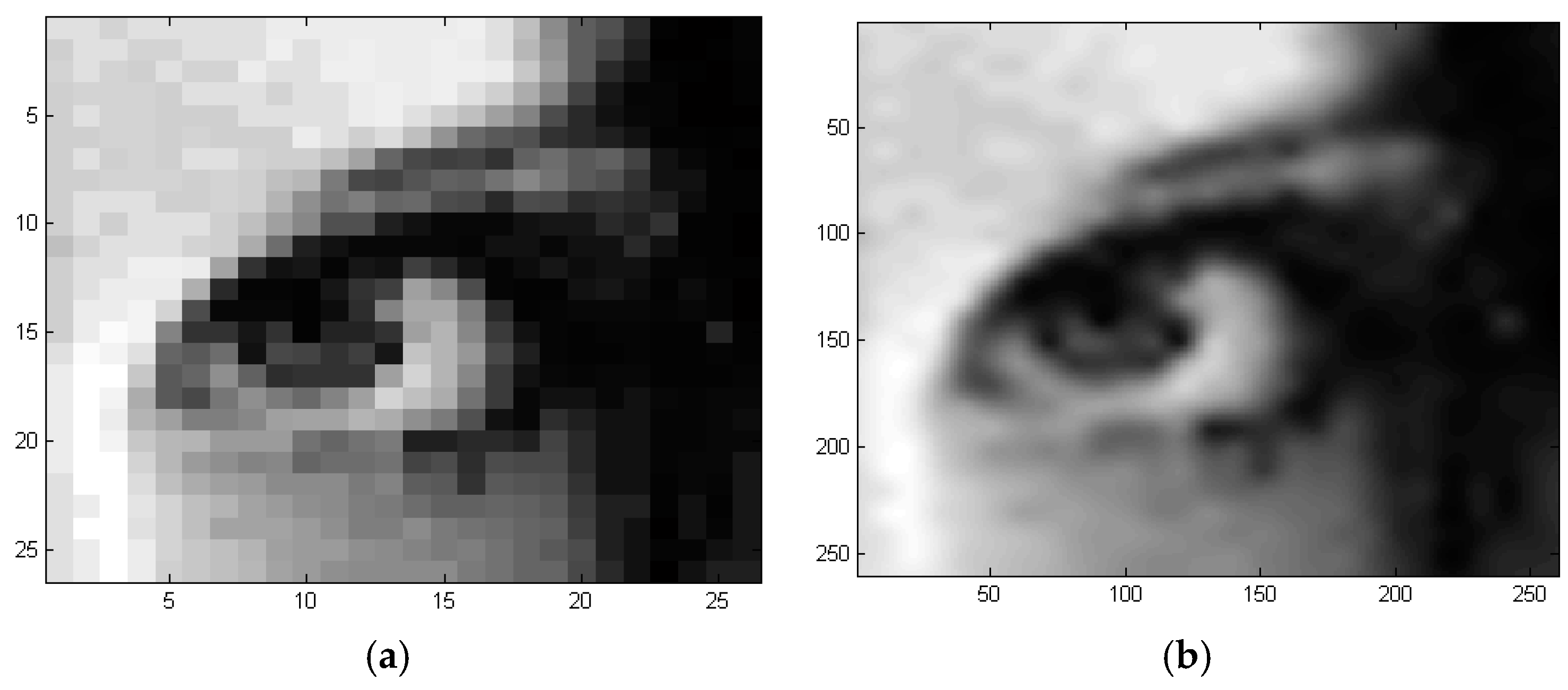
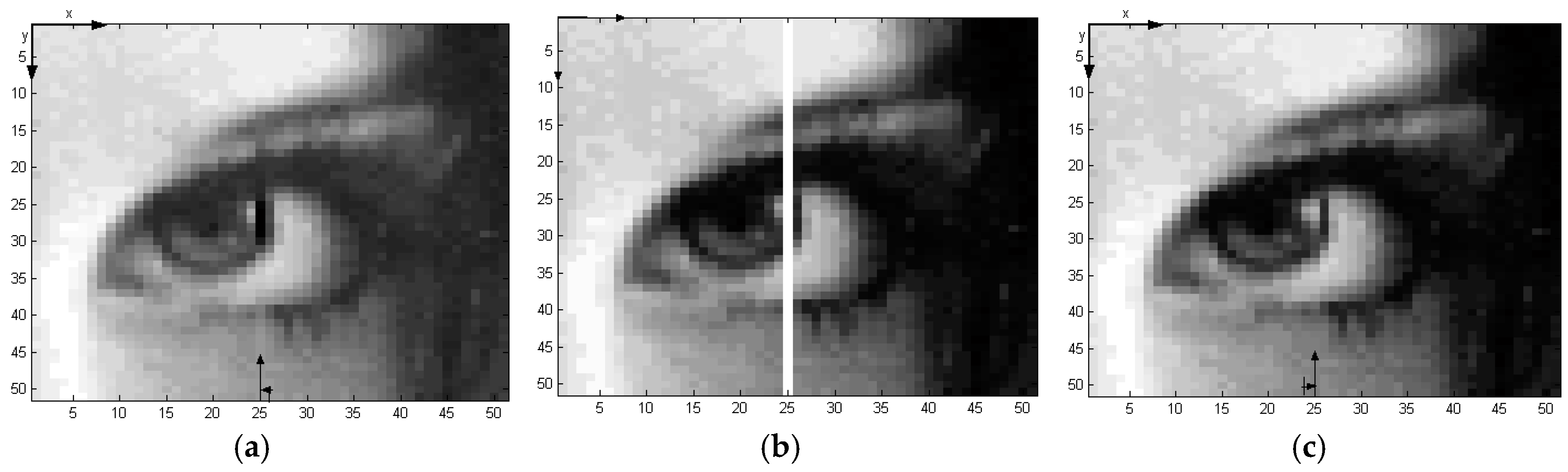
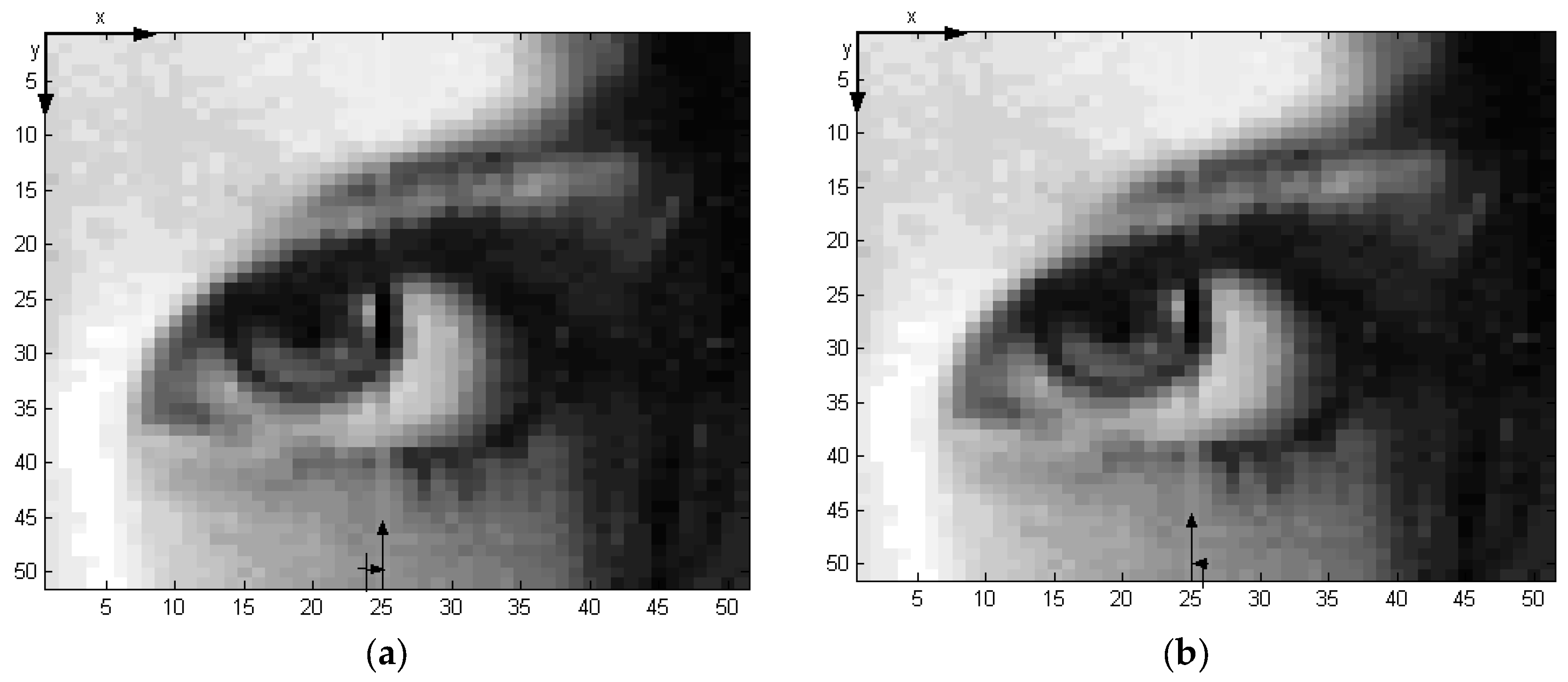
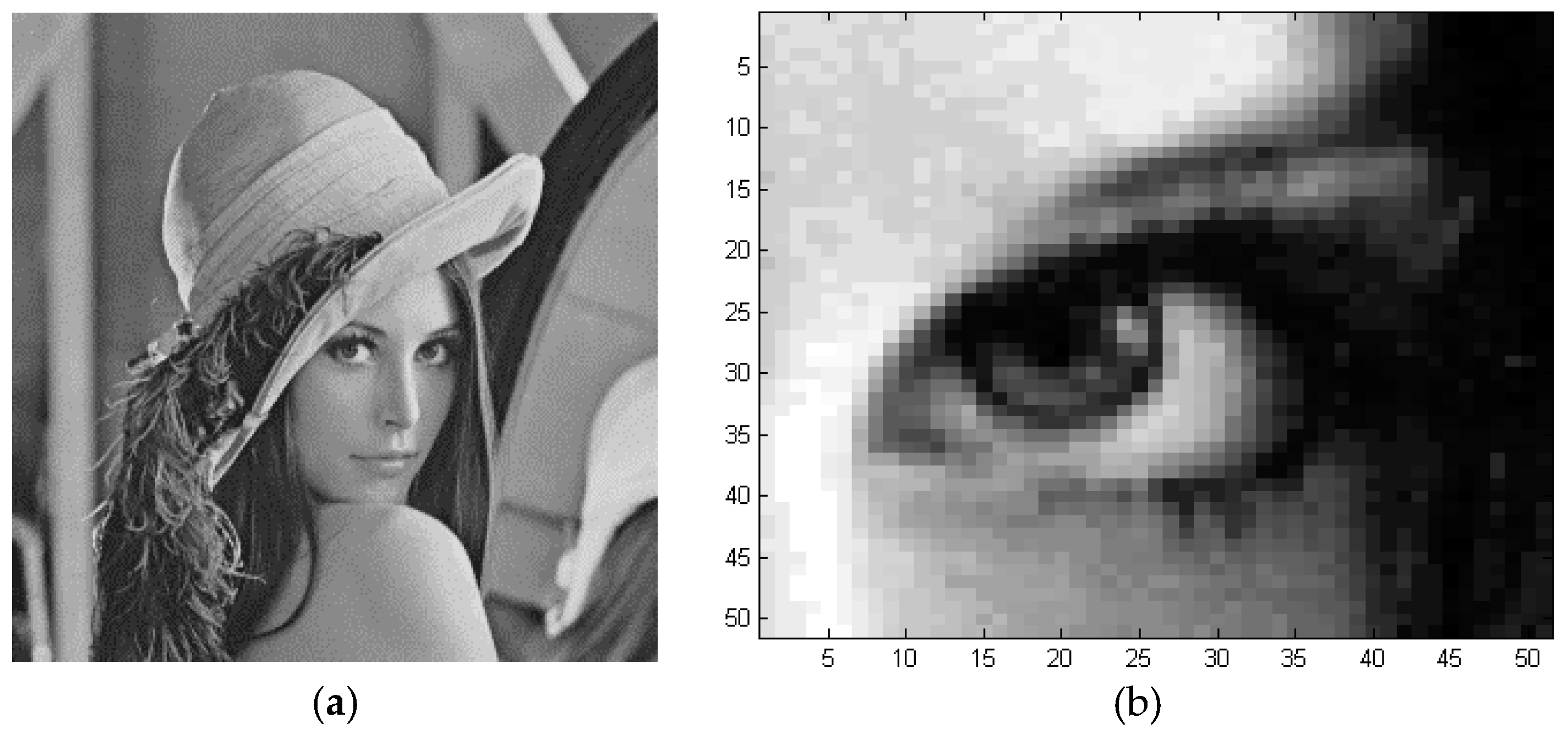
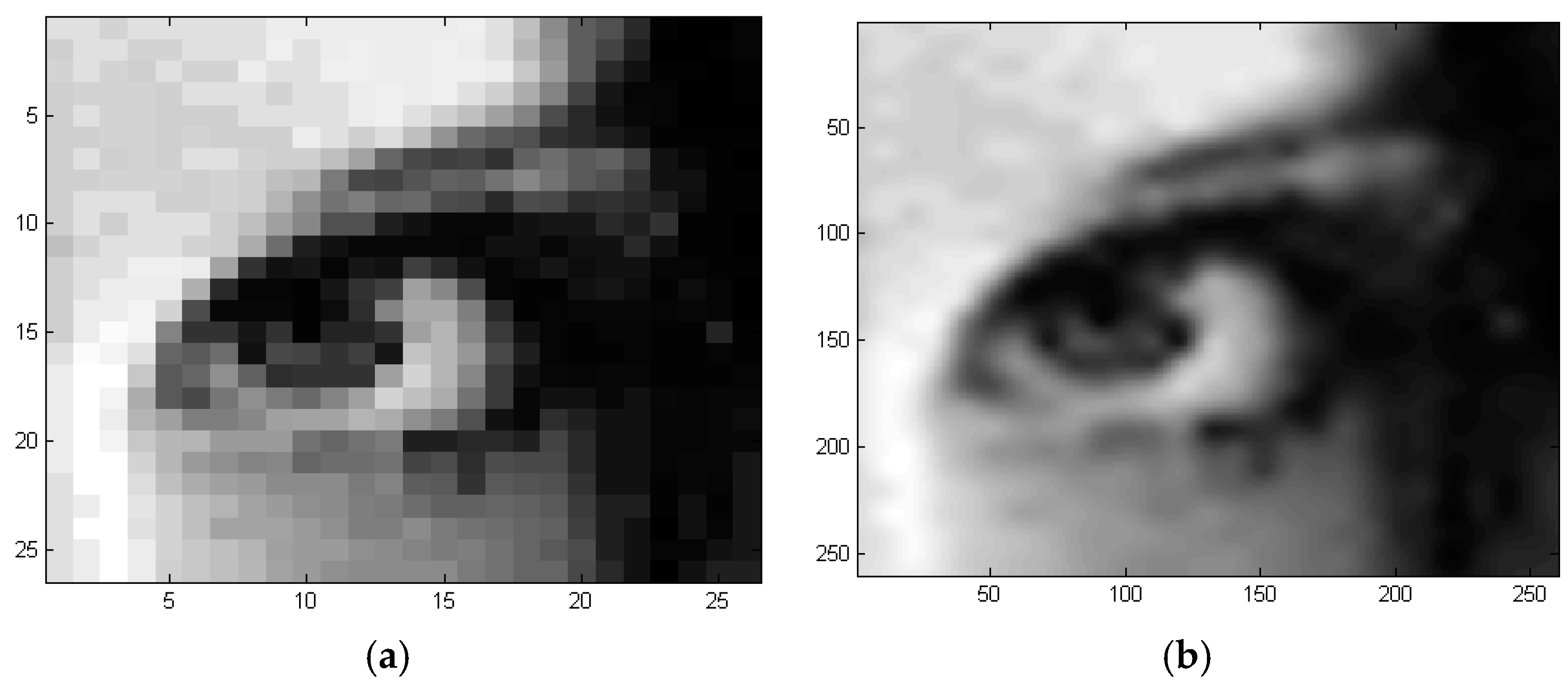
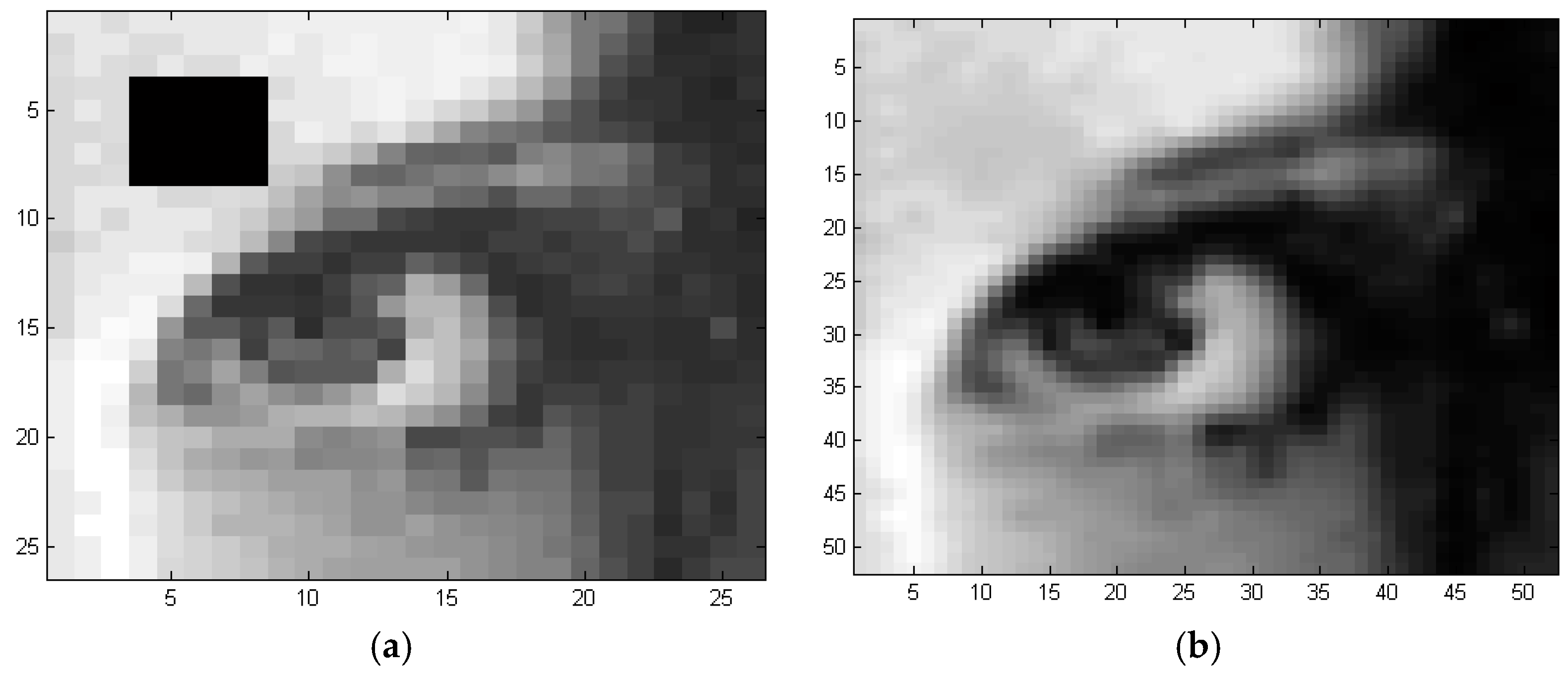
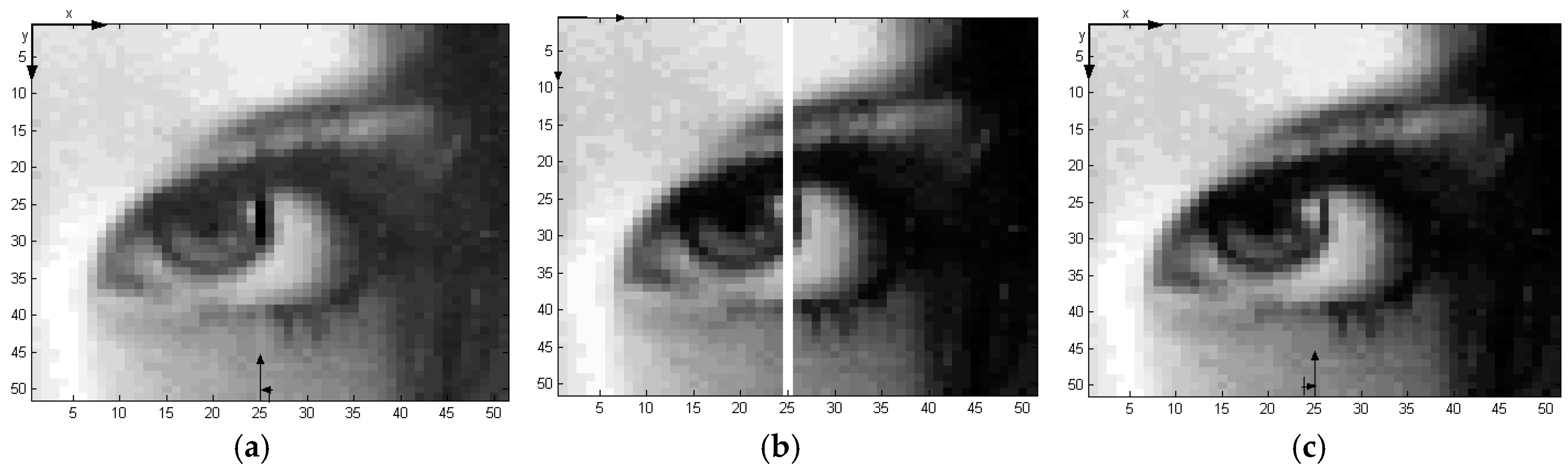
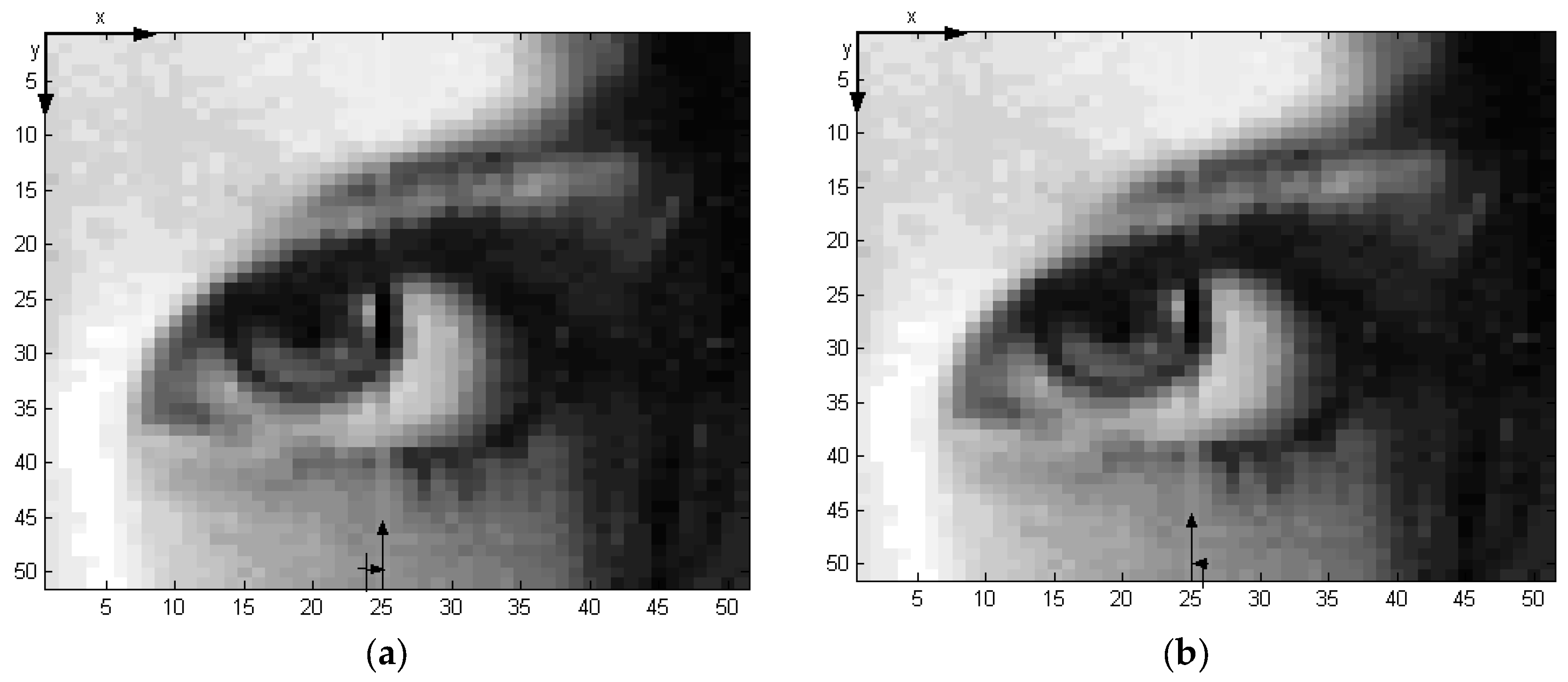
4.2. Visual Enhancement of Grayscale Lenna Image
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Omrani, E.; Tafti, A.P.; Fathi, M.F.; Moghadam, A.D.; Rohatgi, P.; D’Souza, R.M.; Yu, Z. Tribological study in microscale using 3D SEM surface reconstruction. Tribol. Int. 2016, 103, 309–315. [Google Scholar] [CrossRef]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Graphics Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, R.; Zhou, L. Model reconstruction from cloud data. J. Mater. Process. Technol. 2003, 138, 494–498. [Google Scholar] [CrossRef]
- Kašpar, R.; Zitová, B. Weighted thin-plate spline image denoising. Pattern Recognit. 2003, 36, 3027–3030. [Google Scholar] [CrossRef]
- Mayyas, M.; Shiakolas, P.S. Micro-Surface Construction and Characterization From Digital Elevation Model Using Thin Plate Splines in Matlab Environment. In Proceedings of the ASME 2006 International Mechanical Engineering Congress and Exposition, Chicago, IL, USA, 5–10 November 2006; pp. 1105–1112.
- Algarni, D.A. Comparison of thin plate spline, polynomial, C I—Function and Shepard’s interpolation techniques with GPS-derived DEM. Int. J. Appl. Earth Obs. Geoinform. 2001, 3, 155–161. [Google Scholar] [CrossRef]
- Yu, Z. Surface interpolation from irregularly distributed points using surface splines, with Fortran program. Comput. Geosci. 2001, 27, 877–882. [Google Scholar] [CrossRef]
- Wang, G.; Qi, J. PET image reconstruction using kernel method. IEEE Trans. Med. Imaging 2015, 34, 61–71. [Google Scholar] [CrossRef] [PubMed]
- Raj, D.; Mamoria, P. Image Enhancement Techniques in the Spatial Domain: An Overview. IUP J. Comput. Sci. 2015, 9, 46. [Google Scholar]
- Gobbi, D.G.; Peters, T.M. Generalized 3D nonlinear transformations for medical imaging: An object-oriented implementation in VTK. Comput. Med. Imaging Graphics 2003, 27, 255–265. [Google Scholar] [CrossRef]
- Fornefett, M.; Rohr, K.; Stiehl, H.S. Radial basis functions with compact support for elastic registration of medical images. Image Vis. Comput. 2001, 19, 87–96. [Google Scholar] [CrossRef]
- Fornefett, M.; Rohr, K.; Stiehl, H.S. Elastic registration of medical images using radial basis functions with compact support. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Fort Collins, CO, USA, 23–25 June 1999.
- Barrodale, I.; Skea, D.; Berkley, M.; Kuwahara, R.; Poeckert, R. Warping digital images using thin plate splines. Pattern Recognit. 1993, 26, 375–376. [Google Scholar] [CrossRef]
- Lapeer, R.; Prager, R. 3D shape recovery of a newborn skull using thin-plate splines. Comput. Med. Imaging Graphics 2000, 24, 193–204. [Google Scholar] [CrossRef]
- Mayyas, M.; Shiakolas, P.S. Application of Thin Plate Splines for Surface Reverse Engineering and Compensation for Femtosecond Laser Micromachining. In Proceedings of the Intelligent Control, IEEE International Symposium on, Mediterrean Conference on Control and Automation, Limassol, Cyprus, 27–29 June 2005; pp. 125–130.
- Wejrzanowski, T.; Pielaszek, R.; Opalińska, A.; Matysiak, H.; Łojkowski, W.; Kurzydłowski, K. Quantitative methods for nanopowders characterization. Appl. Surf. Sci. 2006, 253, 204–208. [Google Scholar] [CrossRef]
- Mayyas, M.A.; Shiakolas, P.S. Microsurface Reverse Engineering and Compensation for Laser Micromachining. IEEE Trans. Autom. Sci. Eng. 2009, 6, 291–301. [Google Scholar] [CrossRef]
- Podsiadlo, P.; Stachowiak, G. Scale-invariant analysis of wear particle morphology—A preliminary study. Tribol. Int. 2000, 33, 289–295. [Google Scholar] [CrossRef]
- Joshi, A.A.; Shattuck, D.W.; Thompson, P.M.; Leahy, R.M. Registration of cortical surfaces using sulcal landmarks for group analysis of meg data. In International Congress Series; Elsevier: Amsterdam, The Netherlands, 2007; pp. 229–232. [Google Scholar]
- Joyeux, L.; Boukir, S.; Besserer, B.; Buisson, O. Reconstruction of degraded image sequences. Application to film restoration. Image Vision Comput. 2001, 19, 503–516. [Google Scholar] [CrossRef]
- Kaltenbacher, E.A.; Hardie, R.C. High-resolution infrared image reconstruction using multiple low-resolution aliased frames. In Proceedings of the Aerospace/Defense Sensing and Controls, Orlando, FL, USA, 8 April 1996; pp. 142–152.
- Bouzouba, K.; Radouane, L. Image identification and estimation using the maximum entropy principle. Pattern Recognit. Lett. 2000, 21, 691–700. [Google Scholar] [CrossRef]
- The MathWorks, Inc. MATLAB 8.5. Available online: www.mathworks.com (accessed on 14 September 2016).
- Businger, P.; Golub, G.H. Linear least squares solutions by Householder transformations. Numer. Math. 1965, 7, 269–276. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Gu, M. Fast and stable algorithms for banded plus semiseparable systems of linear equations. SIAM J. Matrix Anal. Appl. 2003, 25, 373–384. [Google Scholar] [CrossRef]
- Panchal, P.; Panchal, S.; Shah, S. A comparison of SIFT and SURF. Int. J. Innov. Res. Comput. Commun. Eng. 2013, 1, 323–327. [Google Scholar]
- Shah, U.; Mistry, D.; Patel, Y. Survey of Feature Points Detection and Matching using SURF, SIFT and PCA-SIFT. J. Emerg. Technol. Innov. Res. 2014, 1, 35–41. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; p. 50.
- Rezai-Rad, G.; Aghababaie, M. Comparison of SUSAN and sobel edge detection in MRI images for feature extraction. In Proceedings of the 2nd Internationl Conference on Information and Communication Technologies ICTTA’06, Damascus, Syria, 24–28 April 2006; pp. 1103–1107.
- Sobel, N.; Prabhakaran, V.; Desmond, J.; Glover, G.; Sullivan, E.; Gabrieli, J. A method for functional magnetic resonance imaging of olfaction. J. Neurosci. Methods 1997, 78, 115–123. [Google Scholar] [CrossRef]
- Pogue, B.W.; McBride, T.O.; Prewitt, J.; Österberg, U.L.; Paulsen, K.D. Spatially variant regularization improves diffuse optical tomography. Appl. Opt. 1999, 38, 2950–2961. [Google Scholar] [CrossRef] [PubMed]
- Natterer, F. Mathematical Methods in Image Reconstruction; Society of Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2001. [Google Scholar]
- Franconi, L.; Jennison, C. Comparison of a genetic algorithm and simulated annealing in an application to statistical image reconstruction. Stat. Comput. 1997, 7, 193–207. [Google Scholar] [CrossRef]
- Zhou, Y.-T.; Chellappa, R.; Vaid, A.; Jenkins, B.K. Image restoration using a neural network. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 1141–1151. [Google Scholar] [CrossRef]
- Egmont-Petersen, M.; de Ridder, D.; Handels, H. Image processing with neural networks—A review. Pattern Recognit. 2002, 35, 2279–2301. [Google Scholar] [CrossRef]
- Wang, J.-H.; Liu, W.-J.; Lin, L.-D. Histogram-based fuzzy filter for image restoration. IEEE Trans. Syst. Man Cybern. B: Cybern. 2002, 32, 230–238. [Google Scholar] [CrossRef] [PubMed]
- Serry, F.; Stout, T.; Zecchino, M. 3D MEMS Metrology with Optical Profilers; Veeco Instruments Inc.: Tucson, AZ, USA, 2006. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Evan, B. Blind measurement of blocking artifacts in images. In Proceedings of the International Conference on Image Processing, Vancouver, BC, Canada, 10–13 September 2000; pp. 981–984.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ɛ | 10−6 | 10−5 | 10−4 | 10−3 | 10−2 | 10−1 | 1 | 10 | 100 |
|---|---|---|---|---|---|---|---|---|---|
| 363.5187 | 363.5192 | 363.5243 | 363.5745 | 364.0648 | 368.0492 | 381.5303 | 392.1309 | 77852.1 |
| Method | Ϙ | † |
|---|---|---|
| DEM: 100 × 100 Pixel2 | 15.1 | - |
| DEM: 50 × 50 Pixel2 | 14.9 | - |
| Interpolation, Modified TPS with ɛ = 10−6 ** | 16.4 | 363.57 |
| Interpolation, linear method ** | 15.4 | 2767.75 |
| Interpolation, cubic method ** | 15.7 | 2799.50 |
| Interpolation, nearest method ** | 14.9 | 2825.00 |
| Interpolation, spline method ** | 16.2 | 2829.80 |
| Resolution Enhancement (Pixel2) Interpolation by Modified TPS with ε = 10−6 * | SNR ω |
|---|---|
| 50 × 50 Pixel2 | 14.90 |
| Pixel2 | 16.39 |
| Pixel2 | 16.56 |
| Pixel2 | 16.60 |
| Pixel2 | 16.67 |
| Method | Description |
|---|---|
| SIFT | The method uses corner detection algorithm, image matching, affine deformation, viewpoint change, noise, and illumination changes [26]. It shows stability in scale and rotation, robustness to localization error, and reduces the time and computational complexity of images [27]. |
| Harris Corner Detector | The method is based on the local auto-correlation function of a signal particularly to detect gray scale image location that has large gradients in all directions at a predetermined scale. The method has good consistency on natural imagery [28]. |
| SUSAN | The method is based on non-linear filtering, and it associates each pixel of the image a small area of similar brightness from neighboring pixels. It is used as edge finder [29]. |
| SURF | The method is based on multiscale space theory and feature detection by using Hessian matrix, which has good performance and accuracy [26], but needs further improvement when the rotation is large [27]. |
| This Study | Our method uses density information of the extracted features, which is incorporated to regularize the overall energy function to reduce the impact from outliers. It is based on corner detection using local or global properties, which is an effective tool to implement the registration of local image parts, especially when the key points are evenly distributed across the whole image. |
| Method | Description |
|---|---|
| Spatial Filtering Method | Typically, smoothing filters are used for blurring and for noise reduction. Sharpening of the image is done by spatial differentiation which enhances edges and other discontinuities and de-emphasizes areas with slowly varying intensities [9]. Example of spatial methods include the Sobel Method [30], Prewitt Method [31], and Laplacian method [32]. |
| Genetic Algorithm | The method is a stochastic optimization algorithm that is based on four steps: selection, crossover, mutation and fitness function [33]. A genetic algorithm needs less information to solve any problem as compared to conventional optimization methods. |
| Neural Network Method | Restoration is carried out by parameter evaluation and image construction procedure using learning BP neural network to determine the best image transform function [34]. Neural Network is used to remove noise, motion blur, out-of-focus blur, and distortion caused by low-resolution images [35]. |
| Fuzzy Method | Used to handle uncertainty to enhance contrast of the images and to remove unclearness in edges, boundaries, regions and features of image [36]. |
| This study | We described modified TPS methods, which are based on the original pixel intensity values to evaluate model parameter based on logarithmic RBFs of bending surface of minimum deformation. The model can restore selected areas or entire image, and it is suitable to increase the image resolution, and restore lost information. We combined TPS and LSE in a windowing technique to improve the computation time of reconstruction. |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayyas, M. Image Reconstruction and Evaluation: Applications on Micro-Surfaces and Lenna Image Representation. J. Imaging 2016, 2, 27. https://doi.org/10.3390/jimaging2030027
Mayyas M. Image Reconstruction and Evaluation: Applications on Micro-Surfaces and Lenna Image Representation. Journal of Imaging. 2016; 2(3):27. https://doi.org/10.3390/jimaging2030027
Chicago/Turabian StyleMayyas, Mohammad. 2016. "Image Reconstruction and Evaluation: Applications on Micro-Surfaces and Lenna Image Representation" Journal of Imaging 2, no. 3: 27. https://doi.org/10.3390/jimaging2030027
APA StyleMayyas, M. (2016). Image Reconstruction and Evaluation: Applications on Micro-Surfaces and Lenna Image Representation. Journal of Imaging, 2(3), 27. https://doi.org/10.3390/jimaging2030027