
Influence of Target Surface BRDF on Non-Line-of-Sight Imaging


Abstract
1. Introduction
2. Materials and Methods
2.1. BRDF Definition and Principle
2.2. Diffusion Equation
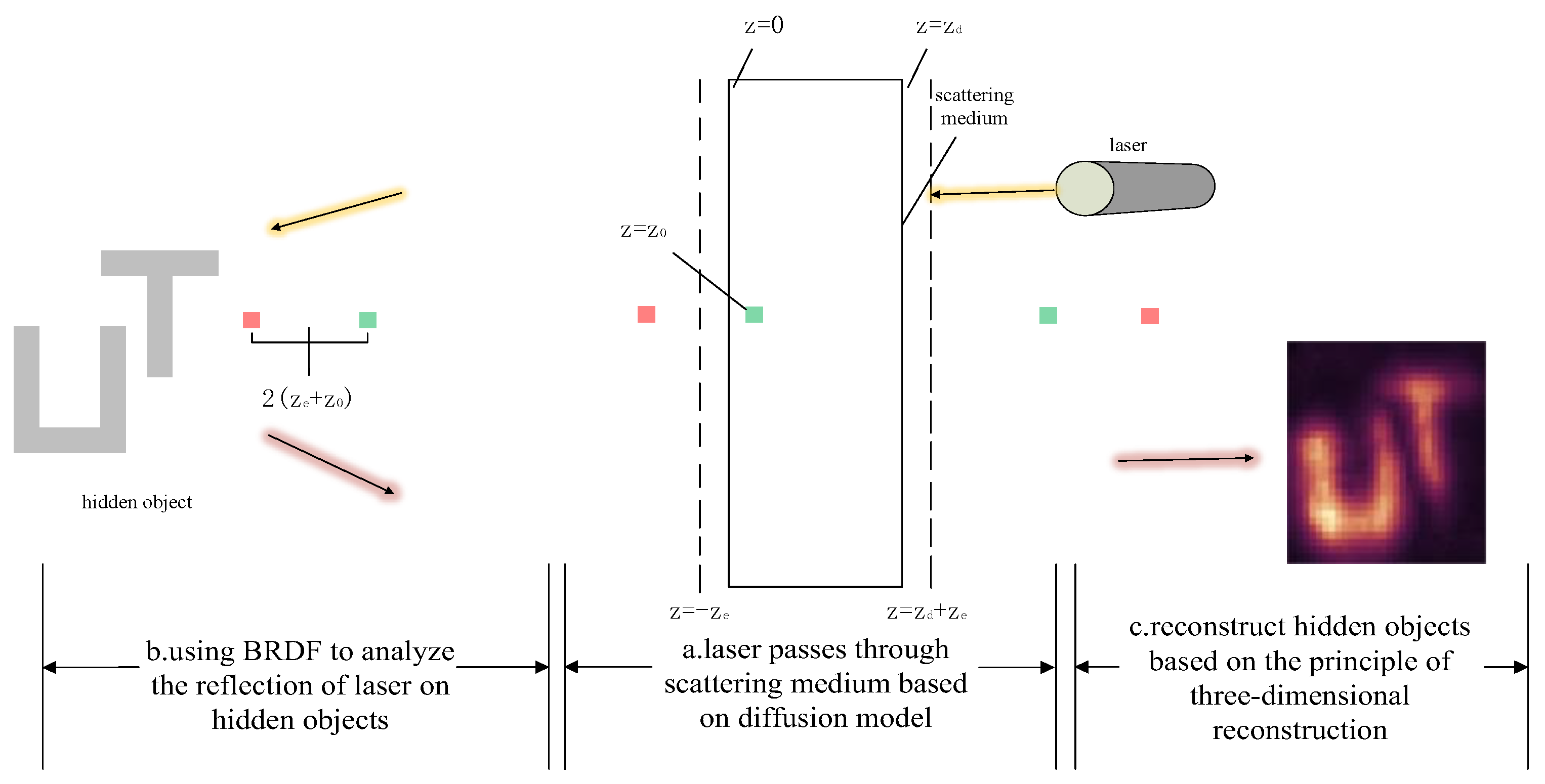
2.3. Imaging Model
3. Results
3.1. Deep Neural Network Target BRDF Model Construction
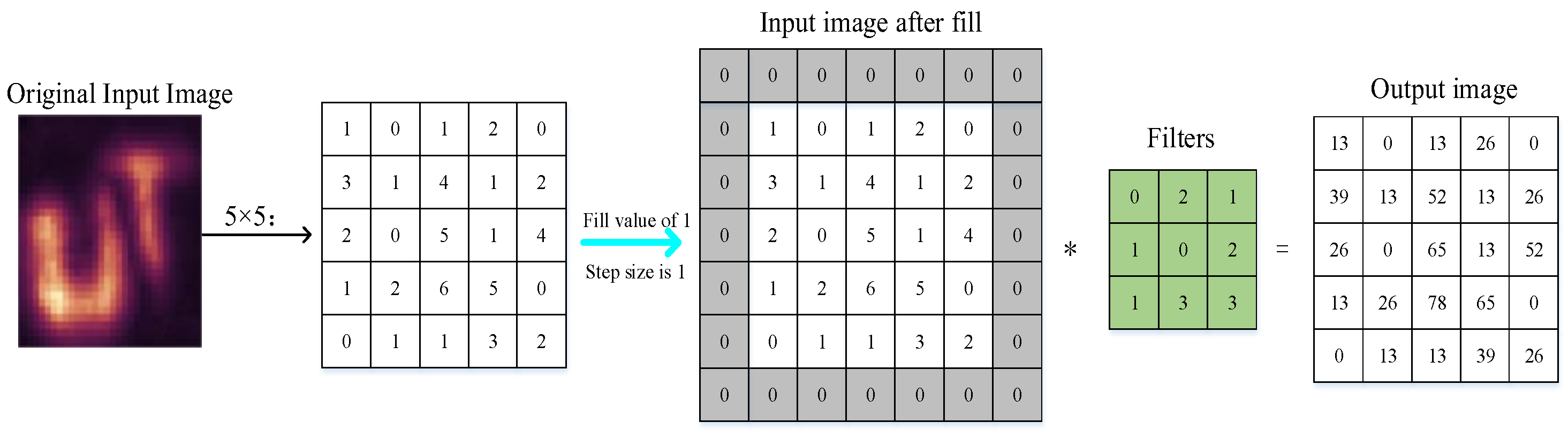
3.2. Target Imaging Classification Based on Deep Learning
4. Analysis of Results
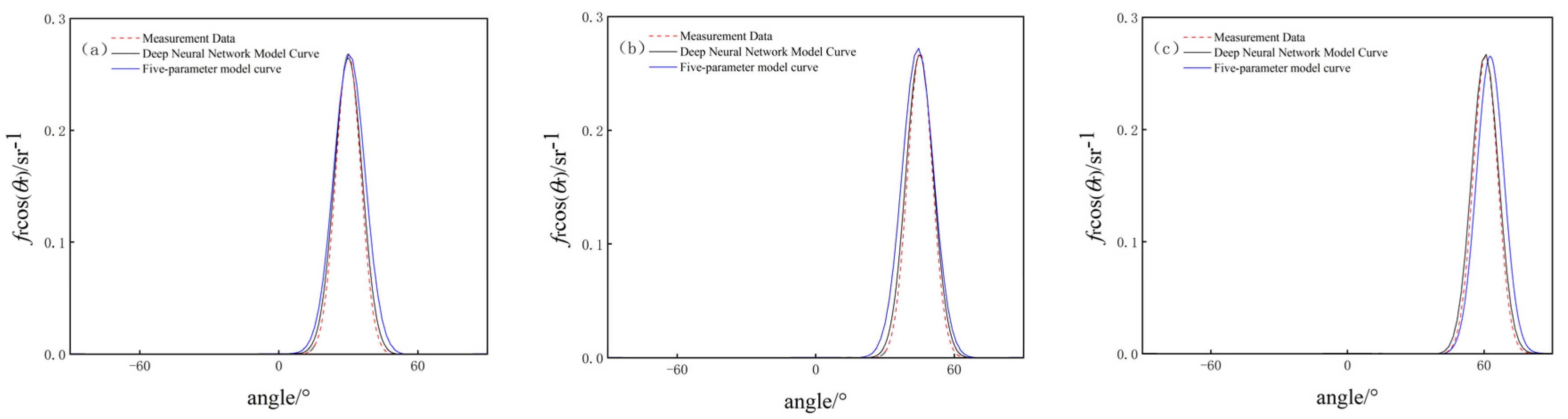
4.1. BRDF Model Validation Analysis
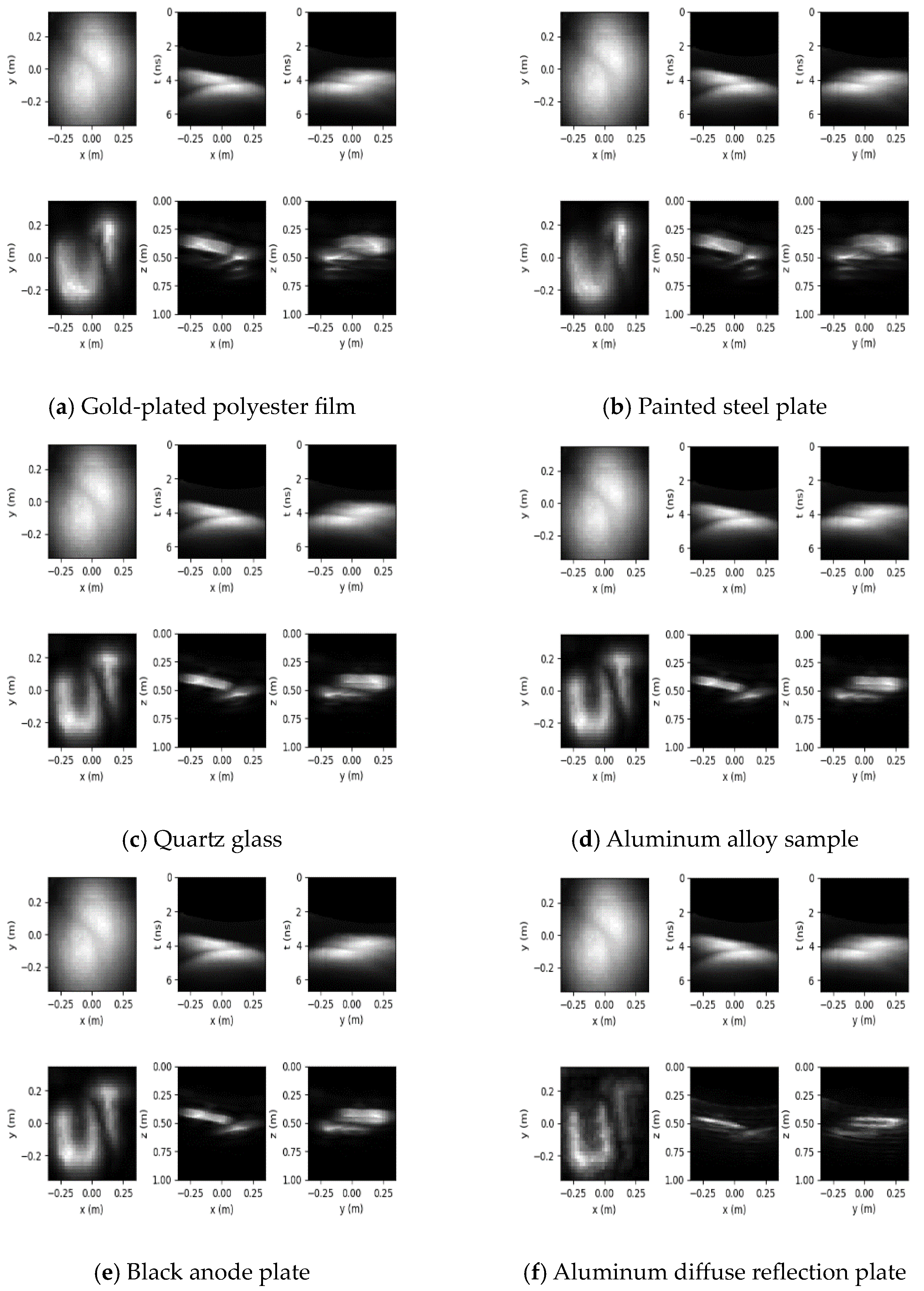
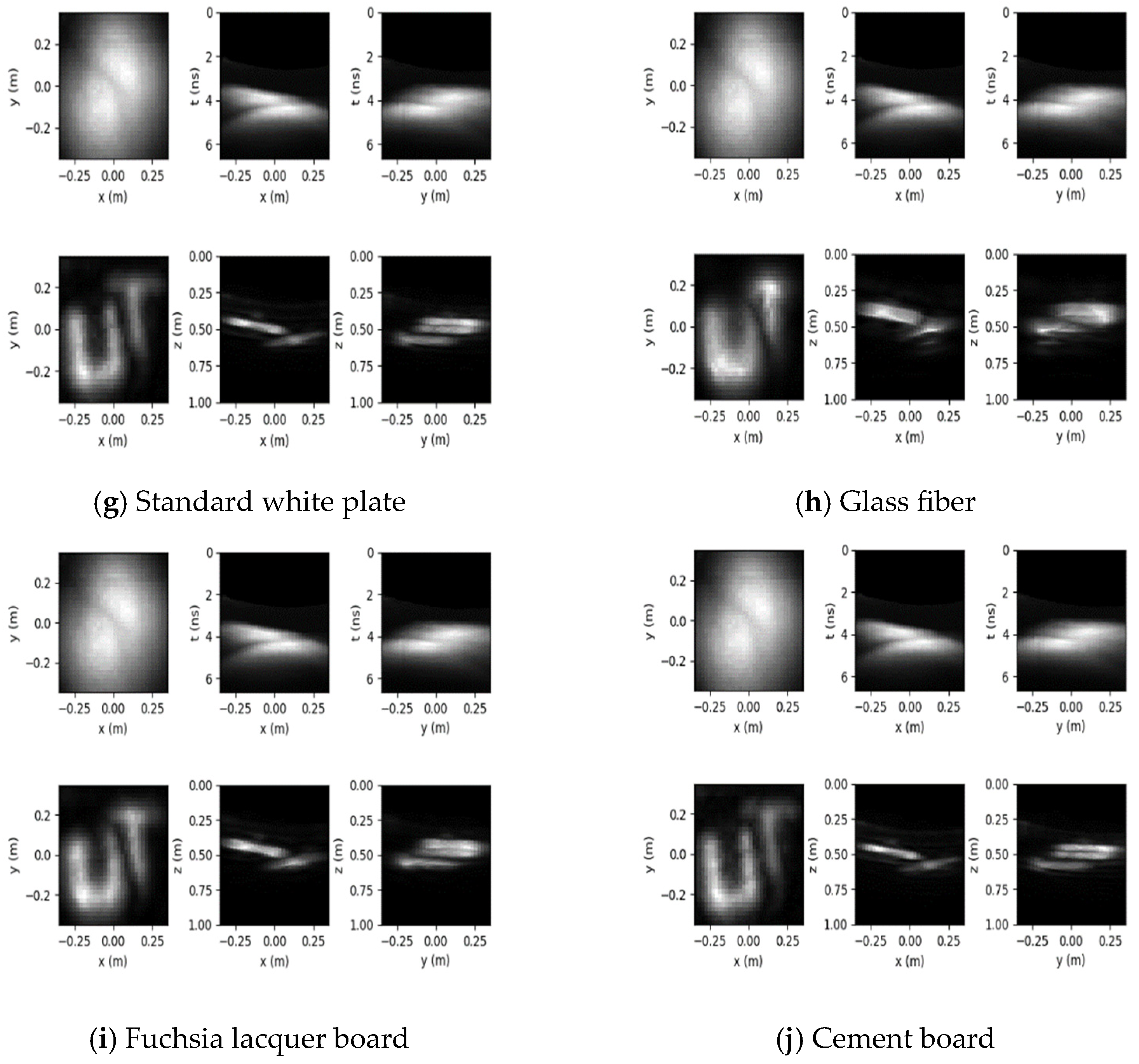
4.2. Target CDT Imaging Reconstruction
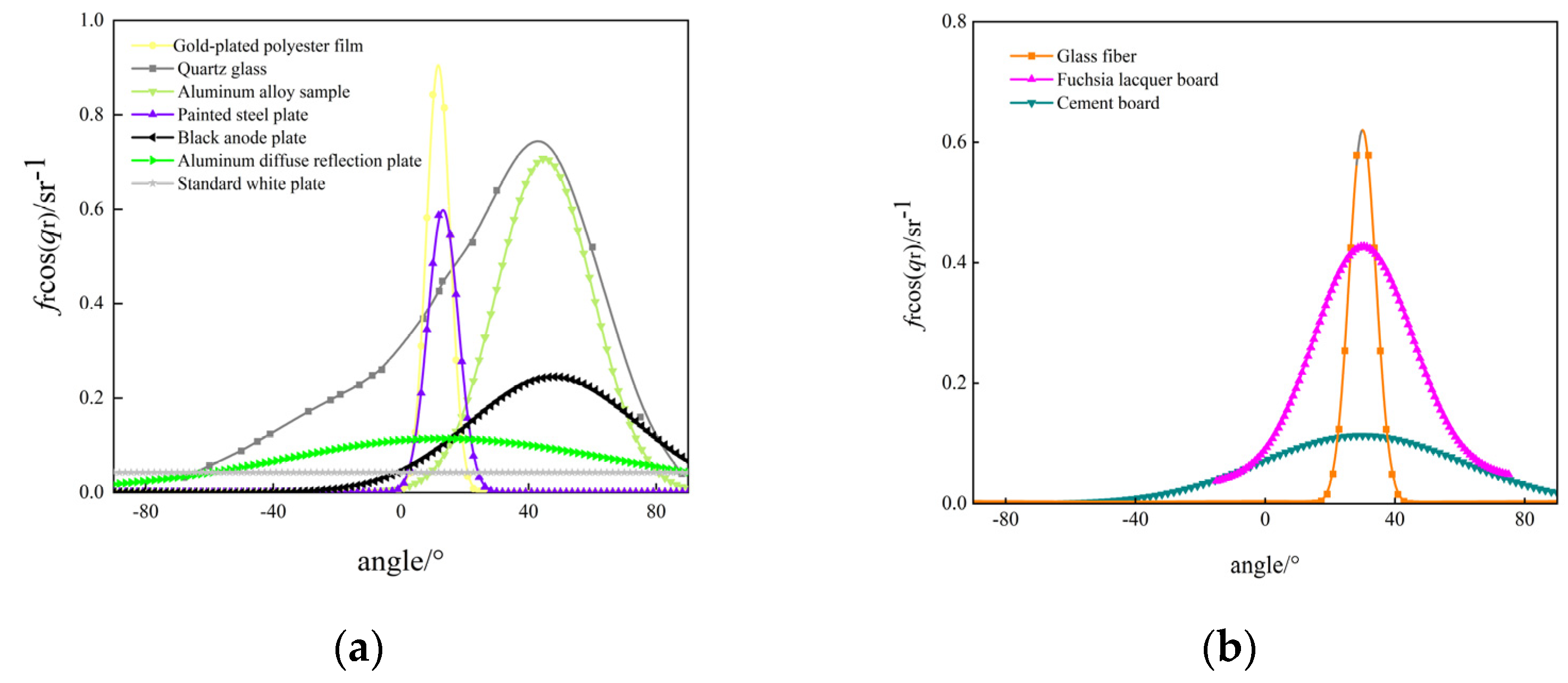
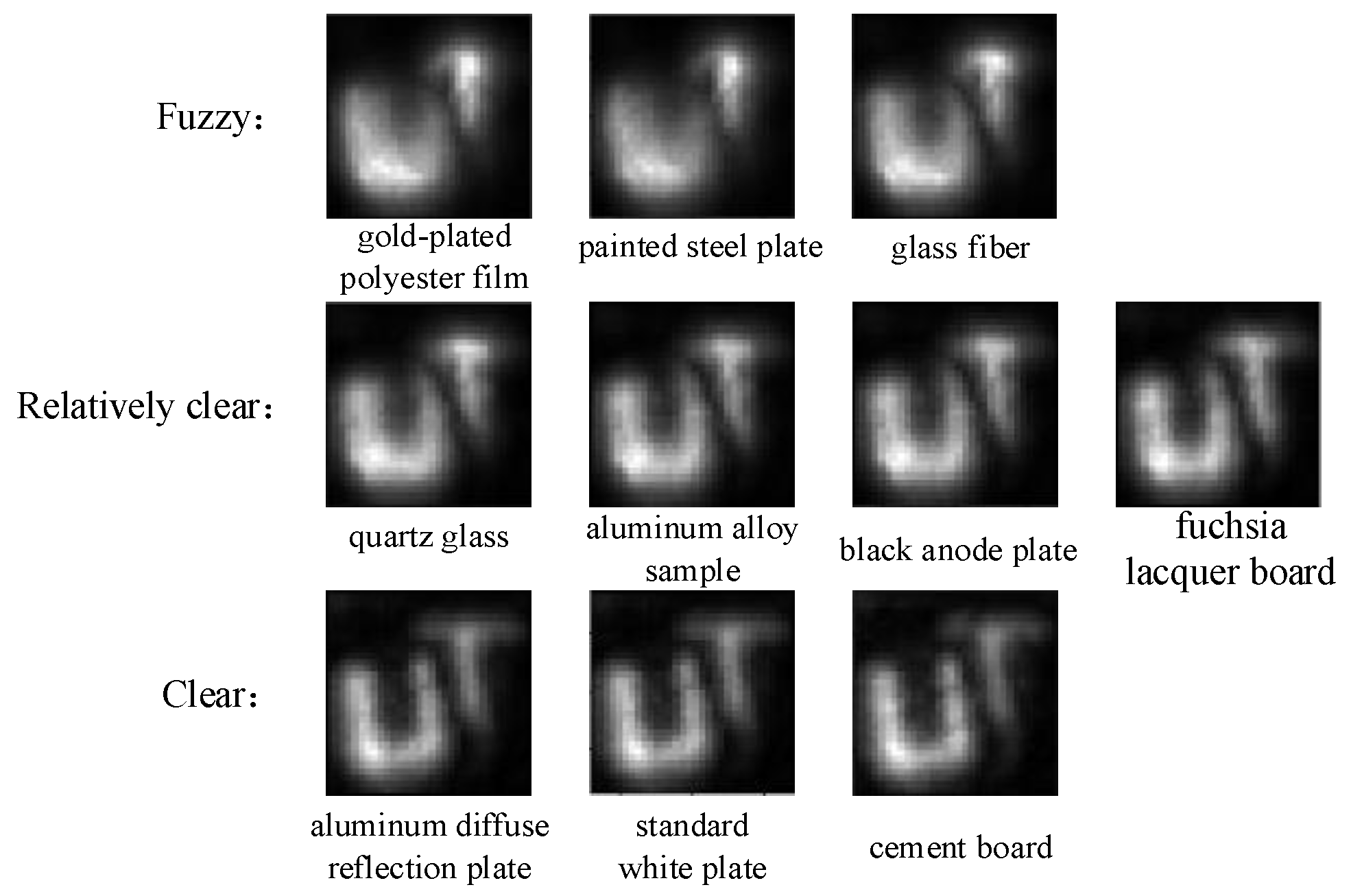
4.3. Imaging Classification of Different BRDF Surface Targets
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Faccio, D.; Velten, A.; Wetzstein, G. Non-line-of-sight imaging. Nature 2020, 2, 318–327. [Google Scholar] [CrossRef]
- Velten, A.; Willwacher, T.; Gupta, O.; Veeraraghavan, A.; Bawendi, M.G.; Raskar, R. Recovering three-dimensional shape around a corner using ultrafast time-of-flight imaging. Nat. Commun. 2012, 3, 745. [Google Scholar] [CrossRef] [PubMed]
- Maeda, T.; Satat, G.; Swedish, T.; Sinha, L.; Raskar, R. Recent advances in imaging around corners. arXiv 2019, arXiv:1910.05613. [Google Scholar]
- Toole, O.M.; Lindell, D.B.; Wetzstein, G. Confocal non-line-of-sight imaging based on the light-cone transform. Nature 2018, 555, 338. [Google Scholar] [CrossRef]
- Lindell, D.B.; Wetzstein, G. Three-dimensional imaging through scattering media based on confocal diffuse tomography. Nat. Commun. 2020, 11, 4517. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.-T.; Huang, X.; Li, Z.-P.; Xu, F. Compressed sensing for active non-line-of-sight imaging. Opt. Express 2021, 29, 1749–1763. [Google Scholar] [CrossRef] [PubMed]
- Pei, C.; Zhang, A.; Deng, Y.; Xu, F.; Wu, J.; Li, D.U.-L.; Qiao, H.; Fang, L.; Dai, Q. Dynamic non-line-of-sight imaging system based on the optimization of point spread functions. Opt. Express 2021, 29, 32349. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Li, Y.; Zhang, Y.; Xiong, Z. Generalizable Non-Line-of-Sight Imaging with Learnable Physical Priors. arXiv 2024, arXiv:2409.14011. [Google Scholar] [CrossRef]
- Zhensen, W.; Suomin, C. Bistatic scattering by arbitrarily shaped objects with rough surface at optical and infrared frequencies. Int. J. Infrared Millim. Waves 1992, 13, 537–549. [Google Scholar] [CrossRef]
- Warren, S.G.; Grenfell, T.C.; Mullen, P.C. Effect of Surface Roughness on Remote Sensing of Snow Albedo. Ann. Glaciol. 1987, 9, 242–243. [Google Scholar] [CrossRef]
- Jia, H.; Li, F.T. Bidirectional Reflectance Distribution Function of Aluminium Diffuser at UV Spectral Band. Acta Opt. Sin. 2004, 24, 230. [Google Scholar]
- Yang, Y.F. Reserch on spectral scattering characteristics of complex target. Electron. Meas. Technol. 2018, 41, 99–102. [Google Scholar]
- Phong, B.T. Illumination for computer generated pictures. Commun. ACM 1975, 18, 311–317. [Google Scholar] [CrossRef]
- Wu, Z.S.; Xie, D.H. Modeling Reflectance Function from Rough Surface and Algorithms. Acta Opt. Sin. 2002, 22, 897. [Google Scholar]
- Yang, Y.F.; Wu, Z.S.; Cao, Y. Practical Six-Parameter Bidirectional Reflectance Distribution Function Model for Rough Surface. Acta Opt. Sin. 2012, 32, 0229001. [Google Scholar] [CrossRef]
- Minnaert, M. The reciprocity principle in lunar photometry. Astrophy J. 1941, 93, 403–410. [Google Scholar] [CrossRef]
- Torrance, K.E.; Sparrow, E.M. Off-specular peaks in the directional distribution of reflected thermal radiation. J. Heat Transfer. 1966, 11, 5–9. [Google Scholar] [CrossRef]
- Maxwell, J.R.; Beard, J.; Weiner, S.; Ladd, D.; Ladd, S. Bidirectional Reflectance Model Validation and Utilization; Defense Technical Information Center: Fort Belvoir, VA, USA, 1973. [Google Scholar]
- Fu, Q.; Liu, X.; Yang, D.; Zhan, J.; Liu, Q.; Zhang, S.; Wang, F.; Duan, J.; Li, Y.; Jiang, H. Improvement of pBRDF Model for Target Surface Based on Diffraction and Transmission Effects. Remote Sens. 2023, 15, 3481. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Liu, Y. The measurement and modeling investigation on the spectral polarized BRDF of brass. Opt. Rev. 2020, 27, 380–390. [Google Scholar] [CrossRef]
- Liu, C.; Li, Z.; Xu, C.; Tian, Q. BRDF Model for Commonly Used Materials of Space Targets Based on Deep Neural Network. Acta Opt. Sin. 2017, 37, 1129001. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Scanning area/ | 0.09 |
| Absorption coefficient of the scatterer medium/ | |
| Scattering coefficient of the scatterer medium/ | 2.62 |
| Distance between laser and scanning center/m | 1.3 |
| Pulse repetition rate/MHz | 10 |
| Pulse width of the laser/ps | 35 |
| Wavelength of the pulsed laser/nm | 532 |
| Average power of the pulsed laser/mW | 400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Yang, K.; Zhang, A. Influence of Target Surface BRDF on Non-Line-of-Sight Imaging. J. Imaging 2024, 10, 273. https://doi.org/10.3390/jimaging10110273
Yang Y, Yang K, Zhang A. Influence of Target Surface BRDF on Non-Line-of-Sight Imaging. Journal of Imaging. 2024; 10(11):273. https://doi.org/10.3390/jimaging10110273
Chicago/Turabian StyleYang, Yufeng, Kailei Yang, and Ao Zhang. 2024. "Influence of Target Surface BRDF on Non-Line-of-Sight Imaging" Journal of Imaging 10, no. 11: 273. https://doi.org/10.3390/jimaging10110273
APA StyleYang, Y., Yang, K., & Zhang, A. (2024). Influence of Target Surface BRDF on Non-Line-of-Sight Imaging. Journal of Imaging, 10(11), 273. https://doi.org/10.3390/jimaging10110273