
Estimate e-Golf Battery State Using Diagnostic Data and a Digital Twin


Abstract
1. Introduction
2. Technical Background
2.1. Methods of Battery State Estimation
2.1.1. State of Charge
2.1.2. State of Health
2.1.3. Assess Methods for This Work
2.2. OBD-II Interface
2.3. Digital Twin System
2.4. Battery System of the VW e-Golf
3. Goal and Innovation of This Work
- Digital battery twin: Working towards a digital battery twin, the use case of automotive battery pack online parameter estimation is of crucial importance. Therefore, we want to build on the digital twin paradigm in this work and define an architecture that shapes a modular, cloud-based digital twin. To date, no detailed reference architecture for a digital battery twin in this use case can be found in literature, however, online estimation methods have already been developed, for example, in Karger et al. [28] or Baumann et al. [23].
- State estimation using OBD data: Using battery state estimation as a use case, we want to achieve a cell-individual assessment of the battery system. Being able to apply this method to electric vehicles in use, we want to rely on diagnostic data, which come with certain limitations concerning sample rate and availability. Only limited edge processing can be done in the vehicle, such as decoding the diagnostic data. The novel approach presented here utilizes only standard uds-diagnostic queries to gather data from the whole battery system. Coping with the limited data quality, the most suitable state estimation methods are chosen to be implemented and tested.
- Holistic implementation: Using real driving cycles, we implement and test the chosen methods integrated into the twin system. We develop a pipeline from the car to the cloud, and finally to the user display.
4. Method
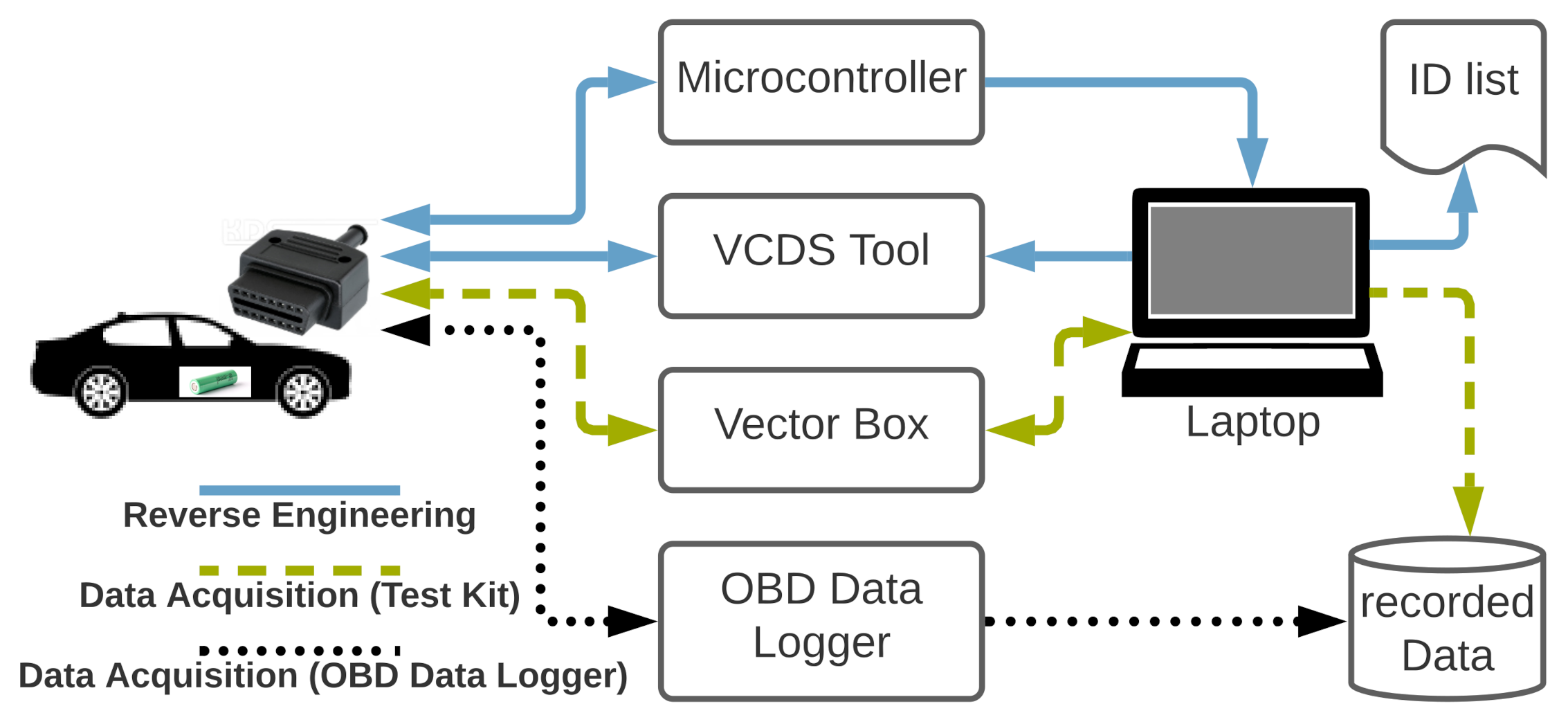
4.1. Diagnostic Interface: Reverse Engineering
4.2. Diagnostic Interface: Data Acquisition
4.2.1. Test Kit
4.2.2. Rotation System
4.2.3. Data Logger
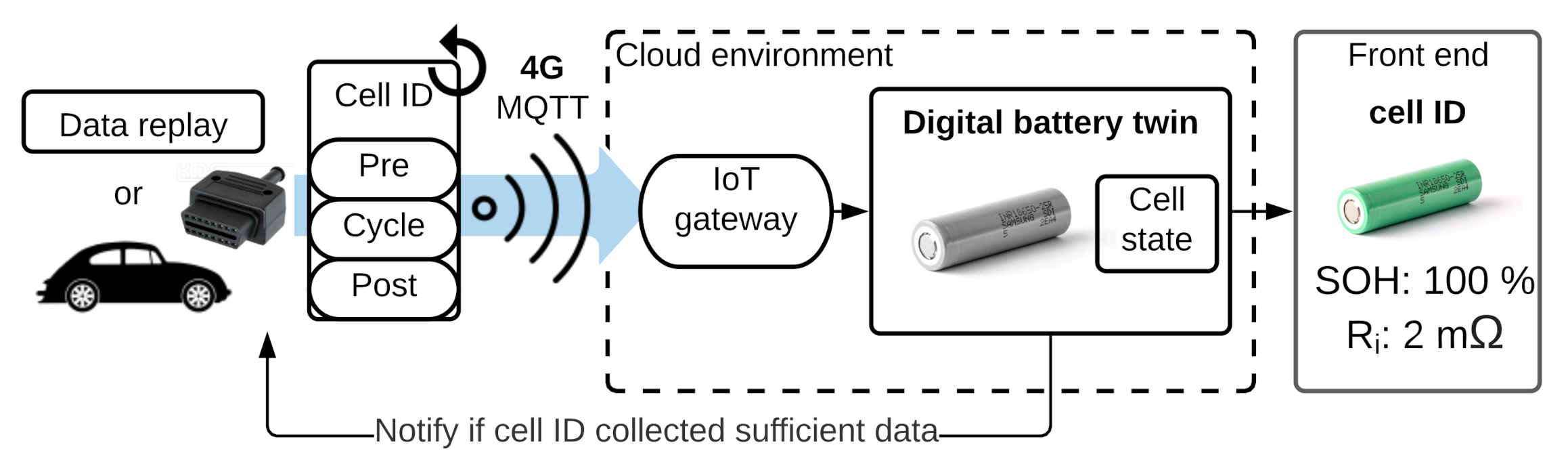
4.2.4. Transfer to Cloud
4.3. Analysis
4.3.1. Estimating Capacity
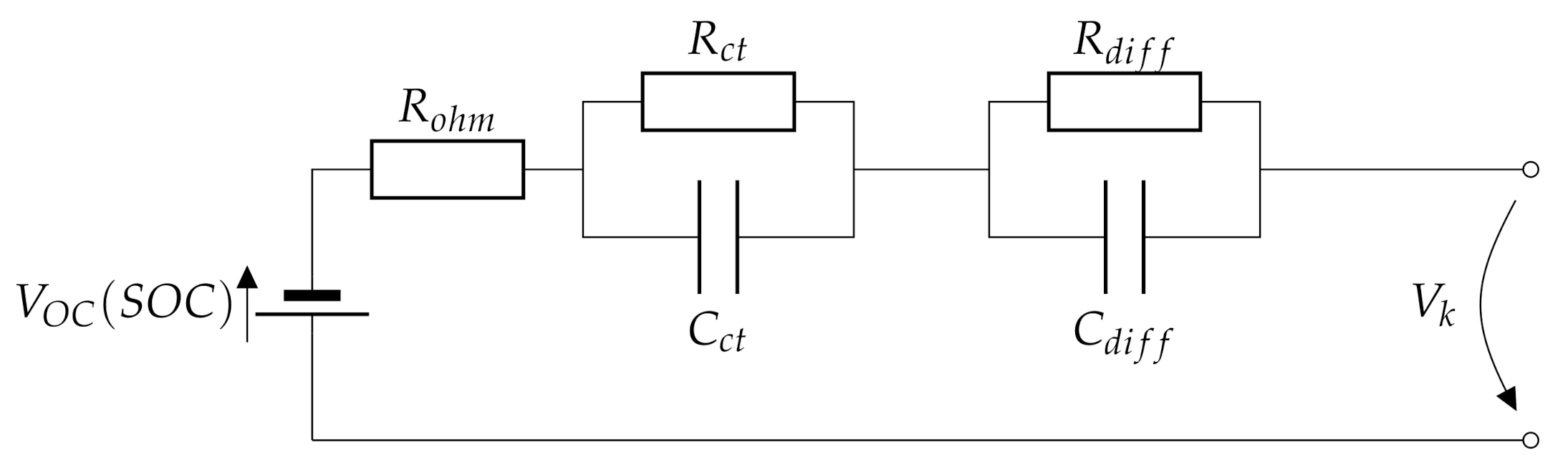
4.3.2. Estimating Resistance
5. Results
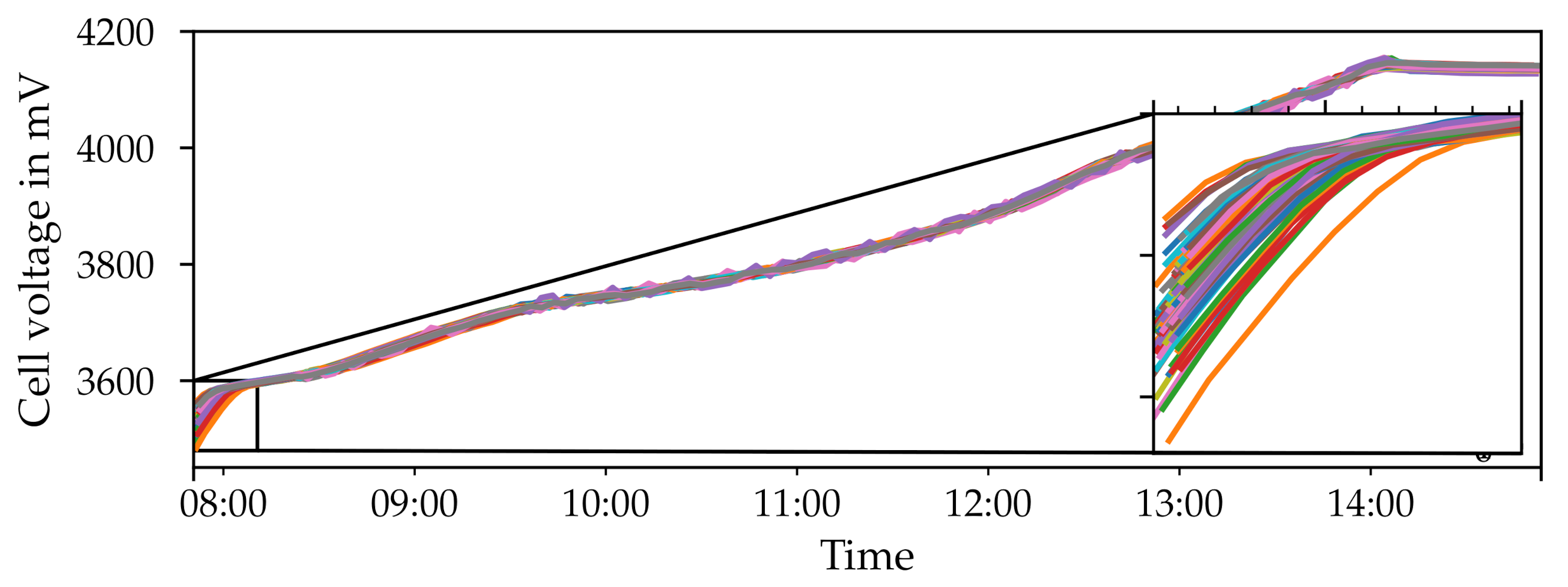
5.1. Data Collected
5.2. Reverse Engineering and Data Logging
5.3. On the Capacity
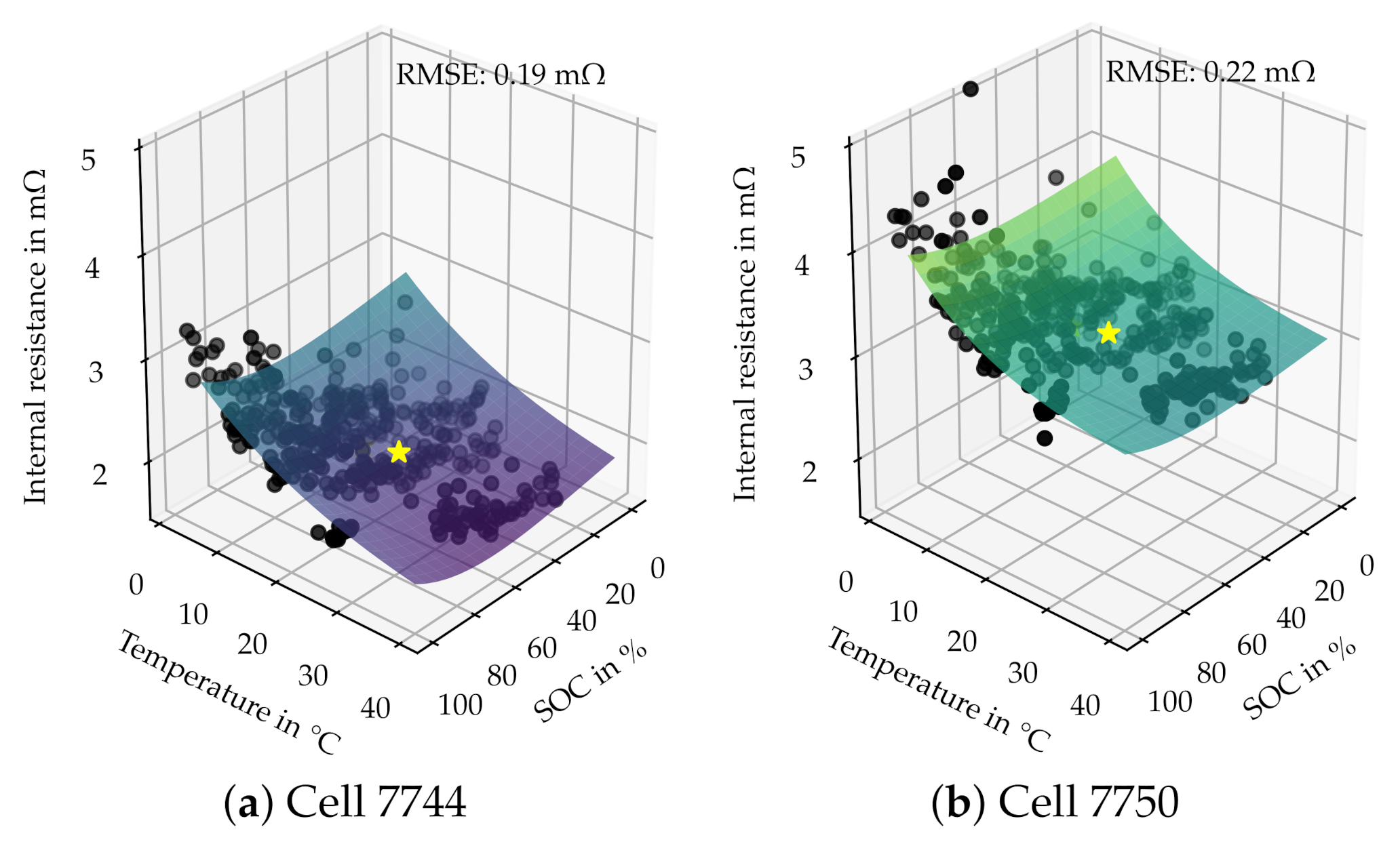
5.4. On the Internal Resistance
5.5. Architecture of the Digital Twin Used
6. Discussion
6.1. State Estimation Using Diagnostic Data
6.2. Digital Twin Architecture
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SOHr | State of health (Resistance) |
| SOHc | State of health (Capacity) |
| SOH | State of Health |
| SAAS | Software as a service |
| IAAS | Infrastructure as a service |
| paas | Platform as a service |
| API | Application programming interface |
| API | Application programming interfaces |
| dod | Depth of discharge |
| INL | Idaho National Laboratory |
| uds | Unified diagnostic services |
| OCV | Open circuit voltage |
| ECM | Equivalent circuit model |
| AWS | Amazon Web Services |
| OBD | On-board diagnosis |
| SOC | State of charge |
| EOL | End of life |
| BOL | Begin of life |
| RMSE | Root mean squared error |
| isotp | ISO 15765-2 Transport protocol for automotive bus systems |
| gnss | Global navigation satellite system |
| MQTT | Message queuing telemetry transport |
| iot | Internet of things |
| kde | Kernel density estimation |
| OEM | Original equipment manufacturers |
| BEV | Battery electric vehicle |
| HEV | Hybrid electric vehicle |
| bms | Battery management system |
References
- Europäische Union. Verordnung (EU) 2019/631 des Europäischen Parlaments und des Rates vom 17. April 2019 zur Festsetzung von CO2-Emissionsnormen für neue Personenkraftwagen und für neue Leichte Nutzfahrzeuge und zur Aufhebung der Verordnungen (EG) Nr. 443/2009 und (EU) Nr. 510/2011: (EU) 2019/631. Available online: https://eur-lex.europa.eu/legal-content/DE/TXT/PDF/?uri=CELEX:32019R0631&from=ES (accessed on 5 December 2020).
- Küpper, D.; Kuhlmann, K.; Wolf, S.; Pieper, C.; Xu, G.; Ahmad, J. The Future of Battery Production in Electric Vehicles. Available online: https://www.bcg.com/publications/2018/future-battery-production-electric-vehicles (accessed on 5 December 2020).
- Korthauer, R. (Ed.) Handbuch Lithium-Ionen-Batterien; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Li, B.; Bei, S. Estimation algorithm research for lithium battery SOC in electric vehicles based on adaptive unscented Kalman filter. Neural Comput. Appl. 2019, 31, 8171–8183. [Google Scholar] [CrossRef]
- Pattipati, B.; Balasingam, B.; Avvari, G.V.; Pattipati, K.R.; Bar-Shalom, Y. Open circuit voltage characterization of lithium-ion batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Jeon, S.; Yun, J.J.; Bae, S. Comparative study on the battery state-of-charge estimation method. Indian J. Sci. Technol. 2015, 8, 1–6. [Google Scholar] [CrossRef]
- Windarko, N.A.; Choi, J. LiPB battery soc estimation using extended Kalman filter improved with variation of single dominant parameter. J. Power Electron. 2012, 12, 40–48. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar] [CrossRef]
- Brill, M. Entwicklung und Implementierung einer neuen Onboard-Diagnosemethode für Lithium-Ionen-Fahrzeugbatterien: Dissertation; Verkehrstechnik/Fahrzeugtechnik; VDI Verlag GmbH: Düsseldorf, Germany, 2012; Volume 755. [Google Scholar]
- Roscher, M. Zustandserkennung von LiFePO4-Batterien für Hybrid- und Elektrofahrzeuge: Dissertation; Aachener Beiträge des ISEA; Shaker Verlag: Aachen, Germany, 2011; Volume 54. [Google Scholar]
- Shah, F.A.; Shahzad Sheikh, S.; Mir, U.I.; Owais Athar, S. Battery Health Monitoring for Commercialized Electric Vehicle Batteries: Lithium-Ion. In Proceedings of the 5th International Conference on Power Generation Systems and Renewable Energy Technologies, Istanbul, Turkey, 26–27 August 2019. [Google Scholar] [CrossRef]
- Farmann, A.; Waag, W.; Marongiu, A.; Sauer, D.U. Critical review of on-board capacity estimation techniques for lithium-ion batteries in electric and hybrid electric vehicles. J. Power Sources 2015, 281, 114–130. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; Wang, J.; He, H.; Peng, S.; Pecht, M. Lithium-Ion Battery Health Prognosis Based on a Real Battery Management System Used in Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 4110–4121. [Google Scholar] [CrossRef]
- Klass, V. Battery Health Estimation in Electric Vehicles. Ph.D. Thesis, KTH, Stockholm, Sweden, 2015. Available online: https://www.diva-portal.org/smash/get/diva2:853550/FULLTEXT01.pdf (accessed on 5 December 2020).
- Bohlen, O.; Hammouche, A.; Sauer, D. Impedanzbasierte Zustandsdiagnose fur Energiespeicher in Automobilen. Tech. Mitteilungen 2006, 99, 88–95. Available online: https://www.researchgate.net/publication/260020125_Impedanzbasierte_Zustandsdiagnose_fur_Energiespeicher_in_Automobilen (accessed on 5 December 2020).
- Balagopal, B.; Chow, M.Y. The State of the Art Approaches to Estimate the State of Health (SOH) and State of Function (SOF) of Lithium Ion Batteries. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 1302–1307. [Google Scholar] [CrossRef]
- Zimmermann, W.; Schmidgall, R. Bussysteme in der Fahrzeugtechnik: Protokolle, Standards und Softwarearchitektur, 5., aktual. und erw. aufl. ed.; ATZ/MTZ-Fachbuch; Springer Vieweg: Wiesbaden, Germany, 2014. [Google Scholar] [CrossRef]
- Supke, J.; Zimmermann, W. Diagnosesysteme im Automobil: Transport- & Diagnoseprotokolle. Available online: http://www.emotive.de/documents/WebcastsProtected/Transport-Diagnoseprotokolle.pdf (accessed on 5 December 2020).
- Kunze, S. On-Board Fahrzeugdiagnose. Available online: https://tu-dresden.de/ing/informatik/ti/vlsi/ressourcen/dateien/dateien_studium/dateien_lehstuhlseminar/vortraege_lehrstuhlseminar/hs_ss05_pdf/steffen_kunze.pdf?lang=de (accessed on 5 December 2020).
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication This Paper Introduces the Concept of a A Whitepaper by Dr. Michael Grieves. White Paper. 2014. Available online: https://www.researchgate.net/publication/275211047_Digital_Twin_Manufacturing_Excellence_through_Virtual_Factory_Replication (accessed on 5 December 2020).
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020. [Google Scholar] [CrossRef]
- Baumann, M.; Rohr, S.; Lienkamp, M. Cloud-connected battery management for decision making on second-life of electric vehicle batteries. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 10–12 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Self-Study Programme 530: The e-Golf. Available online: https://vwgpaintandbody.co.uk/wp-content/uploads/Volkswagen-e-golf.pdf (accessed on 5 December 2020).
- Rahimzei, E.; Sann, K.; Vogel, M. Kompendium: Li-Ionen-Batterien: Grundlagen, Bewertungskriterien, Gesetze und Normen. 2015. Available online: https://www.dke.de/resource/blob/933404/3d80f2d93602ef58c6e28ade9be093cf/kompendium-li-ionen-batterien-data.pdf (accessed on 5 December 2020).
- Idaho National Laboratory. 2015 Volkswagen e-Golf Advanced Vehicle Testing—Baseline Vehicle Testing Results. 2016; pp. 1–5. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/fact2140egolf2015.pdf (accessed on 5 December 2020).
- Hochvoltbatteriesystem im e-Golf. 2014. Available online: https://www.volkswagen-newsroom.com/de/batterie-3634 (accessed on 25 April 2020).
- Karger, A.; Wildfeuer, L.; Maheshwari, A.; Wassiliadis, N.; Lienkamp, M. Novel method for the on-line estimation of low-frequency impedance of lithium-ion batteries. J. Energy Storag. 2020, 32, 101818. [Google Scholar] [CrossRef]
- Auto-Intern GmbH. Was Ist VCDS? Available online: https://www.vcds.de/ueber-vcds/ueber-vcds (accessed on 4 February 2020).
- Shen, P.; Ouyang, M.; Lu, L.; Li, J. State of Charge, State of Health and State of Funktion Co-estimation of Lithium-ion Batteries for Electric Vehicles. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016. [Google Scholar] [CrossRef]
- Volkswagen E-Golf—VIN 2012. 2017. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryEGolf2012.pdf (accessed on 26 November 2020).
- Brand, M.J.; Berg, P.; Kolp, E.I.; Bach, T.; Schmidt, P.; Jossen, A. Detachable electrical connection of battery cells by press contacts. J. Energy Storage 2016, 8, 69–77. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Adermann, J.; Kreibich, J.; Lienkamp, M. Experimental Study of Energy Consumption Variation in Recurring Driving Trips. J. Electr. Eng. 2017, 5. [Google Scholar] [CrossRef]
- Park, S.; Savvides, A.; Srivastava, M. Battery capacity measurement and analysis using lithium coin cell battery. In Proceedings of the 2001 International Symposium on Low Power Electronics and Design—ISLPED ’01, Huntington Beach, CA, USA, 6–7 August 2001; ACM Press: New York, NY, USA, 2001; pp. 382–387. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, H.; Ning, Z.; Mu, Z.; Sun, C. Comparative research on RC equivalent circuit models for lithium-ion batteries of electric vehicles. Appl. Sci. 2017, 7, 2. [Google Scholar] [CrossRef]
- Zenati, A.; Desprez, P.; Razik, H.; Rael, S. A methodology to assess the state of health of lithium-ion batteries based on the battery’s parameters and a fuzzy logic system. In Proceedings of the 2012 IEEE International Electric Vehicle Conference—IEVC, Greenville, SC, USA, 4–8 March 2012. [Google Scholar] [CrossRef]
- Volkswagen E-Golf—VIN 6525. 2017. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryEGolf6525.pdf (accessed on 26 November 2020).
- Volkswagen E-Golf—VIN 5818. 2017. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryEGolf5818.pdf (accessed on 26 November 2020).
- Volkswagen E-Golf—VIN 2140. 2017. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryEGolf2140.pdf (accessed on 26 November 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Used | Comment |
|---|---|---|
| State of charge | ||
| Circuit principle methods | Yes | Using OCV in reverse discharge test |
| Filter methods | Yes | No parametrized model. Fit-model-corrected OCV-method used |
| Data-driven methods | No | Not enough data for learning |
| State of health | ||
| Discharge test | Yes | Ampere counting used for capacity estimation |
| Measurement of quiescent voltage characteristic | No | No measurement of quiescent charac. possible |
| Internal resistance method | Yes | Estimate using ECM fit |
| Impedance spectroscopy | No | No online suitability |
| Chemical analysis | No | Can’t destroy cells |
| Model-based methods | No | Neither model of stress factors nor data available |
| Measurement of intracellular pressure | No | No online suitability |
| Signal | UDS ID | Calculation | Description |
|---|---|---|---|
| HV current | 0x1E3D | value | Current through the battery pack |
| HV voltage | 0x1E3B | value | Voltage of the battery pack |
| HV temperature | 0x2A0B | value | Temperature of the battery pack |
| SOC | 0x028C | value | SOC of the battery pack |
| Voltage cell 1 | 0x1E40 | value | This is the base address for the cell voltages. Increment for following cells. |
| Any tuple can be recorded at an approx. 5 Hz to 9 Hz rate. | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merkle, L.; Pöthig, M.; Schmid, F. Estimate e-Golf Battery State Using Diagnostic Data and a Digital Twin. Batteries 2021, 7, 15. https://doi.org/10.3390/batteries7010015
Merkle L, Pöthig M, Schmid F. Estimate e-Golf Battery State Using Diagnostic Data and a Digital Twin. Batteries. 2021; 7(1):15. https://doi.org/10.3390/batteries7010015
Chicago/Turabian StyleMerkle, Lukas, Michael Pöthig, and Florian Schmid. 2021. "Estimate e-Golf Battery State Using Diagnostic Data and a Digital Twin" Batteries 7, no. 1: 15. https://doi.org/10.3390/batteries7010015
APA StyleMerkle, L., Pöthig, M., & Schmid, F. (2021). Estimate e-Golf Battery State Using Diagnostic Data and a Digital Twin. Batteries, 7(1), 15. https://doi.org/10.3390/batteries7010015