1. Introduction
Currently, unsustainable urban development accounts for 70% of global Greenhouse Gas (GHG) emissions, with urbanized areas contributing 23% [
1]. The trend is that by 2030, it will increase by 20%, and by 2050, it will increase by 50% [
2]. According to the United Nations (UN), GHG emissions cause an increase of approximately 2 °C in global temperature [
3]. It also affects air quality in cities, where poor air quality poses a critical risk to the population’s health, leading to pathologies in the respiratory, cardiovascular, and central nervous systems [
2,
4,
5,
6]. For this reason, electromobility has been proposed as an early solution to the emissions caused by transport using internal combustion engines (ICEs) [
7].
One trend within electromobility that has led to an increase in the sales of Light Electric Vehicles (LEVs) is micromobility. This can be defined as the use of light vehicles powered by non-polluting energies for short trips in built-up areas [
8,
9]. Dependence on cars is one of the main problems in large cities worldwide, so micromobility offers a sustainable, viable, and flexible transportation alternative [
10,
11,
12], in addition to improving the psychological and physical well-being of users [
13]. As a result, multiple cities have promoted and implemented infrastructure for this type of transportation, leading to a significant shift in the way people get around [
10,
11]. Over the last 20 years, shared mobility systems have grown from fewer than 10 cities around the year 2000 to just over 2900 cities worldwide in 2021 [
14,
15]. Among the vehicles that can be considered within this category are powered and unpowered vehicles, such as bicycles, skateboards, and tricycles. However, there is no standard classification in micromobility vehicles; the International Transport Forum (IFT) proposes four categories to classify micromobility from a safety perspective [
8]:
Type A: Powered or unpowered vehicles weighing less than 35 kg and with a maximum powered design speed of 25 km/h.
Type B: Powered or unpowered vehicles weighing between 35 kg and 350 kg and with a maximum powered design speed of 25 km/h.
Type C: Powered vehicles weighing less than 35 kg and with a design speed between 25 km/h and 45 km/h.
Type D: Powered vehicles weighing between 35 kg and 350 kg and with a design speed between 25 km/h and 45 km/h.
Likewise, in LEV classification, the European Union offers a categorization within its L-category vehicle classification system. The L1e-L3e classes cover two-wheeled vehicles, which include e-scooters, e-bikes, and e-motorcycles [
9]. Since 2017, through direct sales or shared mobility platforms, LEVs have been introduced into road traffic of more than 100 cities [
16]. In the United States (US), shared micromobility systems have recorded over 133 million trips in 2023, a tenfold increase in just a decade. To achieve a substantial impact on sustainability, micromobility has the following fundamental objectives: reducing GHG emissions by reducing the use of polluting vehicles, reducing costs to bridge the social gap through sustainable business models, and improving safety and infrastructure to enhance the travel experience [
17]. However, this trend has brought serious security problems to the population. Quick adoption has outpaced the necessary evolution of infrastructure, traffic regulations, and public awareness, creating a new and often poorly understood safety paradigm [
9]. In China, between 2013 and 2017, there were 10,000 incidents related to fires in LEV batteries, resulting in more than 200 deaths. In England, 70 fires related to this problem were reported in London in 2021, with no fatalities. In the US, between 2021 and 2022 there were 19 deaths from incidents of this type, with New York City having the most such incidents, registering 104 fires in 2021, reaching almost double the number of incidents for the following year with 6 deaths, and 13 deceases had been reported by mid-2023, with almost the same number of fires as at the end of 2022, so an upward trend is set for the following years [
18]. Spielbauer et al. [
19] predict that battery fire incidents and their severity will increase in the future due to two factors: the increasing energy density of new cells being developed and the growing demand for batteries to meet the EV market. Gehandler et al. [
20] report that, on average, one Battery Electric Vehicle (BEV) fire occurs per year during battery charging in multi-story car parks or large garages. Meigs [
18] investigates multiple fires caused by LEV batteries, from storage warehouses to apartment buildings, which have raised concerns among both the population and government authorities.
Pan et al. [
21] recommend avoiding discharging the battery altogether and avoiding leaving it unused for extended periods, as this can cause premature aging and increase the risk of fatal failure.
The energy storage system of electric vehicles is responsible for supplying the stored electrical energy to the vehicle’s propulsion system and secondary systems [
22]. Lithium-ion batteries (LIBs) are widely used in the electromobility sector as energy storage due to their high energy density, which is significantly better than that of other types of batteries, such as lead–acid, nickel–cadmium, and nickel–metal, which were once used but have been displaced by LIBs. The energy storage system in electric vehicles can be divided into three categories: (1) The cell—the name given to an individual battery. Internally, it is composed of positive and negative electrodes, separators, and an electrolyte, embedded in a metal housing (typically steel or aluminum), with positive and negative terminals on the exterior. (2) The module—the connection of multiple cells in series or parallel, placed on polymer bases and connected with nickel-plated steel sheets welded to the cell terminals. Additionally, a battery management system (BMS) is connected and embedded in a heat-shrinkable plastic and a general housing (aluminum, ABS, or fiberglass), as required by the application. (3) The package—at this level, this is formed by combining modules, which are connected in series or parallel, depending on the application. Like the module, a battery management system is required. However, this system incorporates sensors and microcontrollers, as well as support systems (such as cooling and/or heating) to ensure its correct operation. Likewise, the package is protected by a structure with protection plates to maintain the battery’s integrity in the event of mechanical impact [
23,
24]. According to Wang et al. and Goodman et al. [
25,
26], BEVs that suffer a traffic accident, can deform and/or fracture main elements of their energy storage system, which would cause failures such as disconnection between key elements, and external or internal short circuit in the cells, which could result in battery fire. The correct positioning of the energy storage system, together with an appropriate structural design, is a key parameter for electric vehicle safety [
27].
In safety micromobility, the literature focuses on the injuries caused by collisions or road traffic accidents. The authors report on the severity and the body region affected by driver-users, where the upper and lower extremities are the most affected, mostly in LEVs like e-scooters, e-bikes, and conventional bikes [
8]. Data from the US Consumer Product Safety Commission (CPSC) paints a stark picture, with Emergency Department (ED) visits related to e-scooters showing consistent year-over-year growth, nearly doubling in 2019 compared to the previous year. Additionally, overall micromobility injuries have increased by an estimated average of 23% annually since 2017. This trend has continued, with injuries soaring by nearly 21% in 2022 alone, accompanied by a rising number of fatalities [
28,
29]. In terms of collision type, there are collisions involved that occur due to loss of vehicle control or collisions with stationary objects, as well as crashes with objects in motion, such as motor vehicles, which can result in rear-end crashes or hit-and-run incidents. Another crash type involves pedestrians tripping over e-scooters or fallen bicycles [
9]. However, the literature does not mention how road traffic accidents occur and what happened with the LEVs.
The safety of the energy storage systems of electric vehicles is critical for their safe use on the streets, as even the highest level of protection is insufficient to prevent fires at high speeds. Zhu et al. [
30] noted that battery packs are susceptible to penetration due to sideswipe collisions and road debris impacts. In mechanical abuse, LIBs could have malfunctions, such as the breakage of the module’s external and internal support elements. This can lead to the disconnection between main elements, such as the BMS with the cells, as well as the rupture of the connector plates between the internal cells, which would cause a reduction in the voltage and energy capacity of the module. In more serious failures, an external or internal short circuit may occur in the cells due to the intrusion of conductive materials into the module. In this condition, LIBs exhibit a voltage drop and an increase in temperature, which varies depending on the type of short circuit. In external short circuits, the increase in temperature and voltage drop is progressive, which causes electrolyte leakage due to the increase in internal pressure in the cell. However, if it were to occur between the longitudinal faces of the cells, the steel would melt due to the extreme increase in temperature, which would cause a fracture in the casing, allowing the electrolyte to leak.
On the other hand, in internal short circuits, the thermal reaction is extremely violent; when an external conductive element penetrates the cell, or the internal roll is billed by the formation of dendrites due to aging, this causes conjunction between the anode and the cathode, quickly causing a voltage drop, and an increase in internal temperature and pressure, which leads to thermal runaway from the cell. At the module level, this can lead to a domino effect in the surrounding cells, as the external increase in temperature in a cell also leads to different levels of failures due to the evaporation of the internal electrolyte, from the decrease in energy capacity, to an internal short circuit due to the total evaporation of the electrolyte and the melting of the separator, resulting in thermal runaway from multiple cells. Even if the pressure inside the module or package is very high, deflagration can occur [
27,
28,
29,
30,
31,
32]. Zhao et al. and Larsson [
33,
34] found that an internal short circuit can occur for multiple reasons, such as mechanical deformations or manufacturing failures. They also observed that another reason may be the formation of dendrites within the cells that fracture the internal materials of the roll due to aging.
In fire propagation, full-scale experiments conducted in residential structures show that an e-scooter fire can cause a room to reach flashover, a state where all combustible surfaces ignite simultaneously within 30 s of the first visible smoke being emitted from the battery. The time from that first puff of smoke to a violent gas explosion can be as little as 10–20 s, making the room of origin immediately fatal and rendering escape nearly impossible [
35]. For suppression fires, Torelli et al. [
36] quantify the consequences of a single-cell thermal runaway failure within an e-mobility battery pack and determine the effectiveness of various suppression strategies that could be employed by a user in a home environment. Direct water cooling only partially mitigated the event by lowering the temperature and slowing the propagation, but it could not extinguish it. Fire blankets were counterproductive, failing to contain hazards while increasing pack temperature by insulating the event. The study concludes that incorporating design features, such as thermal insulation between cells, is a more robust solution for preventing thermal propagation and minimizing the severity of battery failure.
Aging in LIBs has been rigorously studied, as it undergoes a series of gradual and irreversible degradation processes. Aging leads to a reduction in nominal capacity and an increase in internal resistance (IR), which is the opposition to current flow inside the LIB. The elevated internal resistance in an aged cell is a critical factor that fundamentally alters its response to abuse. The state of health (SOH) of the battery is a quantitative parameter that measures the current state of a cell with respect to its original state. At the micro level, the presence of microcracks in the anode and cathode material, due to the formation of dendrites, can lead to serious failures such as an internal short circuit. In a 1000-cycle aging study, Goodman et al. [
26] found that small-format pouch cells damaged by three-point bending often remained electrically functional despite the formation of internal short circuits (ISCs), but exhibited accelerated degradation, as confirmed by electrical characterization, Computed Tomography (CT), and post-mortem analysis. According to Santhanagopalan et al. [
37], this type of failure can be presented by cells that comply with the safety regulations implemented in industry, due to imperceptible failures in manufacturing, so it should be of special attention in future research.
A significant gap exists in the scientific literature regarding the long-term impact of mechanical stress on the safety and aging of lithium-ion batteries, a topic that has received far less attention than aging under standard operating conditions. To understand the influence of cycling on mechanical damage, Fuchs et al. [
38] characterized and compared two pouch cells, one cycled and one not, after inducing deformation with a 4 mm diameter steel ball, employing post-mortem and SEM analysis for the investigation. Significantly accelerated aging was observed by Li et al. [
39] in 21,700 cylindrical cells subjected to radial compressions of 3 mm and 6 mm, followed by 100 cycles. Through characterization using Incremental Capacity Analysis (ICA), Electrochemical Impedance Spectroscopy (EIS), and CT, this degradation was attributed to potential micro-leakage at the positive terminal gasket. In an experiment by Sahraei et al. [
40], cylindrical 18650 LFP cells underwent rod indentation with a 6 mm diameter and 4.6 mm depth, followed by subsequent cycling for up to 89 times. After this, their performance showed no significant degradation relative to control cells.
Given the operation of Light Electric Vehicles (LEVs) in urban areas, these vehicles are not exempt from traffic accidents. Therefore, with the growing demand for this type of electric vehicle in recent years, the number of accidents due to falls and collisions with mobile or stationary objects is also expected to increase. In the context of electric micromobility, such situations are typically addressed from the perspective of injuries to the user and/or other affected individuals. However, energy storage systems based on electrochemical lithium-ion cells, such as those found in bicycles, scooters, and tricycles, can malfunction under conditions of mechanical abuse, as might occur in a traffic collision. The UL 2271:2018 standard categorizes the outcomes of such abuse into several levels of severity [
41]:
Consequently, the quantification of abuse during such an event is of significant interest, as it can trigger a battery malfunction that may lead to catastrophic failure and a hazardous situation for users and third parties.
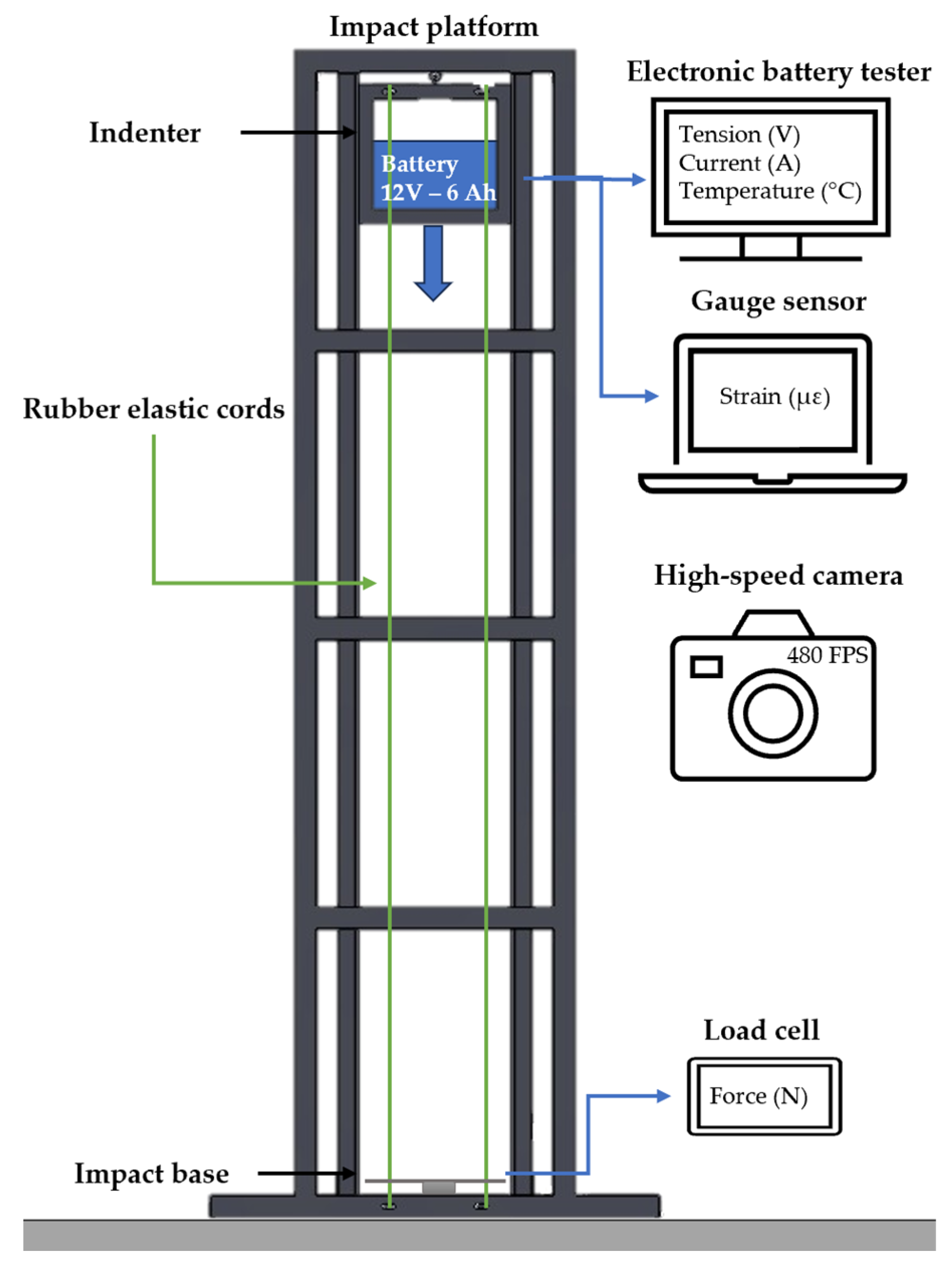
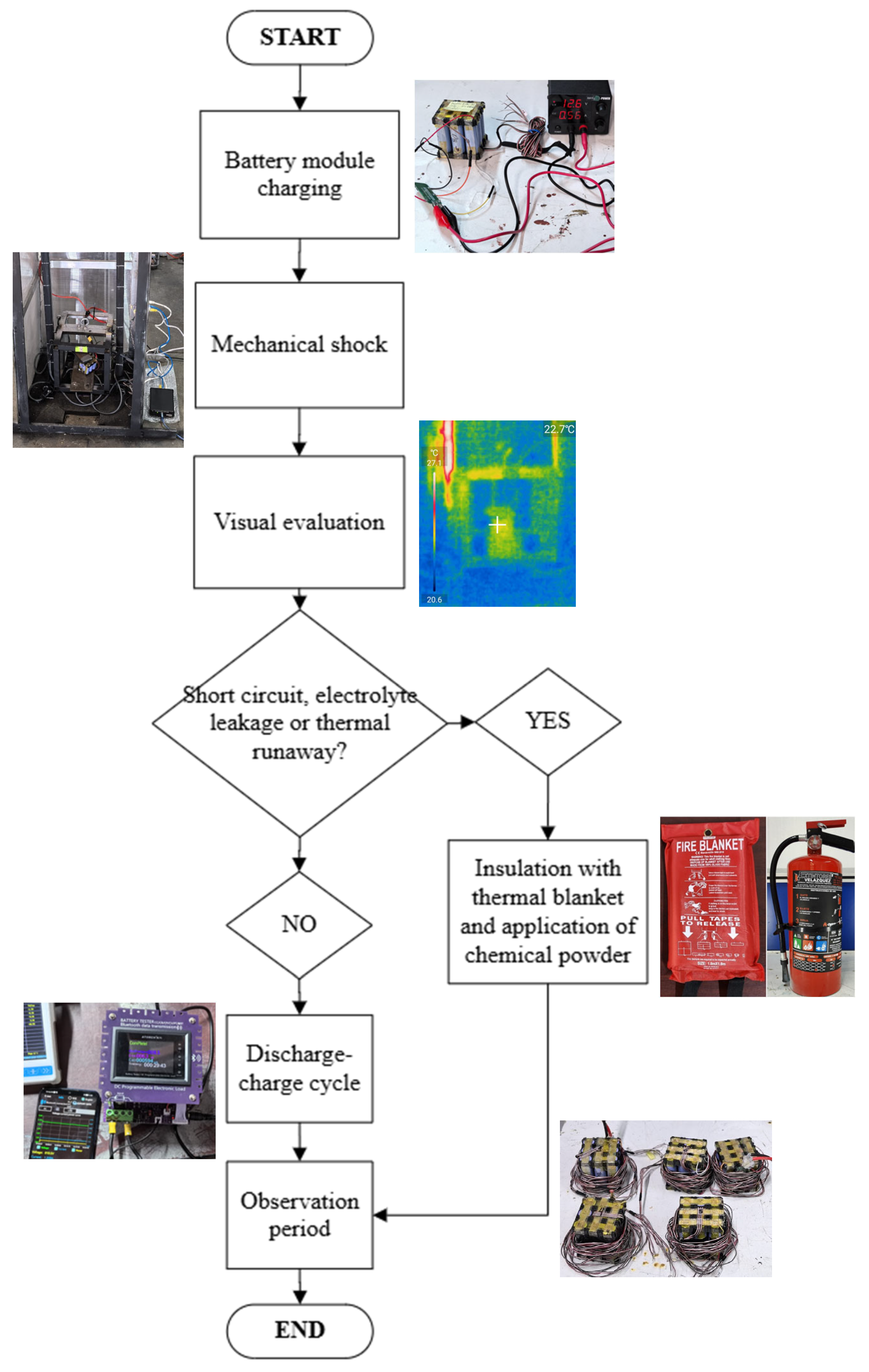
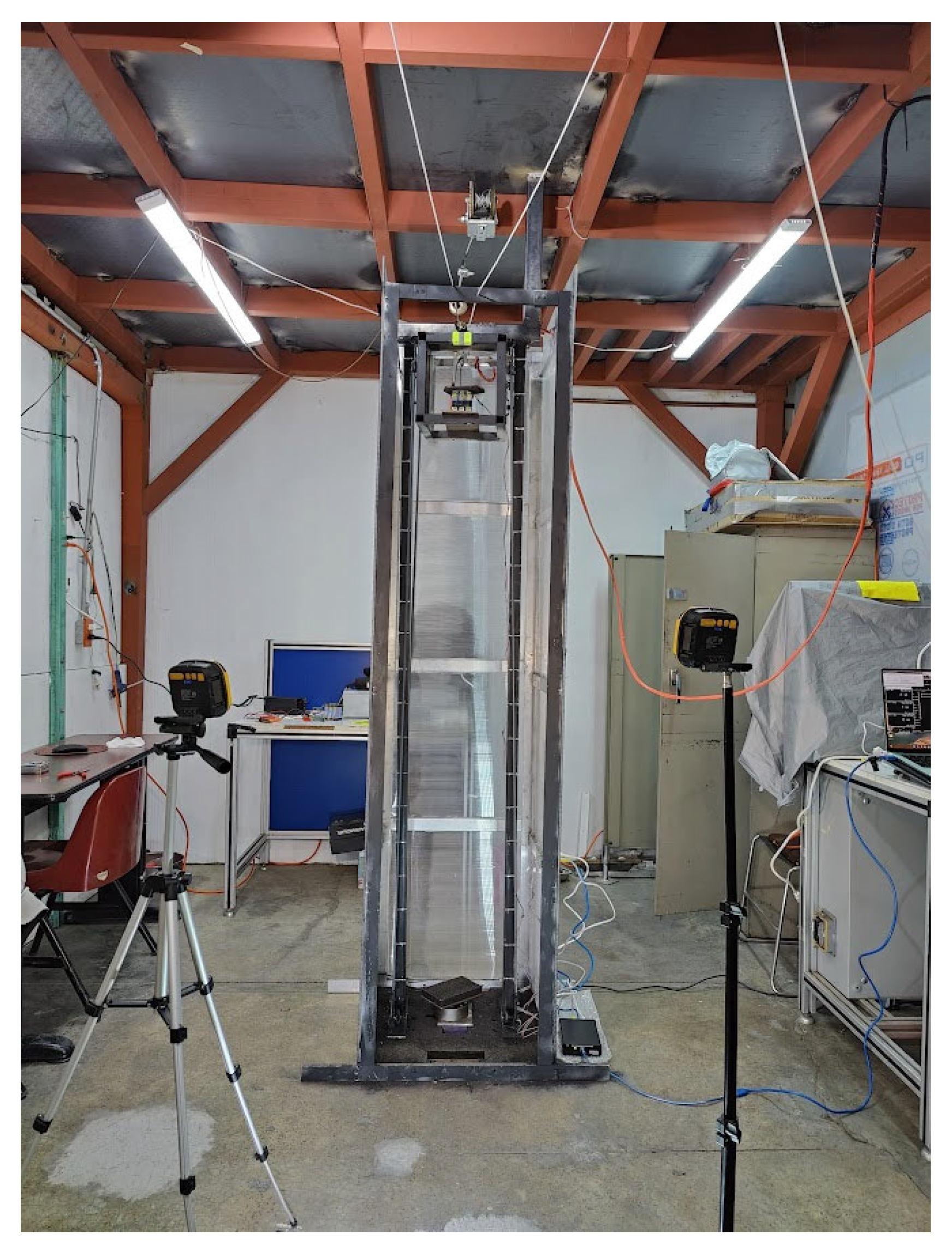
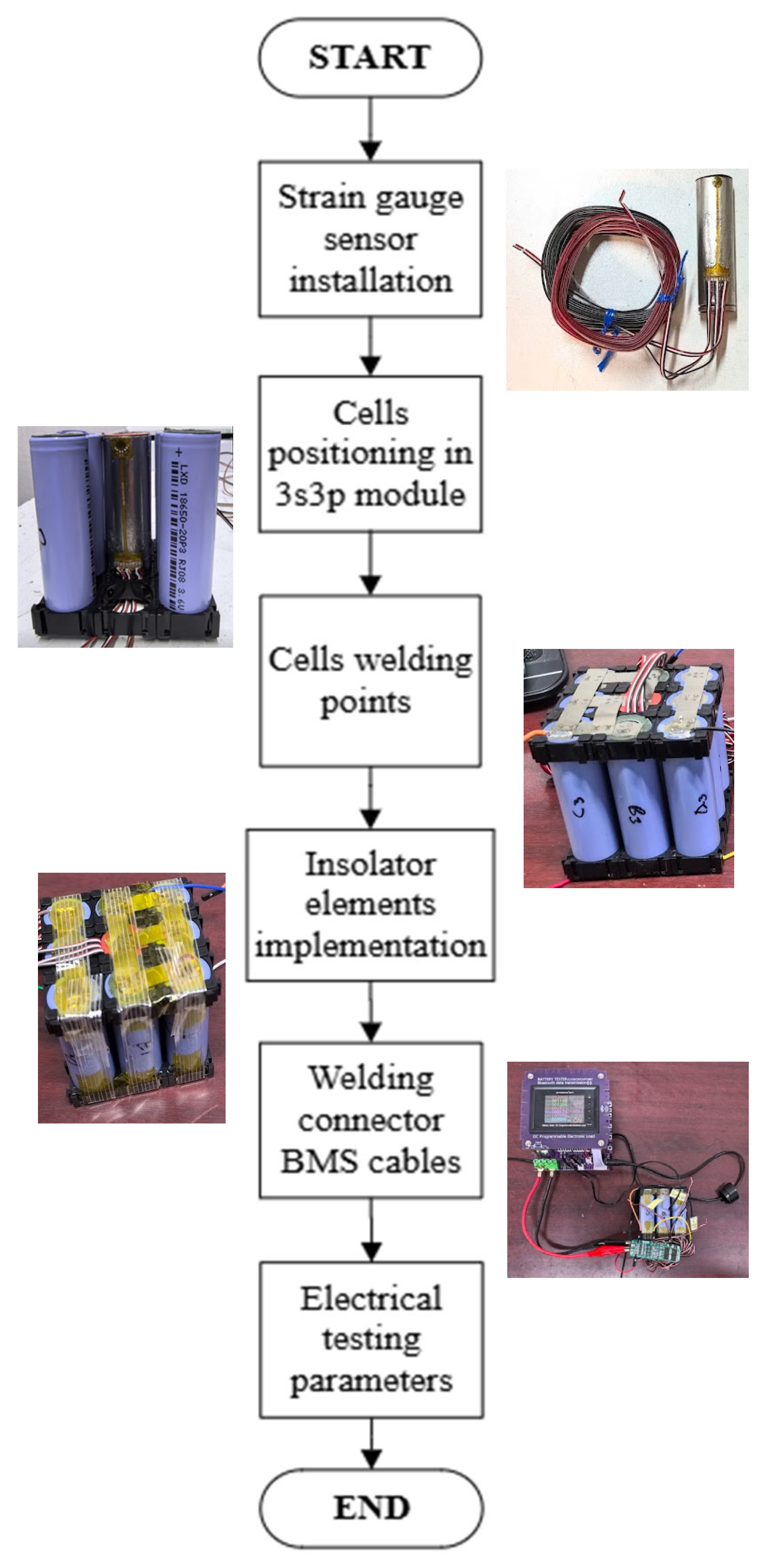
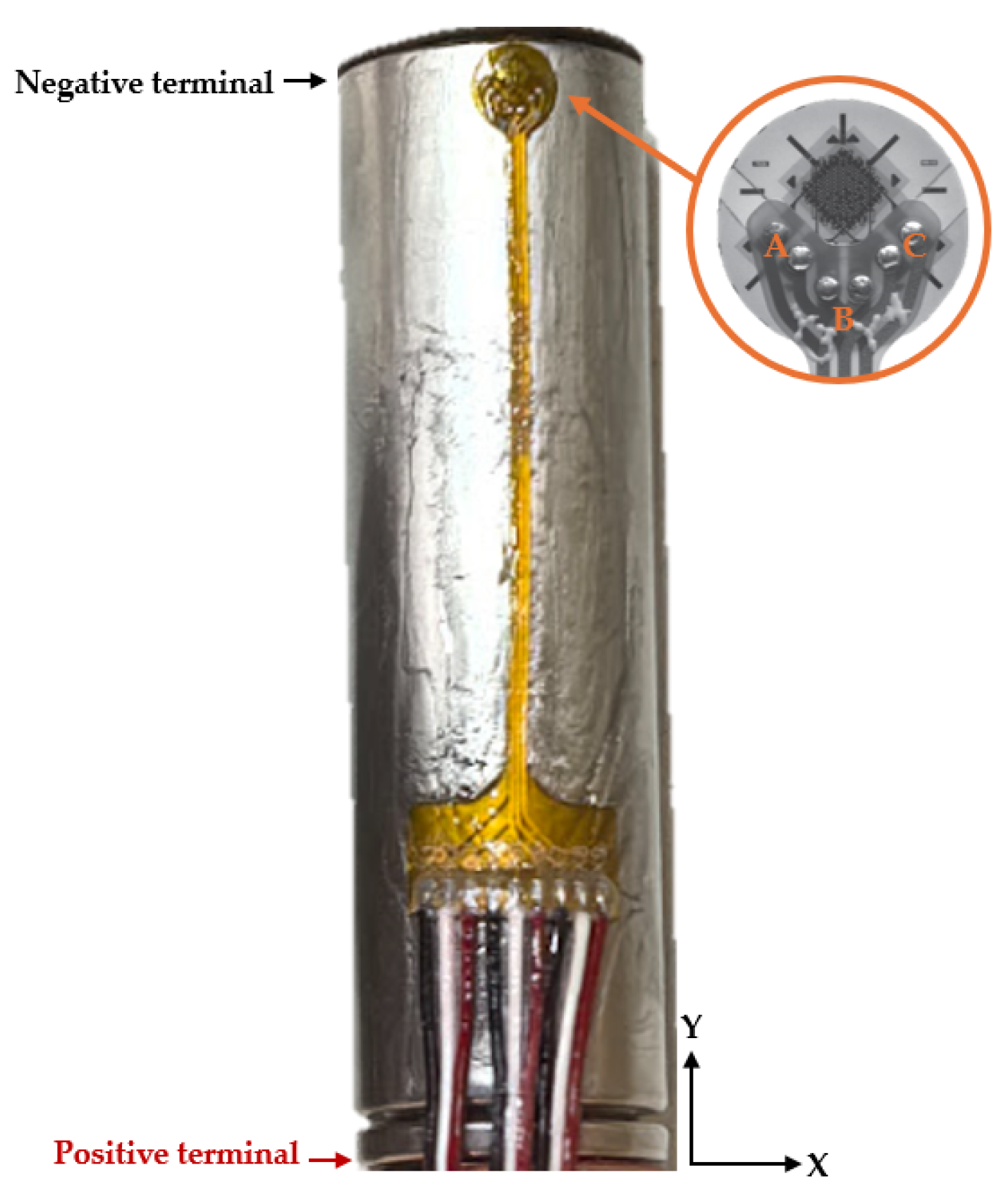
This research aims to evaluate the electrical and mechanical parameters of 18650 lithium-ion cells within aged battery modules sourced from electric micromobility Light Electric Vehicles (LEVs). Through charge–discharge cycling tests, the SOH and IR of the cells under evaluation are determined. Subsequently, using an impact platform, a mechanical shock scenario is recreated in accordance with the UL2271:2018 standard [
41] to simulate impacts the vehicle may receive, which could affect battery performance. To quantify the mechanical damage resulting from this phenomenon, the use of strain gauges affixed to the housing of the module’s internal cells is proposed. Concurrently, the module’s electrical parameters are monitored with a lithium-ion battery testing system to detect transient spikes. Such events could precipitate an internal short circuit and/or a rise in cell temperature, potentially triggering a cascading failure in adjacent cells that could lead to a fire or an explosion in the electric vehicle’s battery module.
The article is organized as follows:
Section 2 describes the experiment’s design, materials, instrumentation used in the tests, and the methodology for the mechanical shock test steps. Also, the selected LEV and its battery module are presented as objects of study. Likewise, the description of the steps for manufacturing the test modules and the impact platform contemplated for the mechanical shock tests is provided.
Section 3 presents the results obtained from the performance tests conducted in the cells, as well as the stresses and deformations induced by mechanical shock in the central cells of the battery modules. Additionally, the impact velocity and total acceleration received by the battery modules are presented through videogrammetric analysis.
Section 4 discusses the results shown in
Section 3.
Section 5 presents the conclusions of the research.
4. Discussion
Regarding the study object, as has been mentioned, the e-scooter is pre-owned, so the conditions of use of the battery module prior to purchase are unknown. Factors such as the drop, prolonged charging, or discharging of the battery module affect its lifetime.
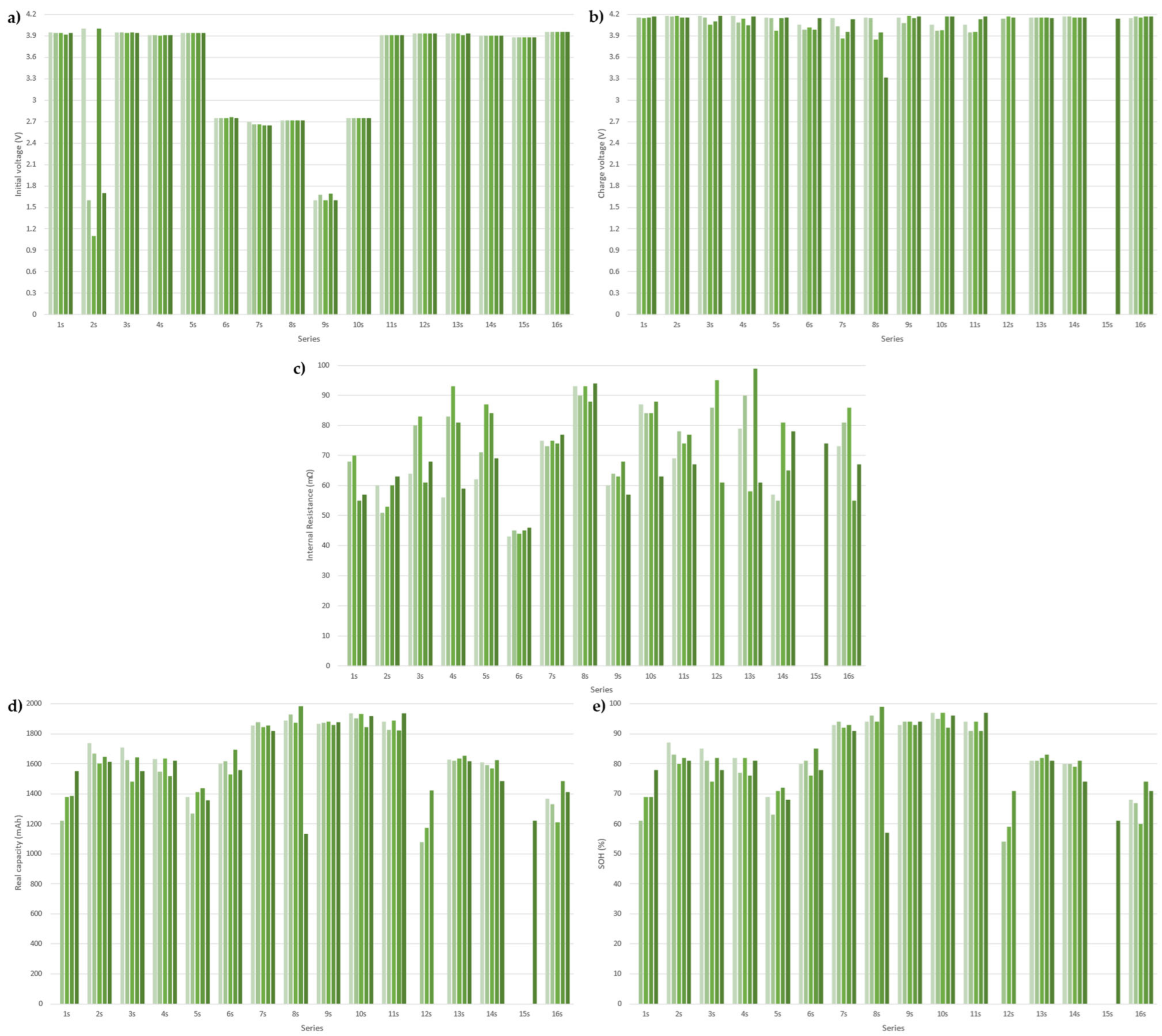
The battery module consists of 80 cells, each with a capacity of 2 Ah, arranged in 16 cells per string and 5 strings per cell bank. With five cells in parallel, a coulomb capacity of 10 Ah is obtained, and the manufacturer reports a coulomb capacity of 12 Ah. So, the actual Coulomb capacity is 2 Ah lower than what the manufacturer reports on its datasheet.
The aging of the battery module was notorious. It was not possible to make a capacity test to verify its real capacity and SOH because it does not have a measurement instrument; its charge voltage measured was 64.1 V, which is lower than the charge voltage of a brand-new battery module according to the manufacturer’s parameters (67.2 V). Although, in the voltage series, it was noted that in serial 2, in three cells, and in serials 6 to 10, all cells were below their discharge voltage. When analyzing the internal cells, it was found that 18 cells (22%) were below the discharge voltage reported by the manufacturer (2.75 V); the rest of the cells were within normal voltage values. This could occur due to a BMS malfunction, resulting in a balance issue in the cell’s series, or if the battery charger used was not manufactured according to the manufacturer’s specifications, which would affect the BMS functions. A future investigation testing the control and electronic systems in aged LEVs could help to understand how they contribute to the premature aging of internal cells.
In the cycling test, the 80 cells that made up the battery module were tested to measure their SOH. In this study, it was found that 46 cells (57%) had a SOH ≥ 80%, and 24 cells (30%) maintained a SOH ≥ 90%. On the other hand, seven cells (9%) stopped working within the first cycle. It should be noted that these cells were within the nominal voltage, in contrast to those with low voltage, which returned to the nominal voltage after a charging cycle. Regarding the remaining 27 cells (34%), their SOH was greater than 50%, so their useful life had ended, according to the datasheet. It should be noted that in the IR measurement, the cells presented an increase in resistance between 100 and 200% with respect to the original IR reported by the manufacturer (≤30 mΩ); however, this was obtained with a smart charger that has a two-wire method of measurement, so the values could have a high degree of uncertainty.
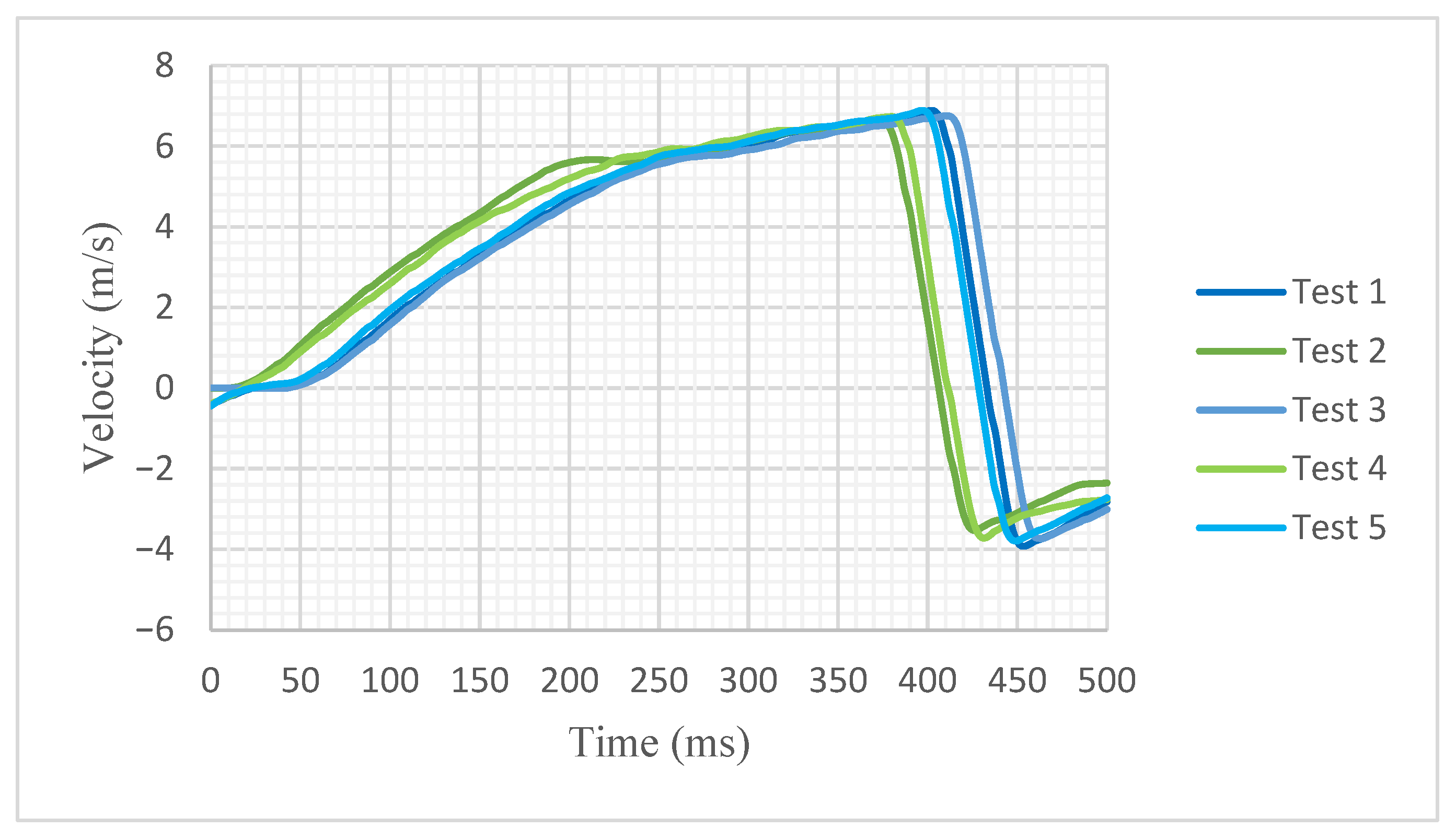
Regarding lineal kinematics,
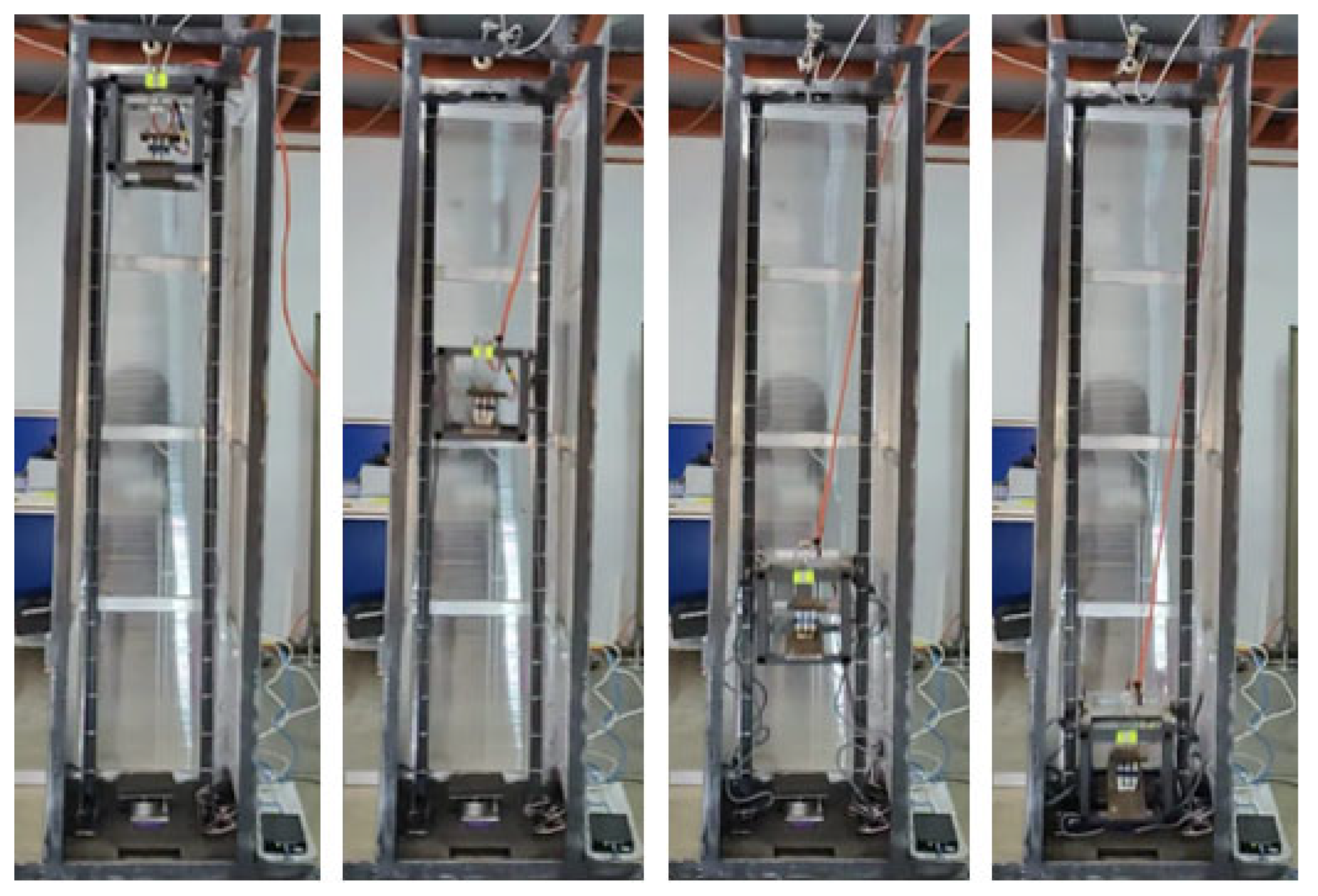
Figure 13 shows the comparison of speed against time in the five tests carried out. At this stage, the acceleration lasted between 0 and 250 milliseconds (ms), as the tension in the elastic cords had been released. Consequently, a 1 G acceleration stage was entered, and the speed increased continuously to between 250 and 420 ms. Subsequently, the impact occurred, wherein the indenter abruptly lost speed until it reached 0 m/s. However, due to inertia, a rebound stage occurred, which took place between 420 ms and 600 ms, wherein negative velocities resulted from the movement of the indenter in the opposite direction to the fall, ultimately stabilizing.
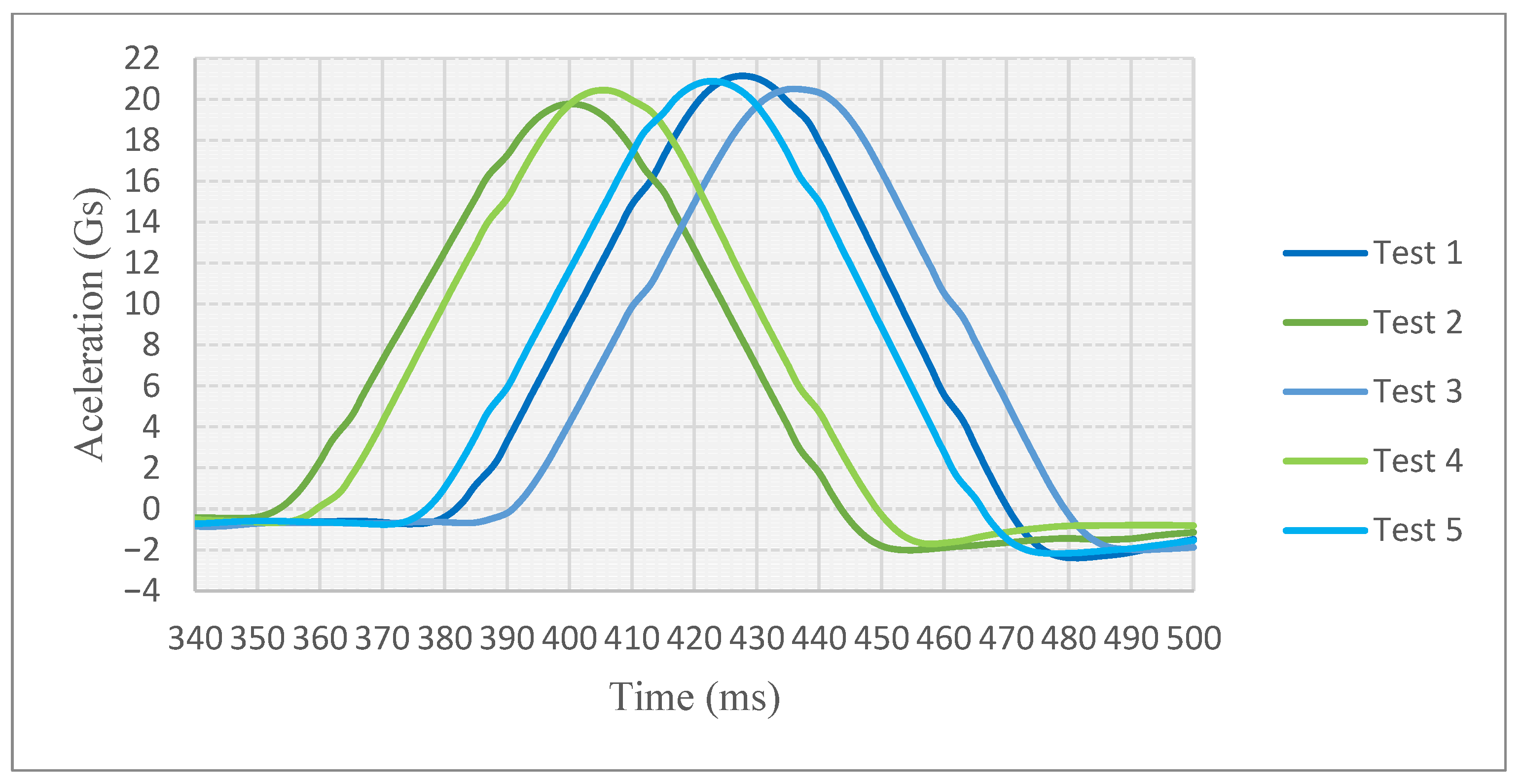
Figure 14 shows the comparison of acceleration against time in the five tests carried out. It should be noted that the semi-sinusoidal pulse part of the graph will be analyzed, as it is the primary focus of the study. This pulse occurred between 350 and 490 ms, where the start of each curve represents the acceleration before impact, and the peak corresponds to the maximum deceleration during impact. The average duration of these pulses is 53.6 ms. Maximum acceleration was measured by the change in direction, i.e., from maximum deceleration during impact to the maximum acceleration after impact. Additionally, the design data according to the regulations is a function of g-force, so the origin is positioned at the beginning of the curve, and the conversion from m/s
2 to g-force is carried out.
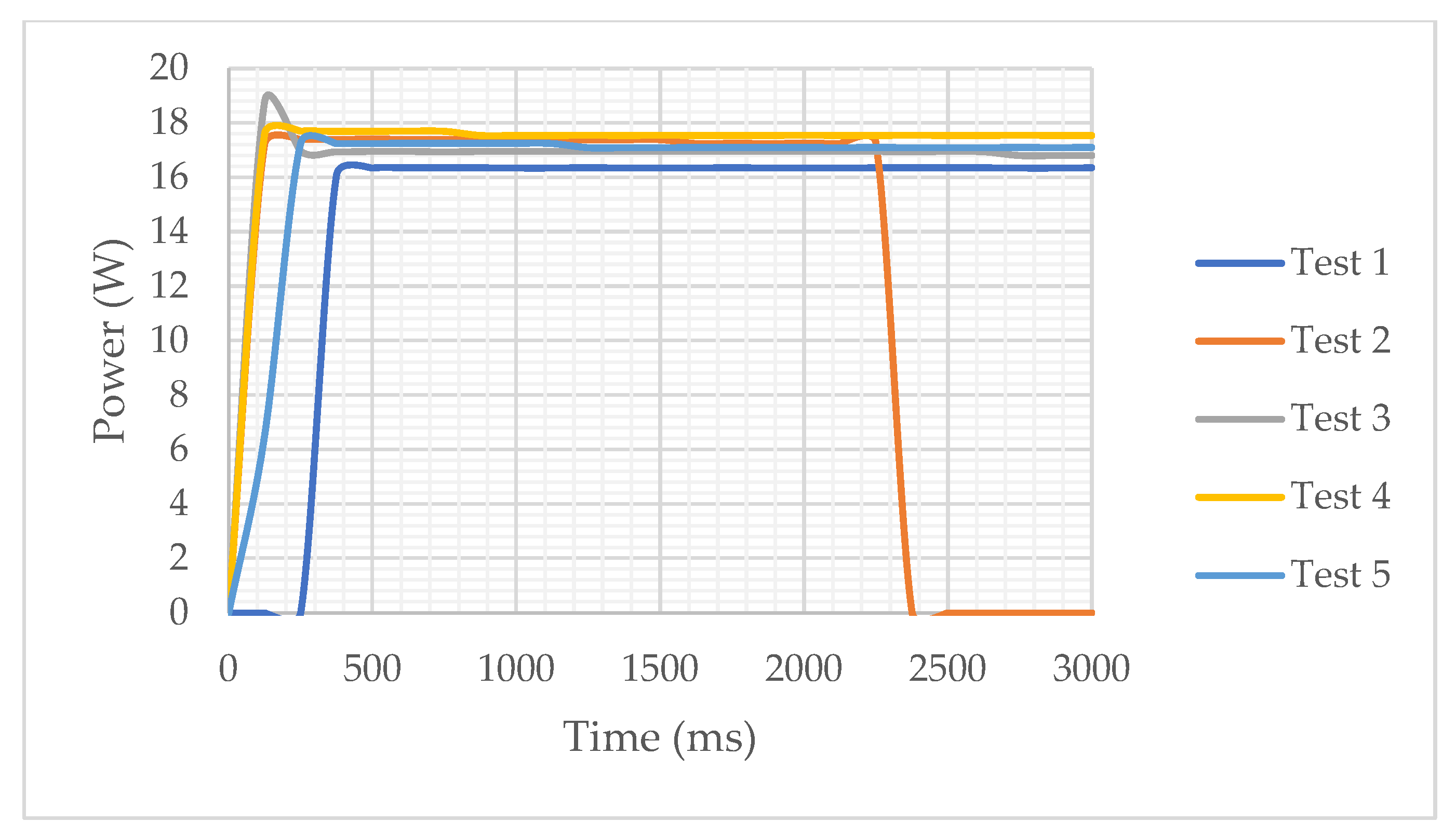
With respect to the electrical parameters, the DUTs were at 100% SOC. In
Figure 15, a voltage drop peak, and a current surge peak are observed; therefore, power is shown in
Figure 16 and
Figure 17, respectively. This is due to the power demand of 1.5 A DC during the tests. The moment of shock occurs between 2000 and 2500 ms, where test 2 presents a sudden drop in voltage, current, and power. This is due to the failure of the connection between the BMS and the XT-60 connector. With respect to the other modules, they did not present any change in their parameters at the time of the crash.
Regarding the thermal part, the internal and external temperatures of the modules were measured. The internal temperature was within a range of 25 ± 0.5 °C, whereas the external temperature record was in a range of 28 ± 0.5 °C. The temperature difference was due to the thermal camera recording the temperature of the BMS, which has a higher operating temperature than the cells.
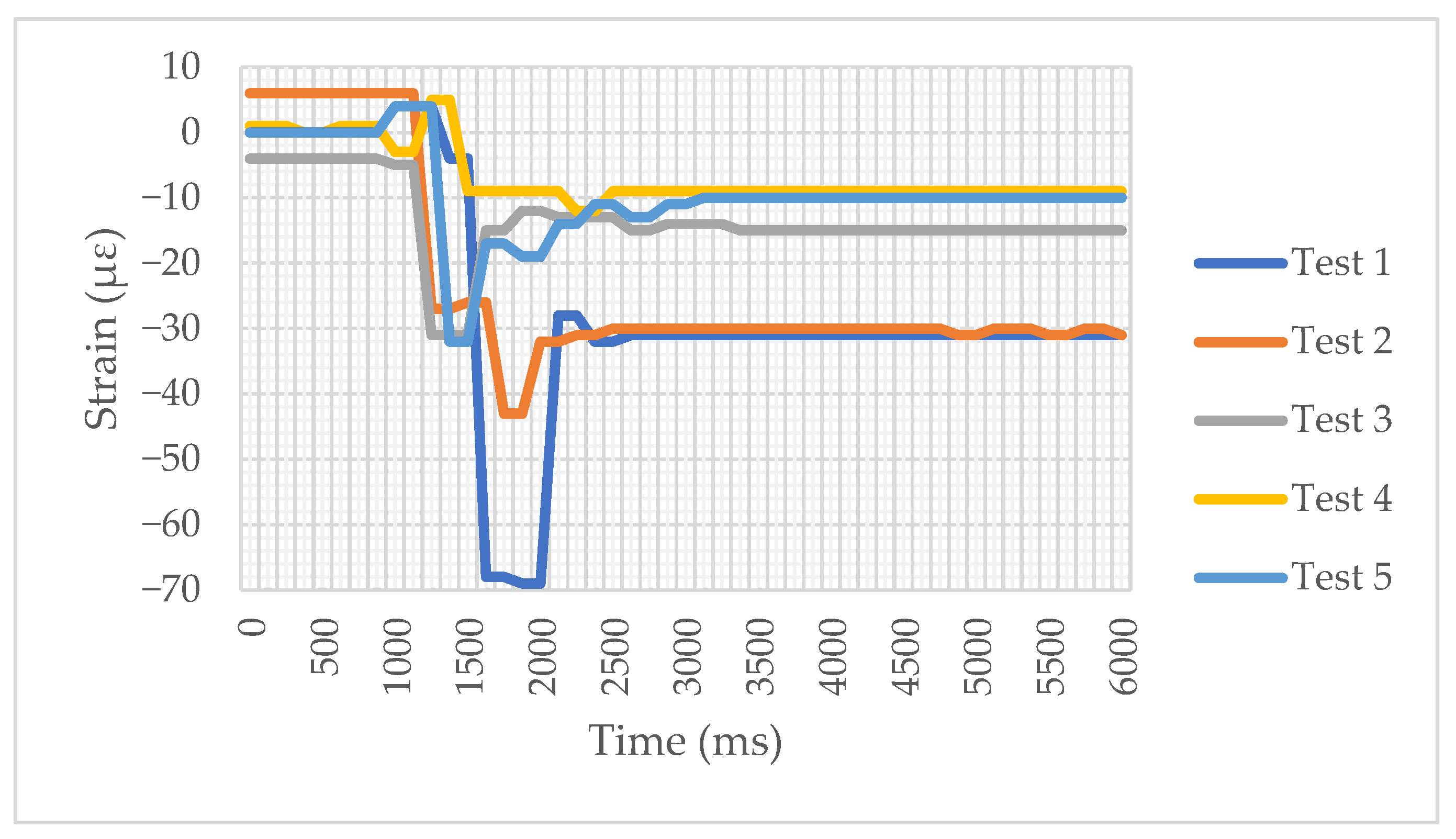
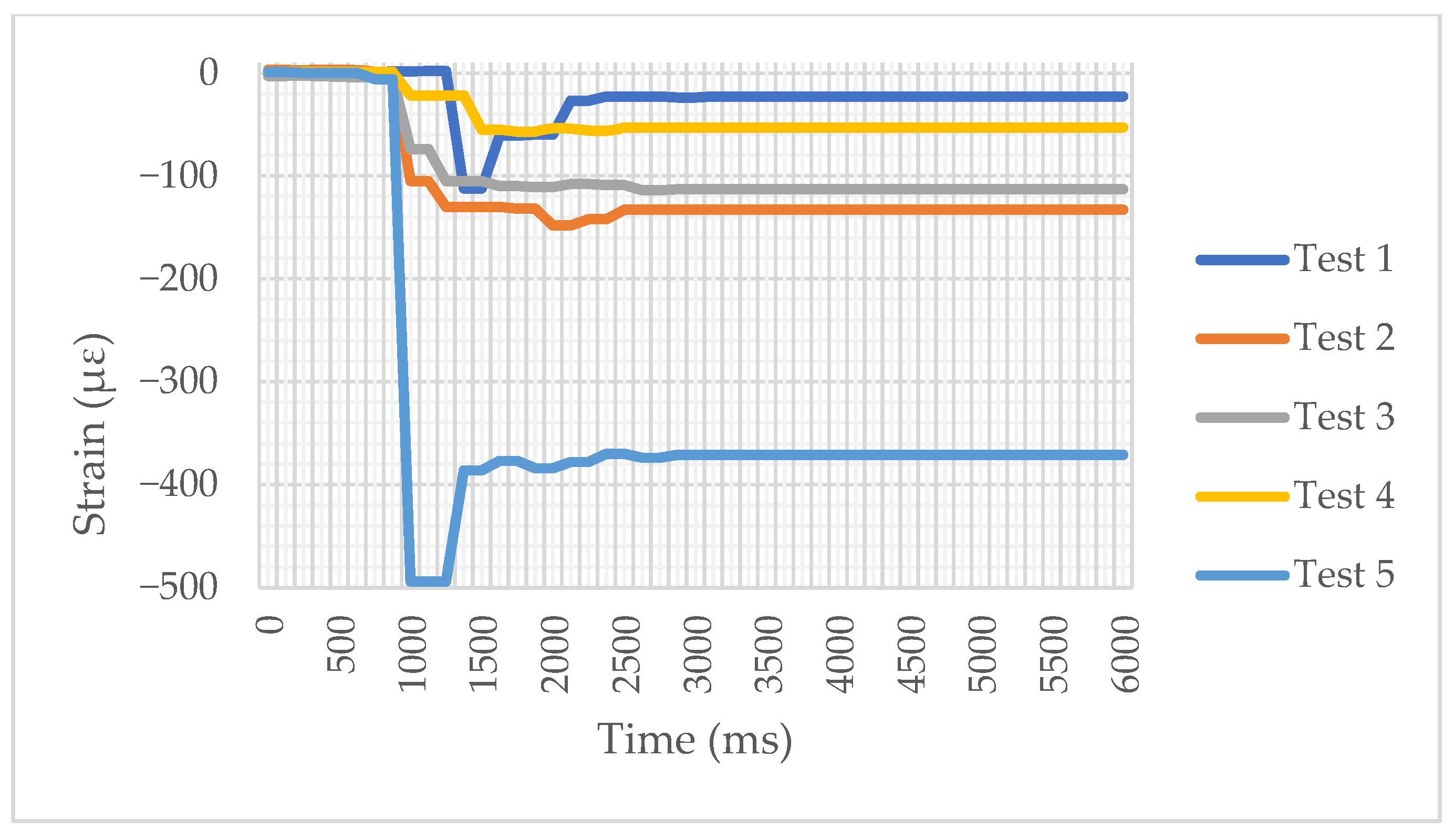
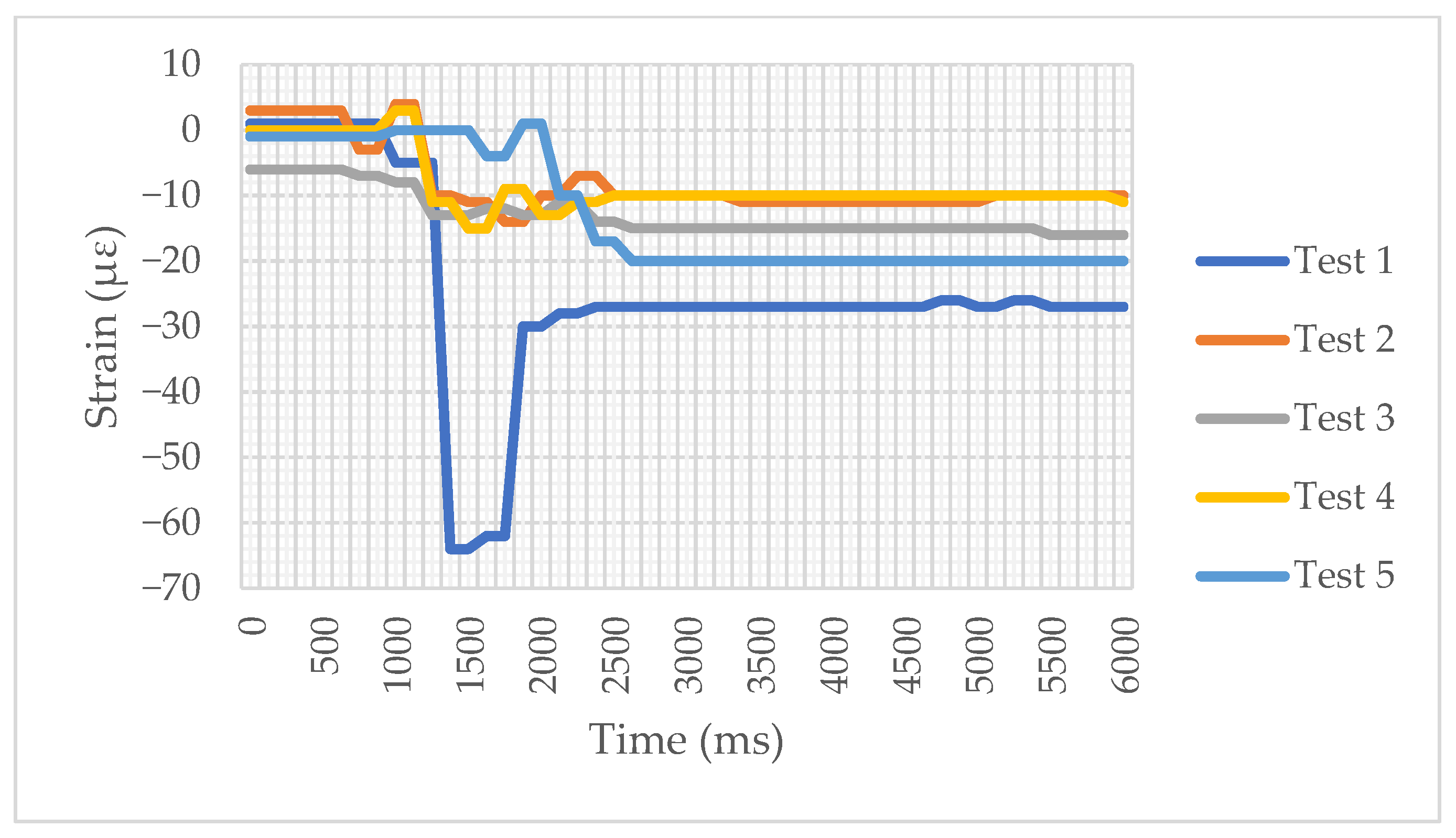
In the mechanical analysis,
Figure 18,
Figure 19 and
Figure 20 show the records of microdeformations in gauges A, B, and C, respectively. In these graphs, the peak of the microdeformations occurs between 1000 and 2000 ms. In
Table 18, the strain values are negative, which indicates the cells are being compressed during impact. The strain values varied across the tests, affecting the DUTs differently due to the impact force. Test 5 showed the highest compressive strain in the cell’s longitudinal face, this being −354 µε. Utilizing the Von Mises failure criterion, it was confirmed that the casings of the tested cells exhibit no cracks from the applied impact, as the elastic limit of the casing material (A3 steel) is 250 MPa. Test 5 recorded the highest result at 114.73 MPa. It is worth highlighting that the DUTs inside the platform were fixed only on its Y-axis. When reviewing the slow-motion recordings, it was noted that the DUTs moved randomly, which could have altered the measurements of the gauges during the impact, as observed in test 5.







 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}