
Review on Modeling and SOC/SOH Estimation of Batteries for Automotive Applications




Abstract
1. Introduction
- Energy Management Optimization: In various battery-powered systems, precise SOC estimation is indispensable for efficient energy management [15,16,17]. By accurately gauging the available charge, these algorithms enable optimal utilization of the battery capacity, thus preventing potentially detrimental conditions such as overcharging or over-discharging [18,19,20]. Avoiding these extremes is vital as they can lead to irreversible damage to the battery’s internal chemistry and structure, significantly compromising its overall lifespan and performance [21,22,23]. Implementing accurate SOC estimation techniques facilitates intelligent energy utilization strategies, which ensure prolonged battery life and sustained system performance over extended operational periods [24,25,26].
- Enhanced Safety Measures: The accuracy of SOC estimation is directly linked to ensuring the safety and integrity of battery-powered systems [27,28,29]. Inaccurate SOC determination can lead to scenarios of overcharging or over-discharging, exacerbating the risk of critical safety hazards such as thermal runaway [30,31,32]. Uncontrolled thermal runaway has the potential to trigger severe consequences, including battery failure, fire hazards, and even catastrophic explosions, thereby posing serious threats to both the equipment and personnel associated with the system [33,34,35]. Hence, the development of precise and reliable SOC estimation algorithms plays a pivotal role in enhancing the overall safety and risk management strategies within battery-dependent applications [36,37,38].
- Proactive Battery Health Monitoring: Accurate estimation of SOH is instrumental to effective battery health monitoring and enables the timely detection of degradation and performance decline [39,40,41]. These algorithms facilitate the assessment of critical battery parameters, such as capacity fade, impedance changes, and chemical degradation, to provide insight into the battery’s remaining useful life (RUL) [42,43,44]. By implementing proactive SOH estimation methodologies, operators can anticipate potential battery failures, initiate timely maintenance interventions, and prevent costly downtime and unplanned disruptions in industrial and automotive operations [45,46,47]. The ability to predict the RUL allows for informed decision-making regarding battery replacement or reconditioning, thereby optimizing maintenance costs and ensuring continuous system reliability [48,49,50].
- Coulomb Counting Method: This widely used method estimates SOC by integrating the current flowing in and out of the battery over time. Despite its simplicity and ease of implementation, the Coulomb counting method is susceptible to cumulative errors arising from measurement inaccuracies, parasitic currents, and changes to the battery capacity caused by aging and temperature fluctuations [51,52]. Calibration and frequent updates are often necessary to mitigate the impact of these factors on the accuracy of SOC estimation, especially over the long term [53,54].
- Voltage Method: The voltage method estimates SOC by measuring the battery’s open-circuit voltage (OCV) and comparing it to a lookup table or a mathematical model. While being noninvasive and relatively simple, this method is affected by temperature variations and the dynamic nature of battery aging [55,56,57], leading to potential inaccuracies in SOC estimation. Moreover, the nonlinear relationship between SOC and OCV necessitates careful calibration and temperature compensation to improve the accuracy of the estimation, particularly in real-world applications where temperature variations are common [58,59,60].
- Kalman Filter Method: This approach leverages a recursive filter algorithm, such as the Kalman filter, in combination with a detailed mathematical model of the battery. The Kalman filter method provides a more accurate estimation of SOC compared to simpler methods such as Coulomb counting and voltage estimation [61,62]. However, its efficacy heavily relies on the accuracy of the underlying battery model, which requires precise knowledge of the battery’s characteristics and behavior under varying operating conditions. Additionally, the implementation of the Kalman filter method demands significant computational resources, limiting its practicality in resource-constrained applications, particularly in the automotive and industrial sectors where real-time performance is critical [63,64,65].
- Neural Network Algorithm: This method involves training a neural network using a dataset of battery measurements to establish a relationship between input parameters (e.g., current, voltage, and temperature) and SOC. The trained neural network is then utilized to predict the SOC based on real-time or historical battery data [66,67]. The neural network algorithm offers enhanced accuracy compared to traditional methods, especially in complex scenarios where the relationships between input parameters and SOC are nonlinear and are challenging to model analytically. Nevertheless, the successful implementation of this algorithm relies heavily on the availability of a substantial and diverse dataset for training the neural network along with significant computational resources for training and inference, which could pose practical challenges in resource-limited applications [68,69].
- Hybrid Algorithm: As the name suggests, a hybrid algorithm combines the strengths of two or more estimation methods to improve the overall accuracy of SOC estimation. For instance, a hybrid algorithm may integrate the coulomb counting method with the Kalman filter technique to compensate for their respective limitations and enhance the accuracy and robustness of SOC estimation [70,71]. By leveraging the complementary strengths of multiple algorithms, the hybrid approach aims to mitigate the impact of individual weaknesses, leading to more reliable SOC estimation in diverse operating conditions and environments [72,73,74].
2. Overview of Battery Systems
- Battery Packs and Cells: The foundational level of the BESS consists of multiple battery packs, each containing interconnected batteries.
- Battery Management System (BMS): Operating at the cellular level, the battery management system (BMS) is responsible for overseeing the individual cells’ performance. It ensures that each cell operates within safe voltage, current, and temperature ranges, which promotes both the safety of the system and the optimal functioning of the batteries. The BMS also undertakes the critical tasks of calibrating and equalizing the SOC across all cells, which promotes uniform performance [95].
- Power Conversion System (PCS): The battery system interfaces with inverters through a specific power electronic level known as the power conversion system (PCS). Typically organized into a conversion unit, the PCS handles the conversion of stored energy into AC power. Additionally, it integrates auxiliary services necessary for comprehensive monitoring and controlling the BESS [96,97].
- Energy Management System (EMS): At a higher level, the energy management system (EMS) takes charge of monitoring and controlling the energy flow within the BESS. This system ensures that the power flow aligns with specific applications and operational requirements. It plays a pivotal role in optimizing the utilization of stored energy based on real-time demands and conditions [98,99].
- Supervisory Control and Data Acquisition (SCADA) System: The broader monitoring and control aspects are often encapsulated within the supervisory control and data acquisition (SCADA) system. This system provides a comprehensive overview of the entire BESS, including its various components and their performance. It acts as the centralized control hub for monitoring the overall health and status of the system [100].
- Transformer Connections: Finally, the BESS interfaces with transformers to manage the voltage levels. Depending on the system’s size, there are connections with medium-voltage/low-voltage transformers and, in larger systems, high-voltage/medium-voltage transformers located in dedicated substations. These transformers facilitate the integration of the BESS with the broader electrical infrastructure [101,102].
- Performance Optimization: An accurate battery model allows the BMS to monitor and control battery performance efficiently. With a precise model, it is possible to optimize the battery’s charging and discharging, which maximizes its lifespan and ensures safe and reliable operation [103].
- Planning and Thermal Control: Modeling helps with monitoring the battery temperature, which is a critical parameter for safety and durability. Thermal models enable the BMS to predict and control temperature variations in order to avoid overheating situations that could damage the battery [104].
- Wear Management: Battery models help estimate wear over time, which assists the BMS with efficiently managing the battery’s lifespan. This is particularly important in automotive systems, where the battery must operate under varying conditions and last for an extended period [105].
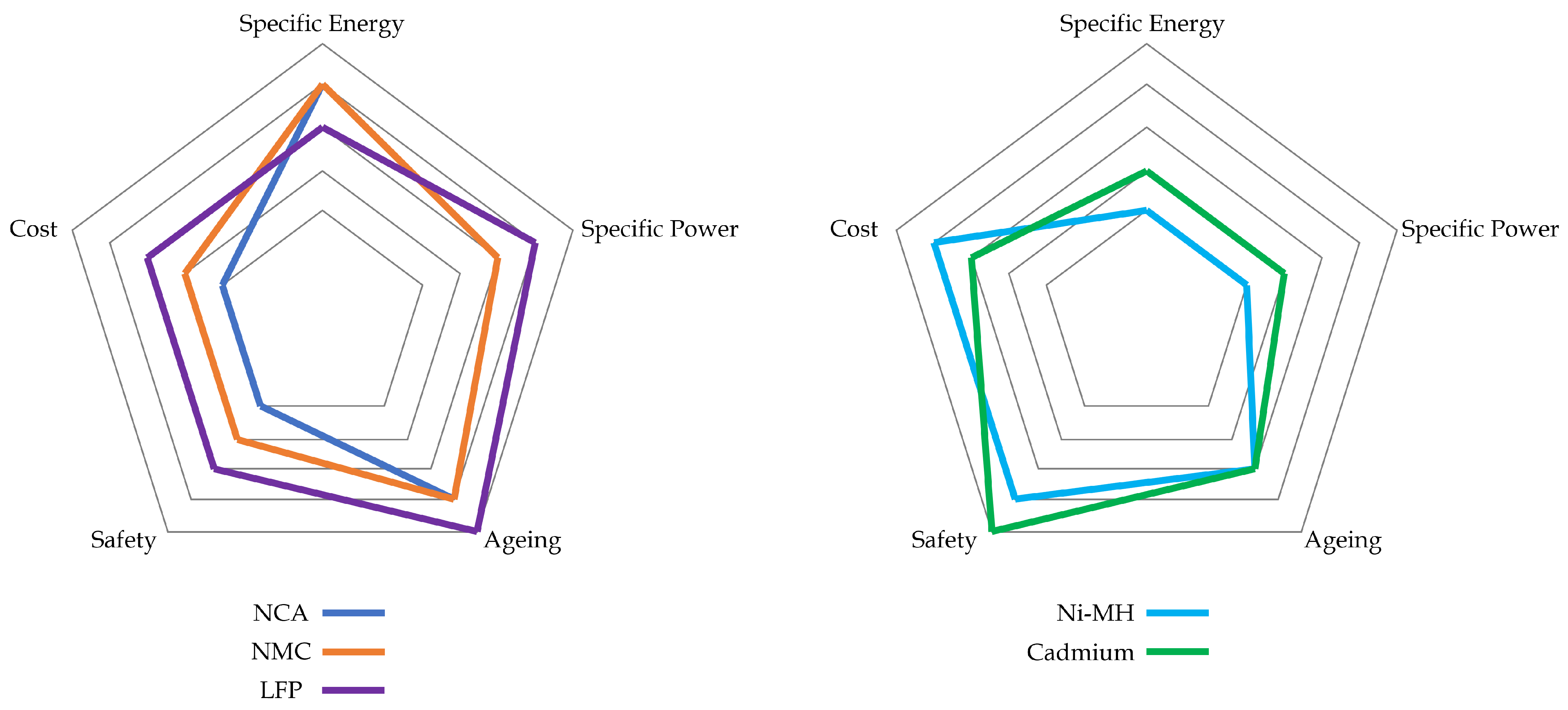
- Similarities in Basic Behaviors: Even though batteries may use different chemical technologies (e.g., lithium, lead–acid, and nickel–metal hybrid), there are similarities in basic behaviors such as charging, discharging, temperature, and internal resistance.
- General Parameters: Mathematical models rely on general parameters like internal resistance, capacity, and open-circuit voltage that are commonly present in all batteries. These parameters can be measured or experimentally derived to fit specific batteries [106].
- Physical–Mathematical Approach: Models often rely on physical and mathematical equations reflecting fundamental principles of battery operation. These principles are applicable to many different technologies and allow for some universality in models [107].
- Adaptability through Configurable Parameters: Models can be configured and adapted using technology-specific parameters. This allows BMS designers to customize models to fit the specific characteristics of the battery they are managing [108].
3. Overview of Modeling Approaches
3.1. Empirical Modeling
- Semi-empirical model: A semi-empirical approach combines elements of theoretical understanding with empirical data, which allows for a more accurate representation of the electrochemical processes within Li-ion batteries [109,110]. By incorporating both theoretical and experimental components, this model can provide insights into the battery’s performance over its lifetime and aid with the prediction of degradation and capacity loss [111,112].
- Empirical data hybrid driven approach: This approach combines empirical data with other predictive methods to assess the remaining useful life of Li-ion batteries. By considering capacity diving, this model offers insights into the battery’s degradation patterns and remaining performance, which is crucial for implementing effective battery management strategies and prolonging the battery’s lifespan [113,114].
- Empirical aging model: An empirical aging model is specifically designed to evaluate the impact of different operating strategies, such as vehicle-to-grid (V2G) approaches, on the lifespan of Li-ion batteries. By simulating the effects of various usage scenarios, this model helps with understanding how different operational conditions can affect the long-term performance and aging of the battery and enables the development of effective management protocols [115,116,117].
3.2. Equivalent Circuit Modeling
- -
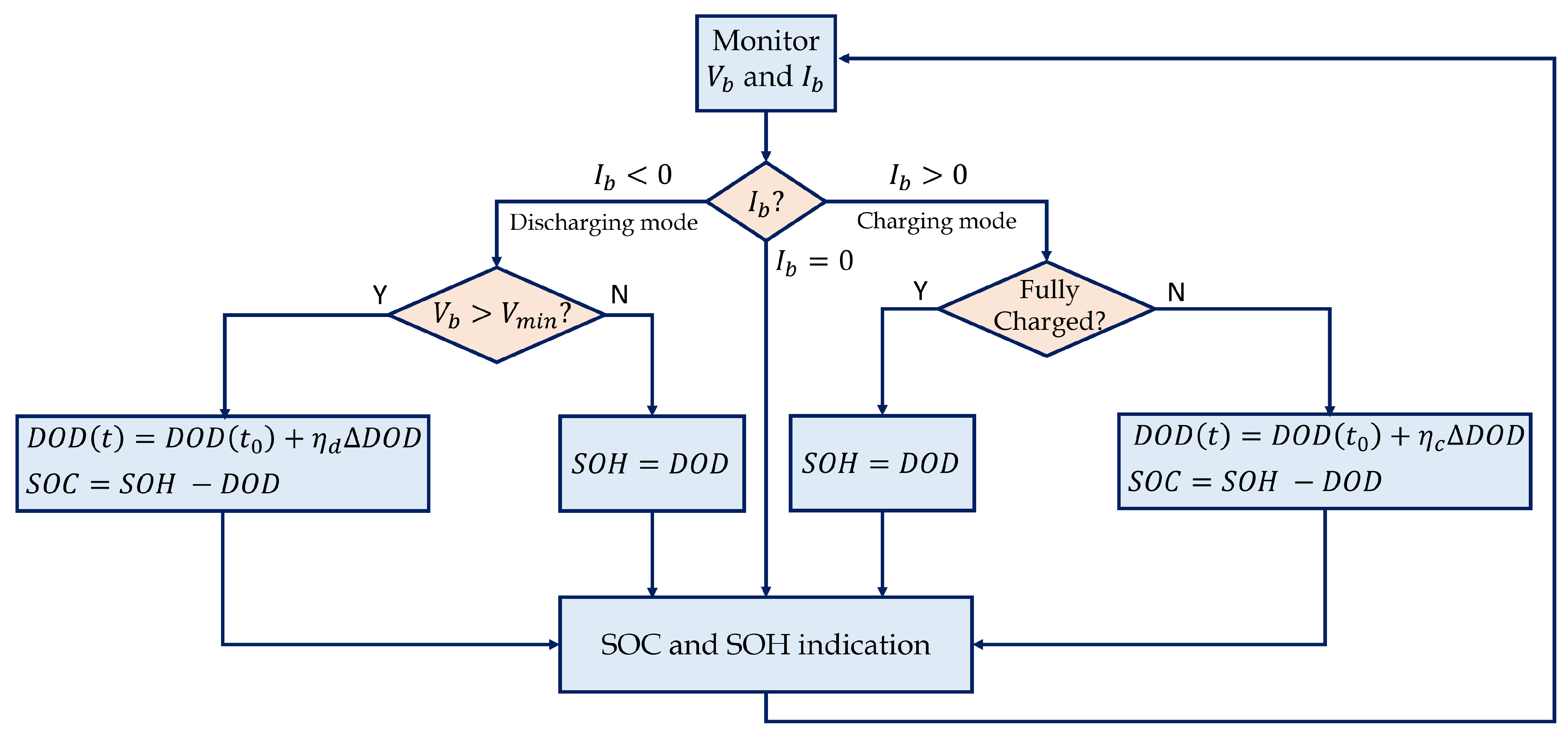
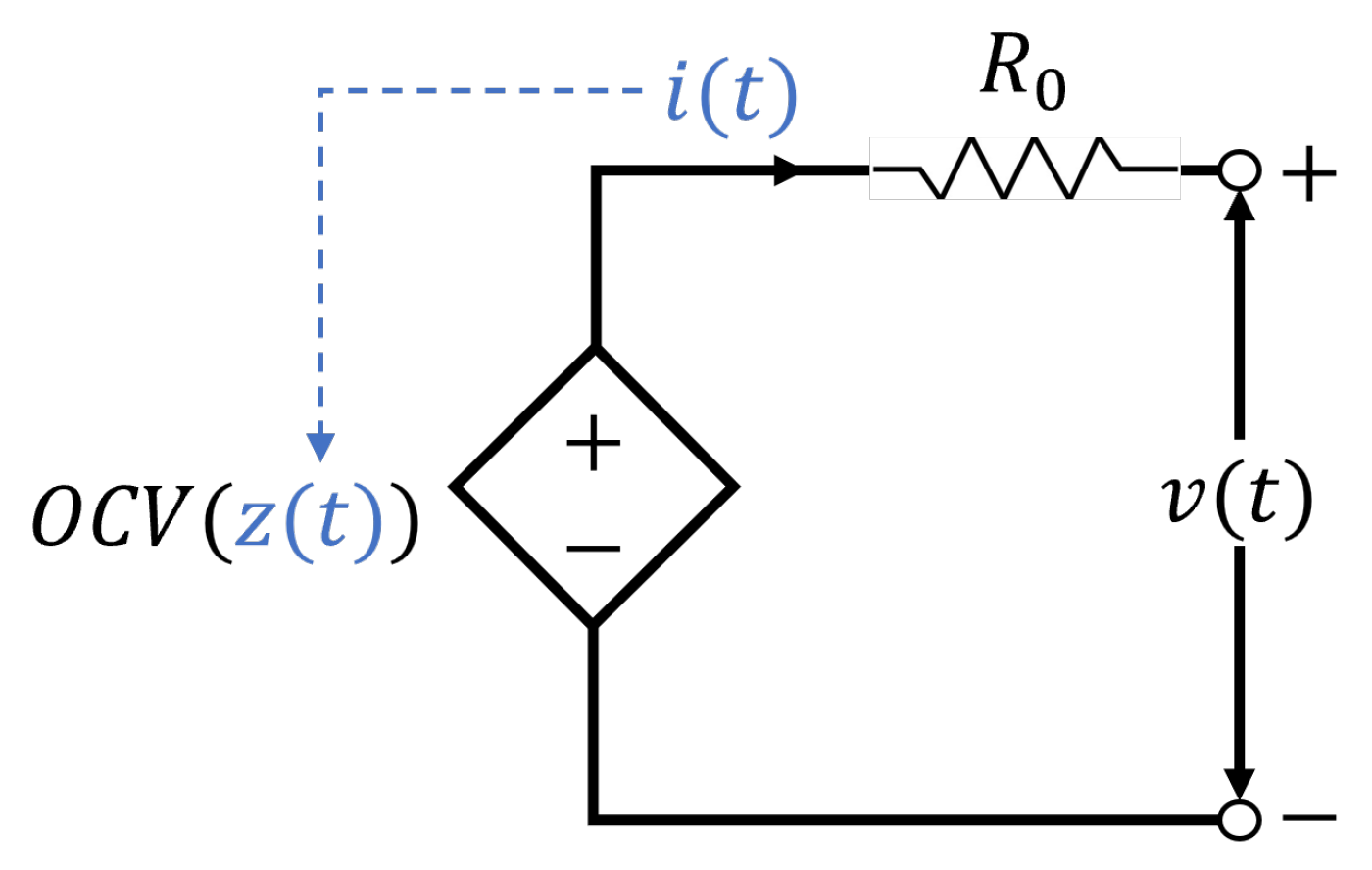
- For estimating the total charge Q, a simple and effective method is to bring the cell/battery to the maximum rated voltage (corresponding to the maximum level of ), apply a load, and directly measure , i.e., directly monitor the “amperes per hour” , up to the minimum rated voltage (corresponding to the minimum level of ).
- -
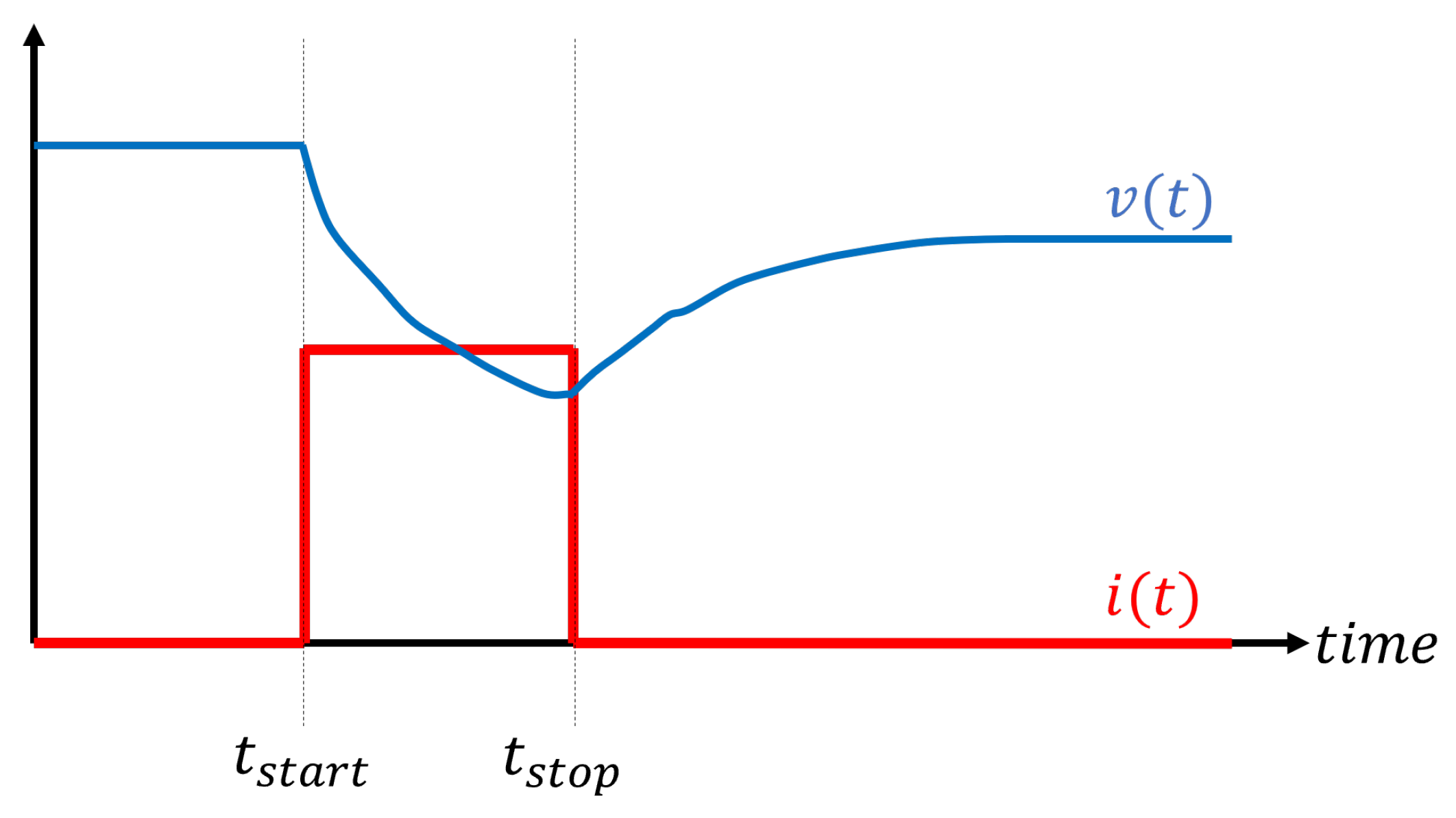
- For estimating the efficiency , by opposite procedure, one starts from the full discharge condition of the battery and slowly brings it up to the maximum nominal voltage level () from the minimum (); one directly monitors . This results in an estimated .
- -
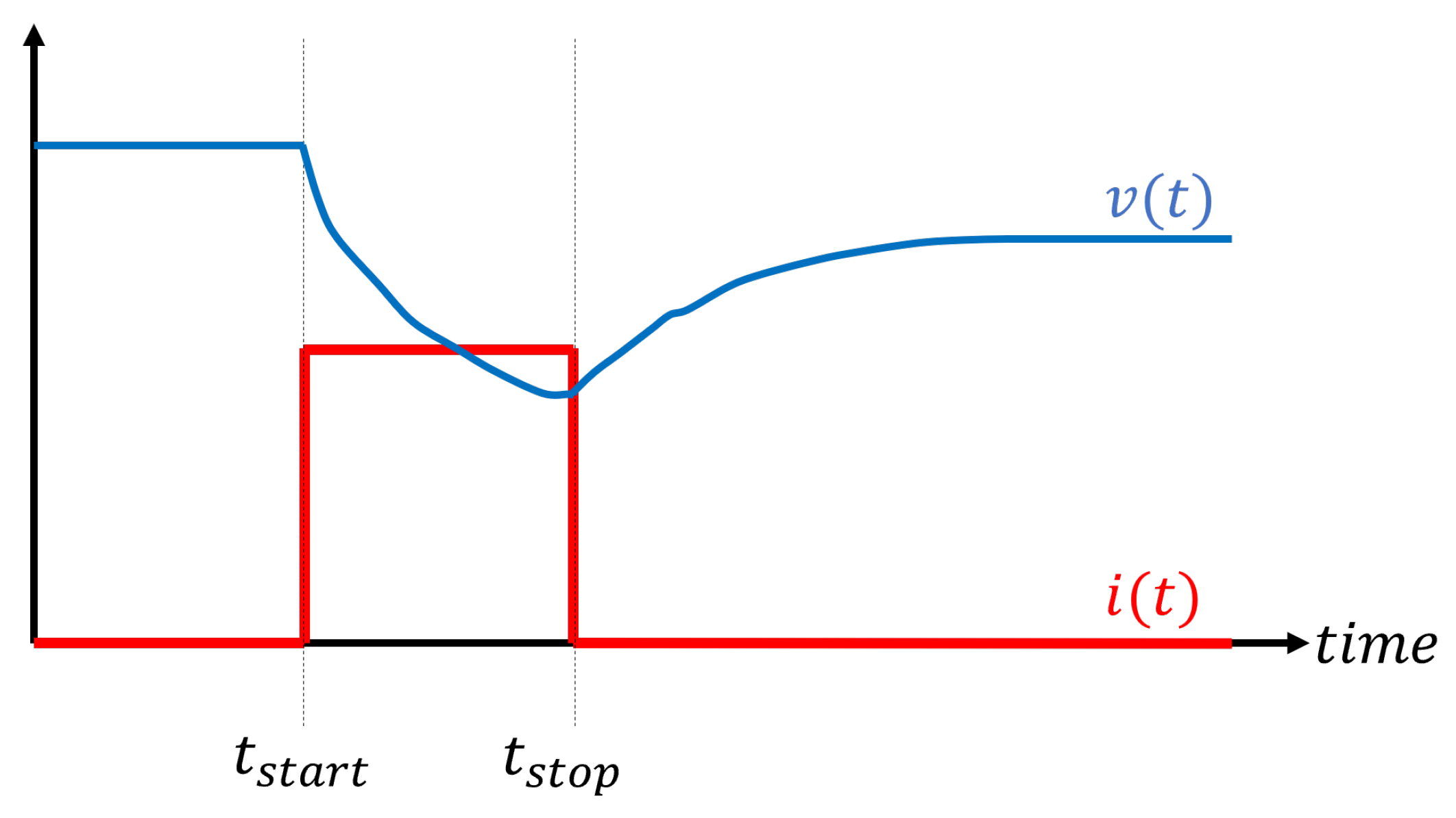
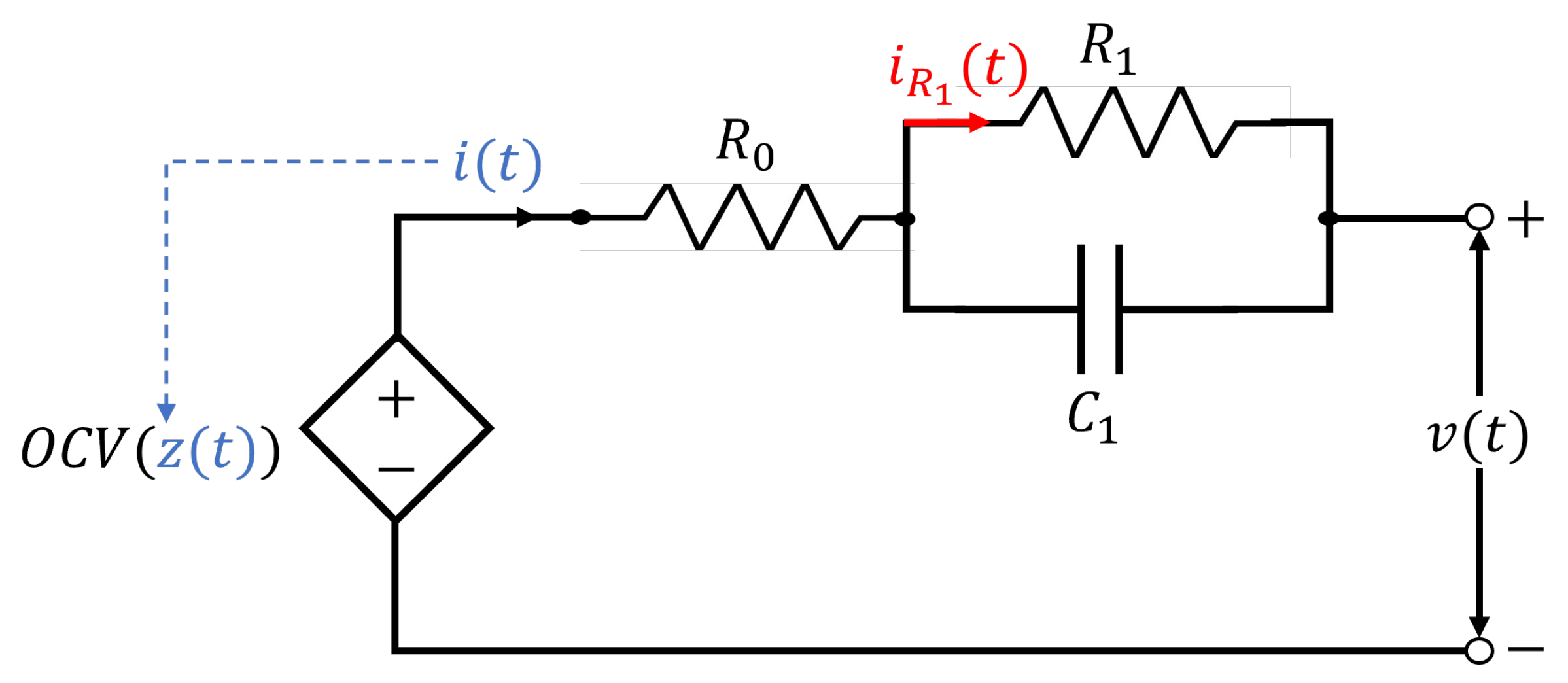
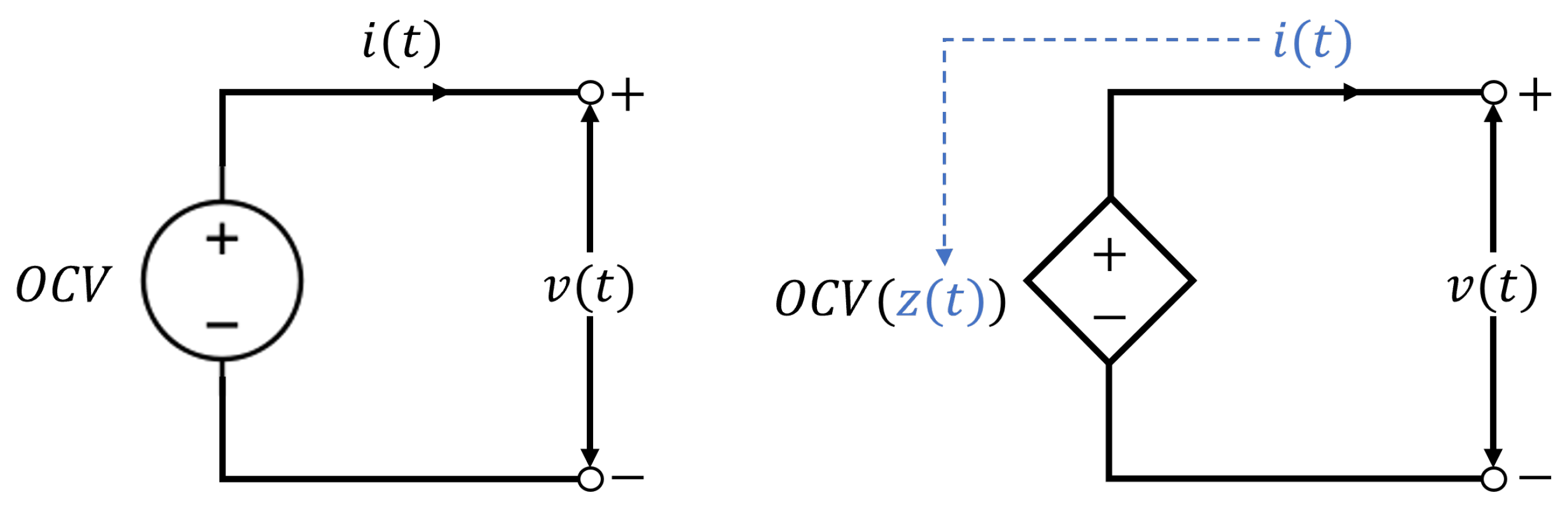
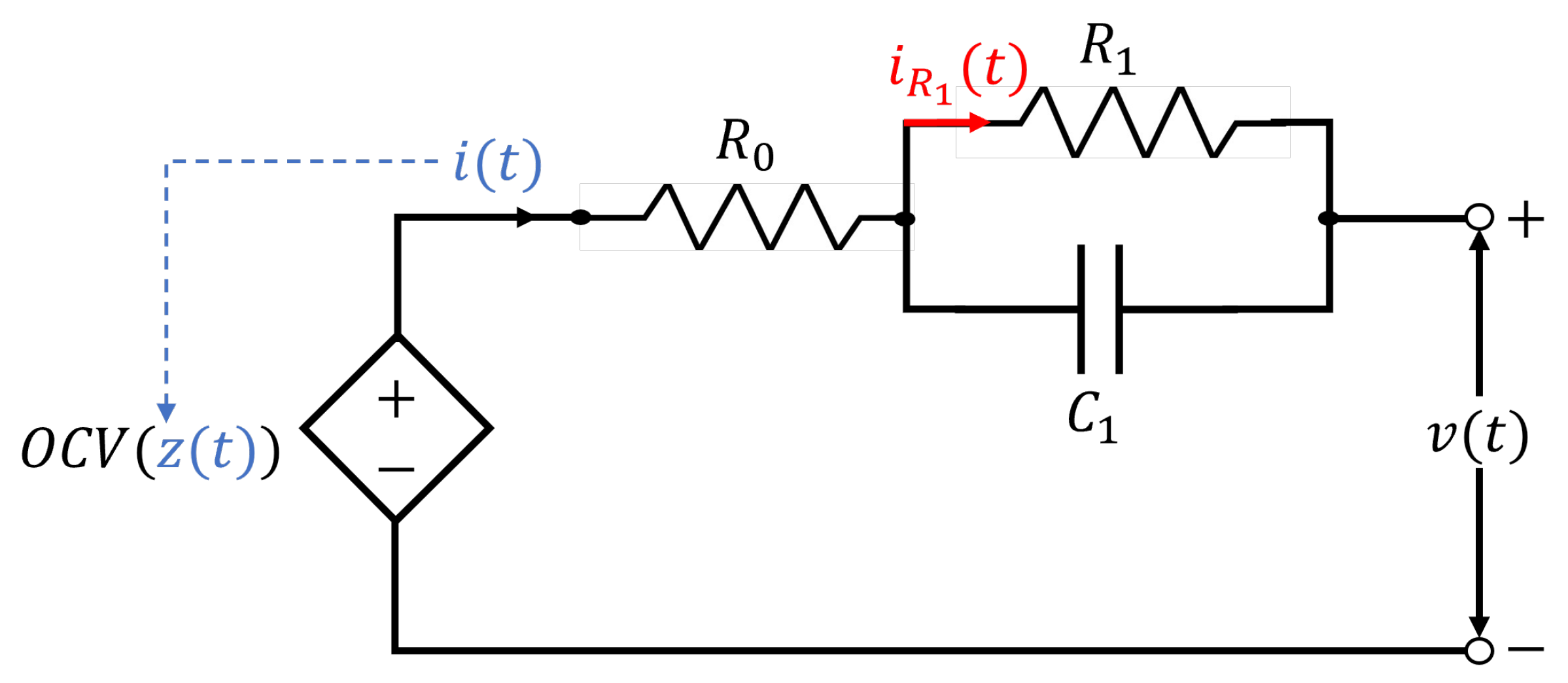
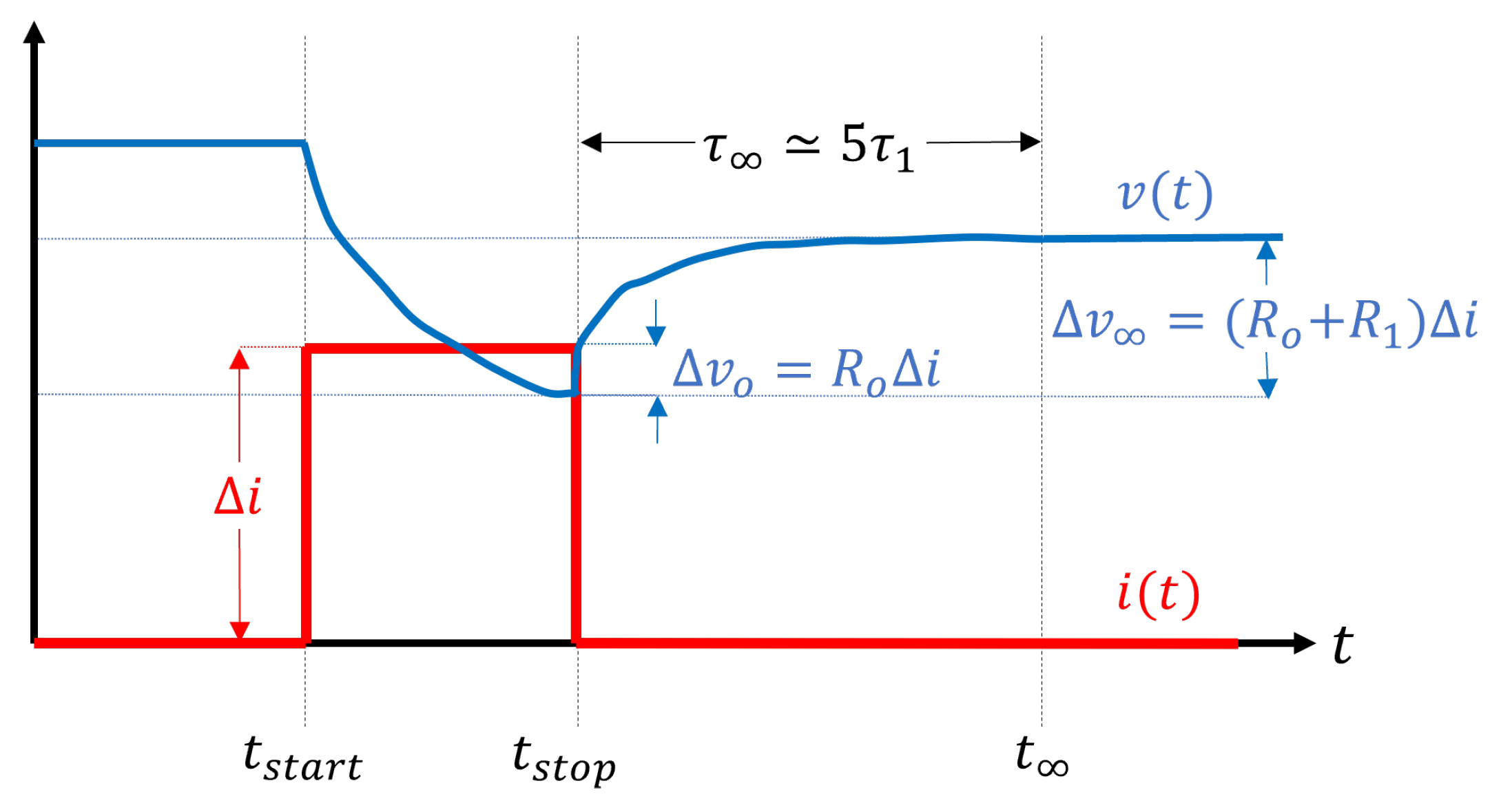
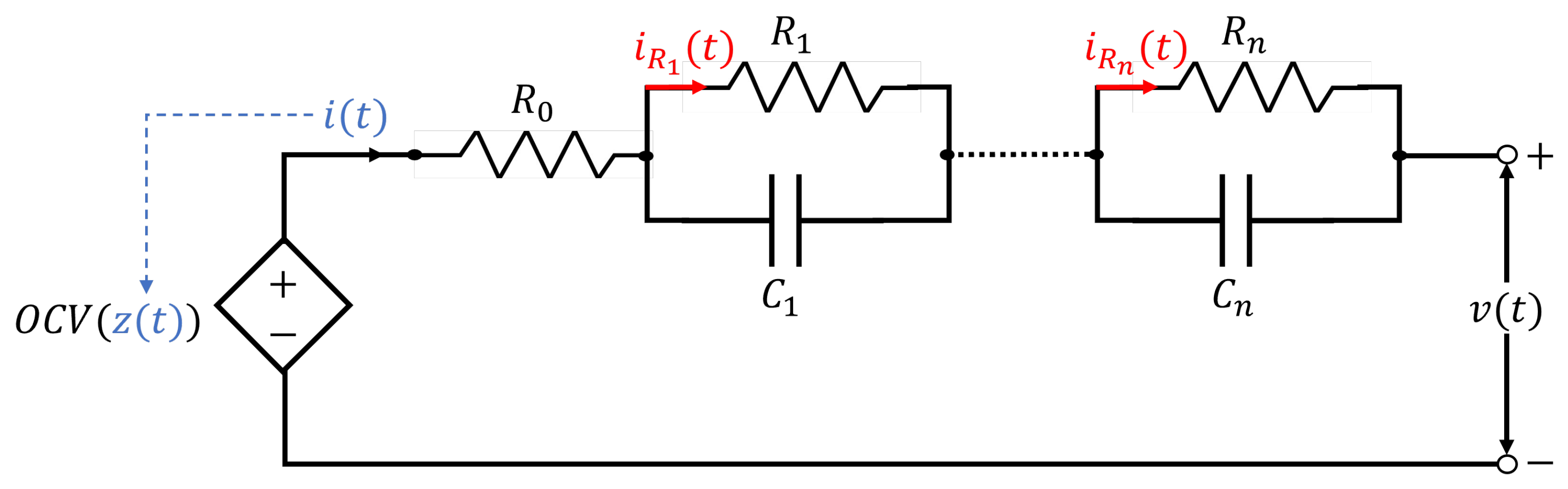
- Estimation of the circuit parameters is done during the “Pulse Current Test” analysis and by applying some simple concepts of linear dynamic systems analysis to the graphical meaning of the step response. In particular, reference is made to the situation depicted in Figure 6. As can be seen, at , the voltage has a rising transient characterized by a “vertical” stretch, which can be associated with the term , so from the direct voltage measurement it is possible to derive the value and consequently to obtain an estimate of the parameter. Similarly, one can associate the steady-state value of the voltage with the series of resistors to procedurally derive as well. As for the value of , we can consider the pseudo-empirical relationship between the settling time and characteristic constant.
3.3. Other Models
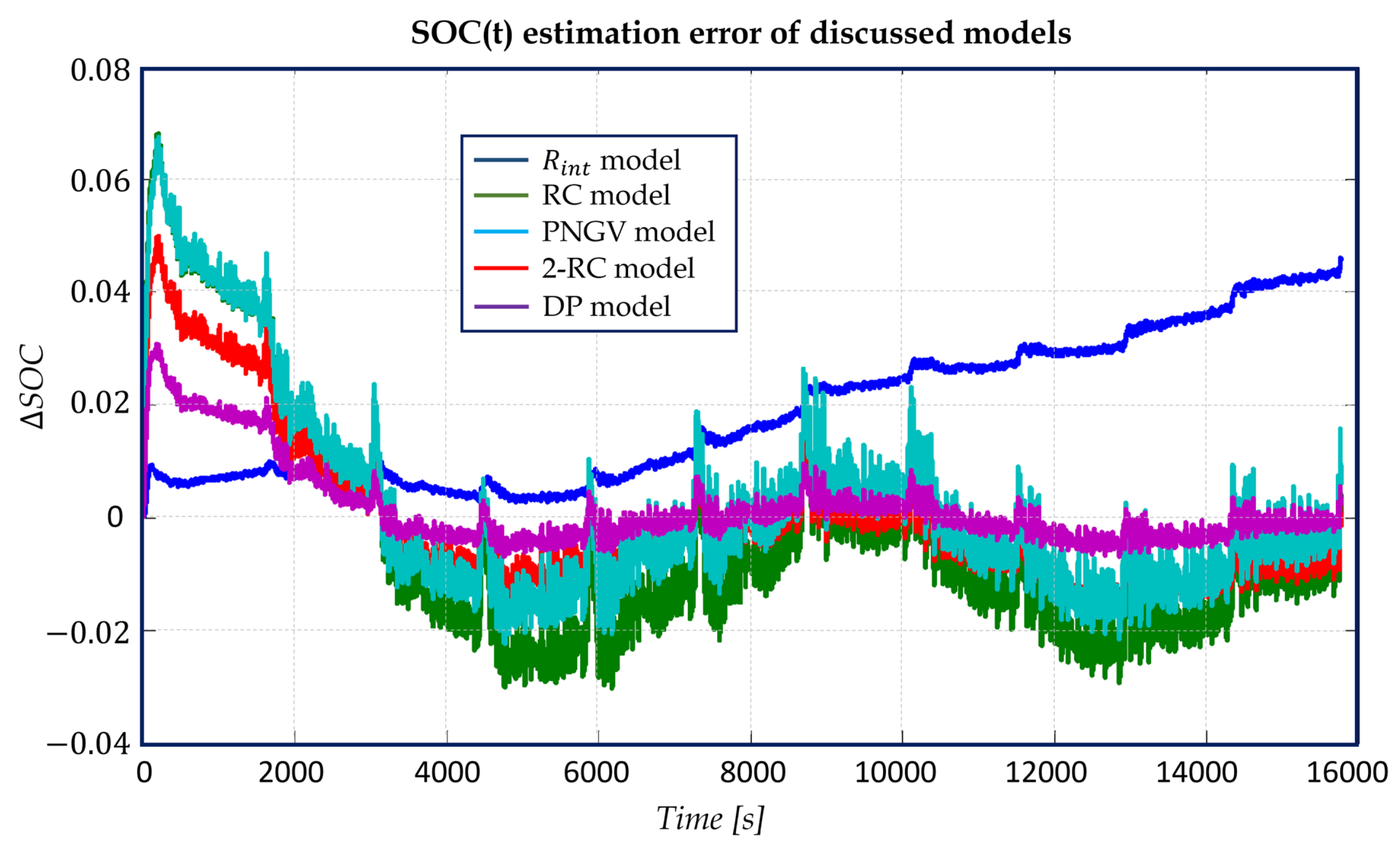
- Accurate Description: The PNGV model provides an accurate description of the discharge behavior of lithium batteries.
- SOC Estimation: It enables precise SOC estimation for Li-ion batteries based on multi-model switching.
- Suitability for Electric Vehicles: The model is suitable for modeling the monomers and modules of lithium–iron–phosphate batteries with higher accuracy, especially when electric vehicles are running in a city.
- Complexity: The model may involve a relatively complex equivalent circuit and state space expression, which may require computational resources and expertise to implement effectively.
- Parameter Sensitivity: Some parameters of the model are related to environmental factors and battery charge and discharge, which may introduce sensitivity and require careful calibration.
- Dynamic Performance: The DP model is known for its excellent dynamic performance, which makes it valuable for understanding the transient response during power transfer to and from the battery.
- Accurate SOC Estimation: It provides the most accurate SOC estimation compared to other models, which is crucial for effective battery management systems and electric vehicles.
- Flexibility: The DP model is considered one of the most flexible methods for battery management systems as it allows for optimized charging profiles based on proper battery models.
- Complexity: The model’s dynamic performance and accuracy may come with increased complexity, which may require a sophisticated implementation and computational resources.
- Parameter Sensitivity: Like many battery models, the DP model may exhibit sensitivity to different SOC initial values, which could impact its robustness in practical applications.
- Modeling Slow Dynamic Processes: The Warburg impedance allows for the modeling of slow dynamic processes happening inside the battery, such as diffusion processes, to provide a more comprehensive representation of the battery’s behavior.
- Accurate Representation of Battery Response: By integrating the Warburg impedance, battery models can accurately represent the response of the battery at low frequencies, which is essential for understanding the battery’s behavior during different operating conditions and charging modes.
- Improved Dynamic Model Performance: The integration of the Warburg impedance has been shown to improve the performance of dynamic battery models, making them more effective for various charging modes, including those intended for electric vehicle charging.
- Increased Model Complexity: The integration of the Warburg impedance may lead to increased model complexity, which may require additional computational resources and expertise for implementation.
- Effect on Low-Frequency Response: The Warburg impedance primarily affects the response at low frequencies, and its integration may introduce challenges related to parameter adjustment and the transformation of visual information obtained from impedance measurements into evolving parameters.
4. Main SOC/SOH Estimation Algorithms
4.1. Coulomb Counting Method
4.2. Open-Circuit Voltage Method
4.3. Kalman-Filter-Based Method
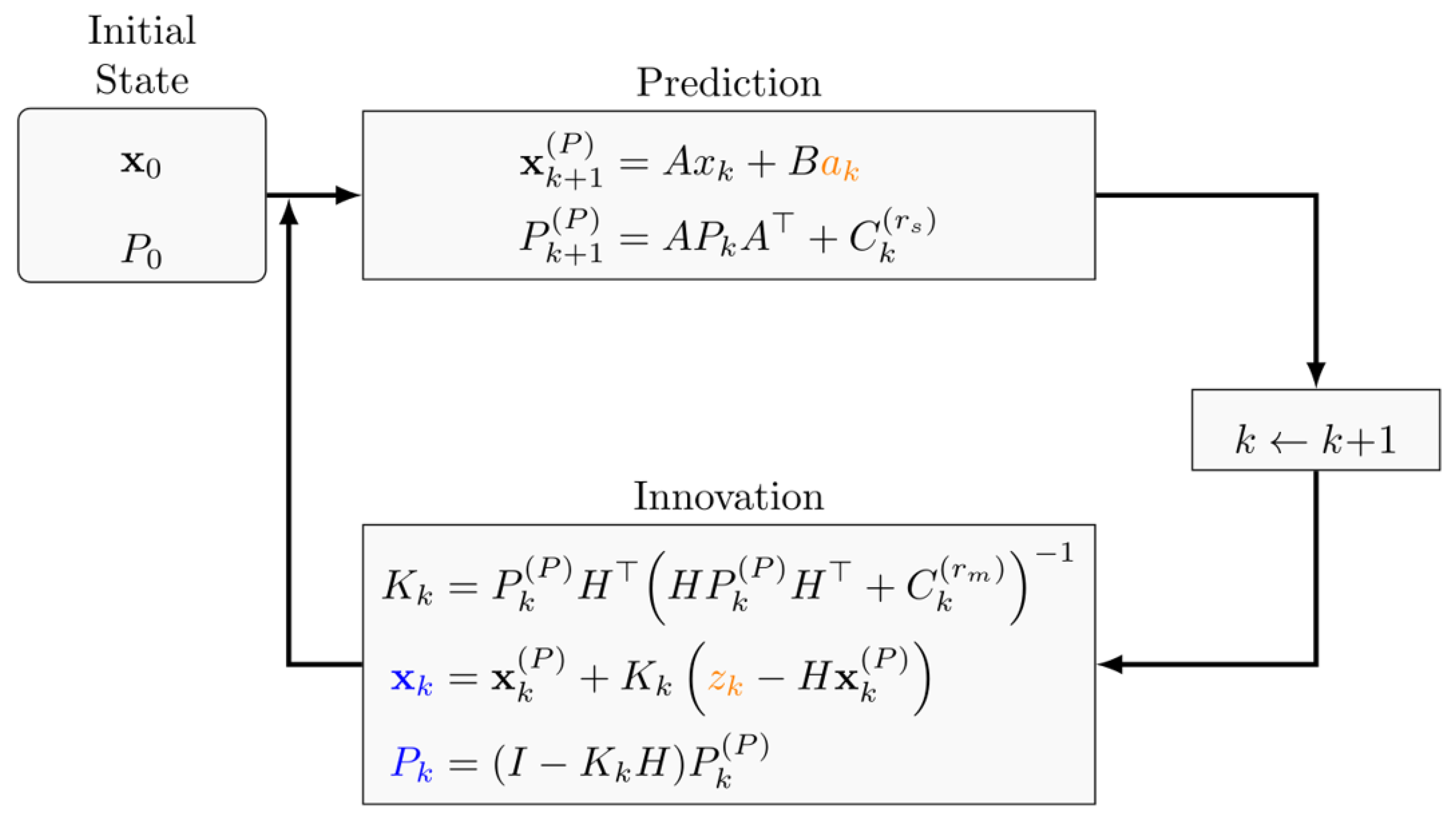
- 1
- Prediction Phase:
- 1.a
- State prediction:
- 1.b
- Covariance prediction:where is the a priori estimate of the state at time k; is the a priori covariance of the estimation error; Q represents the process noise.
- 2
- Correction Phase:
- 2.a
- Kalman gain calculation:
- 2.b
- Corrected state estimation:
- 2.c
- Covariance update:where is the Kalman gain at time k; R represents the measurement noise covariance matrix.
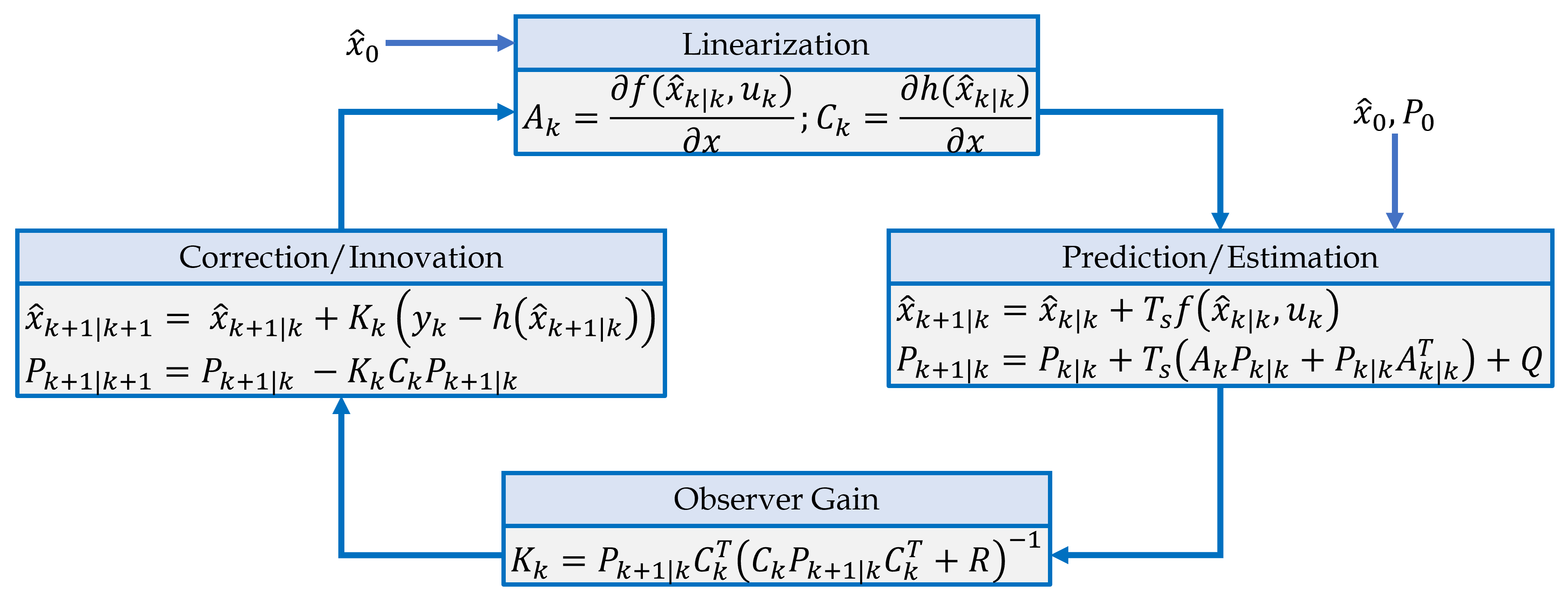
- 1
- Prediction Step:
- 1.a
- State prediction:
- 1.b
- Error covariance prediction:
- 2
- Correction Step:
- 2.a
- Compute the Kalman gain:
- 2.b
- Update the state estimate:
- 2.c
- Update the error covariance:
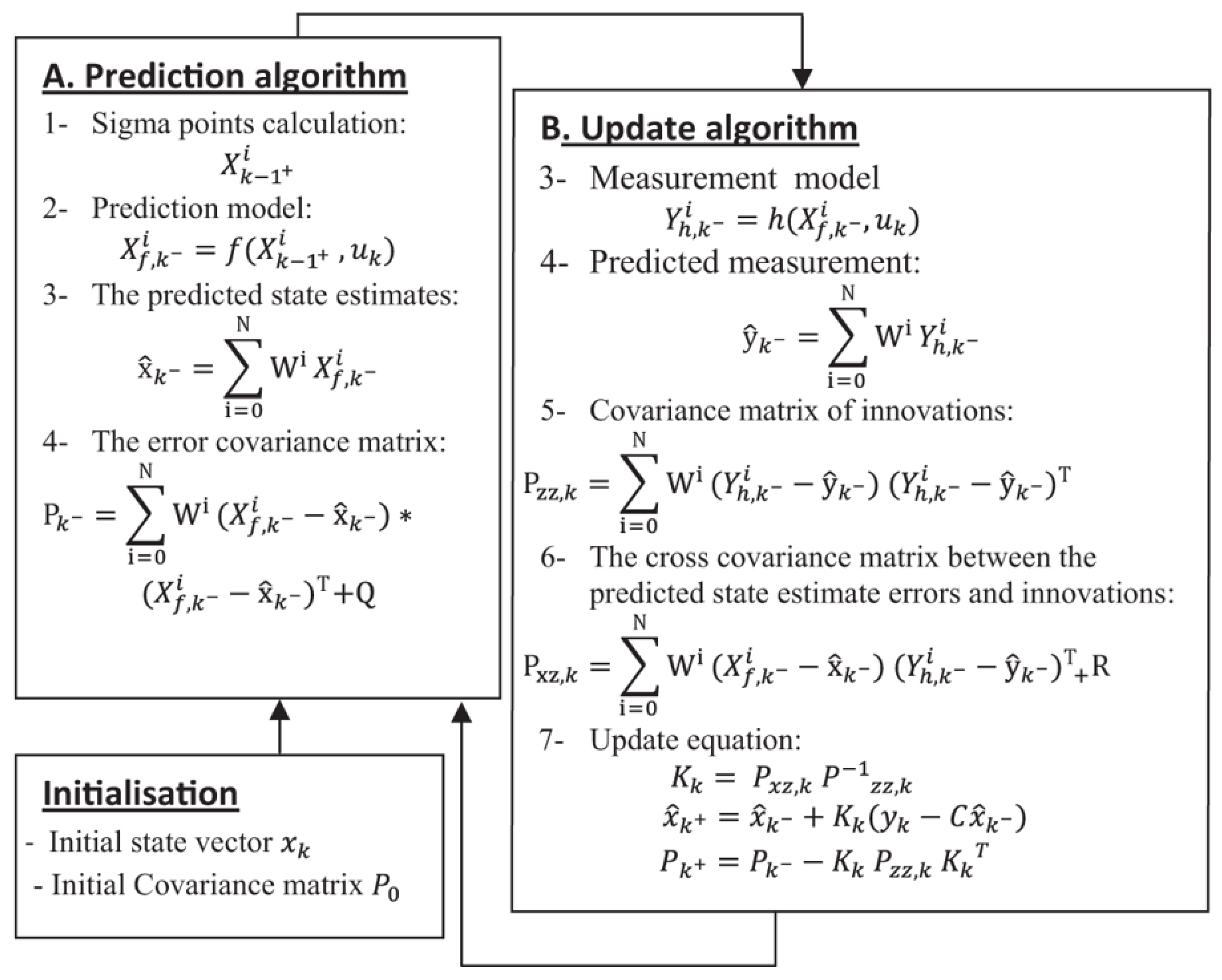
- 1
- Prediction Step:
- 1.a
- Generate sigma points:
- 1.b
- Propagate sigma points through the nonlinear process model:
- 1.c
- Compute predicted state and covariance:
- 2
- Correction Step:
- 2.a
- Propagate sigma points through the observation model:
- 2.b
- Compute the predicted measurement mean and covariance:
- 2.c
- Compute the cross-covariance matrix:
- 2.d
- Compute the Kalman gain:
- 2.e
- Update the state estimate:
- 2.f
- Update the error covariance:
4.4. AI-Based Methods
4.4.1. Bayesian Neural Network
4.4.2. Support Vector Machines
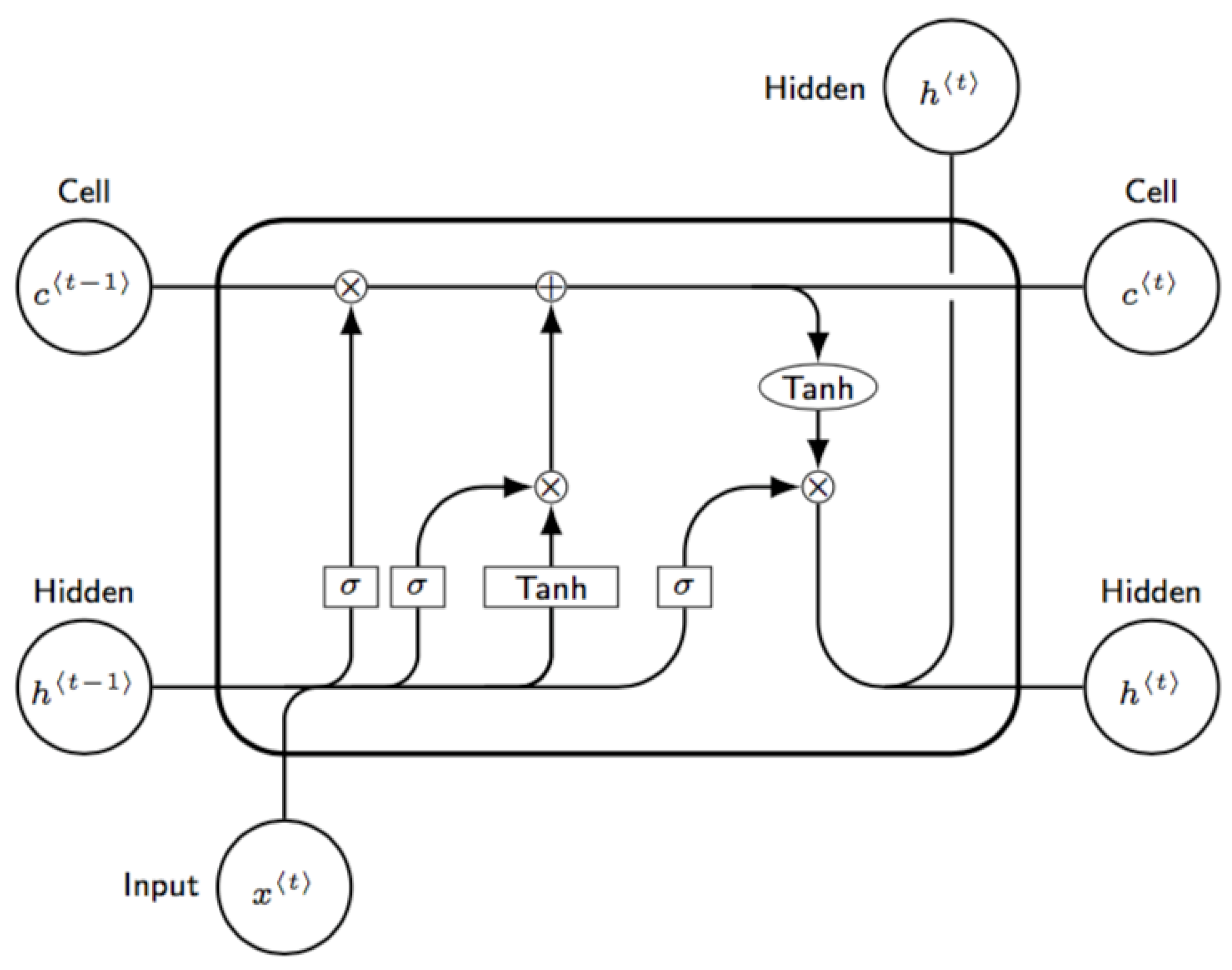
4.4.3. Long Short-Term Memory
4.5. Method Comparison Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dini, P.; Saponara, S. Cogging torque reduction in brushless motors by a nonlinear control technique. Energies 2019, 12, 2224. [Google Scholar]
- Dini, P.; Saponara, S.; Colicelli, A. Overview on Battery Charging Systems for Electric Vehicles. Electronics 2023, 12, 4295. [Google Scholar] [CrossRef]
- Pacini, F.; Matteo, S.D.; Dini, P.; Fanucci, L.; Bucchi, F. Innovative Plug-and-Play System for Electrification of Wheel-Chairs. IEEE Access 2023, 11, 89038–89051. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Processor-in-the-loop validation of a gradient descent-based model predictive control for assisted driving and obstacles avoidance applications. IEEE Access 2022, 10, 67958–67975. [Google Scholar]
- Dini, P.; Saponara, S.; Chakraborty, S.; Hosseinabadi, F.; Hegazy, O. Experimental Characterization and Electro-Thermal Modeling of Double Side Cooled SiC MOSFETs for Accurate and Rapid Power Converter Simulations. IEEE Access 2023, 11, 79120–79143. [Google Scholar] [CrossRef]
- Pierpaolo, D.; Saponara, S. Control system design for cogging torque reduction based on sensor-less architecture. In Proceedings of the Applications in Electronics Pervading Industry, Environment and Society, Pisa, Italy, 11–13 September 2019; pp. 309–321. [Google Scholar]
- Dini, P.; Saponara, S. Design of adaptive controller exploiting learning concepts applied to a BLDC-based drive system. Energies 2020, 13, 2512. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Electro-thermal model-based design of bidirectional on-board chargers in hybrid and full electric vehicles. Electronics 2021, 11, 112. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Review on model based design of advanced control algorithms for cogging torque reduction in power drive systems. Energies 2022, 15, 8990. [Google Scholar]
- Dini, P.; Ariaudo, G.; Botto, G.; Greca, F.L.; Saponara, S. Real-time electro-thermal modelling & predictive control design of resonant power converter in full electric vehicle applications. IET Power Electron. 2023, 16, 2045–2064. [Google Scholar]
- Bernardeschi, C.; Dini, P.; Domenici, A.; Saponara, S. Co-simulation and Verification of a Non-linear Control System for Cogging Torque Reduction in Brushless Motors. In Proceedings of the Software Engineering and Formal Methods: SEFM 2019 Collocated Workshops: CoSim-CPS, ASYDE, CIFMA, and FOCLASA, Oslo, Norway, 16–20 September 2019; Revised Selected Papers 17. Springer: Berlin/Heidelberg, Germany, 2020; pp. 3–19. [Google Scholar]
- Cosimi, F.; Dini, P.; Giannetti, S.; Petrelli, M.; Saponara, S. Analysis and design of a non-linear MPC algorithm for vehicle trajectory tracking and obstacle avoidance. In Proceedings of the Applications in Electronics Pervading Industry, Environment and Society, APPLEPIES 2020, Berlin, Germany, 19–20 November 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 229–234. [Google Scholar]
- Dini, P.; Saponara, S. Model-based design of an improved electric drive controller for high-precision applications based on feedback linearization technique. Electronics 2021, 10, 2954. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Design of an observer-based architecture and non-linear control algorithm for cogging torque reduction in synchronous motors. Energies 2020, 13, 2077. [Google Scholar]
- Wang, Y.; Zhang, Y.; Zhang, C.; Zhou, J.; Hu, D.; Yi, F.; Fan, Z.; Zeng, T. Genetic algorithm-based fuzzy optimization of energy management strategy for fuel cell vehicles considering driving cycles recognition. Energy 2023, 263, 126112. [Google Scholar]
- Geng, W.; Lou, D.; Wang, C.; Zhang, T. A cascaded energy management optimization method of multimode power-split hybrid electric vehicles. Energy 2020, 199, 117224. [Google Scholar] [CrossRef]
- Dong, X.; Li, X.; Cheng, S. Energy Management Optimization of Microgrid Cluster Based on Multi-Agent-System and Hierarchical Stackelberg Game Theory. IEEE Access 2020, 8, 206183–206197. [Google Scholar] [CrossRef]
- Teng, T.; Zhang, X.; Dong, H.; Xue, Q. A comprehensive review of energy management optimization strategies for fuel cell passenger vehicle. Int. J. Hydrogen Energy 2020, 45, 20293–20303. [Google Scholar]
- Xing, X.; Xie, L.; Meng, H. Cooperative energy management optimization based on distributed MPC in grid-connected microgrids community. Int. J. Electr. Power Energy Syst. 2019, 107, 186–199. [Google Scholar] [CrossRef]
- Mellouk, L.; Ghazi, M.; Aaroud, A.; Boulmalf, M.; Benhaddou, D.; Zine-Dine, K. Design and energy management optimization for hybrid renewable energy system-case study: Laayoune region. Renew. Energy 2019, 139, 621–634. [Google Scholar]
- Hou, X.; Wang, J.; Huang, T.; Wang, T.; Wang, P. Smart Home Energy Management Optimization Method Considering Energy Storage and Electric Vehicle. IEEE Access 2019, 7, 144010–144020. [Google Scholar] [CrossRef]
- Khayyam, S.; Berr, N.; Razik, L.; Fleck, M.; Ponci, F.; Monti, A. Railway System Energy Management Optimization Demonstrated at Offline and Online Case Studies. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3570–3583. [Google Scholar] [CrossRef]
- Qi, J.; Lai, C.; Xu, B.; Sun, Y.; Leung, K.S. Collaborative Energy Management Optimization Toward a Green Energy Local Area Network. IEEE Trans. Ind. Inform. 2018, 14, 5410–5418. [Google Scholar] [CrossRef]
- EI-Bidairi, K.S.; Duc Nguyen, H.; Jayasinghe, S.D.G.; Mahmoud, T.S. Multiobjective Intelligent Energy Management Optimization for Grid-Connected Microgrids. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- He, H.; Niu, Z.; Wang, Y.; Huang, R.; Shou, Y. Energy management optimization for connected hybrid electric vehicle using offline reinforcement learning. J. Energy Storage 2023, 72, 108517. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, S.; Shen, S.; Liu, Y.; Guo, F.; Zhang, Y. Co-optimization of velocity planning and energy management for autonomous plug-in hybrid electric vehicles in urban driving scenarios. Energy 2023, 263, 126060. [Google Scholar] [CrossRef]
- Zhu, Y.; Dong, Z.; Cheng, Z.; Huang, X.; Dong, Y.; Zhang, Z. Neural network extended state-observer for energy system monitoring. Energy 2023, 263, 125736. [Google Scholar]
- Amini, F.; Ghassemzadeh, S.; Rostami, N.; Tabar, V.S. Electrical energy systems resilience: A comprehensive review on definitions, challenges, enhancements and future proceedings. IET Renew. Power Gener. 2023, 17, 1835–1858. [Google Scholar] [CrossRef]
- Barykina, Y.; Chernykh, A. Ensuring of reliability and security of energy systems in the Russian Federation. IOP Conf. Ser. Earth Environ. Sci. 2022, 990, 012001. [Google Scholar]
- Pong, P.W.; Annaswamy, A.M.; Kroposki, B.; Zhang, Y.; Rajagopal, R.; Zussman, G.; Poor, H.V. Cyber-enabled grids: Shaping future energy systems. Adv. Appl. Energy 2021, 1, 100003. [Google Scholar] [CrossRef]
- Zografopoulos, I.; Ospina, J.; Liu, X.; Konstantinou, C. Cyber-Physical Energy Systems Security: Threat Modeling, Risk Assessment, Resources, Metrics, and Case Studies. IEEE Access 2021, 9, 29775–29818. [Google Scholar] [CrossRef]
- Choo, B.L.; Go, Y.I. Energy storage for large scale/utility renewable energy system-An enhanced safety model and risk assessment. Renew. Energy Focus 2022, 42, 79–96. [Google Scholar] [CrossRef]
- O’Dwyer, E.; Pan, I.; Acha, S.; Shah, N. Smart energy systems for sustainable smart cities: Current developments, trends and future directions. Appl. Energy 2019, 237, 581–597. [Google Scholar]
- Liu, L.; Wang, D.; Hou, K.; Jia, H.J.; Li, S.Y. Region model and application of regional integrated energy system security analysis. Appl. Energy 2020, 260, 114268. [Google Scholar] [CrossRef]
- Mohan, A.M.; Meskin, N.; Mehrjerdi, H. A comprehensive review of the cyber-attacks and cyber-security on load frequency control of power systems. Energies 2020, 13, 3860. [Google Scholar]
- Azzuni, A.; Aghahosseini, A.; Ram, M.; Bogdanov, D.; Caldera, U.; Breyer, C. Energy security analysis for a 100% renewable energy transition in Jordan by 2050. Sustainability 2020, 12, 4921. [Google Scholar] [CrossRef]
- Lisin, E.; Strielkowski, W.; Chernova, V.; Fomina, A. Assessment of the territorial energy security in the context of energy systems integration. Energies 2018, 11, 3284. [Google Scholar] [CrossRef]
- Martišauskas, L.; Augutis, J.; Krikštolaitis, R. Methodology for energy security assessment considering energy system resilience to disruptions. Energy Strategy Rev. 2018, 22, 106–118. [Google Scholar]
- Li, X.; Yuan, C.; Wang, Z.; He, J.; Yu, S. Lithium battery state-of-health estimation and remaining useful lifetime prediction based on non-parametric aging model and particle filter algorithm. Etransportation 2022, 11, 100156. [Google Scholar] [CrossRef]
- Lao, D.; Shen, Y.; Ren, S.; Lin, S.; Zhang, F. Battery Health Monitoring using Guided Wave Signal Features. In Proceedings of the 50th Annual Review of Progress in Quantitative Nondestructive Evaluation. American Society of Mechanical Engineers, Austin, TX, USA, 23–27 July 2023; Volume 87202, p. V001T09A008. [Google Scholar]
- Semeraro, C.; Caggiano, M.; Olabi, A.G.; Dassisti, M. Battery monitoring and prognostics optimization techniques: Challenges and opportunities. Energy 2022, 255, 124538. [Google Scholar] [CrossRef]
- Lupan, O.; Krüger, H.; Siebert, L.; Ababii, N.; Kohlmann, N.; Buzdugan, A.; Bodduluri, M.T.; Magariu, N.; Terasa, M.I.; Strunskus, T.; et al. Additive manufacturing as a means of gas sensor development for battery health monitoring. Chemosensors 2021, 9, 252. [Google Scholar] [CrossRef]
- Chen, M.; Ma, G.; Liu, W.; Zeng, N.; Luo, X. An overview of data-driven battery health estimation technology for battery management system. Neurocomputing 2023, 532, 152–169. [Google Scholar]
- Liu, F.; Liu, X.; Su, W.; Lin, H.; Chen, H.; He, M. An online state of health estimation method based on battery management system monitoring data. Int. J. Energy Res. 2020, 44, 6338–6349. [Google Scholar] [CrossRef]
- Begni, A.; Dini, P.; Saponara, S. Design and Test of an LSTM-Based Algorithm for Li-Ion Batteries Remaining Useful Life Estimation. In Proceedings of the International Conference on Applications in Electronics Pervading Industry, Environment and Society, Genoa, Italy, 26–27 September 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 373–379. [Google Scholar]
- Dini, P.; Begni, A.; Ciavarella, S.; De Paoli, E.; Fiorelli, G.; Silvestro, C.; Saponara, S. Design and Testing Novel One-Class Classifier Based on Polynomial Interpolation with Application to Networking Security. IEEE Access 2022, 10, 67910–67924. [Google Scholar] [CrossRef]
- Khaleghi, S.; Firouz, Y.; Van Mierlo, J.; Van Den Bossche, P. Developing a real-time data-driven battery health diagnosis method, using time and frequency domain condition indicators. Appl. Energy 2019, 255, 113813. [Google Scholar] [CrossRef]
- Sheikh, S.S.; Anjum, M.; Khan, M.A.; Hassan, S.A.; Khalid, H.A.; Gastli, A.; Ben-Brahim, L. A battery health monitoring method using machine learning: A data-driven approach. Energies 2020, 13, 3658. [Google Scholar] [CrossRef]
- Shah, F.A.; Shahzad Sheikh, S.; Mir, U.I.; Owais Athar, S. Battery Health Monitoring for Commercialized Electric Vehicle Batteries: Lithium-Ion. In Proceedings of the 2019 International Conference on Power Generation Systems and Renewable Energy Technologies (PGSRET), Istanbul, Turkey, 26–27 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Babu, S.; Udayasankaran, J.G.; Krishnan, B.; Reddy Tamanampudi, A.S.; Prem Shaji, S.; Vishwanatham, A.; Raja, P.; Sai Sanagapati, S.S. Smart telemetry kit for proactive health monitoring in rural India: The journey so far and the road ahead. In Proceedings of the 2018 IEEE 20th International Conference on e-Health Networking, Applications and Services (Healthcom), Ostrava, Czech Republic, 17–20 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Xie, J.; Ma, J.; Bai, K. Enhanced coulomb counting method for state-of-charge estimation of lithium-ion batteries based on peukert’s law and coulombic efficiency. J. Power Electron. 2018, 18, 910–922. [Google Scholar]
- Zhao, L.; Lin, M.; Chen, Y. Least-squares based coulomb counting method and its application for state-of-charge (SOC) estimation in electric vehicles. Int. J. Energy Res. 2016, 40, 1389–1399. [Google Scholar] [CrossRef]
- Zine, B.; Marouani, K.; Becherif, M.; Yahmedi, S. Estimation of battery SOC for hybrid electric vehicle using coulomb counting method. Int. J. Emerg. Electr. Power Syst. 2018, 19, 20170181. [Google Scholar]
- Baccouche, I.; Jemmali, S.; Mlayah, A.; Manai, B.; Amara, N.E.B. Implementation of an improved Coulomb-counting algorithm based on a piecewise SOC-OCV relationship for SOC estimation of li-IonBattery. arXiv 2018, arXiv:1803.10654. [Google Scholar]
- Dong, G.; Wei, J.; Zhang, C.; Chen, Z. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4 battery using invariant imbedding method. Appl. Energy 2016, 162, 163–171. [Google Scholar]
- Lavigne, L.; Sabatier, J.; Francisco, J.M.; Guillemard, F.; Noury, A. Lithium-ion Open Circuit Voltage (OCV) curve modelling and its ageing adjustment. J. Power Sources 2016, 324, 694–703. [Google Scholar] [CrossRef]
- Baroi, S.; Sarker, P.C.; Baroi, S. An Improved MPPT Technique – Alternative to Fractional Open Circuit Voltage Method. In Proceedings of the 2017 2nd International Conference on Electrical & Electronic Engineering (ICEEE), Rajshahi, Bangladesh, 27–29 December 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Chen, X.; Lei, H.; Xiong, R.; Shen, W.; Yang, R. A novel approach to reconstruct open circuit voltage for state of charge estimation of lithium ion batteries in electric vehicles. Appl. Energy 2019, 255, 113758. [Google Scholar] [CrossRef]
- Yang, J.; Huang, W.; Xia, B.; Mi, C. The improved open-circuit voltage characterization test using active polarization voltage reduction method. Appl. Energy 2019, 237, 682–694. [Google Scholar]
- Das, P. Maximum power tracking based open circuit voltage method for PV system. Energy Procedia 2016, 90, 2–13. [Google Scholar]
- Lim, K.; Bastawrous, H.A.; Duong, V.H.; See, K.W.; Zhang, P.; Dou, S.X. Fading Kalman filter-based real-time state of charge estimation in LiFePO4 battery-powered electric vehicles. Appl. Energy 2016, 169, 40–48. [Google Scholar]
- Topan, P.A.; Ramadan, M.N.; Fathoni, G.; Cahyadi, A.I.; Wahyunggoro, O. State of Charge (SOC) and State of Health (SOH) estimation on lithium polymer battery via Kalman filter. In Proceedings of the 2016 2nd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 27–28 October 2016; pp. 93–96. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B.; Mekhilef, S. Overview of model-based online state-of-charge estimation using Kalman filter family for lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 113, 109233. [Google Scholar]
- Zhang, S.; Xie, C.; Zeng, C.; Quan, S. SOC estimation optimization method based on parameter modified particle Kalman Filter algorithm. Clust. Comput. 2019, 22, 6009–6018. [Google Scholar]
- Schacht-Rodriguez, R.; Ortiz-Torres, G.; García-Beltrán, C.; Astorga-Zaragoza, C.; Ponsart, J.; Theilliol, D. SoC estimation using an Extended Kalman filter for UAV applications. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 179–187. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, Z.; Huang, L. SoC estimation of Lithium battery based on improved BP neural network. Energy Procedia 2017, 105, 4153–4158. [Google Scholar] [CrossRef]
- Dang, X.; Yan, L.; Xu, K.; Wu, X.; Jiang, H.; Sun, H. Open-circuit voltage-based state of charge estimation of lithium-ion battery using dual neural network fusion battery model. Electrochim. Acta 2016, 188, 356–366. [Google Scholar] [CrossRef]
- Yan, Q.; Wang, Y. Predicting for power battery SOC based on neural network. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 4140–4143. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery state of charge estimation using a load-classifying neural network. J. Energy Storage 2016, 7, 236–243. [Google Scholar]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Chang, W.Y. The state of charge estimating methods for battery: A review. Int. Sch. Res. Not. 2013, 2013, 953792. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, Z.; Tang, G.; Chen, Z.; Zhang, N. Estimation method of state-of-charge for lithium-ion battery used in hybrid electric vehicles based on variable structure extended kalman filter. Chin. J. Mech. Eng. 2016, 29, 717–726. [Google Scholar] [CrossRef]
- Mukherjee, N.; De, D. A New State-of-Charge Control Derivation Method for Hybrid Battery Type Integration. IEEE Trans. Energy Convers. 2017, 32, 866–875. [Google Scholar] [CrossRef]
- Chang, Y.; Fang, H.; Zhang, Y. A new hybrid method for the prediction of the remaining useful life of a lithium-ion battery. Appl. Energy 2017, 206, 1564–1578. [Google Scholar] [CrossRef]
- Chen, C.; Shang, F.; Salameh, M.; Krishnamurthy, M. Challenges and Advancements in Fast Charging Solutions for EVs: A Technological Review. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 695–701. [Google Scholar] [CrossRef]
- Lithium-ion battery manufacturing for electric vehicles: A contemporary overview. In Advances in Battery Manufacturing, Service, and Management Systems; Wiley: Hoboken, NJ, USA, 2017; pp. 1–28. [CrossRef]
- Ansean, D.; Gonzalez, M.; Blanco, C.; Viera, J.C.; Fernandez, Y.; Garcia, V.M. Lithium-ion battery degradation indicators via incremental capacity analysis. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, Q.; Tung, L.J.; Greenleaf, M.; Li, H. Integrated Size and Energy Management Design of Battery Storage to Enhance Grid Integration of Large-Scale PV Power Plants. IEEE Trans. Ind. Electron. 2018, 65, 394–402. [Google Scholar] [CrossRef]
- Ma, C.; Yao, R.; Li, C.; Qu, X. A Family of IPT Battery Chargers with Small Clamp Coil for Configurable and Self-Sustained Battery Charging Profile. IEEE Trans. Power Electron. 2023, 38, 7910–7919. [Google Scholar] [CrossRef]
- Tariq, M.; Maswood, A.I.; Gajanayake, C.J.; Gupta, A.K. Modeling and Integration of a Lithium-Ion Battery Energy Storage System with the More Electric Aircraft 270 V DC Power Distribution Architecture. IEEE Access 2018, 6, 41785–41802. [Google Scholar] [CrossRef]
- Soares dos Santos, G.; José Grandinetti, F.; Augusto Rocha Alves, R.; de Queiróz Lamas, W. Design and Simulation of an Energy Storage System with Batteries Lead Acid and Lithium-Ion for an Electric Vehicle: Battery vs. Conduction Cycle Efficiency Analysis. IEEE Lat. Am. Trans. 2020, 18, 1345–1352. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, G.; Zhou, M.; Li, G. A Comprehensive Review of Research Hotspots on Battery Management Systems for UAVs. IEEE Access 2023, 11, 84636–84650. [Google Scholar] [CrossRef]
- Karneddi, H.; Ronanki, D. Reconfigurable Battery Charger with a Wide Voltage Range for Universal Electric Vehicle Charging Applications. IEEE Trans. Power Electron. 2023, 38, 10606–10610. [Google Scholar] [CrossRef]
- Amini, M.; Nazari, M.H.; Hosseinian, S.H. Optimal Scheduling and Cost-Benefit Analysis of Lithium-Ion Batteries Based on Battery State of Health. IEEE Access 2023, 11, 1359–1371. [Google Scholar] [CrossRef]
- Jafari, M.; Gauchia, A.; Zhao, S.; Zhang, K.; Gauchia, L. Electric Vehicle Battery Cycle Aging Evaluation in Real-World Daily Driving and Vehicle-to-Grid Services. IEEE Trans. Transp. Electrif. 2018, 4, 122–134. [Google Scholar] [CrossRef]
- Alramlawi, M.; Li, P. Design Optimization of a Residential PV-Battery Microgrid with a Detailed Battery Lifetime Estimation Model. IEEE Trans. Ind. Appl. 2020, 56, 2020–2030. [Google Scholar] [CrossRef]
- Bai, Y.; Li, J.; He, H.; Santos, R.C.D.; Yang, Q. Optimal Design of a Hybrid Energy Storage System in a Plug-In Hybrid Electric Vehicle for Battery Lifetime Improvement. IEEE Access 2020, 8, 142148–142158. [Google Scholar] [CrossRef]
- Masrur, M.A.; Skowronska, A.G.; Hancock, J.; Kolhoff, S.W.; McGrew, D.Z.; Vandiver, J.C.; Gatherer, J. Military-Based Vehicle-to-Grid and Vehicle-to-Vehicle Microgrid—System Architecture and Implementation. IEEE Trans. Transp. Electrif. 2018, 4, 157–171. [Google Scholar] [CrossRef]
- Li, S.; Zhao, P.; Gu, C.; Li, J.; Huo, D.; Cheng, S. Aging Mitigation for Battery Energy Storage System in Electric Vehicles. IEEE Trans. Smart Grid 2023, 14, 2152–2163. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Z.; Zhang, L.; Liu, P.; Zhang, Z. A Novel Consistency Evaluation Method for Series-Connected Battery Systems Based on Real-World Operation Data. IEEE Trans. Transp. Electrif. 2021, 7, 437–451. [Google Scholar] [CrossRef]
- Kumar, R.R.; Bharatiraja, C.; Udhayakumar, K.; Devakirubakaran, S.; Sekar, K.S.; Mihet-Popa, L. Advances in Batteries, Battery Modeling, Battery Management System, Battery Thermal Management, SOC, SOH, and Charge/Discharge Characteristics in EV Applications. IEEE Access 2023, 11, 105761–105809. [Google Scholar] [CrossRef]
- Singh, S.; More, V.; Batheri, R. Driving Electric Vehicles into the Future with Battery Management Systems. IEEE Eng. Manag. Rev. 2022, 50, 157–161. [Google Scholar] [CrossRef]
- Zhang, E.; Xu, C.; Wang, S.; Shi, Q.; Zhang, Y.; Li, H.; Wang, K.; Jiang, K. Effects of cell-to-cell variations on series-connected liquid metal battery pack capacity. J. Energy Storage 2023, 73, 109148. [Google Scholar] [CrossRef]
- Shen, K.; Sun, J.; Zheng, Y.; Xu, C.; Wang, H.; Wang, S.; Chen, S.; Feng, X. A comprehensive analysis and experimental investigation for the thermal management of cell-to-pack battery system. Appl. Therm. Eng. 2022, 211, 118422. [Google Scholar]
- BS, S.; Hampannavar, S.; Bairwa, B. Applications of battery management system (bms) in sustainable transportation: A comprehensive approach from battery modeling to battery integration to the power grid. World Electr. Veh. J. 2022, 13, 80. [Google Scholar]
- Famà, F.R.; Loreti, G.; Calabrò, G.; Ubertini, S.; Volpe, F.A.; Facci, A.L. An optimized power conversion system for a stellarator-based nuclear fusion power plant. Energy Convers. Manag. 2023, 276, 116572. [Google Scholar]
- Haque, M.M.; Wolfs, P.J.; Alahakoon, S.; Islam, M.A.; Nadarajah, M.; Zare, F.; Farrok, O. Three-Port Converters for Energy Conversion of PV-BES Integrated Systems—A Review. IEEE Access 2023, 11, 6551–6573. [Google Scholar] [CrossRef]
- Bhattacharjee, S.; Nandi, C. Advanced Energy Management System (A-EMS) Design of a Grid-Integrated Hybrid System. Iran. J. Sci. Technol. Trans. Electr. Eng. 2023, 47, 1021–1044. [Google Scholar] [CrossRef]
- Ahmadifar, A.; Ginocchi, M.; Golla, M.S.; Ponci, F.; Monti, A. Development of an Energy Management System for a Renewable Energy Community and Performance Analysis via Global Sensitivity Analysis. IEEE Access 2023, 11, 4131–4154. [Google Scholar] [CrossRef]
- Zeng, H.; Dai, J.; Zuo, C.; Chen, H.; Li, M.; Zhang, F. Correlation investigation of wind turbine multiple operating parameters based on SCADA data. Energies 2022, 15, 5280. [Google Scholar] [CrossRef]
- Cervero, D.; Fotopoulou, M.; Muñoz-Cruzado, J.; Rakopoulos, D.; Stergiopoulos, F.; Nikolopoulos, N.; Voutetakis, S.; Sanz, J.F. Solid State Transformers: A Critical Review of Projects with Relevant Prototypes and Demonstrators. Electronics 2023, 12, 931. [Google Scholar]
- Mollik, M.S.; Hannan, M.A.; Reza, M.S.; Abd Rahman, M.S.; Lipu, M.S.H.; Ker, P.J.; Mansor, M.; Muttaqi, K.M. The Advancement of Solid-State Transformer Technology and Its Operation and Control with Power Grids: A Review. Electronics 2022, 11, 2648. [Google Scholar] [CrossRef]
- Viswanathan, V.; Palaniswamy, L.N.; Leelavinodhan, P.B. Optimization techniques of battery packs using re-configurability: A review. J. Energy Storage 2019, 23, 404–415. [Google Scholar] [CrossRef]
- Abronzini, U.; Di Monaco, M.; Porpora, F.; Tomasso, G.; D’Arpino, M.; Attaianese, C. Thermal Management Optimization of a Passive BMS for Automotive Applications. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Cârstoiu, G.; Micea, M.V.; Ungurean, L.; Marcu, M. Novel battery wear leveling method for large-scale reconfigurable battery packs. Int. J. Energy Res. 2021, 45, 1932–1947. [Google Scholar] [CrossRef]
- Miniguano, H.; Barrado, A.; Lázaro, A.; Zumel, P.; Fernández, C. General Parameter Identification Procedure and Comparative Study of Li-Ion Battery Models. IEEE Trans. Veh. Technol. 2020, 69, 235–245. [Google Scholar] [CrossRef]
- Al-Refai, A.; Alkhateeb, A.; Dalala, Z.M. Enhancing the LCO 18,650 Battery Charging/Discharging Using Temperature and Electrical Based Model. Batteries 2022, 8, 199. [Google Scholar]
- Wu, X.; Li, S.; Gan, S.; Hou, C. An adaptive energy optimization method of hybrid battery-supercapacitor storage system for uncertain demand. Energies 2022, 15, 1765. [Google Scholar] [CrossRef]
- Gao, Y.; Lei, H. Semi-Empirical Ageing Model Development of Traction Battery; Chalmers University of Technology: Gothenburg, Sweden, 2023. [Google Scholar]
- Xu, W.; Cao, H.; Lin, X.; Shu, F.; Du, J.; Wang, J.; Tang, J. Data-Driven Semi-Empirical Model Approximation Method for Capacity Degradation of Retired Lithium-Ion Battery Considering SOC Range. Appl. Sci. 2023, 13, 11943. [Google Scholar] [CrossRef]
- Qingwei, Z.; Xiaoli, Y.; Qichao, W.; Yidan, X.; Fenfang, C. Semi-empirical degradation model of lithium-ion battery with high energy density. Energy Storage Sci. Technol. 2022, 11, 2324. [Google Scholar]
- Singh, P.; Chen, C.; Tan, C.M.; Huang, S.C. Semi-Empirical capacity fading model for SoH estimation of Li-Ion batteries. Appl. Sci. 2019, 9, 3012. [Google Scholar]
- Chen, D.; Meng, J.; Huang, H.; Wu, J.; Liu, P.; Lu, J.; Liu, T. An Empirical-Data Hybrid Driven Approach for Remaining Useful Life prediction of lithium-ion batteries considering capacity diving. Energy 2022, 245, 123222. [Google Scholar]
- Cui, F.; Li, Z.; Liu, C.; Shi, Y. A Data-Driven Hybrid Approach for Capacity Estimation on Lithium-ion Battery. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 5895–5898. [Google Scholar] [CrossRef]
- Ganesh, S.V.; D’Arpino, M. Critical Comparison of Li-Ion Aging Models for Second Life Battery Applications. Energies 2023, 16, 3023. [Google Scholar] [CrossRef]
- Naumann, M.; Schimpe, M.; Keil, P.; Hesse, H.C.; Jossen, A. Analysis and modeling of calendar aging of a commercial LiFePO4/graphite cell. J. Energy Storage 2018, 17, 153–169. [Google Scholar] [CrossRef]
- Hahn, S.L.; Storch, M.; Swaminathan, R.; Obry, B.; Bandlow, J.; Birke, K.P. Quantitative validation of calendar aging models for lithium-ion batteries. J. Power Sources 2018, 400, 402–414. [Google Scholar] [CrossRef]
- Hemi, H.; M’Sirdi, N.K.; Naamane, A. A new proposed shepherd model of a li-ion open circuit battery based on data fitting. In Proceedings of the IMAACA 2019, Lisbonne, Portugal, 18–20 September 2019. [Google Scholar]
- Campagna, N.; Castiglia, V.; Miceli, R.; Mastromauro, R.A.; Spataro, C.; Trapanese, M.; Viola, F. Battery models for battery powered applications: A comparative study. Energies 2020, 13, 4085. [Google Scholar]
- Raszmann, E.; Baker, K.; Shi, Y.; Christensen, D. Modeling stationary lithium-ion batteries for optimization and predictive control. In Proceedings of the 2017 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 23–24 February 2017; pp. 1–7. [Google Scholar]
- Moussa, S.; Ben Ghorbal, M.J. Shepherd Battery Model Parametrization for Battery Emulation in EV Charging Application. In Proceedings of the 2022 IEEE International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Tunis, Tunisia, 26–28 October 2022; Volume 4, pp. 1–6. [Google Scholar] [CrossRef]
- Liu, L.; Zhu, J.; Zheng, L. An Effective Method for Estimating State of Charge of Lithium-Ion Batteries Based on an Electrochemical Model and Nernst Equation. IEEE Access 2020, 8, 211738–211749. [Google Scholar] [CrossRef]
- Liu, X.T.; Qin, S.X.; He, Y.; Zheng, X.X.; Cao, C.R. SOC estimation of the lithium-ion battery with the temperature-based Nernst model. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1419–1422. [Google Scholar] [CrossRef]
- Liu, D.; Wang, X.; Zhang, M.; Gong, M. SOC Estimation of Lithium Battery Based on N-2RC Model in Electric Vehicle. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 2916–2921. [Google Scholar] [CrossRef]
- Chang, F.; Zheng, Z. An SOC estimation method based on sliding mode observer and the Nernst Equation. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 6187–6190. [Google Scholar] [CrossRef]
- Haeverbeke, M.V.; Stock, M.; De Baets, B. Equivalent Electrical Circuits and Their Use Across Electrochemical Impedance Spectroscopy Application Domains. IEEE Access 2022, 10, 51363–51379. [Google Scholar] [CrossRef]
- Ates, M.; Chebil, A. Supercapacitor and battery performances of multi-component nanocomposites: Real circuit and equivalent circuit model analysis. J. Energy Storage 2022, 53, 105093. [Google Scholar]
- Guo, R.; Shen, W. A review of equivalent circuit model based online state of power estimation for lithium-ion batteries in electric vehicles. Vehicles 2021, 4, 1–29. [Google Scholar]
- Dierickx, S.; Weber, A.; Ivers-Tiffée, E. How the distribution of relaxation times enhances complex equivalent circuit models for fuel cells. Electrochim. Acta 2020, 355, 136764. [Google Scholar] [CrossRef]
- Chaibi, Y.; Allouhi, A.; Malvoni, M.; Salhi, M.; Saadani, R. Solar irradiance and temperature influence on the photovoltaic cell equivalent-circuit models. Sol. Energy 2019, 188, 1102–1110. [Google Scholar] [CrossRef]
- Khayamy, M.; Nasiri, A.; Okoye, O. Development of an Equivalent Circuit for Batteries Based on a Distributed Impedance Network. IEEE Trans. Veh. Technol. 2020, 69, 6119–6128. [Google Scholar] [CrossRef]
- Seaman, A.; Dao, T.S.; McPhee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Sources 2014, 256, 410–423. [Google Scholar] [CrossRef]
- Liu, X.; Li, W.; Zhou, A. PNGV equivalent circuit model and SOC estimation algorithm for lithium battery pack adopted in AGV vehicle. IEEE Access 2018, 6, 23639–23647. [Google Scholar]
- Geng, Y.; Pang, H.; Liu, X. State-of-charge estimation for lithium-ion battery based on PNGV model and particle filter algorithm. J. Power Electron. 2022, 22, 1154–1164. [Google Scholar]
- Xia, B.; Ye, B.; Cao, J. Polarization Voltage Characterization of Lithium-Ion Batteries Based on a Lumped Diffusion Model and Joint Parameter Estimation Algorithm. Energies 2022, 15, 1150. [Google Scholar] [CrossRef]
- Xie, S.; Zhang, X.; Bai, W.; Guo, A.; Li, W.; Wang, R. State-of-Charge Estimation of Lithium-Ion Battery Based on an Improved Dual-Polarization Model. Energy Technol. 2023, 11, 2201364. [Google Scholar] [CrossRef]
- Barcellona, S.; Colnago, S.; Codecasa, L.; Piegari, L. Unified model of lithium-ion battery and electrochemical storage system. J. Energy Storage 2023, 73, 109202. [Google Scholar] [CrossRef]
- Cruz-Manzo, S.; Martínez-Zárate, I. Analytical transfer function for the simulation of the frequency-domain and time-domain responses of the blocked-diffusion Warburg impedance. J. Energy Storage 2023, 72, 108676. [Google Scholar] [CrossRef]
- Choudhury, B.; Jangale, A.; Suthar, B. Warburg Conductivity for Binary Electrolyte for Enabling Electrolyte Screening and Efficient Battery Operations. J. Electrochem. Soc. 2023, 170, 070519. [Google Scholar] [CrossRef]
- Xianrong, J.; Duan, X.; Jiang, W.; Wang, Y.; Zou, Y.; Lei, W.; Sun, L.; Ma, Z. Structural design of a composite board/heat pipe based on the coupled electro-chemical-thermal model in battery thermal management system. Energy 2021, 216, 119234. [Google Scholar]
- Duan, X.; Jiang, W.; Zou, Y.; Lei, W.; Ma, Z. A coupled electrochemical–thermal–mechanical model for spiral-wound Li-ion batteries. J. Mater. Sci. 2018, 53, 10987–11001. [Google Scholar] [CrossRef]
- Jin, X.; Duan, X. Investigate Thermodynamic and Kinetic Degradation of Lithium-Ion Batteries through a Combined Experimental and Modeling Approach. ECS Meet. Abstr. 2021, 239, 268. [Google Scholar] [CrossRef]
- Jin, X.; Duan, X. (Invited) Parameter Identification and Degradation Estimation of Li-Ion Batteries: Physics-Based Model and EIS Experimental Coupling. ECS Meeting Abstr. 2023, 243, 1648. [Google Scholar]
- Nascimento, R.G.; Viana, F.A.; Corbetta, M.; Kulkarni, C.S. A framework for Li-ion battery prognosis based on hybrid Bayesian physics-informed neural networks. Sci. Rep. 2023, 13, 13856. [Google Scholar] [CrossRef]
- Pugalenthi, K.; Park, H.; Hussain, S.; Raghavan, N. Remaining useful life prediction of lithium-ion batteries using neural networks with adaptive bayesian learning. Sensors 2022, 22, 3803. [Google Scholar]
- Zhang, S.; Liu, Z.; Su, H. A Bayesian Mixture Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Transp. Electrif. 2022, 8, 4708–4721. [Google Scholar] [CrossRef]
- Yang, B.; Wang, Y.; Zhan, Y. Lithium battery state-of-charge estimation based on a Bayesian optimization bidirectional long short-term memory neural network. Energies 2022, 15, 4670. [Google Scholar] [CrossRef]
- Lin, Y.H.; Li, G.H. A Bayesian Deep Learning Framework for RUL Prediction Incorporating Uncertainty Quantification and Calibration. IEEE Trans. Ind. Inform. 2022, 18, 7274–7284. [Google Scholar] [CrossRef]
- Pei, H.; Si, X.S.; Hu, C.; Li, T.; He, C.; Pang, Z. Bayesian Deep-Learning-Based Prognostic Model for Equipment without Label Data Related to Lifetime. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 504–517. [Google Scholar] [CrossRef]
- Kim, M.; Han, S. Novel Data-Efficient Mechanism-Agnostic Capacity Fade Model for Li-Ion Batteries. IEEE Trans. Ind. Electron. 2021, 68, 6267–6275. [Google Scholar] [CrossRef]
- Pugalenthi, K.; Park, H.; Hussain, S.; Raghavan, N. Hybrid Particle Filter Trained Neural Network for Prognosis of Lithium-Ion Batteries. IEEE Access 2021, 9, 135132–135143. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.; Li, C.; Wu, L.; Wang, Y. A Data-Driven Method with Mode Decomposition Mechanism for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Power Electron. 2022, 37, 13684–13695. [Google Scholar] [CrossRef]
- Shateri, N.; Shi, Z.; Auger, D.J.; Fotouhi, A. Lithium-Sulfur Cell State of Charge Estimation Using a Classification Technique. IEEE Trans. Veh. Technol. 2021, 70, 212–224. [Google Scholar] [CrossRef]
- Cao, M.; Zhang, T.; Yu, B.; Liu, Y. A Method for Interval Prediction of Satellite Battery State of Health Based on Sample Entropy. IEEE Access 2019, 7, 141549–141561. [Google Scholar] [CrossRef]
- Zhu, J.; Tan, T.; Wu, L.; Yuan, H. RUL Prediction of Lithium-Ion Battery Based on Improved DGWO-ELM Method in a Random Discharge Rates Environment. IEEE Access 2019, 7, 125176–125187. [Google Scholar] [CrossRef]
- Crocioni, G.; Pau, D.; Delorme, J.M.; Gruosso, G. Li-Ion Batteries Parameter Estimation with Tiny Neural Networks Embedded on Intelligent IoT Microcontrollers. IEEE Access 2020, 8, 122135–122146. [Google Scholar] [CrossRef]
- Xiong, W.; Mo, Y.; Yan, C. Online State-of-Health Estimation for Second-Use Lithium-Ion Batteries Based on Weighted Least Squares Support Vector Machine. IEEE Access 2021, 9, 1870–1881. [Google Scholar] [CrossRef]
- Li, R.; Xu, S.; Li, S.; Zhou, Y.; Zhou, K.; Liu, X.; Yao, J. State of Charge Prediction Algorithm of Lithium-Ion Battery Based on PSO-SVR Cross Validation. IEEE Access 2020, 8, 10234–10242. [Google Scholar] [CrossRef]
- Vidal, C.; Malysz, P.; Kollmeyer, P.; Emadi, A. Machine Learning Applied to Electrified Vehicle Battery State of Charge and State of Health Estimation: State-of-the-Art. IEEE Access 2020, 8, 52796–52814. [Google Scholar] [CrossRef]
- Zhang, L.; Li, K.; Du, D.; Guo, Y.; Fei, M.; Yang, Z. A Sparse Learning Machine for Real-Time SOC Estimation of Li-ion Batteries. IEEE Access 2020, 8, 156165–156176. [Google Scholar] [CrossRef]
- Xue, K.; Yang, J.; Yang, M.; Wang, D. An Improved Generic Hybrid Prognostic Method for RUL Prediction Based on PF-LSTM Learning. IEEE Trans. Instrum. Meas. 2023, 72, 1–21. [Google Scholar] [CrossRef]
- Lai, C.M.; Kuo, T.J. Available Capacity Computation Model Based on Long Short-Term Memory Recurrent Neural Network for Gelled-Electrolyte Batteries in Golf Carts. IEEE Access 2022, 10, 54433–54444. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, G.; Xu, J.; Liu, Z.; Yan, X.; McCann, J.A. A Simplified Historical-Information-Based SOC Prediction Method for Supercapacitors. IEEE Trans. Ind. Electron. 2022, 69, 13090–13098. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Zhou, D.; Chen, M. State-of-Charge Estimation for Lead-Acid Battery Using Isolation Forest Algorithm and Long Short Term Memory Network with Attention Mechanism. IEEE Access 2023, 11, 49193–49204. [Google Scholar] [CrossRef]
- How, D.N.T.; Hannan, M.A.; Lipu, M.S.H.; Ker, P.J.; Mansor, M.; Sahari, K.S.M.; Muttaqi, K.M. SOC Estimation Using Deep Bidirectional Gated Recurrent Units with Tree Parzen Estimator Hyperparameter Optimization. IEEE Trans. Ind. Appl. 2022, 58, 6629–6638. [Google Scholar] [CrossRef]
- Wang, X.; Hao, Z.; Chen, Z.; Zhang, J. Joint Prediction of Li-ion Battery State of Charge and State of Health Based on the DRSN-CW-LSTM Model. IEEE Access 2023, 11, 70263–70273. [Google Scholar] [CrossRef]
- Qin, Y.; Adams, S.; Yuen, C. Transfer Learning-Based State of Charge Estimation for Lithium-Ion Battery at Varying Ambient Temperatures. IEEE Trans. Ind. Inform. 2021, 17, 7304–7315. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.; Cao, Y.; Jiang, L.; Wan, J.; Rehtanz, C. An RNN with Small Sequence Trained by Multi-Level Optimization for SOC Estimation in Li-Ion Battery Applications. IEEE Trans. Veh. Technol. 2023, 72, 11469–11481. [Google Scholar] [CrossRef]
- Caliwag, A.C.; Lim, W. Hybrid VARMA and LSTM Method for Lithium-ion Battery State-of-Charge and Output Voltage Forecasting in Electric Motorcycle Applications. IEEE Access 2019, 7, 59680–59689. [Google Scholar] [CrossRef]
- Wei, M.; Ye, M.; Li, J.B.; Wang, Q.; Xu, X. State of Charge Estimation of Lithium-Ion Batteries Using LSTM and NARX Neural Networks. IEEE Access 2020, 8, 189236–189245. [Google Scholar] [CrossRef]
- Song, X.; Yang, F.; Wang, D.; Tsui, K.L. Combined CNN-LSTM Network for State-of-Charge Estimation of Lithium-Ion Batteries. IEEE Access 2019, 7, 88894–88902. [Google Scholar] [CrossRef]
- Ray, S. An analysis of computational complexity and accuracy of two supervised machine learning algorithms—K-nearest neighbor and support vector machine. In Proceedings of the Data Management, Analytics and Innovation: Proceedings of ICDMAI 2020, New Delhi, India, 17–19 January 2020; Springer: Berlin/Heidelberg, Germany, 2021; Volume 1, pp. 335–347. [Google Scholar]
- Chauhan, V.K.; Dahiya, K.; Sharma, A. Problem formulations and solvers in linear SVM: A review. Artif. Intell. Rev. 2019, 52, 803–855. [Google Scholar] [CrossRef]
- Li, J.; Ye, M.; Meng, W.; Xu, X.; Jiao, S. A Novel State of Charge Approach of Lithium Ion Battery Using Least Squares Support Vector Machine. IEEE Access 2020, 8, 195398–195410. [Google Scholar] [CrossRef]
- Bajaj, N.; Chiu, G.T.C.; Allebach, J.P. Reduction of memory footprint and computation time for embedded Support Vector Machine (SVM) by kernel expansion and consolidation. In Proceedings of the 2014 IEEE International Workshop on Machine Learning for Signal Processing (MLSP), Reims, France, 21–24 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Shi, D.; Zhao, J.; Wang, Z.; Zhao, H.; Eze, C.; Wang, J.; Lian, Y.; Burke, A.F. Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health. Energies 2023, 16, 3855. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Wu, J.; Cheng, W.; Zhu, Q. SOC estimation for lithium-ion battery using the LSTM-RNN with extended input and constrained output. Energy 2023, 262, 125375. [Google Scholar] [CrossRef]
- Shen, L.; Li, J.; Meng, L.; Zhu, L.; Shen, H.T. Transfer Learning-based State of Charge and State of Health Estimation for Li-ion Batteries: A Review. IEEE Trans. Transp. Electrif. 2023, 1. [Google Scholar] [CrossRef]
- Gao, Y.; Ji, W.; Zhao, X. SOC Estimation of E-Cell Combining BP Neural Network and EKF Algorithm. Processes 2022, 10, 1721. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, J.; Wang, Z.; Jiang, Y. Joint SOH-SOC estimation model for lithium-ion batteries based on GWO-BP neural network. Energies 2022, 16, 132. [Google Scholar] [CrossRef]
- Eleftheriadis, P.; Leva, S.; Ogliari, E. Bayesian hyperparameter optimization of stacked bidirectional long short-term memory neural network for the state of charge estimation. Sustain. Energy Grids Netw. 2023, 36, 101160. [Google Scholar] [CrossRef]
- Eleftheriadis, P.; Hegde, M.; Sohal, H.S.; Leva, S. Hyperband Optimization of Stacked Bidirectional Long Short-Term Memory Neural Network for the State of Charge Estimation. In Proceedings of the 2023 IEEE International Conference on Environment and Electrical Engineering and 2023 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 6–9 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Mohammadi, F. Lithium-ion battery State-of-Charge estimation based on an improved Coulomb-Counting algorithm and uncertainty evaluation. J. Energy Storage 2022, 48, 104061. [Google Scholar] [CrossRef]
- Huang, H.; Meng, J.; Wang, Y.; Feng, F.; Cai, L.; Peng, J.; Liu, T. A comprehensively optimized lithium-ion battery state-of-health estimator based on Local Coulomb Counting Curve. Appl. Energy 2022, 322, 119469. [Google Scholar] [CrossRef]
- Lee, J.; Won, J. Enhanced Coulomb Counting Method for SoC and SoH Estimation Based on Coulombic Efficiency. IEEE Access 2023, 11, 15449–15459. [Google Scholar] [CrossRef]
- Xiong, R.; Duan, Y.; Zhang, K.; Lin, D.; Tian, J.; Chen, C. State-of-charge estimation for onboard LiFePO4 batteries with adaptive state update in specific open-circuit-voltage ranges. Appl. Energy 2023, 349, 121581. [Google Scholar] [CrossRef]
- Sesidhar, D.; Badachi, C.; Green, R.C., II. A review on data-driven SOC estimation with Li-Ion batteries: Implementation methods & future aspirations. J. Energy Storage 2023, 72, 108420. [Google Scholar]
- Rey, S.O.; Romero, J.A.; Romero, L.T.; Martínez, À.F.; Roger, X.S.; Qamar, M.A.; Domínguez-García, J.L.; Gevorkov, L. Powering the future: A comprehensive review of battery energy storage systems. Energies 2023, 16, 6344. [Google Scholar]
- Zhou, Z.; Zhang, C. An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach. Batteries 2023, 9, 583. [Google Scholar] [CrossRef]
- Liu, X.; Li, Q.; Wang, L.; Lin, M.; Wu, J. Data-Driven State of Charge Estimation for Power Battery with Improved Extended Kalman Filter. IEEE Trans. Instrum. Meas. 2023, 72, 1500910. [Google Scholar] [CrossRef]
- Lin, Q.; Li, X.; Tu, B.; Cao, J.; Zhang, M.; Xiang, J. Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries. Sensors 2023, 23, 467. [Google Scholar] [CrossRef]
- Shi, D.; Zhao, J.; Eze, C.; Wang, Z.; Wang, J.; Lian, Y.; Burke, A.F. Cloud-Based Artificial Intelligence Framework for Battery Management System. Energies 2023, 16, 4403. [Google Scholar] [CrossRef]
- Marques, T.M.B.; dos Santos, J.L.F.; Castanho, D.S.; Ferreira, M.B.; Stevan, S.L., Jr.; Illa Font, C.H.; Antonini Alves, T.; Piekarski, C.M.; Siqueira, H.V.; Corrêa, F.C. An Overview of Methods and Technologies for Estimating Battery State of Charge in Electric Vehicles. Energies 2023, 16, 5050. [Google Scholar]
- Tian, J.; Chen, C.; Shen, W.; Sun, F.; Xiong, R. Deep learning framework for lithium-ion battery state of charge estimation: Recent advances and future perspectives. Energy Storage Mater. 2023, 61, 102883. [Google Scholar]
- Yang, F.; Shi, D.; Mao, Q.; Lam, K.H. Scientometric research and critical analysis of battery state-of-charge estimation. J. Energy Storage 2023, 58, 106283. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Battery | Advantages | Disadvantages |
|---|---|---|
| Lead–Acid | Low expense and simple to manufacture; Low cost per watt-hour; Low self-discharge; High specific power, capable of high discharge; Good performance at low and high operating temperatures. | Low specific energy; Slow charge: typical full charge requires 14–16 h; Must be stored in charged condition to prevent degradation; Limited cycle life: repeated deep-cycling reduces battery life; Transportation restrictions on the flooded type; Not environmentally friendly. |
| Nickel–Cadmium | Only battery that can be ultra-fast charged with little stress; Good load performance; Can be stored in discharged state; Simple storage and transportation: not subject to regulatory control; Good low-temperature performance. | Relatively low specific energy compared to new systems; Memory effect: needs periodic full discharge (rejuvenated); Cadmium is toxic metal: cannot be disposed of; High self-discharge, needs recharging after storage; Low cell voltage (typically) of requires many cells in series to achieve high voltage. |
| Lithium-Ion | High specific energy and high load capabilities with power cells; Long cycle life and extended shelf life; Maintenance-free; High capacity, low internal resistance and good coulombic efficiency; Simple charge algorithms; Relatively short charge times. | Requires protection circuit to prevent thermal runaway if stressed; Degrades at high temperature and when stored at high voltage; No rapid charge possible at freezing temperatures (<0 °C or <32 °F); Transportation regulations applicable when shipping in larger quantities. |
| Support Vector Machine (SVM) [172,173,174,175] | Long Short-Term Memory (LSTM) [176,177,178] | Bayesian Neural Network (BNN) [179,180,181,182] | |
|---|---|---|---|
| Formulation | SVM optimizes the margin through constraints and loss function. | LSTM has a recurrent structure with decision gates, cell state, and hidden state. | BNN uses probabilistic neurons with a Bayesian approach. |
| Complexity | Complexity depends on the dataset size and the type of kernel used. | Complexity depends on the length of the temporal sequence and the size of hidden layers. | Complexity depends on the network depth and layer size, also requires Bayesian inferences. |
| Memory | Memory usage depends on the number of support vectors. | Memory depends on the size of hidden layers and the number of parameters. | BNN has more efficient memory usage due to probabilistic weight utilization. |
| Embedded-oriented | Implementation is possible with linear models and simple kernels. | Higher computational complexity, requires case-by-case evaluations. | Implementation is possible but may require significant computational resources due to the Bayesian approach. |
| Real-time | Implementation is possible with linear models and simple kernels. | Implementation is possible but requires significant computational resources. | Implementation is possible but may have longer computation times due to Bayesian inference. |
| Time-series | Less suitable compared to LSTM. | Highly suitable, excellent for capturing long-term dependencies. | Suitable, but the ability to capture temporal dependencies may be limited. |
| Training | May require significant data for good performance and is sensitive to parameter configuration. | Effective with sequential data, but may require a significant amount of data. | May require less data compared to more complex models but requires data for Bayesian training. |
| Robustness | SVM provides good generalization and can handle noise with parameter tuning. | LSTM offers good generalization and can handle complex and noisy data. | BNN is robust to noise due to the Bayesian approach but may have potentially lower modeling capacity. |
| Method | Advantages | Disadvantages |
|---|---|---|
| Coulomb Counting Method [183,184,185] |
|
|
| Open-Circuit Voltage (OCV) Method [186,187,188] |
|
|
| Kalman Filter [189,190,191] |
|
|
| Artificial Intelligence Methods [192,193,194,195] |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dini, P.; Colicelli, A.; Saponara, S. Review on Modeling and SOC/SOH Estimation of Batteries for Automotive Applications. Batteries 2024, 10, 34. https://doi.org/10.3390/batteries10010034
Dini P, Colicelli A, Saponara S. Review on Modeling and SOC/SOH Estimation of Batteries for Automotive Applications. Batteries. 2024; 10(1):34. https://doi.org/10.3390/batteries10010034
Chicago/Turabian StyleDini, Pierpaolo, Antonio Colicelli, and Sergio Saponara. 2024. "Review on Modeling and SOC/SOH Estimation of Batteries for Automotive Applications" Batteries 10, no. 1: 34. https://doi.org/10.3390/batteries10010034
APA StyleDini, P., Colicelli, A., & Saponara, S. (2024). Review on Modeling and SOC/SOH Estimation of Batteries for Automotive Applications. Batteries, 10(1), 34. https://doi.org/10.3390/batteries10010034