
Evaluation of the Effectiveness of the UNet Model with Different Backbones in the Semantic Segmentation of Tomato Leaves and Fruits

 , and
, and
Abstract
1. Introduction
2. Related Works
3. Materials and Methods
3.1. Computer Characteristics
- Manufacturer: ASUSTeK COMPUTER INC., Taipei, China
- Model: X510UNR
- Processor: Intel® Core™ i7-8550U CPU @ 1.80 GHz × 8.
- RAM: 16 GB.
- Video card: NVIDIA® GeForce® 150MX.
3.2. Software Characteristics
- Operating system: Ubuntu 22.04.2 LTS 64 bits.
- Cuda tool kit: 10.1.243.
- Cudnn: 7.6.5.
- Tensorflow: 2.4.1.
- Keras: 2.4.3.
- Opencv: 3.4.2.
3.3. Dataset
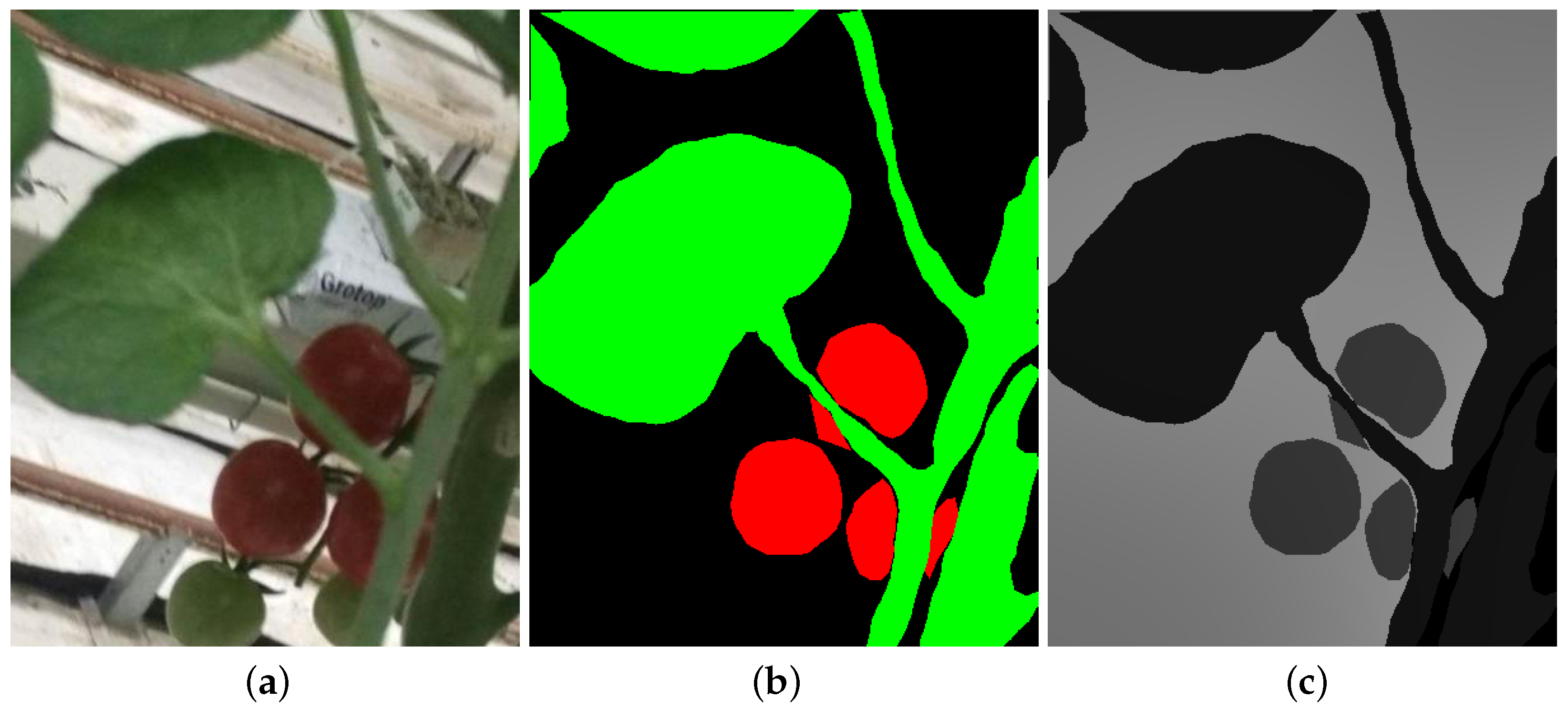
3.3.1. Labeling
3.3.2. Data Preprocessing
3.4. Metrics Performance
3.5. Network Architecture Model
3.5.1. UNet
3.5.2. Transfer Learning
3.6. Training Module
- encoder_freeze is set to True.
- Optimizer: Adam.
- Learning rate: 0.01
- Loss: Categorical_crossemtropy
- Batch size: 16
- Epoch: 75.
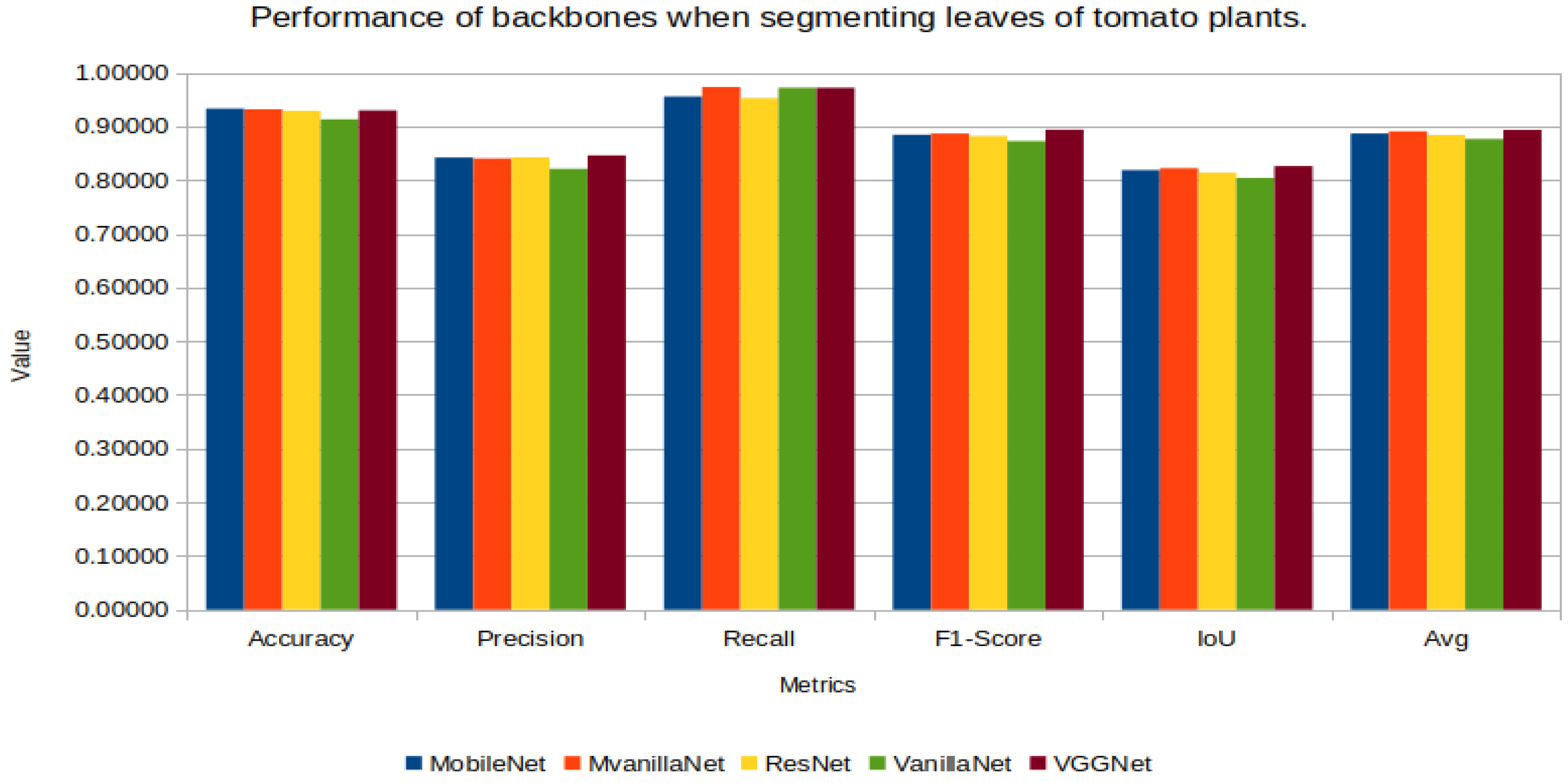
4. Results and Discussion
5. Comparative of Results with a Greedy-Type Optimization Algorithm
| Algorithm 1 Greedy Algorithm for the optimization of color dominance segmentation. |
| function GA() |
| while do |
| if then |
| end if |
| end while |
| return |
| end function |
6. Conclusions
Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Awasthi, Y. Press “A” for Artificial Intelligence in Agriculture: A Review. Int. J. Inform. Vis. 2020, 4, 112–116. [Google Scholar] [CrossRef]
- Ray, P.P. Internet of things for smart agriculture: Technologies, practices and future direction. J. Ambient. Intell. Smart Environ. 2017, 9, 395–420. [Google Scholar] [CrossRef]
- FAO. Our Approach|Food Systems|Food and Agriculture Organization of the United Nations. 2023. Available online: http://www.fao.org/food-systems/our-approach/en/ (accessed on 5 January 2025).
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Pierce, F.J.; Nowak, P. Aspects of precision agriculture. Adv. Agron. 1999, 67, 1–68. [Google Scholar]
- Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review. Comput. Electron. Agric. 2018, 153, 69–81. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Weng, Y.; Zhou, T.; Li, Y.; Qiu, X.; Cao, H.; Wang, Y.; Chen, J.; Jiang, D.; Zhang, X.; Tian, Q.; et al. NAS-Unet: Neural architecture search for medical image segmentation. IEEE Access 2019, 7, 21420–21428. [Google Scholar] [CrossRef]
- Huang, H.; Lin, L.; Tong, R.; Hu, H.; Zhang, Q.; Iwamoto, Y.; Han, X.; Chen, Y.W.; Wu, J. UNet 3+: A Full-Scale Connected UNet for Medical Image Segmentation. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing—Proceedings, Virtual, 4–9 May 2020; IEEE: New York, NY, USA, 2020; Volume 2020, pp. 1055–1059. [Google Scholar] [CrossRef]
- Esteva, A.; Chou, K.; Yeung, S.; Naik, N.; Madani, A.; Mottaghi, A.; Liu, Y.; Topol, E.; Dean, J.; Socher, R. Deep learning-enabled medical computer vision. NPJ Digit. Med. 2021, 4, 1–9. [Google Scholar] [CrossRef]
- Lu, Z.; Jiang, X.; Kot, A. Deep Coupled ResNet for Low-Resolution Face Recognition. IEEE Signal Process. Lett. 2018, 25, 526–530. [Google Scholar] [CrossRef]
- Mandal, B.; Okeukwu, A.; Theis, Y. Masked Face Recognition using ResNet-50. arXiv 2021, arXiv:2104.08997. [Google Scholar]
- Guo, Y.; Liu, Y.; Georgiou, T.; Lew, M.S. A review of semantic segmentation using deep neural networks. Int. J. Multimed. Inf. Retr. 2018, 7, 87–93. [Google Scholar] [CrossRef]
- Fuentes, A.; Yoon, S.; Kim, S.; Park, D. A Robust Deep-Learning-Based Detector for Real-Time Tomato Plant Diseases and Pests Recognition. Sensors 2017, 17, 2022. [Google Scholar] [CrossRef]
- Sladojevic, S.; Arsenovic, M.; Anderla, A.; Culibrk, D.; Stefanovic, D. Deep Neural Networks Based Recognition of Plant Diseases by Leaf Image Classification. Comput. Intell. Neurosci. 2016, 2016, 3289801. [Google Scholar] [CrossRef] [PubMed]
- Mohanty, S.P.; Hughes, D.; Salathe, M. Using Deep Learning for Image-Based Plant Disease Detection. Front. Plant Sci. 2016, 7, 215232. [Google Scholar] [CrossRef] [PubMed]
- Singh, V.; Misra, A.K. Detection of plant leaf diseases using image segmentation and soft computing techniques. Inf. Process. Agric. 2017, 4, 41–49. [Google Scholar] [CrossRef]
- Hall, D.; McCool, C.; Dayoub, F.; Sünderhauf, N.; Upcroft, B. Evaluation of features for leaf classification in challenging conditions. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, WACV 2015, Waikoloa, HI, USA, 5–9 January 2015; pp. 797–804. [Google Scholar] [CrossRef]
- Ponce, H.; Cevallos, C.; Espinosa, R.; Gutierrez, S. Estimation of Low Nutrients in Tomato Crops Through the Analysis of Leaf Images Using Machine Learning. J. Artif. Intell. Technol. 2021, 1, 131–137. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. UNet: Convolutional Networks for Biomedical Image Segmentation; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9351, pp. 234–241. [Google Scholar] [CrossRef]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Chen, H.; Wang, Y.; Guo, J.; Tao, D. VanillaNet: The Power of Minimalism in Deep Learning. Adv. Neural Inf. Process. Syst. 2023, 36, 7050–7064. [Google Scholar]
- McNeely-White, D.; Beveridge, J.R.; Draper, B.A. Inception and ResNet features are (almost) equivalent. Cogn. Syst. Res. 2020, 59, 312–318. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015—Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D. A survey of transfer learning. J. Big Data 2016, 3, 9. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, F.; Ghafoor Shah, S.; Ye, Y.; Mao, H.; Shah, S.G.; Ye, Y.; Mao, H. Use of leaf color images to identify nitrogen and potassium deficient tomatoes. Pattern Recognit. Lett. 2011, 32, 1584–1590. [Google Scholar] [CrossRef]
- Castillo-Martínez, M.; Gallegos-Funes, F.J.; Carvajal-Gámez, B.E.; Urriolagoitia-Sosa, G.; Rosales-Silva, A.J. Color index based thresholding method for background and foreground segmentation of plant images. Comput. Electron. Agric. 2020, 178, 105783. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Fang, Y. Color-, depth-, and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17. [Google Scholar] [CrossRef]
- Fan, P.; Lang, G.; Yan, B.; Lei, X.; Guo, P.; Liu, Z.; Yang, F. A Method of Segmenting Apples Based on Gray-Centered RGB Color Space. Remote Sens. 2021, 13, 1211. [Google Scholar] [CrossRef]
- Wulandhari, L.A.; Gunawan, A.A.S.; Qurania, A.; Harsani, P.; Triastinurmiatiningsih; Tarawan, F.; Hermawan, R.F. Plant nutrient deficiency detection using deep convolutional neural network. ICIC Express Lett. 2019, 13, 971–977. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2323. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; Volume 2016, pp. 2818–2826. [Google Scholar] [CrossRef]
- Zheng, Y.Y.; Kong, J.L.; Jin, X.B.; Wang, X.Y.; Su, T.L.; Zuo, M. Cropdeep: The crop vision dataset for deep-learning-based classification and detection in precision agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef]
- Mukti, I.Z.; Biswas, D. Transfer Learning Based Plant Diseases Detection Using ResNet50. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology, EICT 2019, Khulna, Bangladesh, 20–22 December 2019; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Guan, S.; Khan, A.A.; Sikdar, S.; Chitnis, P.V. Fully Dense UNet for 2-D Sparse Photoacoustic Tomography Artifact Removal. IEEE J. Biomed. Health Inform. 2020, 24, 568–576. [Google Scholar] [CrossRef]
- Ni, X.; Li, C.; Jiang, H.; Takeda, F. Deep learning image segmentation and extraction of blueberry fruit traits associated with harvestability and yield. Hortic. Res. 2020, 7, 110. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q.; Fu, L.; Whiting, M.D. Determining grapevine cordon shape for automated green shoot thinning using semantic segmentation-based deep learning networks. Comput. Electron. Agric. 2020, 171, 105308. [Google Scholar] [CrossRef]
- Kang, H.; Chen, C. Fruit detection and segmentation for apple harvesting using visual sensor in orchards. Sensors 2019, 19, 4599. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Su, Y.; Gao, S.; Wu, F.; Ma, Q.; Xu, K.; Hu, T.; Liu, J.; Pang, S.; Guan, H.; et al. Separating the Structural Components of Maize for Field Phenotyping Using Terrestrial LiDAR Data and Deep Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2644–2658. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, D.; Jia, W.; Ji, W.; Ruan, C.; Sun, Y. Cucumber fruits detection in greenhouses based on instance segmentation. IEEE Access 2019, 7, 139635–139642. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, T.; Hu, K.; Zhang, Y.; Yu, X.; Li, Y. A Deep Learning Semantic Segmentation Method for Landslide Scene Based on Transformer Architecture. Sustainability 2022, 14, 16311. [Google Scholar] [CrossRef]
- Roy, K.; Chaudhuri, S.S.; Pramanik, S. Deep learning based real-time Industrial framework for rotten and fresh fruit detection using semantic segmentation. Microsyst. Technol. 2021, 27, 3365–3375. [Google Scholar] [CrossRef]
- Wang, H.; Ding, J.; He, S.; Feng, C.; Zhang, C.; Fan, G.; Wu, Y.; Zhang, Y. MFBP-UNet: A Network for Pear Leaf Disease Segmentation in Natural Agricultural Environments. Plants 2023, 12, 3209. [Google Scholar] [CrossRef]
- Guo, Z.; Geng, Y.; Wang, C.; Xue, Y.; Sun, D.; Lou, Z.; Chen, T.; Geng, T.; Quan, L. InstaCropNet: An efficient Unet-Based architecture for precise crop row detection in agricultural applications. Artif. Intell. Agric. 2024, 12, 85–96. [Google Scholar] [CrossRef]
- Arakeri, M.; Lakshmana, B. Computer Vision Based Fruit Grading System for Quality Evaluation of Tomato in Agriculture industry. Procedia Comput. Sci. 2016, 79, 426–433. [Google Scholar] [CrossRef]
- Dhakshina Kumar, S.; Esakkirajan, S.; Bama, S.; Keerthiveena, B. A microcontroller based machine vision approach for tomato grading and sorting using SVM classifier. Microprocess. Microsyst. 2020, 76, 103090. [Google Scholar] [CrossRef]
- Guerra Ibarra, J.P.; Cuevas, F.J. Segmentation of Leaves and Fruits of Tomato Plants by Color Dominance. AgriEngineering 2023, 5, 1846–1864. [Google Scholar] [CrossRef]
- Wan, P.; Toudeshki, A.; Tan, H.; Ehsani, R. A methodology for fresh tomato maturity detection using computer vision. Comput. Electron. Agric. 2018, 146, 43–50. [Google Scholar] [CrossRef]
- Tran, T.T.; Choi, J.W.; Le, T.T.H.; Kim, J.W. A comparative study of deep CNN in forecasting and classifying the macronutrient deficiencies on development of tomato plant. Appl. Sci. 2019, 9, 1601. [Google Scholar] [CrossRef]
- Chowdhury, M.E.H.; Rahman, T.; Khandakar, A.; Ayari, M.A.; Khan, A.U.; Khan, M.S.; Al-Emadi, N.; Reaz, M.B.I.; Islam, M.T.; Ali, S.H.M. Automatic and Reliable Leaf Disease Detection. AgriEngineering 2021, 3, 294–312. [Google Scholar] [CrossRef]
- Deng, Y.; Xi, H.; Zhou, G.; Chen, A.; Wang, Y.; Li, L.; Hu, Y. An Effective Image-Based Tomato Leaf Disease Segmentation Method Using MC-UNet. Plant Phenomics 2023, 5, 49. [Google Scholar] [CrossRef]
- Badiger, M.; Mathew, J.A. Tomato plant leaf disease segmentation and multiclass disease detection using hybrid optimization enabled deep learning. J. Biotechnol. 2023, 374, 101–113. [Google Scholar] [CrossRef]
- Davis, J.; Goadrich, M. The relationship between Precision-Recall and ROC curves. In Proceedings of the 23rd International Conference on Machine Learning, Pittsburgh, PA, USA, 25–29 June 2006; pp. 233–240. [Google Scholar]
- Yu, J.; Xu, J.; Chen, Y.; Li, W.; Wang, Q.; Yoo, B.; Han, J.J. Learning Generalized Intersection Over Union for Dense Pixelwise Prediction. In Proceedings of Machine Learning Research, Proceedings of the 38th International Conference on Machine Learning, Virtual, 18–24 July 2021; Meila, M., Zhang, T., Eds.; PMLR: New York, NY, USA, 2021; Volume 139, pp. 12198–12207. [Google Scholar]
- Guerra Ibarra, J.P.; Cuevas de la Rosa, F. Optimization of Color Dominance Factor by Greedy Algorithm for Leaves and Fruit Segmentation of Tomato Plants. In Pattern Recognition; Mezura-Montes, E., Acosta-Mesa, H.G., Carrasco-Ochoa, J.A., Martínez-Trinidad, J.F., Olvera-López, J.A., Eds.; Springer: Cham, Switzerland, 2024; pp. 200–209. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Data on Leaves Segmentation of Tomato Plants | ||||||
|---|---|---|---|---|---|---|
| Model | Accuracy | Precision | Recall | F1-Score | IoU | Avg. |
| MobileNet-UNet | 0.93295 | 0.84188 | 0.95550 | 0.88427 | 0.81845 | 0.88661 |
| MvanillaNet-UNet | 0.93178 | 0.84018 | 0.97321 | 0.88667 | 0.82206 | 0.89078 |
| ResNet-UNet | 0.92889 | 0.84233 | 0.95279 | 0.88216 | 0.81400 | 0.88403 |
| VanillaNet-UNet | 0.91312 | 0.82094 | 0.97194 | 0.87247 | 0.80388 | 0.87647 |
| VGGNet-UNet | 0.92956 | 0.84593 | 0.97178 | 0.89379 | 0.82596 | 0.89340 |
| Performance Data on Fruits Segmentation of Tomato Plants | ||||||
|---|---|---|---|---|---|---|
| Model | Accuracy | Precision | Recall | F1-Score | IoU | Avg. |
| MobileNet-UNet | 0.97937 | 0.82400 | 0.90542 | 0.85765 | 0.76290 | 0.86587 |
| MvanillaNet-UNet | 0.97931 | 0.81067 | 0.95659 | 0.87363 | 0.78425 | 0.88089 |
| ResNet-UNet | 0.97549 | 0.79425 | 0.89069 | 0.83532 | 0.72819 | 0.84443 |
| VanillaNet-UNet | 0.97091 | 0.89264 | 0.86598 | 0.87289 | 0.78367 | 0.87722 |
| VGGNet-UNet | 0.97749 | 0.82082 | 0.87785 | 0.84329 | 0.74009 | 0.85191 |
| Comparison of VGGNet-UNet vs. GA Results for Leaves Segmentation | ||||||
|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F1-Score | IoU | Avg. | |
| VGGNet-UNet | 0.92956 | 0.84593 | 0.97178 | 0.89379 | 0.82596 | 0.89340 |
| Greedy algorithm | 0.93190 | 0.92160 | 0.93640 | 0.92310 | 0.86870 | 0.91640 |
| Comparison of MVanillaNet-UNet vs. GA Results for Fruits Segmentation | ||||||
|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F1-Score | IoU | Avg. | |
| MVanillaNet-UNet | 0.97931 | 0.81067 | 0.95659 | 0.87363 | 0.78425 | 0.88089 |
| Greedy algorithm | 0.98150 | 0.89460 | 0.80780 | 0.82780 | 0.72780 | 0.84790 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerra Ibarra, J.P.; Cuevas de la Rosa, F.J.; Hernandez Vidales, J.R. Evaluation of the Effectiveness of the UNet Model with Different Backbones in the Semantic Segmentation of Tomato Leaves and Fruits. Horticulturae 2025, 11, 514. https://doi.org/10.3390/horticulturae11050514
Guerra Ibarra JP, Cuevas de la Rosa FJ, Hernandez Vidales JR. Evaluation of the Effectiveness of the UNet Model with Different Backbones in the Semantic Segmentation of Tomato Leaves and Fruits. Horticulturae. 2025; 11(5):514. https://doi.org/10.3390/horticulturae11050514
Chicago/Turabian StyleGuerra Ibarra, Juan Pablo, Francisco Javier Cuevas de la Rosa, and Julieta Raquel Hernandez Vidales. 2025. "Evaluation of the Effectiveness of the UNet Model with Different Backbones in the Semantic Segmentation of Tomato Leaves and Fruits" Horticulturae 11, no. 5: 514. https://doi.org/10.3390/horticulturae11050514
APA StyleGuerra Ibarra, J. P., Cuevas de la Rosa, F. J., & Hernandez Vidales, J. R. (2025). Evaluation of the Effectiveness of the UNet Model with Different Backbones in the Semantic Segmentation of Tomato Leaves and Fruits. Horticulturae, 11(5), 514. https://doi.org/10.3390/horticulturae11050514