
Assessing Crucial Shaking Parameters in the Mechanical Harvesting of Nut Trees: A Review

 ,
,  , , ,
, , ,  and
and
Abstract
1. Introduction
2. Diversity of Nut Species
2.1. Almond
2.2. Pistachio
2.3. Pine
2.4. Hickory/Walnut/Pecan
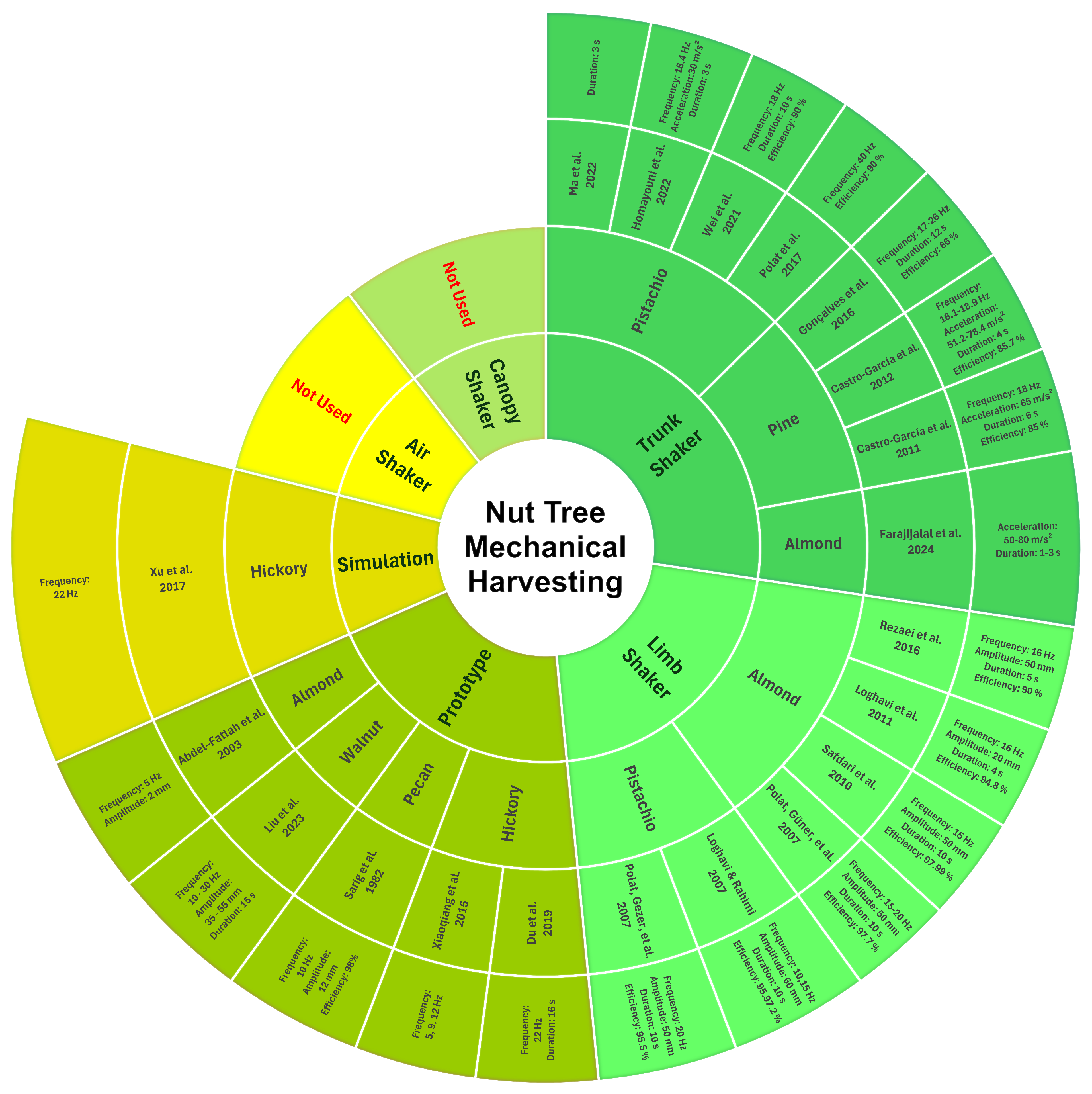
3. Nut Tree Mechanical Harvesting Methods
- represents the mass of the product harvested;
- represents the mass of the product that remains on the tree and was not successfully detached.
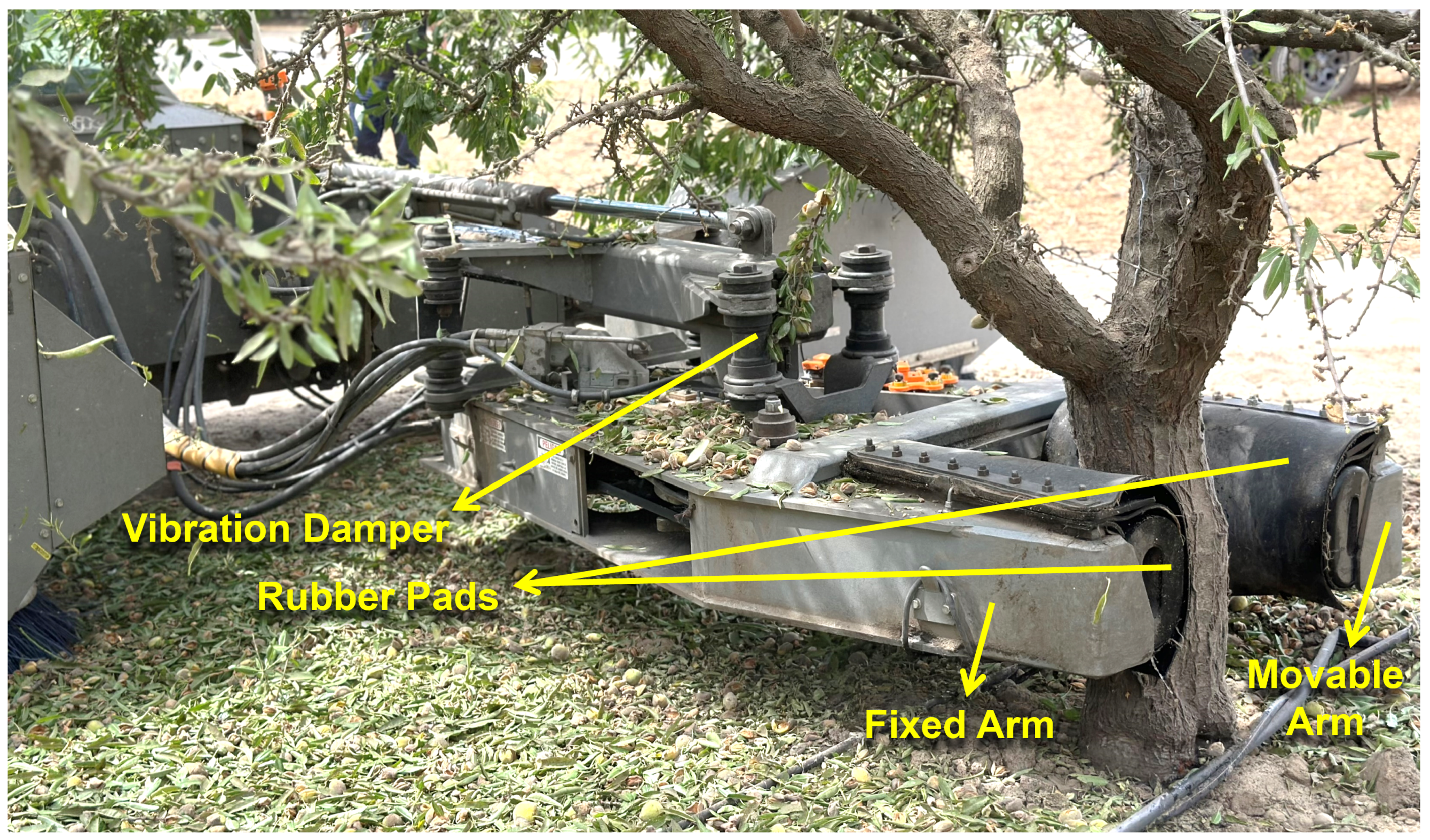
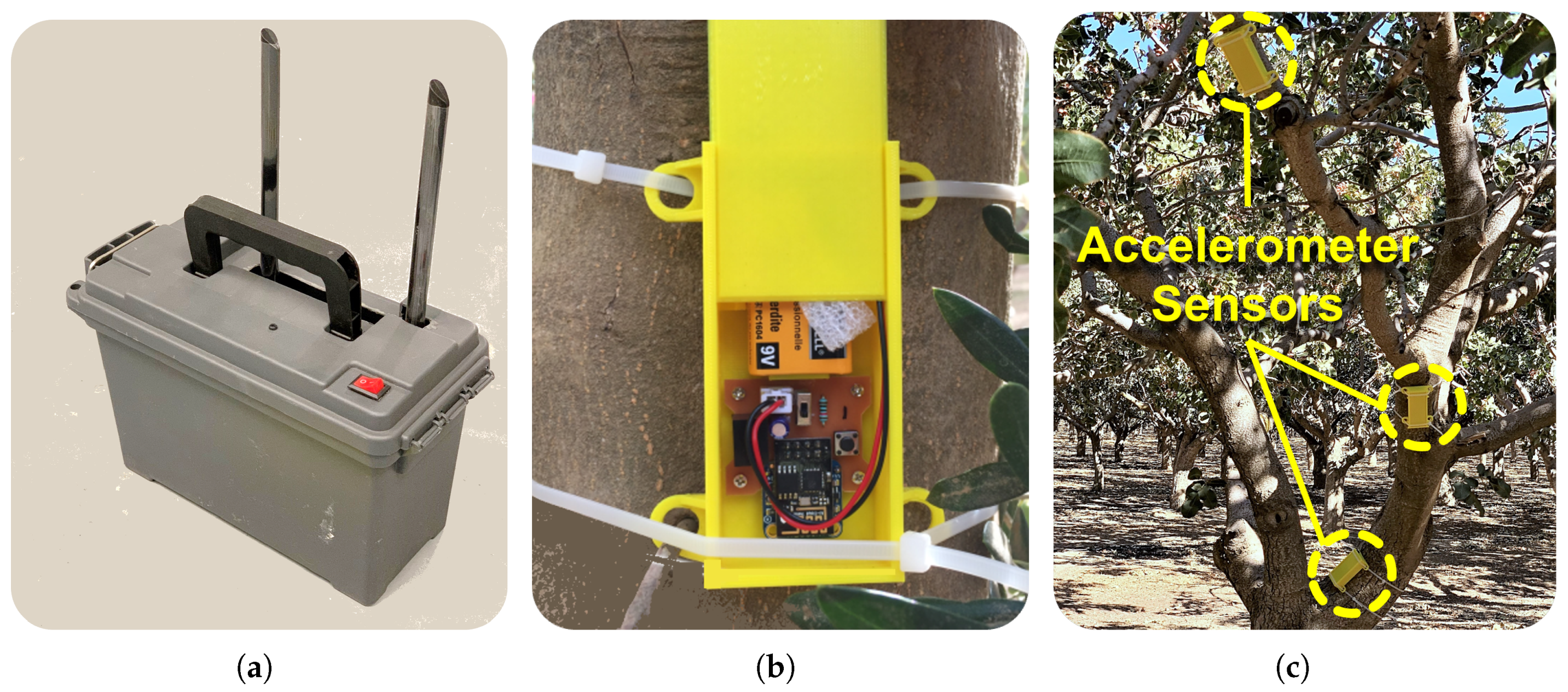
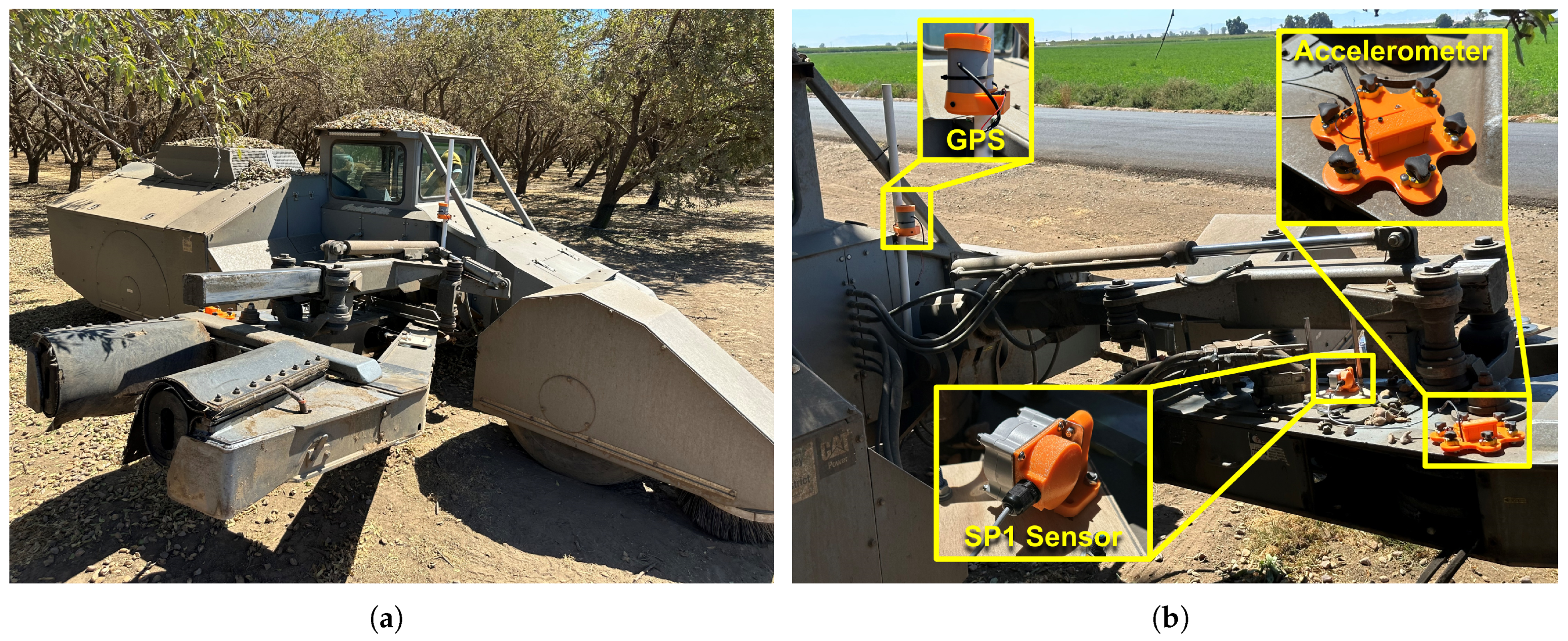
3.1. Trunk Shaker System
Tree Trunk Shaking Method Analysis
3.2. Canopy Shaker System
3.3. Limb Shaker System
Tree Limb Shaking Method Analysis
3.4. Air Shaker System
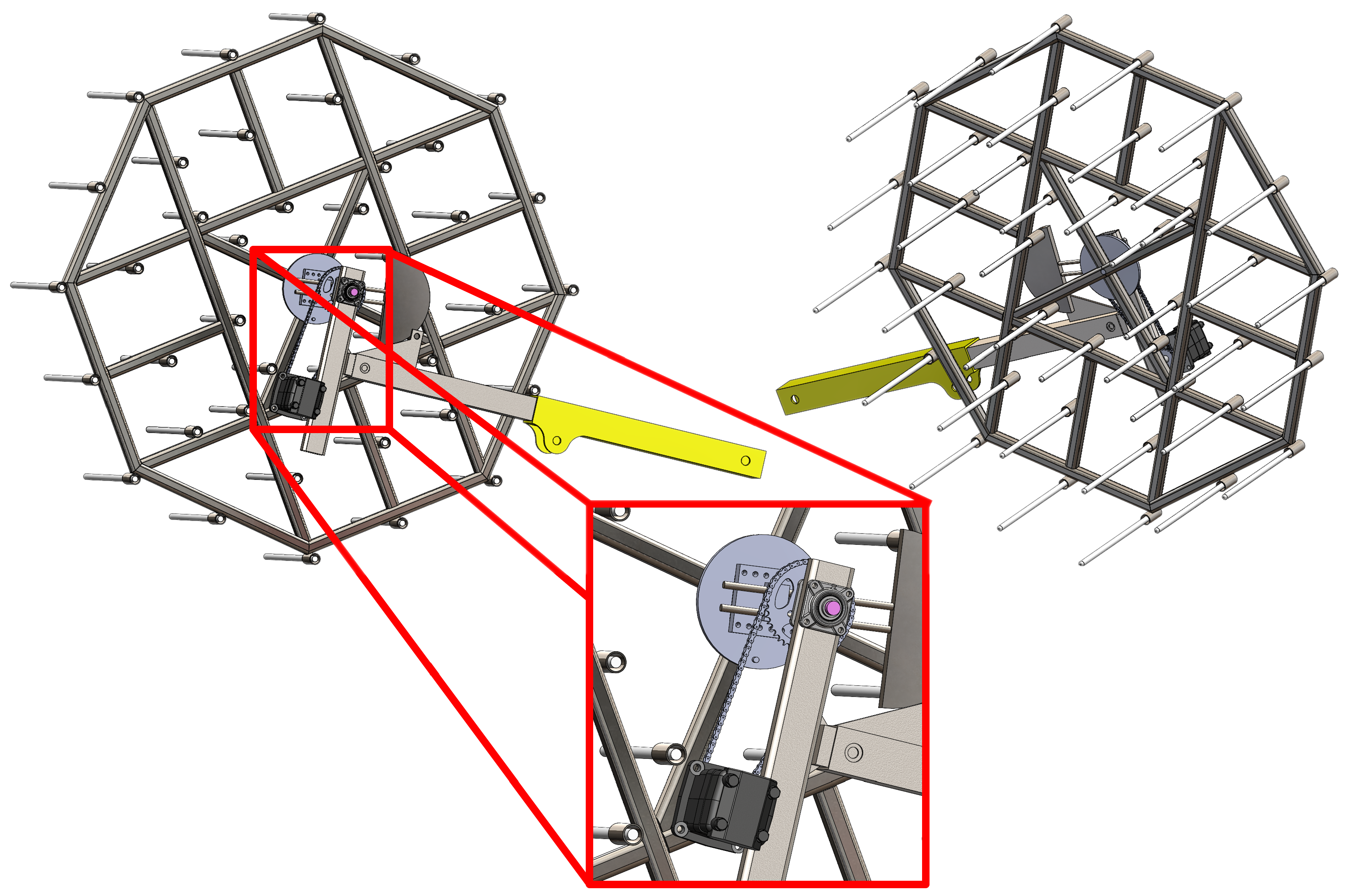
3.5. Prototype Vibrator System
3.6. Simulation
Prototype Vibrator and Simulation Method Analysis
4. Discussion
- It must be accepted by the consumer grower;
- It must meet the necessary safety standards;
- It should be economically viable and affordable for the consumer grower;
- Technically, it should be capable of performing the work efficiently;
- It should comply with the logistics processes of the harvesting operation;
- It should achieve the highest efficiency during operation while causing minimal product damage.
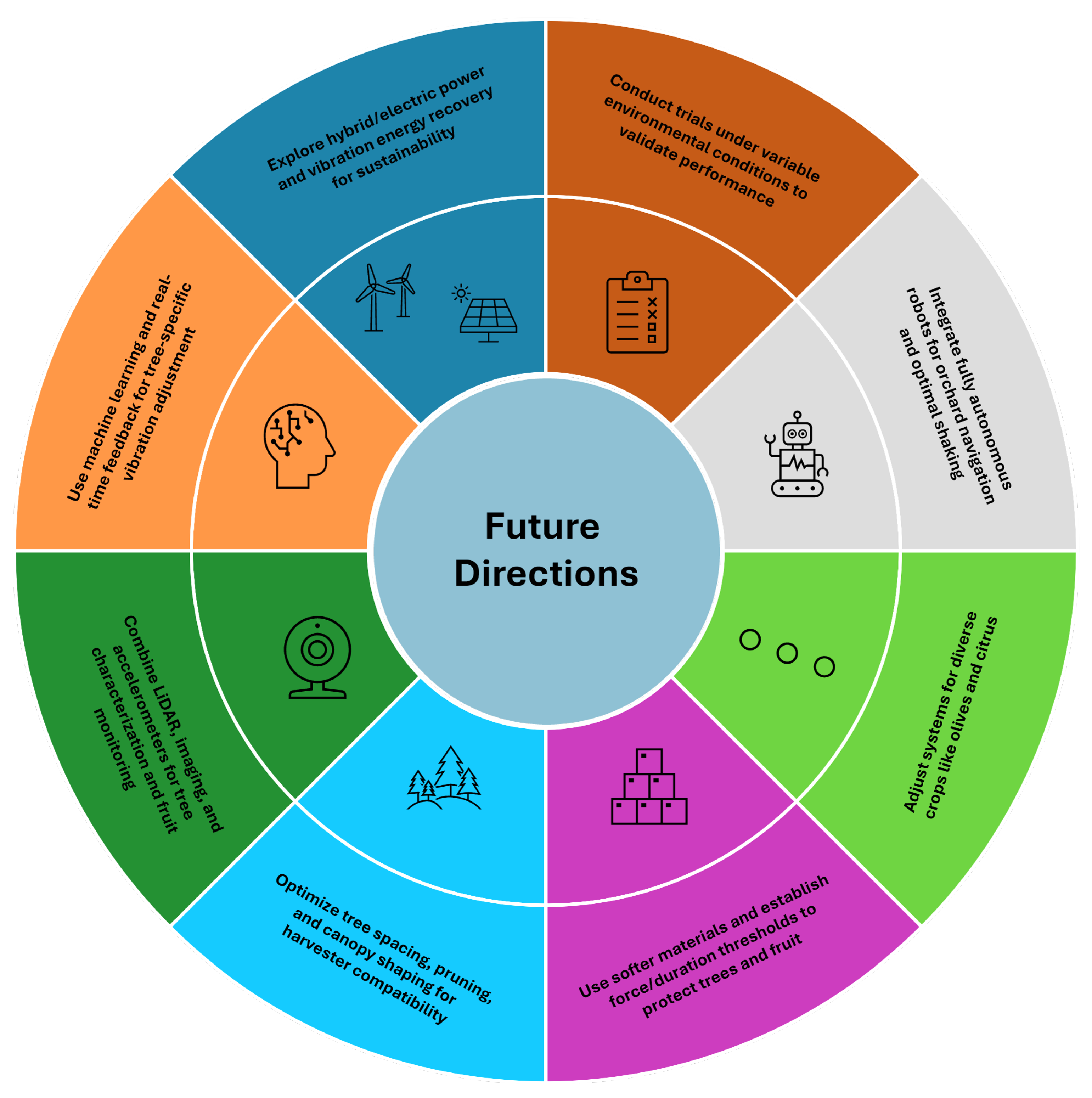
5. Future Research Opportunities and Challenges
- Field Testing Under Variable Environmental Conditions: Conduct large-scale, multi-environmental trials to evaluate the performance and reliability of shaker machines under varying temperature, humidity, and dust conditions. These trials will also identify potential limitations and areas for improvement in real-world scenarios.
- Development of Adaptive Shaking Mechanisms: Future shaker designs should incorporate machine learning algorithms and real-time sensor feedback to adjust shaking parameters—frequency, amplitude, and duration—based on the unique physical characteristics of each tree. This can minimize damage while maximizing fruit detachment efficiency.
- Integration of Multimodal Sensing Technologies: Combining LiDAR, visual imaging, and accelerometer data could enable precise tree morphology characterization and real-time fruit detachment monitoring. Research should explore cost-effective implementations of these technologies in field conditions.
- Customizable Orchard Management Practices: Conduct studies on optimizing orchard layouts and tree training techniques (e.g., pruning and canopy shaping) to enhance compatibility with mechanical harvesters. This includes defining ideal tree spacing, growth height, and branch arrangements for various nut species.
- Energy-Efficient Harvesting Solutions: Investigate alternative power sources, such as hybrid or electric systems, to reduce fuel consumption and greenhouse gas emissions. Additionally, research into vibration energy harvesting systems could lead to the development of more eco-friendly technologies.
- Tree and Fruit Damage Mitigation: Develop and test innovative materials for contact surfaces, such as softer polymers or vibration-damping coatings, that reduce bark injury and fruit bruising during harvesting. Future work should also establish guidelines for optimal shaking force thresholds and shaking duration specific to each nut species.
- Expanding Applicability to Diverse Crops: While this paper focuses on nut trees, future studies could explore the adaptability of these mechanical systems for other high-value crops like olives, citrus, and coffee. This would involve adjustments to shaking mechanisms and control algorithms to suit different fruiting characteristics.
- Automation and Robotics Integration: Incorporating fully autonomous robotic systems capable of navigating orchards, identifying target trees, and executing optimal shaking patterns without human intervention represents a transformative goal for future harvesting practices.
- Simplifying the functionality and user-friendliness of the machine during fruit harvest operations.
- Overcoming the complexity of the orchard environment that makes it challenging for sensors and algorithms to deploy in real-time, as well as for designing resilient systems to withstand weather conditions and adaptable mechanisms for various cultivars.
- Establishing standardized metrics for measuring harvester performance, such as fruit detachment efficiency (%) and tree damage rates (e.g., % bark injury per harvest cycle), and using these metrics to benchmark current technologies.
- Making a versatile machine or method to harvest across diverse orchard layouts and environmental conditions to ensure broad applicability.
6. Conclusions
- Since the accurate estimation of the frequency, amplitude, and duration of tree vibration during mechanical harvesting significantly affects the rate of fruit harvesting, establishing a relationship between these parameters and the morphological characteristics of trees, such as tree diameter, height, and canopy shape, can improve the harvesting operation. The findings indicate that as the tree’s diameter increases, the needed acceleration to shake the tree and the time required for the trees to vibrate increase. Data-driven models are the best approach to finding the optimal shaking parameters.
- Recent advancements in sensor technology, machine learning methods, and artificial intelligence enable us to develop the next generation of intelligent machines. To reduce the costs of fruit harvesting, efforts should be made to minimize the use of human labor as much as possible during the harvesting process. At present, operators’ skills determine the duration of shaking amplitude, frequency, and duration, which remain consistent for all trees. The scarcity of experienced operators who can achieve maximum fruit removal with minimal damage poses a significant challenge for growers. There is a pressing need to make existing machines smarter, allowing them to adjust shaking parameters autonomously. To achieve this, designing and manufacturing an automatic harvesting machine equipped with advanced sensors and image processing capabilities, which can accurately estimate the necessary vibration parameters for each tree, will be crucial. It is possible to mathematically determine a unique optimal shaking frequency for each tree to maximize fruit removal and minimize damage. Theoretically, the maximum displacement of a tree occurs at its natural frequency, using the least amount of energy. However, each tree has a slightly different natural frequency, influenced by its size and branch arrangement, and shaking trees at incorrect frequencies can cause significant damage. The findings of this study, including the optimal parameters, sensors, and control systems, will pave the way for the development of advanced intelligent harvesting machines. Notably, further research is needed to verify the model’s effectiveness across various nut tree varieties. Additionally, modifications to the control units of existing shakers are necessary to enable automatic adjustments of shaking patterns based on trunk size, thus eliminating the need for operator manual programming.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 4WD | Four Wheel Drive |
| ADAMS | Automated Dynamic Analysis of Mechanical Systems |
| ANSYS | Analysis System |
| BD | Branch Diameter |
| CD | Crown Diameter |
| CW | Crown Width |
| D | Tree Diameter |
| F3 | Farms Food Future |
| FDF | Fruit Detachment Force |
| GPS | Global Positioning System |
| H | Tree Height |
| Hz | Hertz |
| LiDAR | Light Detection and Ranging |
| NSF | National Sanitation Foundation |
| SWP | Stem Water Potential |
| USDA | United States Department of Agriculture |
References
- Alizadeh, A.; Mortazavi, M.; Farajijalal, M.; Toudeshki, A.; Ehsani, R.; Singhal, M. Enhancing Irrigation Efficiency with a Unified Stochastic Decision Tree Model: Predictive Analysis of Stem Water Potential in Almond and Pistachio Orchards. In Proceedings of the World Congress in Computer Science, Computer Engineering & Applied Computing, Las Vegas, NV, USA, 22–25 July 2024; Springer: Cham, Switzerland, 2024; pp. 499–515. [Google Scholar] [CrossRef]
- Cirhigiri, G.C. Qualitative Assessment of Windfall Almonds (Prunus dulcis) in California; University of California: Davis, CA, USA, 2022. [Google Scholar]
- Goodhue, R.E.; Martin, P.; Simon, L.K. California’s Fruits and Tree Nuts. In California Agriculture: Dimensions and Issues; University of California Giannini Foundation of Agricultural Economics Information Series; Giannini Foundation of Agricultural Economics: Davis, CA, USA, 2018. [Google Scholar]
- Perez, A.; Plattner, K. Fruit and Tree Nuts Outlook: Economic Insight 2012 Census of Agriculture: Overview of Fruit and Tree Nut Sector; USDA/ERS Publication FTS-359SA; U.S. Department of Agriculture: Albany, CA, USA, 2015. [Google Scholar]
- Baur, P.; Iles, A. Replacing humans with machines: A historical look at technology politics in California agriculture. Agric. Hum. Values 2023, 40, 113–140. [Google Scholar]
- Kelly, C.F. Mechanical harvesting. Sci. Am. 1967, 217, 50–59. [Google Scholar] [CrossRef]
- Luedeling, E.; Zhang, M.; Girvetz, E.H. Climatic changes lead to declining winter chill for fruit and nut trees in California during 1950–2099. PLoS ONE 2009, 4, e6166. [Google Scholar]
- Ma, R.; Homayouni, T.; Toudeshki, A.; Ehsani, R.; Zhang, X. An Experimental Study and Mathematical Modeling of Vibration Transfer in Pistachio Trees Using an Inertia-Type Trunk Shaker and Field-Adapted Wireless Sensors. Shock Vib. 2022, 2022, 9966848. [Google Scholar] [CrossRef]
- Afsah-Hejri, L.; Homayouni, T.; Toudeshki, A.; Ehsani, R.; Ferguson, L.; Castro-García, S. Mechanical harvesting of selected temperate and tropical fruit and nut trees. Hortic. Rev. 2022, 49, 171–242. [Google Scholar]
- Ferguson, L.; Glozer, K.; Reyes, H.; Rosa, U.; Castro-Garcia, S. Evaluating California pistachio trunk shaking harvesters. Acta Hort. (ISHS) 2014, 1028, 377–380. [Google Scholar] [CrossRef]
- Liu, T.H.; Ehsani, R.; Toudeshki, A.; Zou, X.J.; Wang, H.J. Experimental study of vibrational acceleration spread and comparison using three citrus canopy shaker shaking tines. Shock Vib. 2017, 2017, 9827926. [Google Scholar] [CrossRef]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F. Design and evaluation of a two-section canopy shaker with variable frequency for mechanical harvesting of citrus. Int. J. Agric. Biol. Eng. 2018, 11, 77–87. [Google Scholar] [CrossRef]
- Liu, T.H.; Ehsani, R.; Toudeshki, A.; Abbas, M.; Zou, X.J. Shaking functionality evaluation of four different types of citrus canopy-shaker tines. Appl. Eng. Agric. 2018, 34, 809–817. [Google Scholar]
- Liu, T.H.; Luo, G.; Ehsani, R.; Toudeshki, A.; Zou, X.J.; Wang, H.J. Simulation study on the effects of tine-shaking frequency and penetrating depth on fruit detachment for citrus canopy-shaker harvesting. Comput. Electron. Agric. 2018, 148, 54–62. [Google Scholar]
- Homayouni, T.; Gholami, A.; Toudeshki, A.; Afsah-Hejri, L.; Ehsani, R. Estimation of proper shaking parameters for pistachio trees based on their trunk size. Biosyst. Eng. 2022, 216, 121–131. [Google Scholar] [CrossRef]
- Manzo, C.; Maharlooei, M.; Ehsani, R.; Ferguson, L. Development and Evaluation of a Continuous Canopy Shaker for California Table Olives. In Proceedings of the 2023 ASABE Annual International Meeting, Omaha, NE, USA, 9–12 July 2023; p. 1. [Google Scholar]
- Bentaher, H.; Haddar, M.; Fakhfakh, T.; Mâalej, A. Finite elements modeling of olive tree mechanical harvesting using different shakers. Trees 2013, 27, 1537–1545. [Google Scholar] [CrossRef]
- Pu, Y.; Wang, S.; Yang, F.; Ehsani, R.; Zhao, L.; Li, C.; Xie, S.; Yang, M. Recent progress and future prospects for mechanized harvesting of fruit crops with shaking systems. Int. J. Agric. Biol. Eng. 2023, 16, 1–13. [Google Scholar] [CrossRef]
- de Almeida Moreira, B.R.; Marra, T.M.; da Silva, E.A.; de Brito Filho, A.L.; Júnior, M.R.B.; dos Santos, A.F.; da Silva, R.P.; Vellidis, G. Advancements in peanut mechanization: Implications for sustainable agriculture. Agric. Syst. 2024, 215, 103868. [Google Scholar] [CrossRef]
- Homayouni, T.; Maharlooei, M.; Toudeshki, A.; Ferguson, L.; Ehsani, R. Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone. Horticulturae 2023, 9, 640. [Google Scholar] [CrossRef]
- Kaleem, A.; Hussain, S.; Aqib, M.; Cheema, M.J.M.; Saleem, S.R.; Farooq, U. Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review. AgriEngineering 2023, 5, 2216–2237. [Google Scholar] [CrossRef]
- Ruijun, M.; Yu, C.; Xiaohua, Z.; Toudeshki, A.; Ehsani, R. Development process, mode and technology status of apple mechanized harvesting. J. Chin. Agric. Mech. 2024, 45, 301. [Google Scholar]
- Zhou, J.; He, L.; Zhang, Q.; Du, X.; Chen, D.; Karkee, M. Evaluation of the influence of shaking frequency and duration in mechanical harvesting of sweet cherry. Appl. Eng. Agric. 2013, 29, 607–612. [Google Scholar]
- García, S.C.; Ribes, J.G.; Roldán, G.B.; Vega, J.A. Mode shapes evaluation of trunk shakers used in oil olive harvesting. Trans. ASABE 2007, 50, 727–732. [Google Scholar] [CrossRef]
- Chen, L.; Zhu, H.; Sun, J. Novel method for random vibration analysis of single-degree-of-freedom vibroimpact systems with bilateral barriers. Appl. Math. Mech. 2019, 40, 1759–1776. [Google Scholar]
- Leone, A.; Romaniello, R.; Tamborrino, A.; Catalano, P.; Peri, G. Identification of vibration frequency, acceleration, and duration for efficient olive harvesting using a trunk shaker. Trans. ASABE 2015, 58, 19–26. [Google Scholar]
- Leylaz, G.; Ma, S.; Sun, J.Q. An optimal model identification algorithm of nonlinear dynamical systems with the algebraic method. J. Vib. Acoust. 2021, 143, 021002. [Google Scholar]
- Zheng, Y.G.; Huang, J.W.; Sun, Y.H.; Sun, J.Q. Building vibration control by active mass damper with delayed acceleration feedback: Multi-objective optimal design and experimental validation. J. Vib. Acoust. 2018, 140, 041002. [Google Scholar] [CrossRef]
- Whitney, D.; Smerage, G.; Block, W. Dynamic Analysis Of A Trunk Shaker-Post System J. Trans. ASAE 1990, 33, 1066–1070. [Google Scholar] [CrossRef]
- Láng, Z. Dynamic modelling structure of a fruit tree for inertial shaker system design. Biosyst. Eng. 2006, 93, 35–44. [Google Scholar] [CrossRef]
- Savary, S.; Ehsani, R.; Schueller, J.; Rajaraman, B. Simulation study of citrus tree canopy motion during harvesting using a canopy shaker. Trans. ASABE 2010, 53, 1373–1381. [Google Scholar]
- Hoshyarmanesh, H.; Dastgerdi, H.R.; Ghodsi, M.; Khandan, R.; Zareinia, K. Numerical and experimental vibration analysis of olive tree for optimal mechanized harvesting efficiency and productivity. Comput. Electron. Agric. 2017, 132, 34–48. [Google Scholar] [CrossRef]
- Sanchez-Cachinero, P.; Luque-Mohedano, R.; Sola-Guirado, R.R. Computational model for the dynamic characterisation of a trunk shaker. Agriculture 2022, 12, 2158. [Google Scholar] [CrossRef]
- Zhang, P.; Yan, D.; Cai, X.; Chen, Y.; Luo, L.; Pan, Y.; Zou, X. Multidirectional Dynamic Response and Swing Shedding of Grapes: An Experimental and Simulation Investigation under Vibration Excitation. Agronomy 2023, 13, 869. [Google Scholar] [CrossRef]
- Česnik, M.; Slavič, J.; Boltežar, M. Uninterrupted and accelerated vibrational fatigue testing with simultaneous monitoring of the natural frequency and damping. J. Sound Vib. 2012, 331, 5370–5382. [Google Scholar] [CrossRef]
- Pye, C.J. Accurate Frequency Measurement on Small Structures with Shaker Excitation. In Topics in Modal Analysis & Testing, Volume 10, Proceedings of the 34th IMAC, A Conference and Exposition on Structural Dynamics, Dearborn, MI, USA, 26–29 January 2016; Springer: Cham, Switzerland, 2016; pp. 403–407. [Google Scholar]
- Smith, C.C.; Staffanson, F.L. Basic mechanical interactions in shaker testing. Shock Vib. 1997, 4, 269–280. [Google Scholar] [CrossRef]
- Whitney, J.; BenSalem, E.; Salyani, M. The effect of trunk shaker patterns on Florida orange removal. Appl. Eng. Agric. 2001, 17, 461. [Google Scholar] [CrossRef]
- Balaji, P.S.; Karthik SelvaKumar, K. Applications of nonlinearity in passive vibration control: A review. J. Vib. Eng. Technol. 2021, 9, 183–213. [Google Scholar] [CrossRef]
- Rao, S.S. Vibration of Continuous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Shabana, A.A. Theory of Vibration: An Introduction; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Loghavi, M.; Mohseni, S. The effects of shaking frequency and amplitude on detachment of lime fruit. Iran Agric. Res. 2007, 24, 27–38. [Google Scholar]
- He, L.; Zhou, J.; Du, X.; Chen, D.; Zhang, Q.; Karkee, M. Energy efficacy analysis of a mechanical shaker in sweet cherry harvesting. Biosyst. Eng. 2013, 116, 309–315. [Google Scholar] [CrossRef]
- Rosa, U.; Cheetancheri, K.; Gliever, C.; Lee, S.; Thompson, J.; Slaughter, D. An electro-mechanical limb shaker for fruit thinning. Comput. Electron. Agric. 2008, 61, 213–221. [Google Scholar] [CrossRef]
- Loghavi, M.; Taj Abadipoor, A.; Rahimi, H. Investigation of the Effect of Shaking Amplitude and Frequency Levels on Pistachio Nut or Cluster Detachment; International System for Agricultural Science and Technology (AGRIS): Rome, Italy, 2004. [Google Scholar]
- Ackerman, S.A.; Talbot, B.; Astrup, R. The effect of tree and harvester size on productivity and harvester investment decisions. Int. J. For. Eng. 2022, 33, 22–32. [Google Scholar] [CrossRef]
- Du, X.; Chen, K.; Ma, Z.; Wu, C.; Zhang, G. Design, construction, and evaluation of a three-dimensional vibratory harvester for tree fruit. Appl. Eng. Agric. 2020, 36, 221–231. [Google Scholar] [CrossRef]
- Toudeshki, A.; Ehsani, R.; Ferguson, L. Effect of trunk size on the effectiveness of pistachio harvesters. In VIII International Symposium on Almonds and Pistachios 1406; Acta Horticulturae: Davis, CA, USA, 2023; pp. 273–280. [Google Scholar]
- Li, J.; Su, S. Abscission in plants: From mechanism to applications. Adv. Biotechnol. 2024, 2, 27. [Google Scholar] [CrossRef]
- Manjunatha, K.; Savadi, S.; Adiga, J.; Balasubramanian, D.; Naik, R.; Muralidhara, B.; Chethan, C. Evaluation of fruit detachment forces and related characteristics reveals differential fruit detachments at developmental stages and cultivar differences in cashew. Sci. Hortic. 2024, 331, 113128. [Google Scholar] [CrossRef]
- Famiani, F.; Tombesi, A.; Farinelli, D.; Tombesi, S. The fruit detachment force/fruit weight ratio can be used to predict the harvesting yield and the efficiency of trunk shakers on mechanically harvested olives. In Proceedings of the I International Symposium on Mechanical Harvesting and Handling Systems of Fruits and Nuts 965, Lake Alfred, FL, USA, 2–4 April 2012; pp. 61–64. [Google Scholar]
- Vahdati, K.; Sarikhani, S.; Arab, M.M.; Leslie, C.A.; Dandekar, A.M.; Aletà, N.; Bielsa, B.; Gradziel, T.M.; Montesinos, Á.; Rubio-Cabetas, M.J.; et al. Advances in rootstock breeding of nut trees: Objectives and strategies. Plants 2021, 10, 2234. [Google Scholar] [CrossRef] [PubMed]
- Brufau, G.; Boatella, J.; Rafecas, M. Nuts: Source of energy and macronutrients. Br. J. Nutr. 2006, 96, S24–S28. [Google Scholar] [CrossRef] [PubMed]
- Miraliakbari, H.; Shahidi, F. Lipid class compositions, tocopherols and sterols of tree nut oils extracted with different solvents. J. Food Lipids 2008, 15, 81–96. [Google Scholar] [CrossRef]
- Ryan, E.; Galvin, K.; O’connor, T.; Maguire, A.; O’brien, N. Fatty acid profile, tocopherol, squalene and phytosterol content of brazil, pecan, pine, pistachio and cashew nuts. Int. J. Food Sci. Nutr. 2006, 57, 219–228. [Google Scholar]
- Tsantili, E.; Takidelli, C.; Christopoulos, M.; Lambrinea, E.; Rouskas, D.; Roussos, P. Physical, compositional and sensory differences in nuts among pistachio (Pistachia vera L.) varieties. Sci. Hortic. 2010, 125, 562–568. [Google Scholar]
- Venkatachalam, M.; Sathe, S.K. Chemical composition of selected edible nut seeds. J. Agric. Food Chem. 2006, 54, 4705–4714. [Google Scholar] [CrossRef]
- Bolling, B.W.; Chen, C.Y.O.; McKay, D.L.; Blumberg, J.B. Tree nut phytochemicals: Composition, antioxidant capacity, bioactivity, impact factors. A systematic review of almonds, Brazils, cashews, hazelnuts, macadamias, pecans, pine nuts, pistachios and walnuts. Nutr. Res. Rev. 2011, 24, 244–275. [Google Scholar] [CrossRef]
- Dreher, M.L.; Maher, C.V.; Kearney, P. The traditional and emerging role of nuts in healthful diets. Nutr. Rev. 1996, 54, 241–245. [Google Scholar] [CrossRef]
- Grosso, G.; Estruch, R. Nut consumption and age-related disease. Maturitas 2016, 84, 11–16. [Google Scholar]
- Kornsteiner, M.; Wagner, K.H.; Elmadfa, I. Tocopherols and total phenolics in 10 different nut types. Food Chem. 2006, 98, 381–387. [Google Scholar]
- Ros, E. Nuts and CVD. Br. J. Nutr. 2015, 113, S111–S120. [Google Scholar] [CrossRef] [PubMed]
- Rusu, M.E.; Mocan, A.; Ferreira, I.C.; Popa, D.S. Health benefits of nut consumption in middle-aged and elderly population. Antioxidants 2019, 8, 302. [Google Scholar] [CrossRef] [PubMed]
- Badenes, M.L.; Byrne, D.H. Fruit Breeding; Springer Science & Business Media: Cham, Switzerland, 2012; Volume 8. [Google Scholar]
- Boriss, H.; Brunke, H. Commodity Profile: Almonds; University of California-Davis, Agricultural Issues Center: Davis, CA, USA, 2005. [Google Scholar]
- Moore, J.N.; Janick, J. Advances in Fruit Breeding; Purdue University Press: West Lafayette, IN, USA, 1975. [Google Scholar]
- Kodad, O.; López Francos, A.; Rovira, M. XVI GREMPA Meeting on Almonds and Pistachios; CIHEAM: Zaragoza, Spain, 2016. [Google Scholar]
- Weber, C.; Simnitt, S.; Wechsler, S.; Wakefield, H. Fruit and Tree Nuts Outlook: September 2023; U.S. Department of Agriculture: Albany, CA, USA, 2023. [Google Scholar]
- USDA. 2023 California Almond Objective Measurement Report. 2023. Available online: https://www.nass.usda.gov/Statistics_by_State/California/Publications/Specialty_and_Other_Releases/Almond/Objective-Measurement/2023almondOM.pdf (accessed on 21 January 2025).
- Alizadeh, A.; Farajijalal, M.; Rezvani, Z.; Toudeshki, A.; Ehsani, R. Developing a data-driven model for predicting water stress in pistachio trees. In International Congress on Agricultural Mechanization and Energy in Agriculture; Springer: Cham, Switzerland, 2023; pp. 186–196. [Google Scholar]
- Rosa, U.; Rosenstock, T.; Choi, H.; Pursell, D.; Gliever, C.; Brown, P.; Upadhyaya, S. Design and evaluation of a yield monitoring system for pistachios. Trans. ASABE 2011, 54, 1555–1567. [Google Scholar] [CrossRef]
- Polat, R.; Acar, I.; Bilim, C.H.; Sağlam, R.; Erol, B.A. Determination of spring rigidity and fruit detachment force with respect to harvesting technique in pistachio nut trees. Afr. J. Agric. Res. 2011, 6, 532–537. [Google Scholar]
- Zhang, H.; Zhang, Z. Advances in edible pine nut trees (Pinus spp.) breeding strategies. In Advances in Plant Breeding Strategies: Nut and Beverage Crops; Springer: Cham, Switzerland, 2019; Volume 4, pp. 301–351. [Google Scholar]
- Mutke, S.; Calama, R.; González-Martínez, S.C.; Montero, G.; Javier Gordo, F.; Bono, D.; Gil, L. 4 mediterranean stone pine: Botany and horticulture. Hortic. Rev. 2012, 39, 153–201. [Google Scholar]
- Richardson, D.M.; Higgins, S.I. Pines as Invaders in the Southern Hemisphere; Cambridge Univ. Press: Cambridge, UK, 2000. [Google Scholar]
- Huang, Y.; Xiao, L.; Zhang, Z.; Zhang, R.; Wang, Z.; Huang, C.; Huang, R.; Luan, Y.; Fan, T.; Wang, J.; et al. The genomes of pecan and Chinese hickory provide insights into Carya evolution and nut nutrition. GigaScience 2019, 8, giz036. [Google Scholar] [CrossRef]
- Liu, C.; Xu, D.; Cao, J. Vibration response of walnuts under vibration harvesting. Agronomy 2023, 13, 461. [Google Scholar] [CrossRef]
- Siebeneichler, T.J.; Hoffmann, J.F.; Galli, V.; Zambiazi, R.C. Composition and impact of pre-and post-harvest treatments/factors in pecan nuts quality. Trends Food Sci. Technol. 2023, 131, 46–60. [Google Scholar] [CrossRef]
- Sarig, Y.; Nahir, D.; Emek, M.; Grosz, F.; Beres, H.; Rasis, A. Development of a Mechanical Pecan Harvester. Trans. ASAE 1982, 25, 586–589. [Google Scholar]
- Rains, G.C.; Thomas, D.L.; Perry, C.D. Pecan mechanical harvesting parameters for yield monitoring. Trans. ASAE 2002, 45, 281. [Google Scholar] [CrossRef]
- de Langre, E. Plant vibrations at all scales: A review. J. Exp. Bot. 2019, 70, 3521–3531. [Google Scholar] [PubMed]
- Inman, D.J.; Singh, R.C. Engineering Vibration; Prentice Hall Englewood Cliffs: Englewood Cliffs, NJ, USA, 1994; Volume 3. [Google Scholar]
- Rao, S. Mechanical Vibrations; Prentice Hall: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Thomson, W. Theory of Vibration with Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Gonçalves, A.C.; Dias, A.B.; Afonso, A.; Pereira, D.G.; Pinheiro, A.; Peça, J.O. Mechanical versus manual harvest of Pinus pinea cones. Biosyst. Eng. 2016, 143, 50–60. [Google Scholar]
- Polat, R.; Güner, M.; Erdogan, D.; Gezer, İ.; Atay, U.; Aktaş, T. Determination of optimum shaking frequency and amplitude of prototype body shaker used for mechanical harvesting of pistachio. In Proceedings of the International Symposium on Actual Tasks on Agricultural Engineering, Opatija, Croatia, 21–24 February 2017. [Google Scholar]
- Antonelli, D.; Monarca, D.; Cecchini, M. Modern machines for walnut harvesting. In Proceedings of the V International Walnut Symposium 705, Sorrento, Italy, 9–13 September 2004; pp. 505–513. [Google Scholar]
- Loghavi, M.; Khorsandi, F.; Kamgar, S.; Souri, S. The effects of shaking frequency and amplitude on detachment of Estahban dried fig (Ficus carica cv. Sabz). In Proceedings of the XVIIth World Congress of the International Commission of Agricultural and Biosystems Engineering, Québec City, QC, Canada, 13–17 June 2010. [Google Scholar]
- William, A. Fruit and Nut Harvester. U.S. Patent 1,472,262, 30 October 1923. [Google Scholar]
- Affeldt Jr, H.; Brown, G.; Gerrish, J. A new shaker for fruit and nut trees. J. Agric. Eng. Res. 1989, 44, 53–66. [Google Scholar] [CrossRef]
- Farajijalal, M.; Malek, S.; Toudeshki, A.; Viers, J.H.; Ehsani, R. Data-Driven Model to Improve Mechanical Harvesters for Nut Trees. In Proceedings of the 2024 ASABE Annual International Meeting, Anaheim, CA, USA, 28–31 July 2024; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2024; p. 1. [Google Scholar]
- Castro-García, S.; Blanco-Roldán, G.L.; Gil-Ribes, J.A. Frequency response of Pinus pinea L. for selective cone harvesting by vibration. Trees 2011, 25, 801–808. [Google Scholar] [CrossRef]
- Castro-García, S.; Blanco-Roldán, G.; Gil-Ribes, J. Vibrational and operational parameters in mechanical cone harvesting of stone pine (Pinus pinea L.). Biosyst. Eng. 2012, 112, 352–358. [Google Scholar] [CrossRef]
- Wei, J.; Yang, G.Y.; Yan, H.; Jing, B.; Yu, Y. Rigid-flexible coupling simulation and experimental vibration analysis of pistachio tree for optimal mechanized harvesting efficiency. Mech. Adv. Mater. Struct. 2021, 28, 2360–2369. [Google Scholar]
- Sarkar, P. Use of shaking mechanism and robotic arm in fruit harvesting: A comprehensive review. J. Crop. Weed 2021, 17, 1–9. [Google Scholar] [CrossRef]
- Sanders, K. Orange harvesting systems review. Biosyst. Eng. 2005, 90, 115–125. [Google Scholar]
- Ferguson, L. Trends in olive fruit handling previous to its industrial transformation. Grasas Y Aceites 2006, 57, 9–15. [Google Scholar] [CrossRef]
- Sumner, H. Selective harvesting of Valencia oranges with a vertical canopy shaker. System 1970, 16, 1024–1026. [Google Scholar]
- Polat, R.; Gezer, I.; Guner, M.; Dursun, E.; Erdogan, D.; Bilim, H.C. Mechanical harvesting of pistachio nuts. J. Food Eng. 2007, 79, 1131–1135. [Google Scholar] [CrossRef]
- Erdoǧan, D.; Güner, M.; Dursun, E.; Gezer, İ. Mechanical harvesting of apricots. Biosyst. Eng. 2003, 85, 19–28. [Google Scholar]
- Polat, R.; Güner, M.; Dursun, E.; Erdogan, D.; Gezer, I.; Cem Bilim, H. Mechanical harvesting of almond with an inertia type limb shaker. Asian J. Plant Sci. 2007, 6, 528–532. [Google Scholar] [CrossRef]
- Loghavi, M.; Rahimi, H. Effects of shaking amplitude and frequency on nut and cluster detachment of two varieties of pistachio. J. Sci. Technol. Agric. Nat. Resour. 2007, 11, 109–123. [Google Scholar]
- Safdari, A.; Ghassemzadeh, H.; Abdollahpour, S.; Ghafari, H. Design, construction and evaluation of a portable limb shaker for almond tree. Aust. J. Agric. Eng. 2010, 1, 179–183. [Google Scholar]
- Adrian, P.A.; Fridley, R.; Lorenzen, C. Forced vibration of a tree limb. Trans. ASAE 1965, 8, 473–0475. [Google Scholar]
- Loghavi, M.; Khorsandi, F.; Souri, S. The effects of shaking frequency and amplitude on vibratory harvesting of almond (Prunus dulcis L. cv. 7Shahrood). In Proceedings of the 2011 Asabe Annual International Meeting, Louisville, KT, USA, 7–10 August 2011; p. 1. [Google Scholar]
- Rezaei, A.; Loghavi, M.; Kamgar, S. Mechanical harvesting of wild almond (Amygdales scoparia) by a pneumatic branch shaker. Int. J. Adv. Agric. Sci. Technol. 2016, 3, 1–15. [Google Scholar]
- Jutras, P.; Coppock, G.; Patterson, E. Harvesting citrus fruit with an oscillating air blast. Trans. ASAE 1963, 6, 192–194. [Google Scholar]
- Abdel-Fattah, H.; Shackel, K.; Slaughter, D. Methodology for determining almond shaker displacement and frequency. Appl. Eng. Agric. 2003, 19, 141. [Google Scholar]
- Xiaoqiang, D.; Chuanyu, W.; Leiying, H.; Junhua, T. Dynamic characteristics of dwarf Chinese hickory trees under impact excitations for mechanical fruit harvesting. Int. J. Agric. Biol. Eng. 2015, 8, 17–25. [Google Scholar]
- Du, X.; Jiang, F.; Li, S.; Xu, N.; Li, D.; Wu, C. Design and experiment of vibratory harvesting mechanism for Chinese hickory nuts based on orthogonal eccentric masses. Comput. Electron. Agric. 2019, 156, 178–186. [Google Scholar]
- Aragon-Rodriguez, F.; Castro-Garcia, S.; Real-Moreno, S.; Garcia-Mozo, H.; Sola-Guirado, R.R.; Agüera-Vega, J. Vibrational response of the male ‘peter’pistachio branch organs to facilitate artificial pollination. Biosyst. Eng. 2022, 221, 274–282. [Google Scholar]
- Cao, J.; Bai, X.; Xu, D.; Li, W.; Chen, C. Experiment and analysis on walnut (Juglans regia L.) shedding force based on low-frequency vibration response. Ind. Crop. Prod. 2023, 204, 117242. [Google Scholar]
- Xu, N.; Du, X.; Liu, E.; Li, D.; Du, J.; Wu, C. Analysis of the hickory tree motion under the excitation of eccentric-type vibratory mechanism. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Brown, G.K. New mechanical harvesters for the Florida citrus juice industry. HortTechnology 2005, 15, 69. [Google Scholar]
- Martinez-Romero, D.; Serrano, M.; Carbonell, A.; Castillo, S.; Riquelme, F.; Valero, D. Mechanical damage during fruit post-harvest handling: Technical and physiological implications. In Production Practices and Quality Assessment of Food Crops: Quality Handling and Evaluation; Springer: Cham, Switzerland, 2004; pp. 233–252. [Google Scholar]
- Halderson, J.L. Fundamental factors in mechanical cherry harvesting. Trans. ASAE 1966, 9, 681–0684. [Google Scholar]
- Li, P.; Lee, S.h.; Hsu, H.Y. Review on fruit harvesting method for potential use of automatic fruit harvesting systems. Procedia Eng. 2011, 23, 351–366. [Google Scholar]
- Ravetti, L.; Ravetti, L. Guide to Efficient Olive Harvesting; Rural Industries Research and Development Corporation: Goulburn, Australia, 2008. [Google Scholar]
- Jimenez-Jimenez, F.; Blanco-Roldan, G.; Castillo-Ruiz, F.; Castro-Garcia, S.; Sola-Guirado, R.; Gil-Ribes, J. Table olives mechanical harvesting with trunk shakers: Orchard adaption and machine improvements. Chem. Eng. Trans. 2015, 44, 271–276. [Google Scholar]
- Pellerin, R.; Millier, W.; Lakso, A.; Rehkugler, G.; Throop, J.; Allport, T. Apple harvesting with an inertial vs. impulse trunk shaker on open-center and central-leader trees—part I. Trans. ASAE 1978, 21, 407–0413. [Google Scholar]
- Xing, H.; Ma, S.; Liu, M.; Wang, M.; Wei, Y.; Hu, J.; Wang, F.; Xing, H.; Bai, J. Evaluation of shake-and-catch methods on harvesting of tall spindle apples. Trans. ASABE 2020, 63, 857–863. [Google Scholar]
- Zhang, X.; He, L.; Karkee, M.; Whiting, M.D.; Zhang, Q. Field evaluation of targeted shake-and-catch harvesting technologies for fresh market apple. Trans. ASABE 2020, 63, 1759–1771. [Google Scholar]
- Torregrosa, A.; Ortí, E.; Martín, B.; Gil, J.; Ortiz, C. Mechanical harvesting of oranges and mandarins in Spain. Biosyst. Eng. 2009, 104, 18–24. [Google Scholar]
- Fridley, R.B.; Brown, G.K.; Adrian, P.A. Strength characteristics of fruit tree bark. Hilgardia 1970, 40, 205–222. [Google Scholar]
- Catania, P.; Bono, F.; Vallone, M. Evaluation of the vibrations transmitted to the hand-arm system in the use of portable harvesters for olives. Agric. Eng. Int. CIGR J. 2017, 19, 129–138. [Google Scholar]
- Roka, F.; Ehsani, R.; Futch, S.; Hyman, B. Citrus Mechanical Harvesting Systems-Continuous Canopy Shakers; Food and Economic Resources Department: Gainesville, FL, USA, 2014; pp. 1–5. [Google Scholar]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F.; Abdulridha, J. Selection and experimental evaluation of shaking rods of canopy shaker to reduce tree damage for citrus mechanical harvesting. Int. J. Agric. Biol. Eng. 2018, 11, 48–54. [Google Scholar] [CrossRef]
- Berlage, A.G. Apple harvesting trials with oscillating air jets. Trans. ASAE 1973, 16, 460–461. [Google Scholar] [CrossRef]
- Whitney, J. Design and performance of an air shaker for citrus fruit removal. Trans. ASAE 1977, 20, 52–0056. [Google Scholar] [CrossRef]
- Bac, C.W.; Van Henten, E.J.; Hemming, J.; Edan, Y. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J. Field Robot. 2014, 31, 888–911. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Optimal Parameters | Actual Parameters |
|---|---|---|
| Excitation force amplitude (N) | 3000 | |
| Clamping height (mm) | 700 | 650 |
| Vibration frequency (Hz) | 18 |
| Nut Tree | Shaking Method | Tree Size (cm) | Frequency (Hz) | Acceleration (m/s2) | Duration (s) | Efficiency (%) | Description | Field Test Date | Location | References |
|---|---|---|---|---|---|---|---|---|---|---|
| Pine Cones | Trunk Shaker System | D 1: 37.4 H: 980 | 18 | 65 | 6 | 85 | A trunk shaker mounted on a tractor, equipped with a flow regulator integrated into its hydraulic circuit, allows precise acceleration and frequency adjustments during vibration. | March 2010 | Spain (Cordoba) | [92] |
| Pine Cones | Trunk Shaker System | D: 37.4/36.3 H: 980/1120 | 16.1–18.9 | 51.2–78.4 | 4 | 85.7 | A trunk shaker mounted on a 116 kW tractor featuring a flow regulator integrated into its hydraulic system, capable of adjusting the rotational speed of its eccentric mass, thus altering acceleration and frequency values during vibration. | March 2010 January 2011 | Spain (Southern) | [93] |
| Pine Cones | Trunk Shaker System | D: 35.6 H: 1040 | 17–26 | — | 12 | 86 | A trunk shaker mounted on the front loader of a 118 kW, 4WD agricultural tractor, incorporating a shaking head, a support frame, and a hydraulic power pack. The system consists of an oil reservoir, two hydraulic piston pumps, a hydraulic gear pump, electro-control valves, an oil cooler, and an oil filter. | — | Portugal (Alcácer do Sal) | [85] |
| Pistachio | Trunk Shaker System | 35 years old 2 | 40 | — | — | 90 | A body shaker mounted to a tractor’s three-point linkage system, powered by a 70 BG engine and driven through a power take-off system. The setup included a hydraulic pump that transferred motion from the power take-off to a hydraulic motor. Three different amplitude and frequency settings were applied during shaking. Following each application, fallen fruits were collected using a catching mechanism. | September October | Turkey (Sanliurfa) | [86] 3 |
| Pistachio | Trunk Shaker System | D: 16–28 Clamping Height: 70 | 18 | — | 10 | 90 | A hydraulically powered vibration device, driven by the tractor and consisting mainly of an arm lock, rotary arm, hydraulic cylinder, tank body, eccentric block, and rubber components. The vibration device uses inertial excitation from rotating eccentric blocks, with an optimal excitation frequency range of 10–18 Hz for vibration harvesting. | — | USA (California) | [94] |
| Pistachio | Trunk Shaker System | D: 20–30 | 18.4 | 30 | 3 | — | A trunk shaker with a centralized computer control system, which managed all phases of the shaking process. Wireless 3D accelerometer sensors were used to measure vibration transmission through the tree canopy at multiple points. | September 2019 | USA (California) | [15] |
| Pistachio | Trunk Shaker System | D: 19–35 Clamping Height: 30 | — | — | 3 | — | An inertia-type trunk shaker mechanical harvesting machine (catching frame shaker) was equipped with a computerized shaking pattern controller. The shaker head was securely clamped to the trunk at a height of 0.3 m above ground level. The experiment utilized four distinct shaking patterns. | — | USA (California) | [8] |
| Almond | Trunk Shaker System | D: 28–32 | — | 50–80 | 1–3 | — | A trunk shaker machine utilizes a sophisticated reverse scissor mechanism to securely grasp and stabilize the almond tree trunk for effective shaking. Also, a sensor system to monitor force distribution throughout the tree canopy was designed and implemented. | August 2023 | USA (California) | [91] |
| Nut Tree | Shaking Method | Tree Size (cm) | Frequency (Hz) | Amplitude (mm) | Duration (s) | Efficiency (%) | Description | Field Test Date | Location | References |
|---|---|---|---|---|---|---|---|---|---|---|
| Pistachio | Limb Shaker System | D 1: 24–31 H: 300–500 CW: 600–800 | 20 | 50 | 10 | 95.5 | An inertia-type limb shaker, powered hydraulically and driven by the tractor’s power take-off. It includes a hydraulic pump, hydraulic motor, tank, flow control valve, hydraulic cylinder, direction control valve, and a vertical steel tubular frame. | September 2005 | Turkey (Gaziantep) | [99] |
| Pistachio 2 | Limb Shaker System | 15–25 years old | 10, 15 | 60, 60 | 10, 10 | 95, 97.2 | A tractor-mounted limb shaking machine, equipped with adjustable vibration frequency (5 to 20 Hz) and amplitude (20 to 100 mm). The design includes components such as the chassis, power transmission system, clutch, oscillation mechanism, beam, and connecting clip. | September 2000/2001 | Iran (Kerman) | [102] |
| Almond | Limb Shaker System | H: 385 CW: 330 | 15–20 | 50 | 10 | 97.7 | A hydraulically powered inertia-type limb shaker, driven by the tractor’s power take-off, utilizes a counterweight mechanism to generate oscillatory forces. The hydraulic system controls vibration frequency and amplitude for optimal energy transfer, maximizing nut detachment while minimizing tree stress. The counterweight mechanism enhances efficiency by balancing the shaker’s movement and reducing excessive force on the limb. | August 2010 | Turkey (Gaziantep) | [101] |
| Almond | Limb Shaker System | Attached to tree limbs 50–100 cm away from the trunk | 15 | 50 | 10 | 97.99 | A 2-stroke engine-powered limb shaker with a centrifugal clutch and gearbox utilized a slider-crank mechanism to transmit power through a boom and a C-shaped clamp. The gearbox, equipped with spiral bevel gears, reduced rotational speed and changed rotation direction. The slider-crank mechanism produced a fixed 50 mm reciprocating motion, driven by an eccentric pin positioned 25 mm off the crank’s center of rotation. | August 2009 | Iran (Shabestar) | [103] |
| Almond | Limb Shaker System | BD: 3–4 | 16 | 20 | 4 | 94.8 | A portable and adjustable limb shaker, weighing approximately 14 kg and powered by a 2.1 kW single-cylinder gasoline engine running at 8000 rpm, was employed to study almond fruit detachment. A vibration meter was used to monitor the shaking frequency. The experimental investigation followed a 4 × 3 factorial design, testing four frequency levels and three amplitude settings (20, 32.5, and 45 mm). | August 2010 | Iran (Siakhdarengon) | [105] |
| Almond | Limb Shaker System | CD: 200–250 | 16 | 50 | 5 | 90 | The portable and lightweight pneumatic branch shaker system was powered by an electric generator and air compressor, supplying compressed air and electricity. A programmable logic controller (PLC) controlled the vibration frequency, while a pantograph system adjusted the oscillation amplitude. The system consisted of a power supply unit (air tank, generator, gasoline engine) and a portable vibration arm with a double-action pneumatic cylinder for controlled shaking. | End of spring 2014 | Iran (Kherameh) | [106] |
| Nut Tree | Shaking Method | Frequency (Hz) | Amplitude (mm) | Duration (s) | Efficiency (%) | Description | Location | References |
|---|---|---|---|---|---|---|---|---|
| Almond | Prototype Vibrator System | 5 | 2 | — | — | A vibration table equipped with a variable-speed electric motor, an adjustable cam, and a triaxial accelerometer system was developed and used to reliably estimate the frequency and displacement characteristics of commercial almond trunk shakers. | USA (California) | [108] |
| Walnut | Vibration Harvester | 10–30 | 35–55 | 15 | — | A vibration harvester with adjustable frequency and amplitude was used. The device was powered by a 3 kW AC motor and controlled via a frequency converter. Vibrations were transmitted through a steel wire rope attached to the tree branch, with amplitude and frequency adjustments made by altering the rope’s position and the motor’s input voltage frequency. | China (Beijing) | [77] |
| Pecan | Vibrating Conveyor | 10 | 12 | — | 98 | The commercial tree shaker was part of a mechanical pecan harvester designed for efficient nut dislodging with minimal tree damage. The harvester was tractor-pulled and operated optimally after pre-sweeping nuts into windrows. It utilized a chain-to-soil pick-up mechanism with a rubber-fingered reel and inclined chain elevator, ensuring gentle nut retrieval with minimal soil disturbance. | Israel (Bet Dagan) | [79] |
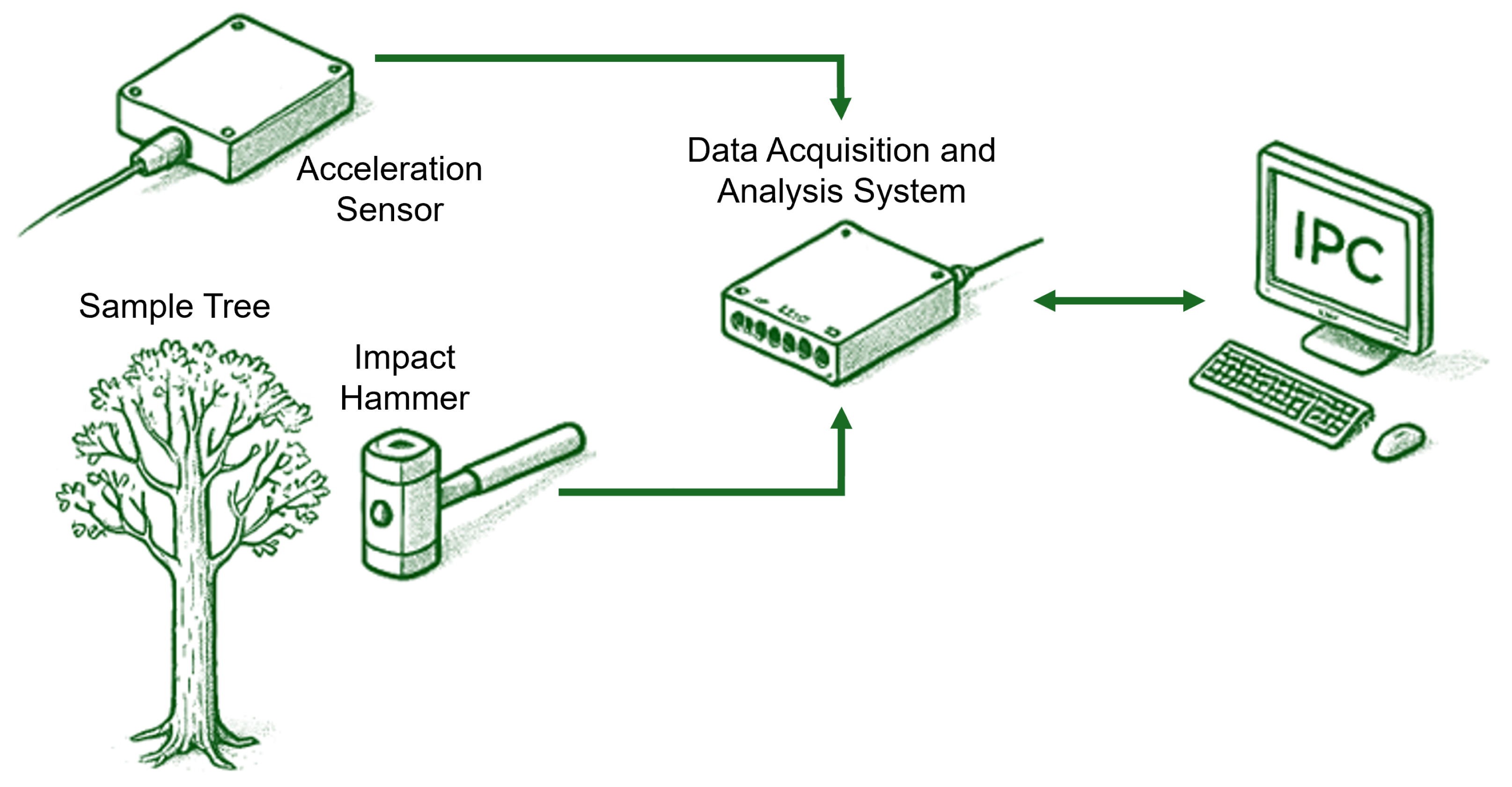
| Hickory | Impact Hammer | 5, 9, 12 | — | — | — | An impact hammer equipped with multiple hammerheads, designed for varying frequency ranges, was utilized. An accelerometer was installed at specific monitoring points on the tree sample to record acceleration responses. | China (Zhejiang) | [109] |
| Hickory | Vibrator Prototype | 22 | — | 16 | — | An inertial vibrating harvester was used to conduct tests, vibrating the target tree at a specific frequency and amplitude through centrifugal forces generated by the high-speed rotation of an eccentric mass. A finite element model of a Chinese hickory tree was developed using ANSYS for further analysis. | China (Zhejiang) | [110] |
| Hickory | Simulation | 22 | — | — | — | The hickory tree vibration model was developed using finite element analysis software, with ANSYS for harmonic response analysis and ADAMS for dynamic simulation. Excitation forces were applied through eccentric block mechanisms, generating vibration via centrifugal force from high-speed rotating masses. Three configurations were tested, single eccentric blocks, symmetrical eccentric blocks, and space-vertical eccentric blocks, each producing different force distributions. Excitation points were positioned at the treetop, trunk bifurcation, and trunk to simulate various vibration transmission patterns. The system was designed to analyze acceleration responses and vibration energy propagation for optimized harvesting efficiency. | China (Zhejiang) | [113] |
| Harvesting Method | Nut Tree | Advantages | Limitations | References |
|---|---|---|---|---|
| Compared to other methods, this technique is relatively more efficient for harvesting fruit because it can shake the entire tree simultaneously. | There is little capability for the size-selective harvesting of fruit. | [18,96] | ||
| Trunk Shaker | Pistachio Pine Almond | The trunk shaker is equipped with a conveyor belt mechanism that collects the fruits and directs them to the farm bins or wagons. | One of the problems with using trunk shakers is the high rate of bruising on the harvested fruit. | [9,117,118] |
| — | Unavoidably causes some damage to the fruit and bark of the trees. The intense vibration from the trunk shaker could completely rupture the tree bark. | [119,120] | ||
| The limb-shaking system is suitable for selectively picking fresh fruit due to its ability to excite each limb individually through vibration. | Relatively low harvest efficiency compared to other methods. | [18,121,122] | ||
| Using short shakes results in very little leaf removal from trees. | Causes significant defoliation of trees with its long vibration duration. | [123] | ||
| — | The hand-held limb shaker, which grips and vibrates each branch of fruit trees, makes harvesting fruit very difficult and requires a significant amount of labor. | [18] | ||
| Limb Shaker | Almond Pistachio | — | Damage to the bark is a major concern with limb shakers, often occurring at the attachment point. | [124] |
| Hand shakers have improved the efficiency of manual harvesting. Also, canopy shape and density do not limit the use of branch shakers or manual combs. The limb shaker assists workers in accessing the highest parts of the tree canopy. | Limb shakers lack a fruit collection mechanism, and their speed and efficiency depend on the operator. | [9,97] | ||
| — | Limb shakers cause vibrations to enter the operator’s hands and transfer to the hand and arm system, leading to structural problems in the human body. | [125] | ||
| Compared to other methods, canopy shaking systems are more efficient for fruit harvesting because they can simultaneously vibrate both sides of the tree canopy. When they are equipped with a catch frame and cushioning materials, the harvesting rate is two to three times higher than that of trunk shakers and fifteen times higher than handpicking. | There is little capability for size-selective harvesting of fruit. | [18,96,126] | ||
| Canopy Shaker | — | The canopy shake-and-catch harvesting system follows the same process for most fruit species, but it exhibits a wide variety of different harvesting patterns. | It can lead to extensive leaf shedding or even damage to the fruit. | [18] |
| The rods can contact tree branches, periodically impact tree limbs, and shake the entire tree canopy, resulting in the removal of fruit. | It is necessary to maintain contact between the machine and the tree canopy because high shaking amplitudes can break or damage the branches, while low amplitudes may not be sufficient to detach the fruits. Selecting the appropriate type of shaking rods is also very important. | [9,127] | ||
| — | The efficiency of fruit separation using an air shaker is relatively low if abscission chemicals are not used. It also requires significantly more power to produce an oscillating air blast, resulting in higher costs. | [18] | ||
| Air Shaker | — | — | This method is unsuitable for harvesting fresh fruit because it causes damage to the fruit. | [107,128] |
| — | Due to the size of the motors and fans used to generate the required energy, they are too large and heavy. | [129] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farajijalal, M.; Abedi, A.; Manzo, C.; Kouravand, A.; Maharlooei, M.; Toudeshki, A.; Ehsani, R. Assessing Crucial Shaking Parameters in the Mechanical Harvesting of Nut Trees: A Review. Horticulturae 2025, 11, 392. https://doi.org/10.3390/horticulturae11040392
Farajijalal M, Abedi A, Manzo C, Kouravand A, Maharlooei M, Toudeshki A, Ehsani R. Assessing Crucial Shaking Parameters in the Mechanical Harvesting of Nut Trees: A Review. Horticulturae. 2025; 11(4):392. https://doi.org/10.3390/horticulturae11040392
Chicago/Turabian StyleFarajijalal, Mohsen, Ali Abedi, Cristian Manzo, Amir Kouravand, Mohammadmehdi Maharlooei, Arash Toudeshki, and Reza Ehsani. 2025. "Assessing Crucial Shaking Parameters in the Mechanical Harvesting of Nut Trees: A Review" Horticulturae 11, no. 4: 392. https://doi.org/10.3390/horticulturae11040392
APA StyleFarajijalal, M., Abedi, A., Manzo, C., Kouravand, A., Maharlooei, M., Toudeshki, A., & Ehsani, R. (2025). Assessing Crucial Shaking Parameters in the Mechanical Harvesting of Nut Trees: A Review. Horticulturae, 11(4), 392. https://doi.org/10.3390/horticulturae11040392